INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA
MECANICA Y ELECTRICA
REPORTE TÉCNICO
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN COMUNICACIONES Y
ELECTRÓNICA.
P R E S E N T A:
CASTILLO BAUTISTA BRAULIO ANTONIO
ASESORES:
Ing. Armando Martínez Ríos
Ing. Carlos Barroeta Zamudio
MEXICO, D.F. 2009
“Implementación de un protocolo de
comunicación inalámbrica para el control de
dispositivos en forma remota de una casa
II AGRADECIMIENTOS
Quiero agradecer a la vida y a dios por haberme dado lo que he necesitado, por haberme puesto dentro de una familia maravillosa, me ha dado la satisfacción de
culminar mis estudios y día con día me da grandes alegrías
A mis padres Braulio Castillo Ortíz y Virginia Bautista Márquez a quienes amo, respeto y admiro y son quienes me han enseñado a esforzarme por alcanzar mis
metas, gracias por haber estado presentes en todo momento, por su apoyo incondicional y sacrificios sobrehumanos que con nada pago, los amo.
Agradezco a mi hermana Diana Carolina con quien he compartido grandes momentos de felicidad, quien me ha tendido la mano apoyándome a lo largo de
mis estudios y en este proyecto aún a costa de mucho esfuerzo, mil gracias.
A mi hermanos José Marcos quien cada día me motiva a seguir adelante para ser de el un buen ejemplo.
A mis abuelos que en paz descansen quienes con su vida llena de nobleza me heredaron grandes experiencias.
A mis asesores Carlos Barroeta y Armando Martínez quienes me apoyaron en la realización de este proyecto.
III ÍNDICE TEMÁTICO
ÍNDICE DE FIGURAS VI
APENDICES IX
ÍNDICE DE TABLAS IX
Objetivo general ii
Objetivos específicos ii
Justificación ii
INTRODUCCIÓN 2
ANTECEDENTES 2
ESTRUCTURA DE LA TESIS 3
PLANTEAMIENTO DEL 4
PROBLEMA 4
Campo de aplicación 7
CAPITULO I 8
LA DOMOTICA Y LAS COMUNICACIÓNES 8
1.1 Domótica y casas inteligentes 9
1.1.1 El ahorro de energía 10
1.1.2 Comunicaciones 11
1.1.3 Seguridad 11
1.2 Definición de vivienda inteligente 12
1.3 Sistemas Domóticos 13
1.4 Técnicas de modulación usualmente usadas en dispositivos de comunicación para domótica 15
1.4.1 Modulación BPSK 15
1.4.1.2 Modulador BPSK 16
1.4.1.3 Demodulación BPSK 17
1.4.1.4 Espectro de la señal BPSK 18
1.4.2 Modulación QPSK 20
1.4.2.1 Modulador QPSK 20
1.4.2.2 Demodulador QPSK 23
1.4.3 Modulación OQPSK 27
1.4 Tecnologáias de comunicación utilizadas en domótica 29
1.4.1 Bus europeo de instalación (EIB) 29
1.4.1.1 Características del sistema EIB (Bus europeo de instalación) 29
1.4.1.2 Ventajas del sistema EIB 30
1.4.2 Protocolo X.10 30
1.4.3 Bluetooth 31
1.4.4 ZigBee 32
1.5 Comparativa general 33
CAPITULO II 34
ZIGBEE 34
2.1 Introducción a ZigBee 35
IV
2.2.1 IEEE 802.15.4 36
2.2.1.1 Capas del estándar IEEE 802.15.4 36
2.2.1.1.1 Nivel físico 36
2.2.1.1.1.1 Medidas de canal 38
2.2.1.1.2 Nivel de enlace de datos 41
2.2.1.2 Especificaciones del estándar IEEE 802.15.4 42
2.2.2 Niveles especificados por ZigBee Alliance 44
2.2.2.1 Nivel de red 44
2.2.2.2 Nivel de aplicación 44
2.3 Dispositivos ZigBee 45
2.4 Topologías de redes ZigBee 46
2.4.1 Topología en estrella 46
2.4.2 Topología en árbol 47
2.4.3 Topología en malla 48
2.5 Módulos ZigBee 49
2.5.1 eZ430-RF2480 Development Tool 49
2.5.2 ATMEL Module 51
2.5.3 EasyBee ZigBee 52
2.5.4 XBee Module 53
CAPITULO III 54
DISEÑO DEL SISTEMA DE COMUNICACIÓN 54
3.1 MODLO XBEE 55
3.1.2 Modos de operación 57
3.1.2.1 Modo recibir y transmitir 57
3.1.2.2 Modo de bajo consumo (Sleep Mode) 58
3.1.2.3 Modo de comandos 58
3.1.2.4 Modo transparente 59
3.1.2.5 Modo IDLE 59
3.2 Microcontroladores 59
3.2.1 Familias de microcontroladores 61
3.2.2 PIC 18F452 61
3.3 Pantalla de LCD de 4 x16 64
3.4 Teclado matricial de 4x4 65
3.5 Comunicación mediante C.I. MAX 232 66
3.6 MPLAB C18 67
3.7 Software X-CTU 68
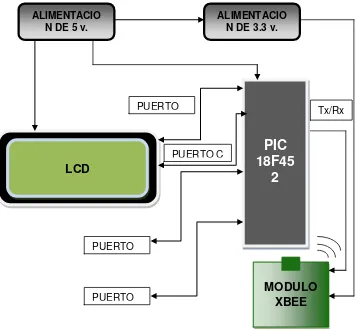
3.8 Componentes del coordinador 69
3.9 Diseño del sistema terminal inalambrico 1 70
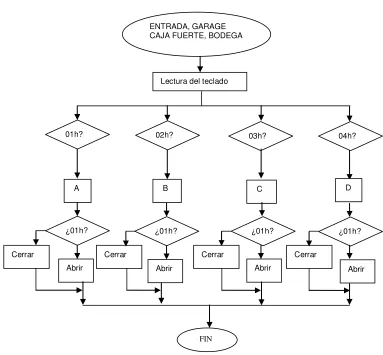
3.9.1 Diseño del programa para el primer microcontrolador 71
3.9.1.1 Lectura del teclado 71
3.9.1.2 Menú mostradopor la pantalla de LCD 73
3.10 Diseño del sistema terminal inalámbrico 2 75
3.11 Acoplamiento óptico entre un sistema digital y una etapa de potencia 80
V
CAPITULO IV 82
IMPLEMENTACIÓN DEL PROTOTIPO 82
4.1 Propuesta de implementación en una casa 83
4.2 Configuración de los modulos XBee 85
4.2.1 Configuracion con el software X-CTU 86
4.3 Componentes del sistema terminal 1 89
4.3.1 Configuración con el software XCT-U 92
4.4 Componentes del sistema terminal 2 93
4.4.1 Configuración con el software XCT-U 94
4.5 Componentes del acoplamiento óptico entre en sistema digital y la etapa de potencia 96
4.6 Manipulación de motores de C.A. con C.I. L293B 97
4.7 La transmision serial del PIC 18F452 98
4.8 Programación del primer microcontrolador 100
4.8.1 Control de accesos 101
4.8.2 Control de Ventilación 102
4.8.3 Monitoreo de temperatura 104
4.8.4 Control de iluminación 105
4.9 Programación del 2º microcontrolador 106
4.9.1 Monitoreo de temperatura 107
4.9.2 Control de ventilación e iluminacion 108
4.10 Desarrollo de la interfaz grfáfica 109
4.10.1 Descripción de la aplicación 109
4.10.2 Descripción de la interfaz gráfica 110
CAPITULO V 115
PRUEBAS Y RESULTADOS 115
5.1 Prueba del sistema terminal 1 116
5.2 Prueba del sistema terminal 2 121
5.3 Prueba del software 123
5.4 Rango de alcance 127
5.5 Muestra del estado de la ventilación e iluminación 129
CONCLUSIONES 130
ANEXO I: PROGRAMA DEL PRIMER MICROCONTROLADOR 132
ANEXO II: PROGRAMA DEL SEGUNDO MICROCONTROLADOR 139
ANEXO III: MANUALES DEL FABRICANTE 144
ANEXO IV: DISEÑO DE CIRCUITOS IMPRESOS 151
ANEXO V: ESTRUCTURA DE TRAMAS 153
VI ÍNDICE DE FIGURAS
Fig. A Dispositivos interconectados por medio de una red PAN. 6
Fig. B Distancias entre dispositivos dentro de una habitación respectivamente uno de otro. 7
CAPITULO I
Fig. 1.1 Modulación PSK: en la parte superior se observa la señal binaria de información
mientras que en la parte inferior la señal modulada BPSK. 16
Fig. 1. 2 Esquema de un Modulador BPSK 17
Fig. 1.3 Demodulador BPSK. 17
Fig. 1.4 Tren de pulsos binario. 18
Fig. 1.5 Espectro de Amplitud de una señal periódica de BPSK. 20
Fig. 1.6 Modulador QPSK. 21
Fig. 1.7 Diagrama de fasores para la modulación QPSK. 22
Fig. 1.8 Demodulador QPSK. 23
Fig. 1.9 Alineación de los bits con el retraso introducido en uno de los canales. 27
Fig. 1.10 Modulador OQPSK. 28
Fig. 1.11 Esquema de Conexión con EIB 29
CAPITULO II
Fig. 2.1 Tasa de error de bit contra relación señal a ruido en los estándares IEEE 802.15.4, IEEE
802.11 e IEEE 805.15.1. 38
Fig. 2.2 RSSI en ambientes internos 39
Fig. 2.3 RSSI en ambientes externos (derecha). 39
Fig. 2.4 PER en ambientes internos. 40
Fig. 2.5 PER para ambientes externos. 41
