Módulo computacional para la actualización dinámica del nivel de tránsito en un modelo vial simplificado por medio del uso de imágenes de video
66
0
0
Texto completo
(2) ,. Indice Dedicatorias ................................................................................................................... iii Índice .............................................................................................................................. v Introducción ............................................................................................................. - l -. Problemática .......................................................................................................... - l Objetivos y metas ............................................................................................... - 2 Alcances del proyecto ........................................................................................ - 3 Estado del arte ....................................................................................................... - 9 -. En México .............................................................................................................. - 9 En el extranjero ................................................................................................ - 12 Base teórica ........................................................................................................... - 15 -. Las etapas básicas ............................................................................................. - 15 Segmentación de movimiento ........................................................................... - 16 -. Resta de fondo y métodos estadísticos................................................... - l 7 Adecuación de imágenes ............................................................................... - l 9 Umbralización .............................................................................................. - 19 Morfología. matemática ......................................................................... - 20 -. Dilatación .................................................................................................. - 22 Erosión ....................................................................................................... - 22 Opening y Closening (abrir y cerrar) ................................................ - 23 Clasificación de objetos ................................................................................... - 24 Seguimiento de vehículos ................................................................................. - 25 -.
(3) Proyecto de ingeniería computacional :;~~;:\ TECNOLÓGICO '·'·"" DE MONTERREY. Entendimiento del comportamiento ................................................................. - 26 Propuesta de Solución ........................................................................................ - 29 -. Metodología .......................................................................................................... - 29 Procesos ............................................................................................................... - 30 -. Obtención de fondo dinámico ...................................................................... - 30 Obtención de los objetos de interés ....................................................... - 33 Seguimiento ...................................................................................................... - 35 Caracterización de vehículos ................................................................ - 35 Determinar el vecino de cada vehículo ........................................... - 38 Algoritmo de seguimiento de vehículos ............................................. - 38 -. Conteo de vehículos ....................................................................................... - 40 Medición de velocidad................................................................................... - 40 Resultados ............................................................................................................... - 41 -. Consideraciones ................................................................................................... - 41 Valores entregados ............................................................................................ - 43 Tiempo de procesamiento ................................................................................. - 43 Conteo ................................................................................................................... - 44 Velocidad .............................................................................................................. - 44 Conclusiones y trabajo futuro ........................................................................... - 45 -. Conclusiones ......................................................................................................... - 45 Trabajo futuro ................................................................................................... - 46 -. VI. •.
(4) Índice. ·· ' TECNOLÓGICO • DE MONTERREY. Referencias bibliográficas ........................................................................................... 1. Artículos ....................................................................................................................... ! Páginas en Internet ................................................................................................ 111 Libro ............................................................................................................................ V Anexos .......................................................................................................................... VII. Anexo 1: Mediodía Solar ....................................................................................... VII Anexo 2: Diagrama de ubicación de la cámara ................................................ IX Anexo 3: Características del video procesado .................................................. X Anexo 4: Recursos utilizados ................................................................................ XI Anexo 5: Póster ..................................................................................................... XIII. VII.
(5) Proyecto de ingeniería comrutacional TECNOLÓGICO DE MONTERREY. VIII.
(6) Introducción Problemática Se encuentra la necesidad de los automovilistas de conocer el camino mas rápido de un lugar a otro. El diputado Jorge Triana Tena 1161. escribió: "Los traslados que realizan diariamente los habitantes de lo ZMVM (Zona Metropolitano del Valle de México), son en promedio codo vez más costosos (pues invierten dieciséis por ciento de sus ingresos poro poder transportarse), más largos en distancio y más largos en tiempo traslado. invertido en. poro realizarlos. promedio. ero. de. (hoce. diez años,. sesenta. y. dos. el tiempo. minutos,. de. hoy. el. promedio es de ochenta y un minutos)". Y aunque el conocer el camino más rápido puede ser sólo una comodidad, pasar mayor tiempo en el vehículo es en algunos casos crítico. Ejemplo de esto es el de un accidente con un paciente grave, en el cual una ambulancia debe ir por un accidentado y trasladarlo a la unidad médica pertinente, donde acortar el tiempo de traslado es vital. Obtener auxilio médico los primeros 15 minutos después de un accidente reduce el riesgo de intervenciones quirúrgicas en 50%. En un accidentado grave aumenta las posibilidades de sobrevivir en un 20% si llega a un hospital en menos de 30 minutos. Existen. varias. soluciones. tecnológicas. desarrolladas,. las. cuales. satisfacen de manera deficiente la situación. Como los servicios de información vial que no tienen información de todas las calles. ni. en. tiempo real o que dependen del criterio y el juicio personal para medir el tráfico. Es por eso que en este proyecto se pretende desarrollar un.
(7) ;~;. , y~. Proyecto de ingenieria computacional. ·-t~tif TECNOLÓGICO ·;''''hJ.c- DE MONTERREY ',.·.;,_·,.. 1. ~·. sistema que resuelva este problema de una forma objetiva, y dé un resultado en base a un análisis justificado.. Objetivos. y metas. El objetivo es crear un módulo computacional. de actualización. dinámica de la ponderación de un arco en un grafo, que represente el tráfico vehicular en una vialidad con el procesamiento de imágenes de video en condiciones representativas del caso general.. •. Las metas son: •. Establecer los algoritmos o técnicas adecuadas que en conjunto lleven al mejor manejo de los videos y al análisis eficiente de las imágenes presentadas.. •. Diseñar una arquitectura de pruebas con características claras y concisas. que. permitan. obtener. cuantitativa y cualitativa de los •. información. objetiva,. precisa,. resultados.. Implementar un prototipo funcional del módulo.. •. -2-.
