INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
“Diseño de un sistema de control automático para la reducción de
vibraciones en ductos de transporte de fluidos”
T E S I S
Q U E P A R A O B T E N E R E L T Í T U L O D E :
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A
SERRANO PÉREZ EDGAR
ASESORES
Contenido
1 INTRODUCCIÓN ... 4
1.1 OBJETIVO ... 4
1.1.1 OBJETIVOS PARTICULARES ... 4
1.2 PLANTEAMIENTO ... 5
1.3 JUSTIFICACIÓN ... 5
1.4 HIPÓTESIS ... 5
1.5 ESTADO DEL ARTE ... 6
2 MARCO TEÓRICO ... 9
2.1 VIBRACIONES EN TUBERÍAS ... 9
2.2 CAVITACIÓN ... 10
2.2.1 PRINCIPALES EFECTOS Y CONSECUENCIAS DE LA CAVITACIÓN ... 11
2.2.2 TIPOS DE CAVITACION ... 13
2.2.3 CONTENIDOS DE GAS ... 13
2.3 CONTROL AUTOMÁTICO ... 14
2.4 CLASIFICACIÓN DE LOS CONTROLADORES INDUSTRIALES ... 15
2.4.1 ACCIÓN DE CONTROL DE DOS POSICIONES O DE ENCENDIDO Y APAGADO (ON/OFF) ... 15
2.4.2 ACCIÓN DE CONTROL PROPORCIONAL ... 16
2.4.3 CONTROLADOR PROPORCIONAL-INTEGRAL ... 19
2.4.4 CONTROLADOR PROPORCIONAL-INTEGRAL-DERIVATIVO (PID) ... 21
2.5 LÓGICA DIFUSA ... 22
2.5.1 CONJUNTOS DIFUSOS Y FUNCIONES CARACTERÍSTICAS ... 23
2.5.2 OPERACIONES CON CONJUNTOS DIFUSOS ... 26
2.5.3 REGLAS DIFUSAS ... 26
2.6 CONTROL DIFUSO ... 26
2.6.1 MÉTODOS DIFUSOS ... 27
2.6.2 MÉTODO DE MAMDANI ... 28
2.7 APLICACIONES DEL CONTROL DIFUSO. ... 28
2.7.1 VENTAJAS Y LÍMITES DEL CONTROLADOR DIFUSO ... 29
2.8 SOFTWARE PARA DESARROLLO DE ALGORITMOS DE CONTROL MATLAB ... 30
2.8.1 IMPLEMENTACIÒN DE LÓGICA DIFUSA EN MATLAB. ... 30
2.9 MICROCONTROLADOR... 31
2.9.2 LENGUAJES DE PROGRAMACIÓN PARA MICROCONTROLADORES ... 33
2.9.3 COMPARATIVA DE LOS LENGUAJES DE PROGRAMACIÓN... 33
2.9.4 AMBIENTES DE DESARROLLO INTEGRADO PARA LA PROGRAMACIÓN DE MICROCONTROLADORES PIC. ... 34
2.10 MEDIDORES DE FLUJO ... 36
2.10.1 MEDIDORES DE FLUJO TIPO TURBINA ... 36
2.11 SENSOR DE EFECTO HALL ... 39
2.11.1 SENSOR DN6851 ... 40
2.12 MATERIALES EMPLEADOS EN SISTEMAS HIDRÁULICOS. ... 41
2.12.1 PVC ... 41
2.12.2 NYLAMID ... 42
3 DESARROLLO DE INGENIERÍA ... 44
3.1 CASO DE PARTICULAR DE ESTUDIO. ... 44
3.2 DISEÑO DE UN INSTRUMENTO DE MEDICIÒN DE FLUJO ... 45
3.2.1 SELECCIÒN DE LA TURBINA ... 45
3.2.2 DIMENSIONAMIENTO DE LA TURBINA... 47
3.3 DISEÑO 3D DE LOS ELEMENTOS DEL MEDIDOR DE FLUJO ... 47
3.3.1 DIFUSORES ... 48
3.3.2 CONOS ... 49
3.3.3 UNIÒN PARA DIFUSOR ... 50
3.3.4 ENSAMBLE DE LOS ELEMENTOS DEL MEDIDOR DE FLUJO ... 50
3.4 FABRICACIÓN MECÁNICA DEL MEDIDOR. ... 51
3.4.1 FABRICACIÓN DE DIFUSORES ... 51
3.4.2 FABRICACIÒN DE LAS UNIONES PARA DIFUSORES Y ARMAZÓN DE LA TURBINA ... 53
3.4.3 BARRENADO Y MACHUELADO DE LAS UNIONES ... 53
3.4.4 ACONDICIONAMIENTO DE LA TURBINA ... 54
3.4.5 SELLADO DEL MEDIDOR DE FLUJO ... 55
3.5 DISEÑO DE LA ETAPA ELECTRÓNICA DEL MEDIDOR DE FLUJO. ... 56
3.6 DISPOSITIVO DE INTERFAZ VISUAL LCD. ... 56
3.6.1 ACONDICIONAMIENTO DE SEÑAL ... 56
3.7 PROGRAMACIÒN DEL MICROCONTROLADOR EN LENGUAJE BASIC ... 57
3.7.1 SIMULACIÒN ELECTRÓNICA DEL PROGRAMA DE MEDICIÓN ... 57
3.9 INTEGRACIÓN E INTERACCIÓN DE LOS COMPONENTES MECÁNICOS Y
ELECTRÓNICOS DEL MEDIDOR DE FLUJO TIPO TURBINA ... 61
3.10 CARACTERIZACIÓN DEL MEDIDOR DE FLUJO (ELEMENTO PRIMARIO DE MEDICIÓN) ... 62
3.11 DIAGRAMA DE TUBERÍA E INSTRUMENTACIÓN PROPUESTO PARA UN PROTOTIPO DE PRUEBAS ... 64
3.12 PROPUESTA DEL ELEMENTO FINAL DE CONTROL ... 65
3.13 DISEÑO DEL ALGORITMO DE CONTROL AUTOMATICO ... 67
3.14 DISEÑO MEDIANTE EL SOFTWARE MATLAB Y EL FUZZY LOGIC TOOLBOX ... 68
3.14.1 SIMULACIÓN DEL ALGORITMO DE CONTROL AUTOMÁTICO ... 73
3.15 IMPLEMENTACIÒN DE LA PROGRAMACIÓN DEL ALGORITMO DE CONTROL DIFUSO CON EL MICROCONTROLADOR PIC16F628A. ... 76
4 ESTUDIO ECONÓMICO ... 78
4.1 COMPONENTES ELECTRÓNICOS ... 78
4.2 COMPONENTES MECÁNICOS ... 79
4.3 DISEÑO E INGENIERÍA MECÁNICA ... 80
4.4 DISEÑO E INGENIERÍA ELECTRÓNICA ... 80
4.5 COSTO TOTAL DEL PROYECTO ... 81
5 CONCLUSIONES ... 82
1
INTRODUCCIÓN
El transporte de los fluidos se ha convertido en una actividad indispensable para las industrias de transformación y servicios en mayor medida que se requieren trasladar grandes cantidades de fluidos de una manera controlada de una ubicación a otra. Uno de los principales problemas que se presentan durante el transcurso de este proceso de transporte, son las vibraciones mecánicas generadas en las tuberías y elementos de control. Este tipo de fenómenos son destructivos en mediano y largo plazo para los sistemas hidráulicos, y su importancia de estudio radica en que el proceso de transporte de fluidos es interrumpido para dar paso al mantenimiento y reparaciones en la red hidráulica.
1.1 OBJETIVO
Diseñar un sistema de control automático para la reducción de vibraciones en sistemas de distribución hidráulicos que permita prolongar la vida útil de las bombas y paredes de las tuberías de agua, mediante la reducción de los fenómenos de cavitación, resonancia y vibraciones inducidas por flujo.
1.1.1 OBJETIVOS PARTICULARES
Diseñar y fabricar un instrumento de medición de flujo que pueda ser aplicado a sistemas de control de sistemas hidráulicos.
1.2 PLANTEAMIENTO
Debido a que en la industria de transformación el transporte de materiales mediante tuberías es una actividad muy común y que usualmente en éste procedimiento se presentan fenómenos de resonancia, cavitación y vibraciones inducidas por flujo que suelen producir severos daños en las bombas, tuberías y elementos de control de flujo, se ha decidido resolver éste problema mediante un controlador difuso que permita trasladar la mayor cantidad de fluido reduciendo la generación de éstos fenómenos perjudiciales para el sistema de tuberías.
