ESC
UNID
ING
INGE
CUELA S
DAD PRO
GENIERIA
Diseño
QUE
ENIERO E
Ci
Dr
M. en C.
SUPERIO
EL
OFESION
A EN COM
o de un el
PARA OB
EN COMU
PR
Jersai
inthya Be
A
r. Alberto
Pedro Gu
OR DE I
LECTRIC
NAL “AD
MUNICAC
lectromióg
TESIS
BTENER
UNICACIO
RESENTA
n Chávez
eatriz San
ASESORE
o Luviano
ustavo Ma
MEX
NGENIE
CA
DOLFO L
CIONES Y
grafo inalá
EL TITUL
ONES Y E
AN:
z López
n Juan Na
Dedicatoria
A mi madre Reyna,
que me acompaño y sintió todos mis desvelos y sufrimientos.
A mi tía Elvira,
el gran pilar detrás de mí que hizo posible este sueño.A mi abuelo Juan, por su apoyo
incondicional todos estos años.A mi tío Juan,
por recordarme todos los días que no existen límites para lograr lo que deseamos.Agradecimientos
Este proyecto se logro terminar y llevar a cabo gracias a la ayuda de diversas personas que merecen un agradecimiento muy especial.
A mi madre Reyna
, por darme las fuerzas y apoyo para lograr el resultado que he obtenido.A mi tía Elvira
, que me dio todas las herramientas para obtener lo que deseaba.A mi abuelo Juan
, por sus enseñanzas para llevar a cabo mis tareas.A mi tío Juan
, mi gran mentor, que con cuatro palabras hizo que me levantara en todos los momentos en los que creía no había forma de seguir adelante.A
mis primos Jhovan, Beto e Itzel, y amigos Jesús, Fili, Randy y
Ángel, dos palabras de seis letras que prefiero convertir en una de ocho, hermanos,
que me apoyaron con sus sabias palabras para derrumbar esos pequeños obstáculos que me impedían avanzar.Finalmente, y no por eso los menos importantes, compañeros y profesores, los cuales, con sus palabras y enseñanzas logre aprender lo necesario o lo que podía.
A todos ustedes, con todo mi amor, respeto y cariño no me queda nada más que decirles, gracias.
Dedicatorias
“Cuando
nuestros
sueños
se
han
cumplido,
es
cuando
comprendemos
la
riqueza
de
nuestra
imaginación
y
la
pobreza
de
la
realidad”.
Dedico y agradezco por su apoyo y confianza en mi trabajo, su capacidad para guiar mis
ideas y mi formación como persona debo agradecerles a cada uno por ser parte en cada una
de mis metas.
A
mis
padres
María
Guadalupe,
Pedro
y
Juan
Luis
por ser el pilar en todo lo que soy, en mi formación académica, asícomo de la vida por su incondicional apoyo a través del tiempo
y manteniendo de pie en cada triunfo o derrota durante todo
este tiempo.
A
mis
hermanos
Blanca,
Miguel,
Norma
y
Adriana
quienes me han apoyado para seguiradelante dándome consejos y estando presentes
cuando más los necesito.
Agradecimientos
A
mis
profesores
quienes fueron los responsables de darme los conocimientos para así poder culminar un proyecto más en mi vida, en especial alDr.
Alberto
Luviano
Juárez
quien fue el responsable para poder realizar este trabajo y quien estuvo al pendiente quenada nos faltará para terminar a tiempo y en orden todo lo propuesto desde un principio.
Profesor
Pedro
Magaña
quien nos llevo de la mano para que todo saliera a la perfección y quien ha estado hasta el final de todo este trabajo.
A
Jersain
Chávez
López
compañero y amigo pero sobre todo cómplice en la realización de este proyecto, quien me enseño que todo se puede bajo cualquier circunstancia, existenpersonas en el transcurso de la vida que entran y salen de ella pero solo se quedan las más
valiosas y él es una de ellas en mi vida.
Y
a
todas
aquellas
personas
que de una u otra forma, colaboraron o participaron en la realización de esta investigación, hago extensivo mi más sincero agradecimiento.
“
ele
i
Dis
ect
na
señ
tro
alám
ño
omi
mb
de
óg
bric
e un
graf
co”
n
O B J E T I V O
ÍNDICE
O B J E T I V O ... VIII
INTRODUCCION ... XIII
ANTECEDENTES ... 2
CAPITULO 1. ELECTROMIOGRAFÍA ... 5
1.1 Electromiografía ... 5
1.2 Registro del EMG ... 5
1.3 Reseña anatómica ... 6
1.4 Reseña electrofisiológica ... 8
1.4.1 Velocidad de conducción nerviosa ... 10
1.4.2 Velocidad de conducción sensorial ... 11
1.5 Electromiógrafo ... 12
1.5.1 Electrodos ... 13
1.5.1.1 Electrodos superficiales ... 14
1.5.1.2 Electrodos intratisulares ... 15
1.5.2 Pre-Amplificadores Electródicos ... 16
1.5.3 Filtros ... 16
1.5.4 Amplificadores ... 16
1.6 Aplicaciones de la electromiografia ... 17
CAPITULO 2. COMUNICACIÓN INALÁMBRICA ... 19
2.1 Antecedentes de las redes y comunicación inalámbrica ... 19
2.2 Redes de sensores ... 20
2.3 Características de redes y comunicación inalámbrica ... 22
2.4 Dispositivos de comunicación inalámbricos ... 24
2.5 Elementos de redes y comunicación inalámbrica ... 25
2.6 Comparación de tecnologías inalámbricas ... 26
CAPITULO 3. ZIGBEE ... 31
3.1 Zigbee (IEEE 802.15.4) ... 31
3.2 Componentes de la red ... 33
3.3.1 Estrella ... 34
3.3.2 Árbol ... 35
3.3.3 Malla ... 36
3.4 Modulación ... 36
3.5 Método de control de acceso al medio ... 37
3.6 Arquitectura ... 39
3.6.1 Nivel físico (PHY) ... 40
3.6.1.1 Cabecera de sincronización ... 41
3.6.1.2 Cabecera física ... 41
3.6.1.3 Unidad de datos de servicio (PSDU) ... 41
3.6.2 Control de acceso al medio (MAC) ... 43
3.6.3 Capa de red (NWK) ... 45
3.6.3.1 Protocolo AODV ... 45
3.6.4 Capa de aplicación (APL) ... 46
3.7 Estructura de supertrama ... 47
3.7.1 Beacon ... 48
3.7.2 Contention Access Period (CAP) ... 49
3.7.3 Contention Free Period (CFP) ... 49
3.8 Modos de operación en ZigBee/IEEE 802.15.4 ... 50
3.8.1 Modo Beacon-habilitado ... 50
3.8.2 Modo Beacon-no habilitado ... 51
3.9 Creación de una red ... 52
3.9.1 Generación de beacon ... 52
3.9.2 Descubrimiento de un dispositivo ... 52
3.9.3 Asociación de un dispositivo ... 53
3.9.4 Disociación de un dispositivo ... 53
3.9.4.1 Coordinador inicia la disociación ... 54
3.9.4.2 Dispositivo inicia la disociación ... 54
3.9.5 Sincronización ... 54
3.9.5.1 Sincronización en una red con modo beacon-habilitado ... 55
3.9.6 Transmisión y recepción de datos ... 55
3.9.6.1 Transmisión de datos ... 55
3.9.6.2 Recepción de datos ... 58
3.10 Aplicaciones de ZigBee ... 58
3.10.1 Hogares automatizados ... 58
3.10.2 Cuidados en la salud ... 59
CAPITULO 4. RESULTADOS EXPERIMENTALES ... 61
4.1 Diseño, construcción y caracterización del electromiógrafo ... 61
4.1.1 Fuente de alimentación ... 61
4.1.2 Electrodos ... 61
4.1.3 Amplificación ... 61
4.1.4 Filtro pasa banda ... 64
4.1.5 Regulación de offset ... 70
4.1.5.1 Sujetador de nivel activo ... 70
4.1.5.2 Recortador de nivel activo ... 72
4.1.5.3 Circuito sujetador y recortador de nivel sin distorsión ... 73
4.2 Conversión y transmisión de datos ... 77
4.2.1 Conversión analógica a digital ... 77
4.2.2 Transmisión a través del módulo EUSART ... 79
CONCLUSIÓN ... 81
ACRONIMOS ... 83
GLOSARIO ... 87
BIBLIOGRAFÍA ... 93
ANEXO A. PIC 18F4520 ... 96
ANEXO B. MÓDULO XBEE ... 105
ANEXO C. COMO CREAR UN PROYECTO EN MPLAB ... 110
INTRODUCCION
La electromedicina se encarga de estudiar y analizar los padecimientos de la salud humana, por lo que diagnostica estos y busca ofrecer nuevas alternativas para el tratamiento de estas enfermedades por medio de la tecnología.
