Diseño Y Elaboración De Guías Para El Desarrollo De Prácticas De Laboratorio Para Máquinas Eléctricas
126
0
0
Texto completo
(2) TABLA DE CONTENIDO. MOTOR DE INDUCCION ASINCRONO fundamentos teóricos relación de potencias circuito equivalente practica 1: obtención del modelo del motor de inducción jaula de ardilla y rotor devanado practica 2: motor de inducción jaula de ardilla con carga practica 3: motor de inducción rotor devanado con carga practica 4: corriente de arranque de un motor de inducción rotor devanado otras formas de arranque de un motor. MOTORES MONOFÁSICOS DE INDUCCIÓN introducción circuito equivalente motor de fase partida motor de arranque por condensador practica 5: cambio de giro de un motor monofásico de inducción. MOTOR DE CORRIENTE CONTINUA aspectos constructivos conceptos básicos circuito equivalente del motor de c.c. curva de magnetización de un motor de corriente continua curva de magnetización de un motor de corriente continua motor de corriente continua conexión independiente y en derivación o shunt practica 6: potencia, par y eficiencia de un motor shunt o derivación control de velocidad en motores c.c. en derivación.
(3) practica 7: control de velocidad motor de corriente continua conexión shunt motor de corriente continua conexión serie motor de corriente continua conexión compuesta practica 8: potencia, par y eficiencia de un motor de corriente conexión compuesta diferencial larga (b2-d3) practica 9: potencia, par y eficiencia de un motor de corriente conexión compuesta aditiva larga (b2-d4) practica 10: potencia, par y eficiencia de un motor de corriente conexión compuesta diferencial corta (d3-d4) practica 11: potencia, par y eficiencia de un motor de corriente conexión compuesta aditiva corta (d4-d3) practica 12: potencia, par y eficiencia de un motor de corriente conexión compuesta diferencial larga usando devanado serie (d1-d4) practica 13: potencia, par y eficiencia de un motor de corriente conexión compuesta aditiva larga usando devanado serie (d4-d1). GENERADORES DE CORRIENTE CONTINUA fundamentos teóricos de los generadores dc generadores con excitación independiente generador conexión shunt practica 14: curva de magnetización de un generador de corriente continua generador serie practica 16: curva característica de un generador de corriente continua excitando solo el devanado serie generador compound practica 17: generador compuesto conexión larga aditiva con carga practica 18: generador compuesto conexión larga detractiva con carga regulación de voltaje perdidas en la maquina cc.
(4) GENERADORES SINCRONOS fundamentos teóricos de los generadores síncronos el circuito equivalente reacción de la armadura regulación de voltaje relación de potencia relación de potencia aproximada pruebas de generadores síncronos practica 17: prueba de circuito abierto para un generador síncrono practica 15: prueba en corto circuito para un generador síncrono operación en paralelo de generadores síncronos practica 16: sincronización de un generador con la red. MOTORES SÍNCRONOS fundamentos teóricos de los motores síncronos circuito equivalente del motor síncrono efecto de los cambios de la carga en un motor síncrono efecto de los cambios en la corriente de campo de un motor síncrono arranque de motores síncronos practica 19: curva en v un motor síncrono en vacío practica 20: curva en v de un motor síncrono con carga.
(5) MOTOR DE INDUCCION O ASINCRONO 1. Fundamentos teóricos Un motor de inducción está construido de tal forma que no existe una conexión física entre el estator y el rotor, por lo cual la tensión y corriente en el rotor son inducidas por el estator por medio de campos electromagnéticos giratorios. El estator está formando por un apilamiento de chapas de acero al silicio que disponen de unas ranuras en su periferia interior en las que se sitúa un devanado trifásico distribuido, alimentado por una corriente del mismo tipo, de tal forma que se obtiene un flujo giratorio de amplitud constante distribuido sinodalmente por el entre hierro. (Fraile, 2003, p.261) El rotor está constituido por un conjunto de chapas apiladas, formando un cilindro, que tienen unas ranuras en la circunferencia exterior, donde se coloca el devanado; en el tipo en forma de jaula de ardilla se tiene una serie de conductores de cobre o aluminio puestos en corto circuito por dos anillos laterales. En el caso de rotor devanado o con anillos, se tiene un arrollamiento trifásico similar al situado en el estator, en el que las tres fases se conectan por un lado en estrella y por el otro se envían a unos anillos aislados entre sí, esta disposición hace posible la introducción de resistencias externas por los anillos para limitar las corrientes de arranque, mejorar las características de par y controlar la velocidad. En la figura 1 se muestra un esquema representativo de las partes constitutivas de un motor de inducción. (Fraile, 2003, p.261). Fig. 1 Estator, rotor jaula de ardilla y rotor devanado con anillos. (Fraile, J (2003), Máquinas eléctricas).
(6) 1.2.. VELOCIDAD SINCRONICA. Al aplicar al estator un conjunto trifásico de voltajes, un conjunto trifásico de corrientes estatóricas que producen un campo magnético (B), que gira en dirección contraria a las manecillas del reloj. La velocidad de rotación de este campo magnético se expresa por la ecuación: 𝑛𝑠𝑖𝑛𝑐 =. 120 fe P. (Ec. 1.). Donde: nsinc: velocidad sincrónica, fe: frecuencia del estator (frecuencia de la red), P: número de polos de la máquina. (Chapman, 2000, p.391) 1.3.. VELOCIDAD DE DESLIZAMIENTO. La velocidad de deslizamiento (Ec. 2a) es la diferencia que existe entre la velocidad de sincronismo y la velocidad del rotor, y el deslizamiento (Ec. 2.b) es la velocidad de deslizamiento expresada sobre una base en por unidad o en porcentaje. (Chapman, 2000, p.393) 𝑛𝑑𝑒𝑠 = 𝑛𝑠𝑖𝑛𝑐 − 𝑛𝑟 (Ec. 2. a) 𝑠=. 𝑛𝑠𝑖𝑛𝑐−𝑛𝑟 𝑛𝑠𝑖𝑛. (Ec. 2. b). El concepto de velocidad de deslizamiento se da gracias a que el rotor no puede girar a la misma velocidad de sincronismo, es decir a la velocidad del campo magnético del estator, ya que si esto sucediera las barras del rotor serian fijas con respecto al campo magnético, y por lo tanto no habría voltaje inducido, ni corriente por el rotor, como tampoco existiría campo magnético en el rotor, es decir no habría movimiento. 1.4.. FRECUENCIA DEL ROTOR. La frecuencia del rotor es distinta a la del estator gracias al deslizamiento, por lo tanto, puede ser expresada como: 𝑓𝑟 = 𝑠𝑓𝑒 (Ec. 3.) 1.5.. VELOCIDAD MECANICA O DEL ROTOR. La velocidad del rotor puede ser expresada en función de la velocidad sincrónica y el deslizamiento como: 𝑛𝑟 = (1 − 𝑠)𝑛𝑠𝑖𝑛𝑐 (Ec. 4) La velocidad angular wr también se puede expresar en función de la velocidad sincrónica angular wsin y el deslizamiento como: 𝑤𝑟 = (1 − 𝑠)𝑤𝑠𝑖𝑛𝑐 (Ec.5).
(7) 1.6.. PAR INDUCIDO. Se define como la fuerza que experimenta las bobinas conductoras de corriente, cuando se introducen en un campo magnético, esta fuerza tiende a hacer girar estas bobinas. También se dice que es el momento generado por la conversión de potencia eléctrica interna en potencia mecánica. (Chapman, 2000, p.406) Por lo que se puede obtener mediante la ecuación: 𝑇𝑖𝑛𝑑 = 1.7.. 𝑃𝑐𝑜𝑣. (Ec. 6 a). 𝑤𝑟. 𝑃𝐴𝐺. 𝑇𝑖𝑛𝑑 = 𝑤𝑠𝑖𝑛 (Ec. 6 b). PAR MAXIMO. El máximo par posible ocurre cuando la potencia en el entre hierro es máxima, puesto que la potencia en el entre hierro es igual a la potencia consumida en la resistencia R2/S, el par máximo inducido ocurrirá cuando la potencia consumida por esa resistencia es máxima. En la figura 2 se muestra el comportamiento del par inducido y la potencia convertida con respecto a la velocidad de un motor de inducción.. 𝑇𝑚𝑎𝑥 =. 3𝑉12 𝑛𝑠𝑖𝑛 ∗[𝑅1+√𝑅12 +(𝑋1+𝑋22 )] 60. 4𝜋∗. (Ec. 7). Fig.2 par inducido y potencia convertida vs velocidad (Chapman, S. (2000), Máquinas eléctricas). 1.8.. EFICIENCIA. Cuando la pérdida por rotación es igual a cero, la potencia de salida es igual a la potencia convertida, por lo tanto, la eficiencia del motor en condiciones ideales es: 𝜼=𝟏−𝒔. (Ec. 8a). 𝜂=. 𝑃𝑐𝑜𝑛𝑣 𝑃𝑒𝑛𝑡. (Ec. 8 b).
(8) 1.9.. RELACION DE POTENCIAS. 1.9.1. POTENCIA DE ENTRADA: 𝑃𝑖𝑛 = √3𝑉𝐹 𝐼𝐿 𝑐𝑜𝑠Ө (Ec. 9). 1.9.2. PERDIDAS DEL COBRE DEL ESTATOR: son las perdidas encontradas en los devanados del estator. 𝑃𝑆𝐶𝐿=3𝐼12 𝑅1 (Ec. 10) 1.9.3. POTENCIA DEL NUCLEO: es cierta cantidad de potencia que se pierde por histéresis y por corrientes parasitas en el estator. (Gc es la conductancia de la rama de magnetización, es decir, el inverso de Rc). (Chapman, 2000, p.403) 𝑃𝑛𝑢𝑐𝑙𝑒𝑜 = 3𝐸12 𝐺𝐶 (Ec.11) 1.9.4. POENCIA EN EL ENTREHIERRO: es la potencia que se transfiere al rotor de la maquina a través del entrehierro situado entre el rotor y el estator. 𝑃𝐴𝐺 = 𝑃𝑖𝑛 − 𝑃𝑆𝐶𝐿 − 𝑃𝑛𝑢𝑐𝑙𝑒𝑜. (Ec. 12 a). 𝑃𝐴𝐺 = 3𝐼22. 𝑅2 𝑆. (Ec. 12 b). 1.9.5. PERDIDAS EN EL COBRE DEL ROTOR: es la porción de potencia transferida al rotor que se disipa en el cobre del rotor. (Chapman, 2000, p.403) 𝑃𝑅𝐶𝐿=3𝐼22 𝑅2 (Ec. 13 a). 𝑃𝑅𝐶𝐿=𝑆∗𝑃𝐴𝐺 (Ec. 13 b). 1.9.6. POTENCIA CONVERTIDA: es la que se convierte de potencia eléctrica a mecánica 𝑃𝑐𝑜𝑣 = 𝑃𝐴𝐺 − 𝑃𝑅𝐶𝐿. (Ec. 14 a). 𝑃𝑐𝑜𝑣 = 3𝐼22 𝑅2(. 1−𝑆 𝑆. ) (Ec. 14 b). 1.9.7. POTENCIA DE SALIDA: es la que resulta de la diferencia entre la potencia convertida, las potencias por rozamiento propio y por rozamiento con el aire y las potencias misceláneas. (Chapman, 2000, p.403) 𝑃𝑜𝑢𝑡 = 𝑃𝑐𝑜𝑛𝑣 − 𝑃𝐹&𝑉 − 𝑃𝑚𝑖𝑠𝑐. (Ec. 15).
