IMPLEMENTACIÓN NUMÉRICA DE
REDES NEURONALES ARTIFICIALES
PARA EL ANÁLISIS DE GRIETAS EN
PLACAS”
T E S I S
Q U E P A R A O B T E N E R E L G R A D O D E
M A E S T R O E N C I E N C I A S
CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
P
PRREESSEENNTTAA::
I
INNGG..GGEERRAARRDDOOHHEERRNNÁÁNNDDEEZZHHEERRNNÁÁNNDDEEZZ
D
DIIRREECCTTOORREESS::
D
DRR..LLUUIISSHHÉÉCCTTOORRHHEERRNNÁÁNNDDEEZZGGÓÓMMEEZZ
D
DRR..GGUUIILLLLEERRMMOOUURRRRIIOOLLAAGGOOIITTIIAASSOOSSA A
MÉXICO, D.F. 2009. E
ESSCCUUEELLAASSUUPPEERRIIOORRDDEEIINNGGEENNIIEERRÍÍAAMMEECCÁÁNNIICCAAYYEELLÉÉCCTTRRIICCAA
S
CARTA CESIÓN DE DERECHOS
En la Ciudad de México D.F. el día 25 del mes Junio del año 2009, el (la) que suscribe Ing. Gerardo Hernández Hernández alumno (a) del Programa de Maestría en Ciencias en Ingeniería Mecánica opción Diseño con número de registro A070218, adscrito a la Sección de Estudios de Posgrado e Investigación de la ESIME unidad Zacatenco, manifiesta que es autor (a) intelectual del presente trabajo de Tesis bajo la dirección de los Doctores Luis Héctor Hernández Gómez y Guillermo Urriolagoitia Sosa y cede los derechos del trabajo intituladoImplementación Numérica de Redes Neuronales Artificiales para el Análisis de Grietas en Placas, al Instituto Politécnico Nacional para su difusión, con fines académicos y de investigación.
Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos del trabajo sin el permiso expreso del autor y/o director del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección [email protected]. Si el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.
En este trabajo se realiza el cálculo analítico y por medio del método del elemento finito (MEF) de los factores de intensidad de esfuerzos (K) en placas. Para esto se varían las dimensiones del espécimen y la carga aplicada a este, a fin de crear una base de datos y entrenar una red artificial. Primeramente se obtiene una base de datos con el cálculo de K para 380 casos en los que se varía la longitud de la grieta, el ancho de espécimen, el espesor, y la carga que se le aplica. Esto se corrobora por medio de la obtención de los valores de K por medio del MEF con los mismos valores que se obtuvieron mediante el calculo analítico.
Los valores de K obtenidos del análisis mediante redes neuronales artificiales (RNA) análisis ordenados aleatoriamente y son utilizados para el entrenamiento de la RNA de retropropagación con los algoritmos Levenberg-Marquardt, BFGS Quasi-Newton, Retropropagación elástica, Gradiente conjugado, Fletcher-Reeves y la Secante de un paso. De lo anterior se identifica el algoritmo que implementando a una red de Retropropagación, proporciona los mejores resultados considerando como criterios el tiempo de cálculo y el menor error cuadrático medio. El algoritmo con mejores resultados en el entrenamiento se compara con los resultados de la base de datos analíticos y numéricos por medio del MEF.
Different methods have been tested in order to get solutions in problems of fracture mechanics, considering as criteria of an optimal solution, the fastest and precise one. In this way new methods of analysis have been proposed. In this work, stress intensity factor values (K) have been obtained by analytical calculus and by means of Finite Element Method (FEM), in order to get a data base to train a neural network. The first step was to get the values ok K for 380 cases in which geometrical variables of the specimen like crack size, wide and thickness were modified. The other case considers modifying the load applied to the specimen. This calculus was checked with data obtained through the analytical method.
Values of K obtained from the analysis by the way of artificial neural networks (ANN) analysis have been organized randomly and trained implementing the algorithms of Levenberg-Marquardt, BFGS Quasi-Newton, resilient backpropagation, conjugated gradient , Fletcher-Reeves y One step secant. The best algorithm with the vest results considering as criteria the less time and mean squared error have been compared with analytical data base and numerical calculus by means of FEM
Resumen i
Abstract ii
Índice iii
Índice de figuras iv
Índice de tablas v
Objetivo vi
Justificación vii
Introducción
Capitulo I. Conceptos y características de las redes neuronales artificiales
1.1. Orígenes de las redes neuronales artificiales 1
1.2. Historia de las redes neuronales 3
1.3. Modelo biológico de las redes neuronales 6
1.4. Fundamentos de las Redes Neuronales Artificiales 8
1.4.1. Características de una red neuronal artificial. 8
1.4.2. Funciones de excitación 12
1.4.3. Aprendizaje 13
1.4.4. Esquema general del funcionamiento de una red neuronal artificial 14
1.4.5. Arquitectura de una RNA 15
1.5. Ventajas y desventajas de las redes neuronales artificiales 18
1.6. El perceptrón 20
1.7. Algoritmos de entrenamiento 21
1.7.1. Algoritmos de entrenamiento comunes 21
1.7.2. El algoritmo de retropropagación 22
1.8. Aplicaciones Generales de las redes neuronales artificiales 25
1.8.1. Aplicaciones de las Redes Neuronales en Mecánica 25
1.9. Planteamiento del problema. 28
1.10. Sumario. 29
Capitulo 2. Conceptos teóricos de mecánica de la fractura.
2.1. La Mecánica de la Fractura 33
2.1.1 Antecedentes históricos de la Mecánica de la Fractura. 34
2.2. Análisis de fallas en Mecánica de la Fractura 39
2.2.1. Modos de carga y campo de esfuerzos resultante en la punta de la grieta 39
2.2.2 Teoría de falla de Griffith. 41
2.3. Factor de intensidad de esfuerzos k. 41
2.4.Evaluación numérica del factor de intensidad de esfuerzos por medio
del Método del Elemento Finito. 50
2.4.1 Ventajas y desventajas del programa computacional. 51
3.1. Calculo de los factores de intensidad de esfuerzos 56 3.1.1. Desarrollo analítico del factor de intensidad de esfuerzos en
placas metálicas para el modo I. 56
3.2. Desarrollo numérico del factor de intensidad de esfuerzos por medio
3.3. del método del elemento finito. 62
3.3.1. Descripción de los parámetros de diseño por medio del MEF 62
3.4. Implementación de la RNA. 70
3.3.1 Metodología de diseño de la RNA. 73
3.4. Procedimiento para el cálculo de redes neuronales en MATLAB. 75
3.5. Sumario. 77
Capítulo 4. Análisis de resultados.
