INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
ANÁLISIS DEL CAMPO RADIADO EN UNA GUÍA DE ONDA
RANURADA USANDO EL MÉTODO DE DIFERENCIAS FINITAS
EN EL DOMINIO DEL TIEMPO
T E S I S
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN CIENCIAS EN INGENIERÍA DE TELECOMUNICACIONES
PRESENTA:
ING. JAFETH ASCENCIÓN. ALONSO CARREÓN.
DIRECTOR DE TESIS
Al creador por dejarme vivir un día más y consecuentemente llegar hasta este momento. Al Universo por todo lo que me brinda.
A mi Padre Jafeth Alonso, que estaría muy orgulloso, pero se que me bendice desde donde esté. A mi Madre Fanny L. Carreón, por su apoyo, por su comprensión, por toda una vida de esmero, por todas sus enseñanzas, por que se, que más de una vez estuve en sus oraciones, por que tiene la difícil tarea de ser Padre y Madre. Por que me ha enseñando a vivir con dignidad, con honestidad, y sobre todo, con la fortaleza de siempre seguir adelante.
A mis hermanas: Fanny Zintli, Jaslin María, por que son uno de mis motivos para seguir adelante, por que siempre están conmigo, por que me apoyan incondicionalmente. Por compartir los buenos y malos ratos. Esperando que lleguen aún más lejos que yo.
A todos los maestros, profesores que coadyuvaron a mi formación profesional, a todos los que integran la Maestría en Ingeniería en Telecomunicaciones, en especial al Dr. José Luis López Bonilla, pues sus cátedras van más allá de solo trasmitir el conocimiento, pues es un hombre del que admiro su sencillez y su humildad. Al Dr. Jorge Sosa Pedroza, a quién admiro y respeto, que siempre creyó en mi, que a pesar de la tormenta siempre contaba con su apoyo, que a pesar de ser ahora Doctor, siempre será el Maestro que me enseño a luchar por lo que quiero.
A mis compañeros de la Maestría, por coincidir nuestros sueños, aquí en la Maestría, por que siempre son una motivación para continuar, por todos los momentos que la pasamos bien, por que me acostumbre tanto a ustedes que ya los considero parte de mi familia. En especial a Rosalía Tenorio, que entre llanto y llanto siempre nos apoyábamos, por que siempre que necesito un mano, ella estaba ahí, simplemente por ser una de mis mejores amigas.
Solo me resta decirles…
Muchas gracias
Sinceramente
INDICE
Pág .
Resumen VII
Abstract VIII
Objetivo X
Justificación X
CAPITULO I.
INTRODUCCIÓN AL MÉTODO DE DIFERENCIAS FINITAS EN EL DOMINIO DEL TIEMPO
1
1.1 Aproximaciones en Diferencia Finita 3
1.2 Esquema en Diferencia Finita de ecuaciones diferenciales parciales 6 1.2.1 Las expresiones en Diferencias Finitas de la derivada espacial y
temporal 7
1.3 Notación en Diferencias Finitas 8
1.4 Ecuaciones de Maxwell en tres dimensiones 9
1.5 El algoritmo de Yee 12
1.5.1 Ecuaciones de Maxwell expresadas en Diferencias Finitas 14 1.6 Adecuación de las Ecuaciones de Maxwell en DFDT 22
1.7 Condiciones de truncamiento 31
1.7.1 Condiciones de frontera absorbentes 31
1.7.2 Técnica de las Diferencias Finitas de Mur 32 1.7.3 Condiciones de capa perfectamente acoplada (PML) 35
1.8 Condiciones de frontera entre dos medios 38
1.9 Alimentación de las guías de onda 43
1.10 Condiciones de fuente de onda plana 49
1.11 Formulación campo total/campo disperso 49
1.12 Estabilidad 50
CAPITULO II
MÉTODO ANALÍTICO DE SOLUCIÓN DE GUÍAS DE ONDAS RECTANGULARES
54
2.1 Ondas electromagnéticas en guías de onda rectangular 54 2.1.1 Frecuencia de corte, longitud de onda de corte, longitud de onda en la
guía de onda. 56
2.1.2 Velocidad de fase y velocidad de grupo 57
2.2 Modos eléctricos transversales 58
2.2.1 Impedancia característica de los modos TE 59
2.2.2 Modos de propagación 59
2.3 Antenas de ranura 60
2.3.1 Principios de dualidad 61
2.3.2 Ranuras en las guías de onda 62
2.4 Reseña de la investigación de las guías de onda ranuradas 64
2.5 Patrón de radiación 68
CAPITULO III
SIMULACIÓN EN LA GUÍA DE ONDA RECTANGULAR 80
3.1 Obtención de parámetros del MDFDT para una guía de onda 80
3.2 Caracterización del medio 83
3.3 Condiciones de absorción de frontera 87
3.4 Condiciones de conductor perfecto 87
3.5 Fuentes de alimentación 88
3.6 Resultados numéricos 89
3.7 Simulación de los campos radiados 95
3.8 Redefinición de la región de cálculo 95
3.9 Implementación de las condiciones de frontera 97
3.10 Parámetros de la guía de onda ranurada 98
3.11 Resultados numéricos obtenidos y patrones de radiación 100 3.12 Comparación de resultados numéricos obtenidos 126
CAPITULO IV
CONLUSIONES, LIMITANTES Y TRABAJOS FUTUROS 137
4.1 Conclusiones 137
4.2 Limitantes 138
INDICE DE FIGURAS
Pág .
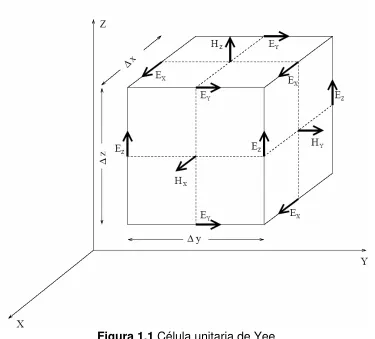
1.1 Célula unitaria de Yee 2
1.2 Estimación de la derivada de f(x) en el punto P usando diferencias hacia
delante, atrás y central. 3
1.3 Malla de diferencias finitas para las variables independientes x,y. 5 1.4 Célula Unitaria de Yee, indicando la posición de los componentes de
campo eléctrico y magnético. 13
1.5 Distribución espacio-temporal del Algoritmo de Yee 13 1.6 Representación de la ecuación 1.43a en donde se calcula el
componente x del campo eléctrico, que depende de los componentes Hy y Hz
16
1.7 Representación de la ecuación 1.43b en donde se calcula el componente y del campo eléctrico, que depende de los componentes Hx y Hz.