(9) 1.10.. CIRCUITO EQUIVALENTE DE UN MOTOR DE INDUCCION. Fig. 3 circuito equivalente motor de inducción (Chapman, S. (2000), Máquinas eléctricas) En la figura 3 se muestra un circuito equivalente por fase de un motor de inducción, este es muy parecido al modelo de un transformador, gracias a el fenómeno de inducción que presenta este tipo de máquina. Al igual que en los transformadores, existe una resistencia e inductancia en los devanados de la máquina, para el estator la resistencia será denominada R1 y la reactancia X1, estas componentes aparecen en la entrada de la máquina. Así mismo, existe una rama de magnetización que representa el núcleo de la máquina, las componentes de esta son Rc y XM. E1 es el voltaje inducido en el estator y Er es el voltaje inducido en el rotor; en el rotor la resistencia y reactancia son llamadas RR y XR, la resistencia del rotor es constante, independientemente del deslizamiento; la reactancia del rotor se afecta por el deslizamiento. Como la reactancia del rotor depende de la inductancia del rotor y de la frecuencia de voltaje y corriente del rotor, se puede expresar ésta como: 𝑋𝑅 = 𝑠𝑋𝑅0. (Ec. 16). Donde XR0 es la reactancia del rotor en estado bloqueado. Cuando se excita un motor monofásico con una fuente trifásica equilibrada, las corrientes de fase deben ser iguales en magnitud y desfasadas 120° eléctricos. Cuando en las bobinas del estator se aplica un voltaje, en los devanados del rotor se induce una tensión, por lo tanto, cuanto mayor sea el movimiento de los campos magnéticos del rotor y el estator, mayor será el voltaje y la frecuencia en el rotor. El mayor movimiento relativo ocurre cuando el rotor se encuentra bloqueado, en esta condición se induce el máximo voltaje y frecuencia del rotor; por el contrario, el voltaje cero y la frecuencia cero, ocurren cuando el motor se mueve a la misma velocidad que el campo magnético del estator, es decir no hay movimiento relativo. La magnitud y frecuencia del voltaje inducido en el rotor a cualquier velocidad es proporcional al deslizamiento del rotor. En condiciones del rotor bloqueado la magnitud del voltaje inducido del rotor será ER0, entonces la magnitud del voltaje inducido para cualquier deslizamiento estará dada por la ecuación 17. 𝐸𝑅 = 𝑠𝐸𝑅0 El flujo de corriente en el rotor será:. (Ec. 17).
(10) 𝐼𝑅 = 𝑅 𝐼𝑅 = 𝑅. 𝐸𝑅. (Ec. 18). 𝑅 +𝑗𝑋𝑅. 𝐸𝑅. (Ec. 19). 𝑅 +𝑗𝑠𝑋𝑅0. 𝐼𝑅 = 𝑅𝑅 𝑠. 𝐸𝑅0 +𝑗𝑋𝑅0. (Ec. 20). De acuerdo con la ecuación anterior (Ec. 19) la impedancia equivalente del rotor será: 𝑍𝑅𝑒𝑞 =. 𝑅𝑅 𝑠. + 𝑗𝑋𝑅0 (Ec. 21). Para el circuito equivalente por fase de un motor de inducción, se debe transferir el circuito del rotor al estator, o viceversa Para transferir del rotor al estator se debe tener en cuenta la relación efectiva de vueltas de un motor de inducción aff, el voltaje del rotor es 𝐸1 = 𝐸𝑅′ = 𝑎𝑓𝑓 ∗ 𝐸𝑅0 (Ec. 22) la corriente rotórica es 𝐼. 𝐼2 = 𝑎𝑅0. (Ec. 23). 𝑓𝑓. Y la impedancia rotórica es 𝑅. 𝑍2 = 𝑎𝑓𝑓 2 ∗ ( 𝑠𝑅 + 𝑗𝑋𝑅0). (Ec. 24). Fig. 4 circuito equivalente, incluyendo la Rconv. (Chapman, S. (2000), Máquinas eléctricas). En la figura 4 se incluye una resistencia Rconv la cual expresa la potencia convertida del motor. 𝑅𝑐𝑜𝑛𝑣 =. 𝑅2 𝑠. 1. − 𝑅2 = 𝑅2(𝑠 − 1). 𝑅𝑐𝑜𝑛𝑣 = 𝑅2 ∗ (. 1−𝑠 𝑠. ). (Ec. 25). (Ec. 26).
(11) MOTOR ASINCRONO JAULA DE ARDILLA DL1021 TENSION CORRIENTE VELOCIDAD FRECUENCIA 220/380 V Δ/Y 4,4/2,6 A Δ/Y 3460 rpm 60 Hz CLASE DE GRADO DE POTENCIA F.P. AISLAMIENTO PROTECCION 1,1 Kw 0,89 F IP 54. MOTOR ASINCRONO ROTOR DEVANADO DL 1022 TENSION CORRIENTE VELOCIDAD FRECUENCIA 220/380 V 4,9/2,85 A 3460 rpm 60 Hz Δ/Y Δ/Y CLASE DE GRADO DE POTENCIA F.P. AISLAMIENTO PROTECCION 1,1 Kw 0,85 F IP 44 TENSION DE EXCITACIÓN CORRIENTE DE EXCITACIÓN 400 V 2 A.. 2.. PRACTICA 1: OBTENCION DEL MODELO DEL MOTOR DE INDUCCION JAULA DE ARDILLA Y ROTOR DEVANADO. 2.1. OBJETIVOS • Hacer uso de las diferentes pruebas para hallar experimentalmente el modelo eléctrico de un motor de inducción. • Utilizar los equipos y elementos del laboratorio de máquinas eléctricas para obtener el modelo de la máquina de inducción. • Afianzar los conceptos teóricos adquiridos en el aula de clase, con pruebas experimentales para encontrar el modelo eléctrico de un motor de inducción. • Identificar el comportamiento de la corriente de arranque del motor, para cualquier tensión aplicada.. 2.2. PRUEBA DE RESISTENCIA DEL ESTATOR. Esta prueba se efectúa para determinar la resistencia de cada devanado por fase del estator. Consiste en aplicar una tensión DC en los devanados del estator parta obtener los valores de las variables de tensión y corriente y aplicar ley de ohm para hallar le valor de la resistencia. 2.2.1. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar antes de realizar la prueba. B. Para iniciar la prueba conecte el circuito que se ilustra en la figura 5..
(12) Fig. 5 Conexión eléctrica para hallar la resistencia de estator. Aplicar tensión reducida a los devanados del estator. Esta tensión no debe ser mayor a 2 Vdc, ya que los devanados sufren calentamiento, por lo tanto, se puede producir daño en los mismos. Tome la medición de corriente y tensión en cada una de las fases. C. Calcular la resistencia de cada una de las fases 𝑅𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑎 = FASE. CORRIENTE I(A). 𝑉𝑚𝑒𝑑𝑖𝑑𝑎 𝐼𝑚𝑒𝑑𝑖𝑑𝑎. (Ec. 27). TENSION V(V). R CALCULADA (Ω). U V W Tabla 1. Valores de las variables de los devanados de estator. D. Hallar el valor por fase de la resistencia de estator con la siguiente ecuación: 𝑅𝑚 =. 𝑅𝑢+𝑅𝑣+𝑅𝑤 3. (Ec. 28). NOTA: LA RESISTENCIA QUE SE ENCUENTRA EN LAS ESPECIFICACIONES DE LA MAQUINA, PUEDE SER USADA PARA VERIFICAR LA MEDICION..
(13) Sea Rm el valor con cc de la resistencia entre dos terminales cualesquiera del motor; en caso de no tener acceso a los terminales de cada devanado por fase, si no contar con una conexión en delta o estrella, la resistencia por fase del motor será: R1 =0,5Rm Para conexión estrella. R1 = 1,5Rm Para conexión delta. Esto también dependerá de la clase del motor, teniendo en cuenta que cada clase tiene unos parámetros específicos para hallar R1 y R2.. 2.2.2. EQUIPOS REQUERIDOS • Banco de alimentación DC DL1013M3 • Conectores • Motor de inducción DL1024R • Multímetro Fluke 179 • Pinza amperométrica. 2.3.PRUEBA DE ROTOR BLOQUEADO O ROTOR FIJO En esta prueba el rotor se mantiene estacionario aplicando al eje un par externo contrario al par motor, es decir, S=1; con el objetivo de hallar la impedancia del rotor referida al estator de la máquina. Esta prueba es similar a la prueba de corto circuito en un transformador.. 2.3.1. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar antes de realizar la prueba. B. Conectar el circuito que se ilustra en la figura 6, el rotor de la máquina se va encontrar. Fig.6. Conexión de la prueba de rotor bloqueado..
(14) bloqueado por medio de un freno mecánico ubicado en el eje, aplicar tensión reducida al circuito hasta obtener la corriente nominal de trabajo, tener presente la conexión delta o Y, ya que para cada conexión la corriente nominal cambia. Realizar medición de tensión (Vrb), corriente (Irb), potencia (Prb) y factor de potencia en cualquiera o en todas las fases. Recordar que se va hallar el modelo eléctrico por fase, por lo tanto, con la medición de una sola fase es suficiente. CONEXIÓN DELTAL O TRIANGULO TENSION Vrb CORRIENTE Irb POTENCIA Prb (V) (A) (W). F.P.. Tabla 2. Valores medidos prueba de rotor bloqueado. CONEXIÓN Y O ESTRELLA TENSION Vrb CORRIENTE Irb POTENCIA Prb (V) (A) (W). F.P.. Tabla 3. Valores medidos prueba de rotor bloqueado. C. De acuerdo con el circuito equivalente aproximado por fase, la impedancia total en serie es Ž𝑒 = 𝑅1 + 𝑅2 + 𝑗(𝑋1 + 𝑋2) = 𝑅𝑒𝑞 + 𝑗𝑋𝑒𝑞 (Ec. 29) Y conociendo el valor de voltaje, corriente y potencia por fase en condiciones de rotor bloqueado, hallar el valor de Req, es importante tener presente la conexión Y o Delta, para saber con exactitud la tensión de fase. 𝑃𝑟𝑏. 𝑅𝑒𝑞 = 𝐼𝑟𝑏2. (Ec. 30). Siendo R1 un valor ya conocido (hallada en la prueba de resistencia de estator), hallar el valor de R2 𝑅2 = 𝑅𝑒𝑞 − 𝑅1 (Ec. 31) Hallar la magnitud de la impedancia equivalente y la reactancia equivalente. 𝑍𝑒𝑞 =. 𝑉𝑟𝑏 𝐼𝑟𝑏. (Ec. 32). 𝑋𝑒𝑞 = √𝑍𝑒𝑞 2 − 𝑅𝑒𝑞 2 (Ec. 33).
