ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD PROFE“IONAL ADOLFO LÓPEZ MATEO“
“Control de fuerza en el efector final
de un robot manipulador
”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRONICA
PRESENTA:
Angeles Pilloni Jordan Exael
Pineda Fuentes Fernando
ASESORES:
Dr. Carlos Vázquez Aguilera Dr. Lubiano Juárez Alberto Dr. Lozada Castillo Norma
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITIJLO DE INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
POR LA OPCIÓN DE TITULACIÓN TESIS COLECTIVA y EXAMEN ORAL INDIVIDUAL
DEBERA(N) DESARROLLAR C. lORDAN EXAEL ANGELES PILLONI
C. FERNANDO PINEDA FUENTES
"CONTROL DE FUERZA EN EL EFECTOR FINAL DE UN ROBOT MANIPULADOR"
DESARROLLAR UN CONTROL DE FUERZA EXPLICITO, IMPLEMENTÁNDOLO EN EL EFECTOR FINAL DE UN ROBOT MANIPULADOR, CON EL FIN DE EJERCER Y MANTENER LA FUERZA NECESARIA PARA CADA OBJETO.
• DESARROLLAR UN MANIPULADOR QUE PERMITA DEMOSTRAR EL CONTROL DE FUERZA. • DISEÑAR LAS ETAPAS DE POTENCIAS PARA EL CONTROL DE LOS ACTUADORES.
• CREAR UN SISTEMA DE CONTROL DE LAZO ABIERTO DEL MANIPULADOR PARA REALIZAR LAS PRUEBAS Y CARACTERIZACIÓN DE LOS ELEMENTOS UTILIZADOS.
• DESARROLLAR UNA ESTRATEGIA DE CONTROL DE LAZO CERRADO QUE TENDRÁ UNA RETROALIMENTACIÓN EN LA MEDICIÓN DE FUERZA, IMPLEMENTANDO SENSORES PIEZORRESECTIVOS, y USANDO LA HERRAMIENTA SIMULINK DE MATLAB.
MÉXICO D.F. A 12 DE NOVIEMBRE DE 2012.
OBJETIVO
Desarrollar un control de fuerza explicito, implementándolo en el efector final de un robot manipulador, con el fin de ejercer y mantener la fuerza necesaria para cada objeto de distinto peso.
JUSTIFICACION
En cuestión de robótica existe una amplia variedad de aplicaciones que precisan de un sistema sensorial integrado, tal es el caso del control de fuerza en donde se requieren de una retroalimentación de los estímulos detectados debido a la amplia interacción del manipulador con su entorno.
Diversas técnicas de control de fuerza se han desarrollado, sin embargo en este trabajo se pretende mostrar una solución a partir de superficies táctiles artificiales, formado por sensores piezorresistivos implementados en el efector final de un robot manipulador.
Un método capaz de aumentar la robustez y confiabilidad del sistema, además de lograr así mismo exactitud y repetitividad de la fuerza ejercida sobre el entorno de trabajo.
ÍNDICE
RESUMEN………
I
OBJETIVO………
II
OBJETIVOS PARTICULARES……….……….
III
RESUMEN DE CONTENIDO……….
IV
CAPÍTULO I: INTRODUCCIÓN
1.1 INTRODUCCIÓN……….
2
1.2 ESTADO DE ARTE………..
2
1.3 PLANTEAMIENTO DEL PROBLEMA………..
5
CAPÍTULO II: PRELIMINARES 2.1 SENSORES………...……...
8
2.1.1 SENSORES PIZORESISTIVOS...……….
10
2.1.2 SENSORES DE POSICIÓN……….
13
2.2 ACTUADORES………...……….
19
2.2.1 MOTORES DE CD……….
19
2.2.2 SERVOMOTORES.………
22
2.3 ADQUISICÓN DE DATOS.………..……….
25
2.3.1 NI DAQ-6008……….……….
26
CAPÍTULO III: ROBOTS MANIPULADORES 3.1 DEFINICIÓN DE ROBOT………
30
3.2 TIPOS DE ROBOT………..….
30
3.3 PARTES FUNDAMENTALES DE UN ROBOT……….
38
3.4 CINEMATICA EN ROBOTS MANIPULADORES………
39
3.4.1 CINEMÁTICA DIRECTA……….
40
3.4.2 CINEMÁTICA INVERSA………..
44
3.5 PROTOTIPO……….
45
CAPÍTULO IV: CONTROLADOR PID 4.1 CONCEPTOS DE UN SISTEMA DE CONTROL………...
50
4.2 CONTROLADOR PID………..
53
4.4 EFECTO DE LAS GANANCIAS EN UN CONTROLADOR PID…………
58
CAPÍTULO V: PRUEBAS Y RESULTADOS 5.1 ANALISIS DEL ESPACIO DE TRABAJO DEL PROTOTIPO….………….
60
5.2 CINEMATICA DIRECTA E INVERSA DEL PROTOTIPO…..………
60
5.3 CARACTERIZACION DE LOS SENSORES PIEZORESISTIVOS…...……
63
5.4 CARACTERIZACION DE ENCODERS…...…..………
64
5.5 CARACTERIZACION DEL SERVOMOTOR....………
65
5.6 CARACTERIZACION DE MOTOR DE CD………...
65
5.7 CAONTROL DE FUERZA EN GRIPPER………...
67
5.8 ANALISIS BAJO CONTROLADORES (P, PI, PD, PID)………...
69
CAPÍTULO VI: CONCLUSIONES Y TRABAJO A FUTURO
72
ANEXOS Código fuente para control de servo………...73
Diagramas de etapa de potencia para el control de motores de CD…..……….
76
Etapa de acondicionamiento de señal para sensores FlexiForce………
77
Diagrama en CAD del prototipo………...………..
78
Página 1
CAPÍTULO I
Introducción
Página 2
1.1 INTRODUCCION
El control de fuerza es un tema de gran importancia para diversas aplicaciones industriales; en donde juega un papel fundamental en la prevención de daño de materiales en tareas de agarre y manipulación; siendo de suma importancia la interacción con que se relaciona el manipulador y su medio ambiente. Hay tareas donde es más razonable especificar la fuerza con la que necesita interactuar el manipulador.
Existiendo aplicaciones en donde sería necesario un control preciso de fuerza, aplicaciones tales como: elevación, desbastado, transporte de objetos o en líneas de ensamblaje, en donde es necesario el monitoreo y control de fuerza aplicada.
1.2 ESTADO DE ARTE
Entre las diversas técnicas que existen para el control de fuerza de manera generalizada se tienen los implícitos, en los cuales no exististe sensores de esfuerzo, por lo tanto la fuerza se calcula en base a otros parámetros.
• Procedimientos que implican la relación entre posición y fuerza aplicada:
La rigidez de control por retroalimentación positiva y la rigidez por la retroalimentación correctiva.
• Métodos que implican la relación entre la velocidad y la fuerza aplicada: Control de impedancias y admitancias.
• Métodos que aplican directamente una posición y aplican fuerza: Posición hibrida / control de fuerza e Impedancia de control hibrida.
Página 3 Dentro de esta categoría se pueden encontrar sensores al tacto extrínseco e intrínseco.
Los sensores intrínsecos suelen colocarse dentro de la estructura mecánica del sistema, obteniendo así los datos de contacto con la magnitud de la fuerza utilizando sensores de fuerza, por otro lado los extrínsecos suelen montarse en o cerca de la interfaz de contacto.
Sin embargo los sensores que se han llegado a utilizar hasta el momento difieren de su tecnología, enseguida se mencionaran algunos de estos tipos de sensores:
• Sensores de calibrado de tensión, consiste en un patrón de medidores
de deformación montado en una estructura deformable. La fuerza aplicada sobre el sensor induce tensiones en la estructura que son evaluados por indicadores de tensión.
