Diseño e implementación de un Sistema Scada para el control de nivel y temperatura del tanque de agua caliente de la Planta de Procesos Análogos (Ppa)
42
0
0
Texto completo
(2) 0 0 0.01 0 0 0 0.01 0 0.02 0.03 0.02 0.01 0 0.02 0.02 0.01 0 0.002 0.005 0.001 0.004 0.003 0.012 0.012 0.002 0.024 0.008 0.03 0.004 0.001 0.095 0.007 0.033 0.011 0.02 0.001 0.004 0 0.001 0.002 0.008. 13.1 12.89 12.68 12.49 12.28 12.09 11.88 11.66 11.43 11.21 11.06 10.85 10.62 10.43 10.22 10 9.8 9.605 9.39 9.194 8.963 8.758 8.54 8.334 8.139 7.898 7.72 7.54 7.312 7.115 6.79 6.67 6.49 6.285 6.06 5.831 5.624 5.42 5.195 4.99 4.79. 13.1 12.89 12.69 12.49 12.28 12.09 11.87 11.66 11.45 11.24 11.04 10.84 10.62 10.41 10.2 10.01 9.8 9.603 9.395 9.195 8.967 8.761 8.552 8.346 8.137 7.922 7.728 7.51 7.316 7.114 6.885 6.663 6.457 6.274 6.04 5.832 5.628 5.42 5.194 4.992 4.798. 22.5 22 21.5 21 20.5 20 19.5 19 18.5 18 17.5 17 16.5 16 15.5 15 14.5 14 13.5 13 12.5 12 11.5 11 10.5 10 9.5 9 8.5 8 7.5 7 6.5 6 5.5 5 4.5 4 3.5 3 2.5. 0 0.01 0.01 0 0.003 0.004 0.003 0.003 0.001 0.001 0.002 0.002 0.003 0.01 0.02 0.002 0.005 0.001 0.001 0.011 0.001 0 0.006 0.003 0.007 0.001 0.008. 13. 10.52 10.27 10.05 9.8 9.531 9.304 9.05 8.801 8.551 8.293 8.032 7.792 7.55 7.5 7.27 7.03 6.51 6.273 6.07 5.78 5.54 5.304 5.052 4.795 4.531 4.291 4.021. 10.52 10.28 10.06 9.8 9.534 9.3 9.053 8.804 8.552 8.294 8.034 7.794 7.553 7.51 7.29 7.032 6.515 6.274 6.071 5.791 5.539 5.304 5.058 4.798 4.538 4.292 4.029. 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1.
(3) 0.007 0.006 0.002. 4.61 4.37 4.172. 4.617 4.376 4.174. 2 1.5 1. Tabla A1.1 Sensor de Nivel (Volumen Vs Corriente) y (Altura Vs Corriente) Anexo 2 Calibración Sensor Temperatura. Para la calibración de del termopar tipo J, se toma una temperatura conocida, este caso se utiliza hielo el cual tiene una temperatura de 0°C agregándolo al tanque que contiene agua, Ver Figura A2.1, dando espera a que el agua tome la misma temperatura del hielo. En el instrumento de visualización HMI, se verifica la lectura de la temperatura del hielo de 0°C y efectuando la respectiva corrección de la medición. Para verificar que el instrumento funciona adecuadamente se efectúa un corto o puente en la entrada del termopar, de modo que el voltaje sea 0v y se verifica la lectura en la HMI.. Figura A2.1. Se tiene como patrón de comparación la cámara térmica Modelo FLIR i7,Ver Figura A2.2 con certificado de calibración, Ver Figura A2.3.. 14.
(4) Figura A2.2 Cámara Térmica. Figura A2.3 Certificado Calibración. 15.
(5) Verificando la medida de temperatura del termopar a medida que se varia la temperatura del agua gracias al actuador; resistencia térmica tomando datos cada 1ºC. Figura A2.4 Fotografías cámara térmica y multímetro patrones de medida FLIR i7.. Figura A2.4 Algunas Fotografías Patrones Térmicos 16.