Fig. 2.6 Capas que controlan el estándar IEEE 802.15.4. 42
Fig. 2.7 Canales del estándar IEEE 802.1.4 42
Fig. 2.8 Capas del Protocolo Zigbee. 45
Fig. 2.9 Diagrama Red ZigBee con topología tipo estrella. 46
Fig. 2.10 Diagrama Red ZigBee con topología tipo árbol. 47
Fig. 2. 11 Diagrama. Red ZigBee con topología tipo malla. 48
Fig. 2.12 Transceiver CC2480 49
Fig. 2.13 eZ430-RF2480 Development Tool 50
Fig. 2.14 Modulo ATMEL 52
Fig. 2. 15 Modulo EasyBee ZigBee 52
Fig. 2.16 Modulos XBee de Maxstream 53
CAPITULO III
Fig. 3.1 Modos de operación de los modulos XBee 57
VII
Fig. 3.3 Esquema de conexión del PIC al LCD 64
Fig. 3.4 Teclado matricial 65
Fig. 3.5 Rebote generado al oprimir una tecla. 66
Fig. 3.6 Circuito integrado Max232 66
Fig. 3.7 Compilador MPLAB C18 67
Fig. 3.8 Software X-CTU, a la izquierda se encuentra la función de prueba de comunicación, a la
izquierda las opciones a configurar. 68
Fig. 3.9 Componentes de la interzaz con la computadora 69
Fig. 3.10 Diagrama a bloques del sistema terminal 1 70
Fig. 3.11 Diagra de flujo para detectar tecla oprimida en el teclado. 71
Fig. 3.12 Diagrama de flujo del menú principal mostrado por la pantalla de LCD 73
Fig. 3.13 Diagrama de flujo de la opción ACCESOS 74
Fig. 3.14 Diagrama de flujo para Entrada 74
Fig. 3.15 Diagramas de flujo para lectura de temperatura y control de la ventilación. 75
Fig. 3.16 Diagrama a bloques del sistema terminal 2. 76
Fig. 3.17 Diagrama de flijo para el encendido y apagado de lamparas. 77
Fig. 3.18 Diagrama de flijo para el encendido y apagado de lamparas. 77
Fig. 3.19 Diagramas de flujo para la recepción de temperatura y test de conectividad. 78
Fig. 3.20 Diagrama de flijo para el encendido y apagado de ventiladores. 79
Fig. 3.21 Diagrama de flijo para el encendido y apagado de lamparas. 79
Fig. 3.22 Configuración De Un Optoacoplador. 80
Fig. 3.23 Figura y simbolo de un TRIAC 81
Fig. 3.24 Diagrama esquemático para LM293B. 81
CAPITULO IV
Fig. 4.1 Plano de la casa propuesta para la implementación. 83
Fig. 4.2 Diseño en 3D de la Casa propuesta para la implementación. 84
Fig. 4.3 Diagrama esquematico para el coordinador y pruebas. 85
Fig. 4.4 Circuito Impreso del coordinador 86
Fig. 4.5 Captura en pantalla de la ventana principal del software XCT-U 86
Fig. 4.6 A la izquierda se muestra la caprura en pantlla de una comunicación exitosa, a la
derecha se muestra el resultado de una comunicación fallida. 87
Fig. 4.7 Configuracion del modulo central. 88
Fig. 4.8 Elementos configurados dentro de los modulos XBee 89
Fig. 4.9 Diagrama esquematico del nodo terminal 90
Fig. 4.10 Circuito Impreso del nodo terminal. 91
Fig. 4.11 Circuiti impreso del nodo terminal con todos sus componentes. 91
Fig. 4.12 Configuracion del modulo XBee del nodo terminal 1. 92
Fig. 4.13 Diagrama Esquematico del nodo terminal 2. 93
Fig. 4.14 Circuito impreso del nodo terminal 2. 94
Fig. 4.15 Configuracion del modulo XBee para el nodo terminal 2. 95
Fig. 4.16 Montaje Estándar Básico Con Lógica Digital Positiva. 96
Fig. 4.17 Circuito utilizado para la manipulación de elementos de C.A. 96
VIII
Fig. 4.19 Conexión al microcontrolador del L293B 97
Fig. 4.20 Se muestra la inicialización del modo de transmision serial. 98
Fig. 4.21 Captura en pantalla del codigo fuente y la declaración de las cadenas para el
despliegue del menu principal 100
Fig. 4.22 Sentencia Switch para la apertura y cierre de la entrada principal. 101
Fig. 4.23 Sentencia Switch para el encendido y apagado de la ventilación. 103
Fig. 4.24 Rutina de adrquisicion de datos de temperatura. 104
Fig. 4.25 Control de iluminación 105
Fig. 4.26 Cadenas mostradas en el menú del nodo terminal 2. 106
Fig. 4.27 Monitoreo de temperatura en el nodo terminal 2. 107
Fig. 4.28 Envio de datos para control de ventilación. 108
Fig. 4.29 Captura en pantalla de la interfaz gráfica 110
Fig. 4.30 Ventana para control de Iluminación 112
Fig. 4.31 Ventana para monitoreo de temperatura. 112
Fig. 4.32 Test de conectividad con los nodos terminales 113
Fig. 4.33 Ventana para el control de ventilación. 114
CAPITULO V
Fig. 5.1 Circuitos impresos de ambos nodos terminales con los dispositivos montados 116
Fig. 5.2 Menu principal del nodo terminal 1 117
Fig. 5.3 Contraseña para ingresar a alguno de los puntos de acceso. 117
Fig. 5.4 “u e ú para la op io ACCE“O“ . 118
Fig. 5.5 Seleccionar la apertura de algún acceso. 118
Fig. 5. 6 Seleccionar el cierre de algun acceso. 119
Fig. 5.7 Monitoreo de temperatura ambiental. 120
Fig. 5.8 Activar o desactivar la iluminación en un espacio. 120
Fig. 5.9 Nodo terminal 2 con todos sus elementos. 121
Fig. 5.10 Primer pantalla presentada por el nodo terminal 2. 122
Fig. 5.11 Pantalla presentada cuando es seleccionada la segunda opción del menú. 122
Fig. 5.12 Cierre de un acceso. 123
Fig. 5.13 Muestra del plano con la ubicación marcada en el lugar del cierre de la entrada principal. 124
Fig. 5. 14 La imagen muestra el estado de la entada principal y una ventana de alerta también indica la acción tomada. 124
Fig. 5.15 Muestra del plano en el cual se encuentra el acceso principal. 125
Fig. 5.16 Monitoreo de la temperatura por medio del software. 125
Fig. 5.17 Prueba de conectividad. 126
Fig. 5.18 Datos recibidos en las pruebas mediante el monitoreo de temperatura. 127
Fig. 5.19 Datos recibidos con algunos errores. 128
IX
APENDICES
Figura A Circuito impreso del sistema terminal 1 151
Figura B Circuito impreso del sistema terminal 2 151
Figura C Circuito impreso del nodo central 152
Figura D Estructura del paquete de la capa fisica IEEE 802.15.4 153
Figura E Estructura de la trama MAC 154
Figura F Formato de Trama de Datos 155
Figura G Formato de la Trama de Acuse de Recibo 156
Figura H Formato de Trama de Comando MAC 156
ÍNDICE DE TABLAS
CAPITULO I
Tabla 1.1 Comparativa general de diferentes tecnologías inalámbricas. 33
CAPITULO II
Tabla 2.1 Frecuencia de trabajo ZigBee 43
CAPITILO III
Tabla 3.1 Comparativa entre los dispositivos ZigBee en el mercado 56
Tabla 3.2 Familia de microcontroladores en el mercado 61
Tabla 3.3 Características del PIC18F45 63
Tabla 3.4 Pines de la LCD 64
Tabla 3.5 Asignación de código para filas del teclado 72
Tabla 3.6 Valores asignados a cada tecla y su equivalencia en ASCII 72
CAPITULO IV
Tabla 4.1 Caracteres utilizados para la inicialización de la transmisión de datos del modo serial 99
Tabla 4.2 Valores hexadecimales enviados para los accesos. 102
Tabla 4.3 Valores hexadecimales enviados para la ventilación. 102
Tabla 4.4 Valores correspondiestes al control de iluminación 106
ii
Objetivo general
Determinar los elementos necesarios para la implementación de un sistema de comunicación inalámbrica para el control y monitoreo de sensores o actuadores en una casa domótica.
