Control de vehículo aéreo autónomo basado en modelo dinámico
113
0
0
Texto completo
(2) Universidad d Centra al “Marta Abreu” de Las Villas V Fac cultad de e Ingenie ería Elécttrica Deparrtamento de d Autom mática y Siistemas Computac C cionales. Contro ol de vehículo aérreo autónomo ba asado en modelo dinámico Tesis prese entada en n opción al grado o de Más ster en Automátic A ca y Sis stemas Infformáticos s. Au utor: Ing. Luis Maria ano Pined da Bombin no ng. Eléctric ca, UCLV Proff. Instructor Dpto. Automática, Facultad In e-maill: [email protected] C. Luis He ernández Santana S Tutores: DrC Prof. Titular Dp pto. Automá ática, Facu ultad Ing. Eléctrica, E UCLV e-mail: luishs@ @uclv.edu.cu rC. Boris Luis L Martin nez Jimén nez Dr Proff. Titular Dp pto. Autom mática, Facu ultad Ing. Eléctrica, UCLV U e-mail: boris@ @uclv.edu.c cu. Santa Clara 2011.
(3) Pensamiento. No te apenes de tus errores honestos. Son absolutamente necesarios para tu progreso. El hombre que trata sinceramente de hacer las cosas lo mejor posible y que sin embargo incurre en errores sucesivos no debe preocuparse demasiado siempre que sea capaz de conservar su cabeza fría y su corazón ardiente. ¡Ese hombre está reservado para grandes cosas! Uno de los peores errores que puede cometer el hombre durante su viaje por la tierra es no equivocarse nunca. El individuo que nunca llega a verse en el camino erróneo es invariable aquel que nunca cumplirá nada importante. Charles R. Stuart..
(4) Dedicatoria A mis padres que tanto me han guiado en la vida. A mis abuelos que son ejemplos de esfuerzo y perseverancia en la vida. En especial a mi abuelo Mariano que a pesar de ya no estar físicamente junto a mí, siempre lo llevo conmigo. A mi hermana que siempre esta dispuesta a ayudarme cundo lo necesito. A mi esposa Sidneyis que me apoya en todas mis locuras..
(5) Agradecimientos A mi familia por confiar siempre en mí. A Luis Hernández por saber obtener lo mejor de cada uno, en algunos casos ni la misma persona piensa que lo puede logar. A Boris por la ayuda brindada. A todos los muchachos del 117: Yidier, Oscar, Valeriano, Urquijo, Delvis, Carlitos, Richar, Pablo José, Diamir, a todos lo de GARP que formamos un grupo de punta. A los profesores que todos los días no enseñan a ser mejores personas. Al Calvin por ser un excelente alumno, que juntos logramos poner a punto todo el sistema. A todos aquellos que de una forma u otra me han ayudado en la realización de esta tesis..
(6) Resumen Los vehículos aéreos autónomos han sido un área de investigación a la que se ha prestado gran interés por muchos años. Actualmente, prestigiosas universidades y centros de investigación, tanto privados como públicos, se encuentran investigando y desarrollando vehículos aéreos autónomos. Dada las disímiles aplicaciones que poseen los aviones autónomos es de interés del centro Mecatronics y del Grupo de Automatización Robótica y Percepción (GARP) el desarrollo e implementación de autopilotos para estos vehículos. Estos autopilotos se implementan utilizando tecnología de bajo costo. El siguiente trabajo aborda los pasos a seguir para obtener los lazos de control de estabilidad, rumbo y altura en estos aviones. Estos pasos incluyen el modelado analítico e identificación experimental, volición del modelo analítico obtenido y la sintonía de reguladores basado en modelo. Específicamente, se obtienen los modelos de los aviones N606LS y CV10CT, se realizan pruebas experimentales para validar dichos modelos y se sintonizan reguladores convencionales basados en los modelos obtenidos. Mediante pruebas reales se ponen a punto los controladores previamente sintonizados para el avión N606LS y quedan validados, de forma práctica, los pasos a seguir para el desarrollo. de. vehículos. aéreos. autónomos. sintonizados a partir de modelos analíticos.. con. reguladores. clásicos.
(7) Índice Introducción .......................................................................................... 1 1.. Revisión Bibliográfica ........................................................................ 6 1.1.. Desarrollo de los UAV en el mundo ............................................. 6. 1.2.. Aplicaciones: ........................................................................... 7. 1.3.. Arquitectura general del sistema. ..............................................10. 1.3.1.. Estación en tierra ..............................................................11. 1.3.2.. Estación a bordo ................................................................11. 1.4.. 2.. Modelo matemático .................................................................13. 1.4.1.. Fuerzas que actúan en el avión ............................................13. 1.4.2.. Partes del avión. Superficies de control. ................................15. 1.4.3.. Modelado ..........................................................................16. 1.5.. Identificación de UAV ...............................................................17. 1.6.. Algoritmos de control ...............................................................18. 1.7.. Resultados de la revisión bibliográfica ........................................19. Modelado Analítico ..........................................................................22 2.1.. Introducción ...........................................................................22. 2.2.. Sistema de Coordenada: ..........................................................23. 2.2.1.. Referencia tierra Xe Ye Ze ..................................................23. 2.2.2.. Sistema de coordenadas inercial Xi Yi Zi................................23. 2.2.3.. Sistemas de Cordenadas de Navegación Xn Yn Zn ..................24. 2.2.4.. Sistemas de ejes del cuerpo Xb Yb Zb...................................24. 2.2.5.. Sistema de Estabilidad Xs Ys Zs ...........................................24. 2.3.. Definición de Ángulos ..............................................................25. 2.4.. Ecuaciones no lineales .............................................................26.
(8) 2.4.1.. Ecuación de fuerza .............................................................27. 2.4.2.. Ecuaciones de momento angular ..........................................28. 2.5.. 2.5.1.. Ecuaciones de fuerza ..........................................................29. 2.5.2.. Ecuaciones de momento angular ..........................................30. 2.6.. Coeficientes Aerodinámicos ......................................................31. 2.7.. Movimiento Longitudinal...........................................................32. 2.7.1.. Estimación de las fuerzas generalizadas y los torques .............32. 2.7.2.. Descripción en espacio de estado del momento longitudinal .....35. 2.7.3.. Modelo longitudinal ............................................................37. 2.8.. Movimiento Lateral ..................................................................38. 2.8.1.. Estimación de generalización de las fuerzas y torques .............39. 2.8.2.. Descripción en espacio de estado del movimiento lateral .........40. 2.8.3.. Modelo Lateral...................................................................43. 2.9.. Identificación experimental .......................................................43. 2.9.1.. Identificación experimental del canal longitudinal ...................48. 2.9.2.. Identificación experimental del canal lateral ..........................50. 2.10. 3.. Linealización ...........................................................................29. Conclusiones finales del capítulo ................................................51. Sintonía de controladores. ................................................................53 3.1.. Introducción ...........................................................................53. 3.2.. Control de estabilidad. .............................................................53. 3.2.1.. Requerimientos para la calidad del vuelo. ..............................54. 3.2.2.. Características de vuelo ......................................................55. 3.3.. Diseño de controladores ...........................................................56. 3.3.1.. Diseño de control canal longitudinal......................................56.
(9) 3.3.2. 3.4. 4.. Diseño de control canal lateral .............................................62. Conclusiones finales del capítulo ................................................67. Resultados prácticos obtenidos. ........................................................69 4.1.. Introducción ...........................................................................69. 4.2.. Modelado matemático. .............................................................69. 4.3.. Sintonía de controladores .........................................................70. 4.3.1.. Ajuste de regulador Canal Longitudinal .................................70. 4.3.2.. Ajuste de regulador Canal Lateral.........................................72. 4.4.. Vuelo real ..............................................................................73. 4.4.1.. Puesta a punto control de estabilidad....................................74. 4.4.2.. Puesta a punto de rumbo ....................................................76. 4.5.. Conclusiones finales del capítulo ................................................79. Conclusiones ........................................................................................80 Recomendaciones .................................................................................81 Bibliografía ..........................................................................................82 ANEXOS ..............................................................................................85 ANEXO I Tabla de constantes y variables. ..............................................85 ANEXO II Parámetros de ecuaciones. ....................................................90.