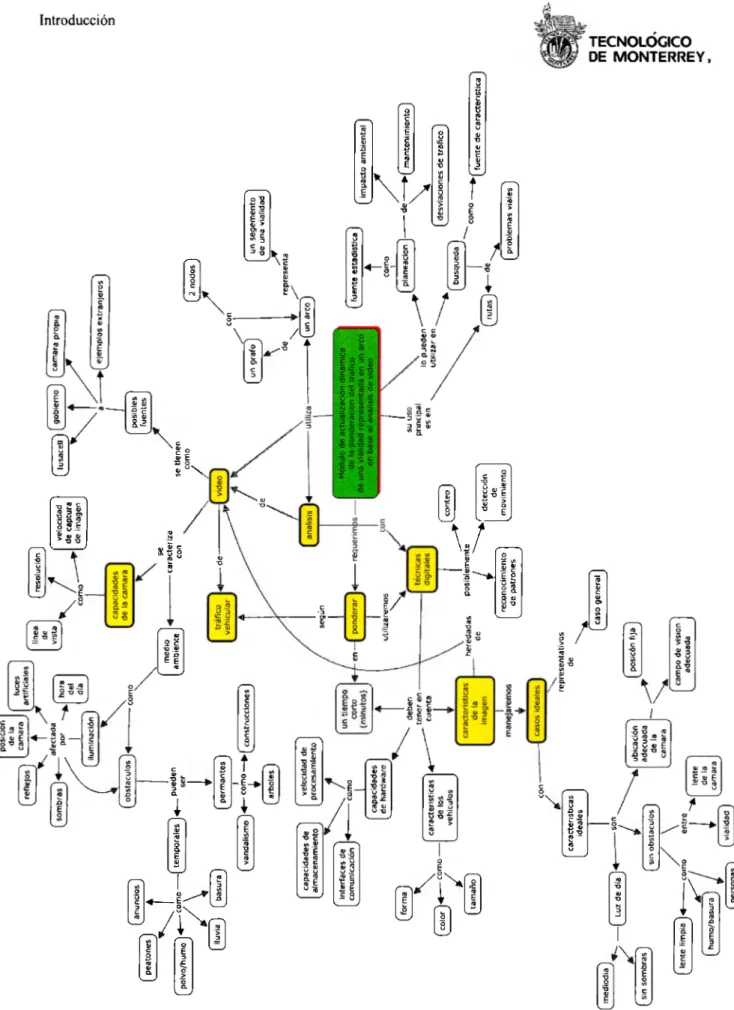
(8) Introducción. TECNOLÓGICO DE MONTERREY,. Alcances del proyecto Al. desarrollar. la. propuesta. de. solución. a. la. problemática. se. descubrió que, para el tiempo con el que se cuenta, el proyecto sería en su totalidad demasiado extenso. En la figura 1 se muestra el mapa conceptual del macro-proyecto en donde se observa que para resolver la. problemática. se. requieren. 3. procesos. principales:. modelado. de. situaciones (el mapa y sus características), obtención de información (las. características. de. las. vialidades). y. análisis. de. la. información. (selección de la ruta). Con el afán de mantener la meta de ayudar a obtener una mejor ruta se hace un enfoque en sólo una parte del macro-proyecto y se planea de forma modular. Se decide trabajar en la adquisición de información variante en el tiempo. Entonces el proyecto ponderará con respecto al tráfico vehicular un modelo computacional que representa una. vialidad.. proyecto. en. En base. la. figura al. cual. 2 se. muestra. se definió. el. el. mapa. conceptual. alcance del. proyecto,. del la. problemática, los objetivos y las metas. El video es el elemento clave del proyecto y respecto a éste se define el alcance detallado a continuación.. -3-.
(9) Proyecto de ingeniería computacional TECNOLÓGICO DE MONTERREY.. larcos l. que tengan. se pueden representar con. .,_ nodos •. 4. !grafos 1. se puede representar con. ( intersecciones ). ( origen )..____ ·'. ____,,(destino). ( particulares ). tienen. se Vialidades. puede modelar. \. con. ". " 4 - - d e - - - E ) . , . _ _ repr:enta--- region geografica. +,. ( automLilistas ). ------,. se refiere a. ~--------.r'. con. J. divididos en_______,..( de auxilio)-/. \. en. ( gubernamentales. \/. ( topografra ). en - _. ~. de desastres lo utilizarian. \. / --. - - ---'>« crítico para modelado de situaciones. tiene Que ver con. implica. '. ____,.-. datos -. ~. 't1 ~. ~o_b_t_en-c-io_n_d_e~~ de tiene que ver con. cantidad de tiem po utilizado. se enfoca en. definida por. depende de. analisls de la información. ...,___.~. ve locidad. distancia cambia con. ( topes ). respect~o a - - - - - . , - - - - - - - . . limitaciones del vehículo. ( calles cerradas ). +. ~\. se. ,------_--sJ+--- como ~ + - c l a s i f i c a n ( leyes de t r a n s i t o - ~ J ~ ( semaforos. J ( intersecciones ). obstaculos. características personales. ( diná~icos ) cambian cada. (rm-en_o_s_d_e_u_n_a=~~o-,a~) ( eventos sociales. ( baches ). ~ s de una hora ) - como,,--. ~ - - - ~ ---..,( hund1m1entos ). J...- - - - c o ~ o. (,-f-e-no-m-en_o_s_c_li_m_a"'~'-o-s~) ( A c c l ~ n ~ [ transito). \. se divide en. /. ~. \.. (peatonal). / .,'á- - ~. ( reporte 98.5) -. se mmonitorea con. '. como--[ tecnología) ~/ . .. ,-----... /. apoyo de ~ rediodifusoras - - c o m ~ ~. ( radio red ). Figura 1. Mapa conceptual del macro proyecto -4-. 8. medico.
(10) Introducción. TECNOLÓGICO DE MONTERREY .. o. ~. 11. .,. E. "' :li. e:. •O. ¡;". ~o 'O. m ~\/ i §. ~. E. 1' .!!!_ +. .". 'O. !\. "e E. ."". :2 V. :!!. ~ -5 "' ·a .,,. v.!,/. ~§. .! E e: o. -V. Figura 2. Mapa conceptual del proyecto. -5-. ~.