17
1.8 Representación de la ecuación 1.43c en donde se calcula el componente z del campo eléctrico, que depende de los componentes Hx y Hy. 18 1.9 Representación de la ecuación 1.44a en donde se calcula el
componente x del campo magnético, que depende de los componentes Ez y Ey
19
1.10 Representación de la ecuación 1.44b en donde se calcula el componente y del campo magnético, que depende de los otros dos componentes de campo eléctrico
20
1.11 Representación de la ecuación 1.44c en donde se calcula el componente z del campo magnético, que depende de los componentes Ex y Ey 21 1.12 Localización del campo eléctrico y magnético en el tiempo. 23 1.13 Localización del campo eléctrico y magnético en el espacio. 26
1.14 Frontera de la región de cálculo 32
1.15 Estructura de una malla bidimensional de DFDT teniendo ABC de PML. 37 1.16 Una cavidad cilíndrica parcialmente llena con un medio dieléctrico. 39
1.17 Frontera entre dos diferentes medios. 39
1.18 Frontera de un conductor perfecto 42
1.19 Línea de prueba coaxial acoplada a una guía de onda 44 1.20 Una fuente de corriente en una guía de onda 45
1.21 La punta de prueba y su imagen 47
1.22 Regiones de campo total y campo disperso 50
2.1 Guía de onda rectangular llena de aire con paredes conductoras
perfectas 54
2.2 Longitud de onda normalizada en la guía de onda como una función de
la frecuencia normalizada. 57
2.3 Velocidad de grupo normalizada como una función de la frecuencia
normalizada. 58
2.4 Longitud de onda de corte como una función de las dimensiones
transversales de la guía de onda 60
2.5a Principio de dualidad en electromagnetismo 60
estrecha de la guía de onda y tipos de ranuras radiadoras.
2.7 Diferentes tipos de ranuras en la guía de onda. 63 2.8 Distribución de corriente para el modo TE10 en el interior de la pared
ancha de la guía de onda y ranuras radiadoras comúnmente usadas 65 2.9 Posición de la apertura rectangular en un plano x-y 70 2.10 Patrón de radiación del campo Eφ de una ranura con a=3λ b=2λ 74 2.11 Patrón de radiación del campo Eθ de una ranura con a=3λ b=2λ 74 2.12 Patrón de radiación del campo de una ranura con m
m
φ
E a=0.03
015 . 0 = b
75 2.13 Patrón de radiación del campo de una ranura con m
m
θ
E a=0.03
015 . 0 = b
75 2.14 Patrón de radiación del campo Eφ de una ranura con a=b=0.15m 76 2.15 Patrón de radiación del campo Eθ de una ranura con a=b=0.15m 76 2.16 Patrón de radiación del campo de una ranura con m
m
φ
E a=0.025
0033 . 0 = b
77 2.17 Patrón de radiación del campo de una ranura con m
m
θ
E a=0.025
0033 . 0 = b
77
3.1 Esquema de la guia de onda 80
3.2 Esquema de la región de cálculo 83
3.3 Alimentación para el modo TE 89
3.4 Magnitud de Ex en el plano j=2 89
3.5 Magnitud de Ey en el plano j=5 90
3.6 Magnitud de Hx en el plano J=5 91
3.7 Magnitud de Hz en el plano J=5 91
3.8 Magnitud de Ex en el plano K90 92
3.9 Magnitud de Ey en el plano K90 92
3.10 Magnitud de Ez en el plano K90 93
3.11 Magnitud de Hx en el plano K90 94
3.12 Magnitud de Hy en el plano K90 94
3.13 Magnitud de Hz en el plano K90 95
3.14 Redimensionamiento de la región de cálculo 96 3.15 Visualización de las dos regiones de cálculo. 96 3.16 Vista de la pared ancha de la guía de onda, plano XZ 98
3.17 Modelado de la guía de onda ranurada 99
3.18 Magnitud de Ex en el plano XZ, con J=45 100
3.19 Magnitud de Ez en el plano XZ, con J=45 101
3.20 Magnitud de la suma vectorial de Ex y Ez en el plano XZ, con J=45 101
3.21 Magnitud de Ey en el plano XY, con K=90 102
3.22 Patrón de radiación de la magnitud de Ey en el plano XY, con K=90 y
con un radio de 35 celdas. 102
3.23 Magnitud de Ex en el plano XY, con K=90 103
3.24 Patrón de radiación de la magnitud de Ex en el plano XY, con K=90 y
con un radio de 35 celdas. 103
3.25 Magnitud de Ez en el plano XY, con Z=90 104
3.26 Patrón de radiación de la magnitud de Ez en el plano XY, con K=90 y
3.27 Magnitud de Ex en el plano XZ, con J=45 105
3.28 Magnitud de Ey en el plano XZ, con J=45 105
3.29 Magnitud de Ez en el plano XZ, con J=45 106
3.30 Magnitud de Ey en el plano XY, con K=90 106
3.31 Patrón de radiación de la magnitud de Ey en el plano XY, con K=90 y
con un radio de 35 celdas. 107
3.32 Magnitud de Ex en el plano XY, con K=90 107
3.33 Patrón de radiación de la magnitud de Ex en el plano XY, con K=90 y
con un radio de 35 celdas. 108
3.34 Magnitud de Ez en el plano XY, con K=90 108
3.35 Patrón de radiación de la magnitud de Ez en el plano XY, con K=90 y
con un radio de 35 celdas. 109
3.36 Suma vectorial de Ex y Ey en el plano XY, con K=90 109 3.37 Patrón de radiación de la suma vectorial de Ex y Ey en el plano XY, con
K=90, con un radio de 35 celdas. 110
3.38 Magnitud de Ex en el plano XZ, con J=45 110
3.39 Magnitud de Ey en el plano XZ, con J=45 111
3.40 Magnitud de Ez en el plano XZ, con J=45 111
3.41 Magnitud de Ey en el plano XY, con K=90 112
3.42 Patrón de radiación de la Magnitud de Ey en el plano XY con K=90, con
un radio de 35 celdas. 112
3.43 Magnitud de Ex en el plano XY, con K=90 113
3.44 Patrón de radiación de la Magnitud de Ex en el plano XY, con K=90, con
un radio de 35 celdas. 113
3.45 Magnitud de Ez en el plano XY, con K=90 114
3.46 Patrón de radiación de la Magnitud de Ez en el plano XY con K=90, con
un radio de 35 celdas. 114
3.47 Magnitud de la suma vectorial de Ex y Ey en el plano XY, con K=90 115 3.48 Patrón de radiación de la suma vectorial de Ex y Ey en el plano XY, con
K=90, con un radio de 35 celdas. 115
3.49 Magnitud de Ex en el plano XZ, con J=45 116
3.50 Magnitud de Ey en el plano XZ, con J=45 116
3.51 Magnitud de Ez en el plano XZ, con J=45 117
3.52 Magnitud de Ex en el plano XY, con K=90 117
3.53 Patrón de radiación de la suma vectorial de Ex y Ey en el plano XY, con
K=90, con un radio de 35 celdas. 118
3.54 Magnitud de Ey en el plano XY, con K=90. Se ilustra el radio del círculo
utilizado para el patrón de radiación 118
3.55 Patrón de radiación de la Magnitud de Ey en el plano XY, con K=90, con
un radio de 35 celdas. 119
3.56 Magnitud de Ez en el plano XY, con K=90. Se ilustra el radio del círculo
utilizado para el patrón de radiación 119
3.57 Patrón de radiación de la Magnitud de Ez en el plano XY, con K=90, con
un radio de 35 celdas. 120
3.58 Magnitud de la suma vectorial de Ex y Ey en el plano XY, con K=90. Se ilustra el círculo tomado para el patrón de radiación 120 3.59 Patrón de radiación de la suma vectorial de Ex y Ey en el plano XY, con
3.61 Ganancia de la ranura con diferentes desplazamientos. 122 3.62 Patrón de radiación para dos ranuras con diferentes desplazamientos. 122 3.63 Ganancia de dos ranuras con diferentes desplazamientos. 123 3.64 Patrón de radiación para cuatro ranuras con diferentes desplazamientos. 123 3.65 Ganancia de cuatro ranuras con diferentes desplazamientos. 124 3.66 Patrón de radiación para seis ranuras con diferentes desplazamientos. 124 3.67 Ganancia de seis ranuras con diferentes desplazamientos. 125 3.68 Patrón de radiación para 6, 4, 2 y 1 ranura con desplazamientos de 6
celdas. 125
3.69 Ganancia de 1, 2, 4, 6 ranuras con 6 celdas de desplazamiento. 126 3.70 Comparación de una ranura en un plano de tierra infinito y una ranura en
la guía de onda con 8 ∆ de desplazamiento. 127 3.71 Patrón de radiación en el plano del arreglo. Una ranura
Dos ranuras 128
3.72 Patrón de radiación de la suma vectorial de Ex y Ey en el plano XY, con
K=50, con un radio de 35 celdas. 129
3.73 Patrón de radiación de la suma vectorial de Ex y Ey en el plano XY, con
K=90, con un radio de 35 celdas. 129
3.74 Patrón de radiación para una guía de onda con 8 ranuras [12]. 130 3.75 Patrón de radiación para seis ranuras con diferentes desplazamientos. 130 3.76 Esquema de la pared ancha de la guía de onda con 9 ranuras 131 3.77 Comparación entre el patrón simulado (línea azul punteada) y el patrón
medido (línea roja continua) 133
3.78 Comparación entre el patrón comercial (línea negra), patrón medido (línea roja) y el patrón simulado (línea azul). 134
INDICE DE TABLAS
Pág .