Objetivos específicos
Investigar un sistema de comunicación inalámbrico que cuente con las características necesarias para la optimización al máximo de la energía
Seleccionar el protocolo de comunicación inalámbrico que mejor se adapte a las características de una vivienda media.
Implementar el sistema de comunicación utilizando dispositivos capaces de cubrir un área mínima y máxima respecto a los inmuebles donde estos puedan ser implementados.
Crear una interfaz grafica capaz de interactuar con el usuario con el mínimo de esfuerzo.
Justificación
La evolución de los sistemas de comunicación como en general de la electrónica se ha hecho a pasos gigantes, motivo por el cual su uso se extiende a muchos sectores para los cuales se han desarrollado protocolos capaces de satisfacer las necesidades particulares de éstos.
iii
Una de las principales necesidades que muchas personas buscan es el confort, la seguridad, el ahorro de energía y el control de todo su entorno, para esto se requiere evidentemente de toda una infraestructura de automatización y con ello un sistema que permita controlar toda esta tecnología con el menor esfuerzo, es decir que la forma de manejar todo no le represente una pérdida de tiempo.
Existen en el mercado actual tecnologías móviles que se prestan para su uso en domótica debido a sus características propias, una de estas tecnologías recibe el nombre de “ZigBee”, la cual se enfoca para aquellas aplicaciones que no requieren una alta tasa de transferencia, como lo es un sistema de comunicaciones capaz de transmitir señales de control para monitoreo de sensores y control de dispositivos.
El implementar un sistema domótico en una casa de tipo medio podría representar un gasto económico considerable, por lo que es de gran ganancia trabajar con tecnologías que sean de un costo bajo a lo mas que se pueda. ZigBee es una tecnología que ofrece esta posibilidad, ya que los dispositivos que se encuentran actualmente en el mercado tienen costos reducidos.
1
2
INTRODUCCIÓN
Pensado en un ámbito de tecnología en el hogar, se pretende hacer uso de las nuevas tecnologías con el fin de mejorar la calidad de vida mediante la comodidad que la tecnología ofrece. Para ello, se debe plantear desde un principio los objetivos que se pretenden alcanzar y los beneficios que con ellos queremos obtener.
Los sistemas de comunicación en el hogar son una herramienta que brinda confiabilidad a los usuarios ya que además se encargan de la seguridad. Los sistemas de seguridad también evolucionan cada día y su sistema de comunicación alambico ha sido paulatinamente sustituido por sistemas inalámbricos.
Respecto a la automatización, esta comienza en la industria aeronáutica y la automotriz, donde comenzaron a utilizar diversas automatizaciones con cierto grado de integración. Después siguieron los edificios comerciales y administrativos para finalmente ser las construcciones educacionales y viviendas los sitios en donde se pretendido introducir procesos cada vez más inclinados hacia la tecnología.
ANTECEDENTES
3 crearon tecnologías de comunicación tanto cableadas como inalámbricas con el fin de facilitar la interacción de dispositivos dentro de una vivienda.
Una de las desventajas de las tecnologías mencionadas era su alto costo que no era justificado, pues siempre se ha considerado como un lujo, es por eso que las tecnologías de comunicaciones con un enfoque dirigido a aplicaciones como la que se pretende en este trabajo no habían sido tan populares. En este trabajo se pretende hacer uso de una tecnología diferente que no necesite ser alambrada, esto con la principal meta de crear una aplicación más estética, eficiente y sobretodo económico.
ESTRUCTURA DE LA TESIS
La estructura de este trabajo de tesis contempla el siguiente temario:
Capítulo 1: Se hace énfasis de la teoría sobre la domótica y se da a conocer teóricamente elementos que forman parte de ella, asimismo se mencionan diversas tecnologías en comunicaciones que han sido utilizadas para la domótica,
Capitulo 2: En este capítulo se describe la forma en que trabaja la tecnología ZigBee así como sus características y funciones.
Capítulo 3: Aquí se expone el diseño del proyecto así como los diversos componentes que intervienen en él, desde como inicio el plan y así mismo todos los pasos que se siguieron hasta lograr los objetivos.
Capítulo 4: Se mencionan todos los pasos para llevar a cabo el diseño planteado en el capítulo anterior y se especifica la manera en la que se ha realizado tanto el hardware como el software.
4
PLANTEAMIENTO
DEL
5 Hoy en día la problemática de comunicaciones en el sector de la domótica se ha vuelto muy diversa debido a que el principal problema es el costo que genera la implementación de la tecnología necesaria para la implantación del sistema de comunicación que controle o monitoree cada una de las actividades del hogar, en gran medida el costo es generado por la necesidad de instaurar protocolos que ofrezcan seguridad y por la cantidad de energía que estos consumen, en base a esto se hace presente encontrar una tecnología y un protocolo capaces de tener un ultra bajo consumo de energía y de esta manera reducir los costos que esto genera. Una vez identificado el protocolo a trabajar será necesario aplicarlo a las necesidades que requiera una casa o edificio en cuanto a la transmisión de datos de control o de monitoreo de sensores.
La aplicación a desarrollar mediante el protocolo seleccionado deberá ser de utilidad para el sector domótica y deberá optimizar cada una de las tareas para los cuales se requiera el sistema de comunicación. A menudo los datos transmitidos necesitan ser observadas y analizadas por el ser humano, tales como temperatura, humedad, presencia en una habitación determinada , sobre todo cuando se trata de un sistema enfocado a seguridad, es por esto que se hace presente la necesidad de obtener una interfaz grafica que permita llevar a cabo la observación del estado de cada uno de los sensores monitoreados así como una simulación que permita emular las diferentes situaciones que podrían hacerse presentes dentro de un hogar o edificio.
6 de saber fácilmente cuando alguno tiene alguna falla además de poder tener diversos caminos por los cuales la información pueda viajar.
Fig. A Dispositivos interconectados por medio de una red PAN.
Debido a la gran diversidad que existe en cuanto al tamaño de la habitación a intercomunicar y así mismo la distancia entre las diferentes habitaciones, surge la necesidad de verificar si la tecnología a usar soporta satisfactoriamente la distancia de separación entre ellas, además de esto debe ser muy económico y no decrementar su potencia de manera considerable para poder realizar el envío y recepción de datos.