4.1. Descripción de los resultados 78
4.2. Análisis de resultados con diferentes algoritmos 78
4.2.1 Entrenamiento de una RNA mediante el uso del algoritmo de
Levenberg-Marquardt. 78 4.2.2. Entrenamiento de la RNA mediante el uso del Algoritmo BFGS
Quasi-Newton. 83
4.2.3. Entrenamiento de la RNA mediante el uso del Algoritmo
Resilient Backpropagation o de retroporpagación elástica. 85
4.2.4. Entrenamiento de la RNA por medio del algoritmo scaled conjugate
gradient o de gradiente conjugado. 87
4.2.5. Entrenamiento de la RNS mediante el uso del algoritmo de
Fletcher-Reeves 89
4.2.6. Entrenamiento de la RNA mediante el algoritmo One Step Secant
Algorithm o de secante de un paso. 91
4.3. Análisis del error del cálculo analítico- numérico por medio del empleo
del Método del Elemento Finito. 93
4.4. Análisis del error del entrenamiento de una red Levenberg-Marquardt,
Método del elemento finito y cálculo analítico. 94
Discusiones 97
Conclusiones 98
Recomendaciones de trabajos futuros 100
Apéndices 101
INDICE DE FIGURAS
Capitulo 1
Fig. 1.1. Neurona biológica 3
Fig. 1.2. Unión sináptica de una neurona biológica. 8
Fig. 3. Esquema de una Neurona Artificial. 13
Fig. 1.4. Funciones de excitación o de transferencia 18
Fig. 1.5. Red Unicapa. 21
Fig. 1.6. Red Multicapa 25
Fig. 2.1. Esquema de los experimentos de Leonardo da Vinci sobre la
resistencia de hilos o lianas. 34
Fig.2.2.Trazas de excavación en las rocas hechas por los antiguos egipcios. 39
Fig.2.3. Modo de ruptura bajo flexión en una viga. (Galileo, 1638. Pp.133). 39
Fig.2.4. Barcos: a) Prestige fracturado y b) Flotilla de barcos Liberty. 46
Figura 2.5. Los tres modos básicos de aplicación de cargas: a) Modo I o
de apertura tensil, b) Modo II o de deslizamiento, c) Modo III o de desgarre. 50
Fig 2.6. Placa infinita con una discontinuidad elíptica en el centro de
dimensiones 2aX2b. 51
Fig. 2.7. Energía del sistema en condiciones de tensión uniforme. Datos de
Griffit para el vidrio. 52
Capitulo 3
Fig. 3.1. Grieta lateral modo de carga I. 56
Fig. 3.2. Dimensionamiento del espécimen. 58
Figura 3.3. Valores de K variando el tamaño de grieta. 62
Fig. 3.4. Valores de K variando el ancho del espécimen. 65
Fig. 3.5. Valores de K variando el espesor del espécimen. 69
Fig. 3.6. Valores de K variando el esfuerzo. 70
Fig. 3.7. Tipo de elemento PLANE185 utilizado para el análisis
(Tutorial ANSYS). 71
Fig. 3.8. Condiciones de simetría del espécimen. 71
Fig. 3.9. Calculo de K por medio del MEF para el caso de variación del
Tamaño de grieta. 72
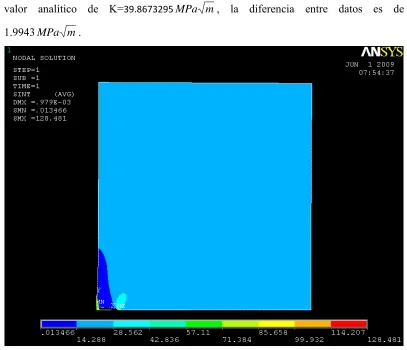
Fig. 3.10. Intensidad de esfuerzos en la placa de 5mm de tamaño de grieta. 73
Fig. 3.11. Cálculo de K por medio del MEF variando el ancho del espécimen. 73
Fig. 3.12. Intensidad de esfuerzos en una placa de 120mm de ancho. 74
Fig. 3.13. Cálculo de K por medio del MEF variando el espesor. 75
Fig. 3.14. Intensidad de esfuerzos en una placa de 10mm de espesor. 76
Fig. 3.15. Cálculo de K por medio del MEF variando el esfuerzo. 76
Fig. 3.16. Intensidad de esfuerzos en una placa con un esfuerzo de 19MPa. 77
Capitulo 4
Fig. 4. 2.1.1. Cuadro de entrenamiento de la RNA Levenberg-Marquaerd 79
con 200 épocas.
Fig. 4.2.1.2. Desempeño de la RNA Levenberg-Marquaerd con 200 épocas. 79
Fig. 4.2.1.3 Estado del entrenamiento de la de la RNA 79
Levenberg-Marquaerd con 200 épocas. 80
Fig. 4. 2.1.4. Cuadro de entrenamiento de la RNA Levenberg-Marquaerd
con 2000 épocas. 82
Fig. 4.2.1.5. Desempeño de la RNA Levenberg-Marquaerd con 2000 épocas. 84
Fig. 4.2.2.1. Entrenamiento de la red neuronal BFGS Quasi-Newton. 88
Fig. 4.2.2.2. Desempeño la red neuronal BFGS Quasi-Newton. 89
Fig. 4.2.2.3. Estado del entrenamiento de la red neuronal BFGS Quasi-Newton. 90
Fig. 4.2.2.4. Regresión de datos de la red neuronal BFGS Quasi-Newton. 90
Fig. 4.2.3.1. Entrenamiento de la red neuronal de retropropagación elástica. 90
Fig. 4.2.3.2. Desempeño la red neuronal de retropropagación elástica. 91
Fig. 4.2.4.1. Entrenamiento de la red neuronal de gradiente conjugado. 91
Fig. 4.2.4.2. Desempeño la red neuronal de gradiente conjugado. 91
Fig. 4.2.4.3. Estado del entrenamiento de la red neuronal de gradiente conjugado.92
Fig. 4.2.4.4. Regresión de datos de la red neuronal de gradiente conjugado. 92
Fig. 4.2.5.1. Entrenamiento de la red neuronal de Fletcher-Reeves. 92
Fig. 4.2.5.2. Desempeño la red neuronal de Fletcher-Reeves. 93
Fig. 4.2.5.3. Estado del entrenamiento de la red neuronal de Fletcher-Reeves 93
Fig. 4.2.5.4. Regresión de datos de la red neuronal de Fletcher-Reeves 93
Fig. 4.2.6.1. Entrenamiento de la red neuronal de secante de un paso. 93
Fig. 4.2.6.2. Desempeño la red neuronal de secante de un paso. 94
Fig. 4.2.6.3. Estado del entrenamiento de la red neuronal de secante de un paso 94
Fig. 4.2.6.4. Regresión de datos de la red neuronal de secante de un paso 94
Fig. 4.3.1. Calculo analítico- numérico por medio del método del Elemento Finito.95 Fig. 4.4.1. Entrenamiento de la RNA Levenberg-Marquardt datos analíticos
aleatorios. 95
Fig 4.4.2. Validación de la RNA Levenberg-Marquardt 96
Fig 4.4.3. Datos de gradiente y validación de la RNA Levenberg-Marquardt 97
Fig 4.4.4. Regresiones lineales de los datos. 98
INDICE DE TABLAS
Capitulo 1
Tabla 1. Algunos eventos significativos que han marcado la historia de las RNA.
(Gori, 2003) 12
Capitulo 2
Tabla 1. Describe las funciones geométricas para el modo de carga 1 aplicado a
distintas formas de grieta en placas (Rice, 1972 en Viveros, 2008) 35
JUSTIFICACIÓN:
En distintas Ciencias, así como en ciertas disciplinas de la Física, tal es el caso de la Ingeniería Mecánica, se busca el empleo de diversos constructos teóricos que sirvan de apoyo para representar fenómenos de la realidad. En esta búsqueda, se han desarrollado distintos modelos que en ocasiones se basan en el funcionamiento del cuerpo humano. Debido a la complejidad, perfección y buen funcionamiento que este ha mostrado para la realización de distintas tareas en comparación incluso de sistemas ingenieriles avanzados. Los sistemas expertos tal como se conocen, son una rama de la inteligencia artificial, de los cuales se destacan la lógica difusa y el modelo de Redes Neuronales Artificiales (RNA), el cual se basa en una analogía del funcionamiento del sistema nervioso de algunas especies vivas tales como los seres humanos, para la implementación en aplicaciones de ingeniería.
Las redes Neuronales artificiales son un sistema de interconexiones neuronales que forman una red, la cual está compuesta de neuronas que proporcionan la entrada de datos que a través de las interconexiones emiten un salida y esta a su vez está determinada por tres funciones: una función de propagación, una función de activación y una función de transferencia. De esta forma la red adquiere información y proporciona un dato a la salida teniendo la posibilidad de crecer la red en información por lo que se describe análogamente a los procesos humanos de aprendizaje. Debido a las características las Redes Neuronales Artificiales se han utilizado para intentar predecir el comportamiento de diversos sistemas. En este caso resulta de gran interés por sus implicaciones en diversas ramas de la ingeniería y la industria la implementación de Redes Neuronales Artificiales para la predicción del comportamiento de grieta con relación a distintas variables que se introducen al modelo.
OBJETIVO:
El objetivo principal de este trabajo es analizar el comportamiento de grietas en materiales mediante la implementación de Redes Neuronales Artificiales. Para este análisis se modifican; las ecuaciones de carga, las dimensiones del espécimen que se analiza y el tamaño de grieta inducido. A su vez se utilizan los valores encontrados para el análisis del inicio de propagación de una grieta mediante el entrenamiento de una red neuronal artificial.