Los profesionales en electromedicina se especializan en solucionar y facilitar cualquier problema relacionado con tecnología electrónica aplicada en la medicina. En otras palabras, consiste en la correcta planificación, aplicación, desarrollo de equipos, técnicas utilizadas en los exámenes y tratamientos médicos, así como el control de calidad de los equipos empleados.
Dentro de estos equipos se encuentran los electromiógrafos y los electrocardiógrafos, que son una herramienta muy importante para facilitar y ayudar el trabajo de personal médico.
El registro de la actividad muscular es muy importante dentro del campo de las aplicaciones clínicas y la biomedicina, ya que permite conocer el estado de salud de los músculos.
Para el registro de esta actividad se hace uso de los electromiógrafos, los cuales son aparatos con tecnología electrónica integrada que permiten la obtención de las señales eléctricas producidas por los músculos que se encuentran en ese momento monitoreados.
ANTECEDENTES
La medicina siempre ha buscado obtener mejoras en las técnicas de medición de los signos vitales.
El ser humano ha utilizado su propio cuerpo como instrumento para la medición de estos signos vitales, como el chequeo del ritmo cardiaco por medio del tacto en las arterias principales del cuerpo humano.
Posteriormente se desarrollaron instrumentos simples tales como: estetoscopio, martillo de reflejos, baumanómetro, que facilitaron la medición realizada de los médicos a sus pacientes.
El desarrollo de la tecnología ha permitido una mejora en los dispositivos de medición, esto ayudo al surgimiento de nuevas ramas de la medicina tales como: electromedicina, bionanotecnología, medicina molecular, entre otras.
La medición de los impulsos que provocan el movimiento muscular se remonta a inicios del siglo XX, utilizando un galvanómetro. Posteriormente los investigadores Gasser y Erlanger utilizaron dispositivos que proporcionaron mayor exactitud en las mediciones, tales dispositivos son los osciloscopios.
Siendo dispositivos diseñados para las mediciones de señales generadas por los músculos, fue indispensable realizar un análisis cuantitativo del potencial eléctrico generado por las fibras musculares.
CAPÍTULO 1
|
CAPITULO 1. ELECTROMIOGRAFÍA
1.1 Electromiografía
La electromiografía (EMG) es el término usado para describir no solamente las señales eléctricas producidas como resultado de la contracción de un músculo, sino también el método de recogida de estas señales y de los datos generados. Este tipo de potencial puede ser voluntario o generado por un electroestimulador nervioso.
Cuando el músculo se mantiene en reposo, su actividad eléctrica es escasa. Sin embargo, durante la actividad muscular se producen señales eléctricas que pueden registrarse. La electromiografía índica si el músculo está activo o inactivo, la duración de la actividad y cuál es el par de torsión generado.
1.2
Registro del EMG
Para que sea posible utilizar los datos obtenidos a partir del músculo, la señal debe ser “limpia”, es decir, libre de ruido, artefactos y distorsión. El ruido puede proceder de varias fuentes, entre ellas:
- Otros músculos, especialmente el corazón.
- Dispositivos eléctricos cercanos, incluyendo el propio equipo de registro del EMG.
- Ondas de radio, por ejemplo, los equipos de radio de ambulancias, policía, etc.
Los artefactos son “señales falsas” generadas o causadas por el dispositivo EMG o por sus cables. Es difícil diferenciar algunas de estas señales de las señales verdaderas que producen del músculo; sin embargo, otros artefactos si se pueden diferenciar fácilmente. En esta última categoría están los artefactos inducidos por el movimiento que tienen lugar cuando se mueven o rozan los electrodos o los cables. Los artefactos inducidos por el movimiento se suelen situar en los extremos superior e inferior del rango de frecuencia, por lo que se pueden filtrar.
La distorsión de las señales del EMG, se debe generalmente al hecho de que, para su uso, las señales deben amplificarse. Puede aparecer distorsión en las situaciones en las que se amplifica la señal de una forma no lineal, en todo el rango del sistema. Es importante que las señales de mayor intensidad se amplifiquen en la misma medida que las señales pequeñas.
1.3 Reseña
anatómica
Los nervios pueden estar constituidos por axones los cuales pueden tener células nerviosas de distintas clases, estás son: motoras, sensitivas y vegetativas. Las extremidades contienen “nervios mixtos”, es decir, una mezcla de las mencionadas anteriormente. Los músculos voluntarios están formados por miles de células musculares (también llamadas fibras musculares), presentan un aspecto voluntario debido a la disposición de sus miofibrillas proteicas contráctiles.
Una unidad motora comprende entre 2 y más de 2,000 células musculares; en cuanto más preciso es el movimiento al que se está destinado el músculo, menor cantidad de fibras musculares contienen sus unidades motoras. Así, las unidades motoras de los músculos laríngeos humanos contienen dos o tres fibras musculares y, en cambio, las del cuadríceps unas dos mil.
[image:20.612.201.452.335.648.2]Las fibras musculares componentes de la unidad motora no forman una masa compacta sino que se entremezclan con las de otra u otras unidades.
Las fibras nerviosas se relacionan con el musculo a través de la “placa motora” (figura 1.2); ésta consta de: a) la “vesícula sináptica” que es la terminación de la neurofibrilla de un axón; b) el “espacio sináptico”; y c) la placa receptora.
Figura 1.2 Placa motora.
1.4 Reseña
electrofisiológica
El impulso eléctrico “potencial de acción” u “onda de despolarización” que viaja por el axón hacia las vesículas sinápticas de sus neurofibrillas se mantiene constante en términos de función transmembrana (unos 80 mV). Este potencial es siempre igual, independientemente que se genere por actividad voluntaria o por un estímulo eléctrico externo. Dura unos pocos milisegundos y puede repetirse hasta un máximo de 50 veces por segundo para cada axón en condiciones fisiológicas normales.
Esta secuencia de acontecimientos se produce para cada conjunto neurofibrilla-fibra muscular, pero debemos tener en cuenta que el o los impulsos que viajan por cada axón afectan a todas las células musculares que forman la unidad motora.
Figura 1.3. Relación entre el potencial de transmembrana de una fibra muscular y la fuerza desarrollada.
El tipo de electrodo utilizado para captar este suceso como la ubicación de los mismos sobre los tejidos contribuye a modificar el tiempo de desarrollo del suceso.
El potencial “pico” promedio obtenido con cualquier tipo de electrodo es de 500µV. Con electrodos finos implantables se pueden registrar picos de hasta 10 mV. El rango de amplitudes captadas varía normalmente entre 20 y 3,500 µV.
