Acajete
PUEBLA
PLANTEL LA MAGDALENA
MANUAL DE PRÁCTICAS
MÓDULO PROFESIONAL III
“PROGRAMA SISTEMAS MECATRÓNICOS Y VERIFICA SU FINCIONAMENTO
”
---SUBMÓDULO lll
“UTILIZA Y PROGRAMA MICROCONTROLADORES”
CARRERA: MECATRÓNICA COMPONENTE: PROFESIONAL
SEMESTRE: CUARTO
ELABORADO POR: PROF. ALFREDO TAPIA CAMPOS. FECHA DE ELABORACIÓN: FEBRERO 2012
PLANTEL LA MAGDALENA
Introducción
Este manual de prácticas fue realizado para facilitar al alumno el
aprendizaje teórico y práctico, para que desarrolle las competencias con mayor
facilidad que le servirán para el desarrollo de habilidades, destrezas conocimientos
y actitudes que utilizará en el campo laboral y también le permitirán continuar sus
estudios superiores como profesional técnico o una ingeniería a fin.
Con base a las necesidades industriales tanto como del sector público
como privado que se presentan en nuestro país y debido a la vertiginosa
velocidad del avance tecnológico; es necesario generar un nuevo paradigma; el
cual demanda la preparación del recurso humano calificado que participe
directamente en actividades productivas para el desarrollo del país.
Al Concluir este submódulo habrás asimilado y comprendido los conocimientos,
habilidades y destrezas necesarias para utilizar y programar microcontroladores
para sistemas de control
con lo que podrás incorporarte inmediatamente, al
campo laboral ya que existe mucha demanda y puedes obtener buenos
ingresos
económicos.
Acajete
PUEBLA
PLANTEL LA MAGDALENA
ÍNDICE
1. Práctica 1
Conexión básica para el PIC 16F84
2. Práctica 2
Configuración para el PIC 16F84
3. Práctica 3
Configuración y activación de puertos
4. Práctica 4
Control de un motor DC
5. Práctica 5
Rutina de temporización
6. Práctica 6
Descarga de programas
PLANTEL LA MAGDALENA
NÚMERO DE LA PRÁCTICA 1
NOMBRE DE LA PRÁCTICA Conexión básica para el Microcontrolador PIC 16F84
NOMBRE DEL ALUMNO
GRUPO Mecatrónica 4to semestre FECHA
HABILIDADES A DESARROLLAR
Selecciona y conecta materiales electrónicos.
Lee diagramas electrónicos de conexión. Elabora y utiliza fuentes de alimentación.
MARCO TEÓRICO
Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos. Por ejemplo, el controlador que regula el funcionamiento de un horno dispone de un sensor que mide constantemente su temperatura interna, cuando sobrepasa los límites prefijados, genera las señales adecuadas para intentar llevar a la temperatura al rango estipulado.
Aunque el concepto de controlador ha permanecido invariable a través del tiempo, su implementación física ha variado notablemente. Hace tres décadas, los controladores se construían con componentes de lógica discreta; posteriormente se emplearon los microprocesadores, que se rodeaban con chips de memoria y E/S sobre una tarjeta de circuito impreso. En la actualidad, todos los elementos del controlador se han podido incluir en un solo chip, el cual recibe el nombre de microcontrolador.
Realmente consiste en una sencilla pero completa computadora contenida en el corazón de un circuito integrado.
El microcontrolador es un circuito integrado de alta escala de integración que incorpora la mayor parte de los elementos que configuran un controlador. Se dice que es “la solución en un chip”
porque su reducido tamaño minimiza el número de componentes y el costo.
Un microcontrolador dispone de los siguientes componentes:
Procesador o CPU
Memoria RAM para contener los datos
Memoria de solo lectura para contener el programa
Líneas de entrada y salida para comunicarse con el exterior
Diversos módulos para el control de periféricos (Temporizadores, puertos serie y paralelo, conversores analógicos a digitales, etc.)