(15) NOTA: LAS REACTANCIAS X1 Y X2 SE SUPONEN IGUALES, EN CASO DE CONOCER LA CLASE DEL MOTOR SE APLICA LA RELACION ESPECIFICA PARA ESTÁ. X1=X2=0.5Xeq 2.3.2. EQUIPOS REQUERIDOS • Banco de alimentación variable AC DL1013M3 • Conectores • Motor de inducción • Multímetro Fluke 179 • Pinza amperométrica • Analizador de potencia AEMC 8220 • Freno mecánico. APLICACIÓN ADICIONAL DE LA PRUEBA Con los valores de tensión y corriente obtenidos en esta prueba, se puede hallar el valor de la corriente de arranque del motor a tensión nominal. En la figura 7 se muestra la gráfica de corriente de rotor bloqueado vs tensión de rotor bloqueado de un motor de inducción, ésta al tener un comportamiento lineal se puede hallar el valor de la corriente de arranque cuando la tensión del motor es la nominal.. CORRIETNE DE ARRANQUE [A]. CORRIENTE DE ARRANQUE A TENSION REDUCIDA 3. 2,5. 2,5. 2 1,6. 2 1,5. 0,9. 1,1. 1 0,5 0 0 0. 20. 40. 60. 80. 100. TENSION DE ALIMENTACION [V]. Fig. 7 Corriente de rotor bloqueado vs Tensión de rotor bloqueado de un motor de inducción Para hallar el valor de la corriente de arranque se hace uso de la ecuación de la recta. 𝑦 = 𝑚𝑥 + 𝑏. (Ec. 34).
(16) CORRIENTE DE ARRANQUE A TENSION NOMINAL 12,27. CORRIENTE [A]. 12 10 8 6 2,5. 4 2 0 0 0. 50. 100. 150. 200. 250. 300. 350. 400. TENSION [V]. Fig. 8 Corriente de arranque vs Tensión nominal de un motor de inducción.. Se observa que a la tensión nominal del motor 220Vac, la corriente del motor son aproximadamente 7.4A, y a una tensión de alimentación de 380Vac, la corriente de arranque del motor seria 12,27A, si se observa la placa característica del motor la corriente nominal del motor a 220 Vac es de 4.4A y a 380Vac es de 2.6A, es decir las corrientes de arranque son de aproximadamente de 3 a 6 veces la nominal. Conociendo los valores de las resistencias e impedancias del modelo eléctrico del motor (que se encuentran con las pruebas eléctricas), es posible hallar teóricamente la corriente de arranque del motor a diferentes valores de alimentación, usando la ecuación 34, con la expresión aproximada de impedancia equivalente en función de S, teniendo en cuenta que en el arranque el deslizamiento es 1; al obtener los valores de la corriente de arranque se podrán comparar las magnitudes de los valores teóricos con los experimentales.. 𝑉𝑠. 𝐼𝑅 = 𝑅1+𝑅2+𝑗(𝑋1+𝑋2). (Ec. 34).
(17) VALORES TEORICOS. TENSION DE VALORES ALIMENTACION EXPERIMENTALES Vs. 1.2. 0.9. 37.3. 1.3. 1.1. 42. 1.72. 1.6. 53.4. 2.03. 2.0. 62.9. 2.50 2.5 77.4 Tabla 4. Valores teóricos y experimentales de corriente de arranque de un motor de inducción Es posible observar que la diferencia entre los valores experimentales y teóricos no es grande, hay que recordar que las mediciones realizadas en el laboratorio cuentan con una incertidumbre, gracias a los equipos de medición utilizados en las pruebas.. 2.4.PRUEBA EN VACIO En esta prueba el motor trabaja libremente sin carga, es decir S=0; determinando de esta forma la rama de magnetización. 2.4.1. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Conectar el circuito que se ilustra en la figura 9, la máquina girara en vacío por lo cual se debe aplicar la tensión nominal de la máquina, tener presente la conexión delta o Y, con el objetivo de conocer la tensión que se debe aplicar.. Fig. 9. Conexión de la prueba en vacío de un motor de inducción. Realizar medición de tensión (Voc), corriente (Ioc), potencia (Poc) y factor de potencia en cualquiera o en todas las fases..
(18) CONEXIÓN DELTAL O TRIANGULO TENSION Voc CORRIENTE Ioc POTENCIA Poc (V) (A) (W). F.P.. Tabla 5. Valores medidos prueba en vacío.. TENSION Voc (V). CONEXIÓN Y O ESTRELLA CORRIENTE POTENCIA Poc Ioc (W) (A). F.P.. Tabla 6. Valores medidos prueba en vacío. Hallar las resistencias de pérdidas en el núcleo (tener presente la conexión Y o Delta, para saber con exactitud la tensión de fase) 𝑅𝑓𝑒 =. 𝑉𝑜𝑐 2 𝑃𝑜𝑐. (Ec. 35). Para hallar la reactancia de magnetización haga uso de las siguientes expresiones 𝑆𝑜𝑐 = 𝑉𝑜𝑐 ∗ 𝐼𝑜𝑐. (Ec. 36). 𝑄𝑜𝑐 = √𝑆𝑜𝑐 2 − 𝑃𝑜𝑐 2 𝑋𝑚𝑎𝑔 =. 𝑉𝑜𝑐 2. 2.4.2. EQUIPOS REQUERIDOS • Banco de alimentación variable AC DL1013M3 • Conectores • Motor de inducción DL1024R • Multímetro Fluke 179 • Pinza amperométrica • Analizador de potencia AEMC 8220. 𝑄𝑜𝑐. (Ec. 37). (Ec. 38).
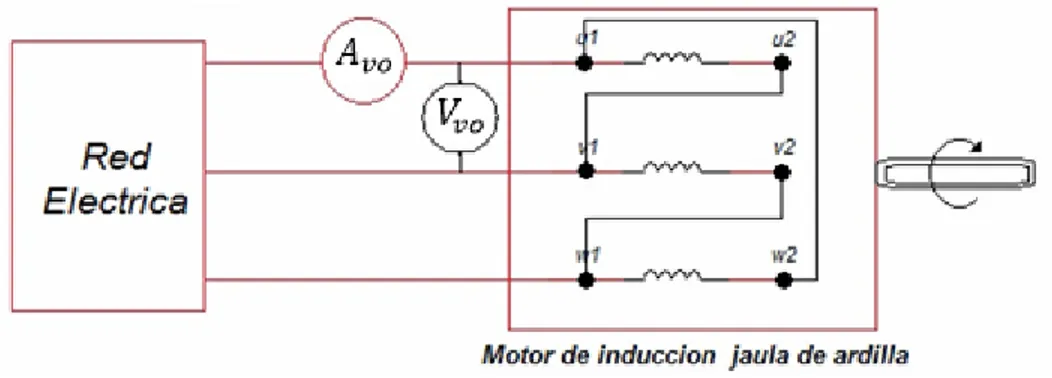
(19) 3. PRACTICA 2: MOTOR DE INDUCCION JAULA DE ARDILLA CON CARGA La prueba se realiza comenzando desde la condición sin carga, ésta se incrementa lentamente y se registran las lecturas correspondientes a la velocidad del motor, el par en el eje, la potencia de entrada, el voltaje aplicado y la corriente de línea. 3.1. OBJETIVOS • Determinar experimentalmente las características velocidad-par de un motor de inducción jaula de ardilla. • Realizar las gráficas de comportamiento del motor de inducción jaula de ardilla del laboratorio de máquinas eléctricas. • Hacer uso de los datos hallados, para conocer el comportamiento de cargabilidad del motor de inducción jaula de ardilla. 3.2. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Conectar el circuito que se ilustra en la figura 10, se debe acoplar al eje del motor el freno electromagnético, con el fin de aumentar la carga en el eje del motor de inducción, encender el motor de inducción a tensión nominal 220/380 Vac dependiendo la conexión delta o Y, en el arranque el freno electromagnético debe estar sin alimentación, es decir, el motor girará en vacío.. Fig.10. conexión para la prueba de motor de inducción con carga Bajo esta condición, realizar las mediciones de tensión, corriente de línea, potencia, par, velocidad y factor de potencia. Aumentar gradualmente la carga, amplificando la tensión en el freno y realizar las mediciones, recordar no superar la corriente máxima de trabajo del motor, tener en cuenta que está cambia dependiendo de la conexión delta o Y..
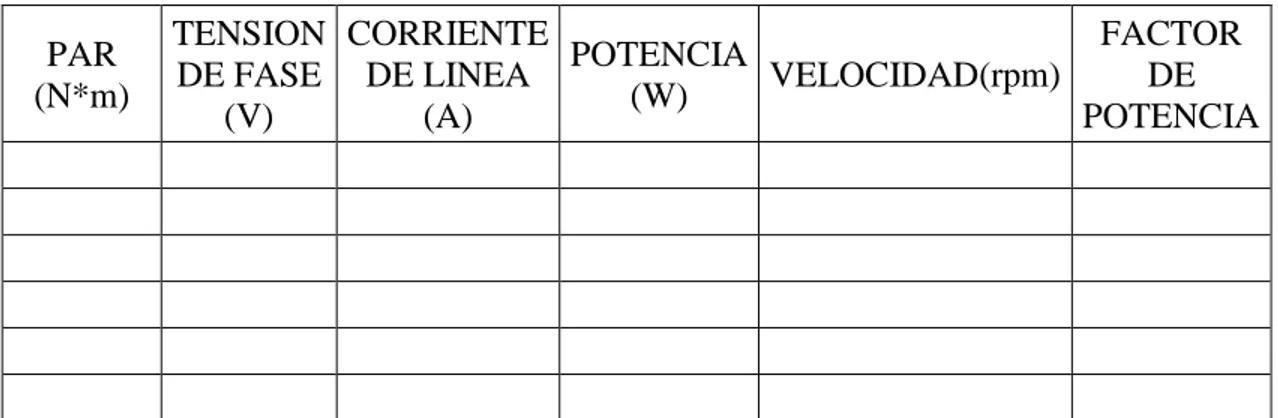
(20) PAR (N*m). TENSION CORRIENTE FACTOR POTENCIA DE FASE DE LINEA VELOCIDAD(rpm) DE (W) (V) (A) POTENCIA. Tabla 7. Datos obtenidos en la prueba de motor jaula de ardilla. Con estos datos medidos graficar: • Par vs Velocidad. Para encontrar el par de arranque use la ecuación 39 y el par máximo con la ecuación 7 3∗𝑉12 ∗𝑅2. 𝑇𝑎𝑟𝑟 = [(𝑅1+𝑅2)2 +(𝑋1+𝑋2)2 ]∗𝑤𝑠 (Ec. 39) • • •. De lo contrario solo será graficado el par de trabajo de la máquina. Corriente vs Velocidad Factor de potencia vs Velocidad Par vs Deslizamiento. Las curvas de comportamiento que se esperan encontrar para un motor de inducción son como las que se muestran en las figuras 11, 12, 13 y 14.. Par máximo. Par de arranque. Par de trabajo. Fig. 11 Curva de par vs velocidad de un motor de inducción jaula de ardilla..
(21) CORRIENTE VS VELOCIDAD CORRIENTE [A]. 4 3 2 1 0 3400. 3450. 3500. 3550. 3600. VELOCIDAD[rpm]. Fig. 12 Curva de corriente vs velocidad de un motor de inducción jaula de ardilla.. Fig. 13 Curva de Factor de Potencia vs velocidad de un motor de inducción jaula de ardilla.. PAR VS DESLIZAMIENTO. 10 8 6 4. 2 0 0. 0,2. 0,4. 0,6. 0,8. 1. 1,2. Fig. 14 Curva de par vs deslizamiento de un motor de inducción jaula de ardilla..