Para poder concretar satisfactoriamente el objetivo general de esta tesis, se plantearon los siguientes objetivos particulares, los cuales se presentan a continuación:
• Realizar el análisis numérico del comportamiento del inicio de propagación de una
grieta en placas por medio del Método del Elemento Finito (FEM) para la obtención de los factores de intensidad de esfuerzo critico en distintos casos.
• Conocer los aspectos de mecánica de la fractura aplicados al análisis de
comportamiento de grieta, así como los diferentes enfoques teóricos.
• Entender y aprender la aplicación de redes neuronales artificiales aplicadas a
problemas de mecánica de la fractura.
• Implementar las Redes Neuronales Artificiales para la solución de problemas del
inicio de propagación de una grieta.
• Comparar los datos de simulaciones numéricas mediante programas de diseño y los
obtenidos mediante el cálculo matemático.
CAPÍTULO
1
Conceptos y Características de las Redes Neuronales
Artificiales
1.1. Orígenes de las Redes Neuronales Artificiales.
El estudio mediante redes neuronales ha cobrado importancia a través de los años debido a
su diversa gama de aplicaciones y las ventajas que este paradigma teórico aporta con
relación a otros métodos y técnicas en la resolución de algunos problemas en distintas
disciplinas del conocimiento. El modelo de redes neuronales artificiales es análogo al
funcionamiento del sistema nervioso de algunos organismos, asociandose principalmente
en el de los seres humanos. Dicho sistema, al igual que distintos sistemas y modos de
funcionamiento de los organismos vivos, ha servido de ejemplar para la formación de
nuevos conceptos, teorías y paradigmas con aplicaciones en distintas áreas, con la finalidad
de desarrollar nuevas tecnologías. Lo anterior es debido a la eficacia de los sistemas
biológicos en la resolución de algunas tareas. Este hecho no es fortuito, ya que, los
diversos organismos biológicos que conocemos son producto de la evolución de millones
de años.
El modelo de Redes neuronales parte de una corriente filosófica llamada conexionismo. A
su vez las RNA surgen de los estudios con relación a la anatomía y funcionamiento del
cerebro y el análisis explicativo de la conducta de los organismos, por tal motivo tienen
gran parte de sus orígenes dentro de la psicología cognitiva y la Biología. A diferencia de
conexionismo contempla el ambiente biológico por lo cual se introducen desde la
perspectiva conexionista de las redes neuronales conceptos biológicos tales como neurona,
sinapsis, axón, entre otros. Campanario (2004), argumenta que este enfoque es
multidisciplinario, con base al uso de redes neuronales mantiene relaciones con campos tan
aparentemente ajenos a la didáctica de las ciencias como son las matemáticas, la
inteligencia artificial, la epistemología, la lingüística, la informática, la neurobiología, entre
otros.
A través de los años, el hombre ha intentado crear máquinas y procesos que imiten las
funciones del cuerpo humano, así, las primeras explicaciones en torno al funcionamiento
del cerebro humano fueron dadas por filósofos griegos tales como platón, y en la actualidad
se equiparan con en el modelo de Von Newman. Es de aquí que se introducen en la
psicología cognitiva conceptos como almacenamiento y procesamiento de información
propia de dicho modelo.
Desde un punto de vista de ingeniería, así como de las distintas disciplinas, el modelo de
Redes Neuronales es utilizado para predecir no solo comportamientos de organismos
biológicos, sino de diversos sistemas que abarcan una gran gama de áreas del
conocimiento, es por ello que esta perspectiva traída de la biología y la psicología resulta
tan atractiva como modelo teórico por sus características y aplicaciones.
El interés en torno a la exploración del funcionamiento del cerebro surge desde épocas
ancestrales, siendo la génesis de las investigaciones en torno a esta área las realizadas por
los antiguos griegos. Los anteriores estudios por parte de dicha cultura, son la base para el
establecimiento de diversos campos de investigación en torno a disciplinas neurocientíficas,
psicológicas y de ingeniería en la actualidad. Diversos modelos de análisis del cerebro,
tales como los conexionistas mediante redes neuronales artificiales, han permitido el
análisis del comportamiento de diversos sistemas, no solo en torno al funcionamiento del
sistema nervioso de los organismos, sino también aplicando la metáfora de la computadora
fundamentada en el modelo de Von Newman. Se extrapola esto al análisis del
comportamiento y funcionamiento de una gran variedad de sistemas en diversas áreas del
entre otras. En el ámbito de la ingeniería, las redes neuronales artificiales surgen como una
propuesta para la resolución de distintos problemas con la intención de desempeñar un sin
fin de tareas que comúnmente realiza el ser humano y requieren de lo que ordinariamente
llamamos inteligencia. Este interés por crear máquinas, aparatos y sistemas capaces de
suplir y facilitar algunos trabajos realizados por el ser humano se observa fehacientemente
con la invención de la cuña, la palanca. La polea, la rueda y posteriormente la creación de
los motores de vapor, los telares, entre otros más sofisticados en la actualidad. De lo
anterior se explica el profundo interés en la investigación aplicada en torno a las redes
neuronales artificiales, y se justifica la importancia de la indagación en torno a sus orígenes.
1.2. Historia de las redes neuronales.
Las primeras explicaciones teóricas sobre el cerebro y el pensamiento ya fueron dadas por
algunos antiguos filósofos griegos, como Platón (427-347 a.C.) y Aristóteles (384-422 a.
C.). Las mismas ideas sobre el pensamiento mental también las mantuvo Descartes
(1596-1650). La clase de las llamadas máquinas cibernéticas, a la cual pertenece la
computación neuronal, tiene más historia de lo que generalmente se cree: Herón el
Alejandrino construyo un autómata hidráulico sobre el 100 a.C. (Hilera y Martínez, 2000).
Lo anterior, específicamente la creación del autómata al cual se hace referencia, resulta
relevante debido a que el aquí se observan los primeros intentos de reproducir acciones que
comúnmente realiza el ser humano.
Posteriormente se conoce de los estudios del cerebro realizados por Alan Turing en 1936,
los cuales conforman as primeras representaciones del funcionamiento del cerebro con una
perspectiva computacional. Sin embargo, son el neurofisiólogo McCulloch y el
matemático Walter Pitts quienes en 1943 describen los principales fundamentos de lo que
se conoce como computación neuronal (op cit). Por otra parte, Donald Hebb en 1949,
fisiología y la psicología. (Hebb, 1949). En el capítulo 4, de su libro, se da, por primera
vez, una metodología para la modificación de las sinapsis, es decir, una regla de
aprendizaje fisiológica. Además propone que la conectividad del cerebro cambia
continuamente conforme un organismo aprende cosas nuevas, creándose asociaciones
neuronales con estos cambios (Soria y Blanco, 2001).
En el año de 1957, Frank Rosenblatt desarrolla lo que se conoce como perceptrón y se
considera la base más simple de las redes neuronales siendo usado hoy en día para el
reconocimiento de patrones. La característica de este modelo, es que es capaz de reconocer
modelos similares a los cuales ha sido entrenado previamente, sin embargo es de conocerse
su incapacidad para resolver el problema de la función OR-exclusiva y su limitación en
general para clasificar clases no separables linealmente.
Son bastos los estudios que se reportan en la literatura en torno a las Redes Neuronales
artificiales, sin embargo, resulta importante destacar el desarrollo del modelo ADELINE en
1959 por parte de Bernard Widrow y Marcial Hoff, ya que de aquí se conforma la primera
red neuronal aplicada a un problema real, siendo usado de forma comercial por décadas
(Widrow en Hilera, 2001).
En el año de 1954, Misnky escribió su tesis doctoral en la universidad de Princeton titulada
“teoría de los sistemas Analógicos-Neurales de reforzamiento y sus aplicaciones al problema del modelo cerebral”. Posteriormente en 1961 se publicó un artículo “Pasos
hacia la inteligencia artificial” y más tarde, el libro titulado “perceptrones” de Misnky y
Papert, generó un sin número de criticas ya que ellos realizaban un crítica en torno al
funcionamiento y la aplicabilidad de los perceptrones. Este hecho limitó de forma drástica
el avance de las investigaciones en el campo de las RNA, de 1969 hasta el año de 1982 con
los trabajos de J. Hopfield, en donde él, desarrolla la idea del uso de una función de
energía para comprender la dinámica de una red neuronal recurrente con uniones sinápticas
simétricas. En este primer trabajo, Hopfield sólo permite salidas bipolares (0 ó 1), (Soria y
Blanco, 2001). No obstante lo anterior, autores como Kohenen, Anderson y Stephen
posterior a la publicación de Minsky y Papert, siendo Grossberg quien estableció el
principio de la auto-organización aplicado a las redes neuronales y de esta forma surgió la
teoría de la resonancia adaptativa TRA o mejor conocida por sus siglas en ingles ART
(Adaptative Resonance Theory).