2.1 Comparación de antenas complementarias 62
RESUMEN
En este trabajo se desarrolló e implementó una herramienta computacional para la simulación de campos radiados por una guía de onda ranurada. Partiendo de la representación de ecuaciones diferenciales con diferencia finitas hasta llegar a la implementación de las ecuaciones tridimensionales de Maxwell con diferencia finitas en el dominio del tiempo tomando como base el algoritmo de Yee. De esta forma se discretiza un espacio de cálculo a través de las células unitarias de Yee. El siguiente paso es definir las ecuaciones de frontera o ecuaciones de truncamiento para evitar reflexiones numéricas en nuestros cálculos.
Una vez que se definieron los aspectos antes mencionados, pasamos a aplicar el método de diferencias finitas en el dominio del tiempo con las seis ecuaciones de Maxwell a una guía de onda en la cuál se propaga el modo fundamental TE10, alimentada a través de un monopolo, obteniendo los resultados descritos en la teoría de guías de ondas.
ABSTRACT
This thesis work has developed and implemented a computational tool that simulates fields radiated by waveguide slotted. Beginning with the differential equations representation with finite differences; until the implantation of the 3-dimensional Maxwell’s equations with finite differences in the time domain; taking as base the Yee’s algorithm. By this way, the space of calculus is discretized trough the Yee’s unitary cells. The next step is to define the boundary equations or truncation equations in order to avoid the numerical reflections in our calculus.
Once that the aspects above were defined, we apply the method of finite differences in the time domain with the six Maxwell’s equations to a waveguide in which TE 10 mode is propagated fed by a monopole, obtaining the results described in the waveguide theory.
OBJETIVO
Obtener la distribución de campo electromagnético radiado por una ”guía de onda ranurada”, usando el “Método de Diferencias Finitas en el Dominio del Tiempo”, además de obtener el patrón de radiación en la guía mencionada.
JUSTIFICACIÓN
CAPITULO I
INTRODUCCIÓN AL MÉTODO DE DIFERENCIAS FINITAS EN EL
DOMINIO DEL TIEMPO
Durante los pasados 25 años el método de diferencias finitas en el dominio del tiempo (MDFDT) se convirtió en la herramienta de simulación ampliamente usada para problemas electromagnéticos. La DFDT es caracterizada por la solución de las ecuaciones de onda de Maxwell en el dominio del tiempo después de sustituir las derivadas por diferencias finitas. Actualmente se aplica a problemas de propagación, radiación y dispersión de ondas electromagnéticas. El método debe su éxito al poder y simplicidad que proporciona. Una buena medida de este éxito es el hecho de que algunos 5 mil artículos en el tema se han publicado en revistas y congresos internacionales además de libros y tutoriales, y de una docena de simuladores comerciales tanto específicos como de propósito general.
El método DFDT se basa en la discretización de las ecuaciones rotacionales de Maxwell mediante la aproximación de las derivadas por diferencias finitas centradas de segundo orden y el muestreo de medios y componentes en las posiciones espaciales y temporales especificadas, siguiendo el algoritmo de Yee, 1966 [1]. El esquema numérico resultante es explícito, del tipo salto de rana, que define una malla espacial ortogonal cúbica cuya célula unitaria se muestra en la figura 1.1 y permite expresar los valores del campo electromagnético en un instante dado, y en todos los puntos del espacio problema, en función de los que tuvo dicho campo en los instantes inmediatamente anteriores. Los materiales son modelados especificando sus características constantes en todos los puntos de la malla, normalmente en regiones homogéneas, en cuyas interfaces son necesarias unas adecuadas condiciones de continuidad. La relativa simplicidad del método le confiere una gran versatilidad y un gran potencial pero, al mismo tiempo, le marca un cierto número de limitaciones:
1.- El método es exigente en memoria y tiempo de cómputo. Tanto el uno como el otro crecen con los parámetros empleados (número de celdas, dimensiones de cada celda).
2.- La discretización de las derivadas espaciales y temporales emplea una aproximación de orden dos, lo que da como resultado una alta dispersión numérica de fase para resoluciones bajas.
3.- El muestreo de los medios dentro de una red ortogonal y regular conduce a un modelado en escalera de los mismos que sólo permite representar curvaturas superficiales de orden superior al incremento espacial ∆.
ocupado por los valores correspondientes al instante anterior, con lo que puede ahorrarse gran cantidad de memoria si no es necesario disponer de la historia temporal de cada punto.
