INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA
Y ELÉCTRICA
ALTAVOCES DE BOBINA MÓVIL Y PRÁCTICAS DE
METROLOGÍA ACÚSTICA
TESIS
QUE PARA OBTENER EL TÍTULO DE INGENIERO EN
COMUNICACIONES Y ELECTRÓNICA
PRESENTA
FERNANDO ALBERTO GUZMÁN CRUZ
ASESORES: ING. JOSÉ DE JESÚS NEGRETE REDONDO
ING. MARÍA TERESA FRANCO MARTÍNEZ
Agradecimientos
Agradezco a mis padres Julieta Cruz y Fernando Guzm´an, y a mi hermana Paloma
Guzm´an por apoyarme en todo, en lo bueno, lo malo, lo racional e irracional. Gracias
por nunca doblarse y no agachar la cabeza ante nadie, porque as´ı lo aprend´ı, son mi
todo, no estar´ıa aqu´ı sin ustedes, los amo.
A mis abuelos Fernando Guzm´an y Hermenegildo Cruz, porque me ense˜naron
tanto: a ser feliz sobretodo, quiero seguir aprendiendo pero alg´un d´ıa los volver´e a ver
y me seguir´an ense˜nando, los extra˜no.
A Herlinda Mej´ıa (Mam´a Linda) por nunca tratarme como un nieto si no como
un hijo, por todo el cari˜no, las motivaciones y las risas, no s´e que habr´ıa sido de m´ı
sin todos tus consejos, te adoro.
A mi abuela Susana Salazar porque a pesar de todo siempre ha estado ah´ı cuando
la he necesitado, por los recuerdos de mi abuelo y sus largas pl´aticas, te quiero.
A mis t´ıas Mar´ıa Eugenia, Elsa, Elba, Elizabeth y Diana; a mis t´ıos Horacio,
Salvador, Willy e Iban porque para ellos nunca he sido su sobrino y desde que me
conocieron siempre he sido un hijo m´as, gracias a ellos por darme a mis primos con
quienes no he convivido de otra forma que no sea una hermandad, gracias
M´oni-ca, Ana, Susana, Daniela, Andrea, Montse, V´ıctor, Diego, Miguel y Xitlali. A todos
ustedes gracias por siempre creer en m´ı, los adoro.
A mis amigos que tambi´en definen a m´ı familia: Alejandro Garza, P´oporo Ram´ırez,
Mois´es Morales, Oscar V´azquez, Christian Pati˜no, Mariana Viveros, Fernanda Mu˜n´oz,
Luis Herrera, C´esar Abarca, Adri´an Triujeque, Edith Serrano, Benjam´ın Cabrera,
Da-vid Tamariz, Daniel G´omez, Zanith Hern´andez, Hiram Morl´an, Iz´uatl Garc´ıa, Josu´e
Hern´andez, Nayely Mu˜n´oz, Lourdes Vidal, Gabriela Romero, Karen Alvarado,
Marie-jo Delgadillo, Fernanda Gonz´alez, Josu´e Galicia, Carlos Ameneyro, Erik Caballero,
Adriana V´azquez, a los Run Golden Boys: Federico Arias, V´ıctor Terrazas y Marco
Sin Elide Sandoval no habr´ıa tenido la mejor aventura fuera de estas fronteras.
Gracias Eli, te quiero.
A mis hermanos de diferente nacionalidad Vinicius Ormenesse (a toda tu familia,
mi familia brasile˜na: Ivan, Mirian y Arnaldo), Thaysa Rodrigues, Lucas Faria (abrazo
grande a tu familia), Douglas Mar¸cal, Vinicius Meirelles (a tu familia tambi´en muchas
gracias), Ronald Cerna, Cindy Silva, Ang´elica Vidal, Jefferson Iguasnia, Alexander
Noguera. El destino quiso que los conociera y no concibo una vida sin ustedes en ella,
los quiero. Siempre los querr´e.
A mis profesores y asesores de Ac´ustica Jos´e Negrete, Teresa Franco, Amparo
V´azquez y Maximino Pe˜na. Por su paciencia y sabidur´ıa.
Al Instituto Polit´ecnico Nacional, sin el cual no habr´ıa conocido a muchas personas
esenciales para m´ı. Gracias.
Por ´ultimo pero no menos importante a Ana Soares por la historia no escrita,
por ayudarme a prometer que volver´ıa, por tus risas, tus ojos, por toda t´u, eres
inspiraci´on. Gracias. Siempre.
Las promesas son para cumplirse.
Introducci´
on
Tanto en el proceso de aprendizaje acad´emico o capacitaci´on profesional como
en el desarrollo laboral, poner en pr´actica los conocimientos adquiridos a trav´es del
tiempo es vital; sin importar la carrera profesional cursada en la cual una persona se
encuentre inmersa. El mundo empresarial demanda de capital humano especializado
en determinadas tareas en forma constante y continua.
Por lo cual desempe˜narse con conocimientos reales en el ´ambito laboral no es una
cuesti´on solo curricular, demostrar conocer el uso correcto de equipos o herramientas
muestra la capacidad operativa en muchas de las diversas licenciaturas que los j´ovenes
cursamos en escuelas p´ublicas o privadas.
No siendo obviamente una excepci´on la ingenier´ıa en comunicaciones y electr´onica
con especialidad en ac´ustica, dentro de la cual los altavoces son una parte esencial
en la comprensi´on de los campos el´ectricos, mec´anicos y ac´usticos, cuyos elementos
combinan los diferentes par´ametros existentes en cada uno de dichos campos; pues de
manera simult´anea se reflejan en las caracter´ısticas propias de un altavoz.
Sin embargo, la problem´atica que se presenta dentro de la especializaci´on de ac´
usti-ca, es que a la fecha no existe ning´un manual de procedimientos para la realizaci´on
de pr´acticas de metrolog´ıa ac´ustica; por lo que dichas pr´acticas no se realizan bajo
ninguna regulaci´on formal u oficial. Teniendo como consecuencia el que cada docente
del ´area gu´ıa a sus alumnos basados en sus propios m´etodos desarrollados a trav´es de
la experiencia adquirida y acorde a los elementos operativos de los que disponen en
cada plantel.
Objetivo General
Realizar un manual de pr´acticas para la materia de Metrolog´ıa Ac´ustica dirigido
a los estudiantes de la academia de ac´ustica, con el cual puedan tener una mayor
Justificaci´
on
En la Escuela Superior de Ingenier´ıa Mec´anica y El´ectrica del Instituto Polit´ecnico
Nacional Unidad Zacatenco se imparte la especialidad de ac´ustica. En dicha ´area
una de las materias que comprende el plan de estudios es la de Metrolog´ıa Ac´ustica
que tiene como prop´osito contribuir a formar en el alumno la capacidad de realizar
mediciones e interpretarlas.
Actualmente no se tiene un manual de pr´acticas que considere una normativa
oficial para su realizaci´on, por lo que este material ayudar´a al profesor a ejemplificar y
demostrar de manera did´actica los par´ametros de los altavoces de bobina m´ovil vistos
en las clases te´oricas; teniendo como beneficio real el que los alumnos comprendan,
refuercen y eleven el aprendizaje, as´ı como la retenci´on de los conocimientos de un
modo te´orico-pr´actico. Obteniendo mayor nivel de aprendizaje.
La presente tesis propone la ayuda en la comprensi´on de dichas caracter´ısticas a
trav´es de este material did´actico en el tema de altavoces de bobina m´ovil. Intentando
que cada una de las pr´acticas explique de manera clara y concisa las caracter´ısticas
f´ısicas y el´ectricas propias de los altavoces.