(6) RSlogix 7264 7315 7366 7421 7460 7500 7565 7620 7663 7715 7765 7820 7863 7925 7950 7990 8035 8085 8137 8180 8230 8264 8322 8375 8424 8470. T. Mult. (ºC) 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50. T. Cam. (ºC) 25.2 26.6 27.4 28.4 29.1 30.7 31.1 32.3 33.6 34.5 35.4 35.3 37.7 38.2 39.8 40.5 41.6 42.6 43.2 44.4 45.2 46.6 47.1 48.4 49.6 50.3. Tabla A2.1 Anexo 3 Asignación IP al variador PorwerFlex40. Para la asignación de la IP al variador PowerFlex40 siga los siguientes pasos basándose en los numerales y en sus figuras. 1. Antes de comenzar la asignación de la IP del variador PorwerFlex40 verifique la Mac, ver Figura A3.1 que se encuentra al respaldo del variador.. 17.
(7) Figura A3.1 Mac PowerFlex40 2. De clic en inicio, en el buscador digite “bootp” y abra el programa “BOOTPGHCP Server”. Ver Figura A3.2. Figura A3.2 BOOTP-GHCP Server 3. Escriba en la máscara de la red 255 . 255 . 255 . 0 y haga clic en ok. Ver Figura A3.3. 18.
(8) Figura A3.3 Mascara de Red 4. Seleccionamos el dispositivo, la Mac que concuerde con nuestro variador, agregándolo a la lista. Escribimos la IP del dispositivo y clic en ok. Ver Figura A3.4. Figura A3.4 IP PowerFlex40 5. Para finalizar la configuración de manera permanente, espere que aparezca la dirección de la IP y de clic en “Disable BOOTP/DHCP”. Ver Figura A3.5. 19.
(9) Figura A2.5 Disable BOOTP/DHCP Anexo 4 Agregar Variador PorwerFlex40 al Proyecto en Rslogix500 V19.0 1. Luego de tener nuestro proyecto creado en Rslogix5000, damos click derecho sobre el icono (Ethernet) y seleccionamos “Drivers”, buscamos en “Description”. Ver Figura A4.1. Figura A4.1 Driver 2. Buscamos en Drivers PowerFlex40-E, que corresponde con el variador que poseemos y damos clic en ok. Ver Figura A4.2. 20.
(10) Figura A4.2 Variador PowerFlex40 3. Se asigna nombre al dispositivo, a la IP del variador y se da clic en “change”. Ver Figura A4.3. Figura A4.3 Asignación Nombres, IP. 4. Seleccionamos Disable Keying, click en Match Driver. Cuando aparezca la ventana clic en “Partial”. Ver Figura A4.4 21.
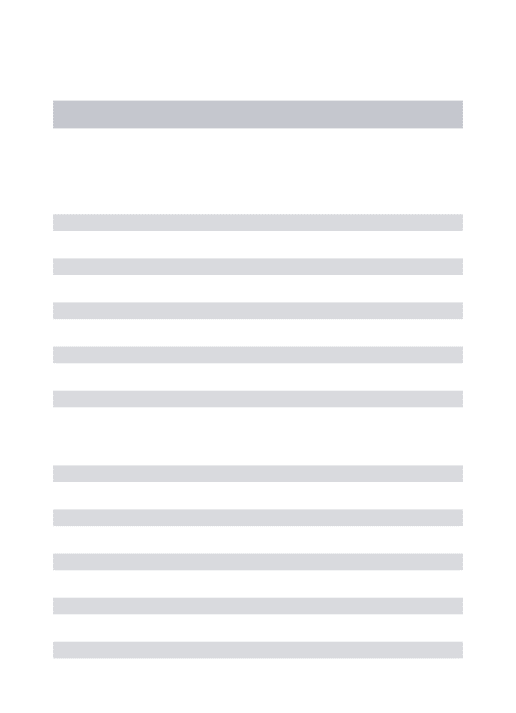
(11) Figura A4.4 Definición Modulo. 5. Esperamos que complete la instalación del driver. Ver Figura A4.5. Figura A4.5 Creación Driver.. 6. Cuando termine la instalación se observa el variador PowerFlex40 y que la instalación ha salido satisfactoriamente instalada. Ver Figura A4.6. 22.