I ERA EVENTOS SIGNIFICATIVOS
1943 McCulloch y Pitts, Formalizacion de la neurona artificial
1949 D. Hebb y el apredizaje por autoorganización
1956
"Proyecto de investigación Darmouth Sommer de IA" (Minsky, McCarty,
Rochester, Shannon)
1960 Widrow: ADALINE
1962 El perceptron de Rosenbatt
1969 Perceptrones. Minsky & Papert.
70's
Los asociadores de Anderson, modelos para el aprendizaje sin supervisión de
Kohonen, Estudios de Grossberg
II ERA
1982 Redes de Hopfield: Memoria asociativa y solución de problemas
1986 PDP Y difusión de la Retropropagación
1987 La primera conferencia significativa de la IEEE en San Diego
1989
Los Chips neurales se introducen en el mercado: Sistemas Neurales Análogos
VLSI (very large scale integrated) por sus siglas en ingles
1990 J. Pollack y las redes neuronales que elaboran estructuras dadas
1994 Primera conferencia mundial sobre inteligencia computacional (Orlando)
1994 Surgió el proyecto neuroCOLT (Teoria computacional de aprendizaje)
[image:18.612.90.536.183.589.2]2001 La IEEE aprueba la creacion de la "Sociedad de redes neuronales"
Tabla 1. Algunos eventos significativos que han marcado la historia de las RNA.
(Gori, 2003)
En años recientes, el impacto de las redes neuronales, se ha manifestado en la gran variedad
de aplicaciones debido a su versatilidad y eficacia en la resolución de problemas, no
que permitan mejorar este modelo. Actualmente se realiza investigación por medio de la
implementación de algoritmos genéticos, así como el uso de los modelos de Control
difuso, algoritmos evolutivos y redes estocásticas, entre otros en la resolución de problemas
en conjunto con las RNA.
1.3 Modelo biológico de las redes neuronales
Las redes neuronales artificiales son análogas a la fisiología neuronal de cuerpo humano,
es decir, se toma como modelo el funcionamiento de parte del sistema nervioso central,
tomándolo como analogía para emular su funcionamiento mediante técnicas
computacionales y esto a su vez permita dar solución a una gran gama de problemas, con
las ventajas y desventajas que estas implican.
Fig. 1.1. Neurona biológica
De la figura anterior, se observan los elementos que componen a una neurona biológica,
tales como el núcleo o cuerpo de la neurona, también llamado soma, y una serie de
terminales que parten de este, vistas como ramificaciones llamadas dendritas. Existe una
conexión entre las dendritas y el teledrón llamada axón. El axón está recubierto por una
Las entradas exitatorias que llegan a la célula, reducen la diferencia de potencial que
existe entre los dos lados de la membrana celular. La despolarización resultante en el
montículo del axón altera la permeabilidad de la membrana celular a efectos de los iones
de sodio positivos, que penetran la célula.
Las fibras nerviosas en si son malos conductores. La transmisión de potencial de acción a
lo largo del axón es el resultado de una serie de despolarizaciones que tiene lugar en los
nodos de ranvier. Cuando uno de los nodos se despolariza, se desencadena la
despolarización del siguiente nodo. El potencial de acción viaja a lo largo de la fibra en
forma discontinua, de un nodo a otro. Una vez que el potencial de acción ha pasado por un
cierto punto, este no puede volver a ser excitado durante un milisegundo aproximadamente,
que es el tiempo que tarda en volver a su potencial de reposo o estado basal. Este periodo
refractario limita la frecuencia de transmisión de los impulsos nerviosos a unos 1000 por
[image:20.612.118.496.370.631.2]segundo (Freeman y Skapura, 1993)
Fig. 1.2. Unión sináptica de una neurona biológica.
La sinapsis es la unión que se establece entre dos neuronales y mediante una serie de
célula influya en la actividad que realizan otras neuronas. El dogma recibido de la teoría de
redes neuronales dice que las sinápsis varían en fuerza. Esto es lo que permite las detalladas
interacciones entre varias neuronas y son la clave de la naturaleza de los cómputos de las
redes neuronales (Anderson, 2007). Una característica de las redes neuronales que se toma
para sus aplicaciones tecnológicas es su funcionamiento en paralelo, es decir que pueden
existir series de neuronas interconectadas unas con otras y trabajando al mismo tiempo.
Esta característica, a pesar de las limitaciones que tienen en tiempo de transmisión por la
frecuencia ya descrita, se compensa por su capacidad de funcionamiento en paralelo, por lo
cual frente a otras aplicaciones actuales por medio de métodos numéricos, reducen el
tiempo en algunas aplicaciones.
De acuerdo a (Izarrueta y Saavedra, 2008), del modelo biológico de redes neuronales, se
hace hincapié en dos componentes de suma importancia:
1. El impulso que llega a la sinapsis y el que sale de ella, los cuales no son iguales, ya
el tipo de salida depende del número de neurotransmisores que se ve modificado por
medio del proceso de aprendizaje, así se modifica este y la información almacenada
se refuerza o se debilita.
2. Las entradas de todas las dendritas se suman en el soma o cuerpo de la neurona. Si
las entradas sobrepasan un umbral, un impulso se trasmitirá a lo largo del axón de lo
contrario no se realiza esta operación.
1.4 Fundamentos de las Redes Neuronales Artificiales.
1.4.1. Características de una red neuronal artificial.
Es conveniente comenzar definido lo que es una RNA, por lo que Haykin (1999) refiere
la capacidad de almacenar conocimiento experimental y mantenerlo disponible para su
uso. Este se asemeja al cerebro humano en dos aspectos:
• El conocimiento de la red se adquiere mediante un proceso de aprendizaje.
• Las conexiones interneuronales llamadas pesos sinápticos son usados para
almacenar información.
Por otra parte, Müller et. al (1995), definen Un modelo de redes neuronales como
algoritmos para tareas cognitivas, tales como el aprendizaje y la optimización, las cuales en
un sentido vago se apoyan en conceptos derivados de la investigación en torno a la
naturaleza del cerebro.
De lo anterior, se puede decir que existe una serie de características de las Redes
Neuronales artificiales que las colocan en ventaja en algunas aplicaciones con relación a
otros modelos teóricos. Es importante destacar que el modelo neuronal biológico se toma
como base para la creación de redes neuronales artificiales, sin embargo, no es el propósito
reproducirlo de forma exacta, más bien extraer las características de mayor relevancia para
su aplicación en la resolución de problemas.
Las redes Neuronales artificiales son sistemas computacionales dinámicos-no lineales que
constan de un gran número de elementos interconectados y organizados por niveles, entre
ellos los nodos o neuronas, capaces de procesar información recabada por medio de
entradas dinámicas externas. En la actualidad existen varios modelos de redes neuronales,
sin embargo su aplicación se define en función del problema a resolver.
McCulloch y Pitts (1943) dieron a conocer un modelo simple de una neurona, el cual
resulta el elemento básico del procesamiento de una Red Neuronal Artificial, así también
describieron el funcionamiento de las redes neuronales por medio de compuertas lógicas.
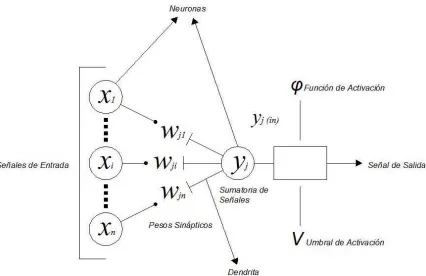
En la Figura 3, Se muestra la analogía de una red neuronal biológica con una red neuronal
artificial en donde X1, Xi,Xn yYj son las neuronas y las líneas que unen a X1,..Xn con Yj
Fig. 3. Esquema de una Neurona Artificial.