1.3 JUSTIFICACIÓN
Debido a que grandes empresas tratadoras de agua, alimenticias y la industria de la transformación en general invierten fuertes sumas de dinero anualmente para dar mantenimiento a bombas, elementos de control de flujo así como la tubería del sistema, el hecho de poder evitar los fenómenos de resonancia, cavitación y vibraciones inducidas por el flujo mediante un sistema de control automático permitirá reducir costos de reparación y mantenimiento, así como optimizar la vida útil de los elementos del sistema de distribución de fluidos.
Un controlador difuso emplea el conocimiento experto para conseguir un grado de automatización mayor, el control difuso cubre un amplio rango de parámetros del sistema y puede afrontar la mayoría de las perturbaciones, reduce el tiempo de desarrollo y mantenimiento.
El control difuso es recomendable:
Para procesos muy complejos, cuando no hay un modelo matemático simple
Para procesos altamente no lineales
Si el procesamiento del (lingüísticamente formulado) conocimiento experto puede ser desempeñado
1.4 HIPÓTESIS
Si se conoce la forma empírica en la que un sistema se comporta bajo ciertas condiciones, esto es, sabemos de manera precisa como es que la salida está relacionada debido a la interacción de la entrada con las perturbaciones y el sistema, entonces podemos aplicar un algoritmo difuso que nos permita controlarlo, optimizando la respuesta del sistema y corrigiendo las desviaciones que se presentan en el mismo.
1.5 ESTADO DEL ARTE
Para la mayoría de sistemas en ingeniería, hay dos fuentes importantes de información: los sensores que proveen medidas numéricas de variables, y los expertos humanos que proveen instrucciones y descripciones lingüísticas acerca del sistema. La información numérica que la proveen los sensores, es la fuente única de información en las aproximaciones convencionales a problemas de ingeniería, mientras que difícilmente incorporamos la información lingüística. Debido a que hay gran cantidad de conocimiento almacenado en términos lingüísticos, es muy importante incorporarlo dentro de los problemas de ingeniería de manera sistemática y eficiente, máxime cuando corresponde a una forma muy cercana de describir el conocimiento humano.
Una aproximación a la forma como manejamos la información y la procesamos los humanos, fue presentada por Lofti Zadeh por medio de su Lógica Difusa, la cual permite incluir el razonamiento impreciso y el manejo de la incertidumbre, desde su misma concepción, bajo una connotación de procesamiento de datos aproximado y con palabras.
Los japoneses empiezan a explotar la lógica difusa de forma masiva, mientras que los occidentales asumen una actitud reacia, frente a estos nuevos desarrollos.
Aparece toda una serie de investigadores japoneses en el campo de la lógica difusa tales como Sugeno, Togai, Bart Kosko.
En 1964 Zadeh propone por primera vez la noción de conjuntos difusos en un memorando interno de investigación.
En 1965, la revista "Information and Control" publica el memorando anterior, como el articulo "Fuzzy Sets".
En 1974, el Británico Ebrahim Mamdani, demuestra la aplicabilidad de la lógica difusa en el campo del control. Desarrolla el primer sistema de Control Difuso práctico: La Regulación de un Motor de Vapor.
En 1986, Yamakawa, "Fuzzy Controller hardware system". Desarrolla controladores Fuzzy en circuitos integrados.
En 1987, aparece el concepto de “Fuzzy Boom", ya que se comercializa una multitud de productos basados en la lógica difusa, sobretodo en el Japón, pero ya para son bien conocidos productos como las cámaras de fotografía y video con ajuste de imagen difusos, entre otros.
El modelado difuso fue propuesto con el sistema Takagi Sugeno y en él se integran las potencialidades de los sistemas difusos y las redes neuronales artificiales. El primero aporta la claridad en cuanto a la descripción del modelo y las segundas su capacidad de adaptación gracias al aprendizaje.
Aunque esta nueva forma de modelar el conocimiento impreciso fue propuesta en 1975 por Zadeh, solo a partir del año 2000 se ha empezado a formular una serie de aplicaciones en el ámbito del control de procesos, procesamiento digital de señales y robótica. En este nuevo paradigma la imprecisión se intenta modelar de una manera más ajustada a la realidad recurriendo a generación de niveles de pertenencia también imprecisos.
Comercialmente, la lógica difusa ha sido usada con gran éxito para controlar máquinas y productos de consumo. En aplicaciones adecuadas, los sistemas difusos son de simple diseño y pueden ser entendidos e implementados por personas no especialistas en sistemas de control. En la mayoría de los casos, una persona con antecedentes técnicos medios puede diseñar un control difuso. La lógica difusa no es la respuesta para todos los problemas técnicos pero para aquellos problemas de control donde la simplicidad y la rapidez en la implementación son importantes, la lógica difusa es un fuerte candidato. Una muestra de aplicaciones que han utilizado lógica difusa exitosamente se enumera a continuación:
Metro de Sendai. El proyecto era difícil, ya que un Metro es un sistema que funciona en tiempo real y, por tanto, los sistemas de control deben regular los cambios no solo en el momento de producirse sino anticipándose a ellos. El tema fue abordado por los investigadores Shoji Miyamoto y Seiji Yasunobu y el 15 de julio de 1987 tuvo lugar la inauguración. La conducción resultó ser más suave que cualquier otra previamente conocida controlada, humana o mecánicamente. La precisión de la frenada fue de 7 cm, mientras que la realizada por un conductor suele superar los 20 cm. Las aceleraciones y desaceleraciones resultaron ser mucho más suaves. El número de cambios de marcha se redujo a un tercio de los de la conducción humana o de los controlados informáticamente por sistemas no borrosos. Todo ello redundó, además, en un ahorro del 10% de energía. Tampoco fue ilógico el que en Japón, hacia 1988, se produjese una especie de "boom" de la lógica borrosa. En consecuencia, actualmente más de cien empresas, entre ellas muchas de las mayores, realizan Investigación y desarrollo en estos campos, con miles de patentes realizadas, de las que, aproximadamente, un millar están en explotación.
1985 en los laboratorios AT&T BELL. Procesaba unas 80.000 inferencias lógicas borrosas por segundo. Diez años después la capacidad se había multiplicado por un factor de 30. La mayoría de las empresas de microprocesadores investigan el desarrollo de circuitos borrosos, aunque una buena parte de los productos ofrecidos comercialmente siguen basándose en microprocesadores corrientes a los que los ingenieros programan con unas pocas líneas de códigos de inferencia borrosa. A pesar de ello, el mercado mundial de los microprocesadores borrosos alcanza cuantías superiores a los miles de millones de dólares anuales.
2
MARCO TEÓRICO
En este capítulo se presentan teorías y conceptos que brindan una mejor comprensión acerca de las vibraciones que se generan en los fenómenos de transporte de fluidos. Se consideran aspectos importantes en la generación de los mismos así como se brinda información necesaria para comprensión de los sistemas de control y las tecnologías actuales que son utilizadas para su implementación.
2.1 VIBRACIONES EN TUBERÍAS
En las industrias de proceso intervienen muchos factores que contribuyen al mantenimiento de altos niveles de ruido y vibraciones, entre los cuales, los más importantes son generados durante el funcionamiento de bombas, turbinas y elementos de control instalados en tuberías que transportan líquidos, gases y vapores.
El cálculo para los niveles de ruido, de resonancia, cavitación y vibraciones inducidas por flujo es un problema que actualmente no puede resolverse de manera precisa debida al desconocimiento del valor de los distintos parámetros que intervienen. Las predicciones de éstos fenómenos se hacen empíricamente tomando como bases los múltiples datos tomados en ensayos realizados en condiciones de laboratorio.
Parte de la turbulencia generada por el aumento de velocidad del fluido hace vibrar la tubería en la descarga de una bomba provocando ondas de ruido radiadas a través de la tubería.
Dos son las principales causas de ruido en las tuberías y elementos hidráulicos: vibración mecánica y ruido hidrodinámico.
La vibración mecánica es debida a las fluctuaciones de presión casuales que se producen dentro de los álabes de turbinas y al choque del fluido contra las paredes de los álabes de las mismas. Estos fenómenos dan lugar a la vibración del elemento correspondiente.
