Rediseño Mecatrónico y Control Difuso de un Robot Tipo Delta Edición Única
118
0
0
Texto completo
(2)
(3) INSTITUTO TECNOLÓGICO DE ESTUDIOS SUPERIORES DE MONTERREY DIVISIÓN DE MECATRÓNICA Y TECNOLOGÍAS INFORMACIÓN PROGRAMA DE GRA DUADOS EN MECATRÓNICA Y TECNOLOGÍAS DE INFORMACIÓN Los miembros del comité de tesis recomendamos que la presente tesis del Ing. Gabriel Antonio Rosales Martínez sea aceptada como requisito parcial para obtener el grado académico de: Maestro en Ciencias con Especialidad en Automatización Comité de tesis: ______________________________ Dr. Antonio Favela Contreras Asesor ______________________________ Dr. José de Jesús Rodríguez Ortiz Sinodal ______________________________ M.C. Manuel G. Cabrera López Sinodal _________________________________________ Dr. Gerardo Antonio Castañón Ávila Director de las Maestrías de Electrónica y Automatización de DMTI. Mayo 2010.
(4)
(5) DISEÑO MECATRONICO Y CONTROL DIFUSO DE UN ROBOT TIPO DELTA. POR: GABRIEL ANTONIO ROSALES MARTÍNEZ. TESIS. PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO ACADÉMICO DE: MAESTRO EN CIENCIAS CON ESPECIALIDAD EN AUTOMATIZACIÓN. INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY. Mayo 2010.
(6)
(7) DEDICATORIA A mis padres por haberme apoyado incondicionalmente en mis decisiones. A mis hermanos, Gualberto y Griselda quienes siempre estuvieron al pendiente de mí a pesar de la distancia que nos separa.. VII.
(8)
(9) AGRADECIMIENTOS A mi asesor, el Dr. Antonio Favela quien me apoyó en todo momento para sacar adelante mi trabajo de tesis. Al Dr. José de Jesús Rodríguez y al M.C. Manuel Cabrera por su interés y apoyo como sinodales en la presentación de este proyecto. A mi amiga y compañera de carrera y maestría Carolina Atilano por su valiosa amistad a lo largo de mi estancia en Monterrey. A mis compañeros de maestría: Eduardo Rivera, Jesús Sánchez, Jorge Claros, Ernesto Pérez, Luis Sandoval, Andrés Rosado, Enrique Jiménez, José Luis Turrubiates, Aldo Cedillo, Claudia Escalera, Raymundo Magaña por su amistad incondicional, en especial a Angelo Raimondi quien estuvo a lo largo de mi estancia en la. maestría dándome. sugerencias para mejorar día a día. A Rodrigo Vargas por su esfuerzo y dedicación dirigido al desarrollo del prototipo.. IX.
(10)
(11) Resumen En este trabajo de tesis presentado como requisito parcial para la obtención del grado de Maestro en Ciencias con Especialidad en Automatización, se presenta el desarrollo e implementación de un control difuso aplicado en un Robot Manipulador Delta. El control difuso está basado en reglas lingüísticas las cuales pretenden emular el conocimiento humano en un proceso. Debido a lo anterior, este esquema es ampliamente utilizado tanto en procesos lineales como no lineales. El Robot manipulador tipo Delta pertenece a los robots paralelos o de cadena cinemática cerrada, los cuales tienen la característica de alcanzar altas aceleraciones, sin embargo poseen una modelación cinemática complicada la cual se debe analizar para llevar a cabo cualquier esquema de control. Debido a esta desventaja se diseñó, construyó e implementó un novedoso sistema de sensado el cual permite calcular la posición del efector final sin la necesidad de realizar la modelación cinemática directa. Se realizó el rediseño mecatrónico de un prototipo de Robot Delta propiedad del Departamento de Mecatrónica y Automatización del Tecnológico de Monterrey con el fin de aplicar un controlador difuso y el sistema de sensado descrito anteriormente.. XI.
(12)
(13) Índice general Resumen...................................................................................................................... XI 1.. 2.. Introducción .............................................................................................................. 1 1.1. Definición del problema ................................................................................... 2. 1.2. Objetivos de la tesis .......................................................................................... 3. 1.3. Metodología ...................................................................................................... 3. 1.4. Alcances ............................................................................................................ 4. 1.5. Estructura .......................................................................................................... 4. Marco Teórico........................................................................................................... 5 2.1.. Introducción ...................................................................................................... 6. 2.2.. Robots Paralelos ............................................................................................... 7. 2.3.. Robot Manipulador Delta ............................................................................... 10. 2.3.1. 2.4.. 3.. Aplicaciones y Patentes .......................................................................... 11. Cinemática ...................................................................................................... 14. 2.4.1.. Trilateración ............................................................................................ 15. 2.4.2.. Trilateración como principio de funcionamiento de un GPS ................. 15. 2.4.3.. El método de trilateración aplicado a robótica ....................................... 18. 2.4.4.. Cinemática inversa .................................................................................. 22. 2.5.. Espacio de Trabajo.......................................................................................... 24. 2.6.. Resumen.......................................................................................................... 24. Desarrollo de un Manipulador Delta ...................................................................... 25 3.1.. Introducción .................................................................................................... 26. 3.2.. Diseño Mecánico ............................................................................................ 27. 3.2.1.. Diseño original del prototipo .................................................................. 28. 3.2.2.. Rediseño final del prototipo .................................................................... 30. 3.3.. Diseño Electrónico .......................................................................................... 33. 3.4.. Comunicación ................................................................................................. 35. 3.4.1.. Interfaz Humano-Máquina ...................................................................... 35 XIII.
(14) 3.4.2. 3.5. 4.. 4.1.. Introducción .................................................................................................... 42. 4.2.. Control Difuso ................................................................................................. 42. 4.2.1.. Fuzificación ............................................................................................. 43. 4.2.2.. Mecanismo de inferencia ........................................................................ 45. 4.2.3.. Defuzificación ......................................................................................... 46. 4.2.4.. Método de Centroide ............................................................................... 46. Implementación y sintonización del control difuso ........................................ 48. 4.3.1.. Fuzificación ............................................................................................. 48. 4.3.2.. Inferencia ................................................................................................. 49. 4.3.3.. Defuzificación ......................................................................................... 50. 4.4.. Resumen .......................................................................................................... 51. Pruebas y Análisis de Resultados ............................................................................ 53 5.1.. Introducción .................................................................................................... 54. 5.2.. Prueba I ........................................................................................................... 54. 5.2.1.. Prueba I.A................................................................................................ 54. 5.2.2.. Prueba I.B ................................................................................................ 58. 5.3.. Prueba II .......................................................................................................... 61. 5.3.1.. Prueba II.A .............................................................................................. 61. 5.3.2.. Prueba II.B .............................................................................................. 64. 5.4.. Prueba III ......................................................................................................... 68. 5.4.1.. Prueba III.A ............................................................................................. 68. 5.4.2.. Prueba III.B ............................................................................................. 71. 5.5. 6.. Resumen .......................................................................................................... 39. Diseño e Implementación de un controlador Difuso en un Manipulador Delta...... 41. 4.3.. 5.. Microcontrolador ..................................................................................... 38. Análisis de Resultados .................................................................................... 74. Conclusiones y Trabajos Futuros ........................................................................... 75 6.1.. Conclusiones ................................................................................................... 76. 6.2.. Trabajos futuros............................................................................................... 77. Bibliografía...................................................................................................................... 79 Apéndice A ...................................................................................................................... 81 Apéndice B ...................................................................................................................... 88.