(10) INTRODUCCIÓN. Introducción El futuro de la aviación abarca tres ramas principales: los satélites, los aviones y los UAV (Unmanned Aerial Vehicles), tomado literalmente, el término podría describir un amplio rango de dispositivos capaces de operar en el espacio aéreo que van desde cometas, globos o dirigibles hasta aviones radio controlados, pasando por los misiles o aeronaves prácticamente autónomas operativamente hablando (Asensio, Pérez et al. 2008). Los aviones de pequeño porte no tripulados (UAV) destacan entre los aviones por su estabilidad, menor complejidad y considerable ahorro en comparación con los vehículos convencionales en cuanto a costo de la aeronave, el no poner al piloto en peligro y el ahorro de combustible. Poseen una variada gama de aplicaciones que van desde la inspección de infraestructuras,. líneas. eléctricas,. oleoductos. y. gaseoductos. hasta. el. levantamiento topográfico para la elaboración de mapas y toma de fotografías aéreas, además de ser utilizados en supervisión de tráfico, vigilancia de fronteras y búsqueda de personas desaparecidas en fenómenos naturales (Carmenate 2009). Los vehículos aéreos autónomos han sido un área de investigación a la que se ha prestado gran interés por muchos años. Actualmente las más prestigiosas universidades y centros de investigación, tanto privados como públicos, se encuentran investigando y desarrollando vehículos aéreos autónomos. Estas plataformas han sido utilizadas para investigar en áreas que van desde el control. no. lineal,. control. multivariable,. navegación,. planificación. de. trayectorias hasta la detección y seguimiento visual de objetivos (Alvarez 2006). Otra de las ventajas es la seguridad, debido a que los pilotos controlan el avión desde tierra, en algunos casos todo el vuelo y en otros solo el despegue y 1.
(11) INTRODUCCIÓN. aterrizaje, ya que todo el trayecto se realiza pre programado con un sistema de navegación asistido GPS (Global Positioning System) y. la IMU (Inertial. Moment Unit); en algunos casos existe el uso de cámaras de visión (Alvarez 2006) para el reconocimiento del terreno. En el control de estabilidad existen un gran número de artículos relacionados con el tema como son (Córdova 2007), (Ramírez and Vélez 2007), (AlSwailem 2004), (Graversen, Krogh et al. 2001), (Andersen, Bak et al. 2004), etc. La planificación de trayectoria (Pathplanning) es la parte del autopiloto donde se unen navegación y la misión deseada, este algoritmo determina hacia donde va el UAV y en que momento debe cambiar su rumbo para cumplir con la trayectoria planificada (Grankvist 2006). En Cuba su desarrollo de los vehículos autónomos aún es escaso, pero instituciones como GEOCUBA, facultada para la elaboración de mapas de relieve; CEMPALAB, encargada de investigaciones en agricultura de precisión y CEDAI nacional, han mostrado interés en las ventajas que los pequeños aviones no tripulados pueden brindar. En los últimos años el Grupo de Automatización Robótica y Percepción (GARP) ha acumulado un número importante de investigaciones dirigidas al diseño e implementación. de. vehículos. autónomos.. Las. investigaciones. ocupan. diferentes aéreas que incluyen modelado de vehículos subacuáticos (Abreu 2010), aéreos autónomos en aviones (Pineda 2008; Carmenate 2009) y minihelicóptero. (Avila. 2008).. Además. se. han. realizado. trabajos. en. identificación experimental de vehículos aéreos (Martínez, Pineda et al. 2011), desarrollo de hardware para vehículos autónomos (Martínez 2005; Guerra 2010). A partir de una solicitud del Centro de Investigaciones Mecatronics, el Grupo de Automatización Robótica y Percepción (GARP), en el marco del proyecto VLIR y del proyecto ramal de la Tarea Triunfo tiene como objetivo el desarrollo de un autopiloto para un avión de pequeño porte. 2.
(12) INTRODUCCIÓN. El control automático es la función principal de los autopilotos y requiere de un modelo. que. describa. fielmente. la. dinámica. del. avión.. El. Grupo. de. Automatización Robótica y Percepción (GARP) no cuenta en la actualidad con un método. que permita obtener un modelo matemático del avión con las. condiciones con que cuenta y pocos recursos que permitan realizar grandes y costosas. pruebas,. lo. cual. es. necesario. para. el. posterior. diseño. e. implementación de las estrategias de control. Tampoco se tiene identificada una estrategia de control que permita el cumplimiento de misiones no tripuladas así como el seguimiento de una trayectoria predeterminada, manteniendo una altura deseada. Analizando esto se propone desarrollar una secuencia de pasos la cual abarcará el modelado dinámico del avión, la identificación experimental del mismo y la síntesis de estrategias de control de estabilidad y rumbo basado en modelo. Por tanto el objetivo general propuesto para este trabajo es: •. Implementar estrategias de control convencionales basados en modelo para la estabilidad y rumbo de UAVs.. Como objetivos específicos se establecen: •. Estudiar técnicas de modelado analítico de vehículos aéreos.. •. Estudiar estrategias de control implementadas a nivel mundial para la navegación de vehículos aéreos.. •. Obtener el modelo analítico que describa lo más exacto posible el comportamiento dinámico del sistema.. •. Validar los modelos matemáticos obtenidos mediante identificación experimental.. •. Implementar una estrategia de control basada modelo y validar su desempeño mediante pruebas experimentales.. 3.
(13) INTRODUCCIÓN. Interrogantes Científicas ¿Qué modelo matemático describe los UAV? ¿Cuáles son las variantes de control más utilizadas en los UAVs? ¿De qué manera lograr que el avión realice un seguimiento de puntos? Tareas de investigación •. Revisión de la bibliografía con el fin de obtener los principales métodos para la obtención del modelo matemático del vehículo.. •. Análisis crítico de las arquitecturas implementadas en UAV referidas en la bibliografía.. •. Selección de una arquitectura de control y sistema de seguimiento de rumbo.. •. Implementación dicho algoritmo de control basado en modelo.. •. Validación del algoritmo implementado.. •. Realización de pruebas experimentales.. El resultado que se pretende con este trabajo es la obtención de una secuencia de pasos para el diseño de autopilotos en aviones de pequeño porte como una solución de bajo costo. Estos incluyen el modelado analítico de aviones de pequeño porte, la identificación experimental para validar el modelado analítico y el ajuste de los controladores basado en los modelos obtenidos. Con la ejecución del proyecto se dan soluciones a problemáticas modernas vinculadas con la adquisición de un software o hardware de gran complejidad y valor, cuya adquisición no es viable actualmente en nuestro país; logrando una independencia. tecnológica. en. esta. línea. de. investigación. de. países. desarrollados. Con la creación de un autopiloto que realice vuelo autónomo se logrará un gran ahorro para el país, pues llevaría a cabo misiones que en la actualidad 4.
(14) INTRODUCCIÓN. son realizadas por vehículos aéreos de gran tamaño; además se evitará el peligro al que están expuestos los pilotos. El impacto medioambiental será considerable por la reducción de consumo de combustible y por tanto de desechos de la combustión. Organización del informe El informe está dividido en: introducción, cuatro capítulos, conclusiones, recomendaciones, referencias bibliográficas y anexos. Los capítulos están organizados de la siguiente manera: En el capítulo uno se realiza un análisis de la bibliografía consultada, revisando los métodos de obtención de modelos de aviones, las principales estrategias de control basadas en modelo y analizando su aplicabilidad en este proyecto. Finalmente se definen los pasos a seguir para la obtención del autopiloto. En el capítulo dos se analizan los pasos a seguir para la obtención del modelo matemático de un avión pequeño, estos pasos son utilizados para la obtención del modelo del avión CV10CT del centro Mecatronics y el N606LS del Centro de Investigaciones. GARP,. además. la. validación. de. los. mismo. mediante. identificación experimental, lo cual permite afirmar que el modelo es fiable a utilizar para el diseño de las estrategias de control. En el capítulo tres se realiza un análisis de los requisitos aeronáuticos para lograr un eficiente control del vuelo. Se diseña una estrategia de control convencional basados en modelo para el control de estabilidad y rumbo del avión. En el capítulo cuatro se explican los resultados experimentales obtenidos con el avión N606LS perteneciente a GARP y las estrategias de control basadas en modelo son validadas de forma experimental, tanto los lazos de estabilidad como rumbo.. 5.
(15) REVISIÓN BIBLIOGRÁFICA. 1. Revisión Bibliográfica 1.1. Desarrollo de los UAV en el mundo En los vehículos aéreos no tripulados el control es completamente autónomo. Este concepto del UAV tiene varias décadas, pero es ahora con el desarrollo de los micro-controladores y de los sensores inerciales de tecnología de estado sólido, que es posible fabricar estas máquinas a un precio asequible, siendo un área importante de la investigación aeronáutica y aeroespacial durante la última década(Grankvist 2006; Adiprawita, Ahmad et al. 2007; Woo, Son et al. 2007; Pajares, Ruz et al. 2008; Rodrِíguez, Santana et al. 2010). A diferencia de la conducción por carretera, en el aire es completamente viable automatizar el control. Las ventajas de un vehículo sin piloto humano son evidentes: gran flexibilidad en cuanto a dimensiones de la aeronave, capacidad de asumir riesgos que con un piloto humano serían inaceptables y consecuentemente una reducción de los costos. El diseño de estos vehículos aéreo de pequeño porte se considera un gran reto debido principalmente a las restricciones del peso de sus componentes y de su carga. Desde el punto de vista aerodinámico, se debe tener un cuidado muy especial en el diseño de su geometría y configuración, particularmente la geometría de la sección transversal de las superficies de sustentación o perfiles aerodinámicos. Cualquier mejora aerodinámica, por pequeña que esta sea, se verá reflejada en un incremento en rendimiento para un UAV o MAV (Micro Aerial Vehicles). Un área de interés de optimización aerodinámica es la minimización de la resistencia al avance del vehículo, la cual se puede traducir en un incremento en su autonomía o una mayor carga de peso (Arias-Montaño 2007). En los últimos años una gran cantidad de universidades y centros de investigación, tanto privados como públicos a nivel mundial, se encuentran investigando y desarrollando vehículos aéreos autónomos, destacándose por 6.