El ruido hidrodinámico es producido al circular los líquidos a través de una válvula, pudiendo encontrarse en varios estados: sin cavitación, con cavitación y con vaporización.
2.2 CAVITACIÓN
La cavitación es la formación y posterior colapso (implosión) de burbujas de gas (cavidades) en el seno de un fluido. El gas puede ser aire, gas disuelto en el líquido considerado o normalmente vapor del propio líquido. Cuando la presión de un fluido baja hasta un valor cercano a la presión de vapor para las condiciones termodinámicas existentes (temperatura) el fluido comienza a ebullir. Se produce la formación de microburbujas en el seno del líquido. La idea fundamental es que el estado de ebullición (ese punto de equilibrio líquido-vapor) se alcanza por dos vías fundamentales:
En líquidos en reposo.
Aumentado la temperatura a presión constante, llega un momento en que se alcanza la curva de cambio de fase (por ejemplo al calentar agua).
En líquidos en movimiento.
Figura 1.- Generación de cavitación en la restricción de una tubería.
Figura 2.- Generación de cavitación en una turbina hidráulica
2.2.1 PRINCIPALES EFECTOS Y CONSECUENCIAS DE LA CAVITACIÓN
La cavitación es un fenómeno muy importante de la mecánica de los fluidos y de particular influencia en el funcionamiento de toda máquina hidráulica.
En las últimas décadas la tecnología del diseño de turbinas y bombas centrífugas ha tenido un avance importante, el cual sumado a los incrementos en los costos de fabricación, ha llevado a desarrollar equipos con mayores velocidades específicas para minimizar esta influencia, lo que determina un incremento en el riesgo de problemas en la succión, especialmente cuando operan fuera de su condición de diseño.
Bloqueo: La aparición de burbujas reduce la sección de paso del flujo.
Pérdida de prestaciones: Cae la curva característica de las bombas hidráulicas.
Inestabilidades por vibración y ruido: Generado por el colapso de burbujas: típico ruido como si se transportasen bolas de acero en las tuberías.
fenómeno inevitable, sino un efecto que debe ser juzgado y evaluado desde el punto de vista económico. En el caso de las turbomáquinas hidráulicas la cavitación es un factor determinante, marcando el límite más bajo para el tamaño de la máquina y también el límite más alto para la velocidad del flujo medio (velocidad periférica del rotor).
Figura 3.- Cavitación en el álabe de una turbina
A fin de producir una cavidad en un líquido, debe primero ser estirado y posteriormente desgarrado. Si el líquido es considerado como un sólido, esto es inducido por un esfuerzo de tracción. Por lo tanto, la facultad de un líquido de soportar este esfuerzo de tracción es llamada resistencia a la tracción.
Pero el fenómeno de cavitación ocurre precisamente a bajas presiones, ello quiere decir que en la práctica los líquidos ya están "desgarrados". A estas fracturas previas se las denomina "núcleos de cavitación" mencionados anteriormente, y son los iniciadores del proceso. Estos núcleos son diminutas burbujas de gases adheridas a materiales sólidos presentes en los líquidos, burbujas retenidas en fisuras en los conductos de transporte del mismo, o gases absorbidos por el líquido.
Estos núcleos al ser sometidos a una zona de baja presión comienzan a expandirse. Si aún sigue disminuyendo la presión en una magnitud tal que se alcance la presión de vapor del fluido a la temperatura respectiva, entonces el líquido que rodea a este núcleo (micro burbuja) se vaporiza y comienza a crecer hasta que se hace visible en forma de burbuja.
2.2.2 TIPOS DE CAVITACION
Existen dos tipos de cavitación, uno con flujo y otro estando el líquido estático.
(a) Cavitación por flujo: Los tenemos en tuberías donde la presión estática del líquido alcanza valores próximos al de la presión de vapor del mismo, tal como puede ocurrir en la garganta de un tubo venturi, a la entrada del rodete de una bomba centrífuga o a la salida del rodete de una turbina hidráulica de reacción.
(b) Cavitación por ondas: aparecen cuando estando el líquido en reposo, por él se propagan ondas, como las ultrasónicas denominándose Cavitación Acústica, o típicas ondas por reflexión sobre paredes o superficies libres debido a ondas de compresión o expansión fruto de explosiones y otras perturbaciones como en el caso del golpe de ariete, denominadas Cavitación por Shock.
2.2.3 CONTENIDOS DE GAS
Los altos contenidos de gas parecen favorecer el comienzo de la cavitación, debido a que originan una mayor cantidad de burbujas. Por otra parte un contenido elevado de aire (presión parcial de aire) disminuye la velocidad de implosión.
Con un contenido bajo de gas se demora el comienzo de la cavitación, ya que la resistencia a la tracción del agua en este caso comienza a jugar un papel considerable. Con elevados contenidos de aire la presión para el comienzo de la cavitación es superior a la presión de vapor, ya que en este caso el crecimiento de las burbujas está favorecido por la difusión de gas en el líquido.
La bolsa, ya aumentada de tamaño, es arrastrada a una región de mayor presión y finalmente estalla, mejor dicho, implota. Esta acción periódica está generalmente asociada a un fuerte ruido crepitante.
El aumento de tamaño de las burbujas o bolsas reduce los pasajes aumentando así la velocidad de escurrimiento y disminuyendo por lo tanto más aun la presión. Tan pronto como la presión en la corriente supera la tensión de vapor después de pasar la sección más estrecha, se produce la condensación y el colapso de la burbuja de vapor. La condensación tiene lugar instantáneamente. El agua que rodea a las burbujas que estallan golpean entonces las paredes u otras partes del fluido, sin amortiguación alguna.
demostrándose que la tensión superficial acelera la implosión y aumenta los efectos de la presión.
Muchos efectos trae aparejado el colapso de la burbuja, relacionados con los diferentes parámetros tales como la influencia del gradiente de presión, la deformación inicial en la forma de la burbuja, velocidad del fluido en la vecindad de los límites sólidos, etc.
2.3 CONTROL AUTOMÁTICO
El control automático ha desempeñado una función vital en el avance de la ingeniería y la ciencia, es una parte importante e integral de los procesos modernos industriales y de manufactura. Prácticamente, cada aspecto de las actividades de nuestra vida diaria está afectado por algún tipo de sistema de control. Los sistemas de control se encuentran en gran cantidad en todos los sectores de la industria tales como control de calidad de los productos manufacturados, líneas de ensamble automático, control de máquina-herramienta, sistemas de transporte, sistemas de potencia, robótica, etc., aún el control de inventarios y los sistemas económicos y sociales se pueden analizar a través de la teoría de control automático.
Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia, determina la desviación y produce una señal de control que reducirá la desviación a cero o a un valor pequeño. La manera en la cual el controlador automático produce la señal de control se denomina acción de control. En un sistema de control en lazo cerrado, se alimenta al controlador la señal de error de actuación, que es la diferencia entre la señal de entrada y la señal de realimentación (que puede ser la señal de salida misma o una función de la señal de salida y sus derivadas y/o integrales), a fin de reducir el error y llevar la salida del sistema a un valor conveniente. En la figura 4 se presenta el esquema básico de un sistema de control a lazo cerrado. El término control en lazo cerrado siempre implica el uso de una acción de control realimentado para reducir el error del sistema.
2.4 CLASIFICACIÓN DE LOS CONTROLADORES INDUSTRIALES
Los controladores industriales se clasifican, de acuerdo con sus acciones de control, como:
De dos posiciones o de encendido y apagado (on/off) Proporcionales
Integrales
Proporcionales-integrales Proporcionales-derivativos
Proporcionales-integrales-derivativos
Casi todos los controladores industriales emplean como fuente de energía la electricidad o un fluido presurizado, tal como el aceite o el aire. Los controladores también pueden clasificarse, de acuerdo con el tipo de energía que utilizan en su operación, como neumáticos, hidráulicos o electrónicos.
El tipo de controlador que se use debe decidirse con base en la naturaleza de la planta y las condiciones operacionales, incluyendo consideraciones tales como seguridad, costo, disponibilidad, confiabilidad, precisión, peso y tamaño.