Figura 1.1 Célula unitaria de Yee
El error en la solución para un problema dado depende del algoritmo empleado para simular cada parte del problema, especialmente la discretización de las derivadas, geometrías y materiales a modelar y las condiciones de truncamiento (ABCs). La aproximación de segundo orden para derivadas implica un error considerable de fase anisotrópico, aunque esto puede ser insignificante para problemas eléctricamente pequeños. No obstante, hoy en día disponemos de un gran poder de cómputo para hacer frente a problemas eléctricamente grandes
Uno de los principales problemas con cualquier solución de diferencias finitas de las ecuaciones de Maxwell es el tratamiento de los componentes del vector de campo en la región de truncamiento. Debido al almacenamiento limitado de la computadora, el espacio de computo debe limitarse a una región del problema, que sea suficiente para resultados adecuados, por lo que computacionalmente se trunca usando condiciones de absorción de frontera (ABC, por sus siglas en ingles)
fenómeno de reflexión numérica. Si bien, las condiciones de absorción de frontera de Mur [2] para problemas abiertos fueron las mas comúnmente usadas, la introducción del método de la capa perfectamente acoplada (por sus siglas inglés PML) de Berenger en 1994 [3] representaron un avance mayor en este campo.
Existen tres problemas, los cuales se trataran mas adelante, que emergen en el proceso de adaptación del método de DFDT para el modelado de situaciones reales:
1.- Condiciones de truncamiento.
2.- Condiciones de fuente de onda plana 3.- Formulación campo total/disperso
1.1 APROXIMACIONES EN DIFERENCIA FINITA
Recordemos la definición de derivada [5] la cual analíticamente esta dada por:
x y
x ∆
∆
→ ∆lim0
Con esto queremos decir que: “La derivada de una función es el limite de la razón del incremento de la función al incremento de la variable independiente cuando ésta tiende a cero”. Tomando una interpretación física tenemos que: “El valor de la derivada en cualquier punto de una curva es igual a la pendiente de la tangente a la curva en aquel punto ”
Dadas estas definiciones, consideremos ahora una función f(x) como la que se
muestra en la figura (1.2), en la cual se puede aproximar la derivada o pendiente de la tangente en el punto P:
Figura 1.2 Estimación de la derivada de f(x) en el punto P usando diferencias hacia
Por medio de la pendiente del arco PB tenemos:
( )
(
) ( )
x x f x x f x f
∆ − ∆ +
≅ 0 0
0
' 1.1
también conocida como fórmula en diferencia hacia delante.
Por medio de la pendiente del arco AP:
( )
( ) (
)
x
x x f x f x f
∆
∆ − −
≅ 0 0
0
' 1.2
conocida como fórmula en diferencia hacia atrás.
Por medio de la pendiente del arco AB tenemos
( )
(
) (
)
x
x x f x x f x f
∆
∆ − −
∆ + ≅
2
' 0 0
0 1.3
conocida como fórmula en diferencia central.
Al calcular el limite:
x y
x ∆
∆
→
∆lim0 , como podemos observar en las ecuaciones 1.1, 1.2, 1.3 estamos calculando la deriva de esa función. En otras palabras, una derivada puede ser expresada por diferencias, o viceversa, tal como se nos ha enseñado en los cursos de cálculo.
Debido a que el objetivo es calcular una deriva con diferencias, nos vemos forzados a resolver el lado derecho de las ecuaciones 1.1 a 1.3. Para lo cual nos auxiliaremos en las series de Taylor. Dadas de la siguiente forma:
(
)
( )
( )
( )
( )
( )
' ''( )
...! 3 1 ''
! 2
1
' 0 2 0 3 0
0
0+∆x = f x +∆xf x + ∆x f x + ∆x f x +
x
f 1.4
(
)
( )
( )
( )
( )
( )
' ''( )
...! 3
1 ''
! 2 1
' 0 2 0 3 0
0
0−∆x = f x −∆xf x + ∆x f x − ∆x f x +
x
f 1.5
Sumando estas expansiones se obtiene:
(
) (
)
( ) ( )
( ) ( )
40 2 0
0
0 x f x x 2f x x f '' x O x
x
f +∆ + −∆ = + ∆ + ∆ 1.6
en donde es el error introducido al truncar la serie y se dice que es de orden o simplemente . Por lo tanto,
( )
4x O ∆
( )
4x
Ahora para aplicar los conceptos de diferencias finitas a una función f(x,y), la cual representa un espacio de dos dimensiones, como el que se muestra en la figura 1.3, dividiremos el espacio en celdas con dimensiones ∆x y ∆y
Y
(i,j+1)
(i-1,j) (i,j) (i+1,j)
(i,j-1)
X y
i∆
[image:18.612.150.497.132.449.2]i∆x
Figura 1.3 Malla de diferencias finitas para las variables independientes x,y.
donde:
, , y j y
x i x
∆ =
∆ =
,... 2 , 1 , 0
,... 2 , 1 , 0 = = j i
Por lo que el valor de la función f en el punto P será:
(
i x,j y)
f(i,j) ffp = ∆ ∆ = 1.7
Las aproximaciones en diferencia central de las derivadas de f en el punto P o
nodo (i, j) son:
x
j i f j i f j i f
x ∆
− − + ≅ ∂
∂
2
) , 1 ( ) , 1 ( ) ,
( 1.8a
y j i f j
i f j i f
y ∆
− −
+ ≅
∂ ∂
2
) 1 , ( ) 1 , ( ) ,
2 2
2 ( 1, ) 2 (, ) ( 1, )
) , (
x
j i f j i f j i f j i f
x ∆
− + −
+ ≅ ∂
∂ 1.8c
2 2
2 (, 1) 2 (, ) ( , 1)
) , (
y
j i f j i f j
i f j i f
y ∆
− +
− + ≅
∂
∂ 1.8d
1.2 ESQUEMAS EN DIFERENCIA FINITA DE ECUACIONES DIFERENCIALES PARCIALES
Al resolver ecuaciones diferenciales parciales, podemos encontrar diferentes tipos de ecuaciones definidas por una ecuación cónica, la cual depende de los coeficientes de dicha ecuación. Por tal motivo, a continuación se explica como clasificar a las ecuaciones diferenciales dependiendo de la cónica que describan. Cada una tendrá características especiales y por lo tanto se trataran de modo especial.
Si se considera que una variable es espacial y la otra temporal, la ecuación diferencial parcial general de segundo orden puede ser expresada de la siguiente manera:
0
2 2 2
2 2
= + + ∂
∂ + ∂
∂ + ∂
∂ + ∂ ∂
∂ + ∂
∂
g fA A y e A x d A y c A y x b A x
a 1.9
donde:
a, b, c, d, e, f, g pueden depender de x, y
A = A(i∆x,j∆y).
Existen tres categorías en las cuales puede caer la ecuación anterior:
a) Hiperbólica: (b2-4ac)>0 1.10
Ejemplo
La ecuación de onda en una dimensión:
Ψ ∂
∂ − Ψ ∂
∂
2 2
2 0 2
2 1
t c
x 1.11
los coeficientes: a = 1, b = 0, c = -1/ c02
por lo que b2-4ac = -4ac = 4/ > 0 2 0
b) Parabólica: (b2-4ac)=0 1.12 Ejemplo:
La ecuación de difusión, puede ser expresada:
0
2 2
= Ψ ∂
∂ − Ψ ∂
∂
x k
t 1.13
los coeficientes: a = -k, b = 0, c = 0,e = 1
por lo que (b2-4ac)=0
c) Elíptica: (b2-4ac)<0 1.14
Ejemplo:
La ecuación de Poisson en dos dimensiones:
ρ
− = Ψ ⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
∂ ∂ + ∂
∂ Ψ
∇2 22 22
y
x 1.15
los coeficientes: a = 1, c = 1
por lo que: b2-4ac = -4ac < 0.
