BIBLIOTECAS DEL TECNOLÓGICO DE MONTERREY
PUBLICACIÓN DE TRABAJOS DE GRADO
Las Bibliotecas del Sistema Tecnológico de Monterrey son depositarias de los trabajos recepcionales y de grado que generan sus egresados. De esta manera, con el objeto de preservarlos y salvaguardarlos como parte del acervo bibliográfico del Tecnológico de Monterrey se ha generado una copia de las tesis en versión electrónica del tradicional formato impreso, con base en la Ley Federal del Derecho de Autor (LFDA).
Es importante señalar que las tesis no se divulgan ni están a disposición pública con fines de comercialización o lucro y que su control y organización únicamente se realiza en los Campus de origen.
Cabe mencionar, que la Colección de Documentos Tec, donde se encuentran las tesis, tesinas y disertaciones doctorales, únicamente pueden ser consultables en pantalla por la comunidad del Tecnológico de Monterrey a través de Biblioteca Digital, cuyo acceso requiere cuenta y clave de acceso, para asegurar el uso restringido de dicha comunidad.
El Tecnológico de Monterrey informa a través de este medio a todos los egresados que tengan alguna inconformidad o comentario por la publicación de su trabajo de grado en la sección Colección de Documentos Tec del Tecnológico de Monterrey deberán notificarlo por escrito a http://biblioteca.itesm.mx
Modelación y Control Nolineal Mediante Sistemas Difusos
-Edición Única
Title Modelación y Control Nolineal Mediante Sistemas Difusos -Edición Única
Authors Luis Jorge González Ramírez Affiliation ITESM - Campus Monterrey
Issue Date 2001-05-01 Item type Tesis
Rights Open Access
Downloaded 19-Jan-2017 08:02:13
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
CAMPUS MONTERREY
PROGRAMA DE GRADUADOS EN ELECTRÓNICA, COMPUTACIÓN, INFORMACIÓN Y COMUNICACIONES
MODELACIÓN Y CONTROL NOLINEAL MEDIANTE
SISTEMAS DIFUSOS
T E S I S
PRESENTADA COMO REQUISITO PARCIAL
PARA OBTENER EL GRADO ACADÉMICO DE:
MAESTRO EN CIENCIAS EN AUTOMATIZACIÓN
ESPECIALIDAD EN SISTEMAS ÍNTEUGENTES
LUIS JORGE GONZÁLEZ RAMÍREZ
Modelación y Control Nolineal Mediante
Sistemas Difusos
Por
Ing. Luis Jorge González Ramírez
TESIS
Presentada a la División de Electrónica, Computación, Informática y Comunicaciones Este trabajo es requisito parcial para obtener el grado académico de Maestro en
Ciencias en Automatización con Especialidad en Sistemas Inteligentes
Instituto Tecnológico y de Estudios Superiores de Monterrey
Campus Monterrey
Instituto Tecnológico y de Estudios Superiores de
Monterrey
División de Graduados en Electrónica, Computación,
Informática y Comunicaciones
Dirección de Programas de Posgrado en Electrónica, Computación, Informática y Comunicaciones
Los miembros del comité de tesis recomendamos que la presente tesis de Luis Jorge González Ramírez sea aceptada como requisito parcial para obtener el grado
académico de Maestro en Ciencias en Automatización, especialidad en:
Sistemas Inteligentes
Comité de tesis:
Dr. Rogelio Soto Asesor de la tesis
M.C. Francisco Palomera Palacios Sinodal
Dr. Carlos Scheel Mayenberger Director del Programa de Graduados
en Electrónica, Computación, Informática y Comunicaciones
A Dios, por haberme permitido lograr una meta más de mi vida.
A mis padres Ma. de Jesús y Jorge González, por haberme brindado el apoyo y la oportunidad para decidir mis propósitos.
A mis hermanos Oscar y Saúl, que me inspiran a ser su modelo a seguir. A mis abuelos, que siempre me brindan su cariño y apoyo incondicional.
A mis tíos y primos, por todo su apoyo y entusiasmo.
A la memoria de Miguelito, que desde el cielo sigue en nuestros corazones. A todos aquellos que han estado conmigo en las buenas y en las malas a pesar de la
Reconocimientos
Deseo expresar mi más sincero agradecimiento a todas las personas y dependencias que hicieron posible este trabajo de tesis:
Al Dr. Rogelio Soto, por sus valiosos consejos en el transcurso de la investigación. Al Dr. Hugo Terashima Marín y al M.C. Francisco Palomera Palacios, por su minuciosa revisión de este trabajo, por su orientación y sugerencias.
Al Dr. Francisco Cantú, por brindarme la oportunidad de trabajar en el Centro de Inteligencia Artificial.
Al Centro de Inteligencia Artificial, por facilitarme el uso de sus recursos e insta-laciones.
Al enlace ITESM-CONACYT, por el apoyo y financiamiento de mis estudios de posgrado.
A toda mi familia en general, por su apoyo moral en todo momento.
A todos mis compañeros, que siempre me apoyaron y me motivaron a seguir ade-lante.
Luis
JORGE GONZÁLEZ RAMÍREZModelación y Control Nolineal Mediante
Sistemas Difusos
Luis Jorge González Ramírez, M.C.
Instituto Tecnológico y de Estudios Superiores de Monterrey, 2001
Asesor de la tesis: Dr. Rogelio Soto
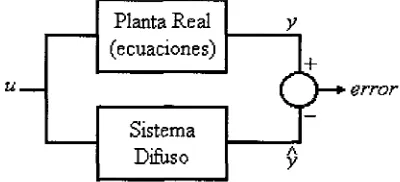
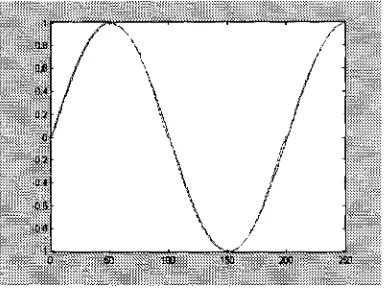
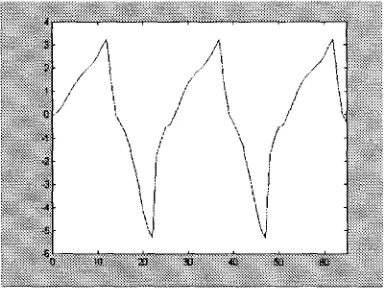
En este documento se presenta un esquema de Modelación y Control Nolineal mediante Sistemas Difusos como algoritmo de control de un proceso monovariable y otro multivariable de dos entradas dos salidas. Las diferentes entradas de referencia (escalón, diente de sierra, senoidales, y cuadráticas) hacen que el sistema tenga características de regulación y seguimiento.
En primera instancia se propone la Modelación Difusa directa e inversa de una planta monovariable y otra multivariable de dos entradas dos salidas representadas por ecuaciones de diferencia mediante el método de Mínimos Cuadrados Recursivos. La idea se enfoca principalmente en aportar una buena herramienta para la implementación de los simuladores que son de gran ayuda para una aplicación eficiente de módulos tales como los de planeación, capacitación y control.