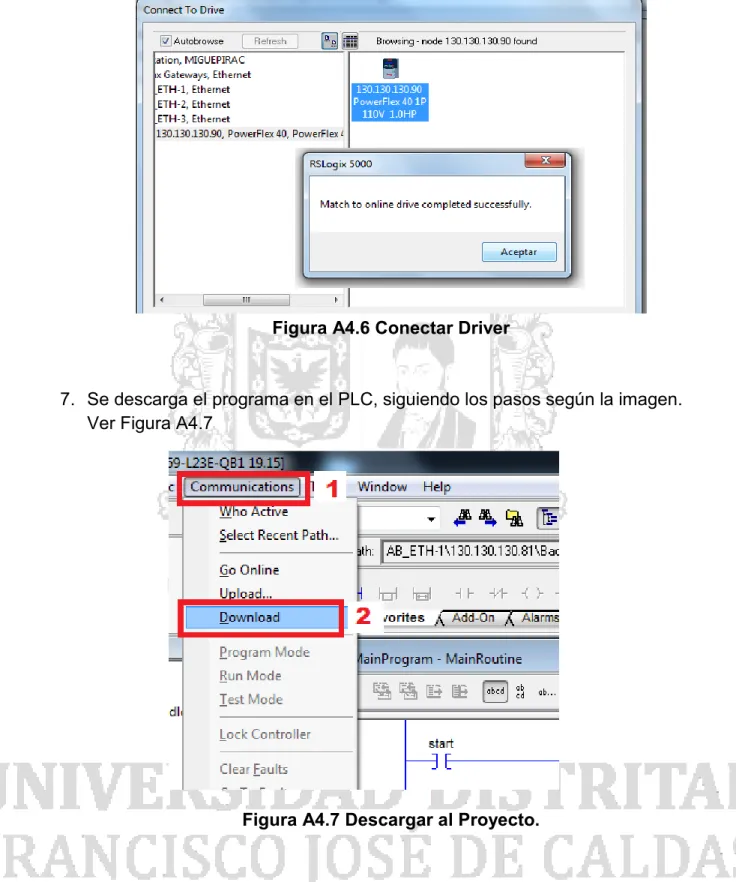
(12) Figura A4.6 Conectar Driver. 7. Se descarga el programa en el PLC, siguiendo los pasos según la imagen. Ver Figura A4.7. Figura A4.7 Descargar al Proyecto.. 8. Luego de haber completado la descarga, nos debe aparecer el variador PowerFlex40, clic derecho sobre la imagen del variador seleccionando. 23.
(13) propiedades y aparecerá una ventana dando clic para conectar con el driver. Ver Figura A4.8. Figura A4.8 Verificación Variador. 9. Seleccionamos el variador y se da clic en ok. Ver Figura A4.9. Figura A4.9 Seleccione PowerFlex40 al Proyecto. 10. Se da clic en “Download”.Ver Figura A4.10. 24.