Los resultados obtenidos s´olo reflejan que hay que poner atenci´on y tomar en
cuenta cada una de las caracter´ısticas propias de los altavoces para as´ı poder obtener
un mejor rendimiento a la hora de las diferentes aplicaciones que puedan tener los
´Indice general
1. Fundamentos de Vibraci´on 8
1.1. Introducci´on . . . 8
1.2. Oscilador Simple . . . 8
1.3. Condiciones iniciales . . . 10
1.4. Caracter´ısticas f´ısicas del movimiento arm´onico simple . . . 11
1.5. Energ´ıa de Vibraci´on . . . 12
1.6. Efecto de incluir la masa del resorte . . . 13
1.7. Oscilaciones amortiguadas . . . 14
1.8. Oscilaciones Forzadas . . . 16
1.9. Relaciones de Potencia . . . 18
1.10. Frecuencia de Resonancia Mec´anica . . . 19
1.11. Relaciones de Fase e Impedancia . . . 20
2. Altavoces de Bobina M´ovil 21 2.1. Introducci´on . . . 21
2.2. Constituci´on . . . 21
2.3. Partes del Altavoz de Bobina M´ovil . . . 22
2.4. Principio de Operaci´on . . . 23
3. Caracter´ısticas del Altavoz de Bobina m´ovil 25 3.1. Introducci´on . . . 25
3.3. Respuesta en Frecuencia . . . 27
3.4. Frecuencia de Resonancia . . . 28
3.5. Directividad . . . 29
3.6. Distorsi´on . . . 30
3.7. Potencia m´axima . . . 32
4. An´alisis de altavoces 33 4.1. Introducci´on . . . 33
4.2. Altavoz de Radiaci´on Directa Ideal . . . 33
4.3. Ejemplo de Altavoz de Radiaci´on Directa . . . 38
4.4. Altavoz . . . 41
4.5. Efecto de los par´ametros de la bobina . . . 45
5. Medici´on de los Par´ametros de Altavoces 47 5.1. Introducci´on . . . 47
5.2. Pr´acticas a realizar . . . 47
5.2.1. Pr´actica 1: Constante de Rigidez (k) y Frecuencia de Resonan-cia (fs) . . . 48
5.2.2. Pr´actica2: Respuesta en frecuencia de altavoces . . . 57
5.2.3. Pr´actica 3: Compliancia Mec´anica y Compliancia Ac´ustica . . 62
5.2.4. Pr´actica 4: Masa del Diafragma y de la Bobina del Altavoz . . 70
5.2.5. Pr´actica 5: Densidad de Flujo Magn´etico . . . 74
5.2.6. Pr´actica 6: Patr´on de Radiaci´on . . . 78
5.2.7. Pr´actica 7: Impedancia del Altavoz . . . 88
A. Anteproyecto de Norma Oficial Mexicana para Altavoces de Bobina M´ovil de Radiaci´on Directa 95 A.1. Objetivo y Campo de la Aplicaci´on . . . 95
A.3. Definiciones . . . 96
A.4. Distancia de medici´on . . . 98
A.5. Caracter´ısticas del equipo empleado . . . 98
A.5.1. Oscilador de audio . . . 98
A.5.2. Amplificador de audio . . . 98
A.6. Frecuencia de resonancia nominal . . . 99
A.6.1. Equipo Empleado . . . 99
A.6.2. Procedimiento y evaluaci´on . . . 99
A.7. Impedancia nominal . . . 100
A.7.1. Equipo Empleado . . . 100
A.7.2. Procedimiento y evaluaci´on . . . 100
A.8. Respuesta a la frecuencia . . . 100
A.8.1. Equipo Empleado . . . 100
A.8.2. Procedimiento y evaluaci´on . . . 101
A.9. L´obulo direccional . . . 101
A.9.1. Equipo Empleado . . . 101
´Indice de figuras
1.1. Oscilador simple . . . 9
1.2. Desfases entre el desplazamiento, velocidad y aceleraci´on . . . 11
1.3. Efecto de la masa del resorte . . . 13
2.1. Partes del Altavoz de Bobina M´ovil . . . 22
2.2. Esquema de Bloques de transducci´on . . . 24
3.1. Impedancia de altavoces con diferente di´ametro . . . 27
3.2. Respuesta en Frecuencia . . . 28
3.3. Forma de Medici´on del Patr´on de Radiaci´on . . . 29
3.4. Patr´on de Radiaci´on . . . 30
3.5. Distorsi´on arm´onica de se˜nal . . . 31
4.1. Impedancia mec´anica de un altavoz de pist´on . . . 39
4.2. Eficiencia de un altavoz de pist´on en funci´on de la frecuencia . . . 40
4.3. Impedancia de movimiento de un altavoz de pist´on en funci´on de la frecuencia. . . 41
4.4. Impedancia de entrada el´ectrica de un altavoz de pist´on en funci´on de la frecuencia. . . 42
4.5. Cono de Altavoz Simple y Sistema de Suspensi´on. . . 43
4.6. Cono de Altavoz Corrugado. . . 45
5.1. Ejemplo de Oscilador simple . . . 48
5.3. Medici´on de la profundidad del cono con masa . . . 50
5.4. Diagrama de conexi´on para la obtenci´on de la Respuesta en Frecuencia. 52 5.5. Ejemplo de respuesta en Frecuencia . . . 57
5.6. Ejemplo de montaje del son´ometro y el altavoz. . . 58
5.7. Diagrama de conexi´on para la obtenci´on de la Respuesta en Frecuencia. 58 5.8. Medici´on de la profundidad del altavoz a) sin masa y b) con masa . . 64
5.9. Diagrama de conexi´on para la obtenci´on de la Compliancia Mec´anica 65 5.10. Diagrama de conexi´on para la obtenci´on de la Compliancia Ac´ustica . 67 5.11. Diagrama de conexi´on para obtener la frecuencia de resonancia . . . . 72
5.12. Medici´on de la profundidad el altavoz sin pesa . . . 75
5.13. Medici´on de la profundidad el altavoz con pesa . . . 75
5.14. Diagrama de conexi´on para obtener la densidad de flujo. . . 76
5.15. Ejemplo Patr´on de Radiaci´on . . . 78
5.16. Diagrama para la obtenci´on del patr´on de radiaci´on . . . 79
5.17. Vista superior de ejemplo de obtenci´on del patr´on de radiaci´on . . . . 79
Cap´ıtulo 1
Fundamentos de Vibraci´
on
1.1.
Introducci´
on
En un sentido amplio, ac´ustica puede ser definido c´omo la generaci´on, transmisi´on,
y recepci´on de energ´ıa en forma de ondas vibratorias en la materia. Los ´atomos o
mol´eculas de un fluido o s´olido al ser desplazados de su configuraci´on normal, se
eleva una fuerza de rigidez de restauraci´on el´astica. Es la acci´on de esta fuerza de
restauraci´on el´astica, acoplada con la inercia del sistema , la que permite a la materia
a participar en oscilaciones de vibraci´on y por lo tanto generar y transmitir ondas
ac´usticas.
1.2.
Oscilador Simple
Si una masa m, sujeta a alg´un tipo de resorte y obligado a moverse hacia atr´as
y hacia delante en una sola direcci´on, es desplazada desde su posici´on central o de
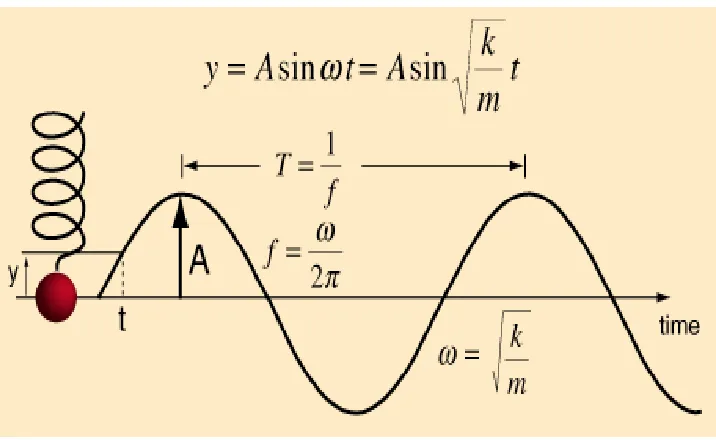
reposo y es posteriormente liberada, se observar´a a la masa vibrar.
La frecuencia de vibraciones constante y el desplazamiento de la masa desde su
posici´on de reposo es una funci´on senoidal. Este tipo de vibraciones son llamadas
vi-braciones arm´onicas simples. La masa vibrar´a en movimiento arm´onico simple
siem-pre que la fuerza de restauraci´on resultante de la rigidez del resorte sea directamente
proporcional al desplazamiento de la masa desde su posici´on de reposo.
Figura 1.1: Oscilador simple
f=-sx
donde x es el desplazamiento de la masa m desde su posici´on de reposo, s es la
constante de rigidez del resorte, y el signo de menos indica que la fuerza es dirigida
en sentido opuesto al desplazamiento. Substituyendo esta expresi´on por la fuerza en
la ecuaci´on general de movimiento lineal.
f =md2x
dt2
obtenemos
d2x
dt2 +msx= 0
Una soluci´on para dicha ecuaci´on es asumir que x = A1cosγt, al diferenciar y
sustituir esta expresi´on en la anterior ecuaci´on se obtiene que en efecto es la soluci´on
para dicha ecuaci´on si identificamos a γ como ps/m. Por lo que se tiene que x =
A2sin
p
s/mttambi´en es una soluci´on.
La soluci´on general completa es la suma de ambas soluciones.
x=A1cos
p
s/mt+A2sin
p
donde A1 y A2 son constantes arbitrarias. Esta ecuaci´on puede reescribirse de la
forma:
x=A1cosω0t+A2sinω0t
al reemplazar ps/m por ω0 una constante conocida como frecuencia angular.
La frecuencia de vibraci´on f0 del oscilador simple esta relacionada con el valor de
la frecuencia angular. Por lo tanto la frecuencia de vibraci´on se obtiene de:
f0 = ω2πo = 21πpms
Un decremento en el valor de la constante de rigidez o un incremento en la masa
del oscilador resulta en un decremento de la frecuencia.
1.3.