• Sensores piezoeléctricos de fuerza, como el sensor LIVM, estos contienen finos cristales piezoeléctricos generadores de señales analógicas de tensión en respuesta a la aplicación de las fuerzas dinámicas.
• Sensores ópticos de vigor, se basan en la evaluación de la deformación
de una estructura, ya sea con la medición de intensidad de luz a través de fibra óptica. Estos sensores tienen la ventaja de ser insensible a la presencia de un campo magnético.
• Sensores piezorresistivos como los FSR y los sensores FlexiForce, en los cuales su
resistencia varía con la fuerza aplicada. Ellos muestran una
menor precisión que los otros tipos, pero su muy pequeño
espesor permite una colocación en contacto directo con humanos, por
Página 4 Ahora bien hay que mencionar que existe una gran variedad de tecnologías de sensores, sin embargo hay algo muy importante que se debe tener en cuenta, y es el hecho de que los sensores ideales para la medición de fuerza deben de contar con las siguientes características:
Alta capacidad de repetición de lectura Bajo costo
Aumento de la Robustez y Fiabilidad
Lecturas independientes de la temperatura y campos magnéticos
Sin embargo para la obtención de manipuladores de mayor precisión supondría un mayor tamaño, peso y precio, en la fabricación de dichos manipuladores.
Anteriormente se han desarrollados manipuladores con métodos para el control de fuerza, cada uno de ellos enfocados a diferentes tareas y utilizando diferentes sensores y estrategias de control; tal es el caso de Fujita e Inoue [1], que desarrollaron la estimación de las fuerzas de contacto atreves de galgas extensiometricas. En su método las fuerzas externas eran medidas atreves de las galgas y las fuerzas de inercia eran filtradas utilizado la trayectoria de referencia del extremo del manipulador.
Así mismo, D. Castro (1997) en [2][3] presenta un modelo con un control de fuerza basado en una garra ligera (562 g. de peso) de dedos paralelos que permite una fuerza máxima de 7 Kg, con una abertura de 9 cm. Este modelo consta de una realimentación a partir de un sistema de sensores táctiles resistivos situados en ambas superficies de las pinzas, con el objetivo de reconocimiento de formas básicas en función de la distribución de fuerzas. En este modelo se hizo una aplicación de técnicas de procesamiento de los datos.
Página 5 fuerza normal ejercida. Con el objetivo de la exploración de superficies (transversales) de objetos. Detectando propiedades tales como textura, fricción, huecos y crestas.
Allen [5], proyecta un control de fuerza para la exploración de superficies en 3D, en donde se da un reconocimiento de las características del objeto con las que se entra en contacto.
Al igual que el uso de sensores para el control de fuerza, existen sistemas de control que son enfocados a la visión por computadora como lo es el caso en [6], que presenta un sistema de control de fuerza aplicada para la inserción de pernos a base de la integración de un sistema de visión.
En Alemania (1998) [7 ], se desarrolla un sistema de control de fuerza con realimentación continua (“look-and-move”) a partir de la información visual para guiar los movimientos del robot. Este es aplicado para tareas de agarre guiadas visualmente imitando el comportamiento antropomórfico del sistema humano.
Por otra parte en [8], presenta una interfaz que consiste en un guante con sensores táctiles integrados en cada dedo con el fin de obtener datos de la fuerza aplicada por el operador, se presenta un nuevo método para medir fuerzas con sensores piezorresistivos.
En [9], se presenta una plataforma robot formada por un brazo robot de 6 grados de libertad y un dispositivo de agarre que consistente en una pinza robot de placas paralelas y lisas. Sobre estas superficies se ha montado un conjunto de sensores táctiles artificiales formados por arrays de sensores piezorresistivos.
El sistema así formado, tiene la capacidad de medir, en tiempo real, los puntos de contacto y las fuerzas ejercidas entre las superficies sensoriales y el objeto agarrado.
1.2 PLANTEAMIENTO DEL PROBLEMA
Página 6 realizar movimientos a posiciones específicas y aquellas en las que no solo se lleva a cabo el control de posición, si no también es necesario llevar a cabo un control de fuerza debido a la interacción del manipulador con su entorno.
Muchas tareas en los cuales intervienen los manipuladores suelen estar definidas, siempre partiendo de un entorno de trabajo definido. Por ello cualquier cambio en el proceso y/o condiciones de trabajo supone siempre una calibración de estos sistemas con el fin de adaptarse a las nuevas necesidades.
Debido a ello es necesario mencionar que no es suficiente un control de posición.
Por ello bajo diversas aplicaciones robóticas, el control de fuerza es necesario facilitando la flexibilidad de estos sistemas bajo condiciones de trabajo variantes, permitiendo así poder tener una mayor interacción con el ambiente en el que operan estos sistemas.
Solución Planteada
Los sensores de fuerza juegan un papel muy importante.
La capacidad de censado permite más flexibilidad y robustez en las aplicaciones.
Página 7
CAPÍTULO II
Preliminares
Página 8 2.1SENSORES
Para conseguir que un robot realice su tarea de manera adecuada, es decir con precisión, velocidad e inteligencia, es preciso que tenga conocimiento tanto de su propio estado como de su entorno que lo rodea.
Los sensores nos permiten lograr estas dos características, sin embargo es preciso definir los distintos tipos de sensores y sus clasificaciones en aplicaciones en cuestión de robótica.
En general, la mayoría de los sensores pueden ser divididos en dos grandes grupos:
1. Sensores Analógicos
2. Sensores Digitales
Un sensor analógico es aquel que puede entregar una salida variable dentro de un determinado rango (Ver figura 2.0(a)).
Un sensor digital es aquel que entrega una salida del tipo discreta (Ver figura 2.0(b)). Es decir, que el sensor posee una salida que varía dentro de un determinado rango de valores, pero a diferencia de los sensores analógicos, esta señal varía en pequeños pasos pre-establecidos.
Ahora bien en cuestiones de robótica, es posible para un robot obtener la información relacionada con su estado a base de los denominados sensores internos.
[image:13.595.346.522.454.610.2]Página 9 I. Sensores Internos: Los sensores internos se catalogan de acuerdo a la función que desempeñan. La tabla 2.0 muestra los parámetros medidos de acuerdo con el tipo de sensor.
a) Sensores de posición: Para el control de la posición angular se emplean fundamentalmente los encoders. Los potenciómetros dan bajas prestaciones por lo que no se suelen emplear salvo en contadas ocasiones.
b) Sensores de velocidad: La captación de velocidad se hace necesaria para mejorar el comportamiento dinámico de los actuadores del robot. Un taco-motriz proporciona una tensión proporcional a la velocidad de giro de su eje, un sensor taco-motriz suele usarse en un bucle de control de velocidad analógico.
c) Sensores de presencia: Este tipo de sensores es capaz de detectar la presencia de un objeto dentro de un radio de acción determinado. Esta detección puede llevarse a cabo con o sin contacto con el objeto. Para el caso de detección por contacto, suele tratarse siempre de un interruptor, normalmente abierto o normalmente cerrado según interese. Para el segundo caso en donde se lleva a cabo una detección sin contacto, se suelen utilizar diferentes principios físicos para la detección, dando lugar a distintos tipos de sensores. Por ejemplo los sensores inductivos suelen usarse en detección sin contacto de materiales
TIPOS DE SENSORES INTERNOS DE ROBOTS Potenciómetros Resolver
Analógicos Sincro
Posición Inductosyn
LVDT
Encoders absolutos
Digitales Encoders incrementales
Regla óptica
Velocidad Taco-generatriz
Inductivo Capacitivo Efecto Hall
Presencia Célula Reed
[image:14.595.108.548.177.410.2]Óptico Ultrasónico Contacto
Página 10 metálicos, igualmente en aplicaciones de detección sin contacto suelen usarse los sensores capacitivos, más en este caso los objetos no precisan de ser objetos metálicos. Los detectores de presencia se utilizan en robótica principalmente como auxiliares de detectores de posición, para indicar los límites de las articulaciones.