2.4.1 ACCIÓN DE CONTROL DE DOS POSICIONES O DE ENCENDIDO Y APAGADO (ON/OFF)
En un sistema de control de dos posiciones, el elemento de actuación solo tiene dos posiciones fijas que, en muchos casos, son simplemente encendido y apagado. El control de dos posiciones o de encendido y apagado es relativamente simple y barato, razón por la cual su uso es extendido en sistemas de control tanto industriales como domésticos.
Es común que los controladores de dos posiciones sean dispositivos eléctricos, en cuyo caso se usa extensamente una válvula eléctrica operada por solenoides. Los controladores neumáticos proporcionales con ganancias muy altas funcionan como controladores de dos posiciones y, en ocasiones, se denominan controladores neumáticos de dos posiciones. Una aplicación de éste tipo de control en la industria es utilizado para el control de nivel en tanque de almacenamiento tal y como se muestra en la Figura 5
Figura 5.- Sistema de control del líquido que es controlado por una acción de control de dos posiciones
2.4.2 ACCIÓN DE CONTROL PROPORCIONAL
Para un controlador con acción de control proporcional, la relación entre la salida del controlador u(t) y la señal de error e(t) es:
O bien, en cantidades transformadas por el método de Laplace
en donde Kp se considera la ganancia proporcional
Cualquiera que sea el mecanismo real y la forma de la potencia de operación, el controlador proporcional es, en esencia, un amplificador con una ganancia ajustable. El controlador proporcional es el tipo más simple de controlador, con excepción del controlador de dos estados, la ecuaci6n con que se describe su funcionamiento es la siguiente:
Ó bien
Donde:
m(t) = salida del controlador, psig o mA
r(t) = punto de control, psig o mA
e(r) = señal de error, psi o mA; ésta es la diferencia entre el punto de control y la variable que se controla.
Kc = ganancia del controlador, psi/psi ó mA/mA
= valor base, psig o mA.
Es interesante notar que la ecuación (1.2) es para un controlador de acción inversa; si la variable que se controla, c(f), se incrementa en un valor superior al punto de control, r(t), el error se vuelve negativo y, como se ve en la ecuación, la salida del controlador, m(t), decrece. La manera común con que se designa matemáticamente un controlador de acción directa es haciendo negativa la ganancia del controlador, Kc; sin embargo, se debe recordar que en los controladores industriales no hay ganancias negativas, sino únicamente positivas, lo cual se resuelve con el selector inverso/directo. La Kc negativa se utiliza cuando se hace el análisis matemático de un sistema de control en el que se requiere un controlador de acción directa.
En las ecuaciones (1.2) y (1.3) se ve que la salida del controlador es proporcional al error entre el punto de control y la variable que se controla; la proporcionalidad la da la ganancia del controlador, K, con esta ganancia o sensibilidad del controlador se determina cuánto se modifica la salida del controlador con un cierto cambio de error. Esto se ilustra en la figura 6.
Figura 6.- Efecto de la ganancia del controlador sobre la salida del controlador. (a) Controlador de acción directa. (b) Controlador de acción inversa.
operación de diseño son qi = qo = 150 gpm y h = 6 pies; supóngase también que, para que pasen 150 gpm por la válvula de salida la presión de aire sobre ésta debe ser de 9 psig. Si el flujo de entrada se incrementa, qi, la respuesta del sistema con un controlador proporcional es como se ve en la figura 7. El controlador lleva de nuevo a la variable a un valor estacionario pero este valor no es el punto de control requerido; la diferencia entre el punto de control y el valor de estado estacionario de la variable que se controla es la desviación. En la figura 8 se muestran dos curvas de respuesta que corresponden a dos diferentes valores del parámetro de ajuste Kc. En la figura se aprecia que cuanto mayor es el valor de Kc, tanto menor es la desviación, pero la respuesta del proceso se hace más oscilatoria; sin embargo, para la mayoría de los procesos existe un valor máximo de Kc, más allá del cual el proceso se hace inestable.
Figura 7.- Circuito para control proporcional de nivel.
2.4.3 CONTROLADOR PROPORCIONAL-INTEGRAL
La mayoría de los procesos no se pueden controlar con una desviación, es decir, se deben controlar en el punto de control, y en estos casos se debe añadir inteligencia al controlador proporcional, para eliminar la desviación. Esta nueva inteligencia o nuevo modo de control es la acción integral o de reajuste y en consecuencia, el controlador se convierte en un controlador proporcional-integral (PI). La siguiente es su ecuación descriptiva:
[image:20.595.118.482.486.690.2]
donde = tiempo de integración o reajuste minutos/repetición. Por lo tanto, el controlador PI tiene dos parámetros, Kc, y , que se deben ajustar para obtener un control satisfactorio. Para entender el significado físico del tiempo de reajuste, , considérese el ejemplo hipotético que se muestra en la figura 9, donde 7, es el tiempo que toma al controlador repetir la acción proporcional y, en consecuencia, las unidades son minutos/repetición. Tanto menor es el valor de , cuanto más pronunciada es la curva de respuesta, lo cual significa que la respuesta del controlador se hace más rápida.
Otra manera de explicar esto es mediante la observación de la ecuación (1.4), tanto
menor es el valor de TI, cuanto mayor es el término delante de la integral, , y, en
consecuencia, se le da mayor peso a la acción integral o de reajuste.
De la ecuación (1.4) también se nota que, mientras está presente el término de error, el controlador se mantiene cambiando su respuesta y, por lo tanto, integrando el error, para eliminarlo; recuérdese que integración también quiere decir sumatoria.
La función de Transferencia del controlador es:
en donde Kp, es la ganancia proporcional y Ti se denomina tiempo integral. Tanto Kp como Ti son ajustables. El tiempo integral ajusta la acción de control integral, mientras que un cambio en el valor de Kp afecta las partes integral y proporcional de la acción de control. El inverso del tiempo integral Ti se denomina velocidad de reajuste. La velocidad de reajuste es la cantidad de veces por minuto que se duplica la parte proporcional de la acción de control. La velocidad de reajuste se mide en términos de las repeticiones por minuto. La figura 10(a) muestra un diagrama de bloques de un controlador proporcional más integral. Si la señal de error e(t) es una función escalón unitario, como se aprecia en la figura 10(b), la salida del controlador u(t) se convierte en lo que se muestra en la figura 9(c).
2.4.4 CONTROLADOR PROPORCIONAL-INTEGRAL-DERIVATIVO (PID)
Algunas veces se añade otro modo de control al controlador PI, este nuevo modo de control es la acción derivativa, que también se conoce como rapidez de derivación o preactuación; tiene como propósito anticipar hacia dónde va el proceso, mediante la observación de la rapidez para el cambio del error, su derivada. La ecuación descriptiva es la siguiente:
Donde rapidez de variación en minutos.
Por lo tanto, el controlador PID se tiene tres parámetros, Kc o PB, y que se deben ajustar para obtener un control satisfactorio. Nótese que solo existe un parámetro para ajuste de derivación, , el cual tiene las mismas unidades, minutos, para todos los fabricantes. Como se acaba de mencionar, con la acción derivativa se da al controlador la capacidad de anticipar hacia dónde se dirige el proceso, es decir, “ver hacia adelante”, mediante el cálculo de la derivada del error. La cantidad de “anticipación” se decide mediante el valor del parámetro de ajuste, .
Los controladores PID se utilizan en procesos donde las constantes de tiempo son largas. Ejemplos típicos de ello son los circuitos de temperatura y los de concentración. Los procesos en que las constantes de tiempo son cortas (capacitancia pequeña) son rápidos y susceptibles al ruido del proceso, son característicos de este tipo de proceso los circuitos de control de flujo y los circuitos para controlar la presión en corrientes de líquidos. Considérese el registro de flujo que se ilustra en la figura 11, la aplicación del modo derivativo solo da como resultado la amplificación del ruido, porque la derivada del ruido, que cambia rápidamente, es un valor grande. Los procesos donde la constante de tiempo es larga (capacitancia grande) son generalmente amortiguados y, en consecuencia, menos susceptibles al ruido; sin embargo, se debe estar alerta, ya que se puede tener un proceso con constante de tiempo larga, por ejemplo, un circuito de temperatura, en el que el transmisor sea ruidoso, en cuyo caso se debe reparar el transmisor antes de utilizar el controlador PID.