1.2.1 LAS EXPRESIONES EN DIFERENCIA FINITA DE LA DERIVADA ESPACIAL Y TEMPORAL
Se ha definido la aproximación y los esquemas de las diferencias finitas, ahora comenzaremos a definir ecuaciones diferenciales que dependen del espacio y del tiempo, ya que serán de gran ayuda para expresar a las ecuaciones de Maxwell en diferencias finitas. Considerando una función Ψ, en una dimensión, representaremos una diferencia en el espacio mediante las siguientes expresiones:
Diferencia espacial hacia delante:
( )
( )
x i i
x
n n
∆ Ψ − + Ψ ≈ Ψ ∂
∂ 1
1.16
Diferencia espacial hacia atrás:
( )
( )
x i i
x
n n
∆ − Ψ − Ψ ≈ Ψ ∂
∂ 1
1.17
Diferencia espacial central:
( )
( )
x i i
x
n n
∆ − Ψ − + Ψ ≈ Ψ ∂
∂
2
1 1
De la misma forma, representaremos una diferencia temporal en una dimensión mediante:
Diferencia temporal hacia delante:
( )
( )
t i i
t
n n
∆ Ψ − Ψ ≈ Ψ ∂
∂ +1
1.19
Diferencia temporal central
( )
( )
t i i
t
n n
∆ Ψ − Ψ ≈ Ψ ∂
∂ + −
2
1 1
1.20
Como el esquema en diferencias finitas a considerar es el de espacio-temporal centrado (leapfrog o salto de rana), que se relaciona directamente a las ecuaciones rotacionales de Maxwell, es el expresado en la siguiente ecuación, en donde el primer término
( )
Ψ esta en función del tiempo y el segundo( )
Φ del espacio.0 = Φ ∂
∂ + Ψ ∂
∂
x
t 1.21 a
( )
( )
( )
( )
02
1 1
2
1 1
= ∆
− Φ − + Φ + ∆
Ψ −
Ψ + −
x i i
t i
i n n n
n
1.21 b
( )
( )
(
1 1)
) ( )
( 1
1 Φ + −Φ −
∆ ∆ − Ψ
=
Ψ + −
i i
x t i
i n n n
n 1.22
1.3 NOTACION EN DIFERENCIAS FINITAS
Un punto espacial en una malla uniforme y rectangular se expresa como:
(
i, j,k) (
= i∆x, j∆y,k∆z)
1.23En esta expresión ∆x, ∆y y ∆z son los incrementos espaciales en la malla en las
direcciones coordenadas x, y y z respectivamente, y los valores i, j y k son enteros
positivos.
Cualquier función u espacio-temporal evaluada en un punto discreto en la malla y
en un punto discreto en el tiempo se denota como:
(
nk j i
u t n z k y j x i
u ∆ , ∆ , ∆ , ∆
)
= , , 1.24Donde:
∆t es el incremento de tiempo, que se asume uniforme sobre el intervalo
El Algoritmo de Yee utiliza expresiones en diferencias finitas centrada (diferencia central) para las derivadas espaciales y temporales. Considerando su expresión para la primera derivada parcial espacial de u en la dirección x, evaluada en el tiempo fijo tn=n∆t:
(
)
1/2, , 1/2, ,[ ]
( )
2, ,
, O x
x u u
t n z k y j x i x
u in jk
n k j i
∆ + ∆
− =
∆ ∆ ∆ ∆ ∂
∂ + − 1.25
La expresión de Yee para la primera derivada parcial temporal de u, evaluada en
un punto fijo en el espacio (i, j, k) se escribe por analogía de la siguiente manera:
(
)
[
( )
22 / 1 , , 2 / 1 , ,
, ,
, O t
t u u
t n z k y j x i t
u injk
n k j i
∆
+
]
∆ − =
∆ ∆ ∆ ∆ ∂
∂ + −
1.26
1.4 ECUACIONES DE MAXWELL EN TRES DIMENSIONES
Para describir los principios de transmisiones de microondas de alta potencia y para calcular todos los parámetros prácticos importantes para problemas relacionados es necesario utilizar los principios de propagación de ondas electromagnéticas.
La teoría de ondas electromagnéticas esta basada en el conjunto de ecuaciones de Maxwell, debidas a James Clerk Maxwell (1832-1879), quien formuló el conjunto de ecuaciones que gobiernan el comportamiento de los campos electromagnéticos. En los años 1886-1888, Heinrich Hertz comprobó experimentalmente la teoría de campos de Maxwell, en Karlsruhe, Alemania. Las ahora bien conocidas formas diferenciales de las ecuaciones de Maxwell están dados por [4,5,6]:
Ley de Faraday:
M E t
Br =−∇× r− r
∂ ∂
1.27
Ley de Ampere
J H t
Dr =∇× r − r
∂
∂ 1.28
Ley de Gauss para el campo eléctrico 0
= ⋅
Ley de Gauss para el campo magnético 0
= ⋅
∇ Br 1.30
En materiales dieléctricos lineales la relación entre la densidad de flujo eléctrico y el campo eléctrico está dada por las ecuaciones constitutivas como se describe a continuación:
E E
Dr =εr =ε0εr r 1.31
Para materiales magnéticos lineales, la relación entre inducción magnética y campo magnético esta dado por:
H H
B r
r r
r
0
µ µ
µ =
= 1.32
Donde:
Err Campo eléctrico (volts/metro)
Dr Densidad de flujo eléctrico (coulombs/metro2) Hr Campo magnético (amperes/metro)
Densidad de flujo magnético (webers/metro
Br 2)
Densidad de corriente eléctrica (amperes/metro) Jr
Mr Densidad de corriente magnética equivalente (volts/metro)
ε Permitividad eléctrica (farads/metro) r
ε Permitividad relativa (escalar sin dimensión)
0
ε Permitividad del espacio libre (8.854x10-12 farads/metro) µ Permeabilidad magnética (henrys/metro)
r
µ Permeabilidad relativa (escalar sin dimensión) 0
µ Permeabilidad del espacio libre (4πx10-7 henrys/metro)
Se considera:
a) Un medio sin pérdidas eléctricas ni magnéticas Jr y Mr pueden actuar como fuentes independientes de energía eléctrica y magnética, Jrfuente y Mr fuente
b) Un medio con pérdidas eléctricas y magnéticas no dispersivas donde los campos Err y Hr se atenúan por medio de la conversión de energía electromagnética en calor y Jr Mr son:
E J
Jr= rfuente +σr 1.33
H M
Mr = rfuente+σ* r 1.34 donde:
σ : Conductividad eléctrica (siemens/metro) *
c) Se obtienen las ecuaciones rotacionales de Maxwell para medios lineales, isotrópicos no dispersivos con pérdidas:
(
M HE t H fuente r r r
)
r * 1 1 σ µ µ∇× − + − = ∂∂ 1.35
(
J EH t E fuente r r r r σ ε ε ∇× − + = ∂
∂ 1 1
)
1.36
d) De las componentes vectoriales de los operadores rotacionales de las ecuaciones 1.35 y 1.36 en coordenadas cartesianas, obtenemos el sistema de seis ecuaciones escalares acopladas:
(
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − ∂ ∂ − ∂ ∂ = ∂ ∂ x funte z yx M H
y E z E t H x * 1 σ
µ
)
1.37a(
)
⎥⎦⎤ ⎢⎣ ⎡ − + ∂ ∂ − ∂ ∂ = ∂ ∂ y funte x z y H M z E x E t H y * 1 σµ 1.37b
(
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − ∂ ∂ − ∂ ∂ = ∂ ∂ z fuente y xz M H
x E y E t H z * 1 σ
µ
)
1.37c(
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − ∂ ∂ − ∂ ∂ = ∂ ∂ x fuente y zx J E
z H y H t E x σ ε 1
)
1.38a(
)
⎥⎦⎤ ⎢⎣ ⎡ − + ∂ ∂ − ∂ ∂ = ∂ ∂ y fuente z x y E J x H z H t E y σ ε 1 1.38b(
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − ∂ ∂ − ∂ ∂ = ∂ ∂ z fuente x yz J E
y H x H t E z σ ε 1
)
1.38ce) Este sistema de ecuaciones, forma la base del algoritmo numérico de Diferencias Finitas en el Dominio del Tiempo (DFDT) para interacción de ondas electromagnéticas con objetos tridimensionales.