Para que un robot pueda reconocer el entorno de trabajo que lo rodea, se utilizan sensores externos.
II. Sensores externos: El empleo de mecanismos de detección exteriores permite a
un robot interaccionar con su ambiente de una manera más flexible.
Un robot que puede ver, y sentir es más fácil de entrenar en la ejecución de tareas complejas mientras que, al mismo tiempo, exige mecanismos de control menos estrictos, que las maquinas programadas. Un sistema sensible y susceptible de entrenamiento es también adaptable a una gama mucho más amplia de tareas con lo que se consigue un grado de universalidad.
Los sensores externos pueden clasificase también como sensores de: contacto y no contacto
Los sensores de contacto responden al contacto físico, tal como: el tacto, deslizamiento y torsión.
Estos sensores de tacto están asociados con fases terminales de agarre de objetos. Los sensores de fuerza y torsión se suelen utilizar como dispositivos de retroalimentación para controlar la manipulación de un objeto.
Los sensores de no contacto se basan en la respuesta de un detector de variaciones en la radiación electromagnética o acústica. Los sensores de no contacto son capases de medir el alcance, la proximidad y las propiedades visuales de un objeto.
2.1.1 SENSORES PIEZORESISTIVOS
El efecto piezorresistivo describe cambios en la resistencia eléctrica de un material, tras aplicar estrés mecánico. El efecto piezorresistivo difiere del efecto piezoeléctrico. En contraste con el efecto piezoeléctrico, el efecto piezorresistivo sólo causa un cambio de resistencia, no produce potencial eléctrico.
Página 11 aumentar la longitud útil. El sustrato se une mediante un adhesivo a la pieza sobre la cual se pretende medir el esfuerzo. Según se coloque, con uno o varios elementos piezoresistivos se puede medir la flexión, la tracción, la cizalla o la torsión. Para simplificar su manejo, se comercializan sensores que incluyen varios elementos piezoresistivos colocados según diferentes direcciones.
Es necesario asegurar que el sustrato del sensor este bien adherido a la pieza sometida al ensayo y que la diferencia en los coeficientes de dilatación térmica no provoquen variaciones en la medida.
SENSORES FLEXIFORCE
Los sensores Flexi Force es un sensor de circuito impreso flexible y de capa ultra delgada, el cual puede ser integrado fácilmente en la mayoría de aplicaciones. Puede medir la fuerza entre casi cualquier par de superficies y es lo suficientemente resistente para soportar la mayoría de entornos.
El sensor de Flexi Force se compone de dos capas de sustrato, tal como una película de poliéster. En cada capa, un material conductor es aplicado, seguida de una capa sensible a la presión de la tinta. El área activa de detección se define por un círculo de plata en la parte superior de la tinta sensible a la presión. Cuando el sensor se descarga, su resistencia eléctrica es muy alta. Cuando se aplica una fuerza en el sensor, la resistencia disminuye.
Los sensores Flexi Force mostraron un mejor desempeño en términos de la deriva, repetitividad y linealidad a la hora de ser montados sobre un soporte rígido, y en términos de precisión dinámica cuando se monta en el pulgar.
La figura 2.1, muestra el diagrama electrónico recomendado por el fabricante.
Página 12 En este circuito, la sensibilidad del sensor se puede ajustar cambiando la resistencia de referencia (RF) y/o el voltaje de la unidad (VT), una resistencia de referencia inferior y/o tensión de la unidad hará que el sensor es menos sensible, y aumentar su fuerza activa amplia.
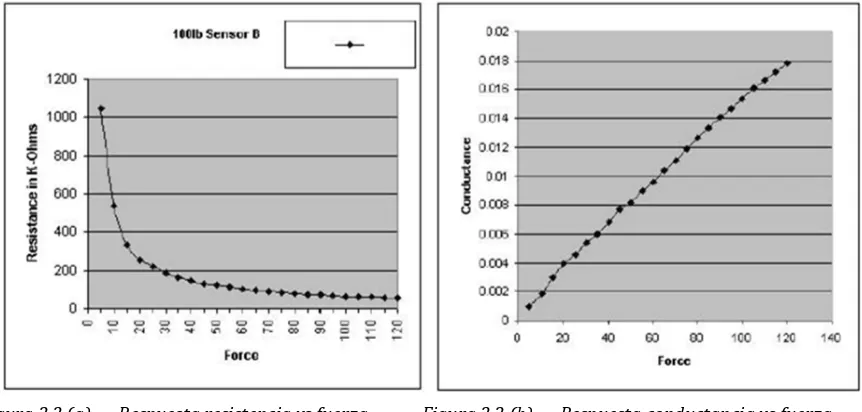
Una de las características más importantes que tienen estos sensores es su respuesta prácticamente lineal, en cuestiones a la conductancia. (Ver figura 2.2(a)).También es posible observar el cambio de su resistencia al aplicarle una fuerza conocida, en el área activa del sensor. (Ver figura 2.2(b)).
Figura 2.2 (a) Respuesta resistencia vs fuerza Figura 2.2 (b) Respuesta conductancia vs fuerza
El sensor FlexiForce lee fuerzas que son perpendiculares al plano del sensor.
La vida del sensor depende de la aplicación en la que se utiliza. Los sensores son reutilizables, si no se utiliza en aplicaciones en las que se ven sometidos a condiciones severas, como con bordes afilados, o fuerzas de cizallamiento.
PROPIEDADES DEL SENSOR
Espesor 0.008 (0.208 mm)
Longitud 8” (203 mm)
6” (152 mm) 4” (102 mm) 2” (51 mm)
Ancho 0.55” (14 mm)
Área de detección 0.375” (9.53 mm) diámetro
Conector 3 pines machos cuadrados(pin central
inactivo) RENDIMIENTO TIPICO
[image:17.595.112.543.251.457.2]Página 13 0-25 lbs (110 N)
0-100 lbs (440 N)*
Temperatura de operación 15°F to 140°F (-9°C to 60°C)
Linealidad (Error) +/- 3%
Repetitividad +/- 2.5%
Histéresis <4.5%
Deriva <5%
Tiempo de respuesta <5
Cambio de salida Hasta el 0,2% (~ 0.36% / ° C).
Cargas <10 kg, la temperatura de
funcionamiento se puede aumentar a 165 ° F (74 ° C).
2.1.2 SENSORES DE POSICION
Existen infinidad de sensores que determinan la posición de un objeto en relación con un punto de referencia. Pero los más utilizados en cuestión de robótica e implementados en control de posición de motores son los potenciómetros y los encoders (incremental, absoluto y lineal).
I. Potenciómetros.
El potenciómetro es un transductor de posición angular, de tipo absoluto, y con salida tipo analógica.
Consiste en una resistencia de hilo bobinado o una pista de material conductor, distribuida a lo largo de un soporte en forma de arco y un cursor solidario a un eje de salida, que puede deslizar sobre dicho conductor. (Ver figura 2.3)
Figura 2.3 Potenciómetro
Página 14 El movimiento del eje arrastra el cursor, provocando cambios de resistencia entre este y cualquiera de los extremos.
También existen potenciómetros con carrera lineal, pero lo más frecuente, cuando se usan como detectores de posición, es emplear los rotativos con o sin topes y de una o más vueltas como preferencia.
Otra característica que se procura que cumplan los potenciómetros cuando son usados como sensores de posición angular es que la ley de variación de la resistencia en función del ángulo de giro, sea lineal. (Ver figura 2.4)
Figura 2.4 Grafica de la resistencia en función del ángulo de giro
La figura 2.5 muestra las partes esenciales de un potenciómetro que puede ser usado como sensor de posición angular.