(11) Proyecto de ingeniería computacional - , TECNOLÓGICO DE MONTERREY,. Al terminar se tendrá un software prototipo capaz de comunicar un valor representativo del tráfico vehicular a un arco de un grafo modelado computacionalmente.. El. tráfico será el captado por una. cámara de video digital en una vialidad con las siguientes condiciones específicas: •. Iluminación o Medio día solar (ver anexo 1). •. Ubicación o Sobre una v1a rápida o. Alejado a más de 100 metros de alguna intersección vial o peatonal. o. •. En zonas con asfaltado en buenas condiciones. Posición de la cámara o Fija o. •. Altura de seis metros sobre el asfalto. Campo de visión o Al menos 100 metros de la vialidad o Frontal a los autos (sólo un sentido). -6-.
(12) Introducción ·· . TECNOLÓGICO DE MONTERREY. El. proyecto. se. basará. en. artículos. y. técnicas. sobre. la. caracterización del tráfico por medio de 1magenes de video existentes Gracias ofrecen. al. otros. desviaciones. carácter usos,. para. modular. por. liberar. del. ejemplo, el. tráfico,. mantenimiento del asfaltado, etc.. -7-. proyecto. los. datos. obtenidos. controlar. semáforos,. planear. estudios. ambientales,. planear.
(13) Proyecto de ingeniería computacional. ' :;}:. ··ft ·{: TECNOLÓGICO ,~~_., DE MONTERREY • ,_-¡ \ ~,. -8-.
(14) Estado del arte Hoy. en. día. existen. diversos. grupos. de. personas. que. dedican. esfuerzos a generar una medida del tráfico vehicular, así como a la investigación de mejoras de los procesos y algoritmos involucrados y/o relacionados con estos sistemas. Aquí serán expuestas varias de estas acciones tanto en México como en el extranjero.. En México Una de las soluciones para conocer el estado de la circulación en una. arteria. vial,. es. mediante. los. servicios. que. ofrecen. compañías. telefónicas. En el contexto nacional, se encuentran diversas empresas que. ofrecen. esta. información.. Una. de. ellas,. lusacell,. mantiene. el. servicio *VIAL de información del tráfico y localización de direcciones marcando *8425, actualmente con un costo de $2.87 M. N. por minuto. Telcel, cuenta con un servicio similar para sus clientes. Al marcar *RUTA un operador le informa al cliente sobre el estado del tráfico actual y las alternativas de rutas para llegar a un destino con un costo de $3.45 M. N. para equipos Amigo, o bien de acuerdo al plan. Tanto *VIAL como *RUTA tienen la desventaja de disponibilidad únicamente para el Distrito Federal y Área Metropolitana, y cada cual brinda el servicio sólo a sus clientes. Otra solución, es el servicio Traficam de lusacell, que consiste en la transmisión de videos del tráfico de algunas vías principales en tiempo real, para lo cual se requiere un equipo con tecnología TOMA o GSM. El servicio de Traficam sólo está disponible en Monterrey y Matamoros..
(15) Proyecto de ingeniería computacional. .'\}J' it~rir. TECNOLÓGICO DE MONTERREY. Por otra parte, la Secretaría de Transportes y Vialidad también. tiene. una. medida. para. (SETRAVI),. informar el estado del tránsito. en. algunas vialidades. A través de su página en Internet 117 1, se accede al Radar Vial donde diariamente se reportan las condiciones viales del Distrito Federal cada cierto tiempo, este varía entre diez minutos y una hora. No obstante, sólo se hace de algunas vías y la información que aparece tiene retrasos de una hora o mas, en ocasiones se cae el servidor que alberga esta pagina. Tal vez las entidades más consultadas para saber que tanto tráfico hay en las principales v1as, son las diversas radiodifusoras y televisaras nacionales las cuales. generan un informe. en. tiempo real. sobre. el. estado del tráfico en sus estaciones como parte de sus actividades. Éstas son una buena fuente de información para cualquier conductor, pues proporcionan las vías alternas más convenientes, no obstante, se informa sobre el estado de vialidades que no necesariamente le son de utilidad al automovilista, y en el caso de las televisaras, es poco factible ver el noticiero mientras se maneja. Algunas de las emisoras que proveen este servicio son: •. Grupo. Radio. Centro:. 790. AM,. Formato 21,. reporta. cada. diez. minutos. •. Grupo Monitor: Radio Monitor 1560 AM y 1320 AM.. •. Radio Noticias: La red 95.7 FM.. •. Grupo Acir: 88.9 Información que sirve, reporta cada 15 minutos. •. Televisa: 1ro. Noticias de 6:00 a 9:00 am por el canal 2. •. TV Azteca: Hechos am de 6:00 a 9:00 am por el canal 13 - 1O -.
(16) Estado del aitc. :\:¡fi/ .TECNOLÓGICO \·,t''fk' ,,.,,-,,. •. Muchas. estaciones. de. mus1ca. tiene. DE MONTERREY. reportes. viales. entre. canciones. Como informar. se expone,. sobre. las. diversos. vialidades. organismos generan mas. propuestas. congestionadas,. mas. se. para siguen. buscando soluciones que integren la mayoría de las ventajas de los sistemas anteriores y eliminen sus desventajas. Una de estas soluciones es la propuesta por las alumnas Marlen Garnier y Tabata Pérez de la del. ESCOM. Instituto. Politécnico. Nacional. (IPN),. quienes. crearon. el. Sistema de Navegación Vial en el Distrito Federal 118l 119 l 120 i. Este consiste en un portal accesible a través de celulares, agendas electrónicas y computadoras portátiles, el cual genera una propuesta de ruta óptima entre dos puntos mediante un algoritmo de inteligencia artificial que considera criterios como la velocidad a la que circulan los vehículos y la permitida por el reglamento de tránsito del D. F.; el sentido de las la. calles;. clasificación. proporcionar. de. calles;. entre. otras.. El. usuario. debe. la delegación, colonia, calle y esquina, tanto del lugar. en que se encuentra, como del lugar al que va. Por ahora sólo está disponible para las delegaciones Cuauhtémoc y Venustiano Carranza y requiere. de. un. operario. que. inserte. los. valores. ponderados. que. interpreten las cualidades del tráfico. Si bien esta última es una de sus desventajas, puede ser un campo de interés para el proyecto aqu1 presentado, ya que se pueden tomar en cuenta los resultados de este proyecto. dentro. del. Sistema. de. Navegación.. Esto haría. un sistema. capaz de actualizarse de forma automática con información en tiempo real,. y. específicamente. de. la. ruta. que. características que pocos sistemas ofrecen.. - 11 -. al. usuario. le. interesa,.