Acajete
PUEBLA
PLANTEL LA MAGDALENA
MATERIALES EQUIPO O HERRAMIENTA
Tablilla protoboard. PIC 16F84.
Cristal oscilador de 4 MHZ. Dos capacitores de 22 Pf. 2 resistencias 10 K 8 resistencias 330 8 diodos led
5 botones pulsadores.
Fuente de alimentación de 5 v. Cable para protoboard.
Multímetro Pinzas
PROCEDIMIENTO
1.- Revisa el diagrama de conexión para el Microcontrolador. 2.- Realiza la conexión del cristal oscilador.
3.- Realiza la conexión del reset para el PIC. 4.- Conecta un botón pulsador al puerto A 5.- Conecta un diodo led al puerto B.
DIBUJOS O ESQUEMAS
PLANTEL LA MAGDALENA
NÚMERO DE LA PRÁCTICA 2
NOMBRE DE LA PRÁCTICA Configuración para el PIC 16F84
NOMBRE DEL ALUMNO
GRUPO Mecatrónica 4to semestre FECHA
HABILIDADES A DESARROLLAR
Utiliza herramientas informáticas para la configuración del PIC
MARCO TEÓRICO
Arquitectura cerrada y abierta
Para resolver aplicaciones sencillas se precisan pocos recursos; en cambio, las aplicaciones grandes requieren numerosos y potentes recursos. Siguiendo esta filosofía, los fabricantes de microcontroladores construyen diversos modelos orientados a cubrir, de forma óptima, las necesidades de cada proyecto. Esta es la razón por la que existen dos tendencias para resolver las demandas de los usuarios:
Arquitectura cerrada
Cada modelo se construye con un determinado procesador (CPU), cierta capacidad de memoria de datos, cierto tipo y capacidad de memoria de instrucciones, un número de E/S y un conjunto de recursos auxiliares muy concreto. El modelo no admite variaciones ni ampliaciones. La aplicación a la que se destina debe encontrar en su estructura todo los que precisa y, en caso contrario, hay que desecharlo.
Arquitectura abierta
Estos microcontroladores se caracterizan porque, además de disponer de una estructura interna determinada, pueden emplear sus líneas de E/S para sacar al exterior los buses de datos, direcciones y control, con lo que se posibilita la ampliación de la memoria y las E/S con circuitos integrados externos.
Arquitectura Básica
Acajete
PUEBLA
PLANTEL LA MAGDALENA
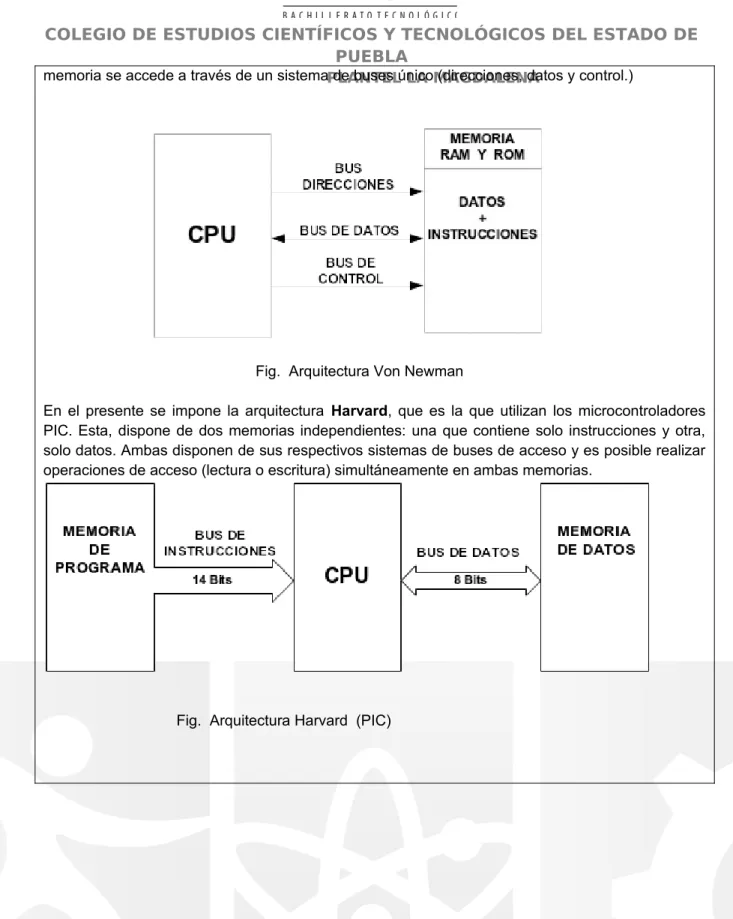
memoria se accede a través de un sistema de buses único (direcciones, datos y control.)