1.4.1 Velocidad de conducción nerviosa
La determinación de la velocidad de conducción de una clase de axones que componen un nervio se realiza a fin de juzgar acerca de su estado e integridad y, a veces, permite también juzgar el estado o integridad del nervio todo. Se aprovecha este método para diagnosticar patologías que afectan la función motora.
El método para hallar la velocidad de conducción de la porción motora de un nervio consiste en estimular éste en un punto y registrar con electrodos de superficie el tiempo que tarda el impulso.
Figura 1.4 Medicion de la velocidad de conduccion del nervio cubital.
1.4.2 Velocidad de conducción sensorial
Esta determinacion se realiza estimulando una terminacion sensitiva y registrando luego en uno o más sitios sobre el nervio correspondiente los potenciales de accion que viaja hasta la médula (figura 1.5).
Figura 1.5 Velocidad de conduccion sensorial.
1.5 Electromiógrafo
El elctromiógrafo es un osciloscopio de tecnología avanzada que detecta los potenciales generados por las células musculares. La figura 1.6 ofrece un diagrama en bloques de un electromiógrafo útil tanto para estudios clínicos como para kinesiológicos (estudio de los movimientos normales del cuerpo humano) e investigaciones.
1.5.1 Electrodos
Cuando se trabaja con circuitos eléctricos y se necesita medir la diferencia de potencial entre dos puntos entre dos puntos de los mismos, el procedimiento habitual es colocar las puntas de prueba entre los puntos a medir. Cuando se trata de efectuar mediciones de parámetros electrofisiólogicos, esta técnica tan simple no puede ser empleada.
Para la realización de este tipo de mediciones, se debe tener en cuenta que los puntos sobre los cuales debemos efectuar las mediciones ya no son condutores metálicos sino que se trata de tejidos vivos, los cuales presentan la característica de ser conductores iónicos.
Al querer efectuar una medición de esos potenciales se debe recurrir al auxilio de instrumentos electrónicos, por lo que se presenta la necesidad de tomar los potenciales tisulares a fin de que puedan ser detectados por el instrumento.
El dispositivo que se usa para recoger tales potenciales es conocido con el nombre de electrodo, que puede tener diversas formas y tamaños.
Existen dos clases de electrodos usados en la electromiografía: superficiales e intratisulares.
1.5.1.1 Electrodos superficiales
a) Capacitivos: Consiste en una placa metalica recubierta por una delgadisima capa de material aislante de elevada constante dieléctrica. La piel debajo del electrodo constituye la otra placa del condensador.
b) Electrodos de contacto directo: Son los más comunte utilizados en ECG, VCG (vectoricardiografía), EEG, EOG (electroosculografía), ERG (electrorretinografía) y GSR (Galvic Skin Response, respuesta galvánica de la piel). Son usados en menor medida en EMG (electromiografía). Existen las siguientes variedades: planos, de succion, multipuntuales, susupendidos, miniatura, radiotransparentes, de interfase anhidra e intracavitarios.
b.1) Electrodos planos: Son los más requeridos. Pueden ser rectangulares, cuadrados o circulares. Su superficie varía entre 20 cm2 para ECG y 5 mm2 para EEG.
b.2) Electrodos de succión: Tienen forma de campana cuya cúspide se comunica con una pera de goma para ejercer la succión. Se usan especialmente sobre tejidos de superficie curva, o cuando se necesita rapidez en la colocacion y extracción o cuando hay dificultad para sujetar uno plano.
dientes queden en contacto con los estratos profundos de la epidermis. Son electrodos de rápida aplicación que no requieren pasta de acople.
b.4) Electrodos suspendidos: Son electrodos que no contactan directamente con los tejidos sino que se hallan sumergidos en un electrolito que es el intermediario entre ellos y el tejido.
b.5) Electrodos radiotransparentes: Se requieren en los casos en que el paciente debe ser monitoriado continuamente y además radiografiarlo en la zona donde permanecen los electrodos.
b.6) Electrodos intracavitarios: Son electrodos que se colocan en cavidades naturales del organismo. Los mas conocidos son los inatracardíacos para la investigación de lesiones del sistema de conducción eléctrica del corazón. Los hay para registrar señales de zonas ocultas del cerebro en EEG, del corazón en ECG, del útero en electrohisterografía.
b.7) Electrodos especiales: En aeronáutica, astronáutica y experimentacion de laboratorio es necesario dejar los electrodos implantados durante días, meses y aún años y tener la seguridad que no dejen de contactar adecuadamente, ni sean toxicos. Se utilizan entonces los llamados electrodos percutáneos o subepidérmicos, ya que una porción de los mismos se introduce debajo de la epidermis sobresaliendo al exterior sólo los terminales de conexión.
1.5.1.2 Electrodos intratisulares
Tambien llamados subintegumentales, son aquéllos que se clavan profundamente en los téjidos.
durante algunas operaciones neurológicas (cerebrales); existen dos tipos de electrodos intratisulares: intracerebrales subcorticarles y electrodos de aguja de usos diversos pero sobre todo en EMG.
1.5.2 Pre-Amplificadores Electródicos
Estos ayudan a eliminar las interferencias captadas por los cables de entrada, así como las debidas a los movimientos efectuados por el sujeto, se utilizan unos pequeños pre-amplificadores electródicos que se fijan junto a los electrodos.
1.5.3 Filtros
Se filtran las señales con un filtro pasa-altas, con una frecuencia de corte de 5-20 Hz para desestimar artefactos de baja frecuencia producidos por los tejidos, ademas de eliminar el ruido que nos ocasionen los electrodos (movimiento principalmente). Para eliminar las altas frecuencias se utiliza un filtro pasa-bajas, con una frecuencia de corte por debajo de 500-1,000 Hz).
1.5.4 Amplificadores
la computadora, y una vez obtenida la señal en la computadora mide su amplitud y el tipo de onda que se obtuvo, con el resultado de la estimulación.
1.6
Aplicaciones de la electromiografia
Tiene aplicaciones básica como lo son: a) estudios kinesiológicos; b) diagnósticos; c) investigación clínica; d) investigación básica zoológica.
Estos estudios se realizan introduciendo lentamente la aguja en el muscúlo, la cual llega a estimular mecánicamente un nervio o unas fibras musculares y se generan potenciales eléctricos correspondientes a una o más unidades motoras. Las unidades motoras tienen una duración de 2 a 10 ms, siendo su amplitud de estas entre 50 y 3,500 µV.
CAPÍTULO 2
|
CAPITULO 2. COMUNICACIÓN INALÁMBRICA
2.1 Antecedentes de las redes y comunicación inalámbrica
Las primeras redes construidas permitieron la comunicación entre una computadora central y terminales remotas. Se utilizaron líneas telefónicas, ya que estas permitían un traslado rápido y económico de los datos. Se utilizaron procedimientos y protocolos ya existentes para establecer la comunicación y se incorporaron moduladores y demoduladores para que, una vez establecido el canal físico, fuera posible transformar las señales digitales en analógicas adecuadas para la transmisión por medio de un módem.
Tiempo después, se introdujeron equipos de respuesta automática que hicieron posible el uso de redes telefónicas públicas conmutadas para realizar las conexiones entre las terminales y la computadora.
A principios de los años 70 surgieron las primeras redes de transmisión de datos destinadas exclusivamente a este propósito, como respuesta al aumento de la demanda del acceso a redes a través de terminales para poder satisfacer las necesidades de funcionalidad, flexibilidad y economía. Se analizaron las ventajas de permitir la comunicación entre computadoras y entre grupos de terminales, ya que dependiendo del grado de similitud entre computadoras es posible permitir que compartan recursos en mayor o menor grado.