Página 15
I. Encoders.
Los encoders son sensores que generan señales digitales en respuesta al movimiento. Están disponibles en dos tipos, uno que responde a la rotación, y el otro al movimiento lineal. Cuando son usados en conjunto con dispositivos mecánicos tales como engranes, ruedas de medición o flechas de motores, estos pueden ser utilizados para medir movimientos lineales, velocidad y posición.
Los encoders están disponibles con diferentes tipos de salidas, uno de ellos son los encoders incrementales, que generan pulsos mientras se mueven, se utilizan para medir la velocidad, o la trayectoria de posición. El otro tipo son los encoders absolutos que generan multi-bits digitales, que indican directamente su posición actual.
Los encoders pueden ser utilizados en una gran variedad de aplicaciones. Actúan como transductores de retroalimentación para el control de la velocidad en motores, como sensores para medición, de corte y de posición.
En cuestión a la tecnología que componen a los encoders, existen encoders con tecnología óptica, así como magnética. El sensor óptico provee altas resoluciones, velocidades de operaciones altas, y con seguridad, operación de larga vida en la mayoría de los ambientes industriales. Los sensores magnéticos, se utilizan frecuentemente en aplicaciones de trabajo pesado como en laminadoras de papel y acero, proveen buena resolución, altas velocidades de operación, y máxima resistencia al polvo, humedad, y golpe térmico y mecánico.
a) Encoders ópticos
Los encoders ópticos utilizan un disco de vidrio con un patrón de líneas depositadas en él, un disco metálico o plástico con ranuras (en un encoder rotatorio), o una tira de vidrio o metal (en un encoder lineal). La luz de un LED brilla a través del disco o tira sobre uno o más foto detectores, que produce el suministrador del encoder. Un encoder de incremento tiene una o más de estas pistas, mientras que un encoder absoluto tiene varias pistas como bits de salida.
Página 16
Figura 2.6 Encoders Ópticos
b) Encoders magnéticos
La tecnología magnética es muy resistente al polvo, grasa, humedad, y a otros contaminantes comunes en los ambientes industriales, así como a los golpes y vibraciones. Existen varios tipos de sensores magnéticos. Los sensores de reluctancia variable detectan cambios en el campo magnético causado por la presencia o movimiento de un objeto ferromagnético. El sensor rotatorio de reluctancia variable más sencillo, comúnmente llamado magneto recolector, consiste en un carrete enrollando un imán permanente. Este genera un pulso de voltaje cuando un diente de engrane se mueve ante este. Fuerte, seguro y economico, este sensor se utiliza en la mayoría de las veces para medir la velocidad, ya que no trabaja a menos que el objeto se esté moviendo ante la cara del sensor cerca de unas 180 pulgadas por segundo o más rápido.
La figura 2.7 muestra el principio de funcionamiento inductivo de un encoder magnético.
Página 17 Otro tipo de sensor suele utiliza un imán permanente y un sensor de efecto de Hall o dispositivo magneto resistivo para producir un cambio en cualquier voltaje o resistencia eléctrica en presencia de material ferromagnético, el cual puede tener forma de diente de engrane (para un encoder rotatorio) o banda metálica con ranuras (para un encoder lineal). Este tipo de sensor está disponible tanto en la forma rotatoria como en la lineal.
Otro tipo de sensor magnético usa un dispositivo magneto resistivo para detectar la presencia o ausencia de “tiras” magnetizadas, ya sea sobre el borde de un tambor o sobre una tira no magnética.
Encoders Incrementales
Los encoders de incremento proveen un número específico de pulsos equitativamente espaciados por revolución (PPR) o por pulgada o milímetro de movimiento lineal. Se utiliza un solo canal de salida para aplicaciones donde el sentido de la dirección de movimiento no es importante (unidireccional). Donde se requiere el sentido de dirección, se utiliza la salida de cuadratura (bidireccional), con dos canales de 90 grados eléctricos fuera de la fase; el circuito determina la dirección de movimiento basado en la fase de relación entre ellos. Esto es útil para procesos que se pueden revertir, o para mantener la posición de red cuando se encuentra inmóvil u oscilando mecánicamente. Por ejemplo, la vibración de la maquina mientras este detenido podría ocasionar que un encoder unidireccional produzca una corriente de pulsos que serían contados erróneamente como movimiento. El controlador no sería engañado cuando se utilice la cuadratura de conteo. La figura 2.8 muestra la señal de salida de ambos canales en un giro de sentido anti-horario.
Cuando se requiere más resolución, es posible para el contador computar los márgenes de dirección y rastreo de la serie de pulsos de un canal, el cual duplica (x2) el número de pulsos contados para una rotación o pulgada de movimiento. Al contar ambos márgenes de dirección y de rastreo de ambos canales darán una resolución x4. (Ver figura 2.8)
Página 18 Una salida de un encoder incremental indica movimiento. Para determinar la posición, sus pulsos deben ser acumulados por un contador. La cuenta está sujeta a pérdida durante una interrupción de energía o corrupción por transistores eléctricos. Cuando comienza, el equipo debe ser dirigido a una referencia o posición de origen para inicializar los contadores de posición.
Algunos encoders de incremento también producen otra señal conocida como el “índice”, “marcador”, o “canal Z”, Esta señal, producida una vez por revolución de un encoder de eje o a puntos precisamente conocidos sobre una escala lineal , Se utiliza frecuentemente para localizar una posición específica, especialmente durante una secuencia de mensajes.
Encoders Absolutos.
Un encoder absoluto genera mensajes digitales lo cual representa la posición actual del encoder, así como su velocidad y dirección de movimiento. Si la energía se pierde, su salida será corregida cada vez que la energía sea re-establecida. No es necesario ir a una posición referencial como con los encoders de tipo incremental. Los transistores eléctricos pueden producir únicamente errores de datos transitorios, usualmente muy breve como para afectar la dinámica de un control de sistema.
La resolución de un encoder absoluto es definida como el número de bits por mensaje de salida. Esta salida puede ser directamente en código binario o Gray, el cual produce un cambio de un solo bit en cada paso para reducir errores.
Resolución y precisión en encoders.
Resolución es el número de segmentos de medición o unidades en una revolución de un eje de encoder o una pulgada o milímetro de una escala lineal. Los encoders de eje están disponibles con resoluciones arriba de los 10,000 pulsos por revolución (PPR) directamente, y 40,000 PPR por detección de margen de los canales A y B, mientras que los encoders lineales están disponibles con resoluciones medidos en micrós.
La línea inferior es, el encoder selecto; debe de tener resolución igual a, o mejor que la requerida por la aplicación. Pero la resolución no es toda la historia. Precisión y resolución son diferentes, y es posible tener uno sin necesidad del otro.
Página 19
Figura2 .9 Señal inexactamente resuelta
Por otra parte, en esta figura 2.10 la distancia X es dividida en 24 partes iguales. Cada incremento representa exactamente 1/24 de una revolución. Este transductor opera con exactitud así como la resolución. La precisión, sin embargo, puede ser independiente de la resolución. Un transductor puede tener una resolución de solamente dos partes por revolución, aun así su precisión puede ser + 6 arco segundos.
Figura 2.10 Señal exactamente resuelta
2.2 ACTUADORES
Un actuador es un dispositivo inherentemente mecánico cuya función es proporcionar fuerza para mover o “actuar” otro dispositivo mecánico. La fuerza que provoca el actuador proviene de tres fuentes posibles: Presión neumática, presión hidráulica, y fuerza motriz eléctrica (motor eléctrico o solenoide). Dependiendo del origen de la fuerza el actuador se denomina “neumático”, “hidráulico” o “eléctrico”.
2.2.1 MOTORES DE DC
El motor de corriente continua está compuesto de 2 piezas fundamentales: el rotor y el estator.
Dentro de éstas se ubican los demás componentes como: escobillas y porta-escobillas, colector, eje, núcleo y devanado del rotor, imán permanente, armazón, tapas o campanas.