Fig. Arquitectura Von Newman
En el presente se impone la arquitectura Harvard, que es la que utilizan los microcontroladores PIC. Esta, dispone de dos memorias independientes: una que contiene solo instrucciones y otra, solo datos. Ambas disponen de sus respectivos sistemas de buses de acceso y es posible realizar operaciones de acceso (lectura o escritura) simultáneamente en ambas memorias.
PLANTEL LA MAGDALENA
MATERIALES EQUIPO O HERRAMIENTA
Tablilla protoboard. PIC 16F84.
Cristal oscilador de 4 MHZ. Dos capacitores de 22 Pf. 2 resistencias 10 K 8 resistencias 330 8 diodos led
5 botones pulsadores.
Fuente de alimentación de 5 v. Cable para protoboard.
Multímetro Pinzas
Computadora personal.
Software para programación de microcontroladores.
PROCEDIMIENTO
1.- Revisa el diagrama de conexión para el Microcontrolador. 2.- Realiza la conexión del cristal oscilador.
3.- Realiza la conexión del reset para el PIC.
4.- Conecta botones pulsadores al pulsadores al puerto A 5.- Conecta diodos led al puerto B.
6.- Realiza el programa que permita encender los bits 0,1,3,5 y 7 del puerto B 7.- modifica el programa y ahora enciende los bits 0, 3 y 7 del puerto B
Acajete
PUEBLA
PLANTEL LA MAGDALENA
PLANTEL LA MAGDALENA
ÚMERO DE LA PRÁCTICA 3
NOMBRE DE LA PRÁCTICA Configuración y activación de puertos
NOMBRE DEL ALUMNO
GRUPO Mecatrónica 4to semestre FECHA
HABILIDADES A
DESARROLLAR
Utiliza herramienta eléctrica. Realiza la conexión de dispositivos. Usa instrumentos de medición.
MARCO TEÓRICO
CARACTERÍSTICAS BÁSICAS DEL PIC16F84.
El Microcontrolador PIC16F84 es un circuito integrado de 18 pines fabricado con tecnología CMOS, existen en diferentes versiones de encapsulado como por ejemplo el DIP (Versión convencional) y el SOIC (Montaje superficial). La frecuencia de trabajo está entre 4 Mhz y 20 Mhz. Las versiones que se estipulan en una frecuencia de trabajo de 4 Mhz podrán trabajar sin ningún problema hasta los 10 Mhz. Observemos la siguiente imagen que muestra como están organizados los pines del microcontrolador PIC16F84:
Acajete
PUEBLA
PLANTEL LA MAGDALENA
IDENTIFICACIÓN DE LOS PINES UTILIZADOS PARA LOS PUERTOS DE ENTRADA Y SALIDAS.
En la imagen anterior se podrá observar claramente que el microcontrolador tiene dos puertos denominados "A" y "B". El puerto "A" tiene 5 líneas disponibles (RA0, RA1, RA2, RA3, RA4 ) y el puerto "B" tiene 8 líneas disponibles (RB0, RB1, RB2, RB3, RB4, RB5, RB6, RB7 ). Ambos Puertos suman un total de 13 líneas que podrá ser programadas independientemente como entradas o como salidas. Estas son las líneas que estarán destinadas para comunicar el microcontrolador con el mundo exterior, como por ejemplo: Un motor Paso a Paso, Diodos Luminosos "Leds", Módulos LCD, Teclados Matriciales, etc. También observe que el Pin No. 3 perteneciente al puerto "A" = RA4 también tiene otra nomenclatura denominada "TOCKI" lo cual quiere decir que esta línea podrá ser programada como entrada, salida y temporizador/contador.