La distancia de separación entre cada uno de los dispositivos que se utilicen debe cubrir al menos 30 metros en interiores para garantizar el envío y recepción de los datos, para lo cual se ha establecido que una habitación promedio nunca excede de un volumen máximo de 25 metros cuadrados, es por esto que se pretende encontrar una tecnología que cumpla con las expectativas.
7 Fig. B Distancias entre dispositivos dentro de una habitación respectivamente uno de otro.
Campo de aplicación
El campo de aplicación comprende las instalaciones de aquellos sistemas que realizan una función de automatización para diversos fines, como gestión de la energía, control y accionamiento de receptores de forma centralizada o remota, sistemas de emergencia y seguridad en edificios, entre otros, con excepción de aquellos sistemas independientes e instalados como tales, que puedan ser considerados en su conjunto como aparatos, por ejemplo, los sistemas automáticos de elevación de puertas, persianas, toldos, cierres comerciales, sistemas de regulación de climatización, redes privadas independientes para transmisión de datos exclusivamente y otros aparatos.
8
CAPITULO I
9
1.1 Domótica y casas inteligentes
Una de las principales necesidades del ser humano es la vivienda, debido a esto todo el tiempo hay una constante búsqueda de un hogar que asegure la comodidad, el confort y seguridad y así lograr la optimización de las tareas de la casa ha sido siempre una de las búsquedas del hombre. Este conjunto de necesidades han llevado al ser humano a una constante búsqueda tecnológica que cubra cada una de estas exigencias y es así como se ha llevado a la invención de múltiples aparatos eléctricos y electrónicos para el hogar.
Todos los aparatos que forman parte de nuestra vida cotidiana en algunos casos son demasiados y debido al ritmo de vida actual las personas deben llevar una vida más organizada para poder solventar todas sus ocupaciones y ahorrar lo más posible tiempos. En la antigüedad las personas dedicaban tiempo a tareas que hoy en día no toman tiempo y pueden efectuarse en tan solo unos minutos, esto da como resultado final tiempo libre para realizas otro tipo de acciones, y esto continuamente se transforma en un ciclo en el cual el ser humano busca obtener más tiempo.
Es evidente la evolución de la sociedad a las nuevas tendencias que marcan una necesidad imponente de una gama de soluciones a problemas relacionados con actividades simples pero que las personas consideran por su misma simplicidad que estas ocupen lo menos posible de su tiempo.
10 sector de las comunicaciones ha enfocado aplicaciones enfocados para su uso domestico.
Dentro de toda esta nueva gama de tecnologías enfocadas al uso domestico surge un nuevo concepto denominado “casa inteligente” el cual engloba en concreto cuatro grandes áreas: la electrónica, la informática, la arquitectura y las telecomunicaciones. Un concepto que está íntimamente relacionado con la tecnología enfocada al hogar, es conocido como “Domótica”, cuya etimología nos dice el significado concreto de esta palabra, por un lado “domus” que significa casa, por otro lado se hace una relación entre este término y la palabra “informática”, esto significa que el termino. Domótica” hace referencia a todo un conjunto de tecnologías informáticas y de comunicaciones que permiten automatizar y gestionar diferentes aplicaciones dentro de una instalación de tipo domestico con el fin de proporcionar una mejor calidad de vida a las personas.
La domótica surge primeramente con la iniciativa de lograr realizar tareas concretamente de automatización con el objetivo de reducir el trabajo humano y facilitar la realización de distintas tareas, sin embargo estas tareas en principio solo habían representado más gastos a quienes implementaban estas nuevas soluciones, y es en parte por esta razón que el desarrollo de aplicaciones a la domótica se ha realizado de una manera lenta, en la actualidad han surgido aplicaciones que buscan además de lo anterior, lograr realizar acciones que permitan justificar o retribuir de alguna manera el gasto generado de la instalación de todos los artefactos utilizados en la aplicación de nuevos procesos. Los campos que la domótica cubre actualmente son: ahorro de energía, comunicaciones, seguridad.
1.1.1 El ahorro de energía
11 detección de presencia, la desconexión automática de dispositivos cuando estos no se usan, todo esto aunado con la construcción de dispositivos con un bajo consumo de energía constituyen una parte de las características que se pretenden actualmente en el sector domótica, todo esto con la meta de ahorrar gastos generados a causa del consumo energético y que puede resultar a mediano y largo plazo un ahorro muy significativo .
1.1.2 Comunicaciones
En este sector la domótica juega un papel de tipo estratégico ya que sirve como un vinculo con aplicaciones que posiblemente generen gastos en recursos humanos o en tiempo, tal es el caso del mano a distancia de diversos servicios como alarmas, control de acceso, activación de válvulas hidráulicas, etc., algunas de las actividades que se requieren realizar implican gastos significativos respecto al tiempo en que estas se ejecutan. Dicho problema se resuelve con un buen sistema de comunicación enfocado a estas necesidades.
En domótica, todos los servicios tienen que estar comunicados entre sí, basado en redes de comunicación esto con el fin de asegurar premisas tales como seguridad, confort y comunicación en la vivienda. Un sistema que es destinado a ser utilizado por la Domótica, tienen sus bases de funcionamiento en tres objetivos particulares: ahorro de energía, confort y seguridad.
1.1.3 Seguridad
12 las principales son aquellas que requieren de cuidados especiales ya que por su naturaleza podrían resultar peligrosas si son mal manipuladas, o bien la seguridad pone especial atención a el monitoreo de sensores cuya actividad denota peligro de cualquier índole. La seguridad en Domótica debe contar entre otros: alarmas de gas, alarmas de humo, alarmas de fuego, sensores de movimiento, alarmas policíacas y alarmas de tipo médicas.
1.2 Definición de vivienda inteligente
Este concepto engloba todas aquellas acciones que se realizan comúnmente en el hogar tales como encender las luces, la climatización, el audio, la TV, sistemas de riego, sistemas de seguridad domestica, entre otras muchas tareas. El tema principal de las viviendas inteligentes es la automatización y control de todos estos servicios de manera inalámbrica. Sin embargo en general todo esto gira en torno a una sola tarea general que es: la realización con bajo esfuerzo humano, es decir, se trata de hacer por medio de las diferentes tecnologías el trabajo que el ser humano podría hacer.
Un proyecto de casa inteligente puede ser similar a una actividad como la decoración de la misma, uno mismo puede comenzar desde lo más básico y posteriormente agregar más adaptaciones de acuerdo con las necesidades que se tengan o vayan surgiendo así mismo de acuerdo al presupuesto que se tenga.
Las principales ventajas en general de una vivienda inteligente son:
Confort: Al permitir al usuario tener el control de dispositivos del hogar de manera remota o el programar todas las actividades para que estas se realicen de manera automática, es un beneficio que permitirá realizar tareas de manera fácil y sobre todo el tiempo podrá ser aprovechado para realizar otras tareas.
13 los cuales se busca siempre ahorrar para que de manera consecuente el gasto en dinero disminuya. Además de lo anterior mediante este beneficio es posible que a mediano o largo plazo sea más rentable hacer uso de un sistema domótico.
Economía: Un sistema de este tipo puede implementarse de manera gradual, y es por esto que puede adaptarse a las necesidades especificas que se tengan, por lo que de este modo se evita tener recursos innecesarios que implican un gasto mayor, además del ahorro de energía que nos permite obtener constantes ahorros en cuanto a recursos económicos.
Seguridad: Uno de los aspectos primordiales que se buscan en todos los hogares y por supuesto edificios ya que permiten tener el control total de la vivienda de manera remota haciendo más fácil la manipulación de un sistema de seguridad, y sobre todo ahorra tiempos al permitir una inspección de todo el lugar sin tener que ir hasta el físicamente.