(17) ,_,. ~·r.. Proyecto de ingeniería computacional. t~f.hJ ,y./f. TECNOLÓGICO DE MONTERREY. En el extranjero Por su. parte, en el ámbito internacional, se tiene una extensa. investigación en este campo, ya sea directa o indirectamente aplicada a la detección de automóviles en imágenes de video para producir una medida del tráfico. En algunos países como Estados Unidos de Norteamérica, se cuenta, en algunos casos, con una estación de radio de AM para informar sobre la vialidad. También se tienen informes en letreros. electrónicos. para. avisar. a. los. automovilistas. sobre. las. condiciones del tránsito en los siguientes kilómetros, con la distancia suficiente para poder tomar una alternativa. En varios. pa1ses ya se cuenta con cámaras. que mandan una. imagen en tiempo real de una parte específica de la ciudad y ahí se puede observar la imagen y cada quien juzgar con su propio criterio si esa avenida es una alternativa o no. Hay. algunos. auto. estéreos. que. cuentan. con. un. sistema. de. detección de noticias en la radio (RDS), es decir que cuando hay un informe. vial. en. cualquier. estación. de. radio,. el. radio. cambia. automáticamente a la estación que está emitiendo la noticia, y al finalizar la noticia regresa a la estación anterior, con la finalidad de que el conductor escuche la noticia, por si es una noticia que tiene que ver con la ruta que está siguiendo. La desventaja de este sistema, es su imposibilidad de saber dónde se encuentra el vehículo en ese momento para poder determinar si la noticia es o no de interés para el conductor.. - 12 -.
(18) Estado del arte ,. TECNOLÓGICO DE MONTERREY. Lo que se menciono anteriormente son los casos que ya están implementadas. en. otros. pa1ses,. pero. además. hay. investigaciones. constantes sobre cómo hacer una mejor medición del tráfico, para poder disminuir. los. tiempos que se requieren para trasladarse de un. lugar a otro, con el fin de optimizar los medios de transporte modernos. Hay varios artículos que detallan algunas de las técnicas, que pueden ser de utilidad para este proyecto, casi todas ellas pertenecientes a la rama de lntelligent Transport System (ITS), que se detallarán en la Base Teórica de este documento.. - 13 -.
(19) :~~. ;;.. Proyecto de ingeniería computacional. '.f~r~{ 6~c~g~~~~~y. •. •. - 14 -.
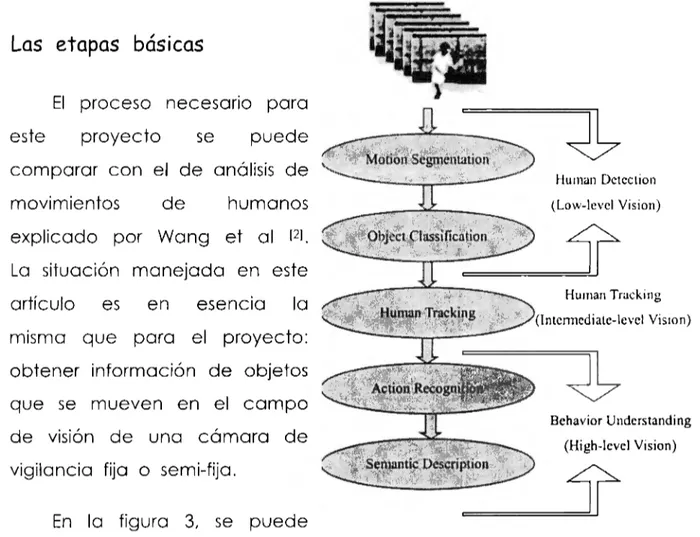
(20) Base teórica Para. obtener. las. características. relevantes. del. tráfico,. como. cantidad de autos por unidad de tiempo y velocidad promedio, se requieren. diversos. algoritmos,. técnicas. y métodos,. éstos. ya. se. han. estudiado y desarrollado. A continuación será resumida la investigación hecha sobre éstos.. Las etapas básicas El proceso necesario para este. proyecto. puede. se. comparar con el de análisis de movimientos. Motion. Scgmentiúon Human Dctcclion. humanos. de. explicado por Wang et al 121.. (Low-levcl Vision). ·Objcct Classification. La situación manejada en este artículo. es. en. esencia. la. Human Tracking. (Intcm1cdialc-levcl Vis1on). misma que para. el. proyecto:. obtener información de objetos que se mueven en el campo Behavior Undcrstanding. de visión de una cámara de. (High-lcvel Vision). vigilancia fija o semi-fija. En la figura 3, se puede ver. el. proceso. más. común. para este tipo de análisis.. Figura 3. Análisis de movimiento de humanos. Esta sección se dividirá con respecto a esta estructura, luego de ser modificada para considerar a los objetos como vehículos..