(16) REVISIÓN BIBLIOGRÁFICA. su maniobrabilidad los helicópteros autónomos (Vélez and Álvarez 2003; Córdova 2007) y los aviones autónomos (Graversen, Krogh et al. 2001; Andersen, Bak et al. 2004; Fossen 2011). Estas plataformas han sido utilizadas para investigar áreas que van desde el control no lineal (AlSwailem 2004), control inteligente (Abuleme 2000) , control multivariable (Andersen, Bak et al. 2004), navegación (Torroella 2004), planificación de trayectorias (Pajares, Ruz et al. 2008), hasta la detección y seguimiento visual de objetivos (Alvarez 2006; Woo, Son et al. 2007). Estas plataformas presentan propiedades que las hacen muy adecuadas para tareas de inspección y monitorización. 1.2. Aplicaciones: Las aplicaciones son infinitas, es sencillo hacer una larga lista de aplicaciones: •. Investigación, educación y formación - Plataforma ideal y de importante contenido. para. infinidad. de. desarrollos. y. líneas. de. investigación. relacionadas con el control y dinámica del vuelo, la navegación aérea, experimentación a baja altitud (Graversen, Krogh et al. 2001; Andersen, Bak et al. 2004). •. Control de tráfico por carretera.. •. Policial, vigilancia policial ciudadana - Sobrevuelo a media altura y potentes cámaras motorizadas.. •. Vigilancia forestal y prevención de incendios. (Merino, Ollero et al. 2006). •. Vigilancia fronteriza y costera. (López 2008). •. Fotografía aérea - agrícola, inmobiliario.. •. Filmación de video aéreo - Productoras de TV, no hay que negar que sería un sector interesado y que mueve mucho dinero en todo el mundo.. 7.
(17) REVISIÓN BIBLIOGRÁFICA. •. Desastres, emergencias, búsquedas de personas - A diferencia de la aviación general, la aviación no tripulada tiene la propiedad de volar durante largos períodos de tiempo a baja velocidad, por lo que el UAV no deja de vigilar la zona durante días, por ejemplo una búsqueda de personas desaparecidas podría permanecer día y noche, mediante cámaras de infrarrojos localizándolas, lo cual multiplicaría la eficacia de la exploración.. •. Telecomunicaciones - Seudo-satélite de comunicaciones de emergencia o de uso puntual (Volando a mínima velocidad puede permanecer días en el aire. haciendo. círculos. sobre. una. misma. posición. a. gran. altitud. (Barrientos, Cerro et al. 2007). •. Agrícolas - fumigaciones, siembras.. •. Publicitario - Llevando pancartas o escribiendo mensajes con humo.. •. Humanitario - Transporte de material humanitario a zonas de alto riesgo.. •. Meteorológica - Su uso en estudios atmosféricos y contaminación del medio ambiente en las ciudades.. En Cuba el desarrollo en UAV es bastante escaso. El grupo de investigación GARP (Grupo de Automática, Robótica y Percepción) desde el 2008 se a dado a la tarea de investigar en campos relacionados con vehículos autónomos. Los resultados obtenidos están reflejados en tres tesis de ingeniería. En las cuales se plantean los distintos problemas a los que se han enfrentado en el grupo para establecer una lógica para el modelado matemático de estos vehículos aéreos de seis grados de libertad (Pineda 2008). En segundo lugar son plantas extremadamente complejas para controlarlas tanto en el control de estabilidad, como en el control de rumbo. De las investigaciones realizadas para la elaboración del autopiloto se ha llagado a la conclusión: lo primero es que todo tiene que ser diseñado y 8.
(18) REVISIÓN BIBLIOGRÁFICA. desarrollado por nosotros, para no tener dependencia de ningún fabricante y poseer el dominio de la implementación, estando el trabajo dividido en varias partes: •. Estación de supervisión de tierra.. •. Programación de los sensores en el avión ejemplo IMU y GPS.. •. Programación de las bases de datos.. •. Programación. del. micro-controlador. con. la. implementación. de. las. estrategias de control. •. Recolección de todos los parámetros físicos del avión.. •. Obtención del modelo matemático del avión de forma analítica y de forma experimental.. •. Diseño del controlador a partir del modelo matemático obtenido.. En la figura 1.1 se muestran los dos aviones en los cuales se implementarán los autopilotos. Dichos aviones presentan características diferentes en cuanto a su peso y dimensiones, a pesar de esto se les puede tratar como plantas semejantes ya que aerodinámicamente presentan características similares como son: son aviones subsónicos, de peso relativamente pequeño comparado con aviones que transportan personas, etc.. 9.
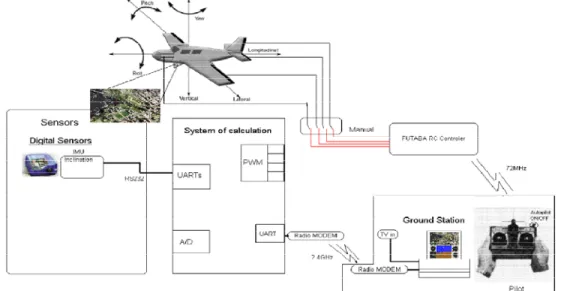
(19) REVISIÓN BIBLIOGRÁFICA. a) N606LS. b) CV10CT. Figura 1.1: Aviones en los cuales se implementarán los pilotos automáticos.. 1.3. Arquitectura general del sistema. Un Vehículo Aéreo No Tripulado es un vehículo capaz de volar sin un humano a bordo. Este puede ser operado manualmente desde una estación en tierra o puede ser autónomo en el sentido de ser capaz de cumplir diferentes tareas sin tener interacción humana empleando sistemas de control, aunque el despegue y aterrizaje del avión generalmente se realizan de forma manual. En esta última área es que se enmarca esta investigación, cuyo objetivo es desarrollar un autopiloto de bajo costo para pequeños aviones no tripulados con el fin de realizar tareas de vigilancia y monitoreo. Para poder desarrollar un autopiloto es necesario contar con una estación a bordo, la cual será la encargada de procesar los datos enviados desde tierra y tomar las decisiones mediante las estrategias de control implementadas en dicha estación. En el caso específico de dicha investigación la estación a bordo igualmente fue utilizada para el proceso de validación ya que en ella se adquirieron los mandos enviados por los actuadores y la respuesta del sistema.. 10.
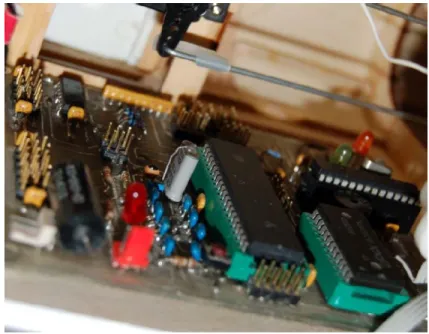
(20) REVISIÓN BIBLIOGRÁFICA. La arquitectura de hardware empleada en el sistema se basa en un microprocesador DSPIC30F4013 conectado con sensores como GPS e IMU, que calculan las señales de control y las transmiten a los actuadores. La estructura general del sistema se presenta en la figura 1.2. Dicha estructura tiene dos componentes claramente definidos: una estación a bordo del avión y una estación en tierra.. Figura 1.2: Estructura general del sistema.. 1.3.1. Estación en tierra Está equipada con una laptop conectada a un radio enlace que se utiliza para trazar la trayectoria a seguir en el vuelo además del monitoreo y la supervisión durante el mismo, y un control remoto para vuelo manual que se utiliza en el despegue, aterrizaje y en situaciones de emergencia durante el vuelo. 1.3.2. Estación a bordo El avión está equipado con un radio enlace para la comunicación con la laptop en tierra. Posee un hardware con un microprocesador DSPIC30F4013 (figura 1.3) que se encarga de ejecutar los algoritmos de control y transmitirlos a los. 11.
(21) REVISIÓN BIBLIOGRÁFICA. actuadores a través de una interfaz de entrada-salida. Se conecta mediante comunicación serie con sensores tales como: •. Unidad de Medición Inercial (IMU): tiene gran ancho de banda. Brinda velocidades y aceleraciones angulares en los ejes. ,. ,. .. También mide la temperatura y la orientación magnética. En este trabajo se utilizará la IMU MTI-G de Xsens (figura 1.4) que brinda velocidades y aceleraciones angulares a una frecuencia de 100 Hz. Además cuenta con un Sistema de Posicionamiento Global (GPS) que proporciona la posición del avión en coordenadas. ,. y .. Figura 1.3: Hardware utilizado para la identificación y el control.. Figura 1.4: IMU MTI-G.. 12.