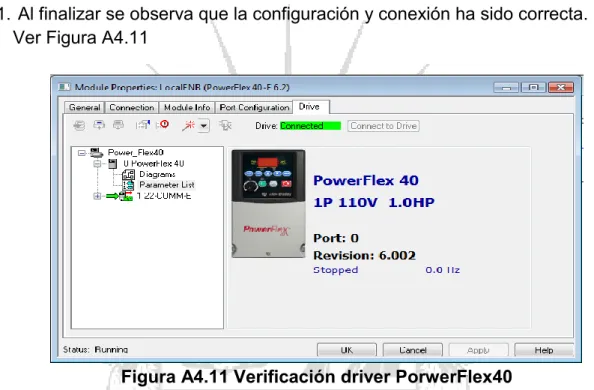
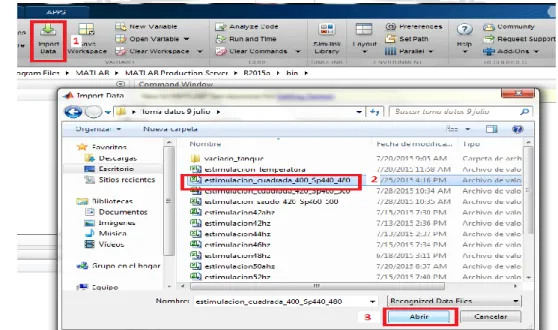
(14) Figura A4.10 Descargue PowerFlex40 al Proyecto.. 11. Al finalizar se observa que la configuración y conexión ha sido correcta. Ver Figura A4.11. Figura A4.11 Verificación driver PorwerFlex40 Anexo 5 Importación de datos a Matlab.Importación de Datos obtenidos por el Trend de Rslogix 5000 (.cvs) a software Matlab. 1. Luego de obtener los datos de vaciado del tanque, se guarda en la carpeta “vaciado_tanque” con el nombre de “Model_Vaciado_tanque_OK.cvs”, en Matlab R2012a importando los datos como se observa a continuación siguiendo los pasos de la Figura A5.1. 25.
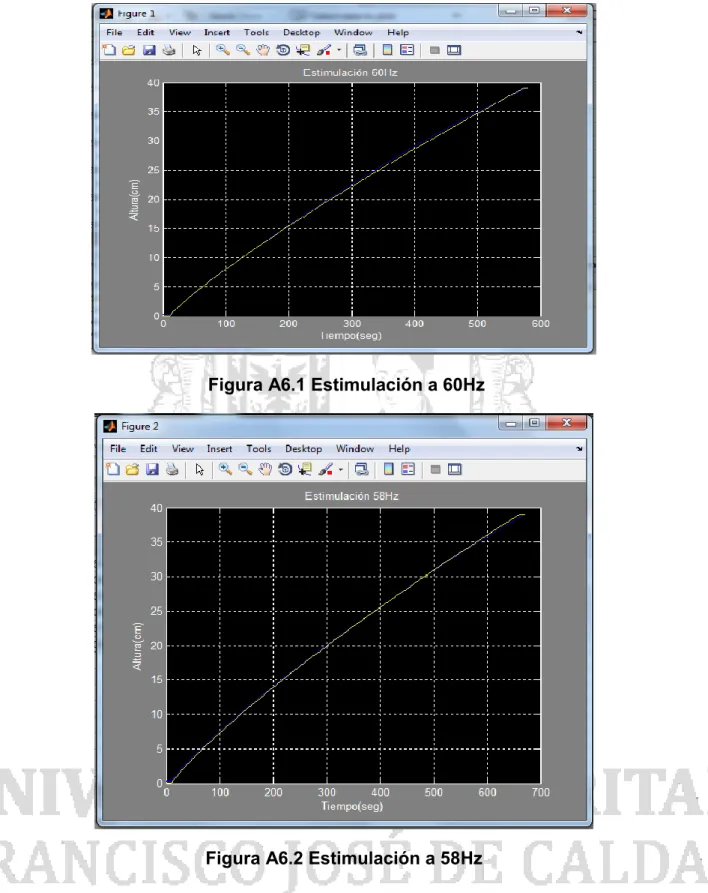
(15) Figura A5.1 2. Se importa al Workspace de Matlab los siguientes datos altura “A_cm” y tiempo “time” como se observa a continuación. Ver Figura A5.2. Figura A5.2 Anexo 6 Estimulación de la Planta Vs Datos Simulados para Nivel Estimulacion a 42Hz a 60Hz, datos reales (azul) simulados (Amarillos).. 26.