(21) Proyecto de ingeniería computacional. Segmentación de movimiento Este. primer. paso. se. basa. en. el. objetivo. del. análisis:. obtener. información del movimiento de los objetos de interés. Se requiere por lo tanto ser sensible al movimiento. Las opciones encontradas son: •. Resta de fondo El. fundamento. de. este. método. es. en. situaciones. con. fondo. relativamente estático en donde todo lo que se mueve es aquello que es diferente al fondo. Sus resultados están muy ligados al fondo y su inmutabilidad. •. Métodos estadísticos Inspirados en el concepto de la resta de fondo, estos métodos. tienen un. acercamiento similar con los cuales deciden si el objeto. pertenece al fondo o es un objeto en movimiento en base a modelos estadísticos de comportamientos periódicos, lentos o sutiles. Pueden ser generados dinámicamente y reaccionan mejor a los cambios que los modelos simples de resta de fondo. •. Diferenciación temporal Se basa en el concepto de que en dos imágenes consecutivas. los objetos que se mueven, cambian en algunos parámetros y en otros no. Este método busca las diferencias entre imágenes para observar el movimiento, marca contornos de movimiento y es altamente adaptable al ambiente.. - 16 -.
(22) ,·. Base Teórica. •. .. ;,,. '. '. .. .. .. .... .. . .. ;,;~t 6~c~g~1~~~v. Flujos ópticos (optical flows) Los. flujos. describen. movimiento. coherente. de. vanos. puntos. o. pixeles entre imágenes consecutivas. Es eficiente para buscar y trazar trayectorias. La opc1on mas concordante con nuestra situación y requerimientos es. la. resta. de. fondos. por. lo. que. se. hizo. una. investigación. a. profundidad sobre este tema.. Resta de fondo y métodos estadísticos En el artículo de Oral y Demiz [11. exponen puntos clave para. escoger apropiadamente la técnica adecuada de resta de fondo y dicen. "un. buen. modelo. de. fondo. debe. de. tener. las. siguientes. propiedades": •. Inmunidad al ruido.. •. Insensibilidad a cambios de iluminación. [11. •. Adaptabilidad a cambios en el fondo inicial. r31. •. Insensibilidad al movimiento repetitivo.. •. No causar deformaciones de los objetos en pnmer plano.. •. Necesitar la menor cantidad de operaciones de post procesamiento posibles.. •. Rápido y confiable. [1DJ. •. Fácil de implementar.. - 17 -.
(23) /~· ·<:1·. Proyecto de ingeniería computacional. ·;fJtif' \,}'.t': 1. TECNOLÓGICO DE MONTERREY. Los autores exponen varios métodos y los comparan dando un estándar de comparación. Se enlistan los métodos trabajados por otros autores: •. Método. de. resta. de. fondo. simple. (Simple. background. subtracting method). El. •. Modelo de medianas {Median model). •. Modelo de fondo adaptativo {Adaptative background model). •. Modelo de doble fondo (Double background model). •. Diferencia simple estadística (Simple statistical difference). •. Modelo de diferencia max1ma {Maximum diference model). •. Prueba de similitud de rango (Likelihood ratio test). •. Modelo de centro de masa (Centre of mass model). primer punto a. ambientes. controlados. considerar es el ambiente. Si con. pocos. o. casi. nulos. uno considera cambios. a. la. percepc1on del fondo (iluminación, objetos que se hacen fondo, etc.) las opciones simples dan resultados eficientes en unidades de tiempo de procesamiento vs. porcentaje de errores de detección, mientras que en. ambientes. adaptativas. no. para. controlados obtener. un. se. deben. porcentaje. de de. aplicar. error. de. aceptable aunque se aumente el tiempo de procesamiento.. - IX -. funciones detección.
(24) Base Teórica. ;i~Jlf· TECNOLÓGICO \;'fJ; DE MONTERREY. Adecuación de imágenes En general cada método de segmentación tiene situaciones en las que. el. resultado. es. inapropiado. otras. y. en. las. que. da. el. mejor. resultado y aun así dan imágenes con ruido u objetos deformes por lo que se utilizan operaciones en imágenes para adecuar las imágenes a los requerimientos para las siguientes etapas de procesamiento Umbralización La umbralización es una forma de segmentar una imagen en dos o más regiones, a partir del valor de intensidad de cada píxel con respecto a. un valor determinado que es llamado valor de umbral.. Generalmente. se. realiza. primero. un. análisis. del. histograma. de. la. imagen. En este ejemplo, se muestra una imagen y su histograma a la cual se le aplica una. umbralización binaria.. ,,,, Figura 4.lmagen original. hJl ~ 1!..'. ,.· 1()(1',. lilll'll'-llll',. Figura 5. Histograma de la imagen original. El proceso de umbralización binaria, determina que:. /2(x, v). ·. ={. ]. si J(x, \'.)?. T. ·. O si J(x, r) < T. Donde T es el valor de umbral, e 12 es la imagen resultante.. - 19 -.
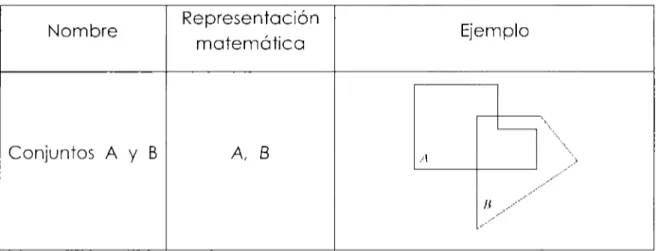
(25) Proyecto de ingeniería comrutacional TECNOLÓGICO DE MONTERREY. Al aplicar la umbralización, la imagen umbralizada se vería de la. •. siguiente manera:. Figura 6./magen umbra/izada. Morfología. matemática. Es una herramienta que utiliza operaciones lógicas para obtener componentes. útiles. de. la. imagen,. tales. como. orillas,. esqueletos. y. cascarones, con fundamento en la estructura y forma de los objetos en la imagen. La. tabla. muestra. las. operaciones. lógicas. que. utiliza. la. morfología matemática. Tabla 1. Operaciones lógicas de conjuntos. Nombre. Representación matemática. Conjuntos A y B. A B. Ejemplo. 1. ;\. ¡¡ [. - 20 -. .. ·. •.
(26) Base Teórica TECNOLÓGICO DE MONTERREY. AND. AnB (intersección). OR. AuB (unión) AUIJ. NOT. (complemento) (A)". Diferencia. A-B A - /J. - 21 -.