Las neuronas X1, Xi hasta Xn, son señales de entrada, las cuales envían
información con valores numéricos y a su vez, se encuentran interconectadas con la
neurona Yj, las cuales son representadas por el vector de señales entradas:
(1.1)
Cada señal de entrada Xi es multiplicada por un valor Wji conocido como peso
sináptico el cual define el grado de importancia o prioridad de la información transmitida a
las dendritas de Yj. El primer subíndice de W denota hacia donde es dirigida la
información proveniente de la neurona Xi, y a su vez el segundo subíndice hace referencia
al origen de la información. Los pesos sinápticos Wji pudiendo ser exhitatorios (positivos)
(1.2)
Al multiplicar las entradas por sus respectivos pesos y tomando en cuenta que como
una neurona biológica, las entradas se suman en el soma o cuerpo de la neurona, la
entrada total de la neurona Yj (in) queda representada de la siguiente forma:
(1.3)
En la cual en subíndice (in) representa (input) o entrada. Para que la neurona se
active, es necesario que supere un umbral de activación V y a su vez sea excitada mediante
la aplicación de una función de activación, la cual será aplicado sobre Yj(in). Este puede
ser por ejemplo una señal sigmoide, escalón, hiperbólica tangente, entre muchas otras, por
lo que la señal de salida resultante es:
(1.4)
Así mismo, las funciones de activación pueden ser lineales o no lineales, adoptando
de esta forma las neuronas de acuerdo a su función de activación el nombre de neuronas
lineales o no lineales y representándose las primeras esquemáticamente por un cuadrado y
las segundas por un círculo. En la siguiente gráfica se muestran algunas de las principales
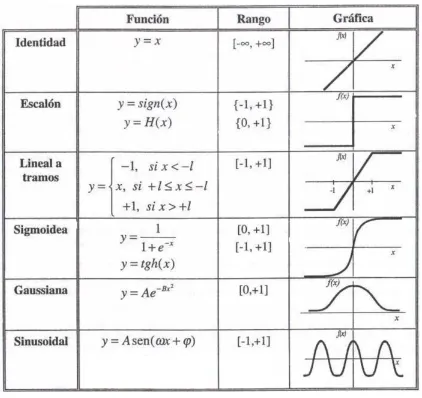
1.4.2. Funciones de excitación
Como se mencionó, se requiere de una función de activación para habilitar la red neuronal,
Esta puede ser lineal o no lineal y su elección del tipo de función depende del caso a
resolver y del tipo de red. En la siguiente figura se muestran algunas funciones de
[image:25.612.104.526.264.662.2]activación comúnmente utilizadas.
1.4.3. Aprendizaje.
Castillo et al (1999) hacen mención que una de las principales características de las RNA
es su capacidad de aprendizaje a partir de unos datos, y de esta forma una vez que se ha
definido la arquitectura de la red, los pesos de las conexiones son ajustados para codificar
la información obtenida de un conjunto de datos de entrenamiento. De esta forma, los
diferentes métodos de aprendizaje se pueden clasificar en dos categorías dependiendo del
tipo de información disponible (op cit):
• Aprendizaje Supervisado, en el cual los patrones de aprendizaje son formados por
parejas de datos {(Ap;Bp), p=1,….n}, este consta de un vector de entrada A y sus
correspondientes salidas B. En este tipo de redes, el error se reduce mediante los
datos a la salida calculados por otra red y de esta forma redefiniendo los pesos. En
este tipo de aprendizaje, el patrón de salida es un dato conocido, con lo cual se
verifica constantemente la respuesta a la salida.
• Aprendizaje no supervisado, en este tipo de redes, la red debe descubrir por si misma patrones y categorías ya que los datos son presentados a la red sin
información externa. Es considerado dentro de las técnicas autorganizativas o
automáticas con la finalidad de descubrir las estructuras de datos. La red debe ser
capaz de reajustar los pesos de la red de manera que se encuentre alguna
configuración presente o resultado coherente al problema. Esto mediante una serie
de ciclos de entrenamiento llamados épocas. Algunos ejemplos de este tipo de
aprendizaje son:
• Aprendizaje Hebbiano: El cual consiste en la modificación de los valores de los
pesos de la red, de acuerdo a algún criterio de correlación entre las actividades de
las neuronas.
• Aprendizaje competitivo: en el cual las neuronas son conectadas con pesos
• Representación de características: usualmente conocido como (feature mapping) el cual consiste en la ordenación geométrica del peso de los vectores
Otra característica de los datos de aprendizaje no supervisado es que puede contener
valores de entrada y salida, sin conocer la correspondencia entre las salidas y los datos
entrantes.
Lo anterior, es la descripción de una neuronal artificial. Existen muchas modificaciones al
modelo neuronal básico, del cual se plantea al perceptrón como base, los cuales se
describen más adelante, también es importante señalar que para el modelo neuronal se
requiere de un entrenamiento a través de diversos procesos como el aprendizaje
supervisado, la regla de Hebbs o los procedimientos de aprendizaje entre otros.
La regla de aprendizaje de Hebbs consiste en la elección de los pesos sinápticos Wji se
elijen en función de un patrón memorizado σi. Cada patrón memorizado conforma una
configuración estable.
1.4.4. Esquema general del funcionamiento de una red neuronal artificial.
De acuerdo a Pistolesi (1999), Las redes neuronales consisten de un sistema de n neuronas,
cuya información es o no trascendente mediante la prioridad definida por los pesos
sinápticos. La dinámica general consta de tres fases:
Una señal de activación, la cual actualiza los estados de las neuronas y permite de esta
forma el cálculo. Dado un estado de una neurona i y la entrada de estimulación de la
neurona el estado siguiente resultante es:
(1.5)
Una regla de aprendizaje, la cual modifica los pesos de las conexiones y así permite llevar
acabo el cálculo. Dado el peso sináptico Wji que reforzará o inhibirá aquel peso,
resultando:
(1.6)
1.4.5. Arquitectura de una RNA.
Una red neuronal artificial puede concebirse desde un punto de vista matemático como un
grafo dirigido y ponderado, donde los nodos representan las neuronas y las líneas que las
unen entre si son las conexiones sinápticas. Las arquitecturas pueden definirse por el
número de capas:
• Redes monocapas, son aquellas de configuración más sencilla ya que están formadas únicamente por una capa de neuronas que proporcionan las entradas a la
red y una capa de neuronas que generan los datos a la salida. Debido a que la capa
de entrada no realiza ningún cálculo, más bien solo alimenta a la red con la señales
de entrada, esta capa no se cuenta. Es por ello que el nombre es redes monocapa.
Este tipo de red es conveniente cuando se trabaja con una gran cantidad de datos, ya
que surge la necesidad de agruparlos de acuerdo a sus similitudes de
comportamiento. Cada capa constituye un vector de neurona y las neuronas de
salida pueden ser lineales o no lineales. En la siguiente figura se muestra un
Fig. 1.5. Red Unicapa.
• Las redes neuronales multicapa, tienen un mayor número de datos de entrada y de
neuronas. Tienen capas ocultas intermedias entre las entradas y las salidas y son
mayormente utilizadas para la resolución de problemas más complejos. En este tipo
de redes, las capas ocultas contienen datos lineales o no lineales. Lo anterior se
demuestra mediante la construcción de una red multicapa con capas ocultas lineales,
seria equivalente a una red unicapa. Esta característica ha sido aprovechada para el
Scale Integrated) VLSI, por sus siglas en inglés. En la siguiente figura se muestra un
ejemplo de una red multicapa.
Fig. 1.6. Red Multicapa
Por su tipo de conexión se arquitectura se clasifican como:
• Redes no recurrentes, en las cuales la señal se produce únicamente en un sentido. Estas estructuras no tienen memoria y puesto que solo reciben información en un
sentido no es posible realimentarlas. Esto hace referencia a un sistema de control de
lazo abierto en el cual no existe señal de retroalimentación.
• Redes neuronales recurrentes, las cuales tiene lazos de realimentación. Lo anterior
es análogo a un sistema de control de lazo cerrado en el cual la señal de salida
de diferentes capas o entre una misma neurona. Este tipo de configuración las hace
adecuadas para estudios no lineales.