Rotor
Constituye la parte móvil del motor, proporciona el torque para mover a la carga, está formado por:
Página 20 • Núcleo: Se localiza sobre el eje. Fabricado con capas laminadas de acero, su función es proporcionar un trayecto magnético entre los polos para que el flujo magnético del devanado circule.
Las laminaciones tienen por objeto reducir las corrientes parásitas en el núcleo. El acero del núcleo debe ser capaz de mantener bajas las pérdidas por histéresis. Este núcleo laminado contiene ranuras a lo largo de su superficie para albergar al devanado de la armadura (bobinado).
• Devanado: Consta de bobinas aisladas entre sí y entre el núcleo de la armadura. Estas bobinas están alojadas en las ranuras, y están conectadas eléctricamente con el colector, el cual debido a su movimiento rotatorio, proporciona un camino de conducción conmutado.
• Colector: Denominado también conmutador, está constituido de láminas de material conductor (delgas), separadas entre sí y del centro del eje por un material aislante, para evitar cortocircuito con dichos elementos. El colector se encuentra sobre uno de los extremos del eje del rotor, de modo que gira con éste y está en contacto con las escobillas. La función del colector es recoger la tensión producida por el devanado inducido, transmitiéndola al circuito por medio de las escobillas (llamadas también cepillos). (Ver figura 2.11)
Figura 2.11 Partes del rotor de un motor
Estator
Página 21 • Armazón: Denominado también yugo, tiene dos funciones primordiales: servir como soporte y proporcionar una trayectoria de retorno al flujo magnético del rotor y del imán permanente, para completar el circuito magnético.
• Imán permanente: Compuesto de material ferromagnético altamente remanente, se encuentra fijado al armazón o carcaza del estator. Su función es proporcionar un campo magnético uniforme al devanado del rotor o armadura, de modo que interactúe con el campo formado por el bobinado, y se origine el movimiento del rotor como resultado de la interacción de estos campos. (Ver figura 2.12)
Figura 2.12 Partes del estator de un motor
• Escobillas: Las escobillas están fabricadas de carbón, y poseen una dureza menor que la del colector, para evitar que éste se desgaste rápidamente. Se encuentran albergadas por los porta-escobillas. Ambas, escobillas y porta-escobillas, se encuentran en una de las tapas del estator. (Ver figura 2.13)
La función de las escobillas es transmitir la tensión y corriente de la fuente de alimentación hacia el colector y, por consiguiente, al bobinado del rotor.
La función del porta-escobillas es mantener a las escobillas en su posición de contacto firme con los segmentos del colector.
Página 22
Figura 2.13 Escobillas
2.2.2 SERVOMOTORES
Un servo es un dispositivo pequeño que tiene un eje de rendimiento controlado. Este puede ser llevado a posiciones angulares específicas al enviar una señal codificada. Con tal de que una señal codificada exista en la línea de entrada, el servo mantendrá la posición angular del engranaje.
Cuando la señala codificada cambia, la posición angular de los piñones cambia. En la práctica, se usan servos para posicionar superficies de control como el movimiento de palancas, pequeños ascensores y timones. Ellos también se usan en radio control, títeres, y por supuesto, en robots.
Los servos son sumamente útiles en robótica. Los motores son pequeños, tienen internamente una circuitería de control interna y es sumamente poderoso para su tamaño. También potencia proporcional para cargas mecánicas.
Un servo, por consiguiente, no consume mucha energía. Se muestra la composición interna de un servo motor en la figura 2.14. Podrá observar la circuitería de control, el motor, un juego de piñones, y la caja.
Página 23
Figura 2.14 Partes de un servomotor
El motor del servo tiene algunos circuitos de control y un potenciómetro (una resistencia variable) esta es conectada al eje central del servo motor. En la figura 2.14 se puede observar al lado izquierdo del circuito. Este potenciómetro permite a la circuitería de control, supervisar el ángulo actual del servo motor. Si el eje está en el ángulo correcto, entonces el motor está apagado. Si el circuito chequea que el ángulo no es el correcto, el motor girará en la dirección adecuada hasta llegar al ángulo correcto.
[image:28.595.178.457.97.318.2]El eje del servo es capaz de llegar alrededor de los 180 grados. Normalmente, en algunos llega a los 210 grados, pero varía según el fabricante. Un servo normal se usa para controlar un movimiento angular de entre 0 y 180 grados. Un servo normal no es mecánicamente capaz de retornar a su lugar, si hay un mayor peso que el sugerido por las especificaciones del fabricante.
Página 24 El cable de control se usa para comunicar el ángulo. El ángulo está determinado por la duración de un pulso que se aplica al alambre de control. A esto se le llama PCM Modulación Codificada de Pulsos. El servo espera ver un pulso cada 10 o 20 milisegundos (Ver figura 2.15).
La longitud del pulso determinará los giros de motor. Un pulso de 1.5 ms., por ejemplo, hará que el motor se torne a la posición de 90 grados (llamado la posición neutra). Si el pulso es menor de 1.5 ms., entonces el motor se acercará a los 0 grados. Si el pulso es mayor de 1.5ms, el eje se acercará a los 180 grados. (Ver figura 2.16)
Como se observa, la duración del pulso indica o dictamina el ángulo del eje (mostrado como un círculo con flecha).
Nótese que las ilustraciones y los tiempos reales dependen del fabricante de motor. El principio, sin embargo, es el mismo.
Figura 2 .16 Señal de ancho de pulso para un servomotor
En el trabajo aquí presente se llevó a cabo la selección del servomotor VS-11 VIGOR, el cual ha sido seleccionado bajo las características que favorecen el desarrollo del proyecto.
Página 25 La característica primordial que buscamos en un servomecanismo fue el alto torque que permitiese ejercer una fuerza lo más grande posible pudiendo llevar a cabo la tarea de ejercer presión sobre los objetos.
2.3 ADQUISICION DE DATOS
La adquisición de datos o adquisición de señales, consiste en la toma de muestras del mundo real (sistema analógico) para generar datos que puedan ser manipulados por un ordenador u otras electrónicas (sistema digital).
Consiste, en tomar un conjunto de señales físicas, convertirlas en tensiones eléctricas y digitalizarlas de manera que se puedan procesar en una computadora o PC.
Se requiere una etapa de acondicionamiento, que adecue la señal a niveles compatibles con el elemento que hace la transformación a señal digital.
El elemento que hace dicha transformación es el módulo de digitalización o tarjeta de Adquisición de Datos (DAQ).
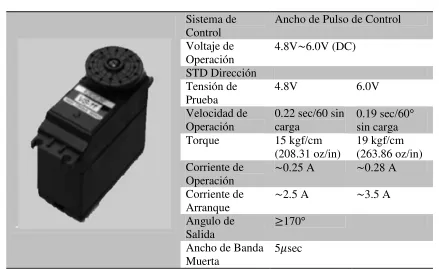
DATOS TECNICOS
-Sistema de Control
Ancho de Pulso de Control
Voltaje de Operación
4.8V~6.0V (DC)
STD Dirección Tensión de Prueba
4.8V 6.0V
Velocidad de Operación
0.22 sec/60 sin
carga 0.19 sec/60sin carga °
Torque 15 kgf/cm
(208.31 oz/in)
19 kgf/cm (263.86 oz/in) Corriente de
Operación ~0.25 A ~0.28 A
Corriente de
Arranque ~
2.5 A ~3.5 A
Angulo de Salida
170°
Ancho de Banda
[image:30.595.99.538.111.380.2]Muerta 5 sec
Página 26
2.3.1 DAQ NI USB 6008
Para el procesamiento de los datos por medio de la computadora, se requirió de un sistema de adquisición de datos que realice el muestreo de las señales de interés y que transforme dicha información en forma digital. Para lograr nuestros objetivos en este proyecto se eligió usar el dispositivo de adquisición de datos NI-6008 de National Instruments (Ver figura 2.17).