Condiciones iniciales
Las constantesA1yA2son determinadas por la manera en la cual la masa comienza
a moverse, es decir, por sus condiciones iniciales. Si al tiempo t = 0 la masa tiene
un desplazamiento inicial x0 y una velocidad inicial v0, entonces las constantes A1
y A2 estar´an sujetas a estas condiciones iniciales, y el movimiento subsecuente de
la masa es completamente determinado. Una sustituci´on directa de la ecuaci´on x =
A1cosω0t+A2sinω0t dex=x0 ent= 0 nos muestra que A1 iguala al desplazamiento
inicialx0. Al diferenciar la ecuaci´on y substituir las condiciones iniciales tenemos:
v0 =−ω0A1sin0 +ω0A2cos0
Por lo que v0 ser´a igual a ω0A2. Por lo tanto A2 = v0/ω0 y la ecuaci´on se puede
reescribir c´omo: x = x0cosω0t + ωv00sinω0t. Otra forma de la ecuaci´on se puede al
escribir A1 = AcosΦ y A2 = −AsinΦ, donde A y Φ son dos nuevas constantes
arbitrarias. Al substituir y simplificar tenemos:
donde A es la amplitud del movimiento y Φ es el ´angulo de fase inicial del
movi-miento. Al mismo tiempo se puede observar queAy Φ tienen sus valores determinados
por las condiciones iniciales y son:
A=x02+ v0
2
ω02
12
Φ = tan−1−vo
ω0x0
1.4.
Caracter´ısticas f´ısicas del movimiento arm´
oni-co simple
Al diferenciar la ecuaci´on x=Acos(ω0t+ Φ) tenemos que la velocidad est´a dada
por:
v = dx
dt =−ω0Asin(ω0t+ Φ)
y la aceleraci´on:
a= ddt2x2 =−ω02Acos(ω0t+ Φ) =−ω02x
a partir de estas ecuaciones se puede observar que el desplazamiento est´a retrasado
90◦ con respecto a la velocidad y la aceleraci´on est´a fuera de fase con respecto al
desplazamiento por 180◦, c´omo se puede observar en la figura 3.2.
1.5.
Energ´ıa de Vibraci´
on
La energ´ıa de una masa oscilando con un movimiento arm´onico simple de amplitud
A y frecuencia angular ω0 es la suma de la energ´ıa potencial Ep y la energ´ıa cin´etica
Ek del sistema. La energ´ıa potencial es el trabajo hecho en la distorsi´on del resorte
cuando la masa se mueve desde su posici´on de equilibrio est´atico. Como la fuerza
ejercida por la masa sobre el resorte es en direcci´on del desplazamiento e igual a +sx,
la energ´ıa potencial almacenada en el resorte es:
Ep =
Rx
0 sxdx = 1 2sx
2 = 1 2mω0
2x2
por lo tanto:
Ep = 12mω02A2cos2(ω0t+ Φ)
Usando la expresi´on usual para la energ´ıa cin´etica, tenemos:
Ek= 12mv2 = 12mω02A2sin2(ω0t+ Φ)
La energ´ıa total E del sistema para cualquier tiempo es por lo tanto:
E =EP +Ek = 12mω02A2[cos2(ω0t+ Φ) +sin2(ω0t+ Φ)]
E = 1 2mω0
2A2 = 1 2sA
2
Por lo que la energ´aa total es constante. Este resultado se obtiene de asumir que
el sistema es no disipativo. La magnitud total de la energ´ıa es igual a la energ´ıa
potencial cuando tiene su mayor desplazamiento, y al mismo tiempo es igual a la
1.6.
Efecto de incluir la masa del resorte
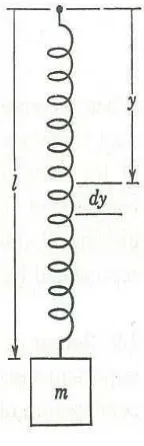
Si la masams del resorte no es despreciable en comparaci´on con la masa msujeta
al resorte, se esperar´ıa que esta inercia adicional del sistema resulte en una frecuencia
de vibraci´on reducida. Si el resorte tiene una longitudl y asumimos que la velocidad
de cualquier elementodydel resorte es proporcional a su distanciay, desde el extremo
fijo del resorte. Entonces la velocidad de este elemento estar´a dado porvy/l, donde v
es la velocidad del extremo libre del resorte al cual la masa est´a fija. La energ´ıa total
cin´etica del resorte puede obtenerse al integrar la energ´ıa cin´etica de una longituddy,
[image:18.595.276.348.280.503.2]a lo largo del resorte entero.
Figura 1.3: Efecto de la masa del resorte
Por lo tanto:
Ekdelresorte= 12
Rl
0 ms
l dy
y
lv
2
= 16msv2
y por lo tanto la energ´ıa cin´etica total del sistema est´a dada por:
Ekdelsistema= 12 m+ m3s
Asumiendo que la rigidez s es medida con el resorte en una posici´on vertical, la
energ´ıa potencial es la misma para un resorte sin masa. Dado que el sistema es no
disipativo la energ´ıa total debe ser constante . Por lo tanto:
E = 12 m+ ms
3
v2+ 1 2sx
2
Estableciendo a v =dx/dt y diferenciando con respecto al tiempo, tenemos:
m+ ms
3
d2x
dt2 + =0
de donde obtenemos que la frecuencia angular estar´ıa dada por:
ω02 = m+(mss/3)
Cuando la masa del resorte no es despreciable, la frecuencia de vibraci´on puede
ser determinada al a˜nadir a la masa suspendida un tercio de la masa del resorte.
1.7.
Oscilaciones amortiguadas
Cuando un cuerpo se somete a oscilaci´on, se elevan fuerzas disipativas (de fricci´on).
Estas fuerzas de fricci´on tienen como resultado en una amortiguaci´on de la oscilaci´on.
La fuerza de fricci´on de mayor importancia en la mayor´ıa de los problemas de
vibraci´on es la resistencia al movimiento que el fluido alrededor del cuerpo manifiesta.
Esta resistencia surge de la radiaci´on de las ondas de sonido, y depende de la velocidad
del cuerpo. Puede ser expresada como:
fr=−Rmdxdt
en donde Rm es una constante positiva llama resistencia mec´anica del sistema. Si
el efecto de la resistencia es incluido, la ecuaci´on de movimiento del oscilador simple
constre˜nido por una fuerza de rigidez −sx se convierte en:
md2x
Se observa que la ecuaci´on para libre oscilaci´on de carga en un circuito que contiene
inductancia, resistencia y capacitancia tiene la misma forma que la ecuaci´on anterior.
La inductancia es an´aloga a la masa m, la resistencia a la resistencia mec´anica Rm,
y la capacitancia al rec´ıproco de la rigidez s, esta ´ultima es la compliancia mec´anica
Cm = 1/s.
Para resolver la ecuaci´on es conveniente usar el m´etodo exponencial complejo,
asumiendo la soluci´on de la forma:
x=Aeγt
Al sustituir queda de la forma:
(mγ2+R
mγ+s)Aeγt = 0
Por lo tanto:
mγ2+R
mγ+s= 0
γ =−Rm
2m ±
q
Rm
2m
2
− s
m =−α±β
donde
α = Rm
2m β = q Rm 2m 2
− ms =
√
α2−ω
02 =jωd
Siendoωdel valor de amortiguaci´on de la frecuencia angular de vibraci´on. Para una
amortiguaci´on peque˜na la frecuencia amortiguada de vibraci´on es bastante cercana a
la frecuencia sin amortiguamiento. Por lo que la soluci´on general ser´ıa:
x=Ae−αtcos(ω
en donde A y Φ son constantes reales determinadas por las condiciones iniciales.
La amplitudAe−αt no es constante y decrece exponencialmente con el tiempo.
Simi-larmente al oscilador sin amortiguaci´on la frecuencia es independiente a la amplitud
de oscilaci´on, pero es siempre menor que la correspondiente a la del oscilador sin
amortiguaci´on.
Para saber la velocidad con las cuales las oscilaciones son amortiguadas por la
fricci´on se toma el tiempo requerido al cual la amplitud decrece a 1/e de su valor
inicial. Este tiempo se llama modulo de decaimiento y est´a dado por la expresi´on:
τ = 1α = R2mm
Mientras m´as peque˜na sea Rm, m´as larga ser´a τ, lo que indica que tomar´a m´as
tiempo para amortiguar las oscilaciones.
1.8.