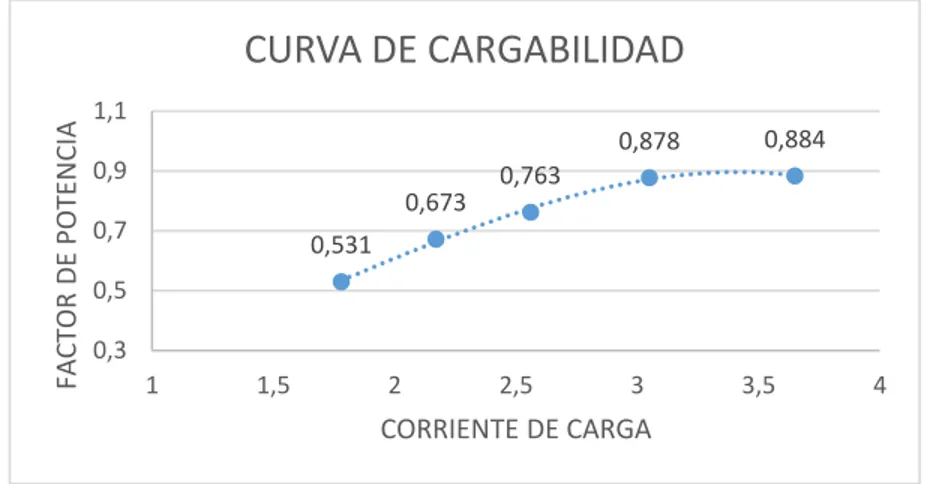
(22) APLICACIÓN ADICIONAL DE LA PRUEBA Con los valores de corriente y factor de potencia obtenidos en la práctica, se puede hallar la curva de comportamiento del FP del motor de inducción jaula de ardilla respecto al nivel de carga, la cual muestra el comportamiento del factor de potencia del motor al ir aumentando carga.. FACTOR DE POTENCIA. CURVA DE CARGABILIDAD 1,1 0,878 0,9 0,673. 0,7. 0,884. 0,763. 0,531. 0,5 0,3 1. 1,5. 2. 2,5. 3. 3,5. 4. CORRIENTE DE CARGA. Fig. 15 Curva de cargabilidad de un motor de inducción jaula de ardilla. Como se puede observar en la figura 15, el factor de potencia se incrementa en la misma medida que la corriente de carga, es decir, a mayor par de carga, mayor es el factor de potencia de la máquina, esto se debe a que entre mayor deslizamiento menor es la impedancia equivalente del motor lo que equivale a mayor factor de potencia. Esta grafica puede ser útil para corregir el factor de potencia en una industria ya que, si se cuentan con muchos reactivos, se puede aumentar la carga de esta máquina y disminuir la inyección de reactivos a la red.. 3.3. EQUIPOS REQUERIDOS • Banco de alimentación variable AC DL1013M3 • Conectores • Motor de inducción jaula de ardilla DL1021 • Multímetro Fluke 179 • Pinza amperométrica • Analizador de potencia AEMC 8220 • Módulo de medición digital del par DL2006 C • Freno electromagnético DL1019M.
(23) 4. PRACTICA 3: MOTOR DE INDUCCIÓN ROTOR DEVANADO CON CARGA La prueba se realiza comenzando desde la condición sin carga, ésta se incrementa lentamente y se registran las lecturas correspondientes a la velocidad del motor, el par en el eje, la potencia de entrada, el voltaje aplicado y la corriente de línea. 4.1. OBJETIVOS • Determinar experimentalmente las características velocidad-par de un motor de inducción de rotor devanado. • Realizar las gráficas de comportamiento del motor de inducción de rotor devanado del laboratorio de máquinas eléctricas. 4.2. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Conectar el circuito que se ilustra en la figura 16, acople el freno electromagnético al motor; con el objetivo de controlar la corriente de arranque de la máquina, variar gradualmente el reóstato de arranque de este motor comenzando desde el valor máximo hasta el valor mínimo que es cero ohm. Realizar la medición de tensión, corriente de línea, potencia, par, velocidad y factor de potencia, en condición sin carga. Aumentar gradualmente la carga, elevando la tensión en el freno y realizando nuevamente las mediciones. No olvidar tener en cuenta la conexión delta o Y para conocer los límites de tensión y corriente del motor y de esta manera no sobrepasarlos.. Fig. 16. Conexión prueba de rotor devanado con carga..
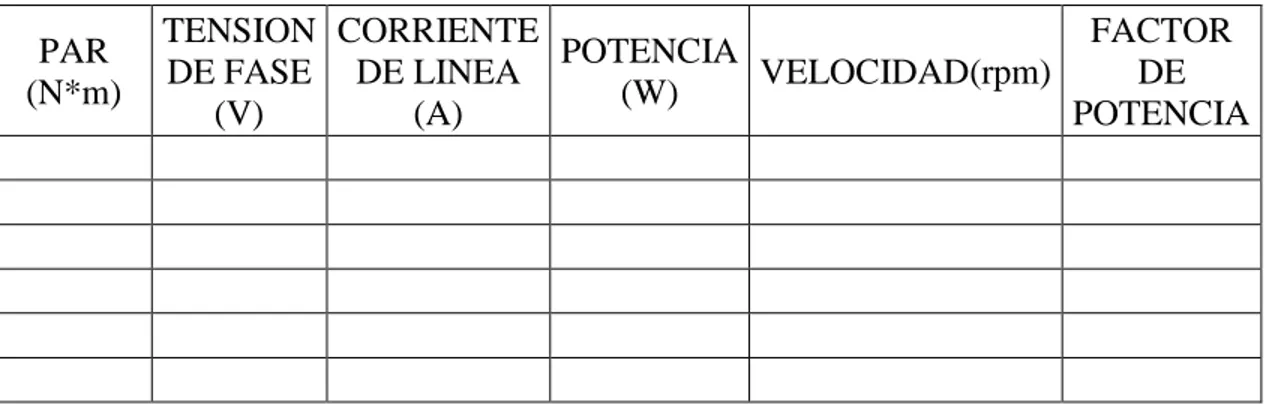
(24) PAR (N*m). TENSION CORRIENTE FACTOR POTENCIA DE FASE DE LINEA VELOCIDAD(rpm) DE (W) (V) (A) POTENCIA. Tabla 8. Valores obtenidos de la prueba de motor jaula de ardilla con carga. Con estos datos graficar: • Par vs Velocidad, no olvidar hallar el par de arranque y el par máximo del motor (ecuaciones 7 y 39), para obtener la curva completa, de lo contrario, solo será graficado el par de trabajo del motor. • Corriente vs Velocidad • Factor de potencia vs Velocidad • Par vs potencia Las curvas características de este motor son Figuras 17, 18, 19 y 20. PAR VS VELOCIDAD PAR [N*m]. 20 15 10 5 0 0. 1000. 2000. 3000. 4000. VELOCIDAD[rpm]. Fig. 17 Curva de par vs velocidad de un motor de inducción anillos rozantes..
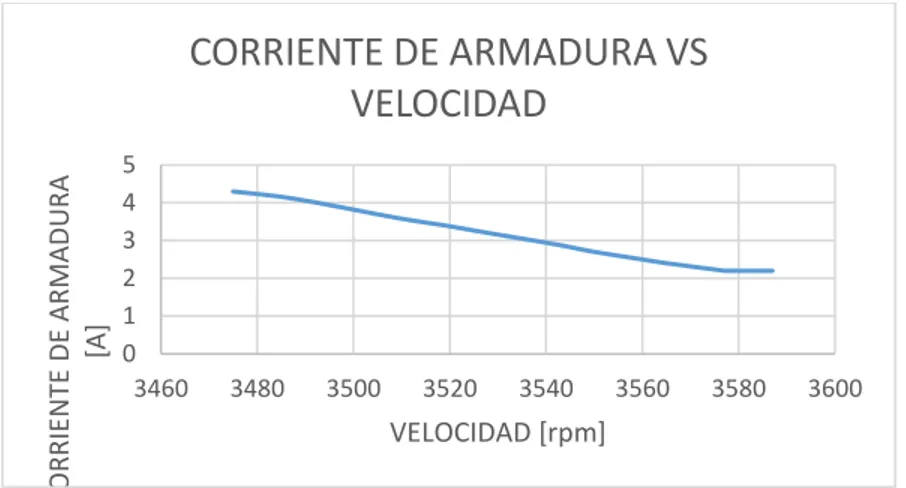
(25) CORRIENTE DE ARMADURA [A]. CORRIENTE DE ARMADURA VS VELOCIDAD 5 4 3 2 1 0 3460. 3480. 3500. 3520. 3540. 3560. 3580. 3600. VELOCIDAD [rpm]. Fig. 18 Curva de corriente vs velocidad motor de inducción anillos rozantes.. TFACTOR DE POTENCIA. FACTOR DE POTENCIA VS VELOCIDAD 1 0,8 0,6 0,4 0,2 0 3460. 3480. 3500. 3520. 3540. 3560. 3580. 3600. VELOCIDAD [rpm]. Fig.19 Curva factor de potencia vs velocidad motor de inducción anillos rozantes.. PAR VS POTENCIA DE SALIDA PAR [N*m]. 4 3 2 1 0 0. 500. 1000. 1500. POTENCIA DE SALIDA [W]. Fig.20 Curva par vs potencia de salida de un motor de inducción anillos rozantes..
(26) 4.3. EQUIPOS REQUERIDOS • Banco de alimentación variable AC DL1013M3 • Conectores • Motor de inducción rotor devanado (anillos rozantes) DL1022 • Multímetro Fluke 179 • Pinza amperométrica • Analizador de potencia AEMC 8220 • Módulo de medición digital del par DL2006 C • Freno electromagnético DL1019M 5. PRACTICA 4: CORRIENTE DE ARRANQUE DE UN MOTOR DE INDUCCIÓN ROTOR DEVANADO La corriente de arranque en los motores es aproximadamente de 4 a 5 veces su corriente nominal, esta corriente puede causar daños en los devanados del motor por lo cual se busca reducirlas hasta que el motor alcance su corriente de trabajo, en este tipo de motor gracias a sus anillos rozantes solo es necesario agregar resistencias para que la corriente sea reducida. 5.1. OBJETIVOS • Observar experimentalmente la variación de la corriente de arranque del motor de rotor devanado, conectando diferentes valores de resistencia a los anillos rozantes de la máquina. • Analizar la reducción de la corriente en cada cambio de resistencia. • Comparar las corrientes de arranque entre un motor de inducción jaula de ardilla y un motor de inducción de rotor devanado. • Evidenciar el comportamiento del motor al insertar resistencias externas en el rotor, en condición de trabajo. 5.2.PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Conectar el circuito que se ilustra en la figura 21, como la intención es observar la reducción de la corriente al insertar diferentes valores de resistencia en el rotor, ubique el reóstato en el valor máximo 282.3Ω, realizar el arranque de la máquina en tensión nominal y medir la corriente de arranque, apagar el motor y variar el reóstato a la siguiente posición encender nuevamente el motor y medir la corriente de arranque, realizar este procedimiento para cada posición del reóstato. Es importante la conexión delta o Y para aplicar la tensión nominal 220/380 Vac..