Se puede definir una red inalámbrica como aquel sistema con la capacidad de conectar equipos terminales a la red de datos sin necesidad de utilizar cables de comunicación para ello.
2.2 Redes de sensores
Un sensor es un dispositivo que produce una señal en respuesta a su detección o medida de una propiedad, como posición, fuerza, torque, presión, temperatura, velocidad, etc.
Estas redes están formadas por un grupo de sensores con ciertas capacidades sensitivas y de comunicación, es decir, dotados de inteligencia propia, que les permite formar redes inalámbricas sin infraestructura física preestablecida ni administración central e interconectarse de forma inalámbrica con otros dispositivos semejantes. Estos permiten monitorear cierta actividad, siendo capaces de almacenar y comunicar datos en una red de forma inalámbrica. Las redes de sensores son un concepto relativamente nuevo en adquisición y tratamiento de datos con múltiples aplicaciones en distintos campos tales como entornos industriales, domótica, entornos militares, detección ambiental y medicina (véase la figura 2.1).
Figura 2.1 Aplicaciones potenciales de las redes de sensores.
Dentro del campo de las redes móviles ad hoc, las redes de sensores son las que parecen tener un futuro más prometedor.
Una red móvil ad-hoc (MANET, Mobile Ad-hoc Network) es una colección de nodos móviles autónomos que se comunican entre sí mediante enlaces inalámbricos, dónde no existe una infraestructura de red fija y la administración se realiza de forma descentralizada. En este nuevo entorno, los nodos participan en la toma de decisiones, realizando las funciones propias del mantenimiento de la red y tomando parte en los algoritmos de encaminamiento.
Además de los usos vistos en la figura 2.1 podemos encontrar los siguientes:
- Sensores ambientales: El control ambiental de vastas áreas de bosque o de océano, sería imposible sin las redes de sensores. El control de múltiples variables, como temperatura, humedad, fuego, actividad sísmica así como otras. También ayudan a expertos a diagnosticar o prevenir un problema o urgencia y además minimizar el impacto ambiental del presencia humana. - Sensores industriales: Dentro de fábricas existen complejos sistemas de
control de calidad, el tamaño reducido de estos sensores les permite estar allí donde se requiera.
- Automoción: Las redes de sensores son el complemento ideal a las cámaras de tráfico, ya que pueden informar de la situación del tráfico en ángulos muertos que no cubren las cámaras y también pueden informar a conductores de la situación, en caso de una avería o accidente, con lo que estos tienen capacidad de reacción para tomar rutas alternativas.
- Medicina: Es otro campo bastante prometedor. Con la reducción de tamaño que están sufriendo los nodos sensores, la calidad de vida de pacientes que tengan que tener controlada sus constantes vitales (pulsaciones, presión, nivel de azúcar en sangre, etc.), podrá mejorar sustancialmente. En estos entornos, las posibles aplicaciones están limitadas por la compatibilidad electromagnética con el material hospitalario.
- Domótica: Su tamaño, economía y velocidad de despliegue, la hacen una tecnología ideal para que esta funcione “por si sola” en el hogar.
2.3 Características de redes y comunicación inalámbrica
Los datos que se desean transmitir se añaden sobre la portadora de forma tal que en el lado receptor puedan ser precisamente recuperados, este proceso es conocido como "modulación de la portadora", por la información que se desea transmitir. Una vez que la portadora ha sido modulada, la señal de radio ocupa más de una frecuencia, ya que la frecuencia de la información moduladora se añade a la portadora.
En la configuración típica de una WLAN, un dispositivo transmisor/receptor (denominado punto de acceso) se conecta a la red alambrada desde un punto fijo utilizando un cable Ethernet estándar.
La distancia sobre la cual los dispositivos de radio frecuencia se pueden comunicar depende del diseño de los productos, las interacciones con los objetos típicos de construcción, y aún las personas pueden afectar la forma de propagación de las ondas.
El punto de acceso o la antena asociada al punto de acceso usualmente se monta en un punto alto, sin embargo, puede colocarse en cualquier lugar práctico, siempre y cuando se obtenga la cobertura deseada.
Los usuarios finales acceden la WLAN a través de adaptadores inalámbricos, implementados en tarjetas PC para computadoras portátiles (Laptops), adaptadores ISA o PCI para computadoras de escritorio (Desktops) o mediante adaptadores totalmente integrados en asistentes personales digitales (PDA, por las siglas de
Personal Digital Assistant). Los adaptadores WLAN proporcionan la interfaz entre el
2.4 Dispositivos de comunicación inalámbricos
Los componentes inalámbricos se utilizan para la conexión a redes en distancias que hacen que el uso de adaptadores de red y opciones de cableado estándares sea técnica o económicamente imposible. Las redes inalámbricas están formadas por componentes inalámbricos que se comunican con las LAN’s.
Excepto por el hecho de que no es un cable el que conecta los equipos, una red inalámbrica típica funciona casi igual que una red con cables: se instala en cada equipo un adaptador de red inalámbrico con un transceiver (dispositivo que transmite y recibe señales analógicas y digitales). Los usuarios se comunican con la red igual que si estuvieran utilizando un equipo con cables.
Salvo por la tecnología que utiliza, una red inalámbrica típica funciona casi igual que una red de cables: se instala en cada equipo un adaptador de red inalámbrico con un transceptor, y los usuarios se comunican con la red como si estuvieran utilizando un equipo con cables.
Existen dos técnicas habituales para la transmisión inalámbrica en una LAN: la transmisión por infrarrojos y la transmisión de radio en banda estrecha.
- Transmisión por infrarrojos: Funciona utilizando un haz de luz infrarroja que transporta los datos entre dispositivos. Debe existir visibilidad directa entre los dispositivos que transmiten y los que reciben; si hay algo que bloquee la señal infrarroja, puede impedir la comunicación. Estos sistemas deben generar señales muy potentes, ya que las señales de transmisión débiles son susceptibles de recibir interferencias de fuentes de luz, como ventanas.
transmisión vía radio en banda estrecha está sujeta a interferencias de paredes de acero e influencias de carga. La radio en banda estrecha utiliza un servicio de suscripción. Los usuarios pagan una cuota por la transmisión de radio.
2.5 Elementos de redes y comunicación inalámbrica
- Sistema de implantación: Solución de sencilla implantación y que requiere poca carga de instalación.
- Reducción de costos de mantenimiento: La sencillez de la solución y la robustez de los equipos (equipos fiables), repercuten en una reducción en los costos de mantenimiento, esta reducción se concluye dado que las redes cableadas sufren de deterioros.
- Retorno de la inversión: en tiempo y dinero: En soluciones de unión de sedes, edificios, etc., el retorno de la inversión es prácticamente inmediato, pues el ahorro del costo de tiradas de fibras o pagos mensuales de líneas alquiladas es enorme.
- Costos de implantación reducidos: Se puede ahorrar la instalación de cableado.
También surgen problemas cuando las distintas conexiones empiezan a ser robadas. Por ser una conexión inalámbrica cualquiera puede robar la frecuencia para la conexión.
servicio a una determinada distancia. Aunque el problema se puede solucionar encriptando el tráfico o con el manejo de claves de acceso, esto perdería el objetivo de poder acceder con libertad.
2.6 Comparación de tecnologías inalámbricas
Existe diversidad de tecnologías inalámbricas, cada una con características particulares que las hacen más adecuadas a un entorno adecuado para cada una.