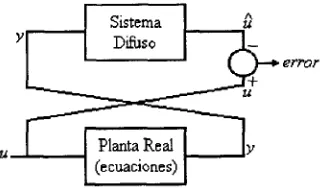
En segunda instancia, se diseña una ley de Control Robusto conocido como algo-ritmo de control de Modo Deslizante, y es aquí donde se justifica el hecho de identificar el modelo inverso el cual se emplea principalmente con el fin de tener una estimación
índice General
Reconocimientos v
Resumen vi
índice de Figuras ix
Capítulo 1 Introducción 1
1.1 Contexto de la Investigación 1 1.2 Definición del Problema 4 1.3 Objetivos 5 1.4 Hipótesis 5 1.5 Aportaciones de la Investigación 6 1.6 Antecedentes 7 1.6.1 Lógica Difusa 8 1.6.2 Análisis Comparativo Entre el Control de Estructura Variable y el
Control Adaptable, para su Aplicación en el Control de Posición de un Robot Manipulador 12 1.6.3 Aplicación de Lógica Difusa para control de temperaturas en un
alimentador de vidrio 13 1.6.4 Diseño e Implementación de un Controlador Difuso - Neuronal
para un Generador Sincrónico 14 1.6.5 Identificación de Modelos Difusos Tipo Sugeno Aplicando
Dis-cretización Difusa y Estimación Ortogonal de Parámetros . . . . 16 1.7 Explicación de Capítulos 17
Capítulo 2 Modelación y Control Nolineal 18
2.1 Modelación Difusa 18 2.1.1 Construcción de un Modelo Matemático 18 2.1.2 Identificación de sistemas 19 2.1.3 Estimación Difusa Empleando Mínimos Cuadrados Recursivos . 20 2.2 Control en Modo Deslizante 22 2.2.1 Control Robusto 22
2.2.2 Control Deslizante 23 2.2.3 Controlador Basado en Conocimiento Difuso (FKBC) en Modo
Deslizante 24 2.2.4 Superficie de Deslizamiento y Control Equivalente 24 2.2.5 Suavizamiento de la Manipulación Empleando la Función
Satu-ración 27
Capítulo 3 Diseño, Experimentación y Resultados 30
3.1 Modelación 30 3.1.1 Modelación Directa Planta Monovariable 30 3.1.2 Modelación Inversa Planta Monovariable . 32 3.1.3 Modelación Directa Planta Multivariable 34 3.1.4 Modelación Inversa Planta Multivariable 37 3.2 Control Nolineal 39 3.2.1 Control con Modo Deslizante Planta Monovariable 40 3.2.2 Control con Modo Deslizante Planta Multivariable 43 3.2.3 Control con Modo Deslizante Planta Multivariable ante
Diferen-tes Entradas de Referencia 47
Capítulo 4 Conclusiones y Recomendaciones a Futuro 51
4.1 Conclusiones de la Modelación Difusa 51 4.2 Conclusiones del Modo Deslizante Difuso 52 4.3 Recomendaciones para Futuros Trabajos 53
Bibliografía 55 Vita 58
índice de Figuras
1.1 Esquema General de la Teoría Difusa 3 1.2 Controlador simple de temperatura 9 1.3 Conjuntos difusos convencionales 10 1.4 Proceso difuso de inferencia 11 2.1 Castañeo a Causa de la Conmutación de Control Imperfecta 27 2.2 Ancho de la Franja a lo Largo de la Línea de Conmutación 28 2.3 Interpolación de Control en la Franja de Conmutación 28 3.1 Diagrama a Bloques de la Identificación Directa 31 3.2 Respuesta de la Planta Nolineal Monovariable 31 3.3 Identificación Difusa Planta Monovariable 32 3.4 Diagrama a Bloques del Entrenamiento Inverso 33 3.5 Respuesta Inversa de la Planta Nolineal Monovariable 33 3.6 Identificación Inversa Difusa Planta Nolineal Monovariable 34 3.7 Sistema Difuso Múltiple Entrada una Sola Salida 35 3.8 Salida Directa Multivariable ler. Salida 35 3.9 Salida Directa Multivariable 2da. Salida 36 3.10 Identificación Directa Multivariable ler. Salida 37 3.11 Identificación Directa Multivariable 2da. Salida 37 3.12 Salida Inversa Multivariable ler. Salida 38 3.13 Salida Inversa Multivariable 2da. Salida 38 3.14 Identificación Inversa Multivariable ler. Salida 39 3.15 Identificación Inversa Multivariable 2da. Salida 39 3.16 Diagrama de Bloques Modo Deslizante Planta Univariable 40 3.17 Comportamiento del Sistema Monovariable ante una Senoidal 41 3.18 Tamaño de la Alteración Inicial del Sistema. 41 3.19 Respuesta del Sistema Monovariable mas una Alteración Inicial 42 3.20 Respuesta del Sistema ante un cambio de parámetros de la Planta. . . . 43 3.21 Diagrama de Bloques Modo Deslizante Planta Multivariable 44 3.22 Comportamiento del Sistema Multivariable ante una Senoidal 44 3.23 Comportamiento del Sistema Multivariable ante una Cosenoidal 45
Capítulo 1
Introducción
1.1 Contexto de la Investigación
En años recientes, los controladores digitales han sido de gran utilidad dentro de los sistemas de control. Estos se han empleado para alcanzar el desempeño óptimo, por ejemplo, en la forma de productividad máxima, máximo beneficio, mínimo costo o el consumo mínimo de energía.
La aplicación de control con interfaces gráficas por computadora, recientemente ha hecho posible el movimiento inteligente en robots industriales, la optimización en la economía de combustible para automóviles y el refinamiento en la operación de enseres y dispositivos de uso doméstico, tales como hornos de microondas, máquinas de cocer entre otros. La capacidad en la toma de decisiones y la flexibilidad en los programas de control son las mayores ventajas de los sistemas de control digital [29].
La tendencia actual de controlar los sistemas dinámicos en forma digital en lugar de analógica se debe principalmente a la disponibilidad de computadoras digitales de bajo costo y a las ventajas de trabajar con señales digitales en lugar de señales en tiempo continuo.
La Lógica Difusa ha demostrado ser una herramienta muy eficiente para el de-sarrollo de estructuras digitales y sistemas que utilizan conocimiento empírico [21]. El conocimiento empírico por lo general proviene de un experto y se representa de cierta manera difusa, es decir, que no se puede medir ni cuantificar tan fácilmente. Un ejem-plo de este tipo de conocimiento es el que determina el desempeño de un proceso, y lo califica como bueno, malo, regular, óptimo, productivo, perjudicial, ineficiente, positi-vo, negatipositi-vo, etcétera. Es por eso que existe la necesidad de desarrollar metodologías aptas para tomar en cuenta todo este tipo de cuestiones que son difíciles de interpretar con sistemas conocidos como los convencionales.
Los sistemas convencionales generalmente han sido empleados para la automati-zación de procesos, pero con la demanda de nuevas tecnologías, se han limitado de cierta forma por la complejidad de nuevos modelos. Considerando ciertas similitudes
y diferencias entre los sistemas convencionales y los sistemas difusos. Se tiene por principio de cuentas de manera similar que ambos tratan de resolver el mismo tipo de problemas. Por mencionar algo, se tienen las dificultades de monitoreo tales como esta-bilidad y desempeño. También, las herramientas matemáticas empleadas para analizar los métodos de control son parecidas, ya que se están estudiando los mismos puntos en cuestión (estabilidad, convergencia, etc.).
Finalmente, la principal diferencia entre el control convencional y difuso es que el con-vencional comienza con una muestra matemática del proceso mientras que el punto de partida del control difuso generalmente es por medio de heurísticas y conocimiento humano (en términos de reglas Si - Entonces).
Del punto anterior, notamos que la información usada para construir los dos tipos de controladores no es la misma. Sin embargo, los controladores difusos avanzados pueden hacer uso tanto de heurísticas como de modelos matemáticos lineales y nolinea-les. No obstante, para diferentes casos en un ambiente real (por ejemplo, un proceso de control industrial), no es tan factible obtener, ni contar con un modelo matemático simple y acertado. El control difuso es muy práctico para este tipo de problemas, y con una buena aplicación de heurísticas puede lograrse un mejor desempeño [31]. Si el modelo matemático del proceso es total o parcialmente desconocido, mediante la expe-riencia o un historial de patrones, se pueden diseñar modelos y controladores difusos de una manera sistemática garantizando un desempeño favorable.
La Lógica Difusa ha sido considerada tradicionalmente como una teoría para hacer frente a sistemas complejos que manejan incertidumbre. Una perspectiva moderna complementaria es ver esta técnica como una ciencia de aproximación. Este punto de vista trae a la superficie el repunte de la teoría en lo que se refiere a la interacción de costo y precisión. Ciertamente cada aplicación puede notar potencialmente algunos de los beneficios, por mencionar algo se tiene el desempeño, simplicidad, bajo costo y productividad [32].
Según la literatura, dentro de la industria existen ciertos obstáculos referentes a una amplia exploración del potencial de las técnicas difusas. Se necesita ampliar el campo de diseño de cierta manera más sistemática, además de una metodología de análisis para más aplicaciones de control [9].
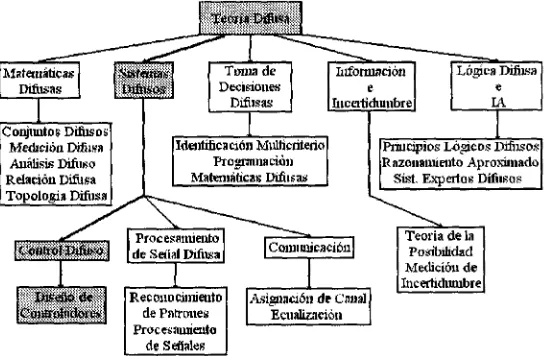
La Figura 1.1 muestra un esquema general de la teoría difusa. La idea es represen-tar gráficamente lo que comprenden los sistemas difusos, ya que es bajo este contexto donde se da la aportación de la tesis. Una vez determinada la línea de investigación, lo que se implementa es un algoritmo de control nolineal diseñado mediante sistemas difusos. La base de la aplicación, es la modelación de un proceso monovariable y multivariable nolineal representados por ecuaciones de diferencia. En este caso se des-conocen las características físicas reales de la planta, pero la forma de las funciones se asemejan a las dinámicas de procesos conocidos. El método para la identificación de los parámetros difusos fue el de los Mínimos Cuadrados Recursivos, el cual ajusta los parámetros mediante una acción recursiva definiendo los coeficientes adecuados que generan un mínimo error o desviación entre el modelo y los datos reales, que en este caso se generan del modelo.