(16) Figura A6.1 Estimulación a 60Hz. Figura A6.2 Estimulación a 58Hz. 27.
(17) Figura A6.3 Estimulación a 56Hz. Figura A6.4 Estimulación a 54Hz 28.
(18) Figura A6.5 Estimulación a 52Hz. Figura A6.6 Estimulación a 50Hz 29.
(19) Figura A6.7 Estimulación a 48Hz. Figura A6.8 Estimulación a 46Hz 30.
(20) Figura A6.9 Estimulación a 44Hz. Figura A6.10 Estimulación a 42Hz. 31.
(21) Anexo 7 Paso a Paso de la indentificacion y desarrollo del controlador. Para la realización de la identificación se desarrollaron dos señales mediante el software rslogix5000 una señal cuadrada y una señal seudo, con fin de estimular nuestro sistema en el siguiente punto de estabilización “Anexo, Figura A6.8”, teniendo en cuenta que nuestro tanque es de forma paralelepípedo, bastara con estimularlo en uno de los puntos de estabilización para poder realizar el controlador PID, mediante el método de lugar de las raíces, se diseñó un control PID para cada una de las señales anteriormente mencionadas, para comparar y dejar el que mejor responda para controlar el nivel del tanque. 1. Importar datos estimulación a Matlab 2015ª. Ver Figura A7.1. Figura A7.1 Importar datos de Estimulación. 2. Seleccionamos la entrada (PowerFlex) y la salida (A_Cm). Ver Figura A7.2. 32.
(22) Figura A7.2 Seleccionar entrada y salida. 3. Renombramos las variables importadas para mejor entendimiento Ver Figura A7.3 y Figura A7.4. Figura A7.3 Renombrar Variables. Figura A7.4 Variables renombradas en Workspace 4. Realizar la identificacion mediante la herramienta Ident de Maltab2015a Ver Figura A7.5, como los datos fueron tomados a un tiempo de muestro de 500ms, este mismo tiempo debe ir en “sample time”. 33.
(23) Figura A7.5 Identificacion de los datos obtenidos 5. Luego de importarlos datos, selecionamos “Time plot”, observando la señal de estimulación vs la salida cuadrada obtenida. Ver Figura A7.6 y estimulacion vs la salida seudo obtenida. Ver Figura A7.7. Figura A7.6 Graficas en dominio tiempo cuadrada.. 34.
(24) Figura A7.7 Graficas en dominio tiempo Seudo. 6. Estimación de los diferentes metodos paramétricos sobre la señal cuadrada. Ver Figura A7.8 y estimacion sobre señal seudo Ver Figura A7.9. Figura A7.8 Estimación de metodos paramétricos señal cuadrada. 35.
(25) Figura A7.9 Estimación de metodos paramétricos señal seudo. 7. Exportamos el modelo con la aproximación mas alta para la señal cuadra. Ver Figura A7.10 y para la señal seudo. Ver Figura A7.11. Figura A7.10 Exportar modelo señal cuadrada con porcentaje mas alto.. 36.
(26) Figura A8.71 Exportar modelo señal seudo con porcentaje mas alto. 8. Luego de realizar la estimacion para cada una de las señales, abrimos sisotool(amx441) y sisotool(amx6661). Ver Figura A7.12. Figura A7.12 Sisotool, Planta 37.
(27) 9. Estimulamos mediante señal paso”Step”. Ver Figura A7.13. Figura A7.13 estimulación a una entrada escalón. 10. Respuesta a la estimulación de la señal paso”Step” amx6661”Cuadrada”. Ver Figura A7.14 y paso”Step” amx4441”Seudo”.Ver Figura A7.15. Figura A7.14 Respuesta a una entrada escalón”amx6661”. 38. modelo modelo.
(28) Figura A7.14 Respuesta a una entrada escalón”amx4441”. 11. Diseño de requerimientos, para nuestro controlador, tiempo de estabilización 25 segundos y sobre impulso del 5%.Ver Figura A7.15. Figura A7.15 Diseño de Requerimientos 39.