La función de transferencia de un controlador PID ideal se obtiene a partir de la ecuación (1.8), la cual se reordena como sigue:
Definiendo las variables de desviación
Se obtiene la transformada de Laplace y se reordena para obtener:
Esta función de transferencia se conoce como “ideal” porque en la práctica es imposible implantar el cálculo de la derivada, por lo cual se hace una aproximación mediante la utilización de un adelanto/retardo, de lo que resulta la función de transferencia “real”:
Los valores típicos de están entre 0.05 y 0.1.
En resumen, los controladores PID tienen tres parámetros de ajuste: la ganancia o banda proporcional, el tiempo de reajuste o rapidez de reajuste y la rapidez derivativa. La rapidez derivativa se da siempre en minutos. Los controladores PID se recomiendan para circuitos con constante de tiempo larga en los que no hay ruido. La ventaja del modo derivativo es que proporciona la capacidad de “ver hacia dónde se dirige el proceso”.
2.5 LÓGICA DIFUSA
La lógica difusa permite representar el conocimiento común, que es mayoritariamente del tipo lingüístico cualitativo y no necesariamente cuantitativo, en un lenguaje matemático a través de la teoría de conjuntos difusos y funciones características asociadas a ellos. Permite trabajar a la vez con datos numéricos y términos lingüísticos; los términos lingüísticos son inherentemente menos precisos que los datos numéricos pero en muchas ocasiones aportan una información más útil para el razonamiento humano.
Es la lógica que utiliza expresiones que no son ni totalmente ciertas ni completamente falsas, es decir, es la lógica aplicada a conceptos que pueden tomar un valor cualquiera de veracidad dentro de un conjunto de valores que oscilan entre dos extremos, la verdad absoluta y la falsedad total. Conviene recalcar que lo que es difuso, borroso, impreciso o vago no es la lógica en sí, sino el objeto que estudia: expresa la falta de definición del concepto al que se aplica.
La lógica difusa permite tratar información imprecisa, como estatura media o temperatura baja, en términos de conjuntos borrosos que se combinan en reglas para definir acciones: si la temperatura es alta entonces enfriar mucho. De esta manera, los sistemas de control basados en lógica difusa combinan variables de entrada, definidas en términos de conjuntos difusos, por medio de grupos de reglas que producen uno o varios valores de salida.
2.5.1 CONJUNTOS DIFUSOS Y FUNCIONES CARACTERÍSTICAS
El primer ejemplo utilizado por Zadeh, para ilustrar el concepto de conjunto difuso, fue el conjunto “hombres altos”. Según la teoría de la lógica clásica el conjunto “hombres altos” es un conjunto al que pertenecerían los hombres con una estatura mayor a un cierto valor, que podemos establecer en 1.80 metros, por ejemplo, y todos los hombres con una altura inferior a este valor quedarían fuera del conjunto. Así tendríamos que un hombre que mide 1.81 metros de estatura pertenecería al conjunto hombre altos, y en cambio un hombre que mida 1.79 metros de altura ya no pertenecería a ese conjunto. Sin embargo, no parece muy lógico decir que un hombre es alto y otro no lo es cuando su altura difiere en dos centímetros.
Figura 12 : Lógica clásica versus lógica difusa
Así pues, los conjuntos difusos pueden ser considerados como una generalización de los conjuntos clásicos, la teoría clásica de conjuntos sólo contempla la pertenencia o no pertenencia de un elemento a un conjunto, sin embargo la teoría de conjuntos difusos contempla la pertenencia parcial de un elemento a un conjunto, es decir, cada elemento presenta un grado de pertenencia a un conjunto difuso que puede tomar cualquier valor entre 0 y 1. Este grado de pertenencia se define mediante la función característica asociada al conjunto difuso: para cada valor que pueda tomar un elemento o variable de entrada x la función característica mA(x) proporciona el grado de pertenencia de este
valor de x al conjunto difuso A.
Formalmente, un conjunto clásico A, en un universo de discurso U, se puede definir de varias formas: enumerando los elementos que pertenecen al conjunto, especificando las propiedades que deben cumplir los elementos que pertenecen a ese conjunto o, en términos de la función de pertenencia μA(x):
Podemos además decir que el conjunto A es matemáticamente equivalente a su función de pertenencia o característica (x) A m , ya que conocer (x) A m es lo mismo que conocer
A. Un conjunto difuso en el universo de discurso U se caracteriza por una función de pertenencia μA(x) que toma valores en el intervalo [0.1], y puede representarse como un conjunto de pares ordenados de un elemento x y su valor de pertenencia al conjunto:
Función de pertenencia triangular
Una función de pertenencia triangular se especifica mediante tres parámetros {a, b, c}, de la siguiente forma:
A continuación se representa en la Figura 13 un ejemplo de la función de pertenecía
triangular con los siguientes parámetros
μ
triángulo (x; 20, 60, 80).Figura 13.- Ejemplo de función de pertenencia triangular
Función de pertenencia Gaussiana
Una función de pertenencia gaussiana se especifica con dos parámetros { c, }; c representa el centro de la FM y determina su anchura.
A continuación se representa en la Figura 14 un ejemplo de la función de pertenecía
gaussiana con los siguientes parámetros
μ
gaussiana (x; 3, 1).Figura 14.- Ejemplo de función de pertenencia gaussiana
2.5.2 OPERACIONES CON CONJUNTOS DIFUSOS
Las operaciones básicas entre conjuntos difusos son las siguientes:
El conjunto complementario A de un conjunto difuso A es aquel cuya función de
pertenencia característica viene definida por:
La unión de dos conjuntos difusos A y B es un conjunto difuso A U B en
μ
cuyafunción de pertenencia es:
La intersección de dos conjuntos difusos A y B es un conjunto difuso A ∩ B en
μ
con función de pertenencia característica es:2.5.3 REGLAS DIFUSAS
Los conjuntos y los operadores difusos son los sujetos y predicados de la lógica difusa. Las reglas si-entonces son usadas para formular las expresiones condicionales que abarca la lógica difusa como por ejemplo:
• Si x es A Entonces y es B
Donde A y B son los valores lingüísticos definidos por los conjuntos definidos en los rangos de los universos de discurso llamados X e Y, respectivamente.
La parte “si” de la regla “x es A” es llamada el antecedente o premisa, mientras la parte “entonces” de la regla “y es B” es llamada la consecuencia o conclusión
2.6 CONTROL DIFUSO
La información numérica que proveen los sensores, es la fuente única de información en las aproximaciones convencionales a problemas de ingeniería, mientras que difícilmente incorporamos la información lingüística. Debido a que hay gran cantidad de conocimiento almacenado en términos lingüísticos, es muy importante incorporarlo dentro de los problemas de ingeniería de manera sistemática y eficiente, máxime cuando corresponde a una forma muy cercana de describir el conocimiento humano.
conjunto de estructuras básicas cuyo comportamiento se aproxima a los controladores clásicos del tipo Proporcional (P), Integral (I) o Derivativo (D). Donde estas denominaciones dependen del procesamiento que se realice sobre la señal de error antes de entrar al sistema de inferencia difuso.
El control difuso representa actualmente una novedosa e importante rama de la técnica de regulación. Los procedimientos convencionales no se sustituyen, sino que se complementan de forma considerable en función del campo de aplicación. Los mayores éxitos en el campo de las aplicaciones industriales y comerciales de los métodos difusos los ha logrado hasta la fecha el regulador difuso.
Las funciones de pertenencia son modelos matemáticos para los términos lingüísticos, como por ejemplo las funciones de pertenencia triangulares, trapezoidales o gaussianas. Como en el caso de un regulador convencional, en el regulador difuso se transforman variables de entrada en variables de salida, que actúan en el proceso o en el sistema de control. Múltiples variables de entrada y salida se pueden enlazar entre sí de forma que sistemas complejos se pueden regular fácilmente. Los valores de entrada y salida son valores exactos en forma de señales. La imprecisión típica de los métodos difusos desempeña un papel sólo dentro del regulador. Los controladores difusos se pueden desarrollar empleando diferentes tipos de métodos clasificados según su nivel de complejidad.
2.6.1 MÉTODOS DIFUSOS
Los métodos de inferencia difusa se clasifican en métodos directos y métodos indirectos. Los directos son los más utilizados, como por ejemplo los de Mamdani y Sugeno (estos dos métodos se diferencian en la forma de obtener las salidas). Los métodos indirectos son más complejos. Una clasificación se muestra en la Figura 15 donde se incluye el método más utilizado, se trata del método Mamdani.