(15) XV.
(16)
(17) Lista de figuras Figura 2-1 – Estructura cinemática de un robot a) serial b) paralela ................... 8 Figura 2-2 – Robot Delta, U.S. Patent number 4,976,582 [14] .......................... 11 Figura 2-3 – Modelo de Robot delta IRB 340 de ABB para operaciones de “pick-and-place” ................................................................................................. 12 Figura 2-4 – Robots Hitachi Seiki con cnfiguración delta para apliaciones de a) “pick-and-place” y .............................................................................................. 12 Figura 2-5 – U.S. Pantent No. US2006/0182602 a) Robot Delta b) Vista de la articulación c) Tracción de reacción libre ........................................................... 13 Figura 2-6 – U.S. Patent No. 6,516,681 .............................................................. 14 Figura 2-7 – Esfera con radio r1 formada por un satélite .................................... 16 Figura 2-8 – Intersección de dos esferas ............................................................. 17 Figura 2-9 – Intersección de tres esferas ............................................................ 17 Figura 2-10 – Sensores montados en la base fija del robot delta ........................ 18 Figura 2-111 – Sistema coordenado formado por la geometría de los sensores. 19 Figura 2-12 – Número de articulación en el Robot Delta ................................... 20 Figura 2-13 - Geometría para el metodo de trilateración.................................... 20 Figura 2-14 - Descripción de la geometría del brazo i ...................................... 22 Figura 2-15 – Espacio de trabajo para el prototipo de Robot Delta ................... 24 Figura 3-1 – Prototipo desarrollado en el Departamento de Mecatrónica y Automatización del Instituto Tecnológico y de Estudios Superiores de Monterrey campus Monterrey ............................................................................ 26 Figura 3-2 – Estructura Inicial del prototipo ...................................................... 28 Figura 3-3 - Vista de a) mecanismo de tracción y b) Union entre antebrazo y brazo.................................................................................................................... 29 Figura 3-4 – Base movil del manipulador .......................................................... 30 Figura 3-5 – Ajustes mecánicos implementados en el prototipo ........................ 31 Figura 3-6 – Vista de los sensores de desplazamiento instalados en la base fija del manipulador .................................................................................................. 32 Figura 3-7 – Estructura final del prototipo ......................................................... 32 Figura 3-8 - Esquemático de la conexión electrónica del microcontrolador ...... 33. XVII.
(18) Figura 3-9 – Esquemático electrónico para el protocolo de comunicación RS232 ............................................................................................................................. 34 Figura 3-10 – Esquematico del encapsulado GENCODRIVER 6320 ................ 35 Figura 3-11 – IHM diseñada para el control del manipulador ............................ 36 Figura 3-12 – Detalle de la IHM ......................................................................... 37 Figura 3-13 – Pseudocódigo implementado en LabView® ................................ 38 Figura 3-14 – Esquemático general de la electrónica y comunicación del manipulador Delta ............................................................................................... 39 Figura 4-1 – Diagrama de bloques de un esquema de control difuso ................. 42 Figura 4-2 – Estructura del Controlador Difuso ................................................. 43 Figura 4-3 - Defuzificación por centroide .......................................................... 47 Figura 4-4 – Términos lingüisticos activos a) de entrada y b) de salida para una entrada igual a diez ............................................................................................. 47 Figura 4-5v– Área formada con los términos lingüisticos activos de salida ...... 48 Figura 4-6 - Lazo de control implementado en el prototipo Delta ..................... 48 Figura 4-7 – Conjuntos difusos para el error en la posición angular .................. 49 Figura 4-8 - Conjuntos difusos de salida ............................................................ 50 Figura 5-1 -Respuesta de las articulaciones del robot para la prueba I.A de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P sin carga. ................................................................................................................... 55 Figura 5-2 - Respuesta espacial del robot para la prueba I.A de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P sin carga. .............. 57 Figura 5-3 - Respuesta de las articulaciones del robot para la prueba I.B de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P sin carga. ................................................................................................................... 59 Figura 5-4 - Respuesta espacial del robot para la prueba I.B con cambio de posición de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P con carga de 0.20 kilogramos. .............................................................. 60 Figura 5-5 - Respuesta de las articulaciones del robot para la prueba II.A con cambio de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga. ................................................................................................ 62 Figura 5-6 - Respuesta espacial del robot para la prueba II.A con para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga. ................................................................................................ 64 Figura 5-7 - Respuesta articular para la prueba II.B con cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P con carga de 0.20 kilogramos .................................................................................... 65.
(19) Figura 5-8 - Respuesta espacial del robot para la prueba II.B con para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P con carga de 0.20 kilogramos. ............................................................... 67 Figura 5-9 - Respuesta articular para la prueba III.A con cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga .............................................................................................................. 69 Figura 5-10 - Respuesta espacial del robot para la prueba III.A con cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga. ............................................................................................... 70 Figura 5-11 - Respuesta articular para la prueba III.B con cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (-100, 0, -450) con respecto al punto P con carga de 0.20 kilogramos. ............................................................................ 72 Figura 5-12 - Respuesta espacial del robot para la prueba III.B con cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (-100, 0, -450) con carga ... 73. XIX.
(20)
(21) Lista de tablas Tabla 2-1 – Ventajas y desventajas de los robots paralelos con respecto a robots seriales ................................................................................................................ 10 Tabla 4-1 – Funciones de membresía más comunes para la fuzificación ........... 44 Tabla 4-2 - Tabla de implicaciones difusas para dos variables y una salida con cinco conjuntos difusos. PG: positivo grande; PP: positivo pequeño; C: cero; NP negativo pequeño; NG: negativo grande. ........................................................... 46 Tabla 4-3 - Tabla de implicaciones difusas para el controlador ......................... 50 Tabla 5-1 - Índices de desempeño para la prueba I.A con cambio de posición de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P sin carga. ................................................................................................................... 56 Tabla 5-3 - Índices de desempeño para la prueba I.B con cambio de posición de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P con carga de 0.20 kilogramos. ................................................................................... 59 Tabla 5-4 - Índices de desempeño para la prueba I.B con cambio de posición de (xo, yo, zo) = (0, 0, -500) a (xf, yf, zf) = (0, 0, -300) con respecto al punto P con carga de 0.20 kilogramos. ................................................................................... 60 Tabla 5-5 - Índices de desempeño para la prueba II.B con cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga. ................................................................................................................... 63 Tabla 5-6 – Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga. ................ 64 Tabla 5-7 - Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P con carga de 0.20 kilogramos .......................................................................................................... 66 Tabla 5-8 -Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P con carga de 0.20 kilogramos. ......................................................................................................... 67 Tabla 5-9 - Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga ........... 69 Tabla 5-10 - Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (0, 100, -450) con respecto al punto P sin carga. ............. 70 Tabla 5-11 - Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (-100, 0, -450) con carga de 0.20 kilogramos. ................ 72 Tabla 5-12 - Índices de desempeño para cambio de posición de (xo, yo, zo) = (0, 0, -450) a (xf, yf, zf) = (-100, 0, -450) con carga. ................................................ 73. XXI.