(22) REVISIÓN BIBLIOGRÁFICA. 1.4. Modelo matemático Podemos mencionar algunas instituciones y universidades que han trabajado en el tema de la modelación analítica: La Universidad de Cranfield “Formation flight autopilot design for the GAF Jindivik Mk 4A UAV” (Lancaster 2004), La Universidad de Aalborg “Autonomous aircraft” (Graversen, Krogh et al. 2001), La FOI “Autopilot Design and Path Planning for a UAV” (Grankvist 2006), La Universidad Tecnológica de Delft “Flight Control Law Design for a Civil Aircraft using Robust Dynamic Inversion” (Bennani and Looye 1998), La Universidad de Noruega de Ciencia y Tecnología “MATHEMATICAL MODELS FOR CONTROL OF AIRCRAFT AND SATELLITES” (Fossen 2011), La Universidad de Stanford ”Longitudinal Stability Augmentation Systems Design for the DragonFly UAV Using a Single GPS Receiver” (Soon and Tomlin 2003), la Universidad de Concepción “Análisis numérico de la estabilidad y control de la estabilidad y control de una aeronave no tripulada” (Dufeu and Pettinelli 2003). 1.4.1. Fuerzas que actúan en el avión La obtención del modelo matemático del avión parte de los propios parámetros físicos y de las fuerzas propias de la mecánica de vuelo de una aeronave y otras independientes, que actúan sobre la nave para que permanezca en vuelo. Entre ellas, cuatro son consideradas como básicas (Figura 1.5) (Dufeu and Pettinelli 2003). •. Sustentación: Esta fuerza de origen aerodinámico es provocada principalmente por las alas del avión y permite que éste se eleve.. •. Arrastre: Esta también tiene su origen en la aerodinámica del avión y se opone a su movimiento. Lo ideal es que esta fuerza sea pequeña.. •. Propulsión: Es la fuerza que produce el motor del avión para impulsarlo. Esta fuerza se opone al arrastre y cuando ambas son iguales el avión mantiene su velocidad.. •. Gravedad: Es provocada por el campo gravitacional de la Tierra y se mantiene relativamente constante en vuelos dentro de la atmósfera. 13.
(23) REVISIÓN BIBLIOGRÁFICA. Las fuerzas más importantes son generadas en el ala y la cola. Esta última es la encargada de balancear las cargas y de dar estabilidad longitudinal al avión. El balanceo, se refiere a la generación de una fuerza de sustentación que produce un momento respecto al centro de gravedad del avión, para equilibrar los momentos generados por el resto de la aeronave. La estabilidad, se refiere a la capacidad del avión para volver a su estado inicial, después de producida una perturbación. El avión debe ser longitudinal, direccional y lateralmente estable para que cumpla con los requerimientos internacionales y minimice las cargas sobre el piloto. Los ejes de estabilidad de acuerdo a los ángulos de Euler para aeronaves dan lugar a los movimientos mostrados en la figura 1.6. En la aviación, el control de un avión es la capacidad de respuesta del piloto al mando del avión. Para que un avión responda a los mandos de control, su estabilidad debe ser alterada. En cierto modo, la estabilidad y el control tienen características inversas, es decir, cuanto mayor es la estabilidad de un avión, menor es su control desde el punto de vista del esfuerzo que debe realizar el piloto, y viceversa.. Figura 1.5: Fuerzas sobre un avión en. Figura 1.6: Movimiento de un avión. vuelo estable.. El control longitudinal se realiza sobre el ángulo de cabeceo, que corresponde al ángulo entre el eje longitudinal y un plano de referencia que corresponde 14.
(24) REVISIÓN BIBLIOGRÁFICA. comúnmente horizontal. La superficie de control de cabeceo, es el elevador, el cual es accionado por el servo elevador. 1.4.2. Partes del avión. Superficies de control. En esta sección se abordarán las partes principales de un avión, así como las superficies de control que posee el mismo. Las principales partes se muestran en la figura 1.7 y son: •. Alas: Proveen el empuje que permite volar al avión. Los alerones están situados en ella.. •. Hélice: Genera la fuerza que mueve el avión hacia delante.. •. Estabilizador Vertical: También se le llama estabilidad longitudinal y se utiliza para dar estabilidad en el plano vertical. El timón de cola está sujeto a él.. •. Estabilizador Horizontal: También se le llama estabilidad lateraldireccional y se utiliza para dar estabilidad en el plano horizontal. El elevador está sujeto a él.. •. Fuselaje: Es el cuerpo del avión. En un avión ordinario alberga a los pasajeros, en uno de pequeño porte guarda los sensores, sistemas de control y demás componentes.. •. Alerones: Se usan para manipular el ángulo de alabeo y guiñada. Ambos alerones se encuentran siempre en sentido contrario.. •. Timón de cola: En aviones comunes se usa para manipular el ángulo de guiñada y así proporcionar a los pasajeros un vuelo más estable. En aviones de pequeño porte no se utiliza mucho.. •. Elevador: Se encuentra sujeto del estabilizador horizontal y se usa para manipular el ángulo de cabeceo.. Tanto los alerones como el timón de cola y el elevador (destacados en rojo en la figura 1.6) constituyen las superficies de control de la aeronave.. 15.
(25) REVISIÓN BIBLIOGRÁFICA. Figura 1.7: Partes de un avión. Superficies de control.. 1.4.3. Modelado Para poder diseñar un autopiloto es necesario primero que todo, la obtención de un modelo matemático. Este se logra a través de dos formas: una es de forma experimental realizándole diferentes pruebas al sistema y otra de manera analítica a través de ciertas asunciones, como pueden ser que el avión en estado estable solo tiene desplazamiento delantero y/o que entre el movimiento longitudinal y el lateral no existen interacciones, etc.; de manera analítica el modelo no describe el comportamiento analítico en su totalidad, pero se acerca bastante a la realidad. La otra es mediante procesamientos más complejos y requieren de sistemas de computo grandes como son cluster de calculo para el modelado mediante elementos finitos (CFD) o mediante el uso de túneles de vientos los que son normalmente usados para el diseño de aviones, donde se ponen modelos escala en túneles de viento y se le realizan pruebas (Graversen, Krogh et al. 2001), dichos ensayos son extremadamente caros y no se cuentan con ello para el modelado de los vehículos que se trabajaron en esta investigación. Para la elaboración del algoritmo de control es necesario tener el modelo de la planta por lo que nos dimos la tarea de hacer los cálculos del mismo de forma 16.
(26) REVISIÓN BIBLIOGRÁFICA. analítica. Alguno de estos parámetros físicos es el largo y ancho del ala, largo y peso del avión, distancias desde el centro de gravedad (c.g), entre otras. El modelo implementado está basado en las ecuaciones no lineales de fuerza y torques que actúan en el avión. La mayor parte de la información que se necesita son parámetros físicos del avión y de esta forma se va linealizando el modelo a través de la serie de Taylor hasta llegar a un modelo linealizado alrededor de un punto de operación. La mayoría de los parámetros son determinados analíticamente, mientras que otros son estimados usando mecanismos analíticos, datos empíricos de tablas de aeromodelismo. Todos los datos son normalizados para su mejor uso al desarrollar los cálculos de cada uno de los movimientos (longitudinal y lateral) del avión y el uso de las tablas y figuras de (Graversen, Krogh et al. 2001; Pamadi 2003; Pamadi 2004) . 1.5. Identificación de UAV La. Identificación. Experimental. de. sistemas. es. la. obtención. de. forma. experimental de un modelo que reproduzca con suficiente exactitud, para los fines deseados, las características dinámicas de la planta en cuestión. En el campo de los UAV, y específicamente de aviones, este método es muy utilizado debido a lo complejas que resultan estas plantas y a que es muy difícil tener en cuenta a la hora de la modelación todas y cada una de las interacciones y fenómenos físicos que tienen lugar en las mismas. Existe una amplia bibliografía sobre identificación experimental de aviones de pequeño porte, para la realización de este trabajo se consultaron los artículos: “Longitudinal Stability Augmentation System Design for the DragonFly UAV Using a Single GPS Receiver” (Soon and Tomlin 2003), “Autonomous aircraft” (Graversen, Krogh et al. 2001), “System Identification of an Autonomous Aircraft using GPS” (Jennifer Evans 1997), “Desarrollo de sistemas de control para autopiloto de avión de pequeño porte” (Carmenate 2009), “Identificación de un vehículo aéreo no tripulado” (Martínez, Pineda et al. 2011).. 17.