Oscilaciones Forzadas
Un oscilador simple se mantiene en su condici´on de vibraci´on al aplic´arsele una
fuerza motriz senoidal. Si se representa esta fuerza motriz con la expresi´on f =
F cos?ωt, la ecuaci´on diferencial para el movimiento de un oscilador amortiguado
resulta:
mddt2x2 +Rm
dx
dt +sx=F cosωt
Pudi´endose reescribir de la forma:
md2x
dt2 +Rmdxdt +sx =F ejωt
Tomando el desplazamiento de la forma x=Aejωt la ecuaci´on se transforma en:
(−Aω2m+jAωR
m+As)ejωt =F ejωt
A= jωR f
m+(s−ω2m)
As´ı que el desplazamiento ser´ıa:
x= −jF ejωt
ωRm+j(ωm−ms
La analog´ıa con los circuitos el´ectricos se vuelve m´as visible a partir de esta
ecua-ci´on si definimos la impedancia mec´anica compleja Zm del sistema como:
Zm =Rm+j ωm− ms
=Rm+jXm =Zme−jωt
donde la reactancia mec´anica Xm est´a definida como ωm−s/ω. La magnitud de
la impedancia mec´anica es:
Zm =
q
Rm2+ ωm− ωs
2
=pRm2+Xm2
y el ´angulo de fase es:
Φ =tan−1ωm−s/ω
Rm =tan −1Xm
Rm
Esta definici´on deZm es exactamente an´aloga a la impedancia el´ectrica compleja
de las series de circuitos, con la resistencia mec´anica Rm an´aloga a la resistencia
el´ectrica, la masaman´aloga a la inductancia el´ectrica, y la rigidez mec´anicasan´aloga
al rec´ıproco de la capacitancia el´ectrica. Enf´asis a˜nadido en que aunque el Ohm
mec´anico es an´alogo al Ohm el´ectrico, estas dos cantidades no tienen las mismas
unidades fundamentales. El Ohm el´ectrico tiene dimensiones de un voltaje dividido
entre una corriente, mientras que el ohm mec´anico tiene dimensiones de fuerza dividio
entre la velocidad.
Usando la definici´on de Zm podemos reescribir el desplazamiento como:
x= −jF eωZj(ωtm−Φ)
El desplazamiento actual est´a dado por la parte real de la ecuaci´on anterior la
x= F sinωZ(ωt−Φ)
m =
F sin(ωt−Φ) ω
r
Rm2+ ωm−ωs 2
En varios problemas mec´anicos y ac´usticos el conocimiento de la velocidad es
m´as importante que el conocimiento del desplazamiento. Al diferenciar esta ´ultima
ecuaci´on tendremos definida la velocidad compleja que es:
v = F ejωt
Rm+j(ωm−ms) =
F ejωt+Φ
Zm
La velocidad actual est´a dada por la parte real de esta ´ultima ecuaci´on, por lo que
se establece que la velocidad es:
v = F cosZ(ωtm−Φ) = r F cos(ωt−Φ)
Rm2+ ωm−ωs 2
La relaci´on F/Zm indica la magnitud num´erica de la m´axima velocidad del
osci-lador.
El ´angulo de fase Φ es el ´angulo entre la velocidad y la fuerza motriz. Cuando
el ´angulo es positivo indica que la velocidad retrasa la fuerza motriz en el ciclo de
movimiento por el ´angulo Φ, y cuando el ´angulo es negativo indica que la velocidad
adelanta la fuerza motriz. A muy altas frecuencias el ´angulo de retraso se aproxima
a 90◦; a muy bajas frecuencias el ´angulo de adelanto se aproxima a 90◦. En algunas
frecuencias intermedias la reactancia mec´anica Xm desaparece, y la velocidad y la
fuerza motriz est´an de nuevo en fase entre ellas. A esta frecuencia la amplitud de la
velocidad tambi´en tiene su valor m´aximo: F/Zm.
1.9.
Relaciones de Potencia
La potencia instant´anea en watts es suministrada en el sistema por la fuerza
motriz es igual al producto de la fuerza motriz instant´anea y la velocidad resultante.
Substituyendo las expresiones apropiadas de fuerza y velocidad, tenemos:
Wi =F cosωtF cosZ(ωtm−Φ) = F
2
En la mayor´ıa de las situaciones la potencia promedioW que es proporcionada al
sistema es de mayor relevancia que la potencia instant´anea. La potencia promedio es
igual al trabajo total realizado por la vibraci´on completa, dividida por el tiempo de
una vibraci´on. Por lo tanto:
W =
RT
0 Widt
T
Substituyendo las ecuaciones anteriores, tendremos:
W = ZFm2T RT
0 cosωtcos(ωt−Φ)dt
W = F2
2ZmcosΦ
Esta potencia promedio suministrada al sistema por la fuerza motriz no es
almace-nada permanentemente en el sistema, por el contrario, es disipada en forma de trabajo
empleado en el movimiento del sistema en contra de la fuerza de fricci´on. Se debe
notar que la expresi´on para la potencia promedio es an´aloga en la forma que se
ex-presa la potencia de disipaci´on en los circuitos el´ectricos que comprenden resistencia,
inductancia y capacitancia. De conformidad con la nomenclatura el´ectrica la
expre-si´on cosΦ est´a definida como: factor de potencia mec´anica. Ya que cosΦ = Rm/Zm,
la expresi´on de potencia puede reescribirse como:
W = F2Rm
2Zm2
La potencia promedio tiene su m´aximo valor cuando la reactanciaXm desaparece.
1.10.
Frecuencia de Resonancia Mec´
anica
La frecuencia de resonancia mec´anica est´a definida como la frecuencia a la cual la
reactancia Xm desaparece. Es la frecuencia en la cual la fuerza motriz abastecer´a la
potencia m´axima al oscilador. Es la frecuencia a la cual la impedancia mec´anica tiene
su valor m´ınimo de Zm =Rm, siendo una cantidad real. Tambi´en es la frecuencia de
m´axima amplitud de velocidad, as´ı entonces la ecuaci´on de velocidad se ve reducida
vres = RFmcosω0t
A la frecuencia de resonancia la ecuaci´on del desplazamiento se reduce a:
xres=F ω0Rmsinω0t
Por lo que se asume que el desplazamiento tiene su mayor amplitud en la frecuencia
de resonancia ω0 y que su amplitud es F/ω0Rm.
El ancho de banda Q de la frecuencia de resonancia estar´a determinado por Rm,
si laRm es peque˜na, la curva caer´a de manera pronunciada. Por el otro lado si laRm
es grande la curva caer´a de manera menos abrupta.
Q= ω0m
Rm
1.11.
Relaciones de Fase e Impedancia
Ya que el ´angulo de fase Φ es cero en resonancia, la velocidad de resonancia est´a
en fase con la fuerza motriz F, mientras que el desplazamientox retrasa a F en 90◦.
Cuando la frecuenciaω es mayor queω0, tanto la reactancia mec´anica como el ´angulo
de fase son positivos, por lo que la velocidad retrasa aF por un ´angulo que se acerca a
90◦ cuandoω se acerca a infinito, mientras el retraso del desplazamiento con respecto
aF se acerca a 180◦. Cuando ω es menor queω
0, tanto la reactancia mec´anica como
el ´angulo de fase son negativos, por lo que mientras ω se acerca a cero la velocidad
adelanta aF por un ´angulo que se acerca a 90◦, mientras el retraso del desplazamiento
con respecto a F es reducido, y se acerca a cero. En sistemas que tienen resistencia
mec´anica relativamente peque˜na los ´angulos de fase tanto de la velocidad como del
desplazamiento var´ıan r´apidamente con cambios peque˜nos en ω en la cercan´ıa de la
Cap´ıtulo 2
Altavoces de Bobina M´
ovil
2.1.
Introducci´
on
Un altavoz es un transductor que convierte la energ´ıa el´ectrica en energ´ıa mec´anica
y esta a su vez en energ´ıa sonora. El altavoz es el ´ultimo elemento en la reproducci´on
del sonido y ser´a definitivo para tener una fiel generaci´on de ondas sonoras semejantes
a las que se obtuvieron de la fuente sonora original.
2.2.
Constituci´
on
La transformaci´on de energ´ıa el´ectrica en ondas sonoras no se lleva acabo
directa-mente, sino que en realidad los altavoces transforman la energ´ıa el´ectrica en mec´anica
y, en segundo paso la energ´ıa mec´anica en energ´ıa ac´ustica.
Atendiendo a estas caracter´ısticas, podemos dividir los elementos constituyentes
de un altavoz en las siguientes partes:
Parte electromagn´etica: constituida por el im´an y la bobina m´ovil. En esta parte la energ´ıa el´ectrica llega a la bobina m´ovil situado dentro del campo magn´etico
del im´an y por tanto se produce el movimiento de la bobina m´ovil.
Parte ac´ustica es la que transmite al recinto de audici´on la energ´ıa sonora desarro-llada por el cono.
[image:27.595.134.490.159.511.2]2.3.
Partes del Altavoz de Bobina M´
ovil
Figura 2.1: Partes del Altavoz de Bobina M´ovil
Suspensi´on del borde flexible. Es la parte final del cono, que le permite tener m´as movilidad sin romperse debido a su zona de rugosidad el´astica.
Bobina m´ovil. Su misi´on es producir un campo magn´etico constante dentro de una c´amara de aire o entrehierro en el cual se aloja la bobina.
Tapa polvo. Es la encargada de evitar que pase el polvo al im´an.
Polo central.Es la pieza cil´ındrica que se encuentra en el hueco de las placas polares y delimita el interior del entrehierro.