(22)
(23) 1.. Introducción. Actualmente el uso de robots en la industria se ha hecho indispensable para la producción diaria de muchas de las empresas manufactureras en todo el mundo. Debido a esta creciente necesidad se ha visto un gran avance científico, teórico y práctico en el área de la robótica. Dos grandes familias de robots son fácilmente identificables: robots seriales (de cadena cinemática abierta) y robots paralelos (de cadena cinemática cerrada). Estos últimos no tienen extremos libres y cada uno de los extremos de sus brazos forma una cadena cerrada. A diferencia de los robots paralelos, los robots seriales suelen tener un extremo libre para manipulación de objetos mientras el otro extremo está unido a la base del robot [9]. Debido a que su configuración reduce significativamente las masas en movimiento, por ende son capaces de alcanzar grandes aceleraciones, los robots de cadena cinemática cerrada han sido objeto de intensos estudios científicos recientes [20]. El Robot Manipulador Delta pertenece a la familia de robots paralelos y es uno de los robots más simples de esta categoría ya que, mecánicamente hablando, es capaz de alcanzar una alta aceleración al coste de tener un espacio de trabajo más limitado y difícil de 1.
(24) Capítulo 1: Introducción modelar [3]. Para este tipo de manipulador se han desarrollado esquemas de convencionales, incluso aplicando algunas estrategias de control avanzado dentro del control convencional, sin embargo, expertos concuerdan que es necesario implementar técnicas de control que excluyan el control clásico, es decir, esquemas predictivo-adaptivo, difuso, sistemas expertos o deslizante. El control difuso es una metodología que permite expresar las reglas de operación de un sistema en términos lingüísticos en lugar de ecuaciones matemáticas. Es un esquema tal que permite emular la experiencia de operadores y expertos en el proceso, lo cual permite tener un buen desempeño en zonas altamente no lineales. En [3] y [11] se presenta una modelación cinemática y dinámica para este tipo de robot manipulador y se propone una estrategia de control supervisorio en el que los parámetros de un control clásico PID son modificados por una ganancia a partir del error y el cambio de éste. En este trabajo de tesis se retoma el uso de este manipulador, ya que se cuenta con un prototipo físico desarrollado en el departamento de Mecatrónica y Automatización del Instituto Tecnológico y de Estudios Superiores de Monterrey campus Monterrey. En él se implementan los modelos cinemáticos inversos y se propone una novedosa forma de calcular la posición del efector final en el espacio; además se diseña e implementa un esquema de control difuso para controlar la posición angular de cada articulación y por ende, su posición espacial.. 1.1 Definición del problema Se identifica un área de oportunidad en el control de posición en un manipulador paralelo tipo Delta, ya que se han desarrollado técnicas convencionales así también como una mezcla entre control clásico y control avanzado, sin embargo una técnica enteramente difusa no se ha visto aplicado en este tipo de manipuladores. Se elige este tipo de manipulador ya que proporciona las ventajas de la familia de los manipuladores de estructura cinemática cerrada siendo la plataforma más sencilla de implementar. 2.
(25) 1.2 Objetivos de la tesis El objetivo de la tesis es desarrollar una estrategia de control avanzado basado en el esquema de control difuso para el control de la posición de un robot manipulador tipo delta con actuadores rotacionales. Con este objetivo se pretende obtener una buena regulación de las variables de operación que intervienen en el proceso. Se entiende como buena regulación lograr obtener el conjunto de valores de manipulación para que la posición del robot alcance la referencia deseada en un mínimo de tiempo sin que llegue a presentarse el sobretiro en su desempeño. Con el fin de lograr el objetivo general de la tesis se proponen los siguientes objetivos específicos. -. Proponer modificaciones físicas para el prototipo con el fin de mejorar su diseño mecánico, electrónico, sensorial y de comunicación.. -. Obtener un modelo matemático que sustituya al análisis cinemático directo.. -. Diseñar e implementar un esquema de control Supervisorio difuso a través de un software especializado.. 1.3 Metodología Para alcanzar los objetivos mencionados anteriormente se siguió la siguiente metodología: . Analizar y validar los modelos matemáticos que gobiernan al manipulador.. . Determinar los parámetros geométricos y físicos para el cálculo de dichas ecuaciones.. . Elaborar e implementar un sistema de sensado el cual facilite la modelación cinemática.. . Desarrollar los modelos cinemáticos en el software de programación gráfica de National Instruments LabView®.. 3.
(26) Capítulo 1: Introducción . Diseñar y sintonizar el control difuso según la dinámica de la planta.. . Agregar el algoritmo de control a la plataforma de programación gráfica LabView®.. . Desarrollar e implementar una interfaz electrónica para la comunicación entre los actuadores y el software LabView®.. . Realizar pruebas y analizar resultados.. . Elaborar conclusiones en base a lo obtenido en el punto anterior.. 1.4 Alcances El alcance de la presente tesis abarcará la modelación del manipulador Delta y el diseño e implementación de un control difuso sobre este. Así también como la implementación de un sistema de sensado para determinar la posición del efector final en el espacio.. 1.5 Estructura La estructura general de este documento es como sigue: En el capítulo dos se describe el estado del arte de los manipuladores paralelos tipo Delta. También se describe y analiza la modelación cinemática del mismo. En el capítulo tres se describe el prototipo del manipulador Delta donde se ha implementado la estrategia de control. En el capítulo cuatro se muestra la etapa de diseño e implementación del control difuso para el manipulador Delta. Los resultados y análisis de las pruebas realizadas se presentan en el capítulo cinco. En el capítulo seis se finaliza con las conclusiones y trabajos futuros.. 4.
(27) 2.. Marco Teórico. En este capítulo se introducen conceptos utilizados en la robótica paralela. En la primera parte se definen y clasifican los robots paralelos. Sucesivamente se describen aplicaciones y patentes referentes al manipulador tipo Delta. En la parte central del capítulo se muestra la forma de calcular la posición del efector final mediante el método de trilateración sustituyendo por completo el análisis de la cinemática directa. Finalmente se describe el análisis de la cinemática inversa mediante el método geométrico y se muestra el espacio de trabajo del Robot Delta. 5.
(28) Capítulo 2: Marco Teórico. 2.1. Introducción Existen ciertas dificultades a la hora de establecer una definición formal de lo que es un robot industrial. La primera de ellas surge de la diferencia conceptual entre el mercado japonés y el euro-americano de lo que es un robot y lo que es un manipulador. Así, mientras que para los japoneses un robot industrial es cualquier dispositivo mecánico dotado de articulaciones móviles destinado a la manipulación, el mercado occidental es más restrictivo, exigiendo una mayor complejidad, sobre todo en lo relativo al control. En segundo lugar, y centrándose ya en el concepto occidental, aunque existe una idea común acerca de lo que es un robot industrial, no es fácil ponerse de acuerdo a la hora de establecer una definición formal [8]. Además, la evolución de la robótica ha ido obligando a diferentes actualizaciones de su definición. La definición más comúnmente aceptada posiblemente sea la de la Asociación de Industrias Robóticas (RIA), según la cual: “Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas.”´[18] Esta definición, ligeramente modificada, ha sido adoptada por la Organización Internacional de Estándares (ISO) que define al robot industrial como: “Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas.”[12] Mientras que la Federación Internacional de Robótica (IFR) distingue entre robot industrial de manipulación y otros robots: “Por robot industrial de manipulación se entiende una máquina de manipulación automática, reprogramable y multifuncional con tres o más ejes que pueden posicionar y orientar materias, piezas, herramientas o dispositivos especiales para la ejecución de trabajos diversos en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento.”[17] 6.