(27) REVISIÓN BIBLIOGRÁFICA. En el presente trabajo se realiza la Identificación Experimental con el objetivo de validar modelos obtenidos analíticamente, mediante el uso de datos de entrada-salida recopilados en vuelos donde se éxito la planta en cada uno de los movimientos para ver su respuesta. 1.6. Algoritmos de control Son disímiles los algoritmos de control usados en el mundo para la construcción de autopilotos que van desde controladores PD, cascadas, fuzzy, predictivo y hasta redes neuronales. Ejemplo de esto tenemos: En la figura 1.8 se muestra el elaborado por la Universidad de Concepción de Chile donde realizaron un algoritmo de control en cascada, para el control del movimiento longitudinal (Dufeu and Pettinelli 2003). En la figura 1.9 se muestra una arquitectura similar presentado en el libro “Performance, Stability, Dynamics, and Control of Airplanes” (Pamadi 2004), para el control del movimiento longitudinal.. Figura 1.8: Algoritmo de control en cascada realizado por la Universidad de Concepción.. 18.
(28) REVISIÓN BIBLIOGRÁFICA. Figura 1.9: Algoritmo de control en cascada descrito en el libro “Performance, Stability, Dynamics, and Control of Airplanes” de Bandu N. Pamadi en 2004.. La figura 1.10 es el usado en el reporte del 2001 por los estudiantes de la Universidad de Aalborg (Graversen, Krogh et al. 2001).. Figura 1.9: Esquema de Control con Observador de Estado.. 1.7. Resultados de la revisión bibliográfica A partir de la revisión bibliográfica realizada, y tomando en cuenta el nivel desarrollo en la construcción de autopilotos y de los recursos materiales con que contamos; se tomarán como referencias las investigaciones realizadas por la Universidad de Aalborg en (2001, 2002, 2004, 2005) y como material fundamental el libro “Performance, Stability, Dynamics, and Control of 19.
(29) REVISIÓN BIBLIOGRÁFICA. Airplanes” (Pamadi 2004), para la implementación de los algoritmos para el modelado matemático de aviones de pequeño porte como los que trabajamos en esta investigación. Debido además a que no contamos con los recursos monetarios para adquirir sistemas de cómputo potentes para el uso de software basado en CFD o de túneles de viento. Realizar pruebas de identificación de parámetros en la planta real, para obtener datos de entrada salida con el fin de validar los modelos matemáticos obtenidos, los cuales serán utilizados para la sintonía de los reguladores. Además permitirá determinar parámetros mecánicos que no es posible establecerlos de manera analítica como son las ganancias de brazo de servo contra elevador en el canal longitudinal y servo contra alerón en el canal lateral. Para las estrategias de control se tomará como referencia las arquitecturas de múltiples lazos propuesta por la Universidad de Concepción (Dufeu and Pettinelli 2003) para el canal longitudinal y la del libro “Performance, Stability, Dynamics, and Control of Airplanes” (Pamadi 2004) y realizar la misma arquitectura para el canal lateral; con la diferencia que en el canal longitudinal será una arquitectura de dos lazos y en el canal lateral una compuesta por tres lazos donde el lazo de estabilidad de este canal estará compuesta por una arquitectura P-D. Podemos decir que la aplicación que se desarrolla es de bajo costo, debido a: •. No contamos con la posibilidad de cluster de cálculo para el uso de programas como Fluent o de túneles de viento para tomar los datos de forma más precisa y realizar el modelado a partir de esto, por lo que es necesario realizar el modelado de forma analítica partiendo de las ecuaciones de movimiento de los vehículos.. •. No se cuenta con equipos de cómputo de una alta capacidad para la aeronave como puede ser una PC-104.. 20.
(30) REVISIÓN BIBLIOGRÁ ÁFICA. •. Los sen nsores no son de los mas caros s si hablam mos de IMU Us de alred dedor de 100 0000 dólare es.. Los s pasos a seguir s para a el desarro ollo de auto opilotos son:. 21.
(31) MODELADO ANALÍTICO. 2. Modelado Analítico 2.1. Introducción Siguiendo el libro “Performance, Stability, Dynamic, and Control of Airplane” del autor Bandu N. Pamadi y los reportes de la Universidad de Aalborg del 2001, 2002, 2004 y 2005, se lograron implementar los pasos para la obtención del modelo matemático de los aviones CV10CT del Centro Mecatronics y el N606LS del Centro de Investigaciones GARP desarrollados en este capítulo. En el anexo I podemos encontrar una tabla donde se localizan todos los parámetros físicos necesarios para el cálculo del modelo matemático del avión N606LS. Estos pasos son aplicables para obtener de igual manera modelos matemáticos de aviones que presenten características similares. El rendimiento de los aviones y su estabilidad está normalmente dividida en tres grupos a partir de su velocidad: aviones subsónicos (0-1 Mach), aviones supersónicos (1-5 Mach), aviones hipersónicos (hasta 8 Mach). El avión CV10CT presenta una velocidad de 41.6 m/s y una masa de 32 kg, el N606LS presenta una de 20m/s y una masa de 4,5 kg constituyendo aviones subsónicos, con características distintas, lo que nos permitirá validar los modelos obtenidos y los pasos desarrollados en los mismos para utilizarlos en aviones con características semejantes (subsónicos). En este capítulo, se suministrará una detallada explicación sobre el método seguido para el cálculo del modelo matemático del avión, partiendo de las características físicas del sistema y de las leyes de Newton’s aplicadas a cuerpos inerciales. Además, se verán los distintos sistemas de referencia con su explicación y se toman algunas asunciones para facilitar el modelo matemático que por consiguiente incluyen un error al sistema, pero al ser estos relativamente pequeños no los tomamos en consideración.. 22.
(32) MODELADO ANALÍTICO. 2.2. Sistema de Coordenada:. Figura 2.1: Sistema de Coordenadas. 2.2.1. Referencia tierra Este sistema de coordenadas es fijo en la Tierra (rota con la Tierra) y rota relativo al sistema de coordenadas inerciales. El origen del sistema está en el centro de la tierra, y el eje. coincide con el eje. del sistema inercial. El eje. va en la. intercepción por el meridiano de Greenwich y el eje Ye por el Ecuador a 90o con respecto a. . Muchos GPS (Global Position System) reciben los datos en este. sistema de coordenadas incluidas el que usamos en este proyecto, que en las terminologías del GPS lo denominan como sistema de coordenadas fijo en la Tierra. 2.2.2. Sistema de coordenadas inercial El sistema de coordenadas inercial es importante y esencial para validar la segunda Ley de Newton F=m*a, debido a que todas las aceleraciones se calculan de acuerdo a este sistema. Este no es un sistema de referencia que rote, sin embargo se hace una excepción, es ignorado el movimiento de la Tierra alrededor del Sol. En la mayor parte de los problemas dinámicos se toma el centro de la tierra como el origen del sistema. El eje. va por el Polo Norte y los ejes. y. cortan el. Ecuador.. 23.
(33) MODELADO ANALÍTICO. 2.2.3. Sistemas de Coordenadas de Navegación El origen del sistema de coordenadas de navegación está situado en la superficie de la tierra, en el cual, el eje tierra, el. está orientado en dirección al centro de la esfera. está dado en un punto local y el eje. está orientado hacia el Polo. Norte. Este sistema de coordenadas se pone principalmente hacia la punta del avión. 2.2.4. Sistemas de ejes del cuerpo Este sistema de coordenadas tiene su origen en el centro de masa y en el avión completo se denomina sistema de coordenadas del cuerpo fijo. El eje. está en. dirección de la línea central del avión, con su dirección positiva hacia la dirección del movimiento del avión. El. es perpendicular a la línea central del fuselaje con. dirección positiva hacia la parte derecha del ala, y. es perpendicular al plano. con dirección positiva hacia la parte de abajo del cuerpo. Desde el punto de vista empírico, el eje. se denomina eje longitudinal (eje del alabeo), el eje. el eje lateral (eje del cabeceo) y el eje. es el eje vertical (eje del guiñado). Los. ángulos para el movimiento en esta dirección de denotan como: para el cabeceo y como. ,. y. es. para el alabeo. ,. para el guiñado. Las variaciones de los ángulos se denotan. respectivamente.. 2.2.5. Sistema de Estabilidad Para el control de vuelo, el sistema inercial y el sistema de ejes de la Tierra no son considerados. En cambio se introducirá un sistema de ejes de estabilidad, los que tienen su origen en el centro de gravedad del avión, justamente donde está el sistema de ejes del cuerpo rígido. La diferencia entre el sistema de ejes de estabilidad y el del cuerpo radica en que el de estabilidad es el del cuerpo pero, en estabilidad de vuelo. En la figura 2.1 se ve los dos sistemas de ejes ante disturbios de vuelo.. 24.
(34) MODELADO ANALÍTICO. 2.3. Definición de Ángulos El ángulo de ataque. , es un importante parámetro de estabilidad en el plano. vertical, y define el ángulo entre el vector de velocidad crucero, estabilidad. , que coincide con. , y el eje de. . Si el ángulo de deriva es 0, el eje. coincide. con el vector relativo del ala (en dirección opuesta). El ángulo de ataque se muestra en la figura 2.2.. Fig. 2.2: Definición del ángulo de Ataque.. El ángulo de cabeceo. es usado para describir la orientación del avión, respecto al. plano horizontal, su definición es el que está entre el plano horizontal y el vector velocidad U0. Otros ángulos de importancia son deriva. y guiñado. son dos significativos. ángulos de estabilidad en el plano horizontal. El ángulo deriva se define como el ángulo entre la velocidad delantera y el plano simétrico del avión, descrito en la figura 2.3. El signo del ángulo por convenio es positivo en la dirección derecha.. 25.