Por su tipo de conexión su arquitectura se define como:
• Redes neuronales totalmente conectadas. Cada una de las neuronas de una capa se encuentran conectadas con las neuronas de la capa siguiente (redes no recurrentes) o
con las de la capa anterior (redes recurrentes).
• Redes parcialmente conectadas. Estas conexiones pueden ser en diferentes
configuraciones siendo en paralelo o jerárquicas. En las redes jerárquicas se define
la importancia de las neuronas formando redes subordinadas o subredes.
1.5 Ventajas y limitaciones de las redes neuronales artificiales.
Si bien la redes neuronales son una buena alternativa para la solución de muchos problemas
también tienen sus limitaciones, no obstante lo anterior, se ha buscado la forma de
perfeccionarlas a través de diferentes modelos y adaptaciones. Se observan actualmente
trabajos mediante Redes neuronales Artificiales combinadas con algoritmos genéticos,
algoritmos evolutivos y mediante la optimización de control difuso también conocido como
ANFIS.
Dependiendo del tipo de aplicación se determina la viabilidad de la aplicación de las
RNA, selecciona el tipo de red a utilizar y las implementaciones apropiadas. De lo anterior
se destacan a continuación algunas de las ventajas de trabajar con Redes Neuronales:
• Alta tolerancia al ruido. Significa que resultan muy flexibles con relación a datos
complejos, y datos faltantes.
• Capacidad de trabajo en paralelo. Las dota de mayor rapidez en la resolución una
gran gama de problemas con relación a métodos computacionales convencionales.
• Tolerancia al error. Permite que por medio de una retroalimentación de la red neuronal, se realicen procedimientos iterativos que actualizan las secuencias y los
pesos de la red, posibilitándola de un aprendizaje en tiempo real. También cabe
destacar que la red puede seguir respondiendo de forma relativamente aceptable
• Adaptabilidad. Debido a que la red neuronal tiene la capacidad de modificar y corregir algunos de sus parámetros tales como sus entradas o autoajustarse en
presencia de ruido, sin embargo, es necesario destacar que su capacidad de
adaptación no debe ser exagerada, ya que esto crearía un sistema inestable, el cual
respondería a pequeños cambios o perturbaciones.
• Posibilidad de trabajo en tiempo real. Mediante lo cual emulan actividades de los
sistemas biológicos a través de programación o el uso de componentes de silicio.
Por otra parte, Muñoz (1996) describe algunas de las características por las que las
RNA suelen ser útiles:
• No linealidad. Las neuronas generalmente son elementos de proceso no lineales, quedando esta propiedad de no linealidad distribuida a lo largo de toda la red. Lo
anterior resulta útil para la resolución de problemas no lineales tales como el
reconocimiento de patrones de voz, sin embargo también complica el análisis por
medio de métodos lineales ya establecidos.
• Respuesta evidencial. La red puede otorgar información sobre la fiabilidad de una
estimación. De esta forma puede rechazar o aceptar valores de entrada completando
el proceso de estimación.
• Tolerancia frente a fallos. La red puede seguir respondiendo en el caso de que parte de su estructura este dañada. Esto por el tratamiento distribuido de la información, y
la redundancia implícita de la red.
• Realización en VLSI. Permite construir estructuras altamente complejas mediante la
utilización de tecnología (Very Large Scale integration). Esto se logra por las
características de procesamiento en paralelo de una red neuronal, lo cual permite la
resolución de problemas complejos.
Algunas de las desventajas que se refieren del uso de las redes neuronales son las siguientes
• Es difícil conocer el contenido de las capas ocultas, por lo cual la información es una caja negra para el diseñador. De esta forma no existen algoritmos que describan
el comportamiento de la red.
• La extrapolación de de soluciones que se encuentran fuera del dominio de la red.
• Si el problema a resolver es altamente complejo, el diseñador debe realizar una
delimitación muy precisa del problema, lo cual puede resultar en una gran tarea.
Adicionalmente a lo anterior, cabe destacar que debe delimitarse el problema con
precisión, así también el número de épocas o ciclos de entrenamiento para no realizar un
sobre-entrenamiento y obtener resultados vagos e imprecisos.
1.6. El perceptrón.
Hagan (1996), refiere que Frank Rosemblatt en 1950 junto con otros investigadores,
desarrollaron una clase de redes neuronales llamadas perceptrones, cuyas neuronas eran
similares a las de McCulloch y Pitts. El aspecto trascendente con el que contribuyó
Roseeblatt fue al introducir la regla de entrenamiento del perceptrón para los problemas de
reconocimiento de patrones, observando que esta regla siempre converge hacia los valores
de los pesos correctos, la cual aprende de los errores.
El modelo del perceptrón, es un modelo neuronal básico, está determinado principalmente
por tres funciones, las cuales son, activación, propagación y transferencia. Estas regulan la
forma de operación de la red y mediante la función de transferencia se da una
retroalimentación, la cual posibilita el aprendizaje mediante entrenamiento.
1.7. Algoritmos de entrenamiento
1.7.1. Algoritmos de entrenamiento comunes.
Este tipo de redes generalmente se organizan en diferentes capas, de esta forma cada
neurona de una capa es capaz de recibir una entrada de las neuronas de capas previas.
Como ya se ha descrito. Los perceptores son las estructuras más simples de una sola capa.
Algunos de los algoritmos de aprendizaje más comunes se describen a continuación:
• Aprendizaje Hebbiano: los pesos sinápticos son elegidos de forma aleatoria, utilizando los patrones uno a uno y de esta forma se modifican los pesos de acuerdo
a la correlación entre los valores de entrada y de salida.
(1.7)
El paramento “n” representa el índice de aprendizaje que indica el cambio de los pesos
sinápticos.
• Método del descenso de gradiente, en el cual también se eligen los pesos sinápticos de forma aleatoria, sin embargo la finalidad de este método es minimizar la suma de
los cuadrados de los errores por medio de la variación de los pesos, de esta forma el
error se encuentra determinado por la siguiente expresión:
(1.8)
(1.9)
En donde Bpi es la activación lineal de la neurona bpi es decir bpi=f(Bpi). “n” Representa
el índice de aprendizaje.
Si se describe un caso lineal de la forma f(x)=x, la fórmula de aprendizaje anterior se
modifica y se reduce:
(1.10)
1.7.2 El algoritmo de retropropagación
Castillo et al (1999) realizan una descripción de la red de retropropagación, en donde,
suponiendo conjuntos de entrada {ap1,…apn} con las salidas correspondientes a estos de la
forma {bp1,….bpn}, donde p=1 como patrones de entrenamiento de un perceptrón simple se
tiene la función que describe el error total:
(1.11)
Este algoritmo de retropropagación se apoya en la idea del descenso del gradiente por
medio del uso de la regla delta:
(1.12)
Donde n es el parámetro de aprendizaje relacionado con el índice de pesos modificables. El
algoritmo de Retropropagación de Rumelhart et al (1986), permite dar solución a la
problemática de actualizar iterativamente los pesos ya que no resulta igual de simple que en
el caso del perceptrón.
Primeramente la entrada de un patrón ap se propaga hacia adelante mediante la obtención
de los valores hp de las capas ocultas y las salidas bp. De esta forma los valores obtenidos
son utilizados para actualizar los pesos sinápticos Wik y así propagar hacia atrás los errores
anteriores:
(1.13)
Bpi=f(Bpi), y es la enésima salida de la red obtenida mediante la retropropagación hacia
(1.14)
Ya que los pesos han sido actualizados, el valor resultante junto con el valor a la entrada y
los de las neuronas de las capas ocultas, se utilizan para modificar los pesos de la capa
oculta:
(1.15)
De los primeros términos, se sustituye en las derivadas parciales resultándolo siguiente:
Finalmente se obtiene una expresión reducida de los pesos actualizados mediante la
retropropagación:
Donde:
1.8 Aplicaciones Generales de las redes neuronales artificiales.
Las aplicaciones del las redes neuronales, son muy amplias, lo anterior debido a la
versatilidad de las redes neuronales y sus características, tales como el entrenamiento no
supervisado y su capacidad de procesamiento en paralelo, las cuales las ponen en ventaja
con relación a otras herramientas.