(29) En esta definición se debe entender que la reprogramabilidad y la multifunción se consiguen sin modificaciones físicas del robot. Común en todas las definiciones anteriores es la aceptación del robot industrial como un brazo mecánico con capacidad de manipulación y que incorpora un control más o menos complejo. Un sistema robotizado, en cambio, es un concepto más amplio. Engloba todos aquellos dispositivos que realizan tareas de forma automática en sustitución de un ser humano y que pueden incorporar o no a uno o varios robots, siendo esto último lo más frecuente. La AFRI (Asociación Francesa de Robótica Industrial) propone la siguiente clasificación basadas en “tipos” de robots [4]: -. Manipulador con control manual o telemando.. -. Manipulador automático con ciclos pre-ajustados; regulación mediante fines de carrera o topes; control por PLC; accionamiento neumático, eléctrico o hidráulico.. -. Robot programable con trayectoria punto a punto. Carece de conocimiento sobre su entorno.. -. Robot programable con trayectoria continúa “particular” (rectas, espirales, círculos). Carece de conocimiento sobre su entorno.. -. Robot programable con trayectoria continua “general” (múltiples trayectorias programables). Carece de conocimiento sobre su entorno.. 2.2. Robots Paralelos Las primeras máquinas que se diseñaron con arquitecturas paralelas fueron para realizar pruebas neumáticas y simuladores de vuelo como la estructura de Stewart [2]. En los últimos años, los robots con estructura paralela empezaron a ser objeto de interés no solo a nivel industrial sino también a nivel científico. 7.
(30) Capítulo 2: Marco Teórico En la actualidad existen varios criterios para la clasificación de robots. Como se mencionó anteriormente, un criterio de clasificación puede ser su nivel de “inteligencia”. Otro criterio de clasificación puede ser según su estructura cinemática; y se pueden clasificar en robots seriales, paralelos o híbridos. Un robot es serial cuando su estructura cinemática es una cadena en lazo abierto (Figura 2.1a); es paralelo si tiene una o varias cadenas en lazo cerrado (Figura 2.1b), y; es híbrido cuando contiene tanto cadenas en lazo cerrado como cadenas en lazo abierto.. a). b). Figura 2-1 – Estructura cinemática de un robot a) serial b) paralela. La gran mayoría de los robots comerciales utilizados en la industria son de estructura serial, sin embargo, la aplicación de robots paralelos ha ganado terreno debido a las ventajas que estos presentan sobre los seriales. Sin embargo, al comparar robots con estructuras paralelas contra robots con estructuras seriales, la discusión se centra en características como la relación carga-masa del robot, precisión, espacio alcanzable, repetibilidad, entre otras. A continuación se enlistan los principales elementos de comparación: . Relación carga-masa del robot. En las estructuras seriales el efector final, junto con el objeto a manipular, se encuentran en el extremo de toda cadena. Como consecuencia, cada actuador necesita la suficiente potencia, no solo para cargar el objeto, sino los eslabones y actuadores que se encuentran en medio. Lo que resulta 8.
(31) en una baja relación carga-masa del robot. En cambio, en las estructuras paralelas, la carga del objeto a manipular esta soportada directamente por los actuadores; además las articulaciones se pueden colocar cerca de la base fija. Por lo tanto, los eslabones entre la base fija y la base móvil pueden ser más ligeros y la relación carga-masa es mucho más grande, generalmente en un factor de al mendos de 10 [16]. . Movimiento espacial. Dentro de los robots paralelos, las arquitecturas ocasionan que haya ciertas regiones dentro de su espacio de trabajo que sean imposibles de alcanzar. Estas regiones se deben a la presencia de singularidades dentro de su espacio de trabajo.. . Espacio Alcanzable. Esta característica se podría considerar una desventaja que tiene la estructura paralela, ya que el espacio alcanzable es relativamente pequeño si se le compara con el de las estructuras seriales. En estructuras paralelas este se determina con la intersección de los espacios de trabajo de todas las cadenas cinemáticas que conforman dicha estructura.. . Precisión y Repetibilidad. Los robots seriales van acumulando el error de una articulación a otra, de igual forma la fricción y la flexibilidad también se comportan de manera serial afectando al error global del robot. En cambio, los robots paralelos no presentan esta situación puesto que el error en vez de acumularse se divide debido a que las articulaciones de sus brazos no dependen de las demás.. . Análisis Cinemático. Para los robots paralelos es más sencillo el análisis cinemático inverso que el directo, a diferencia de los robots paralelos donde existe una mayor simplicidad al hacer el análisis cinemático directo.. Por lo que, en general, se puede establecer una tabla comparativa de las ventajas y desventajas de un robot paralelo con respecto a un robot serial tal y como la muestra la Tabla 2.1. 9.
(32) Capítulo 2: Marco Teórico Ventajas. Desventajas. Arquitectura más rígida. Espacio de trabajo reducido. Mayor precisión y repetibilidad. Cinemática compleja. Altas aceleraciones. Arquitectura mecánica compleja. Mayor relación carga-masa. Configuraciones singulares. Mejores características dinámicas Tabla 2-1 – Ventajas y desventajas de los robots paralelos con respecto a robots seriales. 2.3. Robot Manipulador Delta Uno de los robots paralelos más simples es el robot tipo delta por tener tres grados de libertad y una estructura de tres brazos que pueden ser articulados o de movimiento lineal. Este tipo de manipulador fue diseñado y patentado por R. Clavel en 1991, con la idea de tener un robot capaz de alcanzar grandes aceleraciones para la manipulación de objetos. El diseño original (ver Figura 2.2) está constituido por tres cadenas cinemáticas paralelas unidas a una base móvil, cada una estas cadenas son dirigidas por tres actuadores rotacionales que se encuentran acoplados a una base fija del robot. El movimiento de la base móvil se logra por la combinación del movimiento de los brazos y transmitidos a la base móvil por los antebrazos a través de dos rótulas. La combinación de las contribuciones de las tres cadenas cinemáticas y de los antebrazos provoca que la base móvil siempre se mantenga paralela a la base fija. Idealmente su espacio alcanzable se encuentra en la intersección de las tres esferas provocadas por los tres brazos. El Robot Delta, al pertenecer a la familia de estructuras paralelas cómprate la característica de tener mayor precisión y rigidez que los robots seriales. De igual manera, debido a las pocas masas en movimiento, su estructura paralela le permite obtener altas aceleraciones por lo que se utiliza principalmente en aplicaciones donde se requiere manipular objetos con precisión y velocidad.. 10.
(33) Figura 2-2 – Robot Delta, U.S. Patent number 4,976,582 [14]. 2.3.1. Aplicaciones y Patentes El robot Delta fue introducido al mercado por Demaurex, cuyo objetivo era el comercializar el robot para la industria del empaquetamiento; y por ABB bajo el nombre de IRB 340 FlexPicker.. Aplicaciones Industriales Debido a que el robot Delta fue diseñado para aplicaciones de manipulación de objetos el área fuerte de este tipo de robots son las operaciones llamadas “fast pick-and-place”. ABB ha diseñado robots delta para incorporarse a las industrias farmacéuticas, alimenticias y electrónicas. El principal modelo comercial es el IRB 340 felxpicker (Figura 2-3). También existen aplicaciones para las operaciones de maquinado, un ejemplo es el robot desarrollado por el grupo Krause and Mauser. Ellos desarrollaron el Quickstep, una fresadora CNC con tres grados de libertad. Adicionalmente, la compañía Hitahi Seiki manufactura robots Delta de pequeñas dimensiones para trabajo de empaquetamiento y perforado.. 11.
(34) Capítulo 2: Marco Teórico. Figura 2-3 – Modelo de Robot delta IRB 340 de ABB para operaciones de “pick-and-place”. a). b). Figura 2-4 – Robots Hitachi Seiki con cnfiguración delta para apliaciones de a) “pick-and-place” y b) fresadora CNC. 12.