Conjuntos Diusos Medición Difusa Análisis Difuso Relación Difusa Topología Difusa Identificación Multicriteria Programación Matemáticas Difusas
Principios Lógicos Difusos Rnzoiiauneiito Aproximado
Sist, Expertos Difusos
CiMttoiiiíforis,
1
de Señal MusaProcesamiento1
Reconocimiento de Pntroues Procesamiento
de Señales
I Comunicación I
Asignación de Canal Ecualizacioii
[image:16.627.200.472.348.526.2]Teoría de la Posibilidad Medición de Iucertidnnibre
Figura 1.1: Esquema General de la Teoría Difusa
variable se ocupa como herramienta para aproximar el valor adecuado de la señal de control en cierta condición de la planta, y sirve para complementar un control robusto el cuál genera una ley de control adecuada y computacionalmente factible en tiempo real conocida como Control de Modo Deslizante.
1.2 Definición del Problema
En la actualidad existen sistemas en diferentes campos de la ciencia como la in-geniería, la medicina, la economía, que por su complejidad natural, han dificultado su modelación y análisis matemático, así como su control. La aplicación de técnicas tradicionales de control clásico y moderno para sistemas lineales, las cuales se basan en el uso de la función de transferencia y el espacio de estado, respectivamente, no han generado resultados satisfactorios en la modelación y control de sistemas complejos. La complejidad en dichos sistemas se presenta principalmente por comportamientos nolineales en alguno de sus elementos y por el uso de cierta heurística humana en su operación. Una alternativa importante, denominada como el control inteligente, ha sido desarrollada y utilizada para facilitar la solución a los problemas antes mencionados. Este tipo de control intenta mejorar algunas de las metodologías utilizadas en el diseño de controladores convencionales del tipo proporcional integral derivativo (PID) indus-trial, así como en controladores no convencionales tales como los óptimos, los robustos y nolineales, para así ayudar a resolver los problemas que se presentan en la modelación y el control de sistemas complejos.
Como disciplina, el control inteligente es el conjunto de teorías y prácticas cuyos atributos pretenden emular características importantes de inteligencia humana. Dichas cualidadess incluyen adaptación y aprendizaje, planeación ante cierto grado de incer-tidumbre y la manipulación de un gran número de datos [2].
El problema es, en el caso particular de este trabajo, diseñar un sistema difuso para predecir el comportamiento dinámico de procesos. Dicha aproximación se da sobre la base de un modelo monovariable y otro multivariable representado por un arreglo de ecuaciones de diferencia que genera pares de datos de entrada-salida. Dicha modelación aporta de cierta forma una nueva aplicación acerca de modelación difusa dentro del grupo de control inteligente del Centro de Inteligencia Artificial, la cual de acuerdo con la reseña histórica de la sección 1.6, no ha sido muy explorada.
aportación en la parte de control nolineal, ahora en una nueva modalidad de control de modo deslizante difuso.
Por último, la idea general es aportar una plataforma inicial de investigación que permita a estudios posteriores mejorar y ampliar el método, comparando ventajas y desventajas con respecto a otras técnicas. La demanda actual reclama procesos los cuales sean realmente productivos y rentables, además de cumplir con las más estrictas normas de calidad que actualmente se exigen en el mercado.
1.3 Objetivos
En primera instancia, se ha diseñado un sistema difuso que representa y predice el comportamiento dinámico de procesos, así como también explica las interacciones y relaciones entre entradas y salidas de un sistema. En segunda instancia, se ha desarro-llado un algoritmo que cuenta con un esquema de control nolineal de modo deslizante difuso para una planta monovariable y otra multivariable de dos entradas dos salidas. El punto principal es que se prueba la modelación inversa difusa como herramienta de diseño para una nueva ley de control robusto.
El alcance de la tesis se ha centrado en el desarrollo de un controlador de modo deslizante difuso capaz de controlar un proceso nolineal monovariable y multivariable ante diferentes tipos de entrada de referencia para regulación y seguimiento. Dicha implementación se lleva a cabo con herramientas de simulación tales como Matlab y su "toolbox" de "Sistemas Difusos" y "Simulink". Las circunstancias de tiempo y acceso al equipo de laboratorio, fueron una limitante para desarrollar un proyecto práctico en forma real.
Dado este enfoque, se diseñó un procedimiento que abarca la modelación y el control nolineal mediante sistemas difusos. De aquí surgen ideas y recomendaciones las cuales sirven para que un estudio posterior mejore el método propuesto comparan-do ventajas y desventajas con respecto a otras técnicas. La plataforma principal de aplicación fue una planta monovariable y otra multivariable nolineal representadas por ecuaciones de diferencia.
1.4 Hipótesis
un sistema convencional es casi imposible de alcanzar. Es posible el uso de Lógica Di-fusa, en primera instancia, para la estimación de parámetros del modelo real, y obtener la estimación del parámetro original de entrada del sistema. El aproximador que se propone es el de mínimos cuadrados recursivos, el cual se basa en la suposición de ajustar la salida de los conjuntos difusos para la identificación. En segunda instancia, con la aplicación del control de modo deslizante, se puede diseñar un algoritmo de con-trol difuso, mediante a la modelación inversa, para la óptima convergencia del sistema nolineal tanto para regulación y seguimiento.
1.5 Aportaciones de la Investigación
Fundamentalmente, tomando en cuenta las preguntas que nacieron originalmente de la propuesta de investigación, y además las que se resolvieron en el transcurso del desarrollo de la tesis, se consideran las siguientes. En primera instancia con respecto a la relevancia social el cuestionamiento de ¿Quién o quienes se benefician con los resultados de la investigación?. En segunda instancia, como valor teórico, saber si se llena algún hueco de conocimiento, y lo que se espera entender con los resultados que no se conocieran anteriormente, es decir, ¿Qué es lo nuevo?. También, de aquí surgen implicaciones para decir si ¿Es ésto útil para resolver algún problema práctico?. Finalmente, esto conlleva a considerar la utilidad metodológica, preguntándose, si puede ayudar a la creación de un nuevo instrumento para analizar o interpretar datos.
Las contribuciones dentro de esta investigación son las que se encargan de respon-der a los cuestionamientos propuestos en el caso de estudio, y particularmente muestran lo siguiente:
• Este trabajo representa el primer esfuerzo dentro del área de investigación de control inteligente del Centro de Inteligencia Artificial por diseñar y desarrollar controladores nolineales tanto univariables como multivariables dentro del ámbito de Sistemas Difusos con Modo Deslizante.
• Se tiene la innovación en la estimación del parámetro (ü) de la ley de control a través de la modelación inversa de la planta mediante sistemas difusos.
1.6 Antecedentes
A causa del progreso de teorías de control automático y tecnología, durante los últimos 60 años, numerosos procesos técnicos operan automáticamente bajo ciertas condiciones de proceso. Hay una gran variedad de diseños y acercamientos de imple-mentación para una propagación hacia el frente ininterrumpida y control de retroali-mentación. Existe también control de secuencia para cualquier tipo de procesos con diversos comportamientos. La mayoría de los algoritmos en controladores, están basa-dos en herramientas matemáticas y lógica booleana, estos son adecuabasa-dos para resolver en su mayor parte los problemas de control de una manera íntegra. El desarrollo de la teoría de Lógica Difusa ha estimulado caminos alternos para resolver problemas de control automático ambiguo [18].
Hasta ahora, dentro del grupo de control inteligente del Centro de Inteligencia Artificial, se han desarrollado investigaciones, las cuales han sido consideradas cómo aportaciones con un amplio contenido de técnicas diversas de IA. Haciendo una breve reseña histórica sobre dichos campos se tiene:
• Control Nolineal, donde en 1992, se llevó a cabo el Análisis Comparativo Entre
el Control de Estructura Variable y el Control Adaptable, para su Aplicación en el Control de Posición de un Robot Manipulador [28], [27]. Algunos otros trabajos relacionados en el área de control nolineal dentro del grupo de control inteligente son los desarrollados por Francisco García Córdoba [11] acerca del control de modo deslizante para motores de inducción usando superficie de conmutación nolineal, Fernando Navarro [26] referente al Análisis de Estabilidad y Diseño de Sistemas de control de estructura variable difusos, Raúl Rubio Quintero [30] respecto al Diseño de un controlador de estructura variable difuso para el control de velocidad y flujo magnético de un control de inducción, Jorge Alvarez Ramírez [1] que se refiere al diseño de superficies de conmutación para el modo deslizante, Carlos Hernández Ibarra [16] con la implementación de un control de posición de un motor de corriente directa por el método de control deslizante, finalmente Eduardo Gamero Inda [10] con su aportación de sistemas de control de velocidad para un motor de inducción usando el método de modo deslizante óptimo. • Controladores Difusos Tipo PID, donde en 1996, el trabajo realizado sobre
controladores difusos se tienen las aportaciones de Juan Carlos Morales [25] acerca de la autosintonía de controladores PID usando Lógica Difusa aplicado a una secadora industrial, Martín Gutiérrez Delgado [15] con la modelación y control difusa de un prototipo a escala de una grúa de techo, Antonio Erasto Castillo [8] respecto al control difuso de la posición de un balín en el sistema, llamado balín-riel, por último Jesús Antonio Baez [5] referente al diseño y desarrollo de un control difuso para un generador síncrono.