MATERIALES O
SUSTANCIAS EQUIPO O HERRAMIENTA
Tablilla protoboard. PIC 16F84.
Cristal oscilador de 4 MHZ. Dos capacitores de 22 Pf. 2 resistencias 10 K 8 resistencias 330 8 diodos led
5 botones pulsadores.
Fuente de alimentación de 5 v. Cable para protoboard.
Multímetro Pinzas
Computadora personal.
Software para programación de microcontroladores.
PROCEDIMIENTO
1.- Revisa el diagrama de conexión para el Microcontrolador.
2.- Realiza la conexión del cristal oscilador.
3.- Realiza la conexión del reset para el PIC.
4.- Conecta botones pulsadores al pulsadores al puerto A
5.- Conecta diodos led al puerto B.
6.- Realiza el programa que permita configurar al puerto a como entrada y al puerto B como salida
7.- complementa el programa con la modificación que permita monitorear el estado del puerto A en el Puerto B.
PLANTEL LA MAGDALENA Esto es si RA2 =1 entonces RB0=1.
Si RA2 =0 entonces RB0=0.
9.- realiza los programas que presenten la aplicación de funciones lógicas con el puerto A y mostrando su activación en el bit 0 del puerto B.
Acajete
PUEBLA
PLANTEL LA MAGDALENA
PLANTEL LA MAGDALENA
NÚMERO DE LA PRÁCTICA 4
NOMBRE DE LA PRÁCTICA Control de un motor DC
NOMBRE DEL ALUMNO
GRUPO Mecatrónica 4to semestre FECHA
HABILIDADES A DESARROLLAR
Utiliza herramienta eléctrica. Realiza la conexión de dispositivos. Usa instrumentos de medición.
MARCO TEÓRICO
El microcontrolador PIC16F84 dispone de un total de 35 instrucciones de una sola palabra que usted podrá aprenderse muy fácilmente. Nuestro curso va orientado a entender y programar el PIC16F84 de una manera sencilla y rápida por lo que explicaremos a continuación el conjunto de instrucciones, su significado, modo de operación y traducción.
Las instrucciones tienen algunas letras que van relacionadas y que tienen cierta interpretación. Por ejemplo la letra "W" es el registro mas importante que tiene el microcontrolador y es denominado ACUMULADOR. En este registro todas las operaciones pasan a través de el.
No. Instrucción Descripción Observación
1 ADDWF f,d Sumar W + f
Esta instrucción suma el contenido de un registro específico al contenido del registro de "W" donde "f" puede ser un registro cualquiera con un determinado valor.
Por ejemplo: Si el contenido de "W" antes de ejecutar la instrucción tenía un valor de 20 y el registro "f" tiene un valor de 5, en el momento que se ejecuta la instrucción el resultado obtenido es 25.
Acajete
PUEBLA
PLANTEL LA MAGDALENA
utiliza la letra "d" en el cual podrá escribirse "0" o "1"; si la letra d=0el resultado de la operación se ubicará en el registro "W"; por otro lado si d=1 el resultado de la operación se ubicará en "f".
Hagamos un ejemplo sencillo y supongamos que W=4 y (f) = 3 antes de ejecutar la instrucción:
Si escribimos la instrucción de la siguiente manera: ADDWF f,0 significa que el contenido del registro "f=3" se sumará con el contenido del registro "W=4" y el resultado se alojará en el acumulador "W" tomando el valor de "W=7"; el registro "f" mantendrá su valor "f=3".
Ahora sí la instrucción esta escrita así: ADDWF f, 1 significa que el contenido del registro "f=3" se sumará con el contenido del registro "W=4" y el resultado se alojará en el registro "f" tomando el valor de "f=7"; el acumulador mantendrá su valor "W=4".