(27) Fig.21 Conexión de reóstato de arranque a un motor de rotor devanado. RESISTENCIA DEL REOSTATO CORRIENTE DE ARRANQUE (A) R1 ≈282.3 Ω R2≈165.0 Ω R3≈85.5 Ω R4≈30.8 Ω R5≈0 Ω Tabla 9. Corriente de arranque para cada valor de resistencia. APLICACIÓN ADICIONAL DE LA PRUEBA Como se pude en observar en la prueba anterior, al adicionar resistencias externas al rotor (resistencias rotoricas), por medio de un reostato, la corriente del inducido disminuye, pero tambien se ve afectado el deslizamiento en el que ocurre el par maximo de la máquina, ademas del par de arranque, puesto que el deslizamiento es directamente proporcional a la resistencia del rotor R2. Estas resistencias no pueden ser mucho mayores que la resistencia del estator, ya que exceden el deslizamiento maximo de la maquina, ya que no son utilizadas solo para el arranque de la máquina, si no durante todo el tiempo de trabajo del motor. 𝑠=. 𝑅2 √𝑅12 +(𝑋1+𝑋2)2. (Ec. 40).
(28) INSERCION DE RESISTENCIAS EXTERNAS EN EL ROTOR 18 16 14. PAR[N*m]. 12. R2. 10. R2+68 ohms. 8. R2+56ohms R2+47ohms. 6. R2+39ohms. 4. R2+33ohms. 2 0 0. 300 600 900 1200 1500 1800 2100 2400 2700 3000 3300 3600. VELOCIDAD [rpm]. Fig.22 Efecto en el par de arranque y par maximo al insertar resistencias externas en el rotor. Como se observa en la figura 22 al insertar resistencias en al rotor, el par maximo se alcanza a una velocidad menor, pero éste permanece constante, mientras que el par de arranque a medida que la resistencia es mayor el par de arranque disminuye. Una aplicación importante de este fenomeno, se da cuando el motor tiene acoplada una carga muy grande y desde su arranque debe moverla, por lo tanto necesita que el par maximo se efectue desde el arranque, para de esta forma no se presenten sobrecalentamientos o daños en el motor. 5.3. EQUIPOS REQUERIDOS • Banco de alimentación variable AC DL1013M3 • Conectores • Motor de inducción rotor devanado (anillos rozantes) DL1022 • Multímetro Fluke 179 • Pinza amperométrica • Módulo de cargas y reóstatos DL 1017.
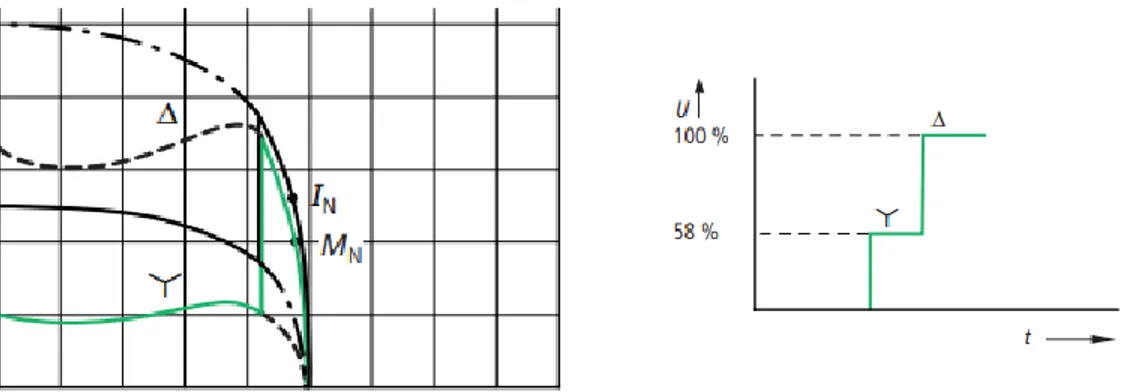
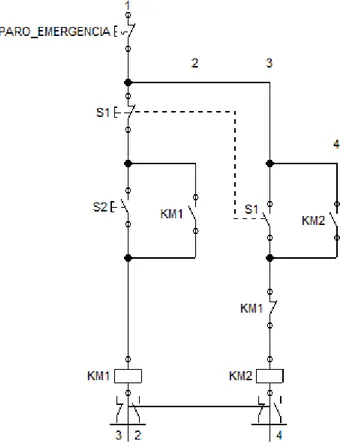
(29) 6. OTRAS FORMAS DE ARRANQUE DE UN MOTOR 6.1. ARRANQUE DE MOTORES DE INDUCCION ESTRELLA TRIANGULO El objetivo de este tipo de arranque es reducir la corriente de arranque a 2 veces la corriente nominal, ya que en un arranque directo la corriente es de aproximadamente 5 veces la nominal. El motor se alimenta directamente a la red, pero conectado en estrella, de este modo se reduce la tension aplicada, y por tanto, la corriente y el par de arranque tambien disminuye, cuando se alcanza el punto de trabajo en Y, se conecta en triangulo, cuando este pasa se produce un pico de corriente, pero no alcanza a ser tan grande como la que se tendria en un arranque directo. Acontinuacion se muestra un esquema sencillo, usado para este tipo de arranque, en donde se usan conntactores para hacer el cambio de conexión.. Fig. 23 Esquema de conexión arranque estrella triangulo. (Moeller, 2006, Manual de esquemas). Fig. 24 curva de corriente vs velocidad y grafica de corriente del arranque estrella-triangulo. (Moeller, (2006) Manual de esquemas). 6.2. ARRANQUE DE MOTORES DE INDUCCION POR AUTOTRANSFORMADOR. Este arranque es el mas costoso pero es el metodo que proporciona mayor par por amperio reducido, la corriente de linea se reduce en proporción con el cuadrado de la reduccion de la.
(30) tensión, una vez el motor alcanzala velocidad nominal, el autotranformador se elimina del circuito, aplicandose la tension completa en las terminales del motor.. Fig. 25 Curvas de arranque y esquema de conexión por autotransformador. (Liwschitzgarik,1978,Maquinas de corriente alterna) 6.3 ARRANQUE DE MOTORES DE INDUCCION CON ARRANCADOR SUAVE El motor arranca prácticamente sin sacudidas. La reducción de la tensión provoca una reducción cuadrática del par con relación al par de arranque normal del motor. Los arrancadores suaves son especialmente adecuados para el arranque de cargas con un curso cuadrático de la velocidad o del par.. Fig. 26 Esquema de conexión y grafica de par y corriente de arranque con variador suave. (Moeller, (2006) Manual de esquemas).
(31) PREGUNTAS • • • • •. ¿Cómo cambia el par de un motor de inducción cuando cambia la carga? ¿Cuánto par puede suministrar (en porcentaje) un motor de inducción en condicion de arranque? ¿Cuanto cae la velocidad de un motor de inducción cuando se carga el eje? ¿ Cuales son la ventajes de un motor jaula de ardilla respecto a un motor de rotor devanado? Si se aumenta la resistencia del rotor ¿Qué inplicaciones tiene en el par de arranque y en el par maximo del motor?.
(32) MOTORES MONOFÁSICOS DE INDUCCIÓN 7. Introducción En su forma básica un motor monofásico de inducción consiste en una máquina asíncrona de jaula de ardilla cuyo devanado del estator es monofásico. En este tipo de motores al introducir corriente alterna en el estator crea un campo magnético distribuido senoidalmente y de tipo pulsante, lo que equivale a tener dos campos magnéticos giratorios iguales, pero en sentido contrario, que equivalen al comportamiento de una maquina polifásica. Este campo magnético induce corrientes en el rotor, tal y como en el secundario de un transformador, de tal forma que el par de rotación originado en las dos partes del devanado del rotor, con el campo inductor del estator son opuestos, por lo cual el par resultante es cero. Si el motor gira a una velocidad n, el deslizamiento 𝑠𝑑 del campo giratorio directo (el que gira en el mismo sentido que el motor) se puede expresar como. 𝑠𝑑 =. 𝑛1 −𝑛 𝑛1. =1−. 𝑛 𝑛1. =𝑠. (Ec. 41). y el deslizamiento 𝑠𝑖 del campo inverso (el que gira en sentido contrario al del eje del motor) esta expresado por. 𝑠𝑖 =. (−𝑛1 )−𝑛 (−𝑛1 ). =1+. 𝑛 𝑛1. =2−𝑠. (Ec. 42). Fig.27 Curva Par-velocidad de un motor monofásico de inducción. (Fraile, J (2003), Máquinas eléctricas).
(33) Como el par inverso Mi se opone al par directo Md, este motor consume más corriente que si sólo actuase un único campo giratorio. 7.1. CIRCUITO EQUIVALENTE Se puede considerar que el motor monofásico es igual a tener dos motores trifásicos iguales cuyos rotores están en el mismo eje y sus estatores estas conectados en serie, de esta forma los campos magnéticos creados giran en el mismo espacio, pero en sentido contrario, gracias a la teoría de los dos campos giratorios.. Fig. 28 Equivalencia de un motor monofásico con dos trifásico que giran en sentidos contrarios. (Fraile, J (2003), Máquinas eléctricas) Si el rotor se encuentra detenido el circuito equivalente se la el que se muestra en la figura 29 a, este circuito es igual al de un motor asincrono trifasico con S=0. El circuito equivalente que se muestra en la figura 29 b, corresponde con el descrito en la figura 8, que consiste en dos partes iguales conectadas en serie, cada una corresponde a un campo giratorio. E 1d y E1i son las tensiones inducidas en el estator debidas a cada campo. Por lo que la tension inducida total en el estator será 𝐸1 = 𝐸1𝑑 + 𝐸1𝑖 (Ecu. 522).
(34) Fig. 29 Circuito equivalente de un motor monofásico de inducción. (Fraile, J (2003), Máquinas eléctricas) Para solucionar de cierta manera, el par de arranque nulo, existen variantes de este motor que consiguen superar esta limitante, habiendo que el motor se comporte como un motor bifásico.. 7.2. MOTOR DE FASE PARTIDA En este motor se sitúan dos devanados que están desfasados 90° eléctricos, el devanado principal se compone por una gran reactancia y una baja resistencia y el devanado secundario se compone por una baja reactancia y una gran resistencia de tal forma que todo esto se conecta en serie con un interruptor centrifugo que va situado en el eje del motor. Las intensidades que circulan por los devanados 𝐼𝑝 𝑒 𝐼𝑎 no tienen un desfase de 90° haciendo que resulte un campo giratorio de naturaleza elíptica, esto se ve debido a que el ángulo formado entre 𝑉 𝑒 𝐼𝑝 es superior al que existe entre 𝑉 𝑒 𝐼𝑎 , este campo giratorio produce el despegue del motor, y cuando la velocidad del rotor alcanza un valor del orden del 70% del nominal, el interruptor centrifugo desconecta el devanado auxiliar, de esta forma el motor queda funcionando como monofásico..
(35) Fig. 30 diagrama fasorial de un motor fase partida y curva par-velocidad de un motor monofásico con condensador. (Fraile, J (2003), Máquinas eléctricas). 7.3. MOTOR DE ARRANQUE POR CONDENSADOR En este tipo de motor, el devanado auxiliar lleva en serie un condensador. El empleo de este condensador ayuda a conseguir un desfase en las corrientes de las bobinas casi en los 90°. A la circular corriente de valores eficaces iguales y desfasadas entre si 90° la maquina se comporta como un motor bifásico y genera un campo magnético giratorio que hace girar el motor. El motor con condensador ofrece un par de arranque considerablemente mayor que con el del montaje de fase partida, una vez se desconecta el condensador del motor queda funcionando como monofásico empleando el devanado principal.. Fig. 31 Motor monofásico de arranque por condensador. (Fraile, J (2003), Máquinas eléctricas).