• Control Inteligente, donde en 1996, se presentó el Diseño e Implementación
de un Controlador Neurodifuso para un Generador Sincrónico [7], [6]. Por men-cionar alguna otra aplicación dentro del campo se tienen las de Marco Tulio Mata [22] acerca de la síntesis de linealización por realimentación y control de estructura variable con compensación de una red neuronal de retropropagación, Mauricio Eduardo Meléndez [24] respecto al control fuzzy auto-organizable, fi-nalmente Gerardo Mejía Cantú [23] con la identificación de sistemas dinámicos mediante redes neuronales.
• Modelación Difusa, donde en 1998, la aportación correspondió a la
Identifi-cación de Modelos Difusos Tipo Sugeno Aplicando Discretización Difusa y Esti-mación Ortogonal de Parámetros [12].
El trabajo de esta tesis propone la aportación dentro del campo de acción de modelación y control nolineal difuso. Además, intenta conducir a un nuevo esquema el cual engloba la técnica del modo deslizante hacia un nuevo horizonte de modo deslizante difuso. Cabe destacar que es una nueva aplicación dentro del campo de modelación difusa la cual por la reseña histórica es evidente que no se ha participado del todo en ese ámbito.
A continuación, se presenta una pequeña explicación referente a lo que se refiere Lógica Difusa basándose en un ejemplo práctico de un termostato controlador de un abanico calefactor [33]. Además, se narra de manera más detallada cada una de las aportaciones mencionadas en la reseña histórica del grupo de control inteligente del centro de IA.
1.6.1 Lógica Difusa
La Lógica Difusa es considerada una poderosa metodología para la resolución de problemas, con un gran número de aplicaciones en cuestiones de control y proceso de información. Esta herramienta facilita la forma de obtener conclusiones de información ambigua, difusa, indefinida o imprecisa. En un sentido, la Lógica Difusa asemeja la
toma de decisiones con su habilidad para trabajar con datos aproximados y encontrar soluciones precisas [20].
A diferencia de la lógica clásica la cual requiere un claro entendimiento de un sistema, ecuaciones exactas, y valores numéricos precisos, la Lógica Difusa reúne alter-nativas de puntos de vista, los cuales permiten modelar problemas complejos emplean-do un alto nivel de abstracción que se origina del conocimiento y de la experiencia. Además, concede la expresión del conocimiento en conceptos lingüísticos tales como muy caliente, rojo claro, muy corto, muy largo, mucho tiempo, etc., y los cuales son mapeados en rangos numéricos exactos.
Para algunos conceptos básicos en Lógica Difusa se recomienda tomar en cuenta un ejemplo simplificado de un termostato controlador de un abanico calefactor el cual se ilustra en la Figura 1.2 [33]. La temperatura de la recámara detectada a través de un sensor es la entrada al controlador cuyas salidas son hacia un control de fuerza para ajustar la velocidad del ventilador.
Velocidad abanico
Controlador
t_
Recámala
Abanico
Temperatura
Figura 1.2: Controlador simple de temperatura
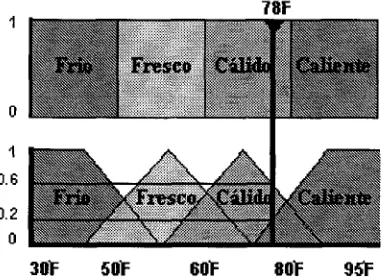
Un termostato convencional trabaja como si fuera un switch de encendido y apa-gado (Figura 1.3). Si se ajusta a una temperatura de 78°F, entonces el calefactor se activa solamente cuando la temperatura cae por debajo de 75°F. Al alcanzar una tem-peratura de 81°F, el calefactor se apaga. Como resultado, la temperatura deseada de la recámara o del alojamiento de calor, será muy cálido o muy caliente.
Un termostato difuso trabaja en tonos obscuros donde la temperatura es tratada como una serie de traslapes de rangos. Por ejemplo, 78°F se considera un 60% cálido, y 20% caliente. Aquí el controlador se programa con reglas simples "Si - Entonces" las cuales indican al abanico que tan rápido debe girar. Consecuentemente, cuando la temperatura cambia, la velocidad del ventilador se ajustará continuamente con el fin de mantener la temperatura al nivel deseado.
El primer paso para diseñar tal controlador difuso es determinar el rango de valores para la entrada y la salida de variables del controlador. Después, se asignan niveles
78F
0.6
0.2
_
-'/
Fresco
/ \
\ /
Cüüo
v
)»
*\
[image:23.616.234.425.53.193.2]30Í 50f 801F 9ÍF
Figura 1.3: Conjuntos difusos convencionales
tales cómo "Frío" para la temperatura y "Alto" para la velocidad del ventilador. Se escribe un conjunto de instrucciones simples, como si se escribiese en nuestro lenguaje natal, para controlar el sistema. Dentro del controlador, todas las acciones para la regulación de temperatura serán basadas en la forma de cómo la temperatura actual cae dentro de estos rangos, y las reglas describirán el comportamiento del sistema. La salida del controlador variará constantemente para ajustar la velocidad del abanico.
La temperatura del controlador descrito anteriormente puede ser definida en cua-tro simples reglas.
• Si la temperatura es "fría" Entonces la velocidad del abanico es "alta".
• Si la temperatura es "fresca" Entonces la velocidad del abanico es "media".
• Si la temperatura es "cálida" Entonces la velocidad del abanico es "baja".
• Si la temperatura está "caliente" Entonces la velocidad del abanico es "cero".
En este caso las variables lingüísticas fresco, cálido, alto, bajo. Son etiquetas las cuales se refieren al conjunto de valores de traslape mostrados en la Figura 1.3. Estos valores triangulares son llamados funciones de membresía.
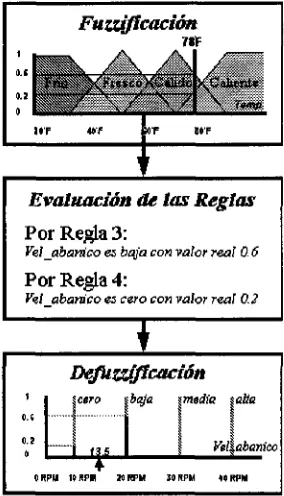
El controlador difuso trabaja de manera similar a un sistema convencional. Acepta un valor de entrada, efectúa algunas operaciones, y genera un valor de salida. A este proceso se le conoce como proceso de inferencia difuso, y se define principalmente en tres pasos ilustrados en la Figura 1.4:
1. Fuzzificación donde una entrada de señal nítida es traducida a un valor difuso. 2. Evaluación de las reglas donde los valores verdaderos o reales de la salida difusa
son computados.
3. Defuzzificación es donde la salida difusa se traduce nuevamente a un valor de señal nítida.
Purificación
Callen*
MT 4»f CF Wf
Evaluación de las Regías
Por Regla 3:
Vel abanico es baja con valor rea! 0.6 Por Regla 4:
Vil abanico es cero con valor real 0.2
1
Defuz&flcación¡cero í^aja -¡media taita
[image:24.614.264.406.96.344.2]0 RPM 1( RPM 20 RPM 30 RPM M RPM
Figura 1.4: Proceso difuso de inferencia
Dentro del proceso de Fuzzificación, el valor nítido de temperatura de 78°^ es la entrada, y es traducida a valores verdaderos difusos. Para este ejemplo, los 78°F son Fuzzificados a cálido con un valor real de 0.6 o 60%, y caliente con un valor de 0.2 o 20%.
Durante la evaluación de las reglas, el conjunto completo es evaluado y algunas instrucciones pueden ser ejecutadas. Para 78°F solamente las dos ultimas de las cua-tro serán puestas en operación. Específicamente, empleando la regla número tres, el abanico se disminuirá con un grado de verdad de 0.6. Simultáneamente, utilizando la regla número cuatro, la velocidad del ventilador será de cero con un valor real de 0.2.
En el transcurso de la Defuzzificación, el 60% se puede interpretar aplicando un método de cálculo llamado centro de gravedad (COG) con el fin de producir la señal de salida nítida de 13.5 RPM para la velocidad del abanico.