(35) MODELADO ANALÍTICO. Figura 2.3: Definición del ángulo de deriva y ángulo de Guiñada.. El ángulo de Guiñado se define como el ángulo entre el plano de referencia y el plano simétrico (plano. ) del avión. El plano de referencia coincide con el sistema. de coordenadas de navegación y coincide con el plano simétrico del avión a vuelo en estado estable (es decir si ningún tipo de disturbio). El ángulo de Alabeo se define como el cambio en el ángulo de rotación en el eje longitudinal. Por convenio el ángulo es positivo en la dirección contraria a las manecillas del reloj. 2.4. Ecuaciones no lineales En este epígrafe mostramos lo básico del modelo y las ecuaciones no lineales de fuerza y momentos angulares. El modelo del avión tiene seis grados de libertad, son los siguientes: F Є R3 Fuerzas externas (N). 26.
(36) MODELADO ANALÍTICO. H Є R3 Momento angular (Nm) Para el modelo hay otras dos asunciones que son: 1. El avión es simétrico en el plano, ver la figura 2.4. 2. El sistema de ejes del cuerpo tienen su origen en el centro de gravedad del avión, y su orientación se ve en la figura 2.4.. Figura 2.4: Vista superior y frontal, simetría de los planos y ejes de orientación.. 2.4.1. Ecuación de fuerza La ecuación de fuerza viene derivado de la segunda Ley de Newton, y usando el teorema de transportación hacemos la ecuación 2.1.. Donde. ,. (2.1). 27.
(37) MODELADO ANALÍTICO. ,. Con. (2.2). ,. 2.4.2. Ecuaciones de momento angular La acción de los torques externos en el avión, en el marco coordenado del cuerpo (M) se puede expresar en la marco coordenado de navegación como:. ,. ,. (2.3). Donde. ,. (2.4). Con la asunción de que es simétrico en el plano vertical del cuerpo, los productos de inercia Ixy = Iyx = Iyz = Izy = 0. Las ecuaciones 2.1 y 2.3 comprende las ecuaciones dinámicas del avión y es donde quedan determinadas las fuerzas externas y los torques.. 28.
(38) MODELADO ANALÍTICO. 2.5. Linealización La linealización de las ecuaciones se realiza con el uso de las series de Taylor y se expanden las ecuaciones 2.1 y 2.3. Las fuerzas y los torques se linealizan separados, lo que permite buscar un set point definitivo para el vuelo estable. Este set point se obtiene haciendo todas las variables iguales a cero excepto por. que es la velocidad inicial y es estable. En. la linealización de las fuerzas y torques, el vector que representa el valor deseado y. (set point) será dividido en. 0 0 0. 0. como se muestra.. 0 0 0 0. 0. (2.5). 2.5.1. Ecuaciones de fuerza Para la ecuación de fuerza (2.1) la expansión de la serie de Taylor de primer orden resulta:. ∆. ∆. (2.6). Donde. ∆. ∆ ∆ ∆. Insertando. 0 0 0 ,. 0 0 0 0 0. ∆. ∆ ∆ ∆. (2.7) ,. y multiplicándolo con ∆. 29.
(39) MODELADO ANALÍTICO. 0 0. ∆. 0 0 0 0. 0 0 0. 0 0 0. 0 0 0. 0 0 0 0 0. ∆ ∆ ∆. 0. ∆ ∆. 0. ∆. 2.5.2. Ecuaciones de momento angular Para la ecuación de momento (2.3) la expansión de la serie de Taylor de primer orden resulta:. ∆. ∆. Donde ∆ ∆ ∆. ∆. ,. Insertando. ∆. ∆. ,. y multiplicándolo con ∆. 1 0 0. 0 1 0. 0 0 1. 0 0 0. 0 0 0. 0 0 0. 0 0 0. 0 0 0. ∆ ∆ ∆. (2.11) ,. hacemos la linealización:. 0 0 0. (2.13). Los resultados de linialización las ecuaciones de fuerza y de torque son:. 30.
(40) MODELADO ANALÍTICO. ∆ ∆ ∆. ∆. ∆. (2.14). 2.6. Coeficientes Aerodinámicos Antes. de. continuar. con. el. modelo,. se. introducirán. algunos. coeficientes. aerodinámicos, los que se usan en las tablas y figuras de (Pamadi 2004) para determinar los parámetros del modelo, y dar los parámetros en forma de coeficientes. Se definen las cantidades siguientes en (Pamadi 2004):. ∆. ∆. ∆. Donde. ∆. ∆. ∆. 1 2 ∆. ∆. 1 2. ∆. ∆. ∆. 1 2 ∆. (2.15). 1 2 ∆. ∆. 1 2. es la velocidad de vuelo,. aerodinámica media, y. ∆. 1 2. es el área de referencia del ala,. es el largo del ala. Como se puede ver ∆. área de referencia y el largo del ala, y para ∆. y∆. es la cuerda se usa el. usa la cuerda aerodinámica media,. las mediciones se pueden encontrar en el anexo I. Para estas definiciones la ecuación indica en la velocidad frontal ∆ nominal. ,. y. ∆. define un número no dimensional que. normalizada relativo a la velocidad frontal. es normalizando el flujo de aire por el lado del cuerpo (sidewash). y la velocidad vertical variable. 31.
(41) MODELADO ANALÍTICO. El ∆. , ∆. , ∆. son la fuerza variable, dirección lateral y la dirección vertical,. todos relacionados con el área de referencia y la velocidad nominal de vuelo. El. ∆. , ∆. , ∆. para los torques del alabeo, cabeceo y guiñado respectivamente,. normalizados respecto al área de referencia y la velocidad nominal de vuelo. y el ángulo de deriva. En el set point el ángulo de ataque. se puede escribir. como:. ∆. ∆. ∆. (2.16). Usando la simplificación de la ecuación 2.16, las ecuaciones de fuerza y torque de 2.14 y las variables normalizadas en la ecuación 2.15 se pueden reescribir como:. ∆. ∆. ∆. 1 2 1. ∆. 1 2. ∆. 1 2 1 1 2. ∆. ∆. ∆. 1 2 1. (2.17). 1 2. 2.7. Movimiento Longitudinal En este apéndice se describen y determinan los datos generales de las fuerzas y los torques. para. el. movimiento. longitudinal.. Las. ecuaciones. del. movimiento. longitudinal se volverán a mostrar con su representación en espacio de estado. 2.7.1. Estimación de las fuerzas generalizadas y los torques En este paso se determinarán las variables de entrada, en las funciones ∆. ∆. , ∆. , ∆. , ∆. , ∆. ,. donde están todas las variables de entradas y control en las. cuales tienen influencias las fuerzas aerodinámicas y los torques.. 32.
(42) MODELADO ANALÍTICO. Primeramente se divide el sistema en dos partes una representa el movimiento longitudinal y la otra el movimiento lateral. Esto se puede hacer aplicando el método de Bryan’s (Pamadi 2004) que se basa en dos asunciones principales. 1. Las fuerzas y los torques aerodinámicos instantáneos dependen de valores en las variables de movimiento. 2. Las fuerzas y los torques aerodinámicos varían linealmente con las variables de movimiento. Además se asume que para las fuerzas y torques aerodinámicos longitudinales ( y. ), tienen influencia solo de las variables longitudinales ,. fuerzas y torques lateral-direccional ( variables laterales , ángulos. de. ataque. ,. y. ,. y . Y para las. ) tienen solo influencia por las. y . Estas asunciones son válidas solamente para pequeños y. deriva.. Donde. los. coeficientes. aerodinámicos. varían. linealmente con el ángulo ataque y deriva. Usando estas asunciones y recordando que estamos trabajando alrededor del set point en un vuelo equilibrado, podemos estimar el movimiento longitudinal usando la serie de Taylor de primer orden dado por:. ∆. ,. ∆ ,. ,. (2.18). ,. Con. 33.
(43) MODELADO ANALÍTICO. ∆. ∆ ∆ ∆. ,. (2.19). ∆ ∆ Donde. ,. ,. ,. y. en el movimiento son los que describen la velocidad. delantera, ángulo de ataque, ángulo cabeceo, velocidad del ángulo de ataque y la y. velocidad angular de cabeceo. Las variables. son la deflexión del elevador y. control del motor. El vector. ,. asume que las fuerzas y momentos longitudinales (. tienen como única influencia las variables longitudinales , que. ,. y. no tienen influencia en. ,. ,. y. ). y . Así asumimos. y en el momento de cabeceo. .. Antes de escribir las ecuaciones, presentamos la notación a utilizar a lo largo del artículo. La notación usada para las derivadas parciales, es igual a la usada en (Pamadi 2004). Ejemplo:. CXU. δC δu. (2.20). Las derivadas con respecto ha. (2.21). ,. ,. ,. , se definen con una pequeña. diferencia, un ejemplo son las ecuaciones 2.22:. (2.22). 34.