f) El algoritmo DFDT no necesita forzar explícitamente la ley de Gauss indicando valores nulos de carga eléctrica y magnética, debido a que estas relaciones son una consecuencia teórica directa de las ecuaciones rotacionales.
1.5 EL ALGORITMO DE YEE
El algoritmo de Yee [4] presenta las siguientes características:
a) Resuelve los campos eléctricos y magnéticos en tiempo y en espacio usando las ecuaciones rotacionales de Maxwell acopladas en vez de resolver el campo eléctrico (o el magnético) por sí solo por medio de la ecuación de onda.
b) Centra los componentes Er y Hr en un espacio tridimensional, de tal manera que cada componente Er está rodeado por cuatro componentes de Hr circulantes, y cada componente de Hr está rodeado por cuatro componentes deErcirculantes, como se muestra en la figura (1.4).
c) Esto proporciona una visión tridimensional de un espacio cubierto por contornos entrelazados de leyes de Faraday y Ampere.
d) Es posible identificar las componentes Er en la célula de Yee asociadas con el flujo de desplazamiento de corriente que se entrelazan con los lazos de Hr, así como los componentes Hr asociados con el flujo magnético que se entrelazan con los lazos de Er.
e) Las expresiones en diferencia finita de las derivadas espaciales usadas en los operadores rotacionales son diferencias centrales de segundo orden de exactitud. La continuidad de los componentes tangenciales y Er Hr se mantienen de manera natural a través de una interfase de materiales distintos si la interfase es paralela a uno de los ejes coordenados de la célula; en este caso no hay necesidad de forzar condiciones de frontera especiales en la interfase.
Figura 1.4 Célula Unitaria de Yee, indicando la posición de los componentes de campo eléctrico y magnético.
E
v
E
v
E
v
E
v
H
r
H
r
H
r
E
v
E
v
E
v
E
v
H
r
H
r
H
r
E
v
E
v
E
v
E
v
t=2∆t
t=1.5∆t
t=0.5∆t
t=∆t
t=0
x=0 x=∆x x=2∆x x=3∆x
Figura. 1.5 Distribución espacio-temporal del Algoritmo de Yee
Observando la figura 1.5. tenemos:
b) Todos los valores de Er en la región modelada son calculados y almacenados en memoria en un punto particular del tiempo usando los datos de Hr almacenados previamente.
c) Todos los valores de Hr en la región modelada son calculados y almacenados en memoria usando los valores de Er calculados previamente.
d) El ciclo empieza de nuevo recalculando los componentes de Er basados en los nuevos valores obtenidos de Hr .
e) Este proceso continúa hasta que el escalonado temporal concluye.
1.5.1 ECUACIONES DE MAXWELL EXPRESADAS EN DIFERENCIAS FINITAS
Los conceptos y notaciones anteriores se aplican ahora para obtener una aproximación numérica de las ecuaciones rotacionales de Maxwell en tres dimensiones.
Tomando las ecuaciones 1.37 y 1.38, se considera la sustitución de las diferencias centrales por las derivadas espacio-temporales. De esta manera se obtiene para Ex:
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − − ∆ − − ∆ − ⋅ = ∆ − + + + + + + + + + + + + + + − + + + + + n k j i x k j i n k j i source n k j i y n k j i y n k j i z n k j i z k j i n k j i x n k j i x E J z H H y H H t E E
x , 1/2, 1/2 , 1/2, 1/2 , 1/2, 1/2
, 2 / 1 , 1 , 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 1 σ
ε 1.39
Todos los valores de campo del lado derecho de la ecuación están evaluados en el escalonado temporal n, incluyendo el campo eléctrico Ex que aparece debido a la conductividad del material σ. Debido a que los valores de Ex en t = n no están almacenados en la memoria de la computadora (únicamente los valores de tiempo en el instante t = n – ½) se necesita estimar dicho término de alguna manera.