(36) Fig. 32 Diagrama fasorial y curva par velocidad de un motor monofásico con condensador. (Fraile, J (2003), Máquinas eléctricas). También existen motores monofásicos de condensador en los que, tanto el condensador como el devanado auxiliar, permanecen conectados permanentemente. Para esto es necesario que el condensador y el devanado auxiliar soporte la corriente de trabajo por mucho tiempo, por lo cual, es necesario dimensionarlos para estas condiciones, en estos motores los devanados, tanto principal y auxiliar son iguales, para mejorar el arranque de estos motores se suele colocar un condensador adicional en paralelo con el condensador de funcionamiento normal, este condensador se desconecta en cuanto el motor alcanza cierta velocidad, por medio de un interruptor centrifugo.. 8. PRACTICA 5: CAMBIO DE GIRO DE UN MOTOR MONOFASICO DE INDUCCION 8.1. OBJETIVOS • Identificar el circuito interno de un motor monofásico de inducción. • Realizar cambio de giro de un motor monofásico de inducción. 8.2. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Identificar las bobinas del motor U1-U2, U5-U6 y los extremos del capacitor. Con el multímetro medir los valores de resistencia de cada uno de los bobinados y el valor de capacitancia del capacitor. Conectar el circuito ilustrado en la figura 33 e identificar el sentido de giro. El motor cuenta con una placa de conexiones, usar ésta como apoyo para realizar la prueba, no olvidar consultar el manual de la máquina. Medir la corriente de arranque del motor en cada uno de los.
(37) sentidos y compararlas, además medir la corriente de trabajo del motor y verificar que existan cambios.. Fig. 33 Sentidos de giro de un motor monofásico de inducción. GIRO A LA DERECHA Iarr. It. GIRO A LA IZQUIERDA Iarr. It. Tabla 10. Corriente de arranque y de trabajo de un motor de inducción monofásico 8.3. EQUIPOS REQUERIDOS • • • • •. Banco de alimentación variable AC Conectores Motor de inducción fase partida con arranque por capacitor Multímetro Fluke 179 Pinza amperométrica. PREGUNTAS • • •. ¿Cuál es la función del interruptor centrifugo en este tipo de motores? ¿Cuál es el mayor problema de un motor monofásico? ¿Cuántos grados eléctricos estas desfasados los arrollamientos de un motor fase partida?.
(38) MOTOR DE CORRIENTE CONTINUA 9. ASPECTOS CONSTRUCTIVOS La máquina de corriente continua está constituida por una parte fija o estator y una parte móvil o rotor. El estator está formado por una culata (1), que pertenece al circuito magnético inductor y que ejerce la función de soporte mecánico del conjunto, la culata está perfora en varios puntos de su periferia para fijar los polos, los cuales están constituidos por los núcleos polares (2), modernamente realizados en chapas de acero convenientemente apiladas sobre las que se coloca el devanado inductor o de excitación (8). La parte de los polos próxima AL rotor presente una expansión magnética denominada zapata polar (3). Para mejor la conmutación, esta maquinas suelen llevar unos polos intermedios (4) y (5), que reciben también el nombre de interpolos, polos auxiliares o polos de conmutación; el devanado se conecta en serie con el inducido. (Fraile, 2003, p.480) El rotor está formado por el inducido (6) y el colector de delgas o conmutador (10). El inducido se construye con discos de chapa de acero al silicio convenientemente ranurado para alojar en él el correspondiente devanado. En la figura 35 el arrollamiento del inducido (7) es del tipo en anillo, que hoy en día ya no se emplea; en la actualidad los arrollamientos son en tambor, disponiendo ambos lados activos de las espiras en las generatrices externas del apilamiento del rotor. Los devanados de las máquinas de c.c. sin cerrados, lo cual indica que el bobinado se cierra sobre sí mismo sin principio ni fin. Los devanados pueden ser imbricados u ondulados, dependiendo de si se cruzan o no las partes de la bobina observadas desde el lado del colector. (Fraile, 2003, p.480). Fig.34 Aspectos constructivos de una máquina de corriente continua. (Fraile, J (2003), Máquinas eléctricas).
(39) Fig. 35 Devanados imbricado y ondulado (Fraile, J (2003), Máquinas eléctricas) El colector de delgas es el órgano que caracteriza específicamente a estas máquinas y es el encargado de la conversión mecánica de la c.a. inducida en las bobinas en c.c. de salida. Está formado por láminas de cobre o delgas cuya sección transversal tiene la forma de cola de milano; las delgas están aisladas entre sí y el cubo del colector por medio de un dieléctrico de mica. (Fraile, 2003, p.481). Fig. 36 Sección de un colector de delgas (Fraile, J (2003), Máquinas eléctricas).
(40) La extracción o suministro de corriente al colector se realiza por medio de escobillas de grafito, las escobillas permanecen fijas, dispuestas en los porta escobillas y de esta manera, mientras gira el rotor, las escobillas conservan una posición invariable con respecto a los polos de la máquina. La presión típica de una escobilla sobre el colector debe ser del orden de 0,1 a 0,15 kpa/cm2, lo que se consigue por la acción de un muelle en espiral cuya presión se ajusta por medio de una palanca dispuesta para ello. (Fraile, 2003, p.482). Fig. 37 escobilla, porta escobilla y muelle de ajuste de la presión de contacto. (Fraile, J (2003), Máquinas eléctricas). 9.1. CONCEPTOS BASICOS En un motor de c.c. se crea un campo magnético uniforme mediante sus polos. Los conductores de la armadura se ven forzados a conducir corriente por medio de la conexión a una fuente de energía de c.c. el conmutador mantiene la misma dirección de la corriente en los conductores bajo cada polo. De acuerdo con la ecuación de fuerza de Lorentz, un conductor que porta corriente experimenta una fuerza que tiende a moverlo cuando se coloca en un campo magnético. Todos los conductores situados en la periferia de un motor c.c. están sujetos a esa fuerza, además la fuerza ocasiona que la armadura gire en el sentido de las manecillas el reloj, por lo tanto, la armadura de un motor de c.c. gira en dirección del par desarrollado por el motor. (Gurú, 2003, p. 353).
(41) Fig. 38 fuerza que experimentan los conductores de la armadura en un motor bipolar de corriente continua. (Gurú, B (2003), Máquinas eléctricas y Transformadores). La ecuación que describe el comportamiento del par desarrollado es: 𝑇𝑑 = 𝐾𝑎Φ𝑝𝐼𝑎. (Ec. 43). 𝑃𝑍. Donde 𝑘𝑎 = 2𝜋𝑎, Φp es el flujo por polo y Ia es la corriente de la armadura. (Gurú, 2003, p. 354) A medida que gira la armadura, en las bobinas se induce una fuerza electromotriz, que se opone a la corriente que entra en la armadura, esta fuerza es llamada fuerza contra electromotriz (f.c.e.m.) El voltaje inducido en los motores de c.c. se expresa como 𝐸𝑎 = 𝐾𝑎Φ𝑝𝓌𝑚. (Ec. 45). Donde wm es la velocidad angular de la armadura en rad/s. (Gurú, 2003, p. 354) Si Ra es la resistencia total en el circuito de la armadura y Vs el voltaje aplicado en los terminales de la armadura, la corriente de armadura se expresa como: 𝐼𝑎 =. 𝑉𝑠−𝐸𝑎 𝑅𝑎. (Ec. 46).
(42) 9.2. CIRCUITO EQUIVALENTE DEL MOTOR DE C.C.. Fig.39 Circuito equivalente de un motor de corriente continua. (Chapman, S. (2000), Máquinas eléctricas) La f.c.e.m en el momento del arranque vale cero ya que la armadura no está girando. Para un valor de Ra pequeño la corriente de la armadura será muy alta para el valor de Vs aplicado a los terminales de la armadura. La corriente en exceso puede causar daños en los devanados, por lo tanto, un motor de corriente continua nunca debe arrancarse aplicando el voltaje nominal pleno en bornes de su armadura o rotor; para esto es necesario agregar una resistencia externa en serie con el circuito de la armadura o utilizar algún circuito regulador de voltaje, que de forma gradual sea reducida a medida que aumenta la velocidad en el motor, para cuando se alcance la velocidad nominal la resistencia externa sea cero.. Fig. 40 Resistencia variable insertada en serie con la armadura durante el arranque. (Gurú, B (2003), Máquinas eléctricas y Transformadores).
(43) 9.3. CURVA DE MAGNETIZACION DE UN MOTOR DE CORRIENTE CONTINUA El voltaje interno generado Ea de un motor de c.c. este dado por 𝐸𝑎 = 𝐾𝑎 ∗ 𝜙𝑝 ∗ 𝑊𝑚. (Ec. 47). La corriente de campo en una máquina de c.c. produce una fuerza magnetomotriz que produce un flujo en el motor. 𝔉 = 𝑁𝑓 ∗ 𝐼𝑓. (Ec. 48). Como la corriente de campo produce una fuerza magnetomotriz, que a su vez produce flujo en la máquina y Ea es proporcional al flujo, se presenta la curva de magnetización de la máquina con el comportamiento de estas variables a una velocidad especifica.. Fig.41 Curva de magnetización de una maquina a una velocidad ꞷ0. (Chapman, S. (2000), Máquinas eléctricas). 9.4. PERDIDAS EN UN MOTOR DE CORRIENTE CONTINUA La potencia de entrada a un motor de c.c. es eléctrica y la potencia de salida es mecánica. Cuando se suministra potencia a un motor, una parte significativa se disipa en las resistencias de armadura y los devanados de campo, como perdidas en el cobre. El motor convierte la potencia restante (potencia desarrollada) en potencia mecánica. Una parte de la potencia desarrollada se consume por la pérdida de rotación. (Gurú, 2003, p. 356).
(44) Fig. 42 Diagrama de flujo de potencia de un motor de c.c. (Gurú, B (2003), Máquinas eléctricas y Transformadores) MOTOR DE CORRIENTE CONTINUA DL1024R EXCITACIÓN EXCITACIÓN SERIE COMPUESTA DEVANADO SERIE D3-D4 D1-D4 POTENCIA NOMINAL 1KW 0,7 KW TENSION NOMINAL 230V 230V CORREINTE NOMINAL 6A 4,9A VELOCIDAD NOMINAL 3600 rpm 3600rpm CORRIENTE DE EXITACION 0,37A 2,4A. 10. MOTOR DE CORRIENTE DERIVACION O SHUNT. CONTINUA. CONEXIÓN. EXCITACIÓN SHUNT 0,9KW 230V 5,4A 3600rpm 0,5A -170V. INDEPENDIENTE. Y. EN. La manera en que son conectados los devanados de campo de la máquina de CC y el circuito de rotor o la armadura dan origen a las distintas conexiones que se presentan en las máquinas de CC con sus correspondientes características de funcionamiento. De acuerdo con lo anterior se tiene que un motor con excitación separada o independiente es un motor cuyo circuito de campo es alimentado por una fuente de potencia separada de voltaje constante, mientras que un motor en derivación es aquel cuyo circuito de campo obtiene su potencia directamente de los terminales del inducido del motor. Si se supone que el voltaje de alimentación es constante, no hay diferencia de comportamiento entres estas dos máquinas, a menos que se especifique lo contrario, siempre se describe el comportamiento de un motor en derivación, también se incluye el motor de excitación separada. (Chapman, 2000, p. 551).