Las estrategias de control lógico difuso pueden tener una amplia variedad de apli-caciones. Por mencionar algunas dentro de procesos industriales tenemos:
• Lógica Difusa en hornos de cemento y plantas de incineración [17]. • Lógica Difusa para refinación, destilación y otros procesos químicos [20].
1.6.2 Análisis Comparativo Entre el Control de Estructura
Variable y el Control Adaptable, para su Aplicación en
el Control de Posición de un Robot Manipulador
Este trabajo describe un experimento computacional con el fin de realizar una comparación del desempeño de dos controladores diferentes al controlar el seguimiento de una trayectoria predefinida de un robot de tres grados de libertad [28]. La idea prin-cipal fue poner frente a frente un control de estructura variable y un control adaptable, trabajando en el control de un mismo robot, bajo las mismas condiciones de operación, y poder proveer así de elementos de información al diseñador de algoritmos de control al momento de trabajar en una aplicación específica.
Esta investigación trata de exponer un ejemplo más detallado acerca del diseño de estos controladores, ya que aunque muchos autores dentro de la literatura presentan en sus publicaciones desarrollos matemáticos y resultados de simulaciones, no es usual que se indique en ellas la manera de programar dichos algoritmos de control que constituyen los controladores, y mostrar más a detalle las ecuaciones de los mismos.
Al mismo tiempo, el diseño de los controladores se expone de manera tal que sirve de guía para el diseño de controladores de estructura variable y adaptables, para ser usadas en otro tipo de aplicaciones ajenas al control de robots.
Todo partió de un modelo matemático de un robot de tres grados de libertad, el cuál sirvió de pieza fundamental en el desarrollo de la aplicación. Para la obtención del modelo, se utilizaron las ecuaciones de movimiento de Lagrange.
El siguiente paso fue llevar a cabo el diseño de los controladores cuyo desempeño se evaluó en el caso de estudio. Para el diseño correspondiente, se elaboró primeramente el control de estructura variable para el robot de 3 grados de libertad. Enseguida, se efectuó el control adaptable para el mismo robot, y finalmente se analizaron ciertos aspectos interesantes concernientes a la sintonía de ambos tipos de controladores, y se procedió con la sintonización de los mismos, para pasar después a la etapa de simulación y obtención de resultados.
Dentro de la simulación, se describe más que nada la manera de imitar las condi-ciones de operación a que se enfrentan los diferentes tipos de controladores, y se ela-boran los modelos de simulación del robot, los dos controladores y los sistemas de interconexión entre ellos. Los resultados muestran la calidad de desempeño de los con-troladores, ante la presencia de incertidumbres en el conocimiento de los parámetros del robot.
En este estudio particular, el control adaptable presentó una mayor robustez ante la incertidumbre paramétrica de la carga del robot. En el caso del control de estructura variable, proporcionó una acción de control más suave que la del control adaptable, lo cual en un ambiente real, disminuye el desempeño del adaptable, y por consiguiente, aumenta el error de seguimiento. Al parecer se cumplió de mejor manera el objetivo de control en el caso del control adaptable.
1.6.3 Aplicación de Lógica Difusa para control de
temperatu-ras en un alimentador de vidrio
Esta es una aplicación práctica de un control de temperatura usando técnicas de Lógica Difusa, para mejorar los esquemas de control y minimizar retrasos de operación dentro de un alimentador de vidrio [13].
El control de temperatura en alimentadores de vidrio se ha llevado a cabo desde un tiempo atrás con los conocidos controladores PID (Proporcional, Integral y Deriva-tivo). Las características de este proceso son principalmente constantes de tiempo y retrasos muy grandes, mayores a un minuto. Debido a los nuevos esquemas de com-petencia internacional, se observa que las corridas de producción son cada vez más cortas y variadas, que en ocasiones se efectúan hasta tres cambios en un mismo día. Estas variaciones del proceso provocan mayor o menor extracción de vidrio del ali-mentador y consecuentemente cambios frecuentes en la sintonización del controlador. Entre más tardado sea el proceso de sintonización, se tendrán mayores pérdidas tanto de combustible como de vidrio fundido.
El trabajo de esta aplicación propone el uso de un controlador difuso el cual responda de una manera más rápida y en forma más robusta a los cambios de producción en comparación a un controlador PID. Se hace el desarrollo e implementación de un controlador difuso para el control de temperatura en lo que corresponde a la última zona de un alimentador de vidrio. Se desarrolló un modelo matemático de las temperaturas en un alimentador de dos zonas, basado en las leyes de física. Para la obtención de dicho modelo, se utilizó un esquema funcional, además de modelos semejantes de cierta literatura [4]. En este modelo solo se contemplan las temperaturas superficiales de cada zona ya que son las mediciones que se realizan en planta con termofibras y pirómetros. Tomando como base este modelo, se procedió a la construcción de un simulador. Para lograr esto, fue necesario interpretar una serie de parámetros que representan las características esenciales del alimentador.
A continuación, después de haber desarrollado el modelo, se llevó a cabo la validación del mismo usando los datos obtenidos en la etapa de identificación de
parámetros. Con estos datos, se efectuaron pruebas en planta observando cierto com-portamiento bastante similar al de un proceso de primer orden. Por esta razón, se utilizó un procedimiento simple para encontrar una aproximación de los valores de re-traso y constantes de tiempo. Con la ayuda del simulador se llevó a cabo el diseño del controlador difuso. Además de varios ajustes sobre el mismo hasta lograr un desempeño adecuado.
Así mismo, se realizó el diseño de uno de los esquemas de control más utilizados en la industria. Nombre el cual resulta de la abreviación control proporcional, inte-gral y derivativo (PID). El objetivo es buscar los valores de las ganancias las cuales hacen posible la cancelación de algunos polos del proceso. En el caso de un alimenta-dor de vidrio, el cambio de temperatura con respecto al movimiento de la válvula de combustible dentro de una zona se comporta como un proceso de primer orden.
El siguiente paso fue el diseño del controlador difuso para alimentadores de vidrio del tipo fuzzy - PI para controlar la temperatura en la última zona del alimentador. Esto significa que como entrada del controlador se tendrá el error actual e(n) y el error anterior e(n — 1), y como salida un incremento/decremento para la variable de manipulación u(n) [21]. La forma en que se mueve la salida del controlador se establece por medio de reglas con el siguiente formato:
Si (Estado del proceso) Entonces (Salida de control).
Por último después de haber diseñado las reglas del controlador difuso, se efectua-ron varias pruebas modificando las condiciones del simulador para representar diferentes escenarios. En cada una de ellas se comparó el comportamiento del controlador difu-so contra el controlador de bajo nivel PID. Las pruebas en planta no fueron posibles debido a cambios en los programas de producción.
Como conclusión de este trabajo se observó que el desempeño del controlador difuso tiene una respuesta más rápida que el controlador PID en cambios de referencia o set point, pero con un sobretiro mayor. En cuanto a perturbaciones provocadas por cambios de temperatura de la zona anterior, el controlador difuso tiene mejor comportamiento que un PID convencional. Es necesario incluir algún concepto de tiempo dentro de las reglas del controlador difuso para superar los problemas que se presentan en procesos los cuales tienen tiempos muertos muy grandes.
1.6.4 Diseño e Implementación de un Controlador Difuso
-Neuronal para un Generador Sincrónico
Se ha designado el diseño e implementación de un sistema de control basado en control difuso y redes neuronales para la estabilización de un generador sincrónico. Este
sistema está integrado por dos controladores difusos tipo PI y dos redes neuronales, y por sus características, es conocido como controlador Difuso - Neuronal [7].
El diseño del controlador difuso se emplea para la estabilización del voltaje en terminales del circuito de armadura del generador sincrónico. El otro, para la estabi-lización de la frecuencia a su valor nominal de la señal de corriente alterna generada por la máquina sincrónica. El esquema Difuso - Neuronal únicamente se aplica para la estabilización de la frecuencia, y el sistema de control se implementa en un pro-grama computacional para diseñar las interfaces de medición y de potencia para la implementación en tiempo real.
Se utiliza un grupo motor - generador acoplados mecánicamente localizados en el laboratorio de conversión de la energía del ITESM campus Monterrey. Este grupo consiste de un motor de corriente directa y de un generador sincrónico de energía de c.a. de 6 polos. Para probar el desempeño del controlador Difuso - Neuronal, se realizan cambios drásticos en la demanda de potencia al generador.
En esta aportación se realiza la estabilización de la frecuencia atacando la veloci-dad angular de la máquina motriz. La estabilización del voltaje en terminales se logra principalmente mediante el circuito del campo de la propia máquina sincrónica. Todo esto parte de un modelo matemático que describe la dinámica del generador sincrónico. Los valores de los parámetros para este modelo son tomados de un modelo de máquinas eléctricas para estudios de estabilidad, y presentan al generador que se utiliza para el desarrollo de esta aplicación.