(29) 12. Agregar 2 polos y 2 ceros según ecuación(55) y los llevamos a la región de diseño. Ver Figura A7.16 ”amx6661” y Figura A7.17 “amx4441”. Figura A7.16 polos y ceros “amx6661”.. Figura A7.17 polos y ceros “amx4441”.. 13. Respuesta del controlador. Ver Figura A7.18 “amx6661” y Figura A7.19 “amx4441” 40.
(30) Figura A7.18 Respuesta del controlador “amx6661”.. 41.
(31) Figura A7.19 Respuesta del controlador “amx4441”. 14. Exportar controlador al Workspace. Ver Figura A7.20 y Figura A7.21. Figura A7.20 Exportar controlador “amx6661”.. 42.
(32) Figura A7.21 Exportar controlador “amx4441”. 15. Función de trasferencia del controlador. Ver Figura A7.22 y Figura A7.23. Figura A7.22 Funcion de trasferencia controlador “amx6661”. Figura A7.23 Funcion de trasferencia controlador “amx4441” 43.
(33) Anexo 8 Las pruebas del controlador de la Figura 66 son las nombradas PID “C”, y las de la Figura 67 PID “C1”.. Figura A8.1 PID “C” Exp1. 44.
(34) Figura A8.2 PID “C” Exp2. Figura A8.3 PID “C” Exp3. 45.
(35) Figura A8.4 PID “C1” Exp1. Figura A8.5 PID “C1” Exp2. Figura A8.6 PID “C1” Exp3 46.
(36) Anexo 9 Explicación paso a paso como cargar nuestro controlador PID a modelo en Simulink, Matlab 2015a 1. Luego de exportar al workspace el controlador según el Anexo 8, Figura A8.21 2. Digitamos en la ventana de comandos pid(C1). Ver Figura A9.1, dando enter obtenemos las caracteristicas del controlador y en Workspace observamos que nos crea una variable de nombre “ans”, formato 1x1 pid. Ver Figura A9.2. Figura A9.1. Figura A9.2 3. renombramos “ans”, colocandole “PID”. Ver Figura A9.3. Figura A9.3. 47.
(37) 4. Con Simulink ya abiert, nuestro controlador ya deiseñado, para no volver a rediseñar nos valemos de la biblioteca de simulink para controladores y del bloque LTI System para agregar nuestro controlador. Ver Figura A9.4. Figura A9.4 5. Damos doble clik sobre el bloque LTI Systema colocando el nombre nuestro controlador. Ver Figura A9.5. Figura A9.5. 48.
(38) Anexo 10 Respuesta del controlador PID Figura 67 en simulink. Set_point”Rojo”, respuesta controlador “Azul”, Graficas realizadas en Matlab2015a. Figura A10.1 Set_point 25 Cm. Figura 10.2 Set_point 5 Cm. Anexo 11 Experimentos Controlador On_Off 1. Para el control de temperatura se observa, que en temperaturas menores a los 40ºC, no hay oscilacion constante sobre el set_point(“Color Rojo”) por los rapidos cambios del sensor para estas temperaturas. Ver Figura A11.1 y Figura A11.2. 2. Para temperaturas mayores de 40ºC, el comportamiento es mas constante, la temperatura, ocsila de manera mas uniforme sobre el set_point (“Color Rojo.”) Ver Figura A11.3. 49.
(39) Figura A11.1. Figura A11.2. 50.
(40) Figura A11.3. Anexo 12 Respuesta del controlador On_Off en simulink. Set_point”Rojo”, respuesta controlador “Azul”, Graficas realizadas en Matlab2015a. Figura A12.1 Set_point 25ºC. 51.
(41) Figura A12.1 Set_point 40ºC. Figura A12.2 Set_point 55ºC. 52.
(42) 53.
(43)
Figure

+7




Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