Denominación Anchura de banda
Banda estrecha De 10 a 100 Kbps. Banda media De 100 a 2,000 Kbps. Banda ancha De 2 a 100 Mbps. (o más)
Tabla 2.1 Tipos de tecnologías inalámbricas según su anchura
Si las tomamos en el punto de comparación de la velocidad, encontramos tecnologías de banda ancha y banda estrecha en función de la información que sea capaz de manejar. Estos tipos de tecnologías quedan recogidos en la tabla 2.1, en donde se incluye una banda media, en la que se engloban aquellas tecnologías con características hibridas entre las dos categorías anteriores.
Figura 2.2 Velocidad de las tecnologías inalámbricas.
Figura 2.3 Consumo de potencia de las tecnologías inalámbricas
Como norma general, cuanto mayor sea la frecuencia de trabajo, menor será la distancia máxima que la tecnología en cuestión es capaz de cubrir, ya que la señal es más sensible a los obstáculos que encuentra en su camino.
Una de las ventajas de las comunicaciones inalámbricas, independientemente de la tecnología, es su bajo costo de infraestructura en comparación con los tradicionales sistemas de comunicación basados en cableado, esto se puede verificar con el caso más frecuente que es la mudanza, dado que la red cableada se queda físicamente en el antiguo lugar; mientras que la red inalámbrica se desmonta y se vuelve a instalar de nuevo en el lugar deseado. Sin embargo existen tecnologías más baratas que otras, como lo muestra la figura 2.5.
CAPITULO 3. ZIGBEE
El electromiógrafo inalámbrico que se ha diseñado se encuentra implementado bajo el protocolo de ZigBee, la principal razón es por el bajo costo y consumo de potencia de este. Además que el dispositivo Xbee tiene la ventaja de ser programado con gran facilidad y de permitir una sencilla conexión para implementarlo en alguna aplicación deseada, aunque una gran desventaja es su baja velocidad de datos (250 kbps).
3.1
Zigbee (IEEE 802.15.4)
El estándar IEEE 802.15.4, más conocido como ZigBee, es una especificación para aplicaciones de control remoto de dispositivos, juguetes y, en general, cualquier equipo que requiere de un bajo costo y un bajo consumo de potencia en entornos reducidos como el hogar.
ZigBee es promovida por la ZigBee Alliance (figura 3.1), la cual, es una comunidad internacional de más de 100 compañías como Motorola, Mitsubishi, Philips, Samsung, Honeywell, Siemens, entre otras; cuyo objetivo es habilitar redes inalámbricas con capacidades, como ya se mencionó anteriormente, de control y monitoreo que sean confiables, de bajo consumo energético y de bajo costo.
Las abejas melíferas viven en colonias formadas por una reina, unos pocos zánganos y miles de obreras. La supervivencia, éxito, y futuro de la colonia dependen de la comunicación continua entre cada miembro.
La técnica que las abejas utilizan para comunicar una nueva fuente de alimento usa un sistema silencioso pero poderoso de comunicación. La abeja baila en un modelo de zig-zag, compartiendo así la información de situación, distancia, y dirección del alimento recientemente descubierto con sus compañeras.
Al ver que este estándar guarda similitud con una colonia de abejas se decidió bautizar a esta tecnología como ZigBee, “Zig” por la manera que usan las abejas para comunicarse entre sí y “Bee”por abeja.
ZigBee puede trabajar a tres bandas de frecuencia diferentes: 868 MHz, 915 MHz y 2.4 GHz. Las características generales de ZigBee están recogidas en la tabla 3.1:
Velocidad de transmisión 250 Kbps ( 2.4 GHz), 40 Kbps (915 MHz) y 20 Kbps (868 MHz)
Acceso al medio CSMA-CA
Topologías Estrella, punto a punto, mallada, árbol Espacio de direcciones 64 bits
Alcance Entre 5 y 500 m, dependiendo del
entorno
El máximo número de elementos que se puede tener es de 65535
( )
162 módulos.
Esto se debe a que los algoritmos de ruteo de la red de ZigBee utiliza direcciones de 16 bits. Los dispositivos son preprogramados para su función de red.
3.2
Componentes de la red
ZigBee diferencia entre dispositivos completamente funcionales (FFD, Full Function
Device) y dispositivos parcialmente funcionales (RFD, Reduced Function Device).
Las características de uno y otro se aprecian en la tabla 3.2.
FFD Funcionamiento en cualquier topología
Puede ser el coordinador de la red
Capacidad para comunicarse con cualquier otro dispositivo
RFD No puede ser el coordinador de la red
Sólo se puede comunicar con el coordinador de la red
Implementación sencilla
Tabla 3.2. Características de los dispositivos de Zigbee
Otra clasificación de los dispositivos se puede realizar en base a su papel dentro de la red:
• Coordinador: Se encarga de inicializar una red, envía los paquetes para sincronización (beacons) y puede servir de enlace con otras redes.
• Router: Sirve como repetidor, ya que se encarga del enrutamiento de mensajes que requieren saltos múltiples.
• Dispositivo final: Son los dispositivos más básicos de la red, son los sensores o actuadores de la red y solo se pueden comunicar con un coordinador o router.
3.3 Topología
La arquitectura de red en ZigBee define tres topologías de red: estrella, árbol y malla.
3.3.1 Estrella
Figura 3.2 Topología estrella.
3.3.2 Árbol
En esta topología de red, también conocida como cluster tree, se tiene la asociación de varias redes (figura 3.3) en donde el coordinador PAN:
• Forma el primer cluster y se establece a sí mismo como Cluster Head (CH) con su respectivo Cluster Identifier (CID) igual a cero.
• Elije un identificador PAN.
• Envía tramas beacons a todos los dispositivos vecinos.
Las redes que deseen asociarse al cluster 0 pueden hacerlo a través de cualquier dispositivo de su red. Además, los coordinadores deben establecerse como Cluster
Head y tomar su respectivo CID.
3.3.3 Malla
En la topología de malla puede existir también un coordinador PAN. La diferencia es que en este tipo de topología, los módulos pueden establecer la comunicación con cualquier otro que se encuentre dentro de su rango de alcance. En esta topología los datos pueden seguir caminos diferentes para llegar a su destino.
Figura 3.4 Topología malla
3.4 Modulación
3.5
Método de control de acceso al medio
Tanto el radio como el infrarrojo operan en un medio de difusión, es decir, todas las transmisiones son recibidas por todos los receptores que están dentro del campo de cobertura del transmisor. En consecuencia, así como necesitamos recurrir a un método de MAC con las LAN por cable con medio compartido para asegurarnos de que sea un solo transmisor el que está usando el medio, también necesita un método de MAC con las LAN inalámbricas. Los esquemas que más se usan para ello son CDMA, CSMA/CD, CSMA/CA, TDMA y FDMA.
ZigBee utiliza CSMA/CA (CSMA con evasión de colisiones, CSMA with collision aviodance). Su principio de funcionamiento se ilustra en la figura 3.5.
Como puede verse, en lugar de iniciar la transmisión de una trama inmediata después de que el medio queda inactivo, el nodo espera un lapso aleatorio adicional corto, y sólo si el medio sigue inactivo después de este intervalo comienza a transmitir. De esta manera, si hay otros nodos en espera, el nodo que calcula el tiempo más corto obtendrá acceso primero y los nodos restantes cederán ante él. Una vez más, la eficiencia del esquema es una función del número de incrementos de tiempo –y por tanto de bits en la secuencia pseudoaleatoria- que tiene el período de evitación de colisiones máximo.
Figura 3.6 MAC inalámbrico: procedimiento de cuatro vías del protocolo DFW MAC.
métodos de MAC, se le ha denominado protocolo de MAC inalámbrico de fundamento distribuido (DFW MAC, distributed foundation wireless MAC). El procedimiento de saludo de cuatro vías utilizado en la figura 3.6, y está diseñado para aplicaciones tanto de infraestructura como ad hoc.