Cono (diafragma). Con sus vibraciones comprime y expande el aire que se
encuentra en contacto con el, originando el sonido, m´usica o palabra.
Estructura de soporte (campana).Sirve para concentrar el campo magn´eti-co magn´eti-constante y evitar perdidas de flujo del im´an.
Im´an. Su misi´on es producir un campo magn´etico constante dentro de una c´amara de aire o entrehierro.
Barreno de la placa polar.Es la perforaci´on cil´ındrica a trav´es de la placa polar, que delimita el di´ametro exterior del entrehierro.
Placas polares. Es la parte del sistema magn´etico que tiene una perforaci´on cil´ındrica y que, en uni´on con el polo central forman el entrehierro.
2.4.
Principio de Operaci´
on
Su funcionamiento se basa en la interacci´on de campos magn´eticos y corrientes.
Cuando la tensi´on de la se˜nal el´ectrica aplicada a la bobina es positiva, el
diafrag-ma del altavoz se desplaza hacia el exterior, mientras que si la tensi´on es negativa, el
sentido es el opuesto: hacia el interior del altavoz.
Funciona al hacer reaccionar el campo magn´etico variable creado por una bobina
con el campo magn´etico fijo de un im´an.
Esto hace que se produzcan fuerzas, que son capaces de mover una estructura
Figura 2.2: Esquema de Bloques de transducci´on
A su vez, esta estructura m´ovil est´a sujeta por dos puntos mediante unas piezas
flexibles y el´asticas que tienen como misi´on centrar al altavoz en su posici´on de reposo.
El sistema de excitaci´on tambi´en conocido como motor de altavoz, est´a constituido
b´asicamente por un im´an permanente que posee un fuerte campo magn´etico; dentro
de ese campo est´a situada una bobina m´ovil que est´a unida al cuello del diafragma.
En la figura 1.2, se ve el esquema de bloques de un altavoz, dondee(t)ei(t)podr´ıa
ser energ´ıa el´ectrica y corriente el´ectrica,f(t)yu(t)ser´an magnitudes mec´anicas como
fuerza y velocidad, y p(t) y U(t) ser´an magnitudes ac´usticas como la presi´on y la
Cap´ıtulo 3
Caracter´ısticas del Altavoz de
Bobina m´
ovil
3.1.
Introducci´
on
Se ha visto anteriormente el principio de funcionamiento de un altavoz, prestando
especial atenci´on a los altavoces electrodin´amicos por ser los m´as utilizados. Esto nos
ha permitido comprender que la calidad de cada elemento que los compone determina
las caracter´ısticas del mismo. Para elegir el altavoz adecuado debemos estudiar las
caracter´ısticas que brindan los fabricantes y actuar en consecuencia, seg´un nuestra
necesidad.
Las caracter´ısticas t´ecnicas m´as importantes de un altavoz podemos resumirlas en
las siguientes:
Impedancia
Frecuencia de Resonancia
Respuesta de frecuencia
Potencia m´axima
Directividad
3.2.
Impedancia
La impedancia de un altavoz depende del tipo y de su forma constructiva. Los
factores determinantes de la impedancia de un altavoz son:
La resistencia ´ohmica del hilo de la bobina m´ovil, dependiente de la longitud,
secci´on y material del hilo, y que se calcula por la f´ormula:
R=ρl s
siendo R la resistencia de la bobina, ρ la resistividad del material utilizado, l la
longitud del hilo ys la secci´on del hilo.
La reactancia inductiva de la bobina m´ovil, dependiente de la frecuencia aplicada
y del coeficiente de autoinducci´on de la misma, seg´un la formula:
XL= 2πf L
en dondeXLes la reactancia inductiva,f es la frecuencia aplicada yLel coeficiente
de autoinducci´on.
Las corrientes inducidas en la bobina m´ovil, son la causa de sus desplazamientos
dentro del campo magn´etico de excitaci´on del im´an permanente.
Dichos desplazamientos estar´an condicionados por la forma constructiva del
al-tavoz (masa del diafragma, elasticidad de suspensi´on, volumen de aire de la caja
ac´ustica, etc.)
Los fabricantes de altavoces indican la impedancia de los mismos para una
fre-cuencia dada, y ya preestablecida internacionalmente, cuyo valor es de 1000 Hz. Para
esta frecuencia, la impedancia de los altavoces electrodin´amicos oscila entre 2 y 8 Ω,
seg´un dise˜no.
La impedancia del altavoz se debe a que en la bobina se produce una acci´on
electro-magn´etica que hace que se mueva cuando es recorrida por corriente; este movimiento
inducir´a en ella una tensi´on y circular´a una corriente entendi´endose que este es un
efecto resistivo.
Si bien es conveniente que el altavoz tenga impedancia constante en toda la gama
de audio para no modificar la recta de carga de la salida del amplificador, esto es
imposible
La impedancia de un altavoz no es constante: var´ıa con la frecuencia. En
frecuen-cia alta, la impedanfrecuen-cia es proporcional a la frecuenfrecuen-cia. En la frecuenfrecuen-cia baja o de
[image:32.595.133.493.247.462.2]resonancia la impedancia aumenta bruscamente.
Figura 3.1: Impedancia de altavoces con diferente di´ametro
3.3.
Respuesta en Frecuencia
La curva de respuesta de frecuencia es una de las caracter´ısticas m´as importantes
de los altavoces, pues mediante ella se puede conocer la intensidad sonora
proporcio-nada por el altavoz para cada una de las frecuencias de audio que debe reproducir, es
Figura 3.2: Respuesta en Frecuencia
3.4.
Frecuencia de Resonancia
El valor de frecuencia para la cual la impedancia es m´axima, se denomina
frecuen-cia de resonanfrecuen-cia. Cuanto menor es el di´ametro del altavoz mayor es la frecuenfrecuen-cia que
necesita aplic´arsele para que su impedancia sea m´axima.
Entre los factores que influyen sobre la frecuencia de resonancia cabe destacar el
di´ametro del diafragma, de tal forma que podemos decir que la frecuencia de
reso-nancia es inversamente proporcional al di´ametro del diafragma. Cuanto menor es el
di´ametro del diafragma mayor ser´a la frecuencia de resonancia del altavoz.
Tambi´en el sistema de suspensi´on del diafragma influye sobre la frecuencia de
re-sonancia. Cuanto m´as fuerte sea la suspensi´on del diafragma, mayor ser´a la frecuencia
de resonancia.
La frecuencia de resonancia var´ıa en relaci´on inversa al di´ametro del cono. Por
ejemplo un altavoz de 5”de di´ametro (12.5 cm) tendr´a una frecuencia de resonancia
mayor que uno de 12”(30.5 cm) de iguales caracter´ısticas.
frecuen-cia de resonanfrecuen-cia superior que otro cuyo diafragma es ligero. Una suspensi´on fuerte
aumentar´a la frecuencia de resonancia del altavoz.
3.5.
Directividad
La directividad de un altavoz se suministra a partir de sus diagramas polares. Su
respuesta no es omnidireccional y posee caracter´ısticas bien definidas.
Para conocer la direccionalidad de un altavoz se recurre a los diagramas polares
de directividad. Las curvas de directividad se trazan para diversas frecuencias, ya que
a medida que crece la frecuencia, para un mismo diafragma, el altavoz se hace m´as
[image:34.595.133.490.298.512.2]directivo.
Figura 3.3: Forma de Medici´on del Patr´on de Radiaci´on
El ´angulo de cobertura de un altavoz ser´a aquel en que su presi´on sonora muestre
un decaimiento de - 6 dB en relaci´on al eje del altavoz.
Si a 1 m del centro de un altavoz, en su eje perpendicular al cono con un son´ometro,
se mide el nivel de sonido en dB y luego vamos moviendo el son´ometro hacia la derecha
a la primera medida, ah´ı se encuentra uno de los laterales del ´angulo de cobertura,
[image:35.595.152.471.103.471.2]siendo el otro lado el opuesto por igual distancia con el eje.
Figura 3.4: Patr´on de Radiaci´on
3.6.
Distorsi´
on
La distorsi´on arm´onica en los altavoces suele representarse por mediaci´on de curvas
separadas por arm´onicos, ya que es importante conocer de que n´umero de arm´onico
se trata. As´ı, la distorsi´on producida por los arm´onicos impares (3, 5, 7, etc.) es
mucho m´as desagradable que la producida por los arm´onicos pares, pues estos est´an
Figura 3.5: Distorsi´on arm´onica de se˜nal
La distorsi´on arm´onica en los altavoces no sigue una gr´afica lineal, es decir no
existe el mismo porcentaje para todas las frecuencias. Generalmente la distorsi´on
arm´onica aumenta a medida que disminuye la frecuencia.
Todas las curvas de distorsi´on arm´onica de los altavoces deben ser referidas al
mismo nivel de salida, generalmente 90 dB a 1 metro de distancia, independientemente
de la se˜nal que se necesite para producirlo.