Utilizando el modelo matemático se observa el comportamiento en la frecuencia y voltaje en terminales a través del tiempo debido a cambios en la carga. Esta información se considera útil para el diseño de los controladores difusos del tipo PI. El entrenamiento de una de las redes es mediante este mismo modelo con el fin de probar de manera simulada todo el esquema Difuso - Neuronal.
La aplicación de este método no fue solo a manera de simulación. Se diseñaron varios componentes de hardware tales como dos tarjetas electrónicas las cuales fueron útiles para la interface de medición y para la interface de potencia. En la parte de software, lo que se desarrolló fue un programa computacional, el cuál está comprendido de un editor de funciones de membresía y un editor de reglas. De esta manera, mediante este programa, se pueden configurar diferentes controladores difusos. Adicionalmente el programa es capaz de entrenar varias redes neuronales cada una con sus propios vectores de entradas y salidas.
Los resultados obtenidos muestran el desempeño de la red neuronal emuladora y de los controladores difusos del tipo PI para la frecuencia y voltaje. El cumplimiento
15
de la red es satisfactoria. Se obtiene un entrenamiento aceptable ya que logra imitar al generador en tiempo real. La función de los controladores difusos fue de tal forma que comparándose con diferentes aplicaciones de la literatura, también fue aceptable. Mostraron robustez dado que los cambios prácticamente instantáneos en la demanda de potencia fueron del 60% de la capacidad total del generador.
1.6.5 Identificación de Modelos Difusos Tipo Sugeno
Apli-cando Discretización Difusa y Estimación Ortogonal de
Parámetros
Dentro de esta investigación, se da a conocer una propuesta para la identificación de modelos difusos del tipo Takagi - Sugeno - Kang. Lo que se aplica es la técnica de discretización difusa empleando la técnica de Clustering Difuso. Además de utilizar un algoritmo de estimación ortogonal de parámetros. Este método fue propuesto por Reza Langari y Liang Wang, y se enriquece con la adición de un algoritmo de búsqueda de centros de clusters que garantiza la convergencia del algoritmo aplicado en el clustering difuso [12].
Se implementa un algoritmo que define automáticamente la estructura óptima de un modelo difuso dado un conjunto de datos de entrada - salida y las variables que se desean utilizar en la definición de premisas y consecuentes de las reglas difusas. La técnica de discretización difusa se utiliza en la definición de la estructura de la premisa, mediante un algoritmo fuzzy C - means (FCM) se generan los conjuntos difusos de cada variable. Para determinar la estructura apropiada de los consecuentes, el algoritmo de estimación ortogonal transforma el espacio de entrada - salida en un espacio ortogonal equivalente. Este proceso estima cada parámetro del modelo de forma secuencial y de manera independiente uno del otro. Al mismo tiempo proporciona información de la estructura del consecuente. Se utilizan criterios de información de Akaike (AIC) y criterios de información bayesiana (BIC) con el fin de tener la definición de la estructura más adecuada de los consecuentes.
El algoritmo mencionado anteriormente, se aplica a un ejemplo de referencia am-pliamente conocido para su validación y comparación con otros tipos de identificación, mejorando el desempeño obtenido por éstos. Se presentan resultados en simulación del diseño de diferentes modelos para este problema, analizando las características del proceso, basándose en la información proporcionada por los mismos. Después se lleva a un análisis comparativo del modelo obtenido por este algoritmo y los resultados pre-sentados en otras publicaciones que aplican el mismo conjunto de datos para evaluación de los algoritmos de identificación.
Finalmente, este trabajo propone ser una buena plataforma para el desarrollo de un algoritmo de identificación basado en el modelo difuso de Sugeno que permita el ajuste en línea de sus parámetros, para adecuarse a los cambios dinámicos del sistema. Además, sugiere la implementación práctica de esta técnica para identificar modelos de orden elevado, que en este caso se recomienda tener el algoritmo programado en un lenguaje que proporcione rapidez en la ejecución de sus operaciones y una interface amigable para su previa configuración.
1.7 Explicación de Capítulos.
La estructura de esta tesis se organiza de la siguiente manera. En el Capítulo 1, se presenta lo correspondiente a la Introducción, donde se hace mención acerca del estado del arte, y el contexto donde se ubica la investigación; El Capítulo 2 muestra de manera teórica lo referente a la Modelación Difusa y el Control Nolineal, explicando más a detalle el marco teórico para ambas técnicas; el Capítulo 3 plantea el diseño y la experimentación, de tal forma que el lector tenga un acercamiento de los resultados obtenidos ante diferentes cambios de referencia; finalmente, el Capítulo 4 incluye las conclusiones y el trabajo a futuro con el que se puede hacer una nueva aportación de tesis.
Capítulo 2
Modelación y Control Nolineal
Este capítulo muestra de manera teórica lo referente a la Modelación Difusa y el Modo Deslizante como herramienta de trabajo para considerar sistemas nolineales. En primera instancia, por el lado de la modelación, existen escencialmente dos formas por las cuales un modelo puede ser obtenido, por previo conocimiento, en términos de las leyes de física, o por experimentación en un proceso. La aproximación en esta tesis, se hace sobre una planta monovariable y otra multivariable de dos entradas dos salidas que se representan por un conjunto de ecuaciones de diferencia. Estas ecuaciones nolineales, generan patrones de entrada y salida a ser procesados por el sistema difuso. El punto principal es obtener la identificación de los parámetros difusos mediante el método de mínimos cuadrados recursivos, para después diseñar una ley de control capaz de soportar dichas características. Considerando en segunda instancia el modo deslizante, se sabe que es un concepto de control nolineal que se refiere al análisis y al diseño de algoritmos para sistemas altamente nolineales. El modo deslizante sirve de complemento para ejercer el control en lazo cerrado de los sistemas antes mencionados.
2.1 Modelación Difusa
En esta Sección se explican varios puntos para entender acerca de lo que comprende la modelación difusa. Se tienen puntos en las siguientes subsecciones tales cómo la construcción de un modelo matemático, la identificación de sistemas y finalmente el aspecto técnico de la estimación difusa empleando mínimos cuadrados recursivos.
2.1.1 Construcción de un Modelo Matemático
El problema principal al desarrollar un modelo matemático es encontrar los estados y los parámetros del sistema de manera simbólica. Dichos parámetros son los que describen la escencia del mismo. Se tienen variables típicas las cuales son elegidas como estados, por ejemplo se tienen posiciones y velocidades en el caso de sistemas mecánicos;
voltajes y corrientes para sistemas eléctricos; nivel y flujo en sistemas hidráulicos; y finalmente temperatura, presión, y densidad sobre sistemas térmicos. La relación entre estados de las variables se determina empleando ecuaciones de balance por fuerza, momentos, masa, energía, y ecuaciones constitutivas.
2.1.2 Identificación de sistemas
La identificación de sistemas es el acercamiento experimental hacia la modelación de procesos [3]. La identificación de sistemas considera lo siguiente:
• Planeación experimental. En ocasiones es difícil y algo costoso experimentar con procesos industriales. Por lo tanto, se desea contar con métodos de identi-ficación los cuales no requieran un tipo especial de señales de entrada. Ciertos métodos clásicos dependen de que la entrada sea de una forma precisa, por ejem-plo senoidal o de impulso. Otras técnicas pueden manejar virtualmente cualquier tipo de señales de entrada, con la expectativa de incrementos computacionales. Un requerimiento de la señal de entrada es que debe estimular lo suficiente la ma-yor parte de los modos del proceso. Un buen método identificación se recomienda que sea insensible a las características de la señal de entrada.
• Selección de la estructura del modelo. La estructura de los modelos se deriva del conocimiento previo acerca del proceso y de las perturbaciones. En algunos casos la única noción es que el proceso se puede describir como un sistema lineal con un rango de operación particular. Es natural entonces emplear representaciones generales de sistemas lineales. Dichas representaciones son conocidas como cajas negras. En ocasiones es posible aplicar leyes de física para derivar los modelos del proceso que contienen solo pocos parámetros desconocidos.
• Criterio. Cuando se formula un proceso de identificación, se postula un criterio para dar cierta medición de qué tan bien se ajusta el modelo a los datos ex-perimentales. Es posible también derivar criterios de argumentos probabilísticos haciendo suposiciones estadísticas.
• Estimación de parámetros. Para resolver el problema de la estimación de parámetros se requiere tener datos de entrada-salida del proceso, una clase de modelos y un criterio. De esta manera el problema de estimación puede formularse como un caso de optimización, donde el mejor modelo es el que mejor ajusta los datos de acuerdo con el criterio dado. El resultado del problema de estimación depende de la forma como se formula el problema.