3.6 Arquitectura
ZigBee es una pila de protocolos, que de manera similar al modelo OSI está constituido por diferentes capas, las cuales son independientes una de la otra. En la figura 3.6 se muestran las diferentes capas que conforman la pila de protocolos para ZigBee.
Cada capa se comunica con sus capas subyacentes a través de una interfaz de datos y otra de control, las capas superiores solicitan servicios a las capas inferiores, y éstas reportan sus resultados a las superiores.
3.6.1 Nivel físico (PHY)
Provee el servicio de transmisión de datos sobre el medio físico propiamente dicho, así como la interfaz con la entidad de gestión del nivel físico, por medio de la cual se puede acceder a todos los servicios de gestión del nivel y que mantiene una base de datos con información de redes de área personal relacionadas. De esta forma, PHY controla el transceiver de radiofrecuencia y realiza la selección de canales junto con el control de consumo y de la señal.
La estructura de la trama de capa física es como se muestra a continuación:
3.6.1.1 Cabecera de sincronización
Este campo es usado la para la sincronización de la trama. Esta cabecera consta de dos campos, un preámbulo (Preamble) y un delimitador de inicio de trama (
start-of-frame delimiter). El preámbulo contiene 32 bits y permite a los nodos receptores
lograr la sincronización de bits del paquete. El delimitador de inicio de trama contiene 8 bits y permite al receptor identificar el inicio de los bits de datos del paquete.
3.6.1.2 Cabecera física
Especifica el largo de la PSDU.
3.6.1.3 Unidad de datos de servicio (PSDU)
En el campo de datos de la capa física se encapsula a la trama MAC cuyo valor máximo debe ser de 127 bytes. Así que el paquete máximo de capa física será de 133 bytes. Con lo que las duraciones máximas de los paquetes son de:
• 4.25 ms para 2.4 GHz • 26.6 ms para 915 MHz • 53.2 ms para 868 MHz
Este nivel opera en una de tres posibles bandas de frecuencia de uso no regulado:
- 902-928 MHz: Norte de América, hasta diez canales (2003) extendidos a treinta (2006)
- 2400-2483.5 MHz: Uso en todo el mundo, hasta dieciséis canales (2003, 2006)
Figura 3.8 Estructura de canales de IEEE 802.15.4 (2003).
La versión original del estándar, de 2003, especifica dos niveles físicos basados en espectro ensanchado por secuencia directa (direct sequence spread spectrum, DSSS): uno en las bandas de 868/915 MHz con tasas de 20 y 40 kbps; y otra en la banda de 2450 MHz con hasta 250 kbps.
usan modulación en fase binaria o por cuadratura en offset (offset quadrature phase
shift keying, ésta segunda opcional). En la banda de 2450 MHz se usa esta segunda
técnica
3.6.2 Control de acceso al medio (MAC)
El formato general de las tramas MAC se diseñó para ser muy flexible y que se ajustara a las necesidades de las diferentes aplicaciones con diversas topologías de red al mismo tiempo que se mantenía un protocolo simple. El formato general de una trama MAC se muestra en la figura 3.9.
Figura 3.9 Forma general de la trama MAC.
pie de MAC (MFR). El primer campo del encabezado de trama es el campo de control. Este indica el tipo de trama MAC que se pretende trasmitir, especifica el formato y la dirección de campo y controla los mensajes de enterado. En pocas palabras, la trama de control especifica como es el resto de la trama de datos y que es lo que contiene.
El tamaño de las direcciones puede variar entre 0 y 20 bytes. Por ejemplo, una trama de datos puede contener información de la fuente y del destinatario, mientras que la trama de enterado no contiene ninguna información de ninguna dirección. Por otro lado una trama de guía solo tiene información de la dirección de la fuente. Esta flexibilidad en la estructura ayuda a incrementar la eficiencia del protocolo al mantener los paquetes lo más reducido que se puede.
El campo llamado payload es variable en longitud; sin embargo, la trama completa de MAC no debe de exceder los 127 bytes de información. Los datos que lleva el
payload dependen del tipo de trama. El estándar IEEE 802.15.4 tiene cuatro
diferentes tipos de tramas. Esas son la trama de guía, de datos, tramas de enterados y tramas de comandos MAC. Solo las tramas de datos y de guía las que contienen información provenientes de capas superiores; las tramas de mensajes de enterado y la de comandos MAC originados en el MAC son usados para comunicaciones MAC peer-to-peer.
3.6.3 Capa de red (NWK)
Tiene como objetivo principal permitir el correcto uso de la capa MAC y ofrecer una interfaz adecuada para su uso por parte de la capa de aplicación. En esta capa se brindan los métodos necesarios para: iniciar la red, unirse a la red, enrutar paquetes dirigidos a otros nodos en la red, proporcionar los medios para garantizar la entrega del paquete al destinatario final, filtrar paquetes recibidos, cifrarlos y autentificarlos. Se debe tener en cuenta que el algoritmo de enrutamiento que se usa es el de enrutamiento de malla, el cual se basa en el protocolo AODV. Cuando esta capa se encuentra cumpliendo la función de unir o separar dispositivos a través del controlador de red, implementa seguridad, y encamina tramas a sus respectivos destinos; además, la capa de red del controlador de red es responsable de crear una nueva red y asignar direcciones a los dispositivos de la misma. Es en esta capa en donde se implementan las distintas topologías de red que ZigBee soporta (árbol, estrella y malla).
3.6.3.1 Protocolo AODV
En sistemas móviles la movilidad implica que la topología de red cambia constantemente, e incluso el mantener una tabla de ruteo resulta algo efímero. Para estos sistemas se creó el protocolo AODV (Ad hoc On-demand Distance Vector), que realiza las actividades de un vector de distancia pero en el momento que lo necesita.
contiene el costo estimado del camino a todas las redes de la configuración. Más aún, cuando se produce un cambio significativo en el coste de un enlace, o cuando un enlace no está disponible, la propagación de esta información a través de la red puede tomar una considerable cantidad de tiempo.
En AODV, cada nodo identifica a sus vecinos, es decir, aquellos con los que tiene contacto directo, mediante mensajes directos denominados HELLO; que no difieren mucho del saludo entre vecinos de una red. Cuando una persona nueva en la red necesita enviar un mensaje a otra que no es un vecino, debe preguntarle a alguno de estos como llegar a su destino. En AODV, la pregunta se denomina Route Request (RREQ). Como buenos vecinos, aquellos que no saben cómo resolverle el problema a este pobre nodo, deciden retransmitir el mensaje a sus respectivos vecinos. Afortunadamente, dado que la forma de comunicación es más parecida gritar por encima de la pared que tocar el timbre, se llama broadcast, cada vecino tiene cuidado de no retransmitir retransmisiones gracias a la existencia de un numero de secuencia, que identifica el pedido. Así, dicho pedido viaja a través de la red y llega a alguien que si sabe cómo llegar, quien devuelve la información en forma de una respuesta llamada Route Reply (RREP) quien viaja a su vez hasta llegar al interesado, no sin antes informar a todos los demás en el camino. Finalmente, si un vecino desaparece, el nodo que lo detecta informa a los demás mediante un mensaje
Route Error (RERR), de modo que estos puedan eliminarlo de su tabla de ruteo.
3.6.4 Capa de aplicación (APL)
La función de la subcapa ZDO es definir el rol del dispositivo dentro de la red (ya sea de coordinador o de dispositivo final), iniciando o respondiendo a las peticiones y estableciendo una conexión segura entre los dispositivos de la red.
Las funciones de la subcapa APS incluyen: establecer la comunicación entre dos o más dispositivos según sus servicios y necesidades; y enviar mensajes entre ellos. El APSDE provee el servicio de transmisión de datos entre dos o más dispositivos localizados en la misma red. El APSME provee servicios de descubrimiento y unión de dispositivos y mantiene una base de datos del manejo de objetos, conocido como el APS information base (AIB).