De forma general sus aplicaciones principales pueden destacarse en diferentes áreas, tales
biología, el ámbito empresarial, medio ambiente, economía, finanzas, manufactura,
medicina, aplicaciones militares, y un sinfín de aplicaciones ingenieriles. En el ámbito de
la mecánica. Las de interés para el desarrollo de esta tesis son aquellas en el área mecánica
1.8.1. Aplicaciones de las Redes Neuronales en Mecánica
El análisis de grietas y detección de defectos es importante para garantizar la integridad
estructural de materiales, los cuales son utilizados en estructuras de plantas en operación.
También resulta importante para la determinación de esfuerzos residuales y para la
evaluación del tiempo de vida útil de los elementos que componen una estructura. Para lo
anterior se ha recurrido a una serie de métodos de técnicas de evaluación no destructivas
(NDE) por sus siglas en ingles, mediante métodos experimentales como rayos X, ondas
de ultrasonido, por medio del uso de electroscopios o análisis mediante la generación de
útiles para detectar la existencia de grietas y la detección de defectos, por lo cual, las
técnica de evaluación cuantitativa no destructivas (QNDE) por sus siglas en ingles, son
una buena opción para detectar parámetros asociados tales como el tamaño de grietas, su
forma y su localización.
De acuerdo a la forma de tratamiento de los datos del problema, este puede ser resuelto por
medio de un análisis directo o inverso. En el caso de no contar con los parámetros de
defectos tales como el tamaño de grieta y la localización de defectos, estos pueden
determinarse a partir de la respuesta dinámica de un sólido medido en diferentes puntos
de su superficie. Lo anterior es un análisis inverso del problema. Por otra parte si se
conocen los parámetros del defecto, la respuesta dinámica de un sólido se puede obtener a
partir de análisis computacionales por medio de simulaciones mediante métodos numéricos
tales como el método del elemento finito, entre otros. Esto es lo que se conoce como un
análisis directo del problema.
El análisis inverso comprende el uso de redes neuronales artificiales, las cuales pueden ser
utilizadas para la localización de defectos, grietas y determinación del tamaño de grietas.
Al respecto, las Redes neuronales artificiales han sido aplicadas no solo al campo de la
ingeniería mecánica sino también resultan flexibles para realizar análisis en otros campos
de la ingeniería. Mediante este tipo de análisis y por medio de redes neuronales artificiales,
se ha trabajado en la detección de defectos y determinación de tamaño de grietas. Lo
anterior tiene como ventajas y desventajas que esta metodología es buena para realizar una
evaluación cuantitativa, se requiere un número determinado de simulaciones
computacionales en la aplicación de los procesos de identificación y es inevitable en la
optimización de métodos convencionales. La metodología es la siguiente:
1. Se realizan simulaciones mediante análisis por medio del método del elemento
finito.
2. Se realiza el entrenamiento de la red neuronal con pares de datos recabados de la
fase anterior.
3. El entrenamiento es utilizado para identificar parámetros para la determinación de
En el ámbito mecánico, Yagawa y Okuda (1995), reporta una serie de recientes
aplicaciones de las redes neuronales principalmente en el ámbito de la mecánica, las
cuales se mencionan a continuación:
• Detección de defectos por medio de potencial eléctrico: En este método, los parámetros tales como el tamaño y la localización de la grieta se determinan por
medio de mediciones de valores de potencial eléctrico en diferentes puntos del
espécimen a analizar. Lo anterior es lo que se conoce como un análisis inverso, por
el contrario, si se conocen los parámetros de grieta, una distribución del potencial
eléctrico puede ser fácil y el procedimiento para realizar el anterior análisis es el
siguiente:
1. El muestreo de datos de los parámetros de grieta tales como el tamaño, la
localización, el ángulo de rotación, contra los valores del potencial eléctrico.
Mediante patrones de entrenamiento, se realizan simulaciones para una gran gama
de combinaciones con los parámetros de grieta.
2. Se realiza el entrenamiento de una red neuronal artificial de retropropagación la
cual se entrena utilizando un determinado número de patrones de entrenamiento.
3. La red entrenada es capaz de identificar parámetros de grieta provenientes de la
medición de los valores del potencial eléctrico.
• Identificación de defectos basados en el método ultrasónico. En este análisis se plantea una placa con un defecto en su superficie. Una onda ultrasónica se propaga en la
superficie, a fin de identificar la ubicación vertical y horizontal de la punta de la
superficie del defecto. Esto mediante la onda reflejada. Se monitorea la respuesta
dinámica de los desplazamientos en 7 puntos. Para el análisis se una red neuronal con
el algoritmo EBP combinado estimando el error del entrenamiento. Se cuenta con el
número de puntos de monitoreo, el número de unidades ocultas y los factores de
aprendizaje. El análisis proporciona menor tiempo y exactitud por medio de la
implementación de la RNA (yoshimura y cols, 1993).
algunos materiales estructurales son sometidas a condiciones de carga severas, como
ciclos de carga variable, condiciones de irradiación o a altas presiones y temperaturas.
Las ecuaciones viscoplasticas constitutivas, relacionan varios parámetros necesarios
para determinar el comportamiento de los materiales. Ya se ha trabajado con respecto a
esto mediante el uso de RNA, con la finalidad de optimizar los múltiples parámetros
de las ecuaciones constitutivas viscoplásticas. (Yoshimura y cols, 1992).
Estos son solo algunos de los muchos ejemplos de las aplicaciones de las redes neuronales
artificiales en ingeniería mecánica. Actualmente en la sección de estudios de posgrado e
investigación de ESIME-IPN se ha trabajado con la detección de defectos y su
implementación al modelo constitutivo del comportamiento de materiales, así también se ha
modelado mediante la implementación de control difuso y redes neuronales para la
resolución de problemas en mecánica.
1.9. Planteamiento del problema.
Anteriormente ya se han aplicado análisis de fractura para la determinación de las
condiciones de inicio y propagación de grietas en distintos especímenes con distintas
piedades mecánicas y geométricas. Si bien lo anterior algunos de estos métodos se basan en
análisis numéricos que consumen muchos recursos de computo y mucho tiempo, al igual
que se considera la exactitud de los resultados que estos métodos proporcionan.
Debido a lo anterior el actual análisis consiste en la implementación de una Red neuronal
de Retropropagación para el análisis de las condiciones de fractura en placas metálicas.
Para lo anterior, El espécimen a analizar es una placa metálica con coeficiente de Poison
“υ” de 0.27 y un modulo de elasticidad “E” de “200MPa cuyo modo de carga es el tipo I y
posee una grita lateral. Se determinan los factores de intensidad de esfuerzos variando la
geometría y carga aplicada al espécimen. Primeramente por el método analítico y
posteriormente por medio del Método del Elemento Finito mediante el apoyo del paquete
computacional Ansys. Posteriormente, se desarrolla el análisis mediante una red neuronal
algoritmos a este modelo de RNA. Se propone un análisis directo, por lo que se cuenta con
las variables a, w, t, P (tamaño de grieta, ancho del espécimen, espesor y carga) para la
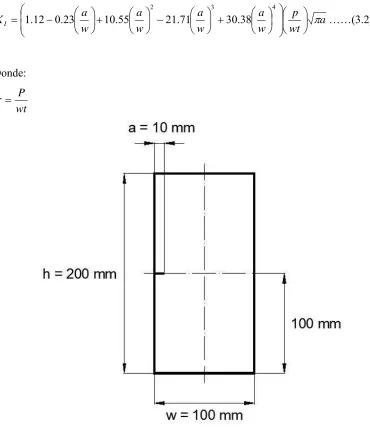
determinación de los factores de intensidad de esfuerzos.
Considerando lo anterior, en los 3 casos, se modifican las variables descritas, a fin de
modificar la geometría y las condiciones de carga para entrenar la red. Se genera una base
de datos con los valores del cálculo analítico de K, posteriormente se verifican los
resultados con el modelado mediante el MEF del cual también se forma una base de datos.
Los valores de K obtenidos de este último análisis ordenados aleatoriamente y son
utilizados para el entrenamiento de la RNA de retropropagación con los algoritmos
Levenberg-Marquardt, BFGS Quasi-Newton, Retropropagación elástica, Gradiente
conjugado, Fletcher-Reeves y la Secante de un paso. De lo anterior se identifica el
algoritmo que implementando a una red de Retropropagación, proporcionan los mejores
resultados considerando como criterios el tiempo de cálculo y el menor error cuadrático
medio. El algoritmo con mejores resultados en el entrenamiento se compara con los
resultados de la base de datos analíticos y numéricos por medio del MEF. Los datos son
analizados generando las conclusiones que se describen en el actual trabajo de tesis.