Figura 2.17 DAQ NI USB 6008
Diversas características hacen de este sistema, una herramienta muy útil, además de ser un sistema de adquisición de datos de bajo costo. La tabla 2.3 muestra en general algunas de las características más relevantes de la tarjeta de adquisición de datos DAQ NI-6008
Analog Input
Single-Ended Channels 8
Differential Channels 4
Resolution 12 bits
Sample Rate 10 kS/s
Throughput (All Channels) 10 kS/s
Max Voltage 10 V
Maximum Voltage Range -10 V , 10 V
Maximum Voltage Range Accuracy 138 mV
Minimum Voltage Range -1 V , 1 V
Minimum Voltage Range Accuracy 37.5 mV
Number of Ranges 8
Simultaneous Sampling No
Página 27
Analog Output
Channels 2
Resolution 12 bits
Max Voltage 5 V
Maximum Voltage Range 0 V , 5 V
Maximum Voltage Range Accuracy 7 mV
Minimum Voltage Range 0 V , 5 V
Minimum Voltage Range Accuracy 7 mV
Update Rate 150 S/s
Current Drive Single 5 mA
Current Drive All 10 mA
Digital I/O
Bidirectional Channels 12
Input-Only Channels 0
Output-Only Channels 0
Number of Channels 0 , 12
Timing Software
Logic Levels TTL
Maximum Input Range 0 V , 5 V
Maximum Output Range 0 V , 5 V
Counter/Timers
Counters 1
Maximum Range 0 V , 5 V
Max Source Frequency 5 MHz
Pulse Generation No
Resolution 32 bits
Timebase Stability 50 ppm
Logic Levels TTL
Página 28 En la figura 2.18 se muestra el diagrama interno de una tarjeta DAQ NI-6008
Página 29
CAPÍTULO
III
Robots manipuladores
Página 30 3.1 DEFINICIÓN DE ROBOT
Una definición oficial de un robot proviene del Instituto de Robot América (RIA): Un robot es un manipulador multifuncional reprogramable diseñado para mover materiales, piezas, herramientas o dispositivos especializados a través de variables movimientos programados para la realización de una variedad de tareas.
El robot, como lo hemos definido, nació de la unión de las dos anteriores tecnologías: tele-operadores y máquinas controladas numéricamente de molienda.
Tele-operadores, o dispositivos de amo-esclavo, se desarrollaron durante la Segunda Guerra Mundial para manejar materiales radiactivos.
Equipo de control numérico (CNC) se desarrolló debido a la alta precisión requerida en el mecanizado de ciertos elementos, tales como los componentes de las aeronaves de alto rendimiento.
Los primeros robots esencialmente combina la mecánica de los vínculos con el tele-operador, la autonomía y capacidad de programación de máquinas CNC.
3.2 TIPOS DE ROBOT
Los robots manipuladores se componen de los enlaces conectados por juntas para formar una cadena cinemática. Las articulaciones son típicamente giratorio (de revolución) o lineal (prismáticos). (Ver figura 2.0)
Página 31 La variable común que se denota por refiere a una articulación de giro y para la articulación prismática, representan el desplazamiento relativo entre los enlaces adyacentes.
Aunque hay muchas maneras posibles de usar las articulaciones prismáticas y de revolución de la construcción de cadenas cinemáticas, en la práctica sólo unos pocos de
ellos son de uso común.
Aquí se describen brevemente varios arreglos que son los más típicos.
Manipulador articulado (RRR)
El manipulador articulado también se le llama de revolución, o antropomórfico manipulador. El brazo articulado ABB IRB1400 es un ejemplo, como se muestra en la figura 3.1(a).
Un diseño común de un manipulador con articulación de giro, es el paralelogramo como el Motoman SK16, que se muestra en la figura 3.1 (b).
Página 32 Este tipo de manipulador se conoce como un manipulador de codo. La estructura y la terminología asociada con el manipulador de codo se muestran en la figura 3.2.
Su área de trabajo se muestra en la figura 3.3.
Figura 3.2 Estructura y terminología de un manipulador de codo
El manipulador de revolución garantiza la libertad de movimiento relativamente grande en un espacio compacto. El paralelogramo, aunque por lo general menos hábil que el manipulador de codo, sin embargo, tiene varias ventajas que lo convierten en un diseño atractivo y popular. La característica más notable del manipulador paralelogramo es que el actuador para el conjunto 3 se encuentra en el enlace 1. Ya que el peso del motor nace por un enlace, los enlaces 2 y 3 pueden ser más ligeros y los motores pueden llegar a ser menos potentes. También la dinámica del manipulador paralelogramo es más sencilla que las del manipulador de codo, por lo que es más fácil de controlar.
Página 33 Manipulador esférico (RRP).
Mediante la sustitución de la tercera o la articulación del codo en el manipulador de revolución por una articulación prismática obtiene el manipulador esférico. (Ver figura 3.4)
Figura 3.4 Estructura y terminología de un manipulador esférico RRP
El manipulador esférico, término que deriva del hecho de que las coordenadas esféricas que definen la posición del efector final con respecto a un marco que tiene su origen en la intersección de los tres ejes z, son las mismas que las tres primeras variables comunes.
[image:38.595.242.402.212.370.2]La figura 3.5 muestra el brazo de Stanford, uno de los más conocidos robots esféricos.
Página 34 El espacio de trabajo de un robot manipulador esférico se muestra en la figura 3.6.
Figura 3.6 Área de trabajo de un manipulador esférico
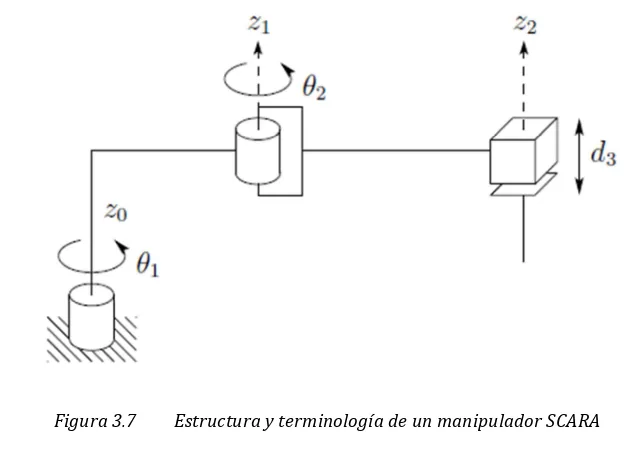
Manipulador SCARA (RRP).
El brazo SCARA (Selective Compliant Articulated Robot for Assembly) se muestra en la figura 3.7 es un manipulador popular, que, como su nombre lo indica, está diseñado para operaciones de montaje. Aunque el SACARA tiene una estructura de PVP, que es muy diferente de la del manipulador esférico, tanto en apariencia como en su amplia gama de aplicaciones.
[image:39.595.153.471.510.736.2]Página 35 A diferencia del diseño esférico, en el cual z0 es perpendicular a z1, y z1 es perpendicular a z2, En el SCARA z0, z1 y z2 mutuamente paralelos entre sí.
[image:40.595.230.405.169.344.2]La figura 3.8 muestra la E2L653S Epson, un manipulador de este tipo.
Figura 3.8 Manipulador E2L653S Epson
El espacio de trabajo del manipulador SCARA se muestra en la figura 3.9.
Figura 3.9 Espacio de trabajo de un manipulador SCARA
Manipulador cilíndrico (RPP).
Página 36
Figura 3.10 Estructura y terminología de un manipulador cilíndrico RPP
La primera articulación es de revolución y produce una rotación alrededor de la base, mientras que las articulaciones segunda y tercera son prismáticas.
Como su nombre indica, las variables comunes son las coordenadas
cilíndricas del efector final con respecto a la base.