• Validación del modelo. Cuando un modelo es obtenido de los datos experimen-tales, es necesario revisarlo con el fin de conocer sus deficiencias. Para la vali-dación del modelo es útil determinar factores tales como respuestas escalón, res-puestas impulso, polos y ceros. Es práctico buscar las partes que son sensibles a cambios en el modelo ya que el proposito de la validación es examinarlo en detalle con respecto a las inadaptabilidades.
En la práctica, el proceso de identificación de sistemas es iterativo. Al investigar un proceso donde el conocimiento previo del modelo es escaso, es razonable comenzar con un análisis de respuesta o frecuencia transitoria para obtener estimaciones de las perturbaciones y de la dinámica. Los resultados se pueden emplear para planear ex-perimentos futuros. Los datos obtenidos son utilizados para estimar los parámetros desconocidos del modelo. Basado en los resultados, la estructura del modelo puede ser mejorada y nuevos experimentos pueden ser necesarios.
2.1.3 Estimación Difusa Empleando Mínimos Cuadrados
Re-cursivos
De acuerdo con Gauss, el principio de mínimos cuadrados se refiere a que los parámetros desconocidos de un modelo deben ser seleccionados de forma tal que la suma de los cuadrados de las diferencias entre los datos reales y los estimados es un mínimo. Para ciertos propósitos, es más conveniente, o hasta escencial, hacer la esti-mación recursivamente tomando las observaciones una a la vez (en orden cronológico), y actualizar cada vez la varianza estimada. Esto permite una estimación en línea, por ejemplo, como parte de un esquema adaptable de control, pero la estimación en línea requiere un número de resguardo para evadir ganancias actualizadas inapropiadas, y es menos directo de lo que aparece a primera impresión. Un segundo empleo de es-timación recursiva, es permitir a un modelo variante en el tiempo seguir la pista del comportamiento el cual es muy complicado de describir adecuadamente por un modelo de parámetro constante. Por ejemplo, los sistemas lineales pueden ser modelados de esta manera, y la naturaleza de la nolinealidad puede ser clara por la variación de tiempo del modelo lineal validado temporalmente.
Ya en el diseño del sistema difuso, el método de mínimos cuadrados recursivos minimiza la sumatoria correspondiente a la relación de patrones entrada - salida. El objetivo principal es minimizar la suma de los cuadrados de las diferencias entre los datos reales y los estimados [31].
La siguiente formula muestra lo anterior.
y** o) "oJ
Para el diseño del método se tienen en consideración los siguientes 4 pasos:
> Paso 1. Determinar el rango del universo de discurso dependiendo del par de
entradas y salidas, así como el tipo de conjuntos difusos de entrada que se van a utilizar para el diseño.
> Paso 2. Diseñar las reglas difusas If-Then mediante la nomenclatura
IF xi is A[l and • • • and xn is A3», THEN y is Bh"ln (2.2)
donde k = 1,2,..., AT¿, i = 1,2,..., n y Bh'"ln es cualquier conjunto difuso con valor central en y*1'"ln el cual es libre de sufrir cambio. Específicamente, el sistema difuso se escoge con fuzzificación singleton, inferencia producto, y defuzzificación centro promedio. El sistema se diseña de la siguiente manera:
E,
1=1£i
1=1y lillas»)]
J{X)~ „ Nn r ( v,
donde y*1""'» son los parámetros libres a ser identificados dentro de un vector
9 Ni dimensional
u— [y . . . y .y , . . . , ? / , . . . , ? / n ¿... ¿ y n 1 í ^ . 4 )
después la ecuación (2.3) se reescribe
/ (x) = bT (x) 9 (2.5) donde
b(x) — (bl'"l(x),... ,i
ilN2—Nns \ hNlN2'"Nn(x))T (2 6)
equivalente a
Paso 3. Seleccionar parámetros iniciales de 9. Considerando principalmente
la experiencia y el conocimiento humano. En su defecto, tener en cuenta una generación de números aleatorios respetando el universo de discurso definido pre-viamente para la inicialización.
Paso 4. Para cada patrón p = 1,2,..., calcular los parámetros de 6 empleando
el método de los MCR como sigue:
9{p) = 9(p - 1) + K(p)[yl - bT(af
0)9(p - 1)] (2.8)
K(p) = P(p - l)&(xS)[6T(4)^b " 1)&(*5) + I]"1 (2-9)
P(p) = P(p-l)-P(p-l)b(xpo)[bT(xpQ)P(p-l)b(xpo) + l}-lbT(xpo)P(p-l) (2.10)
en seguida, 0(0) se escoge del Paso 3, y P(0) = al donde a es una constante grande, e "I" representa la matriz identidad. El diseño del sistema es equivalente a (2.3) con los parámetros de yí l"í n semejantes a los elementos correspondientes a 9(p).
El algoritmo de mínimos cuadrados recursivos (2.8-2.10) se obtiene de minimizar
Jp representada en la expresión 2.1 con f(xl) de la forma mostrada en la ecuación 2.3.
2.2 Control en Modo Deslizante
Esta sección explica aspectos de control nolineal de manera teórica, en particular aspectos que engloban el modo deslizante. Los puntos principales en mención son acerca de control robusto, control deslizante, la combinación de un controlador basado en conocimiento difuso con modo deslizante, y por último, el aspecto técnico del diseño de la superficie de deslizamiento y control equivalente.
2.2.1 Control Robusto
Una de las cuestiones principales en el diseño de controladores, es cómo tomar en cuenta las discrepancias entre el modelo de la planta empleada para el diseño y el modelo real, un factor puede ser por cierto error en la modelación. Un término genérico para este error es conocido como incertidumbre del modelo, el cual puede ser representado en diferentes formas. Dos clases principales de incertidumbres son: incertidumbre estructurada (paramétrica) e incertidumbre no estructurada, usualmente especificada en el dominio de la frecuencia.
El diseño de control robusto es una alternativa para resolver el problema contra incertidumbres en los parámetros del modelo de la planta, con el fin de garantizar
la estabilidad de lazo cerrado del sistema. Como siempre, para casos de variaciones grandes en las características de la planta, puede llegar a ser difícil asegurar un nivel satisfactorio de desempeño y estabilidad. Por otro lado, se tiene el control adaptable, y es también una solución apropiada para lidiar con incertidumbres paramétricas, pero para este caso de estudio, el tema en particular se lleva a cabo con la del modo deslizante
[3].
2.2.2 Control Deslizante
Un simple acercamiento con el control robusto es la llamada metodología de control deslizante. Intuitivamente se basa en el sentido de que los sistemas de primer orden (sistemas representados por ecuaciones diferenciales de primer orden) son más fáciles de controlar que los sistemas de orden n (sistemas descritos por ecuaciones diferenciales de orden n). Además considerando que ese primer orden sea la parte de la incertidumbre o la parte nolineal.
Se toma en cuenta cierta simplificación de notación, la cual permite problemas de orden n ser reemplazados por problemas equivalentes de orden mínimo. Es entonces fácil de demostrar que para problemas transformados, el desempeño en principio puede ser realizado en presencia de inexactitudes de parámetros arbitrarios. Tal desempeño se obtiene a precio de una actividad extremadamente alta de control. Esto nos guía a la modificación de leyes de control las cuales, dada la actividad de acción admisible, se enfoca hacia el logro de una interacción efectiva entre desempeño de seguimiento e incertidumbre paramétrica. Adicionalmente, en ciertas aplicaciones, particularmente aquellas que envuelven el control de motores eléctricos, las leyes de control no modifi-cadas, pueden ser empleadas directamente [19].
Para la clase de sistemas en los cuales implica todo lo anterior, el diseño de control deslizante provee un acercamiento sistemático al problema de mantener estabilidad y desempeño consistente en el sentido de imprecisiones de modelación, o cuando se cuenta con un modelo difuso. Además, el hecho de permitir interacciones entre modelación y desempeño a ser cuantificado en simple manera, puede iluminar por completo el diseño del proceso. El control deslizante ha sido aplicado exitosamente en manipuladores de robot, vehículos acuáticos, transmisiones y motores automotrices, motores eléctricos de alto desarrollo, y sistemas de poder.
2.2.3 Controlador Basado en Conocimiento Difuso (FKBC)
en Modo Deslizante
El acercamiento general hacia el diseño de control en modo deslizante difuso es la división del plano de fase en dos semiplanos, a esta división se le conoce como la línea de conmutación. Dentro de los semiplanos positivo y negativo, las salidas de control son producidas respectivamente. La magnitud de la salida de control depende de la distancia del vector de estado a la línea de conmutación. Teniendo en cuenta la amplia aplicación de los FKBC, es posible preguntarse por que los FKBC son muy exitosos. Esto se puede contestar mediante una simple aplicación de control robusto llamado control en modo deslizante. Este método se puede aplicar en presencia de incertidumbres del modelo, fluctuaciones de parámetros, y perturbaciones externas.