1.3 Sistemas Domóticos
Los sistemas domóticos poseen una serie de características que los hace diferentes de otros tipos de sistemas informáticos. En un sistema domótico, la interacción con el entorno físico del sistema, es un factor muy importante. En el desarrollo de estos sistemas es necesario establecer mecanismos, para que éste pueda extraer información del entorno y realizar acciones sobre él. Debido a esto, en el sistema domótico existirán dispositivos que no serán computadoras lo cual no es habitual en otros tipos de sistemas informáticos, como pueden ser las aplicaciones de gestión o los sistemas puramente informáticos.
14 rasgos un recinto con entorno inteligente posee dos sistemas principales, los cuales deben de trabajar de manera conjunta: El sistema de administración de toda la casa y el sistema para la administración de habitaciones.
A) Sistemas de administración de toda la casa: Contempla los sistemas de gestión y control propios de la casa y de las prestaciones indirectas que la mismo facilita a los usuarios, entre ellas:
Control ambiental: alumbrado.
Control energético.
Seguridad: Circuito Cerrado de Televisión, alarmas de incendio e intrusos.
Control de acceso: personas o visitantes.
Sistema de altavoces-sonido.
Control de sensores.
Control de motores.
B) Sistema para la administración de habitaciones: En este caso se incluyen los elementos necesarios para una adecuada automatización del ambiente individual, ya sea por prestación directa al usuario o bien teniendo una instalación lo suficientemente flexible y amplia, para que el usuario pueda instalar sus propios equipos con posibilidades de interconexión, entre ellas:
Control de alarmas: Permite gestionar las operaciones relacionadas por las distintas clases de indicadores.
Vigilancia de intrusos: Se trata de identificar la presencia de personas en recintos no autorizados y avisar en el momento en que se detecte.
15 trabajadores, etc., incluyendo la grabación de las imágenes que tome la cámara. Esta activación podrá realizarse de manera manual en el momento que el cliente lo crea conveniente, mediante señales de alarmas, o podrá programarse para que se lleve a cabo en lapsos de tiempo determinados por el usuario.
Un punto considerado relevante e innerente a los sistemas anteriores, es lo referente a las soluciones de automatización, entre las principales podemos citar las siguientes:
Actuacion remota sobre dispositivos: encendido de boma de agua, desactivacion selectiva de cargas, sistemas de riego, iluminacion, persinas, etc
Alarmas por eventos: deteccion y envio de mensajes por alarmas.
Programacion de automecanismos: inicio programado de riego, control automatico temporizado de persianas, etc. [1]
1.4 Técnicas de modulación usualmente usadas en dispositivos de comunicación para domótica
Dentro del ambiente de comunicaciones en el ambiente domótico se requiere enviar datos entre transmisor y receptor, dichos datos son manejados de forma digital para su fácil procesamiento mediante computadoras, microcontroladores o microprocesadores, debido a lo anterior se hace uso de técnicas de modulación digital. En los siguientes puntos se explicara la forma en que trabajan las técnicas de modulación PSK (BPSK, QPSK y OQPSK), las cuales son utilizadas en dispositivos de transmisión inalámbrica con aplicaciones en domótica incluyendo la tecnología presentada en este trabajo.
1.4.1 Modulación BPSK
16 la señal analógica modulada va a tener una u otra fase de salida. Para ejemplificar esta forma de modulación se considera que la señal de información a transmitir es una señal binaria con niveles de tensión de +1v. Asimismo la señal portadora:
Fig. 1.1 Modulación PSK: en la parte superior se observa la señal binaria de información mientras que en la parte inferior la señal modulada BPSK.
La función para la señal que es modulada mediante la técnica BPSK se defino como:
Cuando la entrada al modulador corresponde a un 0 lógico, la fase absoluta de salida para la señal BPSK es 180º. Si la entrada es un 1 lógico entonces la fase de salida va a ser 0º, como se muestra en la figura.
1.4.1.2 Modulador BPSK
17 consta de un filtro pasa banda que elimina los armónicos que no son significativos para la señal BPSK, lo anterior con la finalidad de no interferir con otro tipo de señales que puedan transmitirse por el mismo canal.
Fig. 1. 2 Esquema de un Modulador BPSK
1.4.1.3 Demodulación BPSK
En la figura siguiente se muestra un demodulador BPSK de detección síncrona. El recuperador de la señal portadora es un circuito que se encarga de obtener la señal BPSK recibida.
Fig. 1.3 Demodulador BPSK.
La demodulación de una señal BPSK se puede representar de la siguiente forma:
Las dos posibles entradas analógicas para este demodulador son:
.
Para el proceso para obtener la señal digital original es: Modulador
Balanceado Filtro paso banda Señal
binaria
g1(t) g2(t)
Recuperador de la Portadora.
Modulador
18 (1.1)
(1.2)
Para el proceso para obtener la señal digital original es:
(1.3)
(1.4)
1.4.1.4 Espectro de la señal BPSK
Para ejemplificar el espectro de una señal BPSK se tomara para análisis que la señal digita es una señal periódica por lo que tiene una anchura de bit constante Tb=T/2 y niveles de tensión +A. Esto con el fin de ejemplificar una señal donde nunca se mantenga contante la información.
Fig. 1.4 Tren de pulsos binario.
La función y transformada de Fourier de este tren de pulsos es el siguiente:
19 (1.6)
La función de la señal modulada BPSK es:
(1.7)
Por lo tanto la transformada de Fourier es la siguiente:
(1.8)
Aplicando la propiedad de translación en la frecuencia a la ecuación anterior tenemos:
=
− − ( + ) (1.9)
20 − − ( + ) (1.10)
De esta forma el espectro de una señal BPSK se representa como se muestra en la figura:
Fig. 1.5 Espectro de Amplitud de una señal periódica de BPSK.
1.4.2 Modulación QPSK
Quaternary Phase Shift Seying, como se deduce su nombre, es un tipo de modulación MPSK en la que M=4 , esto significa que la señal portadora de frecuencia puede tener 4 fases de salida diferentes, esto trae como consecuencia k=2 , entonces en el esquema de modulación QPSK , los datos de entrada binarios están compuestos por grupos de 2 bits que reciben el nombre de dibits y que producen 4 posibles
combinaciones: 00,01,10 y 11.
1.4.2.1 Modulador QPSK
21 CANAL I
CANAL Q
Fig. 1.6 Modulador QPSK.
En un modulador QPSK se distinguen dos canales, CANAL I y CANAL Q, cada uno de ellos conducirá uno de los bits desde el convertidor serie-paralelo a du modulador balanceado correspondiente, cabe destacar que un modulador balanceado opera igual que un multiplicador analógico. El bit I, cuyo nivel de tensión puede ser de +1 o -1 v, es multiplicado por la señal portadora desplazada en fase 90º, es decir . A la salida de los dos moduladores balanceados se tiene una suma lineal para obtener así la señal QPSK.
El filtro pasa banda que es colocado a la salida del modulador QPSK lo que hace es eliminar los armónicos que no son significativos de la señal modulada para no interferir con otras señales que pudieran transmitirse por el mismo canal.
Convertidor Serie/Paralelo
Q I
Modulador Balanceado
Oscilador Generador de portadora
( )
Desplazador de fase de 90º
Modulador Balanceado
Sumador
22 Los valores que puede tomar la señal de salida son:
Entrada binaria Fase de salida de la
señal QPSK
Q I
0 0 -135º
0 1 -45º
1 0 +135º
1 1 +45º
Su diagrama de fasores se muestra a continuación:
Fig. 1.7 Diagrama de fasores para la modulación QPSK.
En la modulación QPSK, como se puede observar en la figura, la separación angular entre fases de salida adyacentes es de 90º. Además para este modulador, cada dibit difiere del adyacente en un solo bit. Este sistema de codificación recibe el nombre de Código Gray.
90º Q
I 1 0
Q I 1 1
Q I 0 0
23 CANAL I
CANAL Q
1.4.2.2 Demodulador QPSK
En la figura 1.8 se muestra el demodulador QPSK. El separador de potencia triplica la señal recibida sin que este procedimiento tenga como consecuencia la perdida de potencia, conduciéndola por el calan I y el canal Q hasta los multiplicadores analógicos. En el circuito recuperador de portadora se obtiene la portadora a partir de la señal de QPSK. Las salidas de los multiplicadores analógicos se hacen pasar por dos filtros de paso de bajas que tienen que tener una frecuencia de corte menor que .