Una forma eficiente de lograr tal estimación es utilizando una aproximación semi-implícita, que se describe como sigue:
2 2 / 1 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , − + + + + + + + + = n k j i x n k j i x n k j i x E E
E 1.40
⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⋅ − − ∆ − − ∆ − ⋅ ∆ = − − + + + + + + + + + + + + + + + + + − + + + + + 2 2 / 1 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , n k j i x n k j i x k j i n k j i source n k j i y n k j i y n k j i z n k j i z k j i n k j i x n k j i x E E J z H H y H H t E E x σ ε 1.41
Como los términos n,+1+/12/2, +1/2 k j i x
E y Exin,−j1+/12/2,k+1/2 aparecen en ambos lados de la
ecuación 1.41, se agrupan todos los términos del mismo tipo y se despeja n,+1+/12/2, +1/2 k j i x
E en el lado izquierdo de la expresión, lo que conduce a:
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + + + + + + + + + + + − + + + + + + + + + + + + + n k j i source n k j i y n k j i y n k j i z n k j i z k j i n k j i x k j i k j i n k j i x k j i k j i x J z H H y H H t E t E t 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 1 2 1 ε ε σ ε σ 1.42
Dividiendo ambos lados por
(
1+σi,j+1/2,k+1/2∆t 2εi,j+1/2,k+1/2)
se obtiene la relación explícita para n,+1+/12/2, +1/2k j i x
E :
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = + + + + + + + + + + + + + + − + + + + + + + + + + + + + n k j i source n k j i y n k j i y n k j i z n k j i z k j i k j i k j i n k j i x k j i k j i k j i k j i n k j i x x J z H H y H H t t E t t E 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , , 2 / 1 , 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 1 2 1 2 1 ε σ ε ε σ ε σ 1.43a
La representación grafica de esta ecuación se muestra en la figura 1.6
⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = + + − + + − + + + − + + − + + − + + − + + − − + + − + + − + + − + + − + + − + + + − n k j i source n k j i z n k j i z n k j i x n k j i x k j i k j i k j i n k j i y k j i k j i k j i k j i n k j i y y J x H H z H H t t E t t E 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 1 2 / 1 , 1 , , 1 , 2 / 1 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 2 / 1 , 1 , 2 / 1 2 1 2 1 2 1 ε σ ε ε σ ε σ 1.43b
La representación grafica de la ecuación 1.43b se muestra en la figura 1.7
Figura 1.6 Representación de la ecuación 1.43a en donde se calcula el componente x
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = + + − + − + + − + + − + + + + − + + − + + − − + + − + + − + + − + + − + + − + + + − n k j i source n k j i x n k j i x n k j i y n k j i y k j i k j i k j i n k j i z k j i k j i k j i k j i n k j i z z J y H H x H H t t E t t E 1 , 2 / 1 , 2 / 1 1 , , 2 / 1 1 , 1 , 2 / 1 1 , 2 / 1 , 1 1 , 2 / 1 , 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 2 / 1 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 2 / 1 1 , 2 / 1 , 2 / 1 2 1 2 1 2 1 ε σ ε ε σ ε σ 1.43c
De igual manera, en la figura 1.8, es la representación grafica de 1.43c
Figura 1.7 Representación de la ecuación 1.43b en donde se calcula el componente y
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = + + + − + + + − + + + − + + + − + + + − + + − + + − + + − + + − + + − + + − + + − + + − + + + − 2 / 1 1 , 1 , 2 / 1 2 / 1 1 , 2 / 1 , 2 / 1 2 / 1 1 , 2 / 3 , 2 / 1 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 2 / 3 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 , 1 , 2 / 1 1 1 , 1 , 2 / 1 2 * 1 2 * 1 2 * 1 n k j i source n k j i z n k j i z n k j i y n k j i y k j i k j i k j i n k j i x k j i k j i k j i k j i n k j i x x M y E E z E E t t H t t H µ σ µ µ σ µ σ 1.44a
La representación grafica de la ecuación 1.44a se muestra en la figura 1.9, la cual se deriva de la figura 1.8.
Figura 1.8 Representación de la ecuación 1.43c en donde se calcula el componente z
⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = + + + + + + + + + + + + − + + + + + + + + + + + + + + + + + + + + + + + 2 / 1 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 1 , 2 / 1 2 / 3 , 2 / 1 , 2 / 1 1 , 2 / 1 , 2 / 1 2 / 1 1 , 2 / 1 , 2 / 1 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 1 , 2 / 1 , 2 * 1 2 * 1 2 * 1 n k j i source n k j i x n k j i x n k j i z n k j i z k j i k j i k j i n k j i y k j i k j i k j i k j i n k j i y y M z E E x E E t t H t t H µ σ µ µ σ µ σ 1.44b
La representación grafica de la ecuación 1.44b se muestra en la figura 1.10, en la cual se observa como va avanzando hacia la malla siguiente. Conformando así un espacio discretizado para las ecuaciones de Maxwell.
Figura 1.9 Representación de la ecuación 1.44a en donde se calcula el componente x
⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − ∆ − − ∆ − ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∆ − = + + + + + + − + + + + + + + + + + + + + + + + + + + + + + + + + + + + + 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 2 / 1 , 1 , 2 / 1 2 / 1 2 / 1 , 2 / 1 , 2 / 1 2 / 1 , 2 / 3 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 2 / 1 , 1 , 1 2 / 1 , 1 , 2 * 1 2 * 1 2 * 1 n k j i source n k j i y n k j i y n k j i x n k j i x k j i k j i k j i n k j i z k j i k j i k j i k j i n k j i z z M x E E y E E t t H t t H µ σ µ µ σ µ σ 1.44c
Por ultimo, tenemos la representación de la ecuación 1.44 c en la figura 1.11.
Figura 1.10 Representación de la ecuación 1.44b en donde se calcula el componente y
Figura 1.11 Representación de la ecuación 1.44c en donde se calcula el componente z del campo magnético, que depende de los componentes Ex y Ey
Por lo tanto, con este sistema de ecuaciones en diferencia finita, un nuevo valor de campo electromagnético en cualquier punto de la malla depende únicamente de su valor previo, los valores previos de las componentes de campo en los puntos adyacentes, y de las fuentes de corriente eléctrica y magnética conocidas.
Analizando las ecuaciones 1.43 y 1.44, observamos que el valor de campo que se localiza en una cara de la célula unitaria de Yee, es la arista de la siguiente célula unitaria, y viceversa.
En resumen, se tienen las siguientes características de la célula de Yee:
a) Las expresiones en diferencia finita de las derivadas espaciales usadas en los operadores rotacionales son diferencias centrales de segundo orden de exactitud.
posición de los componentes de campo, lo que conduce a una aproximación "escalonada" de la superficie y geometría interna de la estructura, con una resolución espacial determinada por el tamaño de la célda unitaria.
c) La ubicación de los componentes x en la célula de Yee y las operaciones en diferencia central de estos mismos componentes obligan implícitamente las dos relaciones de la Ley de Gauss, es decir, en la célula de Yee la divergencia es cero con respecto a sus campos y en ausencia de cargas eléctricas y magnéticas libres.
d) El esquema leapfrog es completamente explícito, lo que evita el tipo de problemas involucrados con ecuaciones simultáneas e inversión de matrices.
e) Las expresiones en diferencia finita de las derivadas temporales son diferencias centrales de segundo orden de exactitud.
f) El algoritmo escalonado temporal es no disipativo, es decir, si una onda numérica se propaga en la región modelada ésta no se disipa por medios distintos a los físicos.
1.6 ADECUACION DE LAS ECUACIONES DE MAXWELL EN DFDT
Ahora tenemos que modificar las ecuaciones 1.43 y 1.44, ya que como se van a codificar en un lenguaje de programación, tenemos que redondear los índices que contienen el termino ½, dado que en los lenguajes de programación solo se manejan números enteros.
Tomando la ecuación 1.43a como referencia y la figura 1.12 como la representación temporal de los campos. En donde los números dentro de las celdas representan el tiempo transcurrido. El subíndice de los campos magnéticos o eléctricos representa el índice del arreglo en el lenguaje de programación. Ahora consideremos la ecuación 1.43a y concentraremos nuestra atención a los componentes de campo eléctrico que se encuentran en ambos lados de la ecuación, tomando solo el desplazamiento temporal. Con lo cual tenemos:
2 / 1
+ n x
E 1.45
2 / 1
− n x
0 1 2 3 4 5
E0 E1 E2 E3 E4
0 1 2 3 4 5
H0 H1 H2 H3 H4 H5
0 1 2 3 4 5
Figura 1.12. Localización del campo eléctrico y magnético en el tiempo.