1.10. Sumario.
En el actual capitulo, se expusieron los conceptos básicos en torno a las redes neuronales
artificiales, haciendo un breve recorrido por la historia, sus orígenes y sus principios
básicos, así como sus aplicaciones en el área de interés de esta tesis. Se desarrollo una
descripción detallada del algoritmo de entrenamiento de retro propagación ya que este es el
que se propone para llevar a cabo el análisis de grietas en placas. En la sección de estudios
de posgrado e investigación de la ESIME-IPN, ya se ha trabajado con el uso redes
neuronales artificiales aplicadas a otros problemas de ingeniería mecánica y con este
análisis, se pretende contribuir con técnicas para el análisis mediante inteligencia artificial
en dicha área. Con lo anterior también se plantean las bases teóricas del algoritmo de retro
propagación cuyas ecuaciones serán utilizadas para el análisis mediante la implementación
En el siguiente capítulo, se describen brevemente los conceptos básicos en torno a
mecánica de la fractura, necesarios para la descripción del problema planteado en este
REFERENCIAS
Anderson A. J. (2007). Redes Neurales. Alfaomega. México
Bautista C. G.V. (2008) Implementación numérica de una red neuronal para el modelo
constitutivo del comportamiento de materiales. Tesis de maestría. SEPI-ESIME Zacatenco
México D. F.
Campanario, J.M. (2004). El enfoque conexionista en psicología cognitiva y algunas
aplicaciones sencillas en didáctica de las ciencias. Enseñanza de las ciencias, 22(1), 93-104 Castillo E., Cobo A., Gutiérrez J.M. (1999) Introducción a las redes funcionales con
aplicaciones. Un nuevo paradigma neuronal. Paraninfo, Madrid España.
Freeman A. James y Skapura M. David, (1993). Redes neuronales. Algoritomos,
aplicaciones y técnicas de propagación. Addison- Wesley/Diaz de Santos. Mexico.
Gori, M. (2003). Introduzione alle Reti Neuronali Artificiali. Mondo digitale. Numero 4.
Hagan, M. T., H. B. Demuth y M. Beale (1996). "Neural network design", Thomson
Learnig PWS Publishing Company . Pp 4-2.
Haykin, S. (1999). "Neural networks a comprehensive foundation", Prentice Hall, 2da
Edición.
Hebb, D (1949).. The Organization of Behaviour Wiley
Hilera, R. José y Martínez, J. Víctor. (2000). Redes neuronales artificiales. Fundamentos,
modelos y aplicaciones. Ed. Alfaomega. México. Pp. 2-7.
Izarrueta, F., Saavedra, C. (2008) Redes Neuronales artificiales. Departamento de física
Universidad concepción. Concepción Chile. Recuperadoel 6 Septiembre del 2008 de
http://dis.unal.edu.co/profesores/lucas/RedNeu/LiRna003.pdf
McCulloch and Pitts W. (1943). A logical Calculus of ideas immanent in nervous activity.
Minsky, M. y S. Papert, Eds. (1969). Perceptrons. Cambridge MA, MIT Press.
Müller B., Reinhardt J., Strickland M.T. (1995). Physics of neural networks. Neural
Netwoks, an introduction. Second Edition. Springer.
Muñoz San Roque A. (1996). Aplicación de técnicas de redes neuronales artificiales al
diagnistico de procesos industriales. Tesis doctoral. Universidad pontificia Comillas.
Madrid.
Pistolesi G, (1999) Il ritorno delle reti neuralli Parte I: La física della mente. Gennaio
1999, Byte Italia pp. 57-61
Rumelhart, D. E., G. E. Hinton y J. L. McClelland (1986). "A general framework for
parallel distributed processing." Parallel distributed processing 1.
Soria, E. y Blanco, A. (2001). Redes Neuronales Artificiales. ACTA. Pp 25-26. Recuperado
el 10 de Julio de 2008 de http://www.acta.es/articulos_mf/19023.pdf
Yoshimura, s., Hishida, H y Yagawa, G. (1992). “ Parameter optimization of viscoplastic
Constitutive equation using neural network”, VII International congress of experimental
mechanics, 1 pp. 296-301.
Yoshimura, S., Yagawa, G., Oishi, A y Yamada, K. (1993). “Quantitative Defect
identification by means of neural netwok and computacional mechanics”, 3rd Japan
CAPÍTULO
2
Conceptos Teóricos de Mecánica de la Fractura.
2.1. La Mecánica de la Fractura
El análisis de elementos mecánicos sometidos a distintos esfuerzos y en condiciones de
falla, ha sido trascendente a lo largo de la historia. Esto debido a las problemáticas que se
han reportado en la literatura debido a fallas de distintos elementos, costando vidas
humanas y pérdidas materiales cuantiosas, sin embargo, no siempre estas condiciones de
falla han sido una problemática. En épocas ancestrales, el debilitamiento de un material y a
su vez la generación de grietas, servían para la creación de utensilios de corte y de guerra.
La elaboración de estos consistía en la ruptura a través del impacto con materiales o
superficies más duras que el material a trabajar. Las fallas mecánicas se dan principalmente
a causa de grietas, fisuras o imperfecciones y desde los inicios de la humanidad, así como
en el presente, su estudio ha sido de gran interés. El hombre ha sido capaz de aplicarla con
gran éxito en el desarrollo de sus herramientas de caza o construcción [Timmins, 1994].
El fenómeno de fractura es relativamente común para los seres humanos, ya que lo
observamos constantemente a lo largo de nuestra vida. Lo anterior al romperse un vidrio,
una hoja o incluso se percibe mediante la ruptura de huesos y articulaciones del ser
humano. Si bien, algunas de las características de fractura de materiales son aplicadas
actualmente en distintos procesos ingenieriles, otro aspecto muy importante, que justifica
enormemente los esfuerzos de generar distintos métodos de análisis de materiales
sometidos a condiciones de falla es cuando están implicadas directamente pérdidas
es posible, por factores económicos o de seguridad, el desarrollar métodos de análisis
experimentales o de campo, para lo cual, han surgido métodos analíticos y numéricos tales
como los análisis por medio del Elemento Finito o métodos directos, que permiten simular
fallas en elementos mecánicos de forma relativamente rápida y eficiente en comparación de
otros, aunque existe la posibilidad de emplear métodos numéricos inversos, en donde las
redes neuronales artificiales (RNA), tiene un alto potencial
Estas técnicas son utilizadas, ya que en general los factores de los cuales depende el
fenómeno de fractura son las dimensiones del defecto, el estado de tensión al cual está
sometido el elemento, las características del material, la geometría del elemento en la
vecindad del defecto y la temperatura, por mencionar los más relevantes. Alternativamente
los métodos indirectos, como la utilización de RNA, son adecuados por cuestión de costo y
tiempo. Un aspecto de interés en Mecánica de la Fractura es el conocer el inicio de la
propagación de grietas y la detección de defectos en materiales, ya que estos son los
orígenes más comunes de la ruptura de materiales. Para estos estudios, una forma es
considerar los elementos o especímenes a analizar como continuos, basándose en teorías
elásticas lineales y elastoplásticas, las cuales permiten un criterio de análisis macroscópico.
2.1.1 Antecedentes históricos de la Mecánica de la Fractura.
Se considera que los primeros estudios en torno a Mecánica de la Fractura, se llevaron a
cabo en el siglo XIX. Sin embargo, el interés por estudiar formalmente estos fenómenos se
remontan hacia épocas anteriores. Timoshenko, (1983), refiere que los primeros estudios
sobre la Mecánica de la Fractura fueron realizados por Leonardo Da Vinci, con el objetivo
de determinar la resistencia de cuerdas o lianas, enunciando que dicha resistencia dependía
de la longitud de las mismas. Actualmente, se sabe que los estudios con relación a la
Mecánica de la Fractura pudieran ser más antiguos. Al revisar su trabajo con base en los
conocimientos actuales, es claro que la resistencia del material no depende de su longitud.