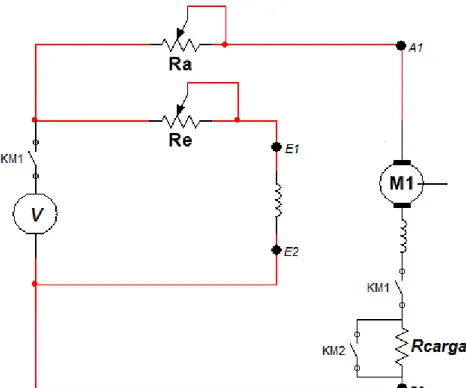
(45) Fig.43 Motores con excitación independiente y derivación. (Fraile, J (2003), Máquinas eléctricas) A un voltaje aplicado constante, se genera un flujo constante. El par desarrollado por el motor es: 𝑇𝑑 = 𝐾𝑎𝜙𝐼𝑎 = 𝐾𝐼𝑎. (Ec. 49). Donde K=KaΦp es una cantidad constante. Por lo tanto. El par que se desarrolla en un motor shunt es proporcional a la corriente de armadura. Cuando el motor shunt trabaja con cierta carga, la tensión inducida del motor es: 𝐸𝑎 = 𝑉𝑠 − 𝐼𝑎𝑅𝑎. (Ec. 50). Puesto que Ea=KaΦwm la velocidad del motor es 𝑊𝑚 =. 𝑉𝑠−𝐼𝑎𝑅𝑎 𝐾𝑎𝜙𝑝. (Ec. 51). 11. PRACTICA 6: POTENCIA, PAR Y EFICIENCIA DE UN MOTOR SHUNT O DERIVACION 11.1. OBJETIVOS • Identificar el comportamiento de un motor c.c. shunt o derivación. • Hallar las curvas características de un motor c.c. shunt o derivación. • Manejar adecuadamente los devanados de un motor de corriente continua 11.2.. PROCEDIMIENTO. A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Conectar el circuito que se ilustra en la figura 44. Acoplar el freno electromagnético al motor de c.c. éste se comportará como la carga del motor, encender el motor a tensión nominal 200 Vdc, variar gradualmente el reóstato de arranque iniciando desde el valor más alto (36,5 Ω), hasta un valor de 0 Ω. Recordar que éste es obligatorio para encender este tipo de máquina, ya que la corriente de arranque de este motor es muy alta y puede dañar el devanado de armadura. En vacío, es decir, con T=0, realizar las mediciones de velocidad n, corriente de armadura Ia,.
(46) corriente de campo If, y potencia de salida Pout, variar paulatinamente la carga, aumentando controladamente la tensión en el freno, y medir nuevamente las variables antes indicadas, hacer esto para diferentes valores de par T.. Fig.44 Conexión motor c.c. conexión derivada o shunt. Grafique con los datos obtenidos • T vs n • Ia vs n • Ia vs T • n vs Pout Calcule la eficiencia del motor. 𝓃= PAR (n*m). VELOCIDAD (rpm). 𝑃𝑜𝑢𝑡. CORREITE DE ARMADURA (A). 𝑃𝑒. (Ec. 52). CORRIENTE DE CAMPO (A). POTENCIA DE SALIDA (W). POTENCIA DE ENTRADA (W). 0. Tabla 11. Datos obtenidos en la prueba de potencia, par y eficiencia de un motor c.c. shunt o derivación..
(47) Las curvas características esperadas de este motor se observan en las figuras 45, 46, 47 y 48. PAR VS VELOCIDAD PAR[N*m]. 2,5 2 1,5 1 0,5 0 3250. 3300. 3350. 3400. 3450. 3500. 3550. 3600. 3650. VELOCIDAD [rpm]. CORRIENTE DE ARMADURA [A]. Fig. 45 Grafica de par vs velocidad motor c.c. shunt o derivación.. CORRIENTE DE ARMADURA VS VELOCIDAD 5 4 3 2 1 0 3250. 3300. 3350. 3400. 3450. 3500. 3550. 3600. 3650. VELOCIDAD [rpm]. Fig. 46 Grafica de corriente de armadura vs velocidad motor c.c. shunt o derivación.. PAR VS CORRIENTE DE ARMADURA PAR [N*m]. 2,5 2. 1,5 1 0,5 0 0. 1. 2. 3. CORRIENTE DE ARMADURA[A]. 4. 5.
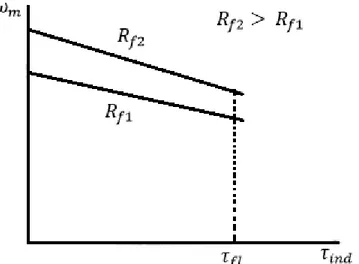
(48) Fig. 47 Grafica de par vs corriente de armadura motor c.c. shunt o derivación.. POTENCIA DESARROLLADA [W]. POTENCA DESARROLLADA VS VELOCIDAD 1000 800 600 400 200 0 3250 3300 3350 3400 3450 3500 3550 3600 3650. VELOCIDAD [rpm]. Fig. 48 Grafica de potencia desarrollada vs velocidad motor c.c. shunt o derivación.. 11.3. EQUIPOS REQUERIDOS • Banco de alimentación variable AC DL1013M3 • Banco de alimentación DC DL1013M3 • Conectores • Motor DC DL1024R • Multímetro Fluke 179 • Pinza amperométrica • Módulo de medición digital del par DL2006 C • Freno electromagnético DL1019M • Analizador de potencia AMC8220. 12. CONTROL DE VELOCIDAD EN MOTORES C.C. EN DERIVACION Existen varios métodos utilizados para controlar la velocidad de una máquina de c.c. en derivación que son: • • •. Ajustando la resistencia de campo Rf, y por lo tanto el flujo de campo. Ajustando el voltaje en los terminales, aplicado al inducido o la armadura. Insertando una resistencia en serie con el circuito del inducido.. 12.1. Cambio de la resistencia de campo: Si la resistencia de campo aumenta, la corriente de campo disminuye If, si esta disminuye también disminuye el flujo de campo Φf. Una disminución de flujo original provoca una disminución en el voltaje interno generado Ea, lo cual causa un gran aumento en la corriente de armadura de la.
(49) máquina Ia, esta aumento en la corriente de armadura Ia, produce aumento en el par inducido Tind y este a su vez aumenta la velocidad wm, este aumento en la velocidad wm aumenta nuevamente la tensión inducida Ea y disminuye la corriente de armadura Ia, al disminuir la corriente de armadura Ia se reduce el par inducido Tind hasta que Tind=Tcarga a una velocidad mayor Wm. Con este método en posible controlar la velocidad del motor por encima de la velocidad nominal, pero no por debajo de esta, ya que para que esto ocurra se necesitará mayor corriente por el inducido y de esta forma causar daño por éste.. Fig. 49 Par inducido vs velocidad, a valores diferentes de resistencia de campo. (Chapman, S. (2000), Máquinas eléctricas) 12.2. Cambio de voltaje en el inducido: Otra forma de controlar la velocidad implica el cambio del voltaje aplicado al inducido del motor sin cambiar el voltaje aplicado al campo. Para realizar este tipo de control, se requiere tener una conexión independiente, es decir el motor debe ser excitado por separado. Si el voltaje Va aumenta, se debe aumentar la corriente de armadura, como Ia aumenta el par inducido Tind aumenta de tal modo que Tind > Tcarga y en consecuencia la velocidad Wm aumenta. El aumento en la velocidad incrementa Ea y esto disminuye Ia, provocando la disminución del Tind hasta que este se iguala al Tcarga a una velocidad mayor..
(50) Fig.50 Velocidad vs par inducido, según el cambio de voltaje en el inducido. (Chapman, S. (2000), Máquinas eléctricas). 12.3. Insertando una resistencia en serie con el circuito del inducido: Al insertar una resistencia en el circuito del inducido, el motor operara con más lentitud cuando tiene carga, ya que el par desarrollado no tendrá cambios grandes a medida que la velocidad aumenta. Este método no es muy usado por su costo, ya que las pérdidas en esta resistencia son muy altas.. Fig. 51 Velocidad vs par inducido insertando resistencia en serie con el circuito del inducido. (Chapman, S. (2000), Máquinas eléctricas) Cuando el motor opera a sus valores nominales de corriente, tensión y potencia, el motor estará girando a velocidad nominal; el control de voltaje en el inducido puedo regular la velocidad del motor por debajo de la nominal, pero no por encima, ya que para velocidades mayores a la nominal se necesitará mayor tensión en el inducido y podrá causar daños..
(51) 13 PRACTICA 7: CONTROL DE VELOCIDAD MOTOR DE CORRIENTE CONTINUA CONEXIÓN SHUNT 13.1. OBJETIVO •. Controlar la velocidad de un motor c.c. con los métodos propuestos.. 13.2. Insertando una resistencia en serie con el circuito del inducido. 13.2.1. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar las pruebas. B. Conectar el circuito que se ilustra en la figura 52. Encender el motor a tensión nominal 200 Vdc, variar gradualmente el reóstato de arranque iniciando desde el valor más alto (36,5 Ω), hasta un valor de 0 Ω. Recordar que éste es obligatorio para encender este tipo de máquina, ya que la corriente de arranque de este motor es muy alta y puede dañar el devanado de armadura. Realizar en cada variación las mediciones de resistencia Ra, corriente de armadura Ia, corriente de campo If, velocidad de giro de la máquina y graficar Ra vs Ia e Ia vs n. Fig.52 conexión de un motor c.c. en conexión en derivación con resistencia en serie con el inducido..
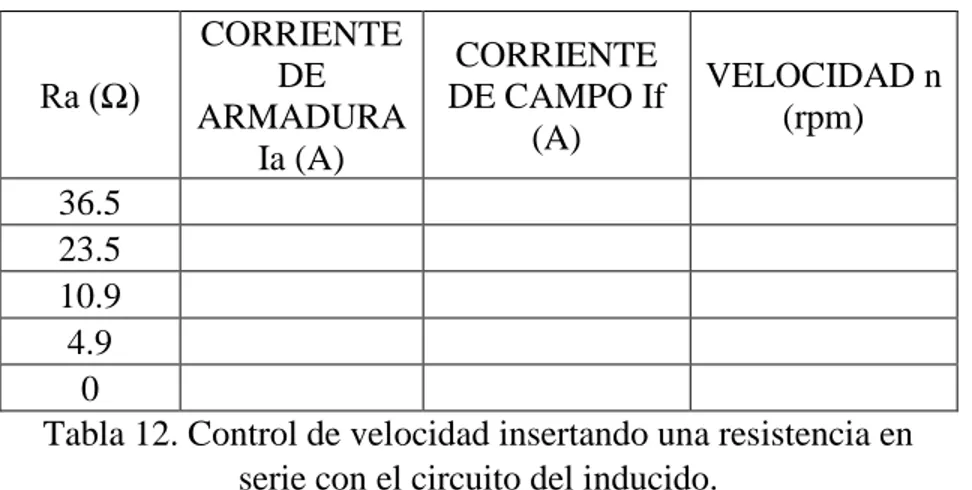
(52) Ra (Ω). CORRIENTE DE ARMADURA Ia (A). CORRIENTE DE CAMPO If (A). VELOCIDAD n (rpm). 36.5 23.5 10.9 4.9 0 Tabla 12. Control de velocidad insertando una resistencia en serie con el circuito del inducido. Los gráficos esperados del control de velocidad de un motor c.c. en derivación con una resistencia en serie con el inducido se evidencian en la figura 53. VELOCIDAD [rpm]. VELOCIDAD VS RESISTECIA EN EL INDUCIDO 3700 3600 3500 3400 3300 3200 0. 10. 20. 30. 40. RESISTENCIA DEL INDUCIDO [Ω]. Fig.53 Comportamiento de la velocidad respecto a la variación de la resistencia insertada en el inducido de un motor c.c. en conexión en derivación con resistencia en serie con el inducido. 13.2.2. • • • • • • • • •. EQUIPOS REQUERIDOS Banco de alimentación variable AC/DC DL1013M3 Módulo de cargas y reóstatos DL 1017 Conectores Motor DC DL1024R Multímetro Fluke 179 Pinza amperométrica Módulo de medición digital del par DL2006 C Freno electromagnético DL1019M Analizador de potencia AMC8220.