Tomando un valor para n en las ecuaciones 1.45 y 1.46, por ejemplo n=3, tenemos:
2 / 1 3+ x
E 1.47
2 / 1 3− x
E 1.48
Auxiliándonos de la figura 1.12, observamos que el valor para 1.47 es 3, y para la 1.48 el valor resultante es de 2. En conclusión tenemos:
n x n
x E
E +1/2 = 1.49
1 2
/
1 −
−
= n x n
x E
E 1.50
tomando n=3, que para calcular 1.47 que depende de 1.48 y de los valores de H. En donde:
n
H
H3 = 1.51
Realizando un análisis similar para 1.43b y 1.43c, o incluso concentrando nuestra atención solo al desplazamiento temporal de los campos eléctrico y magnético concluimos que:
n n
E
E +1/2 = 1.52
1 2
/
1 −
−
= n n
E
E 1.53
En donde no se expresa la componente del campo magnético, ya que no influye en el desplazamiento temporal, y por lo tanto 1.52 y 1.53 se consideran ecuaciones genéricas, aplicables a cualquier componente de campo eléctrico.
Continuando con el análisis, ahora enfocaremos nuestra atención a la ecuación 1.44, en particular 1.44a. Tomando los valores de campo magnético evaluados en el tiempo, tenemos:
1
+ n x
H 1.54
n x
H 1.55
2 / 1
+ n y
E 1.56
Aplicando 1.52 a 1.56 y a manera de ejemplo, se toma n=3. Con lo que obtenemos:
4 1 3
x
x H
H + = 1.57
3
x
H 1.58
3 2
/ 1
y n y n
y E E
E + = = 1.59
Con los valores obtenidos en 1.57, 1.58 y 1.59, podemos decir que el valor a calcular de la componente x del campo magnético es igual a esa misma componente de campo magnético en un valor de tiempo antes y al valor de la componente del campo eléctrico un tiempo antes. Lo anterior queda expresado como:
n x
x H
H 4= 1.60
1
3 −
= n x
x H
H 1.61
1
3 −
= n y
y E
Tomando las ecuaciones 1.44b y 1.44c, observamos que ambas tienen el mismo desplazamiento temporal que 1.44a. Basados en esto, llegamos a las ecuaciones genéricas:
n n
H
H +1= 1.60a
1 1 − −
= n n
H
H 1.61a
1 2 /
1 −
+
= n n
E
E 1.62a
Con esto terminamos con la normalización de los índices para la variación en el tiempo. Ahora realizaremos el análisis para la variación en el espacio.
Ahora consideremos la figura 1.13 como la representación de la variación espacial de las ecuaciones 1.43 y 1.44. Comenzamos analizando la ecuación 1.43a, en donde el valor de Ex del lado derecho tiene sus respectivos índices espaciales, sin embargo estos índices se repiten en el lado izquierdo de la ecuación, a excepción de los índices espaciales del campo magnético que cambian solo en la variable en las cuales se realiza la diferencial parcial. Con base a lo anterior, tomaremos los valores espaciales del campo eléctrico como punto de partida y así, analizamos solamente los índices espaciales de Hz y Hy, quedando:
2 / 1 , 2 / 1 ,j+ k+ i x
E 1.64
2 / 1 , ,
2 / 1 , 1 ,
+ + +
k j i z
k j i z
H H
1.65
k j i y
k j i y
H H
, 2 / 1 ,
1 , 2 / 1 ,
+ + +
1.66
Ahora solo conservaremos los índices espaciales que varían. O de otra forma; solo conservamos el índice espacial en el cual se hace la deriva parcial.
j z
j z
H H +1
1.67
k y
k y
H H
1
0 1 2 3 4 5
E1 E2 E3 E4 E5
0 1 2 3 4 5
H0 H1 H2 H3 H4 H5
0 1 2 3 4 5
Figura 1.13. Localización del campo eléctrico y magnético en el espacio.
Para visualizar mejor el procedimiento de normalización de los índices, tomaremos un valor para el índice j y luego para k. Tomando solo el índice j de 1.65 y 1.67 con j=2, tenemos:
2 / 1 2 2 /
1 +
+ = x
j
x E
E 1.69
2 1 2 1
z j z
z j
z
H H
H H
=
= +
+
1.70
Revisando la figura 1.12, los índices quedan como:
3 2 / 1
2 x
x E
2
3 1 2
z
z z
H
H H + =
1.72
Ya que es el valor de Ex el que se va a calcular, se toman esos índices como punto de partida. Entonces 1.71 y 1.72 quedan como:
j x
x E
E 3 = 1.73
1 2
3
−
= =
j z z
j z z
H H
H H
1.74
Ahora es el turno del índice k. Tomando solo el índice k de 1.64 y 1.68 con k=2, tenemos:
2 / 1 2 2 /
1 +
+ = x
k
x E
E 1.75
2 1 2 1
y k y
y k
y
H H
H H
= =
+
+ 1.76
Localizamos estos valores en la figura 3.4, con lo que los índices quedan:
3 2 / 1
2 x
x E
E + = 1.77
2 2
3 1 2
y y
y y
H H
H H
= =
+ 1.78
Tomando el índice de Ex como punto de partida, tenemos:
k x
x E
E 3 = 1.79
1 2
3
−
= =
k y y
k y y
H H
H H
1.80
Se toma el índice k Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo eléctrico k x k x k y H H E 1 2 / 1 + + 2 1 2 2 / 1 2 x x y H H E + + 2 3 3 x x y H H E 1 − k x k x k y H H E
Se toma el índice i Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo eléctrico 1 2 / 1 − − i z i z i y H H E 1 2 2 2 / 1 2 − − z z y H H E 1 2 2 z z y H H E 1 − i z i z i y H H E
Lo mismo ocurre para 1.43c:
Se toma el índice i Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo eléctrico 1 2 / 1 − − i y i y i z H H E 1 2 2 2 / 1 2 − − y y z H H E 1 2 1 y y z H H E i y i y i z H H E 1 +
Se toma el índice j Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Un análisis similar se realiza para el conjunto de ecuaciones 1.44, obteniendo los siguientes resultados, Para la ecuación 1.44a tenemos:
Se toma el índice k Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo magnético 2 / 1 2 / 3 1 + + + k y k y k x E E H 2 / 1 2 2 / 3 2 1 2 + + + y y x E E H 3 4 3 y y x E E H k y k y k x E E H 1 +
Se toma el índice j Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo magnético 2 / 1 2 / 3 1 + + + j z j z j x E E H 2 / 1 2 2 / 3 2 1 2 + + + z z x E E H 3 4 3 z z x E E H j z j z j x E E H 1 +
En la ecuación 1.44b, se obtienen lo siguiente: Se toma el índice i Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo magnético 2 / 1 2 / 1 − + i z i z i y E E H 2 / 1 2 2 / 1 2 2 − + z z y E E H 2 3 2 z z y E E H i z i z i y E E H 1 +
Se toma el índice k Se le asigna un
valor al índice Se toman los índices en base a la figura 1.12
Se toma como punto de partida el campo magnético 2 / 1 2 / 3 1 + + + k x k x k y E E H 2 / 1 2 2 / 3 2 1 2 + + + x x y E E H 2 / 1 2 2 / 1 3 3 + + x x y E E H k x k x k y E E H 1 +