Un robot cilíndrico, el Seiko RT3300, se muestra en la figura 3.11.
Figura 3.11 Seiko RT3300
Página 37
Figura 3.12 Espacio de trabajo de un manipulador cilíndrico
Manipulador cartesiano (PPP).
[image:42.595.247.380.105.295.2]Un manipulador cartesiano es aquel que cuenta con tres articulaciones prismáticas, como se muestra en la figura 3.13.
Figura 3.13 Estructura y terminología de un manipulador cartesiano PPP
Para el manipulador cartesiano, las articulaciones variables del efector final se
encuentran respecto a la base. Como era de esperar la descripción
Página 38 Los manipuladores cartesianos son útiles para aplicaciones de montaje de mesa y, como robots de pórtico, para la transferencia de material o de carga.
Un ejemplo de un robot cartesiano, es el Epson. (Ver figura 3.14)
Figura 3.14 Robot cartesiano EPSON
El espacio de trabajo de un cartesiano manipulador se muestra en la figura 3.15.
Figura 3.15 Espacio de trabajo de un manipulador cartesiano
3.3 PARTES FUNDAMENTALES DE UN ROBOT
Un robot manipulador no solo es el conjunto de una serie de conexiones mecánicas. El brazo mecánico es solo un componente más de un sistema robótico en general.
Página 39
Figura 2.16 Elementos principales de un robot manipulador
Incluso el software programado, debe de considerarse como una parte integral y fundamental de todo el sistema, ya que la forma en que este se encuentra programado, puede tener gran impacto en su rendimiento y posteriores series de aplicaciones.
3.4 CINEMATICA EN ROBOTS MANIPULADORES
La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento espacial del robot como una función del tiempo, y en particular por las relaciones entre la posición y la orientación de la herramienta del robot con los valores que toman sus coordenadas de sus articulaciones.
Existen dos problemas fundamentales a resolver con respecto a la cinemática del robot:
• Cinemática Directa. Consiste en determinar la posición y orientación del extremo final del robot con respecto al sistema de la base del robot a partir de conocer los valores de las articulaciones y los parámetros geométricos.
Página 40
Figura 2.17 Relación entre la cinemática directa e inversa
Cinemática Directa (ángulos para encontrar posición): Se conoce
a) La longitud de cada eslabón. b) El ángulo de cada articulación.
Se busca La posición de cualquier punto (coordenadas con respecto a la base)
Cinemática Inversa (posición para encontrar ángulos): Se conoce
a) La longitud de cada eslabón.
b) La posición de cualquier punto (coordenadas con respecto a la base). Se busca El ángulo de cada articulación necesitados para obtener la posición.
3.4.1 CINEMATICA DIRECTA
El problema cinemático directo se reduce a encontrar la matriz de transformación homogénea (T) que relacione la posición y orientación del extremo del robot respecto a su sistema de referencia fijo (base del robot). La matriz T está en función de los parámetros de las articulaciones del robot. Para un robot de n grados de libertad tenemos:
Página 41
, , , …
, , , …
Dónde:
…
= Son las variables de las articulaciones.Para articulaciones revolutas las variables son ángulos.
Para articulaciones prismáticas las variables son distancias.
, ,
= Coordenadas de la posición del extremo del robot., ,
= Ángulos de la orientación del extremo del robot.METODO GEOMETRICO
Las funciones mencionadas pueden ser encontradas mediante métodos geométricos para el caso de robots de 2 grados de libertad (cada relación articulación-eslabón constituye un grado de libertad. (Ver figura 3.18)
Figura 3.18 Análisis geométrico para 2 grados de libertad
De tal modo que la posición de la articulación final queda definida de la siguiente manera:
cos
cos
Página 42 Sin embargo para robots de más de dos grados de libertad, resulta complicado aplicar métodos geométricos para la solución de su cinemática directa.
Por ello, a cada eslabón se le asocia un sistema coordenado y utilizando transformaciones homogéneas, es posible representar las rotaciones y traslaciones relativas entre los diferentes eslabones que componen el robot.
Siendo la matriz:
!
"#" En donde$ %&'()* ( (+ ,-*%(+
La matriz de transformación homogénea que representa la posición y orientación relativa entre los sistemas asociados a dos eslabones consecutivos del robot.
De tal modo que es posible representar de forma parcial o total la cadena cinemática que forma a el robot, de la siguiente manera:
!
./ !
"#" "0Por ejemplo para el caso de un robot de 6 grados de libertad, su cadena cinemática, quedaría representada por la siguiente matriz de transformación homogénea:
1 !
23!
2∗ ! ∗ ! ∗ !
5∗ !
56∗ !
63Ecuación 3.4 Cadena cinemática para un robot de 6 grados de libertad
ALGORITMO DE DENAVIT-HARTENBERG
En 1955 Denavit y Hartenberg propusieron un método matricial que permite establecer de manera sistemática un sistema de coordenadas. La representación de Denavit-Hartenberg (D-H) establece que seleccionándose adecuadamente los sistemas de coordenadas asociados a cada eslabón, será posible pasar de uno al siguiente mediante 4 transformaciones básicas que dependen exclusivamente de las características geométricas de cada eslabón.
!
"7*8
, 91),%+
,:91),%+
,;97*8
, 9<
?
=
99=
>?
990 0
0 0
0 0 0 0
A <
1 0 0 0
0 1 0 0
0 0 1
"A C
1 0 0 ,
"0 1 0 0
0 0 1 0
0 0 0 1
D E
1 0 0 0
0 =
9>?
90
Página 43
G
H
H
I
=
9>?
9=
9?
9?
9,
"=
9?
9=
9=
9>=
9?
9,
"?
90 ?
9=
9"
0 0 0 1 J
K
K
L
En donde:
• El parámetro
,
" es la distancia entreM
" yM
"#medida a lo largo de
N
" • El parámetro " es el ángulo entreM
" yM
"# referido aN
"• El parámetro " es la distancia de
N
"# aN
" medida a lo largo deM
" • El parámetro " es el ángulo entreN
"# yN
" referido aM
" [image:48.595.123.530.247.587.2](Ver figura 3.19)
Figura 3.19 Parámetros para el análisis D-H
La matriz de transformación en forma más general, representa la rotación, translación, perspectiva y factor de escala, como se muestra a continuación.
!
"<
7
O|
O> > > > > >
O
| ?
OPágina 44 3.4.2 CINEMATICA INVERSA
El objetivo del problema cinemático inverso consiste en encontrar los valores que deben tomar las variables articulares del robot para que su extremo se posicione y oriente según una determinada localización espacial.
A diferencia del problema cinemático directo donde de una manera sistemática e independiente de la configuración del robot se llega a una solución, en el problema cinemático inverso el mecanismo de solución es fuertemente dependiente de la configuración y con frecuencia la solución no es única.
Normalmente los métodos geométricos nos permiten obtener normalmente los valores de las primeras variables, que son las que consiguen posicionar el extremo del robot en un punto determinado.
También es posible recurrir a manipular directamente las ecuaciones obtenidas del problema cinemático directo.
En muchos robots de 6 grados de libertad es posible aplicar acoplamiento cinemático, para que los ejes dedicados al posicionamiento y los ejes dedicados a la orientación, sean tratados como dos problemas independientes.
METODO GEOMETRICO
[image:49.595.244.387.485.637.2]Se basa en encontrar un número suficiente de relaciones geométricas en las que intervendrán las coordenadas del extremo del robot, las variables de las articulaciones y las dimensiones físicas del robot. El dato de partida son las coordenadas
R , R , R
. (Ver figura 3.20)Figura 3.20 Relación geométrica para la cinemática inversa
Página 45 Por otro lado pueden existir diversas soluciones para colocar el efector final en un punto deseado, dependiendo mucho de la estructura del robot manipulador, tal es el siguiente caso en el que se ilustra gráficamente en la figura 3.21, dos posibles soluciones a la cinemática inversa.