(44) MODELADO ANALÍTICO. Introduciendo estas notaciones, el resultado de la ecuación 2.18 se puede escribir de la siguiente manera:. ∆. 2. 2. 2. 2. 2. 2. ∆. (2.23). ,. Las primeras cinco columnas en 2.23 definen la estabilidad del avión sin control. Las otras dos columnas definen la influencia del control de entrada en las fuerzas y torques, que se denominan control derivativo. Estas derivadas permiten encontrar más adelante la matriz de control de entrada descrita en espacio de estado. En la ecuación 2.23 se puede ver que estabilidad mientras que. ,. son las derivadas de. son las derivadas de control evaluadas en el. punto de operación. No obstante, es posible que estos cambien con puntos de operación diferentes, por ejemplo mientras que el avión asciende. 2.7.2. Descripción en espacio de estado del momento longitudinal Las ecuaciones que están en la parte derecha de 2.17 y combinándolas ahora con las ecuaciones de fuerza y momento de ∆. ,. en 2.23 y simplificando las. ecuaciones con las siguientes sustituciones:. 2 2. 1 2. ∆. (2.24). Utilizando lo anterior y realizando dichas sustituciones obtenemos:. 35.
(45) MODELADO ANALÍTICO. ∆ ∆. 1. Donde la notación. ∆ ∆. (2.25). indica la derivada en el tiempo.. Para futuros estudios se reescriben las ecuaciones en espacio de estado, para lo cual se introducen dos nuevas sustituciones:. (2.26). Definiendo el estado y el vector de entrada. ∆ ∆. ∆ ∆ Donde. (2.27). son los estados longitudinales, con Velocidad frontal. ∆. Angulo de ataque Velocidad angular de Cabeceo. ∆. Angulo de Cabeceo. La entrada de control definida por. y donde:. Deflexión en el elevador Control en el motor 36.
(46) MODELADO ANALÍTICO. La ecuación 2.25 escrita ahora en espacio de estado queda de la siguiente manera: (2.28). Donde. 0. 0. 0. 1. (2.29). 0. 0. Esta es la representación en espacio de estado del momento longitudinal. Para determinar los valores de dicho momento se usan variables de la tabla del anexo I, en la cual se presentan los valores del avión N606LS del grupo de Investigaciones GARP posibilitando junto con la implementación de las ecuaciones del anexo II, la obtención del modelo longitudinal para este vehículo. De igual manera se obtuvo el modelo longitudinal del avión CV10CT del Centro Mecatronics. 2.7.3. Modelo longitudinal Como se conoce en el modelo del avión, se tienen dos modelos de espacio de estado, uno es el longitudinal y el otro es el movimiento lateral. Combinando los dos es el modelo completo; mostrado en la figura 2.7.. 37.
(47) MODELADO ANALÍTICO. Cuando se simula el avión, el valor de todos los parámetros buscados en el anexo II e insertando los valores en las matrices 2.29, se obtienen como resultados las matrices 2.30 a) para el avión N606LS y la 2.30 b) para el avión CV10CT, donde los valores son válidos para un vuelo alrededor del punto de operación.. 0.1670 0.9609 2.6001 0. 0.3630 4.7809 6.5001 0. 0.0866 0.4669 0.6830 0. 0.1758 2.9292 53.2296 0. 0 0.9531 7.9741 1. 0.4910 0 0 0. 0 0.2357 0.9783 0 5.5353 0 0 1. 0 0.4160 30.0860 0. 0.0159 0 0.1449 0. (2.30) a). 0 0.2814 51.0182 0. 0.0107 0 0.2412 0. (2.30) b). Figura 2.7: Diagrama de bloque del modelo completo, incluyendo los movimientos longitudinal y lateral.. 2.8. Movimiento Lateral En este apéndice se describen y determinan los datos generales de las fuerzas y los torques para el movimiento lateral. Las ecuaciones del movimiento lateral se volverán a mostrar con su representación en espacio de estado. 38.
(48) MODELADO ANALÍTICO. 2.8.1. Estimación de generalización de las fuerzas y torques Usando la asunción de la no influencia de las variables del movimiento longitudinal. , , ,. en las variables del movimiento lateral. , , ,. . Estas asunciones y. el hecho de que trabajamos alrededor del punto de operación en un vuelo en equilibrio, da la estimación del movimiento lateral usando la serie de Taylor en primer orden y queda como:. ∆. ∆. ,. ,. (2.31). ,. ,. Con. ∆. ,. ∆ ∆ ∆. (2.32). ,. ∆ ∆. Usando la notación compacta 2.31 se puede escribir de la siguiente manera:. ∆. 2. 2. 2. 2. 2. 2. 2. 2. 2. ∆. ,. (2.33). Las primeras cinco columnas en 2.33 definen la estabilidad del avión sin mando. Las otras dos columnas definen la influencia de las entradas de control en las fuerzas y torques, denominándose control derivativo. Estas derivadas permiten luego encontrar la matriz de entrada de control descrita en espacio de estado.. 39.
(49) MODELADO ANALÍTICO. 2.8.2. Descripción en espacio de estado del movimiento lateral La parte derecha de la ecuación 2.17 combinada con las ecuaciones de fuerza y torques de ∆. ,. en 2.33. Para simplificar la ecuación sustituimos:. 2 2. 1 2. 1 2. (2.34). 1 2. Utilizando lo anterior y realizando las sustituciones obtenemos:. ∆ ∆ ∆. ∆ ∆. Donde la notación. (2.35). indica la derivada en el tiempo.. Para futuros estudios se reescribe la ecuación en espacio de estado. Para esto vamos a introducir otras sustituciones:. (2.36). Definición del estado y del vector de entrada:. 40.
(50) MODELADO ANALÍTICO. ∆ ∆ ∆. ∆ ∆. (2.37). Son los estados laterales, donde: ∆. Angulo de Deriva. ∆. Angulo de Alabeo Velocidad angular en el Alabeo. ∆. Angulo de Guiñado Velocidad angular en el Guiñado. La entrada de control está definida en. y donde:. Deflexión en el alerón Deflexión en el timón Ahora la ecuación 2.35 la reescribimos en espacio de estado como:. (2.38). Donde. (2.39). 41.
(51) MODELADO ANALÍTICO. 0. 0. 0. 0. (2.40). Donde. a. CY m b CY. a. 0. a. CY m b CY. a. 0. a. CY b m b CY. a. 1. 0. a. 0. b CY b CY. a. 0. a m m. a. a. 0. a. 0. a. 0. a. 0. a. 0. a. CN I. X. a a. b CN I. b CN I. X. a. CL I. CL I. Z. CN I. ξ. b a. a. ξ. Z. CN I. b. ξ. b a. CN I XZ b. ξ. b a. a. a. CL I. XZ. ξ. b a. CL I. X. a a. a. ξ. CL I Z. XZ. b. b a. XZ. 0. b a. XZ. ξ. b a. XZ. ξ. b a. 2.41. 0 CL I. 42.
(52) MODELADO ANALÍTICO. 2.8.3. Modelo Lateral Al igual que con el movimiento lateral, con los parámetros buscados en el anexo II, se insertan en las matrices; algunos parámetros son estimados basados en tablas (Pamadi 2004). Insertando los valores en las matrices 2.39 y 2.40 obtenemos como resultado la matriz 2.42 a) para el avión N606LS y b) para el avión CV10CT, estos valores son válidos para un vuelo alrededor del punto de operación al igual que para el movimiento longitudinal. 0.00487 0 0.13262 0 3.2813 0.0012 0 2.1851 0 0.9337. 0.2905 0 0.012168 0 0.0057 0.2357 0 0.0007 0 0.0003. 0.0039 1 19.874 0 0.01912. 0 0 0 0 0. 0 0 1 0 41.03 0 0 0 0.4162 0. 0.9999 0 1.3526 1 0.0349 1 0 7.0818 1 1.5501. 0 0 237.16 0 2.7968. 0 0 391.6827 0 1.2992. 0.1394 0 34.4405 0 26.9234. (2.42) a). (2.42) b). 2.9. Validación de los modelos Para la validación del modelo, primeramente se realiza una comparación entre los modelos obtenidos para los aviones N606LS y CV10CT y el modelo de un avión genérico GAA calculado en ”Performance, Stability, Dynamics, and Control of Acrilanes” (Pamadi 2004), también se realizan vuelos de prueba donde se miden los mandos y la respuesta del sistema a dichos mandos, comparándose la misma con la del modelo matemático del avión. En la figura 2.8 se muestra los pasos a seguir para la validación de los modelos analíticos. 2.9.1. Comparación de modelos La respuesta de frecuencia de la función de transferencia de elevador contra ángulo de cabeceo se muestra en la figura 2.9. Se puede apreciar que el N606LS (verde) y 43.