El control con modo deslizante es apropiado generalmente para el control de seguimiento. La desventaja de este método son los cambios drásticos en la variable de control los cuales ocasionan desgaste en los actuadores. Como siempre, esto se puede evadir mediante una pequeña modificación: una frontera acotada es añadida cerca de la línea de conmutación la cual suaviza el comportamiento de control. Además que asegura que los estados del sistema permanecen dentro de ese margen. Dado que las incertidumbres del modelo son conocidas, se garantiza estabilidad y desempeño del sistema de control. En principio, el FKBC trabaja como un controlador en mo-do deslizante modificamo-do. Comparamo-do con sistemas de momo-do deslizante ordinarios, el FKBC tiene la ventaja de poseer alta robustez [9].
2.2.4 Superficie de Deslizamiento y Control Equivalente
De acuerdo a lo descrito por Jacques y Slotine [19], para establecer los principales conceptos y las notaciones del control deslizante, se parte considerando el caso de un sistema monovariable como sigue:
x{n) = f(x) + b{x)u (2.11)
donde:
x : Salida del Sistema
u : Es la entrada de control x : Es el vector de estados
f(x) : Función nolineal 6(x) : Ganancia de control
Los parámetros f(x) y b(x) son imprecisos, pero se consideran que están acotadas. El problema de control es hacer que los estados (x) tengan un seguimiento sobre la
referencia deseada (xd) en presencia de las imprecisiones del modelo. De tal forma que = x(0).
Dada una notación simplificada, el error de seguimiento de la variable x queda de la forma x = x — x¿ el cual representa el vector de estados.
Enseguida se define la superficie variante en el tiempo S(t) dentro del espacio de estados R^ para la ecuación escalar s(x; t) = 0, y se tiene
(2.12)
El parámetro A es una constante positiva la cual define la pendiente de la línea de conmutación, y el parámetro s es simplemente una suma ponderada de la posición y la velocidad del error. Mas adelante se introduce al respecto de manera más completa.
Dadas las condiciones iniciales x = x — x¿, el problema de seguimiento x = Xd
es equivalente al de permanecer en la superficie S(t) para toda t > 0. Ciertamente
s = 0 representa una ecuación diferencial lineal cuya solución única es x = 0, dadas las condiciones iniciales antes mencionadas. De esta manera el problema de seguimiento puede reducirse manteniendo el valor del escalar s en cero.
Dentro de la construcción de las dinámicas equivalentes, el movimiento del sistema en la superficie de deslizamiento puede tener cierta interpretación geométrica, como un promedio de la dinámica en ambos lados de s(t).
La dinámica en modo deslizante está dada por s = 0.
Resolviendo la ecuación anterior, se obtiene una expresión para u conocida co-mo control equivalente ueq, la cual se interpreta como la ley de control continua que mantiene la s = 0 si la dinámica fuera conocida. Por ejemplo para el sistema de la forma
x = f + u
se define
u
eg=
-f
+ x
d-
Xx
y la dinámica del sistema en modo deslizante quedax = f + ueq = xa — A x
Comprobando lo anterior, y para que el sistema mantenga la igualdad x(t) = Xd(t),
se interpreta la superficie de deslizamiento s = 0 de acuerdo con la ecuación 2.12, y se obtiene
derivándose
s= (— + XJx = í+Xx (2.13)
(2-14) La mejor aproximación de ü para la ley de control continua que asegura s = 0 es entonces
Zt — —J ~"r Xd — Á X (^¿¿.lüj
Para satisfacer la condición ss < —r)\s\ a pesar de las incertidumbres en / , se añade a ü un termino discontinuo en s = 0 de la siguiente manera:
u = ü — ksgn(s) (2.16)
de lo anterior, sgn se refiere a la función signo:
+1 si s>0 - 1 sis<0
y si A; es lo suficientemente grande, se garantiza que s s < —rj \s\ se cumpla. Ciertamente se tiene de (2.14 y 2.16)
-—s2 = s -s = [ / - / - ksgn(s)]s = (/ - f)s - k \s\ obteniendo que
k = F + r] (2.17)
y de la expresión f — f < F se deriva finalmente la desigualdad deseada
1 d 2 • ^ i ,
- - s =s.s<-V\s\
Nótese de (2.17) que la discontinuidad de control k a través de la superficie s = 0 se incrementa de acuerdo a la magnitud de la incertidumbre paramétrica. También, la / y la F no necesariamente dependen solo de x o x. Mas que nada son funciones de cualquier variable medida externa al sistema x = / + u, y pueden depender explícitamente del tiempo.
Del análisis anterior, se tiene que la variable de control (manipulación), se calcula mediante a (2.16), y tal cómo se menciona en las principales contribuciones de este trabajo, la estimación del parámetro ü se determinó modelando inversamente la planta original mediante un sistema difuso y método de minimos cuadrados recursivos. El calculo de los parámetros k y s que sirvieron como complemento para el diseño de la ley de control, se llevó a cabo siguiendo la teoría del modo deslizante explicada anteriormente.
2.2.5 Suavizamiento de la Manipulación Empleando la
Fun-ción SaturaFun-ción
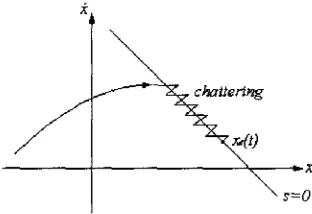
[image:40.620.256.412.408.515.2]De acuerdo a la sección anterior, se aprecia que el procedimiento para el diseño de control consiste de dos pasos. El primero de ellos habla de la selección para la ley de control u con el fin de verificar la condición de deslizamiento sé < —77 \s\. Como siempre, para considerar la imprecisión y la incertidumbre de modelación, la ley de control tiene que ser discontinua a través de s(t), y desde que se tiene la implementación de la conmutación del control asociado (variable a manipular), es necesariamente imperfecta, es decir, que genere un castañeo tal como se muestra en la Figura 2.1. Este castañeo en el campo real es indeseable ya que implica alta actividad del controlador, y a la larga genera dinámicas olvidadas de alta frecuencia en el transcurso de la modelación.
Figura 2.1: Castañeo a Causa de la Conmutación de Control Imperfecta
En el segundo caso, la ley de control discontinua u se suaviza apropiadamente para lograr una óptima interacción entre el ancho de banda de control y precisión de seguimiento. Puede notarse que el primer paso toma en cuenta la incertidumbre paramétrica y el segundo logra robustez ante dinámicas no modeladas.
En general, para que los actuadores de un sistema de control trabajen apropia-damente, el castañeo debe ser eliminado. Esto se logra suavizando la discontinuidad
del control (manipulación) en una región cercana a la superficie de conmutación. La siguiente expresión muestra lo anterior.
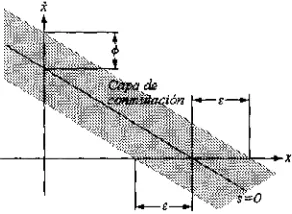
B(t) = {x, \s(x;t)\ < $} * > 0 (2.18) donde $ es el espesor o el grosor de la región a través del eje x, y el valor e = $/An - 1
es el ancho de la banda completa a lo largo del eje x. La Figura 2.2 ilustra la forma de como es la línea de conmutación con todos sus parámetros.
• - í
^ s . Capa de
[image:41.630.260.406.186.293.2]L.
Figura 2.2: Ancho de la Franja a lo Largo de la Línea de Conmutación
Fuera de la franja B(t), se escoge la ley de control u de manera tal que satisfaga la
ss < —r) \s\ que garantiza que la región es atrayente e invariante. Dentro de B(t = 0) se interpola la señal de control y se reemplaza la función sgn(s) por s/<3> tal como se muestra en la Figura 2.3. Esto conduce a una ley de control de seguimiento garantizada hasta cierta precisión, y se calcula mediante:
u = ü — ksat(s/<&)
Capetas ¡;
(2.19)
Figura 2.3: Interpolación de Control en la Franja de Conmutación
Dado que en la práctica se recomienda suavizar la manipulación para evitar des-gaste en el actuador, la simulación de este trabajo solo abarca resultados usando la función saturación (sat), debido a que el lazo de control del sistema en general incluye
[image:41.630.256.411.440.582.2]detalles de singularización o ciclos algebraicos, los cuales impiden la ejecución con la función signo (sgn). La justificación de este hecho se fundamenta en que el sgn repre-senta una función discontinua, lo cual en la práctica es difícil de implementar. Además se sabe que las funciones discontinuas presentan un problema para el calculo integral y derivativo. Por esa razón los paquetes como el MATLAB, que realizan cálculos numéricos de integración tienen problemas para obtener resultados dentro del incre-mento el cual el usuario le defina. Al usar la operación de suavizamiento se elimina el problema numérico y se puede dar una buena aproximación de la función discontinua si se hace lo suficientemente grande la pendiente de la misma.