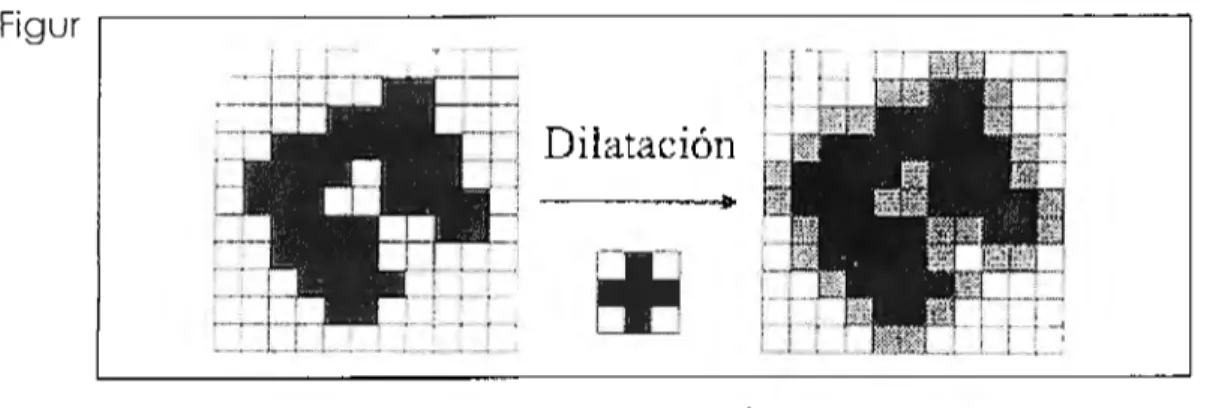
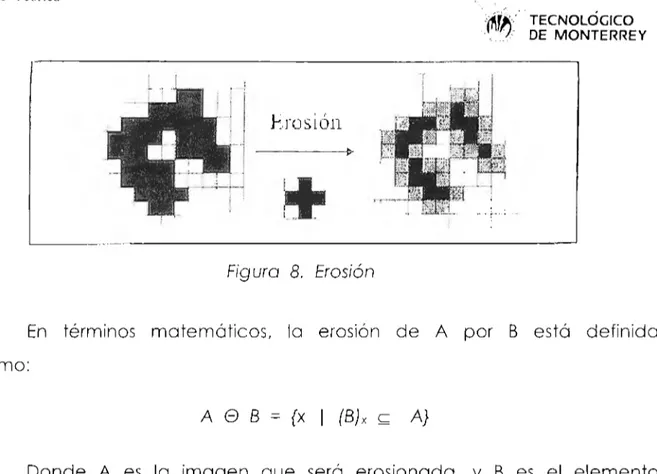
(27) Proyecto de ingeniería computacional. ·\~r,J/ .TECNOLÓGICO >, }J' DE MONTERREY. Existen diversas operaciones morfológicas como: dilatación, erosión y combinaciones de las dos anteriores como opening y closing. Estas. operaciones tienen un resultado dependiente de la forma del elemento estructurante, representado por una matriz de Os y 1s.. Dilatación Es una operac1on que engrosa objetos de una imagen binaria. (Figur. Dilatación ------+. Figura 7. Dilatación. En términos matemáticos, la dilatación de A por B está definida como:. Donde A es la imagen que será dilatada, y B es el elemento estructurante.. Erosión Es la operac1on contraria a la dilatación, adelgaza objetos de una imagen binaria. (Figura 8). - 22 -. •.
(28) Base Teórica. l ' .i. .!. 1. ·-1. Erosión ---~j>. :+ Figura 8. Erosión. En. términos matemáticos, la eros1on. de A. por B está. definida. como: A 8 B = {x. 1. {B)x. ~. A}. Donde A es la imagen que será erosionada, y B es el elemento estructura nte.. Opening. y Closening (abrir y cerrar). Estas operaciones son compuestas. por una operac1on. dilatar y. otra erosionar con el mismo elemento estructurante. En "Abrir" primero es erosionar y luego dilatar y en "Cerrar" lo contrario y su efecto se describe con su nombre, tiene como beneficio mantener intactas las dimensiones. de. los. objetos. originales. mientras. se. detalles.(Figura 9). -· Figura 9. a) Original, Opening, Closening. -. L_) -. marcan. algunos.
(29) Proyecto de ingeniería computacional. .:Y~tkf TECNOLÓGICO \}J'. DE MONTERREY. Clasificación de objetos En esta etapa se debe de discernir entre los objetos que se mueven y sólo caracterizar a los que nos interesan: los vehículos. En Wang et al. 12l. se mencionan los siguientes métodos de. clasificación: •. Clasificación basada en forma (Shape-based) Para. métodos. estos. relacionadas. únicamente. se con. utilizan los. características. objetos. de. interés,. de. la. como. forma son. el. tamaño, el color y la silueta. Por ejemplo, para un vehículo la silueta es de forma rectangular en su moyana y su tamaño es mucho más grande que el de una persona, conjuntos. de. pixeles. en. por lo que si se apartan a. movimiento. que. cumplen. con. los. estas. características se obtienen los vehículos y los que no lo cumplen no son vehículos. •. Clasificación basada en movimiento (Motion based) Estos métodos utilizan características del movimiento relacionadas. únicamente. con. los. objetos. de. interés,. como. son. la. dirección,. periodicidad y sentido. Por ejemplo, en una toma de vigilancia de un parque con una calle lateral,. los vehículos son aquellos conjuntos de. pixeles que sólo tienen una dirección y un sentido dado por las leyes de tránsito en la zona de la calle, los demás no son considerados vehículos.. - 24 -. •.