Figura 2.21 Análisis de ante 2 posibles soluciones en cinemática inversa
3.5 PROTOTIPO
La propuesta de prototipo que se ha desarrollado fue la de un robot cilíndrico, ya que es un robot manipulador sencillo de controlar y satisface la necesidad de demostrar la estabilidad del control de fuerza, al momento de desplazar un objeto.
El robot cilíndrico sobre el que se ha trabajado ha sido adaptado de tal manera que en comparación con el modelo tradicional de un robot cilíndrico en el cual existe un tercer eslabón y el cual suele ser prismático; para este caso didáctico se ha omitido dicho tercer eslabón.
Página 46
Figura 3.22 Acoplamiento de soportes con engrane
En el diseno para la segunda articulacion la cual viene siendo prismatica se propuso como base de deslizamiento un tubo al cual se le ha monto una cremallera como se muestra en la figura 3.23.
Figura 3.23 Cremallera acolada en tubo para deslizamiento
Página 47
Figura 3.24 Acoplamiento del soporte de base y tubo con cremallera
Para la implementacion del efector final se diseño una base que se desplazara sobre la cremallera, en esta ultimo elemento del robot manipulador, se monto un servomotor al cual se le acoplo un un engrane que permitiese el movimiento del gripper.
Notese que para el movimiento de cada elemento del griper seria necesario un juego de engranes los cuales estan acoplados bajo el mismo paso
La figura 3.25 muestra una vista lateral del acoplamiento entre engranes y servomotor, sobre la base del efector final.
Figura 3.25 Vista lateral de la base superior montada
Página 48
Figura 3.26 Efector final (gripper)
En la figura 3.37 se muestra el diseno final del prototipo desarrollado.
Página 49
CAPÍTULO
IV
Página 50
Existen múltiples sistemas de control en infinidad de aplicaciones tales como en la industria automotriz, en diversas industrias maquiladoras, en aplicaciones espaciales, hasta llegar a aquellas aplicaciones destinadas al hogar, tales como control de temperatura ambiental dentro del hogar o el control de temperatura en el agua.
Un sistema de control desempeña una función importante en el manejo de sistemas automáticos, un controlador automático compara el valor real de la salida de una planta con respecto al valor deseado (entrada), determinando la desviación y produciendo una señal de control, que como objetivo tiene reducir dicha desviación a cero o al menos en un valor muy pequeño. A esta manera en la cual el controlador produce una señal de control se le denomina acción de control.
4.1 CONCEPTOS DE UN SISTEMA DE CONTROL
Un sistema de control está integrado por varios procesos, cuyo fin es controlar la señal de salida.
En la figura 4.0 se muestra un diagrama a bloques de un sistema de control típico.
Figura 4.0 Diagrama a bloques de un sistema de control convencional.
Página 51
• On /Off
• Proporcionales
• Integrales
• Proporcional-Derivativo
• Proporcional-Integral
• Proporcional-Integral-Derivativo
O de igual manera en:
• Control en lazo abierto
• Control en lazo cerrado
Sistema de control en lazo abierto.
En este tipo de sistemas de control no se mide la salida, y mucho menos se retroalimenta, de tal modo que no compara la entrada con la salida, así que que la salida no afecta la acción de control, es decir a cada entrada le corresponde una operación fija.
Figura 4.1 Diagrama a bloques de un sistema de control a lazo abierto.
Un diagrama a bloques de un sistema de control en lazo abierto puede observarse en la figura 4.1, este tipo de sistema de control es muy susceptible a perturbaciones.
Página 52
Sistemas de control en lazo cerrado.
Un sistema que contiene una retroalimentación, suele denominarse sistema de control en lazo cerrado.
Figura 4.2 Diagrama a bloques de un sistema de control a lazo cerrado.
La figura 4.2 muestra un diagrama a bloques de lo que es un sistema de control en lazo cerrado con retroalimentación unitaria. En este sistema se compara la señal de salida con la entrada, de tal modo que si existe una diferencia entre estas dos señales, en tal caso el sistema de control produce una señal de control que corrige el proceso.
Estos sistemas retroalimentados pueden ser lineales o no lineales, variantes con el tiempo o invariantes en el tiempo. Y de acuerdo con la señal que operen, pueden hacer referencia a sistemas en tiempo continuo o discreto, o bien sistemas modulados y no modulados.
Página 53
4.2 CONTROLADOR PID
Son los controladores más utilizados a nivel industrial, debido a su gran desempeño en diversos procesos que implican sistemas de control.
Acción de control Proporcional
Un controlador PID, ofrece dentro de sí una acción de control proporcional, en donde la relación entre la salida de control y la señal de salida es:
En donde es la ganancia proporcional, considerado como un amplificador con
ganancia ajustable.
Acción de control Integral
En la acción de control integral, el valor de salida del controlador, cambia con una razón proporcional a la señal del error.
La función de transferencia del controlador integral es:
Acción de control PD
En conjunto de la acción de control proporcional y la acción de control derivativa provee de un control proporcional-derivativo que se define mediante
Página 54
1
La acción de control derivativa, ocurre en donde la magnitud de la salida del controlador es proporcional a la velocidad de cambio de la señal de error. De forma intuitiva, el control derivativo afecta el error en estado estable de un sistema, solo si el error en estado estable varía con el tiempo.
En resumen se puede decir que el efecto de un control proporcional-derivativo tiene los siguientes efectos sobre el sistema:
• Mejora el amortiguamiento y reduce el sobrepaso máximo.
• Reduce el tiempo de levantamiento y el de asentamiento. • Puede acentuar el ruido en altas frecuencias.
Para muchos sistema este tipo de controlado puede ser idóneo, presentando una gran respuesta.
Acción de control PI
Por otro lado en conjunto de la acción de control proporcional e integral dan paso a un controlador proporcional- integral (PI), que aunque mejora el error en estado estable pone en juego la estabilidad.
La ecuación que rige la acción de control proporcional-integral es:
Las características básicas de esta acción de control son:
• Mejora el amortiguamiento y reduce el sobrepaso máximo.
Página 55
Diseño del controlador PID
En el PID la ley de control es la siguiente:
El diagrama a bloques de un sistema PID se muestra en la figura 4.3.
Figura 4.3 Diagrama a bloques de un PID
El conjunto de cada una de las acciones de control (P-I-D), mejoran la eficiencia de un sistema, por un lado la parte integral se encarga del error en estado estable eliminando el offset y aunque lleve a una respuesta oscilatoria de amplitud ya sea creciente o decreciente lentamente, se cuenta con las demás acciones de control, que como por ejemplo, la acción de control proporcional-integrativa ayuda a eliminar el par de perturbación escalón, por otro lado la acción derivativa conjugada con una acción de control proporcional aporta una gran sensibilidad al sistema al cambio, es decir responde a la velocidad del cambio del error previniendo el error y aumentando la estabilidad del sistema.
4.3 REGLAS DE SINTONIZACION DE CONTROLADORES PID
Hay diversas reglas de sintonización para controladores, que mejoran el desempeño de los mismos.
Página 56
sistema, de tal modo que no es necesario conocer el modelo matemático de la planta para llevar a cabo una sintonización del PID, basta con conocer su respuesta.
Primer método.
Se analiza la respuesta del sistema ante una entrada escalón unitario, si de manera matemática la planta no contiene integradores ni polos dominantes complejos conjugados, la respuesta del sistema puede exhibirse en forma de S, como se muestra en la figura 4.4.
Figura 4.4 Respuesta de un sistema ante una entrada escalón unitario.
En tal caso se considera el tiempo de retardo y la constante de tiempo , estas mismas se determinan dibujando una recta tangente en el punto de inflexión y determinando la intersección de esta tangente con el eje del tiempo como se muestra a continuación en la figura 4.5.