Esta explicación de la letra "d" será valida de igual manera para todas las instrucciones que contengan este parámetro.
Otro punto importante esta referido a la letra "f" la cual puede ser cualquier nombre y no específicamente la letra "f"; por ejemplo ADDWF regist,1 donde regist es un registro de uso general de la memoria RAM.
MATERIALES EQUIPO O HERRAMIENTA
Tablilla protoboard. PIC 16F84.
Cristal oscilador de 4 MHZ. Dos capacitores de 22 Pf. 2 resistencias 10 K 8 resistencias 330 8 diodos led
5 botones pulsadores.
Fuente de alimentación de 5 v. Cable para protoboard.
Multímetro Pinzas
Computadora personal.
Software para programación de microcontroladores.
PROCEDIMIENTO
1.- Revisa el diagrama de conexión para el Microcontrolador.
2.- Realiza la conexión del cristal oscilador.
PLANTEL LA MAGDALENA 4.- Conecta botones pulsadores al puerto A
5.- Conecta un motor CD al puerto B.
6.- Realiza el programa que permita configurar al puerto a como entrada y al puerto B como salida.
7.- Manipula el encendido y apagado del motor.
8.- Realiza un programa para la autoretención del encendido del motor.
DIBUJOS O ESQUEMAS
Acajete
PUEBLA
PLANTEL LA MAGDALENA
NÚMERO DE LA PRÁCTICA 5
NOMBRE DE LA PRÁCTICA Rutina de temporización
NOMBRE DEL ALUMNO
GRUPO Mecatrónica 4to semestre FECHA
HABILIDADES A DESARROLLAR
Utiliza herramienta eléctrica. Realiza la conexión de dispositivos. Usa instrumentos de medición.
MARCO TEÓRICO
El motor de corriente continua es una máquina que convierte la energía eléctrica en mecánica, provocando un movimiento rotatorio. En la actualidad existen nuevas aplicaciones con motores eléctricos que no producen movimiento rotatorio, sino que con algunas modificaciones, ejercen tracción sobre un riel. Estos motores se conocen como motores lineales.
Esta máquina de corriente continua es una de las más versátiles en la industria. Su fácil control de posición, paro y velocidad la han convertido en una de las mejores opciones en aplicaciones de control y automatización de procesos. Pero con la llegada de la electrónica su uso ha disminuido en gran medida, pues los motores de corriente alterna, del tipo asíncrono, pueden ser controlados de igual forma a precios más accesibles para el consumidor medio de la industria. A pesar de esto los motores de corriente continua se siguen utilizando en muchas aplicaciones de potencia (trenes y tranvías) o de precisión (máquinas, micromotores, etc.)
La principal característica del motor de corriente continua es la posibilidad de regular la velocidad desde vacío a plena carga.
Su principal inconveniente, el mantenimiento, muy caro y laborioso.
Una máquina de corriente continua (generador o motor) se compone principalmente de dos partes, un estator que da soporte mecánico al aparato y tiene un hueco en el centro generalmente de forma cilíndrica. En el estator además se encuentran los polos, que pueden ser de imanes permanentes o devanados con hilo de cobre sobre núcleo de hierro. El rotor es generalmente de forma cilíndrica, también devanado y con núcleo, al que llega la corriente mediante dos escobillas.
PLANTEL LA MAGDALENA
MATERIALES EQUIPO O HERRAMIENTA
Tablilla protoboard. PIC 16F84.
Cristal oscilador de 4 MHZ. Dos capacitores de 22 Pf. 2 resistencias 10 K 8 resistencias 330 8 diodos led
5 botones pulsadores.
Fuente de alimentación de 5 v. Cable para protoboard.
Multímetro Pinzas
Computadora personal.
Software para programación de microcontroladores.
PROCEDIMIENTO
1.- Revisa el diagrama de conexión para el Microcontrolador.
2.- Realiza la conexión del cristal oscilador.
3.- Realiza la conexión del reset para el PIC.