3.7
Estructura de supertrama
La supertrama está limitada por dos tramas beacon y tiene un período activo y uno inactivo como muestra la Figura 3.10.
La parte activa de la supertrama está compuesta por tres partes como muestra la figura 3.11:
Figura 3.11 Partes del periodo activo de una supertrama.
- Beacons
- Periodo de acceso por contención (Contention Access Period (CAP)) - Periodo libre de contención (Contention Free Period (CFP))
3.7.1 Beacon
La trama beacon es transmitida sin necesidad de CSMA y ocupa el slot 0. Cuando se
usa beacons (señales enviadas por el coordinador de la red para la sincronización de
3.7.2 Contention Access Period (CAP)
El CAP comienza inmediatamente después de la trama beacon y termina antes del inicio del CFP (si éste existe). Todas las transmisiones durante el CAP son hechas usando el mecanismo de acceso al canal denominado CSMA/CA ranurado. Sin embargo, las tramas ACK y los datos que siguen a una trama ACK de una petición de datos son transmitidos sin contención. Un dispositivo que no puede completar su transmisión y ya se ha llegado al final del CAP, debe postergar su transmisión hasta el CAP de la próxima supertrama.
3.7.3 Contention Free Period (CFP)
El CFP consiste en Guaranteed Time Slots (GTS’s) que son asignados por el coordinador PAN para aplicaciones que requieren baja latencia, un ancho de banda específico y QoS (Quality of Service).
El coordinador PAN puede asignar hasta un máximo de 7 GTS’s y cada GTS solo puede ocupar un solo slot. Los GTS’s solo son usados para comunicaciones entre el coordinador PAN y un dispositivo.
3.8
Modos de operación en ZigBee/IEEE 802.15.4
3.8.1 Modo Beacon-habilitado
Cuando el coordinador PAN selecciona el modo de beacon-habilitado, usa la estructura de supertrama para manejar la comunicación entre dispositivos. El formato de la supertrama está definido por el coordinador PAN, y dicho formato se lo envía periódicamente dentro de una trama beacon al resto de dispositivos.
El mecanismo de utilización de beacons, consiste en que un determinado nodo, mandará unas tramas (balizas) de manera periódica, marcando una serie de divisiones de tiempo entre dos beacons, los slots. En concreto, se establecen 16 slots. Los nodos que quieran transmitir lo hacen en uno de estos slots. La señal, indica a un nodo que puede transmitir, si no tiene nada para trasmitir se apaga. En el caso de transmitir, espera un periodo de contención aleatorio, de varios slots. Tras ese periodo, si el canal está libre, el nodo retransmitirá alineado con el siguiente slot de tiempo. La sincronización permite que varios nodos puedan transmitir al mismo tiempo, reduciendo las colisiones, intentos de retransmisión, etc.
El dispositivo coordinador se encarga de transmitir beacons cada cierto tiempo, entre
beacon y beacon se establece una supertrama compuesta de 16 slots, también
llamados slots de backoff. Al periodo que ocupan los 15 slots libres que hay entre
beacons se les llama CAP (Contention Access Period), en ellos los dispositivos
pueden transmitir de forma coordinada.
Si el canal está ocupado, dejara pasar otro número aleatorio de ranuras de backoff. Los únicos paquetes que no están sometidos a CSMA-CA son los ACK’s y los beacons.
Figura 3.12 Supertrama con mensaje seguido de un periodo CSMA
3.8.2 Modo Beacon-no habilitado
Aquí, el mecanismo de acceso al medio es CSMA-CA no ranurado, esto implica que los dispositivos transmiten en el momento que es necesario sin esperar ningún
beacon de ningún dispositivo coordinador. Su mecanismo de funcionamiento es el
3.9
Creación de una red
Una PAN puede ser creada solamente por un dispositivo FFD después de realizado un sondeo de canal, procedimiento en el cual el dispositivo ha elegido un canal y un identificador PAN.
Una vez creada la PAN, el coordinador genera y envía tramas beacon para manejar la asociación y disociación de otros dispositivos proveyendo servicios de sincronización permitiendo la asignación y el manejo de GTS’s.
3.9.1 Generación de beacon
A un FFD le está permitido generar y enviar tramas beacon solo si previamente cumple al menos una de las siguientes condiciones:
- El FFD es el coordinador PAN de una nueva red.
- El FFD es un dispositivo asociado en una PAN previamente establecida.
3.9.2 Descubrimiento de un dispositivo
3.9.3 Asociación de un dispositivo
La asociación comienza con un sondeo activo o pasivo, luego de terminado el sondeo, el dispositivo selecciona el identificador PAN de la red a la que desea asociarse, entonces envía un paquete de datos al correspondiente coordinador solicitando la asociación.
Si esta petición es recibida correctamente el coordinador envía una trama ACK, para así confirmar la asociación. Sin embargo, el ACK de una petición de asociación no quiere decir que el dispositivo fue asociado; en efecto el coordinador necesita tiempo para procesar la petición y determinar si los actuales recursos de la PAN son suficientes para permitir otra asociación.
Si los recursos disponibles son suficientes, el coordinador envía una trama de respuesta de asociación que contiene la nueva dirección del dispositivo dentro de la red y el estado del dispositivo asociado. Si los recursos no son suficientes para permitir la nueva asociación, el coordinador envía una trama de respuesta de asociación con el estado de fallo en la asociación.
3.9.4 Disociación de un dispositivo
3.9.4.1 Coordinador inicia la disociación
Si el coordinador quiere disociar a uno de sus dispositivos, le envía una trama con esta notificación; cuando el dispositivo recibe esta notificación envía un ACK confirmando su recepción, si el ACK no es recibido por el coordinador, éste considera que el dispositivo está disociado, y todas las referencias con respecto a él son borradas de la PAN.
3.9.4.2 Dispositivo inicia la disociación
Si un dispositivo quiere dejar la red envía una notificación con este pedido al coordinador PAN.
Una vez que el coordinador recibe esta notificación envía un ACK al dispositivo confirmando su recepción. Si el ACK no es recibido por el dispositivo, este se considerará disociado. Y todas las referencias acerca de la PAN serán removidas por el dispositivo.
3.9.5 Sincronización
3.9.5.1 Sincronización en una red con modo beacon-habilitado
Todos los dispositivos asociados deben recibir y descifrar las tramas beacon de su coordinador y así sincronizar sus transmisiones.
3.9.5.2 Sincronización en una red con modo beacon-no habilitado
En este modo de beacon-no habilitado, la sincronización es ejecutada mediante el método de polling al coordinador por datos.
3.9.6 Transmisión y recepción de datos
3.9.6.1 Transmisión de datos
La transmisión de datos depende del modo de operación de la PAN. En una PAN con
beacon-habilitado un dispositivo que desee transmitir información debe localizar
tramas beacon de su coordinador y enviar la información de acuerdo con la estructura de la supertrama usando CSMA/CA ranurado (esto en el CAP, en CFP no realiza se contención). En una PAN con beacon-no habilitado los dispositivos usan CSMA/CA no ranurado.
• Transferencia de datos al coordinador:
Figura 3.13 Transferencia de datos en modo beacon-habilitado.
• Transferencia de datos desde el coordinador:
Figura 3.15 Transferencia de datos en modo beacon-habilitado.
3.9.6.2 Recepción de datos
Cualquier dispositivo puede recibir transmisiones de otros dispositivos, pero solo aceptará las tramas que estén dirigidas hacia él.