De acuerdo con lo expuesto, una forma de indicar num´ericamente la distorsi´on
arm´onica ser´ıa:
Segundo Arm´onico menor a 2 % de 20 Hz a 150 Hz
Tercer Arm´onico menor a 2 % de 20 Hz a 150 Hz
menor a 1 % de 150 Hz a 20,000 Hz
Valores medidos a 1 m de distancia axial y un nivel de presi´on sonora (SPL) de
90 dB en condiciones anecoica.
El nivel m´aximo deseable de distorsi´on es del 1 %, el cual se sobrepasa f´acilmente
al aumentar la potencia de entrada del altavoz.
3.7.
Potencia m´
axima
La potencia admisible de un altavoz es el valor m´aximo de potencia que puede
aplic´arsele durante un corto intervalo de tiempo, sin que se deteriore.
No debe confundirse la potencia admisible con la potencia de r´egimen la cual es la
potencia m´axima que puede aplicarse a un altavoz de forma continua. Normalmente
los fabricantes suelen suministrar ambos datos.
La potencia de un altavoz depende de sus dimensiones y forma constructiva. Para
un mismo di´ametro de diafragma, la potencia admisible es funci´on directa de sus
dimensiones.
La potencia admisible por un altavoz ha de ser sin que el amplificador recorte
la se˜nal, ya que entonces se generan arm´onicos de frecuencias elevadas que pueden
da˜nar los altavoces de agudos. A este respecto cabe decir que es m´as f´acil estropear
un altavoz con un amplificador de poca potencia que con uno de mayor potencia, pues
Cap´ıtulo 4
An´
alisis de altavoces
4.1.
Introducci´
on
Los altavoces son dispositivos dise˜nados para radiar la energ´ıa ac´ustica a trav´es
de un medio como por ejemplo el aire, los m´as conocidos son los altavoces de bobina
m´ovil, el cual utiliza un acoplamiento electrodin´amico existente entre el movimiento
de la superficie vibratoria, llamada cono o diafragma, y la corriente en una bobina.
4.2.
Altavoz de Radiaci´
on Directa Ideal
Consideremos un cono de altavoz r´ıgido en forma de pist´on de radio a, montado
dentro y radiando sobre un lado de un bafle infinito plano. La impedancia mec´anica
total de dicho cono del altavoz ser´ıa:
Zm=Zr+Zc
donde Zr est´a asociada con la parte de radiaci´on ac´ustica del cono del altavoz y
Zc la impedancia mec´anica agrupada constante del sistema de cono. Esta impedancia
est´a dada por:
Zc =Rm+j[ωm−(s/ω)]
dondeRmes la resistencia mec´anica la cual es asociada con las p´erdidas de energ´ıa
el cono a su borde exterior y cerca de la bobina con la finalidad de moverse libremente
s´olo en una direcci´on axial. La cantidadmrepresenta la masa movible total del sistema
de cono, es decir es la suma de la bobina y el cono, y s es la rigidez del sistema que
se opone al movimiento axial contribuido por el material corrugado en el borde y el
centro del cono. Para las altas frecuencias el cono no se mueve como una unidad, en
cambio serompeen zonas, algunas de las cuales se mueven hacia fuera mientras otras
lo hacen hacia dentro. Cuando esto ocurre, el simple an´alisis agrupado constante que
corresponde deber´a ser modificado. La impedancia de radiaci´on Zr est´a dada por:
Zr =Rr+jXr
donde Rr es la carga de resistencia de radiaci´on e un pist´on circular y Xr es la
carga de reactancia de radiaci´on. En varios tipos de montaje, el cono de un altavoz
de radiaci´on directa experimenta una carga de radiaci´on en su superficie trasera al
igual que en su superficie delantera. Sin embargo, para hacer el an´alisis se ignorar´a
cualquier carga de la superficie trasera.
La bobina de este tipo de altavoz est´a directamente sujetado a la superficie de
vibraci´on y es capaz de moverse hacia y fuera de un campo magn´etico cuya direcci´on
es perpendicular al devanado de la bobina. Si el campo magn´etico en el cual la bobina
se mueve se toma como uniforme, entonces la fuerza motriz f aplicada al cono del
altavoz es directamente proporcional a la corrientei fluyendo a trav´es de la bobina y
est´a dada por:
f =Bli
en dondeB es la densidad de flujo del campo magn´etico expresado enwebers/m2,
les la longitud del conductor en la bobina expresada en metros, la corrienteies
expre-sada en amperes, y la fuerzaf en newtons. Si ahora asumimos una corriente compleja
que fluya en la bobina, producir´a una velocidad compleja en estado estacionario del
i=Iejωt
v = Zfm = BliZm
Ya que Zm es en general compleja, la velocidad instant´anea puede esperarse que
difiera en fase con respecto a la corriente. Cuando un altavoz es alimentado una
amplitud rms de corriente alterna I, puede ser usada para obtener la amplitud rms
de velocidad V del cono del altavoz a cada frecuencia.
Si consideramos el comportamiento del altavoz cuando un voltaje e = Eejωt es
suministrado a las terminales de su bobina, asumiremos que la impedancia el´ectrica
ordinaria de la bobina ZE est´a dada por:
ZE =RE +jωLE
donde RE es la resistencia ´ohmica del conductor el´ectrico en la bobina y LE es
la inductancia en henries. Ahora, si el voltaje e es aplicado a las terminales de la
bobina, se podr´a observar que la corriente en estado estacionario no est´a expresada
por la ecuaci´on simplei=e/ZE. Estos resultados del hecho que un movimiento de la
bobina en el campo magn´etico del altavoz genera una fuerza contra electromotriz en
volts est´a dado por la ecuaci´on:
em =Blv
dondeB est´a expresada en webers/m2, l en metros, yv en metros/seg. Si
substi-tuimosv en esta ecuaci´on, obtendremos:
em = B
2l2
Zm i=
Φ2
Zmi
en donde la constante Φ = Bl es un factor de transformaci´on expresado en
we-bers/m relacionando cantidades el´ectricas con mec´anicas. Cuando la fuerza
electro-motriz se toma en consideraci´on, la ecuaci´on para obtener la corriente de la bobina
i= e−em
ZE
la cual al substituir em y resolver para i queda como:
i= e
ZE+(Φ2/Zm)
Es aparente que la cantidad Φ2/Z
m debe ser de naturaleza de una impedancia
el´ectrica. Como consecuencia, podemos reemplazar dicho termino por la impedancia
de movimientoZM que est´a definida por:
ZM = Φ
2
Zm =
Φ2
Zr+Zc =
Φ2
(Rr+Rm)+j(Xr+ωm−ωs)
La impedancia de movimiento ZM es de ´ındole de una impedancia el´ectrica,
me-dida en ohms el´ectricos, en contraste con la impedancia mec´anica Zm, la cual est´a
medida en kilogramos por segundo.
Esta ecuaci´on nos indica que mientras m´as grande sea la impedancia mec´anica
Zm del cono del altavoz, m´as dif´ıcil ser´a de mover, y m´as peque˜na impedancia de
movimientoZM y una menor fuerza contra electromotriz es generada. Para una
im-pedancia mec´anica infinita resultar´ıa en ning´un movimiento y por lo tanto no habr´ıa
fuerza contra electromotriz, la cual es equivalente en una impedancia de movimiento
cero. Cuando el cono est´a bloqueado tal que no pueda moverse, la ´unica
impedan-cia el´ectrica presente es la de la bobina ZE. Como consecuencia, esta impedancia es
frecuentemente referida como impedancia de bloqueo.
En el an´alisis de altavoces de radiaci´on directa as´ı como en otro transductores
elec-troac´usticos, es conveniente el remplazar el sistema mec´anico por un sistema el´ectrico
equivalente. Por ejemplo, las corrientes producidas en la bobina del altavoz son
re-sultado de un voltaje aplicado a trav´es de un circuito. Los elementos de movimiento
RM r, RM m y XM de este circuito se obtuvieron por una racionalizaci´on de ecuaci´on
compleja de la impedancia de movimiento. Por ejemplo la componente reactiva XM
XM =−Φ
2(X
r+ωm−s/ω)
Zm2
y la componente resistiva total RM por:
RM = Φ
2(R
r+Rm)
Zm2
De la componente resistiva total RM, s´olo la parte dada por:
RM r = Φ
2Rr
Zm2
est´a asociada con la transferencia de energ´ıa el´ectrica en energ´ıa ac´ustica. El resto
RM m = Φ
2Rm
Zm2
est´a asociado con la disipaci´on de energ´ıa en el cono flexible y en los soportes
corrugados.