4.- Conecta botones pulsadores al puerto A
5.- Conecta diodos led al puerto B.
6.- Realiza el programa que permita configurar al puerto a como entrada y al puerto B como salida.
7.- Manipula el encendido y apagado del motor insertando un retardo a la desactivación.
Acajete
PUEBLA
PLANTEL LA MAGDALENA
PLANTEL LA MAGDALENA
NÚMERO DE LA PRÁCTICA 6
NOMBRE DE LA PRÁCTICA Descarga de programas
NOMBRE DEL ALUMNO
GRUPO Mecatrónica 4to semestre FECHA
HABILIDADES A DESARROLLAR
Utiliza herramienta eléctrica. Realiza la conexión de dispositivos.
Usa las TIC para realizar la descarga del programa.
MARCO TEÓRICO
PROGRAMADORES
Antes de comenzar la sección práctica de nuestro curso, tenemos que explicar algo de los programas que están dedicados a programar el microcontrolador PIC16F84.
En la actualidad existen muchos programadores desde lo más sencillos que constan de algunos elementos electrónicos solamente hasta circuitos complejos controlados por microcontroladores. Los programadores tienen su mayor diferencia en la cantidad de microcontroladores diferentes que pueden programar. Este programador versátil trabaja en la plataforma de Windows únicamente y por demás muy económico. En segundo lugar tenemos el programador de la empresa Microchip Tecnologies denominado PIC START PLUS. Este programador tiene la capacidad de poder programar casi toda la línea Microchip en todos los microcontroladores hasta 40 pines. Este programador es uno de los mas sofisticados.
VENTAJAS Y DESVENTAJAS DE LOS DIFERENTES PROGRAMADORES:
Acajete
PUEBLA
PLANTEL LA MAGDALENA
La mayoría de los programadores sencillos quedan congelados para el microcontrolador para la cual fue diseñado y si usted necesita hacer un cambio de microcontrolador, seria muy posible que tenga que hacer otra inversión en un programador.
QUE NECESITAMOS ANTES DE PROGRAMAR
Antes de comenzar a programar en el editor de Textos usted debe obtener una copia del compilador denominado MPLAB IDE que proporciona la empresa Microchip. Este programa es de libre distribución y representa la versión 5.11 en el idioma Ingles. El programa tiene un tamaño de 9.5 MB. Si usted tiene una conexión vía modem de 56 K, podrá bajar el software completamente en unos 70 Minutos. Dependiendo de las condiciones ideales de la conexión, puede ser un poco menos o un poco mas de tiempo. Para este curso, no importara que versión de MPLAB usted tenga ya que todos ellos disponen del microcontrolador PIC16F84. En la pagina de Microchip Tecnologies se puede obtener la ultima versión del MPLAB ( Versión 5.3 ), la diferencia entre las versiones radica específicamente en la capacidad de programar los nuevos microcontroladores que salen al mercado. Por ejemplo la versión de MPLAB 5.0 no dispone de la información del microcontrolador PIC16F870; pero la versión de MPLAB 5.2 se le ha incluido este microcontrolador.
Cuando usted haga doble click en el Link que baja automáticamente la versión 5.11 del MPLAM, la computadora le preguntará si desea abrir el archivo o grabar el archivo. Usted deberá seleccionar grabar el archivo.
Después de haber seleccionado la opción de guardar el archivo en el disco, deberá hacer doble click en el botón"ACEPTAR". y seguidamente se le preguntara donde quiera guardar el archivo:
MATERIALES EQUIPO O HERRAMIENTA
Tablilla protoboard. PIC 16F84.
Cristal oscilador de 4 MHZ. Dos capacitores de 22 Pf. 2 resistencias 10 K 8 resistencias 330 8 diodos led
5 botones pulsadores.
Fuente de alimentación de 5 v. Cable para protoboard.
Multímetro Pinzas
Computadora personal.