Fig. 1.8 Demodulador QPSK.
De forma matemática el proceso para la demodulación QPSK para los posibles dibits que se pueden transmitir es el siguiente:
QI=00 para este dibit la señal analógica es la siguiente:
. (1.11)
Separador
de Potencia. portadora Recuperador de la .
Desplazador de fase de 90º.
Filtro pasa bajos. Filtro pasa
bajos.
Convertidor Serie/Paralelo
24 Si analizamos por el canal Q se obtiene:
(1.12)
Para el canal I:
(1.13)
QI=01 para este dibit la señal analógica es la siguiente:
(1.14) Si analizamos por el canal Q se obtiene:
25
Para el canal I:
(1.16)
QI=10 para este dibit la señal analógica es la siguiente:
. (1.17) Primeramente se analiza para el canal Q:
(1.18)
Para el canal I:
26
QI=11 para este dibit la señal analógica es la siguiente:
. (1.20)
Primeramente se analiza para el canal Q:
(1.21)
Para el canal I:
27
1.4.3 Modulación OQPSK
La modulación OQPSK es similar a la modulación QPSK de pulsos rectangulares, en la que se ha limitado la máxima variación de fase instantánea. Así como en la modulación QPSK se llegan a producir saltos de rad. entre dos símbolos consecutivos, en la modulación OQPSK dichos saltos de fase instantánea se reducen a la mitad rad, de este modo se evita que la componente en fase y la componente en cuadratura cambien simultáneamente su signo.
La limitación del máximo salto de fase instantáneo es útil cuando la señal se amplifica mediante amplificadores de alta potencia. Para evitar que ambas componentes cambien de signo simultáneamente en el transmisor, la componente en cuadratura se retarda temporalmente un tiempo equivalente a medio periodo de símbolo T/2 y posteriormente en recepción con un filtro pasa bajo, se retarda la componente en fase temporalmente un tiempo equivalente a medio periodo de símbolo T/2, de este modo, quedan de nuevo las dos componentes sincronizadas.
Se puede definir como un caso particular de la modulación QPSK en donde uno de los bits ya se ale canal Q o el canal I se retrasa medio periodo de bit (Tb/2) respecto al bit del otro canal. En la figura se muestra un ejemplo en el que el bit de información del canal I es retrasado un tiempo Tb/2 respecto al bit del canal Q.
28 De acuerdo a la diferencia que se presenta en la figura anterior se modifica también la forma en la que trabaja un modulador OQPSK respecto del QPSK convencional. Para este caso se presenta un latch de retraso en uno de los dos canales:
Fig. 1.10 Modulador OQPSK.
29
1.4 Tecnologáias de comunicación utilizadas en domótica
1.4.1 Bus europeo de instalación (EIB)
Las instalaciones eléctricas con este protocolo son casi como las instalaciones tradicionales, sólo que el usuario utiliza unos interruptores para encender y apagar las luces de su hogar. A los métodos con este esquema de conexión se le llaman Sistemas de control distribuidos en red.
Fig.1.11 Esquema de Conexión con EIB (Bus europeo de instalación).
1.4.1.1 Características del sistema EIB (Bus europeo de instalación)
Los elementos del EIB pueden comunicarse entre sí, sin importar el fabricante del elemento.
Las señales recibidas por el sensor se envían al actuador correspondiente por la línea del bus, que es un cable de dos hilos.
30
Su estructura puede ser lineal, de estrella o con ramificaciones, sin necesidad de un control central.
1.4.1.2 Ventajas del sistema EIB
Ahorro de tiempo: Los tiempos de montaje del sistema pueden reducirse debido a una planificación e instalación adecuada, con la ayuda de un software y con la reducción de la cantidad de cables, el montaje es mucho más fácil.
Flexibilidad: Es posible la ampliación o modificación de funciones gracias a la reprogramación de los actuadores y sensores, incluso ampliando la instalación existente.
Eficiencia en la comunicación: Los componentes del sistema son compatibles entre sí, creando una comunicación sin problemas o interferencias. Esto garantiza la utilización racional de la energía.
Respeto por el medio ambiente: Al aprovecharse al máximo la energía, el sistema brinda un alto grado de efectividad y mejora el manejo de los recursos existentes, repercutiendo en ahorro de dinero.[2]
1.4.2 Protocolo X.10
X.10 permite controlar los aparatos electrodomésticos y las luces de la vivienda, haciendo uso de la instalación eléctrica ya presente en el hogar, evitando la instalación de cables. Cada aparato posee una dirección a la que responde o envía información, contando con un total de 256 direcciones.
31 elaborar una sencilla instalación domótica. El empleo de X.10 no requiere cableado especial, pero si se requieren dos dispositivos para la comunicación:
Un receptor: Se instala para enchufar algún electrodoméstico. En él se especifica el código de la unidad y el código de la vivienda, ofreciendo un gran número de posibilidades.
Un controlador o transmisor: Emite las órdenes de cuándo deben activarse los aparatos electrodomésticos y con qué intensidad, encontrándose estos en cualquier otro lugar de la vivienda.
X.10 protege efectivamente la vivienda porque monitorea constantemente el estado de la casa, ya sea en el lugar o a distancia. Se encarga de encender las luces cuando se requiere, activa el sistema de alarmas si es requerido también, incorporando también a sus beneficios el empleo de un guardián electrónico, llamado “perro electrónico” X.10, un módulo que imita los ladridos de un perro Pastor Alemán [2].
1.4.3 Bluetooth
Bluetooth aparece en el año de 1998 como una norma desarrollada por un grupo de empresas con el objetivo optimizar la comunicación inalámbrica mediante radiofrecuencia entre dispositivos de uso domestico como por ejemplo: computadoras, PDAs, teléfonos celulares, impresoras etc. Esta tecnología puede abastecer hasta 8 dispositivos en una sola WPAN (Wireless Personal Area Network).
Bluetooth opera en la banda de 2,56 GHz y ofrece hasta 1Mbps, que se reducen a un aproximado de 434 Kbps al descontar la sobrecarga de los protocolos. El alcance máximo es de entre 10 y 100 metros, aunque los resultados obtenidos de manera efectiva son diferentes ya que intervienen factores externos como el ruido electromagnético y los obstáculos.
32
Una soporta un máximo de 8 nodos dentro una subred Bluetooth.
Bluetooth maneja una velocidad de intercambio de hasta 1Mbps.
Frecuencia de 2.4 GHz.
Potencia de transmisión: 1mW para 10 metros, 100mW para 100 metros.
Canales máximos de datos: 7 por subred.
Velocidad de datos: 721 Kbps por subred.
Cobertura: 10 Metros.
Bajo consumo de energía: 2.7 Volts. [3]
1.4.4 ZigBee
Las redes ZigBee comenzaron a ser concebidas por el año 1998, el organismo encargado del desarrollo es la ZigBee Alliance cuyo afán era diseñar redes ad-hoc de auto organización para radios digitales así como programas de certificación, insignias y estrategias de comercialización.
El enfoque principal fue desarrollar dispositivos para aplicaciones diferentes, las cuales proveerán al usuario soluciones inalámbricas que son rentables, fáciles de utilizar, altamente confiables y seguras. ZigBee ha sido diseñado para soportar una diversa gama de aplicaciones con conectividad más sofisticada que los anteriores sistemas inalámbricos. Se enfoca un segmento del mercado no atendido por los estándares existentes, con baja tasa de transmisión de datos, bajo ciclo de servicio de conectividad y bajo costo. Las principales características de esta tecnología son:
Bajo costo en los dispositivos, la instalación y el mantenimiento.
Los dispositivos ZigBee amplían la vida de las baterías ya que la naturaleza de ZigBee permite la creación de redes que requieren poco mantenimiento.
33
1.5 Comparativa general
Una vez analizados los distintos medios de transmisión aplicables en Domótica se presenta un panorama de las diversas ventajas y desventajas que pueden tenerse al utilizar cualquiera de ellos, sin embargo cada uno de ellos es apto para necesidades diferentes, para el caso particular de este trabajo es prioritario encontrar una tecnología que consuma muy pocos recursos tanto económicos como en materia de energía. A continuación se presenta una comparativa general de las tecnologías antes mencionadas.