Ya que la eficiencia electroac´usticaηdel altavoz debe ser id´entica a la equivalente
del circuito el´ectrico, entonces:
η= RM r
RM r+RM m+RE
Cuando las respectivas expresiones deRM r yRM m son substituidas en esta
ecua-ci´on, la eficiencia puede ser expresada, como:
η= Φ2Rr
Φ2(Rr+Rm)+REZm2
donde
Zm2 = (Rr+Rm)2 + (Xr+ωm−s/ω)2
Cuando una corriente alterna Icosωt es proporcionada a la bobina, la potencia
ac´ustica radiada en watts est´a dada por:
W =I2R
M r = Φ
2RrI2
la cual es la potencia disipada por la parte correspondiente de el circuito
el´ectri-co equivalente. Por otro lado, cuando un voltaje alterno Ecos?ωt es aplicado a las
terminales de la bobina, la corriente est´a dada por:
I = ZE
I =
E
[(RE+RM)2+(ωLE+XM2]
1 2
dondeZI representa la impedancia el´ectrica de entrada total, incluyendo la
impe-dancia de bloqueoRE+jωLE de la bobina, y la impedancia de movimientoRM+jXM
asociada con el movimiento de la bobina. Por consecuencia:
W = Φ2RrE2
Zm2ZI2
expresa la salida ac´ustica en watts cuando un voltaje conocidoE es aplicado a las
terminales de la bobina.
4.3.
Ejemplo de Altavoz de Radiaci´
on Directa
Ahora se muestra una gr´afica de la impedancia mec´anica de un altavoz con los
va-lores de la resistencia mec´anica (Rr+Rm), la reactancia mec´anica [Xr+ωm−(s/ω)],
y la magnitud de la impedancia total Zm. Se observa que la resistencia mec´anica
primero aumenta lentamente desde su valor m´ınimo de 1 ohm mec´anico a bajas
fre-cuencias, experimenta un r´apido incremento entre 100 y 1000 Hz, y despu´es fluct´ua
cerca del valor de 14 ohms mec´anicos en frecuencias m´as altas. En frecuencias muy
bajas la reactancia tiene valores negativos, lo cual resulta de la rigidez del sistema de
suspensi´on. Esta reactancia est´a reducida a cero en la frecuencia de resonancia, en
este caso de 62 Hz. Si la frecuencia es aumentada la reactancia se convierte en positiva
y aumenta gradualmente, hasta frecuencias arriba de 1000 Hz puede ser considerado
igual a 0.01ω. La magnitud deZm tiene un valor m´ınimo de 1.085 ohms mec´anicos en
la frecuencia de resonancia, y en todas las frecuencias diferentes a aquellas cercanas
a las inmediaciones inmediatas puede ser considerada id´entica a la magnitud de la
Figura 4.1: Impedancia mec´anica de un altavoz de pist´on
En la figura anterior se pueden observar los valores de la eficiencia electroac´ustica
del altavoz. Se puede notar que la eficiencia aumenta a un valor m´aximo de 6.1 % en
la frecuencia de resonancia mec´anica. Debajo de esta frecuencia la eficiencia decrece
r´apidamente, ya queRr es proporcional af2 y Zm a 1/f. En este rango de eficiencia
es por lo tanto proporcional a la cuarta parte de la potencia de la frecuencia.
Se pueden observar los valores de la impedancia de movimiento ZM, junto con
sus componentes resistivas y reactivas. La resistencia de movimiento RM aumenta a
un valor m´aximo de 19 ohms el´ectricos en la frecuencia de resonancia mec´anica. De
cualquier forma, en esta frecuencia en particular s´olo 1.5 ohms de la gran resistencia de
Figura 4.2: Eficiencia de un altavoz de pist´on en funci´on de la frecuencia
mec´anica Rm del sistema de suspensi´on.
En esta curva se muestran los valores de la impedancia de entrada el´ectrica total
ZI en las terminales de la bobina, junto con sus componentes resistivas y reactivas.
La componente resistiva es id´entica al de la figura anterior excepto porque los valores
se han incrementado en 5 ohms. A bajas frecuencias la reactancia es primordialmente
relacionada con la impedancia de movimiento. De cualquier forma, a una frecuencia
de 450 Hz la reactancia inductiva positiva ωLE de la bobina iguala a la reactancia
de movimiento negativa y resulta en una segunda frecuencia a la cual la reactancia
el´ectrica es reducida a cero. Finalmente, a frecuencias arriba de 4000 hz se observa
que la reactancia inductiva ωLE es la componente predominante de la impedancia
el´ectrica de entrada. Es de notar que arriba de las frecuencias en el rango de 200
a 2000 hz la impedancia de entrada es primordialmente resistiva y casi iguala a la
Figura 4.3: Impedancia de movimiento de un altavoz de pist´on en funci´on de la frecuencia.
4.4.
Altavoz
Al considerar las caracter´ısticas de un altavoz t´ıpico en comparaci´on con aquellas
de un altavoz de pist´on, en el altavoz t´ıpico el patr´on de radiaci´on de sonido es de
alg´un modo mayor al obtenido con un altavoz de pist´on, debido a la flexibilidad
de la superficie de radiaci´on. Este efecto resulta de la velocidad finita de las ondas
transversales en el cono, la cual causa el movimiento en las partes externas del cono
que se retrasen por detr´as de la bobina y la parte central. El decremento observado
en la direccionalidad es mas pronunciado para conos de ´angulos de radiaci´on mayores
Figura 4.4: Impedancia de entrada el´ectrica de un altavoz de pist´on en funci´on de la frecuencia.
frecuencias por arriba de la frecuencia fundamental de resonancia de la superficie de
cono, la falta de rigidez causa que el cono vibre en zonas circulares de fases opuestas,
por consecuencia el radio efectivo del cono decrece mientras la frecuencia aumenta,
lo cual resulta en una ampliaci´on en el patr´on de radiaci´on de sonido. Un segundo
efecto de esta reducci´on del radio efectivo del cono es el de reducir la resistencia de
radiaci´on Rr, el cual es proporcional al cuadrado del radio. Dicha reducci´on en la
resistencia de radiaci´on lograr´a adem´as reducir la salida ac´ustica de los altavoces a
frecuencias altas. De cualquier forma, es debido en cierta medida contrabalanceado
El cono de altavoz simple consiste en una bobina de masamc, sujeta a un cono de
papel r´ıgido de masamp, cuyo radio en el aro externo esay cuya altura de inclinaci´on
esl. El ´angulo resultante de cono θ est´a dado por:
sinθ 2 =
[image:48.595.258.367.143.361.2]a l
Figura 4.5: Cono de Altavoz Simple y Sistema de Suspensi´on.
La rigidez s es aportada al sistema tanto por s1, la rigidez del corrugado en el
aro externo del cono, y por s2, que corresponde al disco central o ara˜na sujeta a la
bobina.
A frecuencias bajas en las cuales el tiempo requerido para un desplazamiento del
centro del cono a ser propagadas por el aro es peque˜no en comparaci´on con el periodo
de vibraci´on, el cono de papel podr´a tomarse que vibra como una superficie r´ıgida.
Su patr´on de radiaci´on es similar al del pist´on de masa mp +mc, rigidez s1+s2, y
radioa. La velocidad de las ondas transversales en un cono es en general una funci´on
de su rigidez, grosor, ´angulo de cono, etc., as´ı como a la frecuencia motriz.
A frecuencias altas el cono no vibra c´omo una unidad, en cambio vibra en zonas
separadas, separadas por nodos. La amplitud de vibraci´on en las zonas externas es
puede ser considerado que viene de un pist´on central cuyo radio a′ y masa m′
p
gra-dualmente decrece con el incremento de la frecuencia. Este decrecimiento en el radio
efectivo del radio causa que la resistencia de radiaci´onRr decrezca aproximadamente
en (a′/a)2. Como el sistema es controlado por la masa en frecuencias altas, la
im-pedancia mec´anica Zm es aproximadamente igual a (mc+m′p)ω. Como resultado de
disminuir m′
p con un incremento en la frecuencia, Zm no se incrementa tan
r´apida-mente como en un pist´on r´ıgido, donde mp permanece constante. El resultado neto
de estos dos efectos es el de producir un incremento en la eficiencia del altavoz de
como en frecuencias superiores a 1000 Hz.
Si la tendencia de un cono de vibrar en frecuencias altas como un pist´on circular de
radio peque˜no es mayormente provocado por las construcci´on del cono en un n´umero
de corrugaciones circulares. A frecuencias bajas la rigidez de reactanciass′
1/ω, s′′1/ω,
ys′′′
1/ω son grandes comparadas con las masas de reactanciaωm′′p,ωm′′′p,ωm′′′′p , y por
consiguiente el cono vibra como una unidad, la masa efectiva es la del cono entero m´as
la bobina, y la rigidez efectiva es s2+s′′′′1 . Al incrementar la frecuencia la rigidez de
las reactancias decrece, mientras que la masa de las reactancias aumenta, por lo que
en zonas externas del cono puede verse como sucesivo decaimiento en el movimiento
quedando ´unicamente las zonas internas. En ´ultima instancia s´olo la parte central del
cono vibra, su masa efectiva esmc+m′p y su rigidez s2 +s′1.