PLANTEL LA MAGDALENA
PROCEDIMIENTO
1 Editar o crear un archivo utilizando el programa SIM84.EXE.
a) Ejecutar el archivo SIM84.EXE
b) Al ejecutar el programa entramos al ambiente del software, en este aparece un
menú principal, el cual tiene las siguientes opciones:
Seguiremos las opciones 1,2,3,4 y 6 para crear un archivo y simularlo.
1. Captura, Ensamblado y simulación de Programa
a). Una vez en el programa de Sim84, seleccione la opción numero 1, que es
Asignar Nombre.
b). Una vez que ha dado el nombre a su programa, seleccione la opción numero 2,
que es Llamar al editor, para capturar el programa correspondiente. Dentro del
editor debemos usar la directiva LIST para dar el tipo de microcontrolador que
usaremos en el circuito, en este caso es el modelo 16F84, existen otros tales
como 16F877, 12C508, 16F620 etc..
Después de escribir el tipo de procesador que se usará, se empieza a escribir el
programa, respetando las columnas para cada campo (ETIQUETAS,
INSTRUCCIÓN, OPERANDOS y COMENTARIOS).
Una vez capturado el programa se sale del editor, quedando nuevamente en el
menú principal de sim84.
Menú Principal
1. Asignar nombre
2. Llamar al editor
3. Ensamblar
4. Cargar fichero HEX
5. Opcionesde simulación
6. Ejecutar
7. Trazar
8. Visualizar registros
9. Alterar registros
ESC. Salir al DOS
Acajete
PUEBLA
PLANTEL LA MAGDALENA
c). Dentro del menú principal, se selecciona la opción número 3. Ensamblar,
permitiendo pasar el programa de código nemónico a código hexadecimal que es
el que finalmente se cargará dentro del microcontrolador PIC. Si el ensamblado del
programa fue satisfactorio, sin errores, se procede a salir de esta opción para
regresar al menú principal. Si hay errores en el ensamblado, se deberá proceder
nuevamente a usar la opción 2 del menú principal que es llamar al editor, esto
con la finalidad de corregir los errores señalados en el proceso de ensamblado.
d). Dentro del menú principal, se selecciona la opción número 4. Cargar fichero
HEX en la memoria de la computadora.
e). Dentro del menú principal, se selecciona la opción número 6. Ejecutar
programa, de esta manera se simulará el programa cargado y se verificará si
funciona de acuerdo a la lógica que se estableció.
Finalmente si la simulación es satisfactoria, se podrá grabar el PIC con el mismo
programa HEX que se usó, pero ahora para verificar de manera real el
funcionamiento del programa.
DIBUJOS O ESQUEMAS
Siguiendo de manera secuencial el proceso de trabajo con el PIC, ahora
continuamos con el grabado, para lo cual se podrá utilizar cualquier software, esto
dependerá del programador que se use. Así que utilice el programador de su
preferencia y finalice el experimento verificando el funcionamiento del programa en
el PIC de manera real.
Para observar su funcionamiento en la Tarjeta de Evaluación de
Microcontroladores PIC, es necesario que se utilice el programa EPICWIN para
bajar el programa al chip. Para realizar el proceso de grabado se siguen los
siguientes pasos:
PLANTEL LA MAGDALENA
2. Abra el programa a grabar en el chip (File – Open).
Acajete
PUEBLA
PLANTEL LA MAGDALENA
4. De la nueva ventana que aparece de “
Configuration”, establecemos los bits de
trabajo del PIC: tipo de Oscilador en este caso y en su mayoría XT, Codigo de
Protección Off, Watchdog Timer deshabilitado, Low Voltaje Program
deshabilitado(PIC16F877), en el pic 16F84 Low Voltaje Program no aparece
como opción.
PLANTEL LA MAGDALENA
CONCLUSIONES
BIBLIOGRAFÍA
1.- Enrique Palacios. Microcontrolador PIC 16F84. Desarrollo de proyectos. ED Alfa Omega.
2.- W. Bolton mecatrónica sistemas de control electrónico en la ingeniería mecánica y electrónica. Ed. Alfa
omega.
Acajete
PUEBLA