(30) \Ir. Base Teórica. ,,,,. -,,,,. TECNOLÓGICO DE MONTERREY. Seguimiento de vehículos Esta etapa permite caracterizar a los objetos de interés en el tiempo. e. implica. relacionar. los. objetos. de. interés. en. 1magenes. consecutivas. Existen herramientas matemáticas útiles como el filtro de Kalman, el algoritmo de condensación y las redes bayesianas dinámicas. En Wang et al 12l al se mencionan los siguientes acercamientos al seguimiento: •. Seguimiento basado en el modelo. Según el modelo que se tiene del objeto de interés se compara. imagen por imagen y se caracterizan sus cambios en el tiempo. Por ejemplo, si un vehículo se modela como los contornos de una caja, cada caja se compara imagen por imagen para buscar similitudes, como. la. parecidos. relación se. de. diámetro. consideran. el. con. mismo. orea.. Si. son. vehículo. y. se. suficientemente caracterizan. los. cambios en el tiempo, como pos1c1on, velocidad y sentido.[ 7 l •. Seguimiento basado en la región. La idea de este. método es identificar una reg1on. conectada. asociada con cada objeto en movimiento y seguir usando medidas de correlación cruzada. Por ejemplo, una persona se puede representar con varios blobs: brazos, torso, piernas y cabeza. Cada blob se sigue por separado y se relaciona en base a su cercanía con los demás blobs que pertenecen al mismo objeto.. - 25 -. De tal forma que un blob.
(31) Proyecto de ingeniería computacional. :r~j{. TECNOLÓGICO. c-J'"t'J._,'. .. DE MONTERREY '. ~~. brazo en la imagen anterior y en la actual deben estar muy cerca de los blobs torso y cabeza. •. Seguimiento basado en el contorno activo. Este seguimiento se basa en tener cada contorno de los objetos. de interés de cada imagen, se buscan los mismos y luego se realizan las actualizaciones. •. Seguimiento basado en características puntuales. Este método se sostiene de la idea de que algunas características. puntuales, (puntos, líneas o ángulos) son las que identifican a un objeto y no cambian en el tiempo. Así las relaciones son hechas con partes del objeto de interés y no con todo el objeto. [81. Entendimiento del comportamiento Esta es la última etapa del procesamiento, y es la que recopila todos los datos obtenidos por las anteriores etapas para proporcionar información específica. Aquí no hay métodos claramente clasificables, entonces. se. hablará. de. los. usos. principales. que. le. dan. a. la. información. En cuestión de vehículos en movimiento se encontraron tres usos para el análisis de imágenes de video: •. Sistemas de transporte inteligentes La información de interés se relaciona con las vialidades y es la. cantidad, la velocidad, la trayectoria y el tamaño de vehículos circulan en un cierto tiempo.. - 26 -. que.
(32) Base Teórica . TECNOLÓGICO DE MONTERREY. •. Sistemas de asistencia al conductor La información de interés se relaciona con el ambiente cercano. al vehículo con el sistema y es la distancia, posición y velocidad de los objetos alrededor. (Utiliza también sensores que no son cámaras) •. Sistemas de vigilancia y administración de recursos La información de interés se relaciona con puntos de movimiento. y es en la misma que las dos anteriores y en adición identificación. particular.. - 27 -.
(33) Proyecto de ingeniería computacional. \. ~.\ .~::'{ :TECNOLÓGICO ,l'•.--; 11,,t:).." DE MONTERREY ._~-. - 28 -. •.
(34) Propuesta de Solución La. propuesta. de. solución. surge. del. proceso. por. el. cual. el. proyecto se llevó a cabo. Este proceso se divide en varias etapas, las cuales se documentan a continuación en la Metodología.. Metodología Una vez que se tuvo el proyecto seleccionado con base a la propuesta del equipo y la aceptación del profesor, se llevó a cabo una planeación inicial. Ésta consistió en desarrollar un plan de trabajo al cual apegarnos y tener una idea general de lo que se iba a llevar a cabo. Siguiendo este plan el siguiente paso fue la investigación de las diferentes técnicas que podrían ser de utilidad para el desarrollo del proyecto.. Una. vez. documentación,. terminada. para. la. investigación,. poder discernir entre los. se. llevó. a. cabo. la. artículos y algoritmos. útiles y los que no. Para la selección los puntos de referencia fueron las cualidades. de la imagen y de la. toma. (ángulo,. color,. ambiente).. Después para llevar a cabo el desarrollo del proyecto fue necesario hacer adaptaciones a los algoritmos encontrados en la investigación, y hacer combinaciones de las diferentes técnicas para poder desarrollar nuestro proyecto y que cumpliera con nuestras expectativas. Se hicieron algoritmos. y. diagramas. de. flujo. para. describir. el. software. a. ser. implementado en MATLAB. A continuación se empezó la programac1on, etapa. en. la. continuamente. cual de. los. se. hicieron. algoritmos,. adecuaciones los. códigos,. las. y. adaptaciones. funciones. y. los. coeficientes. Todo este proceso de mejora se llevó a cabo en base a pruebas y sus resultados. Se llevaron a. cabo evaluaciones. de los. resultados de las diferentes modificaciones que hubo en el código y en base a eso se definió el código final. Como última etapa se hizo el.
(35) Proyecto de ingeniería computacional. análisis de los resultados. obtenidos comparándolos con los objetivos. planteados y los posibilidades que se abrían poro el trabajo futuro.. Procesos Se seleccionó entregar los valores de cantidad de vehículos por minuto y lo velocidad de codo carril o causo de lo flexibilidad poro ponderar el tráfico en base o estos valores. Poro obtener estos valores implementamos un algoritmo y tiene los siguientes subprocesos. Obtención de fondo dinámico Aunque en el alcance se limitó o lo situación de tal formo que se pudiera utilizar un método simple de resto de fondo, se investigó un método que proporcionara los puntos antes citados que debe tener un modelo del fondo poro exteriores. Se utilizó el método propuesto por Bailo et al. 141. el cual es uno mejoro al propuesto por Stouffer y Grimson. [6]. Este método trabajo con el concepto de que si un pixel repite continuamente su intensidad con uno cierta variación definida, este comportamiento se puede modelar con uno distribución normal. Si se modelo la intensidad de un pixel en varios distribuciones normales, se puede deducir que lo distribución con mayor población y menor varianza es lo que mejor representa al fondo. Para esto se tiene que lo historio de lo intensidad de cierto pixel es (ecuación 1):. X· 1·. 1 1-. X" T 'tJ. · ··· -. :J (Xo, y,¡. Í ) :. 1 <·: i <: t). - 30 -. (1).