2.6.2 MÉTODO DE MAMDANI
El método de Mamdani es el más usado en aplicaciones, dado que tiene una estructura muy simple de operaciones “mínimo-máximo”
Paso 1.- Evaluación del antecedente en cada regla
Dadas las entradas (valores numéricos) se obtienen los distintos valores de pertenencia para cada una de ellas. A esto se le llama “fuzzyficación de la entrada”. Si el antecedente de la regla tiene más de un término, a continuación se aplica algún operador obteniendo un único valor de pertenencia.
Paso 2.- Obtener la conclusión en cada regla
A partir del consecuente de cada regla (un conjunto borroso) y del valor del antecedente obtenido en el paso 1, aplicamos un operador difuso de implicación obteniendo así un nuevo conjunto difuso.
Dos de los operadores de implicación más usados son el mínimo, que trunca la función de pertenencia del consecuente, y el producto, que la escala.
Paso 3.- Agregar conclusiones
Las salidas obtenidas para cada regla en el paso 2 (obtener conclusión), se combinan en un único conjunto difuso utilizando un operador de agregación difuso.
Paso 4.- Defuzzificación
Cuando intentamos obtener una solución a un problema de decisión, lo que queremos obtener como salida es un número y no un conjunto borroso. Tenemos que transformar el conjunto borroso obtenido en el paso 3 en un número. Uno de los métodos más utilizados es el del Centroide, que calcula el centro del área definida por el conjunto borroso obtenido en el paso 3.
2.7 APLICACIONES DEL CONTROL DIFUSO.
En este momento, bajo el impulso del profesor Sugeno, del Instituto Tecnológico de Tokio, los industriales japoneses comenzaron a interesarse seriamente en el control mediante lógica difusa. La primera gran aplicación fue el tren electromagnético de Sendai construido en 1986 por la sociedad Hitachi, cuyo desempeño (precisión, confort y ahorro energético) rivalizaba con aquellos del control clásico.
Desde entonces, cientos de aplicaciones han salido a la luz en diversos ámbitos y esencialmente en Japón. Citaremos solo algunos: hornos de cemento, plantas de tratamiento de aguas, estabilizadores de imagen en videocámaras, purificadores domésticos de agua, selección automática del programa de lavado de ropa, control del ciclo de cocción en hornos de microondas, aires acondicionados, transmisiones automáticas en automóviles, sistemas antibloqueo de frenos, etc.
Todas estas aplicaciones muestran resultados muy alentadores, sin embargo debemos ser prudentes a la hora de decidir qué tipo de estrategia de control queremos aplicar a nuestro propio proceso. En efecto, uno de los más grandes abusos de la comunidad partidaria del control difuso, es el afirmar que todo proceso puede ser controlado con lógica difusa y obtener desempeños superiores a aquellos obtenidos por técnicas de control convencional.
2.7.1 VENTAJAS Y LÍMITES DEL CONTROLADOR DIFUSO
Las regulaciones multivariables se pueden realizar de forma rápida, comprensible y orientada hacia problemas. Esto se aplica sobre todo cuando no hay ningún modelo de sistema controlado o cuando el modelo presenta una estructura no-lineal desfavorable.
El comportamiento de un sistema se describe con expresiones lingüísticas, por lo que es más sencillo que una descripción matemática. La base de reglas y la definición de la cantidad difusa se pueden ampliar o adaptar con posterioridad.
Si se diseña un regulador difuso directamente, se basa en las experiencias de los reguladores existentes o las personas. Por este motivo, los fallos en la fase de creación apenas se pueden corregir con posterioridad.
Con la creciente complejidad del sistema crece de forma sobreproporcional el trabajo necesario para el desarrollo de un regulador difuso. Es difícil encontrar el método correcto en la desfuzzificación.
El cálculo del valor de salida exacto es:
a) complejo, lento y bueno
2.8 SOFTWARE PARA DESARROLLO DE ALGORITMOS DE CONTROL MATLAB
Matlab Es un ambiente de computo, de alta ejecución numérica y de visualización. MATLAB integra el análisis numérico, calculo de matrices, procesamiento de señales, y graficación, en un ambiente sencillo de utilizar, donde los problemas y sus soluciones son expresados justamente como están escritas; a diferencia de la programación tradicional. También cuenta con varias familias de soluciones para aplicaciones especificas llamadas cajas de herramientas (toolboxes), que son colecciones de funciones utilizadas para resolver alguna clase particular de problema. Las áreas en donde las cajas de herramientas están disponibles incluyen el procesamiento de señales, diseño de sistemas de control, la simulación de sistemas dinámicos, la identificación de sistemas, redes neuronales y otros.
Existen dos modos de ejecución de los comandos y funciones:
Interactiva
Con este modo se puede teclear directamente sobre el área de trabajo de MATLAB el comando o la función a ejecutar, permitiendo una ejecución paso a paso, así como el seguimiento de las variables y la graficación de los resultados intermedios.
Por programa
Se tiene que crear un archivo con la secuencia adecuada de comandos y funciones que se requiera, este archivo se puede realizar desde cualquier editor o bien desde el editor de MATLAB, asegurándose que el archivo sea llamado <nombre>.m (a estos archivos se les conoce como archivo-m (m-file).
Lo que hay que recalcar es que MATLAB, basa su manejo de variables a partir de la asignación de vectores o de matrices, lo importante es que estos, no necesitan declararse previamente y tampoco dimensionarse, como se hace en la programación tradicional.
2.8.1 IMPLEMENTACIÒN DE LÓGICA DIFUSA EN MATLAB.
difusas en una aplicación en específico, por lo tanto la caja de herramientas amplifica grandemente el poder del razonamiento humano.
2.9 MICROCONTROLADOR
Es un circuito integrado programable que contiene todos los componentes de un computador. Se emplea para controlar el funcionamiento de una tarea determinada y, debido a su reducido tamaño, suele ir incorporado en el propio dispositivo al que gobierna. Esta última característica es la que le confiere la denominación de controlador integrado. El microcontrolador es un computador dedicado. En su memoria sólo reside un programa destinado a gobernar una aplicación determinada; sus líneas de entrada/salida soportan el conexionado de los sensores y actuadores del dispositivo a controlar, y todos los recursos complementarios disponibles tienen como única finalidad atender sus requerimientos. Una vez programado y configurado el microcontrolador solamente sirve para gobernar la tarea asignada. En la Figura 16 se presenta la forma en la que el microcontrolador se comunica con el exterior, esto es, a través de dispositivos periféricos de entrada y salida.
Figura 16.- Comunicación a través de periféricos con un microcontrolador
El microcontrolador en un sistema cerrado. Todas las partes del computador están contenidas en su interior y sólo salen al exterior las líneas que gobiernan los periféricos. Un microcontrolador posee todos los componentes de un computador, pero con unas características fijas que no pueden alterarse. Las partes principales de un microcontrolador son:
1. Procesador
2. Memoria no volátil para contener el programa
3. Memoria de lectura y escritura para guardar los datos 4. Líneas de EIS para los controladores de periféricos 5. Recursos auxiliares:
a) Circuito de reloj b) Temporizadores
2.9.1 PIC16F628A
Microchip es la empresa que fabrica los microcontroladores PIC. En los últimos tiempos esta familia de microcontroladores ha revolucionado el mundo de las aplicaciones electrónicas. Tienen una facilidad de uso y programación tales, que junto a las inmensas posibilidades de E/S que brindan han conquistado a programadores y desarrolladores. Su principal ventaja (y según sus detractores la principal desventaja) es su carácter general, la flexibilidad que les permite ser empleados en casi cualquier aplicación. Otras familias de microcontroladores son más eficaces en aplicaciones específicas. En la figura 17 se muestra la estructura física del microcontrolador PIC16F628a en el encapsulado comercial tipo PDIP.
Figura 17.- Estructura física del Pic16f628a
La gama básica consiste en una serie de PIC de recursos limitados, pero con una de las mejores relaciones coste/prestaciones de la familia. Sus versiones están encapsuladas con 18 y 28 pines y pueden alimentarse a partir de una tensión de 2,5 V, lo que les hace ideales en las aplicaciones que funcionan con pilas teniendo en cuenta su bajo consumo (menos de 2 mA a 5 V y 4 MHz). Tienen un repertorio de 33 instrucciones cuyo formato consta de 12 bits. Al igual que todos los miembros de la familia PIC16/17, los componentes de la gama básica se caracterizan por poseer los siguientes recursos: Sistema “Power On Reset”, Perro guardián (Watchdog o WDT), Código de protección, etc.