(53) 13.3. Ajustando la resistencia de campo Rf 13.3.1. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Realizar el montaje de la figura 54 teniendo en cuenta en ajustar el valor de voltaje de alimentación a 200 Vdc y teniendo siempre la precaución de ubicar la resistencia de arranque en su valor máximo, y ajustar a su valor mínimo el reóstato de campo para así contar con el mayor valor posible de corriente de campo If. Encender el motor a tensión nominal, de manera cuidadosa y continua ir variando el reóstato de arranque hasta que su valor de resistencia sea cero ohmios y tomar el valor de velocidad de rotación en el eje de la máquina. Una vez hecha esta operación, variar gradualmente de menor a mayor valor el reóstato de campo y realizar en cada variación las mediciones de resistencia Re, corriente de armadura Ia, corriente de campo If, y velocidad. En cada punto de medición graficar Re vs If y If vs n.. Fig. 54 Conexión de un motor de c.c. en derivación. Re(Ω). CORRIENTE DE ARMADURA Ia (A). CORRIENTE DE CAMPO If (A). VELOCIDAD n (rpm). Tabla 13. Control de velocidad ajustando la resistencia de campo.
(54) Los gráficos del control de velocidad de un motor c.c. en derivación ajustando la resistencia de campo se evidencian en la figura 55.. VELOCIDAD [rpm]. VELOCIDAD VS RESISTENCIA DE CAMPO 3750 3700 3650 3600 3550. 18. 18,5. 19. 19,5. 20. RESISTENCIA DE CAMPO [Ω]. Fig.55 Comportamiento de la corriente de armadura de un motor c.c. en conexión en derivación con variación en la resistencia de campo. 13.3.2. • • • • • • • • •. 14.. EQUIPOS REQUERIDOS Banco de alimentación variable AC/DC DL1013M3 Módulo de cargas y reóstatos DL 1017 Conectores Motor DC DL1024R Multímetro Fluke 179 Pinza amperométrica Módulo de medición digital del par DL2006 C Freno electromagnético DL1019M Analizador de potencia AMC8220. PRACTICA 8: FRENADO DINAMICO DE UN MOTOR C.C. EN CONEXIÓN SHUNT O DERIVACION. 14.1. OBJETIVOS • Disminuir el tiempo de frenado de un motor de corriente continua en conexión Hunt o derivación. 14.2. PROCEDIMIENTO A. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las máquinas y equipo de medición a usar, antes de realizar la prueba. B. Realizar el montaje de la figura 56, de ser necesario pedir ayuda al personal de los laboratorios. Comprobar el buen estado de los equipos a utilizar y revisar los manuales de las.
(55) máquinas y equipo de medición a usar, antes de realizar la prueba. Ajustar el valor de voltaje de alimentación a 200 Vdc y teniendo siempre la precaución de ubicar la resistencia de arranque en su valor máximo, y ajustar a su valor mínimo el reóstato de campo para así contar con el mayor valor posible de corriente de campo If. Encender el motor a tensión nominal oprimiendo el pulsador S2, variar el reóstato de arranque hasta que su valor de resistencia sea cero ohmios y tomar el valor de velocidad de rotación en el eje de la máquina. Una vez hecha esta operación, ajustar el reóstato de campo de tal forma que se cuente con una velocidad de giro aproximada de 3600 rpm, luego de verificar la velocidad oprimir el botón rojo del banco de alimentación, tomar el tiempo de frenado del motor, no olvidar devolver el reóstato de arranque del motor al valor de máxima resistencia. Encender nuevamente el banco y encender el motor oprimiendo el pulsador S2, verificar la velocidad del motor y oprimir el pulsador S1 para apagar el motor e insertar la resistencia en serie con la armadura, medir nuevamente el tiempo de frenado del motor, el cual será menor al tiempo de frenado inicial. Si se desea se puede cambiar la resistencia para comprobar el efecto de ésta en el tiempo de frenado del motor.. Fig. 56a Esquema de control para frenado dinámico de un motor de c.c. en derivación..
(56) Fig. 56b Esquema de potencia para frenado dinámico de un motor de c.c. en derivación.. TIEMPO DE FRENADO SIN RESISTENCIA. TIEMPO DE FRENADO CON RESISTENCIA. Tabla 14. Tiempo de frenado de un motor c.c. en conexión shunt o derivación. 14.3. EQUIPOS REQUERIDOS • • • • • • • • • • •. Banco de alimentación variable AC/DC DL1013M3 Tabla de automatización Conectores Motor DC DL1024R Multímetro Fluke 179 Pinza amperométrica Paro de emergencia Cables para control Resistencia de potencia (bombillo) Contactor de alta potencia Cronometro.
(57) 15.. MOTOR DE CORRIENTE CONTINUA CONEXIÓN SERIE. Es un motor cuyo devanado de campo costa de pocas vueltas conectadas en serie con el circuito del inducido o armadura. En un motor serie (fig. 57), la corriente del inducido, la corriente de campo y la corriente es la misma.. Fig.57 Circuito equivalente de un motor serie. (Gurú, B (2003), Máquinas eléctricas y Transformadores) En un motor en serie cuando se incrementa la carga, también aumenta la corriente de armadura y por lo tanto el flujo, lo que causa que la velocidad baje, esto afecta la característica par-velocidad de un motor en serie. El par inducido en este motor se expresa como: 𝑇𝑖𝑛𝑑 = 𝐾𝜑𝐼𝑎. (Ec. 53). Como en esta máquina el flujo es directamente proporcional a la corriente de armadura entonces el flujo se puede estar dado por: 𝜙 = 𝑐𝐼𝑎 (Ec. 54) Donde c es una constante de proporcionalidad, entonces el par inducido en un motor serie está dado por: 𝑇𝑖𝑛𝑑 = 𝐾𝜙𝐼𝑎 = 𝐾𝑐𝐼𝑎2 (Ec. 55) Es decir, el par es proporcional al cuadrado de la corriente de armadura, por lo que a medida que la corriente aumenta, el par aumenta drásticamente..
(58) Fig.58 Curvas características de un motor c.c. en serie, en función de la corriente de armadura. (Gurú, B (2003), Máquinas eléctricas y Transformadores) Un motor en serie sin carga puede alcanzar una velocidad muy alta, ya que la corriente necesaria para superar la perdida de rotación es muy pequeña, por lo que la tensión inducida es aproximadamente igual al voltaje aplicado, por lo que se alcanza una velocidad que puede dañar el motor. Conforme se aumenta la carga al motor, el par que desarrolla debe crecer. El incremento en el par hace que la corriente de armadura aumente, el aumento de Ia produce un incremento en la caída de voltaje en las resistencias del circuito de armadura, del devanado de campo y la de arranque. Para un voltaje fijo aplicado, la tensión inducida Ea debe disminuir con la carga, como Ea es directamente proporcional a Ia debe controlarse la velocidad del motor. En la figura 59 se muestra el par desarrollado y la potencia desarrollada como función de la velocidad. (Gurú, 2003, p.358). Fig. 59 Par y potencia desarrollados en función de la velocidad de un motor c.c. en serie. (Gurú, B (2003), Máquinas eléctricas y Transformadores).
(59) 16.. MOTOR DE CORRIENTE CONTINUA CONEXIÓN COMPUESTA. Un motor shunt puede tener un devanado de campo en serie adicional, el devanado de campo en serie puede conectarse de modo que el flujo que produce apoye el flujo establecido por el devanado de campo shunt, caso en que se trata de un motor compuesto acumulativo. Un motor es compuesto diferencial si el flujo del devanado de campo en serie se opone al flujo del devanado de campo shunt. (Gurú, 2003, p.368) Un motor compuesto puede conectarse como motor shunt en derivación corta o como motor shunt en derivación larga. En un motor shunt en derivación larga, el devanado de campo shunt se conecta directamente al suministro. Por otro lado, el devanado de campo shunt de un motor compuesto en derivación corta se conecta en paralelo con las terminales de la armadura. El flujo creado por el devanado de campo shunt de un motor shunt en derivación corta disminuye ligeramente con el incremento en la carga debido a la caída de voltaje a través del devanado de campo en serie. (Gurú, 2003, p.368). Fig. 60 Conexión larga y corta de un motor c.c. compuesto. (Gurú, B (2003), Máquinas eléctricas y Transformadores). Las características de un motor compuesto son la mezcla de las características de un motor shunt y motor en serie. A medida que la carga aumenta en un motor compuesto el flujo total aumenta o disminuye debido al incremento de la corriente en el devanado serie para un motor compuesto acumulativo o diferencial, respectivamente, es decir 𝜙𝑝 = 𝜙𝑠ℎ ± 𝐾𝑓 ∗ 𝐼𝑎 (Ec. 56) Donde 𝜙𝑝 es el flujo total en la máquina, 𝜙𝑠ℎ es el flujo debido al campo shunt y 𝐾𝑓 ∗ 𝐼𝑎 es el flujo producido por el campo serie, tenga en cuenta que el signo menos es para el motor compuesto diferencial. (Guru, 2003, p.369).
Figure
+7
Documento similar
El conjunto Ward Leonard utiliza un motor trifásico de inducción como eje primario de un generador de corriente continua, el cual por acción de su circuito de excitación
De acuerdo a las características del torque en relación a la velocidad y corriente en el arranque, los motores asíncronos de inducción trifásicos (rotor bobinado) son clasificados en
En la figura 7.3 se muestra la posición angular, la velocidad angular, las corrientes tanto del estator como del rotor y el par eléctrico, la velocidad angular producida por una
a) Determine la resistencia total del circuito. b) Calcule la corriente eléctrica que circula por el circuito. c) Diga qué corriente eléctrica circula por cada resistencia.. En
Para el circuito que se muestra en la figura siguiente y empleando la información obtenida en el ejercicio 1, determine: a La resistencia de entrada vista por la
Para determinar la resistencia de puesta a tierra de una instalación cualquiera que sea, se debe medir la resistividad del terreno, y luego comprobarla periódicamente en la época
Los motores eléctricos tanto de CA como CD son máquinas eléctricas que transforman en energía mecánica la energía eléctrica, ambos deben soportar corrientes
1) Variación de la resistencia del circuito de rotor. 2) Regulación de la potencia de deslizamiento. Esta técnica también hace posible mantener baja la corriente durante el