3.10 Aplicaciones
de
ZigBee
El estándar ZigBee se enfoca a aplicaciones con baja transmisión de datos y bajo ciclo de servicio de conectividad. La razón de promover un nuevo protocolo como un estándar es permitir la interoperabilidad entre dispositivos fabricados por compañías diferentes. Los mercados como la automatización de edificios y hogares, la atención sanitaria, control industrial, control de alumbrado y control comercial, son los principales campos de aplicación.
A continuación algunas aplicaciones potenciales.
3.10.1 Hogares automatizados
ZigBee habilitará los interruptores de luz en el hogar, disminuyendo costos y eliminando la necesidad de utilizar cables eléctricos para el control y de llamar a un electricista especializado si se necesita reubicar los interruptores.
- Sensores de movimiento
- Cerraduras electrónicas de seguridad con solo presionar un botón - Detectores de CO2
- Control de riego
Figura 3.17 Automatización de los hogares.
3.10.2 Cuidados en la salud
- Chequeo de signos vitales del paciente sin importar en qué lugar en el hospital se encuentre.
- Dispositivos con botones de alarma dentro del hogar, que pueden ser usados por personas ancianas o débiles.
- Monitoreo y reporte de signos vitales a largo plazo, con propósito de prevención con el fin de aplicar un diagnóstico temprano.
CAPÍTULO 4
|
“Resultados
CAPITULO 4. RESULTADOS EXPERIMENTALES
4.1 Diseño, construcción y caracterización del electromiógrafo
4.1.1 Fuente de alimentación
Para la fuente de alimentación se decidió utilizar pilas recargables de 9 volts, esto debido a que se adapta a los requerimientos de la circuitería, también permite un fácil transporte, esto es, sin la necesidad de llevar una fuente de gran tamaño, pero la característica fundamental, es porque el uso de este tipo de baterías permite despreciar los efectos indeseados de ruido que se pueden presentar con el uso de una fuente con toma de corriente de la línea eléctrica.
4.1.2 Electrodos
Se utilizarán los electrodos de superficie debido a que estos proporcionan mayor comodidad al momento de ser colocados, en comparación con los electrodos de aguja, además que estos nos permiten tomar mediciones en un determinado grupo de músculos, mientras que los segundos solo permiten la toma sobre una unidad motora.
4.1.3 Amplificación
resistencia. Además, su bajo nivel de ruido permite que este pueda ser implementado en aplicaciones médicas.
Figura 4.1 Diagrama de conexión interna del AD620
La resistencia externa a utilizar se obtiene a partir de la siguiente ecuación:
1 4 . 49 − Ω = G k
Rg (4.1)
Requiriendo una ganancia de 100 se tiene:
Ω =
− Ω
= 498.98
1 100 4 . 49 k Rg
Se decidió proponer esta ganancia dado que, como se menciona en la sección 1.4, se pueden registrar valores pico de 10 mV, de esta forma se puede obtener en la salida un valor máximo de 1 V, lo que facilita el diseño para las secciones posteriores.
Las imágenes anteriores muestran que efectivamente se realizo una amplificación de la señal con respecto a la ganancia propuesta de 100.
4.1.4 Filtro pasa banda
Para la implementación de este filtro, se requirió de dos filtros conectados en cascada (un filtro pasa-bajas y pasa-altas), con frecuencias de corte de 10 a 1,000 Hz, se utilizó el circuito integrado TL084, ya que este contiene cuatro amplificadores operacionales, lo que permite la reducción del tamaño en la construcción del filtro deseado. En la salida de cada etapa, se puede observar que se colocaron amplificadores operacionales en configuración seguidor, esto para separar las etapas y de esta forma evitar pérdidas de información.
Primeramente se mostrará el procedimiento para el cálculo de los componentes del filtro pasa-bajas.
(4.2)
Hay que tener en cuenta que para el diseño de este filtro R1=R2=R.
Se propondrán los capacitores, dado que existen un mayor número de valores de resistencias, lo cual hace más fácil el correcto diseño del filtro deseado.
Como se puede observar en el capítulo 1 apartado 1.5.3, se indica para estos filtros los valores para la frecuencia de corte, partiendo de lo indicado en la teoría se buscará obtener un corte en 1,000 Hz.
Proponiendo un valor para el capacitor de 100 nF, y sustituyendo los valores requeridos en la ecuación 4.2, se tiene que:
Ω ≈ Ω = = = = = ⇒ =
− 795 820
) 10 200 ( ) 1000 ( 2 1 2 1 200 ) 100 ( 2 2 9 1 1 2 1 x C f R nF nF C C C Siendo π π
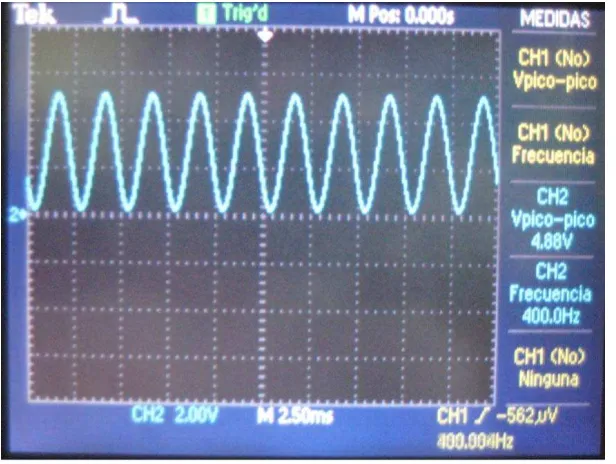
Con los valores previamente obtenidos, se procederá a montar el filtro y por medio de un barrido de frecuencias se verificará el corte en 1 kHz. Este barrido de frecuencias se realiza variando la frecuencia inyectada a la entrada del filtro, y con el osciloscopio observar que efectivamente la amplitud de la señal comienza a variar.
A continuación se mostrarán los resultados obtenidos.
Figura 4.5 Señal senoidal a 800 Hz.
Las imágenes anteriores nos muestran que efectivamente el corte se realizó en aproximadamente 1KHz, la línea que corta a la señal en la parte superior, es un cursor utilizado para mostrar un límite de 0.707 V, teniendo en cuenta que la amplitud de la señal es de 1 Vp.
Para el diseño del filtro pasa-altas se tiene en cuenta que:
C f R CR wc π 2 1 1 1 1 = ⇒
= (4.3)
Figura 4.7 Diagrama de un filtro pasa-altas activo.
Para el diseño de este filtro C1= C2= C, proponiendo un valor para los capacitores de
100 nF, y una frecuencia de corte de 10 Hz, estos se sustituirán en la ecuación 4.3:
Ω ≈ Ω = = ⇒
= − K K
x R
C f
R 159.154 160
) 10 100 )( 10 ( 2 1 2 1 9 1
Para el valor de R2, se considera la siguiente fórmula:
2
1 2
R
R = (4.4)
Sustituyendo:
Ω =
Ω
= K K
R 80
2 160
2
[image:81.612.123.507.367.659.2]Las imágenes de los resultados obtenidos son los siguientes:
Figura 4.9 Señal senoidal a 10 Hz
De la misma manera que en el filtro pasa-bajas, se puede verificar el corte de la señal a los 10 Hz deseados.
Figura 4.10 Esquemático del filtro pasa banda requerido.
4.1.5 Regulación de offset
La señal obtenida a la salida del filtro es de tipo bipolar (que tiene valores positivos y negativos), y tomando en cuenta que para el programa del convertidor analógico a digital del microcontrolador se utilizó como referencia el valor de la alimentación del pic, se necesita transformar a la señal de forma unipolar, por lo que se recorta y sujeta a un nivel de cd. Esto se realiza por medio de un circuito sujetador y recortador de nivel.
4.1.5.1 Sujetador de nivel activo