El PIC16f628a se trata de un microcontrolador CMOS de 8 bits con tecnología “nanoWattt” y que está basado en memoria Flash, así mismo es fabricado en encapsulado PDIP de 18 pines. En la Figura 18 se muestra una breve descripción de la distribución de pines en el microcontrolador. Características de periféricos:
16 pines de entrada/salida con dirección individual de control
Alta corriente tipo sink/source para manejar directamente LED’s.
Módulo comparador analógico
2 timers de 8 bits y uno de 16 bits
Figura 18.- Distribución del pines del Pic16f6281
2.9.2 LENGUAJES DE PROGRAMACIÓN PARA MICROCONTROLADORES
La utilización de los lenguajes más cercanos a la máquina (de bajo nivel) representan un considerable ahorro de código en la confección de los programas, lo que es muy importante dada la estricta limitación de la capacidad de la memoria de instrucciones. Los programas bien realizados en lenguaje Ensamblador optimizan el tamaño de la memoria que ocupan y su ejecución es muy rápida. Los lenguajes de alto nivel más empleados con microcontroladores son el C y el BASIC, de los que existen varias empresas que comercializan versiones de compiladores e intérpretes para diversas familias de microcontroladores. Realmente cuando cargamos (quemamos) un PIC con un programa no lo hacemos con ningún lenguaje, en realidad lo cargamos con OPCODES o “códigos de operación” que por lo general están en base hexadecimal, sin importar la gama de PIC baja, media ó alta.
2.9.3 COMPARATIVA DE LOS LENGUAJES DE PROGRAMACIÓN.
1. El lenguaje BASIC:
Ventajas:
Es un lenguaje muy simple y con instrucciones fácilmente legibles, incluso por no expertos.
Desventajas:
Tiene limitaciones cuando genera el archivo .hex, es decir no optimiza el tamaño de memoria de programa del PIC.
2. Lenguaje C:
Ventajas:
Puedes construir rutinas matemáticas fácilmente.
Puede ser de ayuda al combinarlo con Ensamblador sobre todo en la gama alta.
Es aceptado por la empresa fabricante Microchip, incluso ellos tienen algunos compiladores C.
Desventajas:
Los programas al compilarlos pueden resultar un poco extensos y pesados por ello debe tenerse en cuenta la capacidad de memoria de programa del PIC a utilizar.
3. Lenguaje Ensamblador:
Ventajas:
Es el lenguaje de bajo nivel natural de la línea PIC tanto para gama baja, media o alta.
Con él se tiene un aprovechamiento eficiente de los recursos del PIC, además es excelente para manejar interrupciones simultáneas.
Cuando se genera el archivo .hex éste es completamente optimizado.
Desventajas:
Cuando no se tiene experiencia en programación puede tardarse el desarrollo de alguna rutina en comparación con los otros lenguajes
2.9.4 AMBIENTES DE DESARROLLO INTEGRADO PARA LA PROGRAMACIÓN DE MICROCONTROLADORES PIC.
Microcode studio
El explorador de código permite saltar automáticamente para incluir archivos, definiciones, constantes, variables, alias y los modificadores, símbolos y etiquetas, que son contenidos dentro del código fuente. Permite identificar y corregir errores en la compilación del código fuente.
Figura 19.- Entorno de programación MicroCode Studio
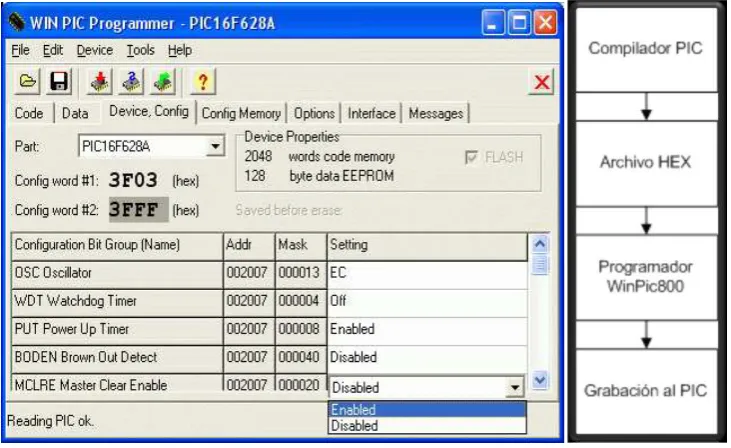
WIN PIC 800
Se trata de un software para la grabación de microcontroladores de la familia PIC en el entorno de Windows. La figura 20 muestra el ambiente de desarrollo integrado bajo la plataforma de Microsoft Windows.
2.10 MEDIDORES DE FLUJO
En la mayoría de las operaciones realizadas en los procesos industriales y en las efectuadas en laboratorio y en plantas piloto es muy importante la medición de caudal de líquido.
Existen dos tipos de medidores, los volumétricos que determinan el caudal en volúmen del fluido, y los de masa que determinan el caudal masa. Se reservan los medidores volumétricos para la medida general de caudal y se destinan los medidores de caudal másico a aquellas aplicaciones en que la exactitud de la medida es importante, por ejemplo las determinaciones finales del caudal del producto para su facturación. Los Medidores volumétricos se clasifican en:
Presión diferencial (Placa de orificio, Tobera, Tubo venturi, Tubo pitot, Tubo Annubar)
Área variable (Rotámetro)
Velocidad (Turbina, Sondas ultrasónicas)
Fuerza (Placa de impacto)
Tensión inducida (Medidor magnético)
2.10.1 MEDIDORES DE FLUJO TIPO TURBINA
Los medidores de turbina consisten en un rotor que gira al paso del fluido con una velocidad directamente proporcional al caudal. La velocidad del fluido ejerce una fuerza de arrastre en el rotor; la diferencia de presiones debida al cambio de área entre el rotor y el cono posterior ejerce una fuerza igual y opuesta. De este modo el rotor está equilibrado hidrodinámicamente y gira entre los conos anterior y posterior.
Existen 2 tipos de convertidores para captar la velocidad de la turbina. En el de reluctancia la velocidad viene determinada por el paso de las palas individuales de la turbina a través del campo magnético creado por un imán permanente montado en una bobina captadora exterior. El paso de cada pala varía la reluctancia del circuito magnético. Esta variación cambia el flujo induciendo en la bobina captadora una corriente alterna que, por lo tanto es proporcional al giro de la turbina.
La frecuencia que genera el rotor de turbina es proporcional al caudal siendo del orden de 250 a 1200 ciclos por segundo para el caudal máximo. Por ejemplo, si un rotor de seis palas gira a 100 revoluciones por segundo, genera 600 impulsos por segundo. El número de impulsos por unidad de caudal es constante. La turbina está limitada por la viscosidad del fluido, debido al cambio que se produce en la velocidad del perfil del líquido a través de la tubería cuando aumenta la viscosidad. En las paredes, el fluido se mueve más lentamente que en el centro, de modo que, las puntas de las palas no pueden girar a mayor velocidad.
El instrumento es adecuado para la medida de caudales de líquidos limpios o filtrados. La frecuencia generada por el medidor de turbina se transmite a un convertidor indicador o totalizador. En la figura 21 se muestra la constitución física característica de los medidores de flujo tipo turbina. Una aplicación importante de los medidores de turbina es la industria petroquímica, donde la mezcla de gas y petróleo es común, procedimientos especiales están siendo desarrollados para evitar grandes errores de medición.
Los medidores de turbina tienen un costo similar y comparten el mercado con los medidores de desplazamiento positivo, y son competentes para muchas aplicaciones, particularmente en la industria petrolera. Los medidores de turbina son pequeños y ligeros por lo que son preferidos para baja viscosidad y medición de alto flujo. Por lo tanto los medidores de desplazamiento positivo son superiores en condiciones de operación con alta viscosidad y bajo flujo.
La precisión es muy elevada, del orden de +- 0.3%. La máxima precisión se consigue con un régimen laminar instalando el instrumento en una tubería recta de las longitudes mínimas 15 diámetros aguas arriba y 6 diámetros aguas abajo. En la figura 22 se presenta la forma correcta de instalar el instrumento en una tubería de sección circular.
Figura 22.- Instalación correcta de un medidor de flujo tipo turbina.