Mantener una salida ac´ustica uniforme en los altavoces a frecuencias muy bajas
es m´as dif´ıcil de resolver que el mismo problema en frecuencias altas. Un m´etodo
para mejorar la respuesta en frecuencias bajas es el de aumentar el radio del altavoz.
Esto incrementa la resistencia de radiaci´on en proporci´on directa de la potencia del
radio y corresponde a un incremento en la eficiencia. La respuesta en frecuencias
bajas puede mejorarse al reducir la rigidez del sistema de suspensi´on y por lo tanto
bajando la frecuencia de resonancia mec´anica. Aunque si la reducci´on en la rigidez
del sistema mec´anico es demasiada, su desplazamiento en frecuencias bajas aumenta,
Figura 4.6: Cono de Altavoz Corrugado.
Obtener los requerimientos adecuados en una salida ac´ustica tanto en bajas como
en altas frecuencias es imposible, y por lo tanto se requiere de un sistema de altavoces
en un rango amplio que sea de al menos dos unidades, una designada para la radiaci´on
efectiva de la potencia en frecuencias graves, y la otra para el rango de frecuencias
altas.
4.5.
Efecto de los par´
ametros de la bobina
Excepto en las inmediaciones de la resonancia mec´anica, el t´ermino REZm2 en la
ecuaci´on de eficiencia es mucho mayor a Φ2(R
r +Rm). Por lo que podemos asumir
que:
η≈ Φ2R
r
REZm2
es una ecuaci´on de aproximaci´on de la eficiencia del altavoz sobre la porci´on mayor
del rango de frecuencia ´util.
Debido a que Φ es por definici´on igual a Bl, es directamente proporcional a la
densidad de flujo en el entrehierro, con esto es evidente que todos los factores que
incrementen a B tambi´en incrementar´an la eficiencia, y por lo tanto la salida del
campo magn´etico y reducir el espacio en el entrehierro del im´an permanente lo m´as
que sea posible.
Incrementar la longitud del conductor que forma el devanado de la bobina
aumen-tar´a la eficiencia, como se puede observar en la siguiente ecuaci´on:
η ≈ Φ2
RE ≈
l2
l =l
la cual indica que la eficiencia es directamente proporcional a la longitud l.
La mayor´ıa de las bobinas son construidas en forma de devanado circular alrededor
de un papel cil´ındrico, el uso de dicho soporte de bobina elimina la necesidad de
aumentar el espacio requerido en el entrehierro, resultando en un incremento de la
Cap´ıtulo 5
Medici´
on de los Par´
ametros de
Altavoces
5.1.
Introducci´
on
Para poder visualizar el funcionamiento de los altavoces de bobina m´ovil en este
cap´ıtulo se mostrar´an una serie de pr´acticas, con su metodolog´ıa correspondiente,
para obtener los par´ametros b´asicos de dichos altavoces.
5.2.
Pr´
acticas a realizar
Pr´actica 1: Constante de rigidez y Frecuencia de Resonancia
Pr´actica 2: Respuesta en Frecuencia de altavoces
Pr´actica 3: Compliancia Mec´anica y Compliancia Ac´ustica
Pr´actica 4: Masa del Diafragma y Bobina del Altavoz
Pr´actica 5: Densidad de Flujo Magn´etico
Pr´actica 6: Patr´on de Radiaci´on
Pr´actica 7: Impedancia del Altavoz
Estas pr´acticas tienen como finalidad ayudar a la comprensi´on de los par´ametros
5.2.1.
Pr´
actica 1: Constante de Rigidez (k) y Frecuencia de
Resonancia (fs)
Objetivo:
Determinar la constante k del cono utilizando el principio de rigidez que se basa
en la Ley de Hooke y es aplicado en altavoces; as´ı c´omo su frecuencia de resonancia.
Introducci´on Te´orica:
La ley de elasticidad de Hooke (o ley de Hooke), establece la relaci´on entre el
alargamiento o estiramiento longitudinal y la fuerza aplicada. Donde en este caso la
fuerza aplicada ser´a la combinaci´on de una masa externa y la constante de
acelera-ci´on gravitacional que es la que har´a que el cono se desplace m´as o menos distancia
dependiendo de la masa aplicada.
Si una masa m, sujeta a alg´un tipo de resorte y obligado a moverse hacia atr´as
y hacia delante en una sola direcci´on, es desplazada desde su posici´on central o de
reposo y es posteriormente liberada, se observar´a a la masa vibrar.
La frecuencia de vibraci´on constante y el desplazamiento de la masa desde su
posici´on de reposo es una funci´on senoidal. La masa vibrar´a en movimiento arm´onico
simple siempre que la fuerza de restauraci´on resultante de la rigidez del resorte sea
directamente proporcional al desplazamiento de la masa desde su posici´on de reposo.
Figura 5.1: Ejemplo de Oscilador simple
Se asume que la fuerza de restauraci´on f puede ser expresada por la ecuaci´on:
constante de rigidez del resorte, y el signo de menos indica que la fuerza es dirigida
en sentido opuesto al desplazamiento (que para nuestro caso no resulta´a necesario).
Un valor de frecuencia que se debe conocer es el valor para la cual la impedancia es
m´axima, la cual se denomina frecuencia de resonancia. Cuanto menor es el di´ametro
del altavoz mayor es la frecuencia que necesita aplic´arsele para que su impedancia sea
m´axima.
Entre los factores que influyen sobre la frecuencia de resonancia cabe destacar el
di´ametro del diafragma, de tal forma que se puede decir que la frecuencia de resonancia
es inversamente proporcional al di´ametro del diafragma. Cuanto menor es el di´ametro
del diafragma mayor ser´a la frecuencia de resonancia del altavoz.
Tambi´en el sistema de suspensi´on del diafragma influye sobre la frecuencia de
re-sonancia. Cuanto m´as fuerte sea la suspensi´on del diafragma, mayor ser´a la frecuencia
de resonancia.
Material:
Altavoz
Masa conocida (aro de acero)
Micr´ometro de profundidad o flex´ometro
Amplificador de potencia con una respuesta de frecuencia en el intervalo audible.
Oscilador que cubra el intervalo audible.
V´oltmetro
Desarrollo:
Sobre una mesa de prueba o de laboratorio colocar el altavoz y todo el material
para empezar a utilizarlo junto con una libreta para anotar mediciones antes de
En este caso no es necesario conectar nada ya que s´olo se obtendr´an magnitudes
f´ısicas.
Colocar el altavoz con su eje en posici´on vertical y poner sobre este la regla para
tener una referencia al medir la profundidad, c´omo se ve en la Fig. 5.2.
[image:55.595.209.424.209.352.2]Anotar la profundidad de referencia (x0).
Figura 5.2: Medici´on de la profundidad del cono sin masa
Colocar el anillo de acero (masa conocida) sobre el diafragma.
Medir el desplazamiento (X1) que tiene el cono con el peso agregado c´omo se
ve en la Fig. 5.3.
[image:55.595.209.420.515.653.2]Calcular la constante de rigidez k.
Teniendo los dos desplazamientos, se obtendr´a △x para sustituir en la ecuaci´on
(5,1) de la constante de rigidez.
F =kx
mg=k△x
k = mg
△x (5.1)
Hoja de C´alculos:
m (masa) =0.56857 Kg
g=9.81 m/s2
x0=distancia de referencia
x1=distancia con masa
Altavoz 1
x0= 3.7cm = 0.037 m
x1= 4.1cm = 0.041 m
k=1394.2 N/m
k= mg△x = (0,56857(0,041Kgm−)(90,037,81m/sm)2) = 1394,42N/m
Altavoz 2
x0= 2.8 cm = 0.028 m
x1= 3 cm = 0.03 m
k=2788.835 N/m
Altavoz 3
x0= 2.7cm = 0.027 m
x1= 2.8cm = 0.028 m
k=5577.67 N/m
k= mg△x = (0,56857(0,028Kgm−)(90,027,81m/sm)2) = 5577,67N/m
Frecuencia de Resonancia
Desarrollo:
[image:57.595.214.416.333.516.2]Conectar el equipo como se muestra en el Fig 5.4:
Figura 5.4: Diagrama de conexi´on para la obtenci´on de la Respuesta en Frecuencia.
Iniciando desde la frecuencia m´as baja que entrega el generador (20 Hz), y con
una amplitud de se˜nal, tal que, sea capaz de excitar el altavoz, hacer un barrido
de frecuencias hasta que se encuentre el primer valor m´aximo de voltaje.
Tomar 5 lecturas inferiores y 5 superiores a la frecuencia de resonancia. Graficar
los datos.
Hoja de C´alculos:
Los datos obtenidos en este procedimiento deber´an graficarse en papel logar´ıtmico,
cuyas coordenadas son, en las abscisas, la frecuencia en Hz y en las ordenadas la
amplitud en Volts.
F Resonancia V
41.35 Hz 1.452
Frecuencia Hz V
16 0.63
32 0.85
64 0.701
125 0.647
250 0.712
500 0.821
1000 1
2000 1.336
4000 1.552
8000 1.467