(35) Patentes Sucesoras al invento registrado por Clavel, diversas patentes han surgido proponiendo alguna mejora al manipulador Delta, con respecto a máquinas herramientas con tecnología de manipuladores paralelos, sobre la modificación de articulaciones o mecanismos, entre otras. Una de las patentes más recientes e innovadoras es la registrada por Persson [16], la cual propone un sistema de tracción de reacción libre (Figura 2-5). Es decir, no presenta reacciones en los engranes de la transmisión permitiendo así una optimización del robot en su rigidez, características de control, requerimiento espacial, velocidad y precisión en el posicionamiento. Otra de las patentes menciona la modificación de la estructura Delta al agregarle un cuarto brazo (Figura 2-6), es decir, que cada brazo este a 90̊ con respecto al brazo más cercano, esta adición permite aumentar el reducido espacio de trabajo del robot Delta así como aumentar la rigidez estructural y posicionar la base móvil con rigidez y precisión.. a). b). c). Figura 2-5 – U.S. Pantent No. US2006/0182602 a) Robot Delta b) Vista de la articulación c) Tracción de reacción libre. 13.
(36) Capítulo 2: Marco Teórico. Figura 2-6 – U.S. Patent No. 6,516,681. 2.4. Cinemática La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa principalmente por la descripción analítica del movimiento espacial del robot como una función del tiempo, y en particular por las relaciones entre la posición y la orientación del efector final con los valores que toman las coordenadas de sus articulaciones. Se conocen dos planteamientos de modelos cinemáticas: modelo cinemático directo y modelo cinemático inverso. El objetivo del análisis de la cinemática directa es el encontrar el punto en el espacio del efector final en función de los ángulos de cada articulación. Mientras que el modelo cinemática inverso consiste en determinar la posición que deben tener las articulaciones para que el efector final llegue a una posición conocida. En los robots paralelos, a diferencia de los robots seriales, el análisis de la cinemática directa llega a ser complejo, no así para la inversa. Es por esta razón que se emplea un método alterno para encontrar el punto deseado respecto a un sistema coordenado de referencia x, y, z denominado trilateración.. 14.
(37) 2.4.1. Trilateración La trilateración es el principio base para la localización en el sistema de posicionamiento global (GPS) ya que aunque la tierra contiene 24 satélites, solamente se necesitan 3 para poder encontrar un objeto y un cuarto para solucionar algún error en el tiempo de localización [13].. Por tal motivo resulta muy importante primeramente explicar el. funcionamiento de la trilateración en un sistema GPS para que sirva como antecedente y una forma de comprender más fácilmente el método antes de explicarlo más a detalle.. 2.4.2. Trilateración como principio de funcionamiento de un GPS El sistema GPS está formado por 24 satélites y cinco estaciones terrestres además del receptor del usuario. Estos satélites, a partir de la información incluida en ellos y la que reciben de las estaciones, generan una señal que transmiten a los receptores. Una vez que los receptores reciben esta señal, calculan la posición. Debido a que las señales de radio son transmitidas por un grupo de satélites artificiales cuyas orbitas se conocen con precisión, es posible calcular la distancia del transmisor al receptor. Si medimos las distancias de al menos tres diferentes satélites a un punto sobre la tierra, es posible determinar la posición de dicho punto por trilateración. Para llevar a cabo el proceso de trilateración, el receptor GPS calcula la distancia hasta el satélite midiendo el tiempo que tarda la señal en llegar hasta él. Para ello, el GPS necesita un sistema muy preciso para medir el tiempo. Además, es preciso conocer la posición exacta del satélite. Finalmente, la señal recibida debe corregirse para eliminar los retardos ocasionados. Una vez que el receptor GPS recibe la posición de al menos cuatro satélites y conoce su distancia hasta cada uno de ellos, puede determinar su posición superponiendo las esferas imaginarias que generan. Como se mencionó anteriormente tres satélites podrían parecer suficientes para resolver la posición que se está buscando, ya que el espacio tiene tres dimensiones y una posición en la superficie de la Tierra se puede suponer. Sin embargo, incluso un error de reloj muy pequeño, multiplicado por la velocidad de la luz (la velocidad con que se propagan las 15.
(38) Capítulo 2: Marco Teórico señales satelitales), resulta en un error de posición de gran tamaño. Por lo tanto los receptores utilizan cuatro o más satélites para resolver la ubicación del receptor y el tiempo. A pesar de utilizar cuatro satélites para obtener una operación normal, se pueden utilizar menos si se aplican en casos especiales. Si una variable ya es conocida, un receptor puede determinar su posición con sólo tres satélites. (Por ejemplo, un barco o avión ya tiene la variable de elevación conocida). Suponiendo que un receptor en la Tierra capta la señal de un primer satélite determinando la distancia entre ambos. Esto solamente indicaría que el receptor puede ser ubicado en un punto cualquiera dentro de la superficie de una esfera de un radio r1:. Figura 2-7 – Esfera con radio r1 formada por un satélite. Si se mide la distancia de un segundo satélite al mismo receptor se generará una superficie esférica de radio R2, que al intersecarse con la primera esfera se formará un círculo en cuyo perímetro pudiera ser ubicado el punto a medir.. 16.
(39) Figura 2-8 – Intersección de dos esferas. Si se agrega una tercera medición, la intersección de la nueva esfera con las dos anteriores se reduce a dos puntos sobre el perímetro del círculo descrito.. Figura 2-9 – Intersección de tres esferas. Para automóviles y otros vehículos cercanos a la Tierra, la posición correcta del receptor GPS es la intersección más cercana a la superficie de la Tierra. Para los vehículos de espacio, la intersección más lejana de la Tierra puede ser la correcta. La posición correcta 17.
(40) Capítulo 2: Marco Teórico para el receptor GPS es también la intersección cercana a la superficie de la esfera que corresponde al cuarto satélite. Para resolver un problema de trilateración tridimensional es necesario tomar las fórmulas de 3 esferas y proceder a igualarlas. Para poder realizar esto es necesario tener tres limitaciones referentes a los centros de las esferas: -. Todas deben de estar en el plano z=0.. -. Una esfera debe estar colocada en el origen.. -. La tercera esfera debe estar sobre el eje x.. Es posible, sin embargo, trasladar cualquier conjunto de tres puntos para cumplir con estas limitaciones, encontrar el punto solución, y luego invertir la traslación para encontrar el punto solución en el sistema de coordenadas original.. 2.4.3. El método de trilateración aplicado a robótica Debido a que el método de trilateración necesita tres puntos conocidos para determinar un punto deseado en el espacio, se diseñaron, construyeron e implementaron tres sensores de desplazamiento los cuales calculan la distancia de cada uno de los tres radios de las esferas imaginarias y se montaron en la base fija del prototipo físico del manipulador paralelo tipo delta formando un triangulo equilátero de 163 mm de lado (Figura 2-10).. Figura 2-10 – Sensores montados en la base fija del robot delta. 18.
(41) Dichos sensores poseen un hilo de nylon los cuales son pivoteados para forman la geometría triangular representada en la Figura 2-11 como los puntos P1, P2 y P3 estableciendo un sistema coordenado con la misma referencia que tiene el punto OEF de la plataforma móvil. Es decir se establece una referencia absoluta siendo el punto P el origen de esta referencia (Figura 2-13). De esta forma, sin importar la posición en la que se encuentre el punto OEF, se podrá calcular su posición mediante la metodología de trilateración explicada anteriormente.. Figura 2-111 – Sistema coordenado formado por la geometría de los sensores. Cada uno de los puntos pivoteados, P1, P2 y P3, fueron físicamente alineados con cada una de las articulaciones, es decir, el punto P1 con la articulación 1, el punto P2 con la articulación 2 y el punto P3 con la articulación 3 respectivamente (Figura 2-12) .Esto se hizo con el fin de referenciar la articulación 1 con el eje de las y.. 19.