Sus principales ventajas son:
Baja pérdida de carga.
La medición de agua con bajo contenido de sólidos en suspensión no afecta la medición.
Precisión del +- 0.3%.
Necesidad de tramos rectos con poca longitud
Rango de medición amplio.
Sus principales desventajas son:
Una buena cantidad de piezas con movimiento, lo que las hace frágiles propensas al desgaste.
Mayor necesidad de mantenimiento.
2.11 SENSOR DE EFECTO HALL
Hall encontró que si se aplica un campo magnético elevado a una fina lámina de oro por la que circula corriente, se produce un voltaje en la lámina transversalmente a como fluye la corriente, este voltaje se llama voltaje Hall. El voltaje producido es proporcional a la relación entre el valor del campo magnético y la magnitud de la corriente.
Considere electrones que se mueven en una placa conductora a la que se aplica un campo magnético en ángulo recto respecto al plano de la placa. Con consecuencia del campo magnético, los electrones que se desplazan se desvían hacia un lado de la placa que se carga negativamente, mientras el lado opuesto se carga positivamente ya que los electrones se alejan. La separación dura hasta que las fuerzas a las que están sujetas las partículas cargadas del campo eléctrico compensan las fuerzas producidas por el campo magnético.
La diferencia de potencial se genera entre las caras transversales a las que está conectada la corriente de la batería, en la Figura 23 se observa la forma en que se produce el voltaje Hall. El efecto Hall ocurre en conductores y semiconductores, en los conductores el voltaje generado es demasiado pequeño para tener aplicaciones prácticas, pero en algunos semiconductores el valor de este voltaje es mucho más grande y puede ser utilizado para tal fin.
La mayor parte de los generadores Hall se construyen de silicio más fácil y más resistente. Por lo general los sensores de efecto Hall están disponibles como circuitos integrados con los circuitos necesarios para procesar señales. Existen dos tipos básicos de este sensor:
Tipo Lineal: donde la salida varía de manera razonablemente lineal con la densidad de flujo magnético.
Tipo Umbral: Donde la salida cae en forma brusca cuando se presenta con cierta densidad de flujo magnético.
Los sensores de efecto Hall tienen la ventaja de funcionar como interruptores capaces de operar hasta una frecuencia de repetición de 100Khz, cuestan menos que los interruptores electromecánicos y no presentan los problemas relacionados con el rebote de los interruptores de contacto y de una secuencia de contactos en lugar de solo uno. El sensor de efecto Hall es inmune a los contaminantes ambientales y trabaja en condiciones de servicio severas.
Se coloca un imán en el flotador y conforme el nivel del combustible cambia, también se modifica la distancia que separa al flotador del sensor Hall.
Figura 23.- Generación de voltaje Hall en una lámina conductora
2.11.1 SENSOR DN6851
El sensor DN6851 es un circuito integrado semiconductor que utiliza el efecto Hall. Ha sido diseñado para operar en un campo magnético rotativo, especialmente con una fuente de voltaje baja. Este circuito integrado Hall es apropiado para varios tipos de instrumentos de medición, conmutadores y similares. El diagrama de bloques del sensor de efecto Hall se muestra en la figura 24.
Características:
Amplio rango de alimentación, 3.6 a 16 V Operación en campo magnético rotativo
Manejo de circuitos integrados TTL y CMOS en la salida.
El tiempo de vida del sensor es semipermanente porque emplea partes sin contacto.
Principales Aplicaciones del Sensor DN6851:
Sensor de velocidad Sensor de posición Sensor de rotación Micro conmutador
Figura 24.- Diagrama de bloques del sensor DN6851
2.12 MATERIALES EMPLEADOS EN SISTEMAS HIDRÁULICOS.
Resulta importante el conocer los materiales que se emplean en los sistemas de transporte y distribución de fluidos debido a que permite realizar diseños acorde a las necesidades del proceso. Además, el conocer las características de los materiales determina en gran medida la utilización del mismo por el costo que implica la selección de materiales y su durabilidad.
2.12.1 PVC
Es uno de los polímeros más estudiados y utilizados por el hombre para su desarrollo y confort, dado que por su amplia versatilidad es utilizado en áreas tan diversas como la construcción, energía, salud, preservación de alimentos y artículos de uso diario, entre otros.
Tabla 1.- Propiedades físicas del PVC
2.12.2 NYLAMID
Familia de las poliamidas (PA) nylon. Su combinación de propiedades mecánicas y eléctricas, su resistencia a la abrasión, ligereza (su peso es 1/7 del peso del bronce), facilidad de maquinado y amplia disponibilidad de presentaciones y medidas, han hecho del Nylamid®, el material ideal para la fabricación de diversas piezas; desde pequeños engranes, cojinetes, rodillos, ruedas y tornillos, hasta grandes coronas de engrane, de casi 2 metros de diámetro, usando las mismas maquinas y herramientas que se usan para el maquinado de metales.
Por su variedad de opciones, han satisfecho múltiples necesidades en el diseño de equipo original y también en la sustitución de materiales tan tradicionales como el bronce y el acero, aplicándolos en diversas maquinas de casi todos los sectores industriales, tales como; alimenticio, siderúrgico, naval, papelero, metalmecánico, etc.
reducir: la frecuencia de paros por mantenimiento, el consumo de energía eléctrica y lubricación así como el nivel de ruido, contribuyendo en la reducción de costos.
Primera alternativa para todo tipo de componentes de desgaste y estructurales
Gran resistencia al desgaste
Buenas propiedades mecánicas y eléctricas
Balance ideal de resistencia y tenacidad
Variedad de opciones: Normatividad higiénica, autolubricidad, resistencia térmica.
El más amplio rango de presentaciones y medidas disponibles
Tabla 2.- Propiedades mecánicas del Nylamid M
3
DESARROLLO DE INGENIERÍA
En éste capítulo se desarrollan los procedimientos que fueron llevados a cabo para la generación del proyecto. Se detalla el diseño y fabricación del medidor de flujo de agua, desde el diseño por computadora en 3D, hasta la integración mecánica y electrónica del mismo. Así mismo se describe el desarrollo para el diseño y simulación del controlador difuso que puede ser empleado en la reducción de vibraciones en un prototipo de pruebas propuesto, integrando el medidor de flujo desarrollado, el algoritmo de control difuso implementado en microcontrolador y las válvulas de control propuestas para la pues en marcha del prototipo de pruebas propuesto.
3.1 CASO DE PARTICULAR DE ESTUDIO.
Se plantea un diseño sobre el cual se puedan desarrollar trabajos de control de vibraciones mediante la experimentación en un sistema real. El sistema debe contener al menos 3 medidores de flujo, 2 válvulas de control, 1 controlador que permita implementar reglas de control difuso, y una bomba de alimentación, así como una red de tuberías para el ensamble del sistema con el cual se pueda realizar experimentación de manera física como parte de la corroboración de las simulaciones que se realizan.
descripción de cada uno de los elementos que componen el sistema propuesto, ya sea que correspondan los pasos de la fabricación o adquisición del equipo necesario.
3.2 DISEÑO DE UN INSTRUMENTO DE MEDICIÒN DE FLUJO
En primer lugar se evaluaron las distintas formas en que se puede medir flujo y se eligió el tipo turbina ya que en su operación el flujo que pasa a través de los álabes de las turbina es proporcional a las revoluciones por minuto de la misma. Debido a que éste tipo de elementos resultan demasiado caros para ser costeados se buscó algún elemento que tuviera una turbina y que pudiera adaptarse a la idea que se planteó para su fabricación. Las características que debe tener el instrumento son las siguientes:
Debe medir caudales de hasta 1 litro / segundo.
Debe resultar económico.
Debe ser de fácil mantenimiento.
Los materiales para su construcción deben ser resistentes y de fácil adquisición.
3.2.1 SELECCIÒN DE LA TURBINA
Se seleccionó un motor-turbina de alto flujo que posteriormente será modificado para solo cumplir la función de turbina con la ventaja de que resulta económica y además cuenta con una base que dirige el flujo hacia los álabes de la turbina de tal manera que se adapta perfectamente a las condiciones de trabajo, donde los direccionadores ayudarán al flujo a mover la turbina de una manera proporcional tal y como se puede observar en la Figura 25. Las características por las cuáles se eligió utilizar éste elemento fueron:
Bajo costo.
Material resistente a golpes y vibraciones.