(53) MODELADO ANALÍTICO. CV10CT (rojo) son aviones más rápido que el GAA (azul), esto se explica ya que son aviones mucho más ligero. En la figura 2.10 se puede observar la comparación de las respuestas de lazo abierto ante a una entrada escalón de los avión N606LS y CV10CT, comparándolos con el del avión genérico GAA.. Figura 2.8: Esquema para la validación del modelo analítico.. 44.
(54) MODELADO ANALÍTICO. Bode Diagram 40 GAA Magnitude (dB). 20. GARP CV 10CT. 0 -20 -40 -60 270. Phase (deg). 225 180 135 90 45 0. -3. 10. -2. 10. -1. 0. 10. 1. 10. 2. 10. 10. Frequency (rad/sec). Figura 2.9: Respuesta de frecuencia de la función de transferencia de elevador contra ángulo de cabeceo (N606LS (verde) y CV10CT (rojo) son aviones más rápido que el. GAA (azul)).. Step Response 6 GAA. 4. GARP CV10CT. 2. Amplitude. 0 -2 -4 -6 -8 -10 -12 -14. 0. 50. 100. 150. 200. Time (sec). Figura 2.10: Respuesta ante una entrada escalón el lazo de estabilidad del canal longitudinal (elevador-ángulo de cabeceo). 45.
(55) MODELADO ANALÍTICO. 2.9.2. Identificación experimental Para la identificación de sistemas se utilizan datos experimentales de entrada-salida tomados de vuelos reales. Este método es muy utilizado porque es directo, basado en datos reales permitiendo la validación y el refinamiento del modelo durante el proceso de modelación (Adiprawita, Ahmad et al. 2007). Para realizar la identificación se lleva a cabo un experimento en pleno vuelo. Dicho experimento se diseña para excitar los controles del avión de forma natural (aunque el diseño descansa en un conocimiento previo de la dinámica del avión) (Soon and Tomlin 2003). Durante el experimento el piloto transmite al avión una señal de mando aleatoria registrándose los cambios provocados. Para que la identificación del sistema sea exitosa es necesario que las entradas al sistema durante la recogida de datos exciten en el sistema las frecuencias deseadas. Esto se puede alcanzar provocando pequeños cambios de altura y de giros en el avión durante el vuelo. Para lograr una validación de los modelos obtenidos analíticamente dichos mandos deben realizarse de forma separada; excitando en las primeras pruebas solamente el elevador y registrando el comportamiento del ángulo de cabeceo sin mover los alerones ni el timón de dirección, para de esta forma validar el canal longitudinal. Como segundo experimento y para validar el canal lateral se mantiene sin mover el elevador del avión y se realizan mandos aleatorios a los alerones y de igual manera registramos el cambio de ángulos en este caso el cambio del anulo de alabeo (Hernández, Martínez et al. 2008). Los datos resultantes se almacenan en tierra y se procesan para ser utilizados en la identificación; siendo necesario que el hardware esté probado y que el avión esté equipado con todo el hardware necesario. El programa para la recolección de los datos también tiene que ser probado e instalado.. 46.
(56) MODELADO ANALÍTICO. El proceso de identificación experimental que se explicará en este epígrafe, fue el desarrollado con el avión CV10CT pues presenta una mayor potencia y masa permitiendo que la aeronave sea menos inmune a las perturbaciones díganse rachas de vientos, lo que nos posibilita tener un juego de datos de entrada-salida con mejores características para el proceso de validación de los modelos analíticos. Como parte de esta investigación se realizó un experimento como el descrito anteriormente. El hardware utilizado (figura 1.3) posee un microprocesador DSPIC30F4013 y el elemento de medición a bordo del avión es una Unidad de Medida Inercial (IMU), utilizando específicamente la MTI-G que se muestra en la figura 1.4. Los valores obtenidos durante el vuelo se presentan en la figura 2.8 (a) el movimiento longitudinal y en la figura 2.8 (b) el movimiento lateral.. (a). (b). Figura 2.8: Datos adquiridos en pleno vuelo del avión CV10CT para la validación de los modelos longitudinal y lateral. Señal de excitación (verde) y ángulo de respuesta del avión (azul).. Para la identificación se utiliza el toolbox de Identificación de Sistemas de MatLab. Se realiza un pre procesamiento en el cual eliminamos la media aritmética de estos como datos erróneos producidos por perdidas en el canal de comunicación.. 47.
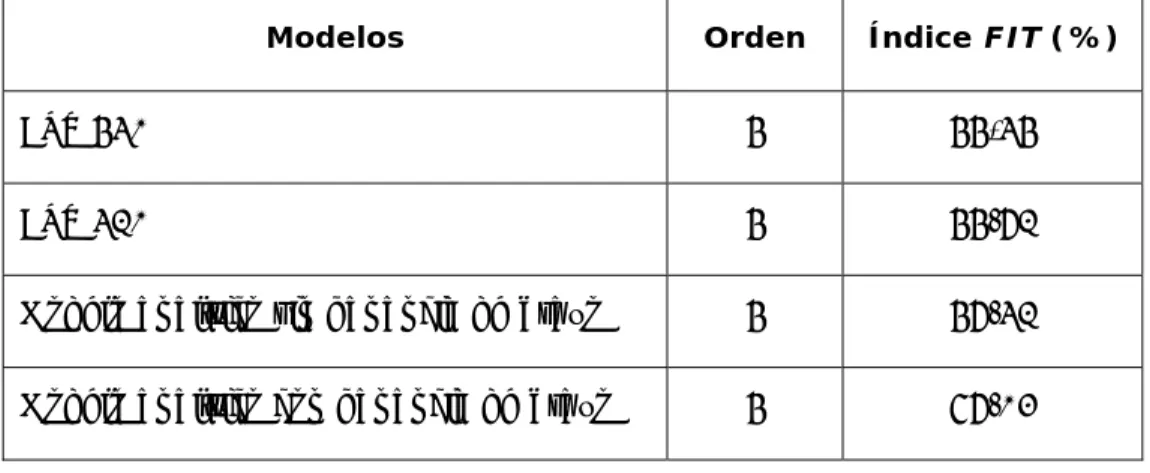
(57) MODELADO ANALÍTICO. Para evaluar el comportamiento de los modelos cualitativamente se emplea el índice FIT, el cual se calcula como (Martínez, Pineda et al. 2011):. 100. 1. ,. %. Donde: - vector de los datos de validación - vector de las salidas del modelo 2.9.3. Identificación experimental del canal longitudinal Con. la. identificación. experimental. el. objetivo. que. se. persiguió. fue. fundamentalmente la validación de los modelos con juegos de datos reales de entrada. Además se realiza una pequeña comparación con modelos ARX que presenten un número de polos y ceros parecidos a los de los modelos y que son los que se expone en la bibliografía. Los resultados gráficos de seguimiento de señal en el canal longitudinal de los modelos se muestran en la figura 2.9 y el índice (FIT) en la Tabla 2.1. Tabla 2.1: Comparación de exactitud de los modelos en el canal longitudinal. Modelos. Orden. Índice FIT (%). ARX 541. 5. 55,45. ARX 421. 5. 55.72. Modelo analítico sin ganancia de brazo. 5. 57.42. Modelo analítico con ganancia de brazo. 5. 67.13. 48.
(58) MODELADO ANALÍTICO. Figura 2.9: Seguimiento de señal en el canal longitudinal. Analizando la figura 2.9 y el índice FIT de la tabla 2.1, se puede llegar a la conclusión que los resultados de seguimientos de señal del modelo analítico con ganancia de brazo incluida presentan un buen índice de seguimiento de señal; teniendo en cuenta que hay datos que se perdieron en el vuelo real, por lo que el modelo longitudinal queda validado. Además de este análisis podemos obtener algunos datos adicionales: •. Se logró identificar la ganancia que existe entre el ángulo que da el servo y el ángulo final del elevador es de 1.8, mediante identificación es la mejor manera de obtener dicha ganancia cometiendo el menor error posible.. •. El modelo analítico describe adecuadamente el comportamiento del canal longitudinal del avión.. •. El experimento se realizó de forma correcta. Se éxito adecuadamente la planta para ver su respuesta en el canal longitudinal manteniendo el canal lateral con la menor excitación posible para poder considerar los canales desacoplados.. 49.
Figure


+7





Documento similar
[r]
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
Este capítulo epistemológico se inicia con la definición de feminismo como movimiento social y generador de teoría crítica, para tratar, después, las discusiones contemporáneas
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Para recibir todos los números de referencia en un solo correo electrónico, es necesario que las solicitudes estén cumplimentadas y sean todos los datos válidos, incluido el
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Este mismo régimen de deberes tiene sentido cuando la actuación de reforma o renovación significa un cambio radical de la morfología urbana, normalmente acompa- ñado por un cambio