Tabla 1.1 Comparativa general de diferentes tecnologías inalámbricas.
EIB X.10 BLUETOOTH ZIGBEE
Ancho de
banda 12-96 Mbps 60bps 1Mbps 20 – 250kbps
Aplicaciones Automatización y Sistemas de control. Control remoto de dispositivos eléctricos Reemplazo de cable Monitorización y control Consumo
energético alto Alto Medio Bajo
Puntos importantes Robustez, Seguridad, alta velocidad d transmisión. Empleo de un guardián electrónico Costo, seguridad Consumo, costo, robustez, seguridad Complejidad
Media Alta Media - alta Baja
Distancia
34
CAPITULO II
35
2.1 Introducción a ZigBee
Las tecnologías inalámbricas si bien pudiesen tener algunas desventajas en cuanto al ancho de banda se refiere respecto a tecnologías alambicas , poseen múltiples ventajas en el ámbito de la domótica debito en primer lugar a el ahorro de toda la infraestructura que se requiere para una instalación alámbrica que para el caso práctico y estético no es muy conveniente ya que en domótica uno de los puntos que más sobresaltan a la vista es la estética y como en todo también el costo resulta importante.
ZigBee es una tecnología que se presta para esto ya que el estándar se ha hecho a medida para la monitorización y para tareas de control. Por este motivo, los mercados tales como la automatización de edificios y hogares, la atención sanitaria, control industrial, control de alumbrado y control comercial, son las principales áreas bajo las cuales trabaja la tecnología en cuestión.
2.2 Arquitectura
ZigBee es una tecnología que basa su funcionamiento en el modelo de referencia OSI (Open System Interconection) y como tal también divide su arquitectura en capas que definen su funcionamiento, Sien embargo para el caso de las capas de ZigBee encontraremos una división entre los protocolos encargados de definir dichas capas, por una parte se encuentra presente la norma IEEE 802.15.4 y por otro lado se encuentran las normas dictadas por la ZigBee Alliance.
36
2.2.1 IEEE 802.15.4
ZigBee es una tecnología que está basada en el estándar IEEE 802.15.4 que está enfocado para conexiones inalámbricas de tipo personal PAN con una tasa de transferencia baja como es el caso de la tecnología de la que se hace uso para la realización de este trabajo. Para poder estudiar la tecnología ZigBee, será necesario tratar los niveles definidos por el estándar IEEE 802.15.4 específico para conexiones inalámbricas tales como ZigBee y bajo la cual esta se basa.
IEEE 802.15.4es una norma bajo la cual se define la especificación de ZigBee. La finalidad del estándar IEEE 802.15.4 es definir los niveles de red básicos para dar servicio a un tipo en particular de red inalámbrica de área personal (WPAN) centrada para constituir la comunicación entre dispositivos con un bajo costo y baja velocidad. Se hace énfasis en el bajo precio de los módulos de comunicación y su fácil reconocimiento con nodos cercanos y sin infraestructura, o con muy poca, así mismo con esto se favorece al máximo el bajo consumo de recursos materiales y por lo tanto económicos.
2.2.1.1 Capas del estándar IEEE 802.15.4
La capa de más bajo nivel es la capa física (PHY), que en conjunto con la capa de acceso al medio (MAC), brindan los servicios de transmisión de datos por el aire, punto a punto. Estas dos capas esta descritas dentro del estándar IEEE 802.15.4. El estándar trabaja sobre las bandas ISM de uso no regulado, dónde se definen hasta 16 canales en el rango de 2.4 GHz, cada una de ellas con un ancho de banda de 5 MHz
2.2.1.1.1 Nivel físico
37 transceptores trabajan bajo una de los tres rangos de frecuencias ya anteriormente mencionados:
De 868 a 868.8 MHz: Europa. Se permite de uno a tres canales.
De 902 a 928 MHz: Norte América. Se permite de diez a treinta canales.
De 2400 a 2483.5 MHz: Uso en todo el mundo. Se permite hasta dieciséis canales.
La IEEE 802.15.4 maneja dos modos diferentes de modulación y así mismo puede manejar dos diferentes versiones para el nivel físico (PHY). La primer versión es denominada PHY a 868/915 MHz y es conocida como la versión PHY de banda baja, esta versión utiliza modulación por desplazamiento de fase binaria (BPSK) .La segunda versión PHY a 2.4 GHz es conocida como Banda alta y utiliza una técnica de modulación llamada OQPSK por sus siglas en ingles “Offset Quadrature Phase-Shift Keying”.
38 Fig. 2.1 Tasa de error de bit contra relación señal a ruido en los estándares IEEE 802.15.4, IEEE 802.11
e IEEE 805.15.1.
2.2.1.1.1.1 Medidas de canal
39 Fig. 2.2 RSSI en ambientes internos
40 La grafica de la figura 2.4 muestra una relación entre la intensidad de la señal recibida y la distancia, en este caso a diferencia de la respuesta que se obtiene en ambientes internos, la señal decae más rápidamente sin embargo a partir de los 30 metros la intensidad de la señal es más constante.
El segundo parámetro al cual se hace referencia en el estándar IEEE 802.15.4 es la tasa de error de paquete PER, ese parámetro también es manejado en función de la distancia, el estándar indica que la tasa de error para el caso de ambientes externos se dispara cuando se rebasa la distancia de 20 metros siendo probable después de esta distancia la detección de errores. El panorama es diferente cuando se trabaja en ambientes externos ya que haya los 20 metros la probabilidad de error es muy baja y es hasta los 50 metros donde esta comienza a elevarse [5].
41 Fig. 2.5 PER para ambientes externos.
2.2.1.1.2 Nivel de enlace de datos
En este nivel encontramos la subcapa de Control de Acceso al Medio (MAC). Ésta se encarga de transmitir tramas MAC. Además del servicio de datos, ofrece una interfaz de control y regula el acceso al canal físico y al balizado de la red. También se encarga de controlar la validación de tramas y las asociaciones entre nodos tiempo. Por último, ofrece puntos de enganche para servicios seguros.
42
IEEE 802.15.4
Fig. 2.6 Capas que controlan el estándar IEEE 802.15.4.
2.2.1.2 Especificaciones del estándar IEEE 802.15.4
El medio de transmisión ZigBee trabaja sobre la banda ISM en concreto se definen algunas frecuencias dedicadas a su uso, 915 MHz para su uso en Estados Unidos de Norteamérica, 868 MHz para Europa y 2.4 GHz para el resto del mundo, la razón es que esta última es libre en gran parte del mundo y por este motivo las empresas dedicadas a su desarrollo optan por utilizar esta frecuencia. Para el caso de 2.4 GHz se definen 26 canales y cada uno de ellos los posee un ancho de banda especifico de 5 MHz.
Fig. 2.7 Canales del estándar IEEE 802.1.4
NIVEL FÍSICO
ENLACE DE DATOS
CONTROL DE ACCESO AL MEDIO SUBNIVEL DE CONVERGENCIA
43
Tres bandas, 27 canales especificados:
Tabla 2.1 Frecuencia de trabajo ZigBee
FRECUENCIA COVERTURA TRANSFERENCIA DE DATOS
NUMRO DE CANALES
SENSIBILIDAD DE RECEPCION
MODULACION 2405-24800
MHz
RESTO DEL
MUNDO 250 Kbps 16 -85 dBm O-QPSK
868.3 A 870
MHz EUROPA 20 Kbps 1 -92 dBm BPSK 902-828 MHz AMÉRICA 40 Kbps 10 -92 dBm BPSK
2.4Ghz.- Especificaciones (Disponibles mundialmente):
a) Sensibilidad: -85 dBm @ 1%PER b) Potencia de salida: 0dB
c) Alcance: Interiores (30m), exteriores libres (75m)
Características de la comunicación:
a) Estructura simple.
b) Entrega de datos segura ya que se hace uso de :
CSMA/CA (Acceso Múltiple con Detección de Portadora – Prevención de colisión).