(42) Capítulo 2: Marco Teórico. Figura 2-12 - Número de articulación en el Robot Delta. Figura 2-13 - Geometría para el metodo de trilateración. Al estar los radios de las esferas en el mismo plano z sus ecuaciones quedarían como r. 2 1. = x + (y - y ) + z. r = (x 2. 2. r. 2 3. 2. 2. (2.1). 2. 1. + (y - y ). 2. x). 2. 2. 2. = (x - x ). 2. 3. + (y - y ). 2. 3. 20. + z. 2. +z. 2. (2.2) (2.3).
(43) Al restar 2.3 de 2.2. (2.4). Al reducir términos y estableciendo la igualdad y = y se despeja para x 2. 3. (2.5). Al restar 2.3 de 2.1. (2.6). Reduciendo términos y despejando para y. (2.7). Al despejar z de 2.1. (2.8). Para la ecuación 2.8 se tendrían dos valores z+ y z para la intersección de las tres esferas en -. el eje z, sin embargo, de la forma que está establecido el eje coordenado podemos descartar automáticamente el valor positivo ya que físicamente este valor es inalcanzable por la base móvil del manipulador prototipo Delta, por lo que el valor correcto siempre será el negativo para la coordenada z del punto O . E F. 21.
(44) Capítulo 2: Marco Teórico. 2.4.4. Cinemática inversa Existen varias metodologías para la cinemática inversa, Newton-Rhampson, método geométrico, etc. Debido a la facilidad del análisis en el método geométrico, en donde se utilizan teoremas trigonométricos y proyecciones sobre planos, se utilizará para dar solución al problema de calcular el ángulo en el brazo i (i = 1, 2, 3) a partir del conocimiento del punto OEF. Primeramente, el punto OEF se traslada hacia el punto Ci del brazo i con la siguiente matriz. (2.9). a). Vista frontal. b) Vista lateral. Figura 2-14 - Descripción de la geometría del brazo i. Siendo C el punto relativo a el eje coordenado x , y , z , b' la longitud del brazo b i. i. proyectado en el plano x z . Y P O i;. i. E F. i. i. el vector de la posición del punto O relativo al eje EF. coordenado xi, zi.. 22.
(45) Debido a que el cálculo de la proyección b' es necesaria para el método geométrico, éste se calcula siendo su valor:. (2.10). Los lados a y b' del brazo i forman un triangulo siendo el segmento A C el vector que va I. I. de A al punto C . Este vector forma un ángulo con este segmento A B llamado 0 , y la i. i. I. I. 2i. horizontal forma un ángulo 9 con el vector A C por lo que: 3i. I. I. (2.11). Al resolver para 9 se usa la tangente inversa siendo: 3i. (2.12). Aplicando la ley de cosenos se resuelve para encontrar 9. 2i. (2.13). 23.
(46) Capítulo 2: Marco Teórico. 2.5. Espacio de Trabajo. El cálculo del espacio de trabajo del robot Delta es equivalente a la intersección de los volúmenes que forma cada articulación, de esta forma, los puntos alcanzables por cada brazo describen una esfera de radio el antebrazo del robot (parámetro a), siendo el codo del robot su centro(punto B). De esta manera, el espacio alcanzable por el efector final es la intersección de los tres volúmenes en forma de toroide que se forman en cada brazo.. a) Vista Isométrica. b) Vista Superior. Figura 2-15 – Espacio de trabajo para el prototipo de Robot Delta. 2.6. Resumen En el presente capítulo se presentó el estado del arte del tipo de robot paralelo utilizado en este trabajo de tesis: El Robot Delta. Se definió tanto el método alterno utilizado para determinar la posición del efector final respecto a un sistema coordenado absoluto denominado trilateración como también el sistema de sensado el cual es una implementación de vanguardia en este tipo de manipuladores. Es decir, la presencia de este tipo de aplicación en el mercado es inexistente. Así también se presentó el análisis de la cinemática inversa mediante el método geométrico el cual es sencillo de aplicar debido a que es demostrada trigonometría simple. 24.
(47) 3.. Desarrollo de un Manipulador Delta. En este capítulo se hace una descripción del prototipo desarrollado en el Departamento de Mecatrónica y Automatización del Instituto Tecnológico y de Estudios Superiores de Monterrey campus Monterrey y que sirve para la implementación de un control difuso expuesto en el capítulo cuatro. Al principio se presenta el diseño mecánico, seguido del diseño electrónico y por último el sistema de comunicación utilizado. Al final de la sección de comunicación se describe la interfaz humano-máquina y el algoritmo implementado para el control del manipulador.. 25.
(48) Capítulo 3: Desarrollo de un Manipulador Delta. 3.1. Introducción Como parte del trabajo de investigación de esta tesis, se ha continuado con la coordinación del proyecto de construcción de un prototipo del Robot Delta con actuadores rotacionales. Este proyecto se ha venido desarrollando en el Departamento de Mecatrónica y Automatización del Instituto Tecnológico y de Estudios Superiores de Monterrey campus Monterrey. El desarrollo permitirá la implementación y evaluación de esquemas de control como lo son el control adaptable, predictivo y experto; control difuso; control con antealimentación, entre otros. Además de contar con otras aéreas de desarrollo en robótica como lo puede ser la implementación de sistemas de visión, planeación de trayectorias, etc.. Figura 3-1 – Prototipo desarrollado en el Departamento de Mecatrónica y Automatización del Instituto Tecnológico y de Estudios Superiores de Monterrey campus Monterrey. 26.
(49) El diseño de implementación se ha dividido en tres áreas:. Diseño Mecánico.- Todo aquello que esté relacionado con la estructura mecánica; la selección de los actuadores, sistemas de transmisión y demás componentes como la construcción de las articulaciones, sensores que tendrá el robot manipulador delta. Diseño Electrónico.- Todo aquello que esté relacionado con la circuitería electrónica que permita el movimiento de los actuadores, comunicación entre dispositivos para el control del manipulador y demás componentes que permita el buen funcionamiento del robot. Comunicación.- Todo aquello relacionado con los protocolos de comunicación entre la computadora y el microcontrolador. Además está relacionado con la programación de las funciones de la interfaz humano-maquina y del microcontrolador. Al término de esta tesis, se ha rediseñado la estructura mecánica que logre el movimiento del robot así también como su sensado; se ha implementado un circuito electrónico que permite la comunicación entre la computadora y el microcontrolador; se ha realizado una interfaz humano-máquina para operar el manipulador paralelo tipo delta y se ha realizado un esquema de control difuso para cada una de las tres articulaciones.. 3.2. Diseño Mecánico Debido a que este trabajo es una continuación de [3] y [11] se partió de la estructura mecánica usada en ambos trabajos mostrada en la Figura 3-2; en ésta se muestra la base fija y móvil del robot, los tres brazos de la configuración Delta y los tres motores acoplados a un sistema de reducción siendo una banda la forma de acoplamiento. Esta estructura tiene los componentes mecánicos básicos para la configuración Delta, pero debido a las condiciones adversas que ha tenido a lo largo del tiempo sus articulaciones han sufrido desajustes dando origen a “juegos” mecánicos. Estos “juegos” son perjudiciales para el control por lo que en la segunda parte de esta sección se amplían los detalles de las 27.
(50) Capítulo 3: Desarrollo de un Manipulador Delta implementaciones mecánicas realizadas en el prototipo para disminuir estas fallas en los diversos acoplamientos.. a)Vista lateral. b) Vista superior. Figura 3-2 – Estructura Inicial del prototipo. 3.2.1. Diseño original del prototipo En esta sección se describirá la estructura mecánica de la que se partió para este trabajo de tesis. Así mismo se mostrarán las características más importantes de cada uno de los elementos que la componen. La estructura que sostiene a la base fija del prototipo es un perfil PTR cuadrado de acero de 50 mm y tiene una altura de 1200 mm (Figura 3.2). La base fija que sostiene los motores los cuales forman un triángulo equilátero de 320 mm de lado. Estos se encuentran a una distancia de 150 mm con respecto al centro de la misma.. 28.
(51) a). b). Figura 3-3 - Vista de a) mecanismo de tracción y b) Union entre antebrazo y brazo. Los brazos y antebrazos están hechos con barras tubulares de aluminio de 12.7mm (1 2’’) y 9.525mm (3 8’’) de diámetro. La longitud de total de cada brazo es de 200 mm, mientras que la longitud total de cada antebrazo es de 400 mm. La unión entre estos dos elementos se realiza mediante dos rotulas de 9.525 mm (3 8’’) con rosca fina de 24 hilos. En uno de los extremos de los antebrazos se encuentra la base móvil donde se acopla el efector final del robot manipulador Delta. La distancia entre el centro y esta es de 25 mm. En la Figura 3.4 se muestra tanto la base móvil, su unión con el antebrazo y el efector final. Los motores de corriente directa utilizados para mover cada una de las articulaciones del robot delta utilizan 24 VCD de alimentación, soportan una corriente máxima de 2 A y una potencia promedio de 22 W. Su velocidad máxima es de 3200 rpm. Además, estos motores, se encuentran acoplados a los brazos del robot por un tren de reducción 200:1 y una banda que transmite el movimiento a las articulaciones (ver Figura 3.3a).. 29.
(52) Capítulo 3: Desarrollo de un Manipulador Delta. a) Vista lateral. b) Vista superior. Figura 3-4 – Base movil del manipulador. 3.2.2. Rediseño final del prototipo Si no se tiene un buen diseño mecánico de cualquier proceso físico, el desarrollo de casi cualquier tipo de control resultaría infructuoso debido a que la planta en sí sería inestable. Es por esto que, antes de intentar la sintonía de cualquier tipo de control, se realizaron los ajustes mecánicos pertinentes para reducir en gran parte, los desajustes mecánicos presentes del prototipo original. Se colocaron soportes de aluminio para cada uno de los elementos de transmisión de 3 mm de espesor los cuales eliminan prácticamente el desajuste mecánico existente con la base fija (Figura 3-5a). Para la unión del brazo con el mecanismo de transmisión de movimiento se agregaron dos arandelas de acero de 2.5 mm de espesor los cuales redujeron considerablemente el “juego” pero sin eliminarlo por completo (Figura 3-5b).. 30.
(53) a) Soporte de transmisión. b) Arandelas en el brazo. Figura 3-5 – Ajustes mecánicos implementados en el prototipo. Se han colocado tres sensores de desplazamiento con el fin de llevar a cabo la metodología de trilateración explicada en el capítulo dos de este trabajo de tesis (Figura 3-6). Estos tres sensores han sido construidos en una estructura de acrílico y tienen un hilo de nylon el cual se conecta en el efector final y su longitud varía según sea el desplazamiento del mismo. Este movimiento se transmite a un potenciómetro de precisión de diez vueltas de 10 kΩ que entrega un voltaje proporcional a la distancia que la base móvil recorre. Se han montado sobre la base fija formando un triángulo equilátero como se muestra en la Figuras 3.5 y el hilo de cada sensor se pivotea en dos lugares fijos, tal como se mostró en el capítulo dos, de la estructura ampliando este triángulo a uno de 163 mm de lado con el fin de lograr una mejor sensibilidad al momento de aplicar el método de trilateración.. 31.
(54) Capítulo 3: Desarrollo de un Manipulador Delta. a) Vista superior. b) Vista lateral. Figura 3-6 – Vista de los sensores de desplazamiento instalados en la base fija del manipulador. Figura 3-7 – Estructura final del prototipo. Como se puede apreciar en la Figura 3-7 en la parte superior de la base fija se colocó una cubierta de acrílico con el fin de no dejar expuestos los elementos electrónicos y sensores que se montaron en el prototipo del robot Delta. 32.
(55) 3.3. Diseño Electrónico Respecto al diseño electrónico, se identifican dos elementos principales: -. Microcontrolador ATmega8 de Atmel. -. 3 circuitos de potencia GENCODRIVE 6320. Figura 3-8 - Esquemático de la conexión electrónica del microcontrolador. Cada motor se acciona a través de una interfaz de potencia encapsulado GENCODRIVE 6320 el cual es básicamente un puente H de 5 A y 55VCD diseñado para aplicaciones de control de movimiento en motores de corriente directa. Este puente H recibe un tren de pulsos de 5 VCD para transmitir de igual forma un ancho de pulso modulable a 24 VCD. Además es utilizado un microcontrolador ATmega8 de Atmel donde se encuentra el programa responsable de la comunicación entre la interfaz de potencia del robot y la Interfaz Humano-Máquina (IHM) desarrollado en el software de programación grafica LabView® de National Instruments. También se lleva a cabo una conversión de datos para las señales que salgan del microcontrolador puedan ser interpretados por el circuito de 33.
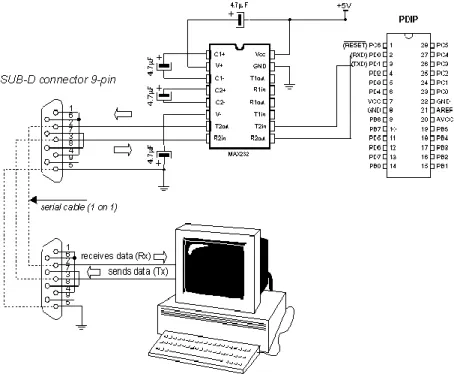
(56) Capítulo 3: Desarrollo de un Manipulador Delta potencia. Adicionalmente, los tres sensores de posición son conectados a los pines de conversión analógica-digital del microcontrolador (ver Figura 3.6), no sin antes pasar por una etapa de filtrado que consta de un circuito pasivo RC. Como se explicó anteriormente, el circuito de potencia recibe un tren de pulsos para mandar una señal de potencia hacia los motores, este tren de pulsos es enviado por el microcontrolador pasando por resistencias de 100 Ohms tal como se muestra en la Figura 3-6. Como son tres los motores que se deben mover en el Robot Delta, solo las resistencias que están conectadas a los pines 12, 14 y 16 del microcontrolador son las que llevan esos trenes de pulsos. Las resistencias que se encuentran en los pines 11, 13 y 15 del microcontrolador son las que determinan si el motor se moverá en sentido a favor o en contra de las manecillas del reloj. Debido a que se ha desarrollado una interfaz en una computadora se utiliza el protocolo de comunicación RS232 para interactuar entre el microcontrolador y un ordenador por lo que se incluye un buffer para este proceso, el integrado max232 (Figura 3-7).. Figura 3-9 – Esquemático electrónico para el protocolo de comunicación RS232. 34.