44
2.2.2 Niveles especificados por ZigBee Alliance
2.2.2.1 Nivel de red
Las funciones principales del nivel de red son dar paso al correcto uso del Subnivel MAC, definido anteriormente por el estándar IEEE 802.15.4, así como ofrecer una interfaz ajustada para su uso por parte del nivel superior, el nivel de aplicación.
Por una parte, se realiza el ruteo en base a la topología de la red en la que el dispositivo se encuentra. Por otra parte, las funciones de control del nivel de red controlan la configuración de nuevos dispositivos y el establecimiento de nuevas redes; puede decidir si un dispositivo colindante pertenece a la red e identifica nuevos routers y vecinos. El control puede detectar así mismo la presencia de receptores, lo que posibilita la comunicación directa y la sincronización a nivel MAC.
2.2.2.2 Nivel de aplicación
45
ZIGBEE
IEEE 802.15.4
NIVEL DE APLICACIÓN
Fig. 2.8 Capas del Protocolo Zigbee.
2.3 Dispositivos ZigBee
Dentro de una red constituida por esta tecnología se pueden encontrar tres tipos de dispositivos diferentes que cumplen con funciones diferentes de acuerdo a la posición en que se encuentran dentro de una red, dichos dispositivos son los que a continuación se mencionan:
Coordinador ZigBee ZC (ZigBee Coordinator): Este dispositivo es el que tiene más funciones dentro de una red ZigBee ya que entre sus funciones se encuentra controlar y coordinar la red y las diferentes rutas que deben de seguir cada uno de los dispositivos para comunicarse entre ellos, para poder constituir una red ZigBee es forzosamente necesario tener por lo menos un Coordinador.
NIVEL DE RED
SUBCAPA DE APOYO A LA APLICACIÓN
SERVICIO DE SEGURIDAD
OBJETOS DE APLICACIÓN
OBJETO DE DISPOSITIVO
ZIGBEE
CONTROL DE ACCESO AL MEDIO (MAC)
46
Router ZigBee (ZigBee Router, ZR): Este dispositivo tiene como meta principal la interconexión de cada uno de los dispositivos que se encuentren separados dentro de una topología de red del mismo modo este dispositivo ofrece la posibilidad de obtener un nivel de aplicación para la ejecución de código por parte de los usuarios.
Dispositivo Final (ZigBee End Device, ZED): Este tercer dispositivo tiene la tarea de tener la funcionalidad necesaria para comunicarse con el nodo principal de una red que bien puede ser un Router ZigBee o un Coordinador ZigBee, este dispositivo se encarga de transmitir información hacia el router o coordinador al que se encuentre conectad, sin embargo no puede transmitir directamente a otro ZED, para esto es necesario atravesar la ruta hacia el por medio de un ZR o ZC, una de las grandes ventajas de estos dispositivos conectados a una red ZigBee es su ahorro de energía, pues no se requiere que estén encendidos todo el tiempo pues es posible mantenerlos en modo de hibernación hasta que se requiera de ellos.
2.4 Topologías de redes ZigBee
2.4.1 Topología en estrella
En redes en estrella el coordinador se sitúa en el centro, y toda conexión que se quiera realizar entre los distintos nodos de la red debe pasar por éste.
En la Figura 2.9 vemos ilustrada la típica estructura de una red en estrella.
Coordinador de red.
Dispositivo de función completa (FFD).
Dispositivo de función reducida (RFD).
47 En una red estrella se tiene un solo nodo central activo que normalmente es quien administra la red y evita problemas derivados de una mala distribución de la red , las ventajas que una red de este tipo puede generar es la facilidad de implementación así como la facilidad de incrementar los dispositivos conectados a la red, así mismo el fallo de un nodo periférico no influiría el desempeño de la red completa , otro problema que resuelve esta topología son las colisiones de datos, las cuales se eliminan al existir una sola conexión por parte de cada estación al dispositivo central.
2.4.2 Topología en árbol
En esta topología de red en la que los nodos están colocados en forma de árbol el coordinador será la raíz del árbol. La conexión en árbol es parecida a una serie de redes en estrella interconectadas, salvo en que no tiene un nodo central. En cambio, tiene un nodo de enlace troncal, generalmente ocupado por un coordinador, desde el que se ramifican los demás nodos.
Coordinador de red.
Dispositivo de función completa (FFD).
Dispositivo de función reducida (RFD).
48 Los problemas que presentan este tipo de topología radican en que los datos son recibidos por todas las estaciones no importando para quien vayan dirigidos. Por lo tanto surge el problema de dotar a la red con un mecanismo que permita identificar al destinatario de los mensajes.
2.4.3 Topología en malla
La topología más interesante es la topología de malla. Consiste en que al menos uno de los nodos tendrá más de dos conexiones. Con ello conseguimos que si, en un momento dado, un nodo del camino falla y se cae, pueda seguir la comunicación entre todos los demás nodos debido a que se rehacen todos los caminos.
El establecimiento de una red de malla es una manera de encaminar datos, voz e instrucciones entre los nodos. Las redes de malla se diferencian de otras redes en que las piezas de la red (los nodos) están conectadas unas con otras por uno u otro camino. Esta configuración ofrece caminos redundantes por toda la red, de modo que si falla un cable, otro se hará cargo del tráfico. Esta topología, a diferencia de las vistas en apartados anteriores, no requiere de un servidor o nodo central, con lo que se reduce el mantenimiento. Un error en un nodo, no implica la caída de toda la red.
Como ya se ha comentado anteriormente, las redes de malla son autogenerables. La red puede funcionar incluso cuando un nodo desaparece o la conexión falla, ya que el resto de nodos evitan el paso por ese punto. Consecuentemente, se forma una red muy confiable.[8]
Coordinador de red.
Dispositivo de función completa (FFD).
Dispositivo de función reducida (RFD).
49
2.5 Módulos ZigBee
Una vez que se conocen lo dispositivos bajo los cuales se basa esta tecnología y los lineamientos que deben seguir, corresponde el turno a la búsqueda de módulos comerciales que trabajen bajo ZigBee. Para este trabajo se ha realizado una búsqueda de diferentes dispositivos fabricados por empresas diferentes y que perteneces a la ZigBee Alliance y por tal motivo son quienes se encargan de la distribución de productos relacionados.
Si bien en esencia el protocolo no cambia, cada fabricante ofrece diversas soluciones aplicables a él, por lo que en este apartado se detallan diferentes componentes que han sido analizados para ver sus cualidades y saber cuál es el más adecuado y cual ofrece mejores soluciones.
2.5.1 eZ430-RF2480 Development Tool
Se tratad e una herramienta de la hempresa Texas instruments, la cual contiene lo necesario para la implementación de proyectos por medio de ZigBee, asimismo cabe destacar que este dispositivo es compatible y estrechamente vinculada con micronoctroladores de la familia MSP430, dicha herramienta contiene:
Un soporte para las baterías de los módulos.
2 baterías AAA
3 Módulos CC2480
Una interface USB eZ430-RF.
50 Dentro de esta herramienta son incluidas algunas herramientas de trabajo en software así como documentación sobre el hardware incluido dentro de este kit, del mismo modo es posible descargarlas desde la página web del fabricante. Dichos útiles son los siguientes:
La guía de usuario de eZ430-RF2480
Entornos de trabajo Code Composer Essentials (CCE) e IAR Embedded Workbench.
Una guía de usuario para la familia de microcontroladores MSP430.
Fig. 2.13 eZ430-RF2480 Development Tool
Este kit contempla todo un entorno de desarrollo así como los dispositivos necesarios para la implementación de proyectos de tipo inalámbrico, para lo anterior se utiliza una interfaz incluida dentro de esta herramienta de tipo USB, de esta manera la creación de nuevas aplicaciones se torna más cómoda por su fácil interacción con las computadoras ya que muchas veces es utilizada para el alojamiento de interfaces graficas que ejecutan acciones sobre los diferentes dispositivos utilizadas, también es posible mediante la presente herramienta realizar simulaciones en tiempo real sobre el dispositivo por medio de una computadora y el hardware y software subministrado por la empresa Texas Instruments.