(57) Figura 3-10 – Esquematico del encapsulado GENCODRIVER 6320. En la Figura 3-10 se muesra el esquematico del encapsulado GENCODRIVER 6320 usado para convertir el tren de pulsos enviado por el microcontrolado la señal recibida del microcontrolador en una señal de ancho modulable de potencia hacia cada motor de cada articulación.. 3.4. Comunicación Esta área es la que lleva a cabo el intercambio de datos y señales entre el circuito de potencia, los sensores, el microcontrolador y la computadora a través de una Interfaz Humano-Máquina (IHM). En este sistema el microcontrolador actúa como un convertidor y adaptador de señales, y es en la interfaz hecha en la plataforma LabView ® donde se realiza el control general del robot.. 3.4.1. Interfaz Humano-Máquina Para la interaccion con el robot manipulador tipo delta se diseñó una interfaz sobre la plataforma LabView®. Esta provee al usuario la capacidad de mover el robot, observar las trayectorias y proporcionar la sintonía del control difuso aplicado a cada una de las articulaciones del robot. 35.
(58) Capítulo 3: Desarrollo de un Manipulador Delta. Figura 3-11 – IHM diseñada para el control del manipulador. La interfaz cuenta con un periodo de muestreo ajustable. En cada intervalo se realiza el control de las tres posiciones deseadas (x, y, z) mediante lógica difusa y se mandan los valores de la manipulación al microcontrolador y éste a su vez a cada uno de los circuitos de potencia de cada brazo. Por otra parte se reciben los paquetes del microcontrolador con los valores de los tres sensores y en la programación de la interfaz se calculan las tanto las posicones cartesianas (x, y, z) como las posiciones angulares (θ11, θ12, θ13) de cada una de las articulaciones y cada medición se muestra en la parte inferior de la interfaz (ver Figura 3.7a). En la parte inferior izquierda se encuentra el interruptor principal para la conexión del microcontrolador con la IHM mediante el protocolo de comunicación RS232 y se muestra el estado de esta conexión. Antes de presionar el botón se tuvo que haber configurado el número de puerto en el cual está conectado físicamente el microcontrolador (ver Figura 3.7c). En la parte inferior central se encuentra la posición espacial de referencia que puede ser cambiada en cualquier momento ya que, como se mencionó anteriormente, el esquema de control difuso estará calculando los valores de manipulación de cada una de las articulaciones para llegar a la posición espacial deseada. La posición actual del punto OEF se gráfica en la parte superior para los ejes x, y, z. 36.
(59) Por otro lado, con el fin de dar de alta la sintonía del control difuso, es necesario seleccionar el archivo con extensión *.fc previamente creado para cada articulación (ver Figura 3.7b). El procedimiento para crear un archivo *.fc se incluye en el apéndice A.. a). b). c) Figura 3-12 – Detalle de la IHM. En la sección de programación del software LabView®, se incluyeron los algoritmos para la implementación del esquema de control, la metodología de trilateración, el análisis de la cinemática inversa y comunicación con el microcontrolador. En la Figura 3-12 se muestra el pseudocódigo utilizado para realizar el control de la posición del efector final en el manipulador Delta.. 37.
(60) Capítulo 3: Desarrollo de un Manipulador Delta. Figura 3-13 – Pseudocódigo implementado en LabView®. 3.4.2. Microcontrolador El microcontrolador que se seleccionó para la adquisición y procesamiento de datos fue el ATmega8 de Atmel el cual incorpora seis canales de conversión analógica digital (ADC), así como puertos de comunicaciones SPI (Serial Peripheral Interface) y UART (Universal Asynchronous Receiver-Transmiter). Las funciones que lleva a cabo el microcontrolador son las siguientes: . Transmisión a la IHM. Enviar los valores actuales de cada uno de los sensores para realizar la metodología de trilateración. 38.
(61) . Recepción de Manipulación. Recibir los valores numéricos de las manipulaciones calculadas por el control difuso de cada uno de las tres articulaciones. . Conversión de datos. Convertir los valores numéricos de las manipulaciones a señales digitales para los circuitos de potencia de cada una de las articulaciones.. . Lectura de Sensores. Mediante tres canales de conversión analógica digital se realiza la lectura actual de cada sensor de desplazamiento para poder transmitir estos datos a la IHM.. Figura 3-14 – Esquemático general de la electrónica y comunicación del manipulador Delta. 3.5. Resumen En este capítulo se ha descrito de forma general el desarrollo del prototipo en el cual se implementó un esquema de control difuso. Se muestra la forma en que se instalaron físicamente los sensores para la metodología de trilateración, esto es muy importante debido a que si se incurre en algún error de posicionamiento o imprecisión física se tendrían que reestructurar las ecuaciones que dan origen a la misma. Así también se describe el algoritmo del programa implementado en LabView® y los componentes electrónicos usados para el control manipulador Delta basado en lógica difusa.. 39.
(62) Capítulo 3: Desarrollo de un Manipulador Delta. 40.
(63) 4.. Diseño e Implementación de un controlador Difuso en un Manipulador Delta. En el presente capítulo se da la introducción a control difuso y las bases teóricas que lo fundamentan así como el esquema de control difuso implementado en el robot manipulador Delta. 41.
(64) Capítulo 4: Diseño e Implementación de un Controlador Difuso en un Manipulador Delta. 4.1. Introducción. Con el fin de controlar la posición del efector final del manipulador se ha diseñado una estrategia de control inteligente conocida como control difuso. Dicha estrategia fue desarrollada en la década de los 60’s por Lofti Zadeh [19] con el fin de emular el conocimiento humano sobre un proceso a partir de una teoría denominada teoría de conjuntos difusos. En este capítulo se expondrá la estrategia de control y su estructuración. Se hará una introducción a los principales conceptos del control difuso y a la lógica detrás de este. Se analizarán los pasos para diseñar un controlador difuso.. 4.2. Control Difuso. El Control difuso provee una metodología formal para representar, manipular y aplicar el conocimiento heurístico (tanteo ó reglas) de un ser humano acerca de cómo controlar un sistema. Es decir, las variables de entradas y de salidas se procesan cualitativamente en vez de hacerlas cuantitativamente, por ejemplo, normal, frío, muy frío, extremadamente frío. De esta forma, este tipo de control utiliza un conjunto de términos lingüísticas como acciones de control sobre el proceso que satisfagan las necesidades y requerimientos del sistema.. Figura 4-1 – Diagrama de bloques de un esquema de control difuso. 42.
Figure




+7





Outline
Documento similar
1. LAS GARANTÍAS CONSTITUCIONALES.—2. C) La reforma constitucional de 1994. D) Las tres etapas del amparo argentino. F) Las vías previas al amparo. H) La acción es judicial en
El contar con el financiamiento institucional a través de las cátedras ha significado para los grupos de profesores, el poder centrarse en estudios sobre áreas de interés
Una vez hecho esto, se realiza una espera, leyendo el registro de salida del coprocesador para el control de qué está haciendo el procesador en este momento, a la espera que nos
la cual, introducida en la función kemel de densidad espectral estimada posibilitará que el estimador resultante de S, sea una matriz semidefinida positiva. Esta
Por PEDRO A. EUROPEIZACIÓN DEL DERECHO PRIVADO. Re- laciones entre el Derecho privado y el ordenamiento comunitario. Ca- racterización del Derecho privado comunitario. A) Mecanismos
Primeros ecos de la Revolución griega en España: Alberto Lista y el filohelenismo liberal conservador español 369 Dimitris Miguel Morfakidis Motos.. Palabras de clausura
Volviendo a la jurisprudencia del Tribunal de Justicia, conviene recor- dar que, con el tiempo, este órgano se vio en la necesidad de determinar si los actos de los Estados