(36) Propuesta de solución. Donde intensidad. se. del. probabilidad. refiere. pixel. de. de. a. la. la. encontrar. secuencia. pos1c1on un. valor. de. {xo,Yo} del. imágenes,. en. pixel. el de. tiempo la. es. Xt i.. historia. la. Y la en. K. distribuciones normales es (ecuación 2): K. (.::) j=]. Donde K indica la cantidad de distribuciones Gausianas utilizadas. wi,t. es el parámetro para describir qué cantidad de los datos está. representando. la. distribución. 1-es1ma.. í1. representa. la. distribución. Gausiana con parámetros: µt media en el tiempo t y It es la matriz de co-varianza en el tiempo t. Para representar este comportamiento se revisa si el valor de cada. pixel. a. cada. trame. entra. en. el. rango. de. 2.5. desviaciones. estándar en una distribución, y se revisan las distribuciones en orden hasta que entre en una, y si no es así se crea una nueva distribución donde la media sea el nuevo valor,. la varianza sea la máxima y se. asigna como la última distribución a revisar. Si entra en el rango de alguna. distribución. se. actualizan. sus. valores. representativos. de. siguiente manera (ecuaciones 3, 4 y 5):. (3). P: = ( l - P)Pr-1 + pXr. (4) (}). - 31 -. la.
(37) Proyecto de ingcnicria computacional. '· -.·,. )~r~r 6~c~g~1~~~y. µ es la media y 02 en. el. tiempo. indicado. ~. es la varianza de la distribución afectada en. el. subíndice. p. es. la. probabilidad. encontrar el valor del pixel en una distribución estándar ri. de. modificada. por a, tasa de aprendizaje del fondo, y con parámetros: µk media y ok desviación estándar de la distribución k Y se actualiza para todas las distribuciones (ecuación 6):. (6) wk. es. un. parámetro. que. describe. la. cantidad. de. datos. (población) que representa la distribución k y en el tiempo t, donde Mk,t es 1 s1 la distribución fue la actualizada y O si no. En. base. a. hicieron. se. esta. modelación siguientes. las. modificaciones, con el objetivo de disminuir. el. tiempo. Vecino. Vecino. Vecino. Vecino. Pixel procesado. Vecino. Vecino. Vecino. Vecino. de. procesamiento dedicado a crear y mantener. el. fondo. en. base. al. estudio realizado por Bailo et al 141: •. Un. pixel. puede. representar el. comportamiento. de. por. se. lo. que. sus vecinos realiza. procesamiento de un. el. pixel de. cada nueve, de tal forma que el. pixel. procesado. indique. la. pertenecia a la distribución de los vecinos tipo 8. (Figura l O). - 32 -. Figura 1O. Vecinos de un pixel.
(38) Propuesta de solución. ,\~y~/·. TECNOLÓGICO. \ ._f1,; DE MONTERREY. Por lo que sólo con el pixel central de cada cuadro de 3x3 pixeles se decide la pertenencia a la distribución, y cuando se actualiza, sólo este pixel lleva todo el proceso de actualización, mientras en sus vecinos sólo se actualiza la media. •. Se utiliza una imagen en niveles de grises.. •. Se. realiza. la. operación. de. actualización. del. fondo. cada. cinco. imágenes, al momento de hacer el seguimiento. Se toman los siguientes valores para el proyecto: •. Se inicializan las medias con un valor de 127 (punto media en el rango de la escala de grises (0-255) con una desviación estándar de 127.. •. Se utiliza una tasa de aprendizaje de 0.2 por la lentitud de los cambios en el fondo.. Obtención de los objetos de interés En. esta. etapa. se. utiliza. el. fondo. creado. según. el. modelo. dinámico para segmentar objetos de interés de la imagen usando una operación de diferencia absoluta como primer paso. El resultado de ésta es una imagen en donde la mayoría de los pixeles tienen valores cercanos al cero y los pixeles pertenecientes a los objetos de interés tienen valores de intensidad superiores a éstos. Contando con este comportamiento se hace una umbralización en un nivel del 15% de tal forma que los pixeles de los objetos de interés tomen el valor de uno y los demás de cero. Se obtiene así una imagen binaria (O y 1) como la que se presenta en la figura 11. - 33 -.
(39) Proyecto de ingeni ería computacional . TECNOLÓGICO DE MONTERREY ,. En esta imagen se notan huecos en los objetos de interés, y algunos. pixel es. no. pertenecientes. características no deseadas continuación. de. la. para. a. los. vehícu los. (basura) ,. los procesos siguientes.. umbralización. se. hace. una. ambas. Por ello a. operac1on. de. eliminación de objetos con orea menor a 30 pixeles puesto que en las pruebas realizadas se obtuvieron sólo 15 imágenes de 900 con basura. Para eliminar los espacios internos en los automóviles, se utilizó la operac1on. morfológica. elemento. estructurante.. acuerdo al. cerrar. el. fijó. de. Se. grande. a. rellenar, el caso de un parabrisas,. y. como. espacio. de. elemento. más. estructurante. --. a. una. =. matriz cuadrada unitaria de l 3xl 3. El efecto de esta operación fue el. deseado;. sin. embargo. dio. un. efecto secundario: unir vehículos que estaban. separados.. pruebas. con. otras. elementos. diferentes. operaciones,. estructurantes. secuencias, Se. similares.. En. seguimiento. se. obtuvieron. optó a. por este. y. resultados. adaptar. el. problema Figura 11. Umbralización. reducido.. Se aplicó una operación morfológica de abrir, modificada para marcar más las separaciones sin reducir el tamaño de forma excesiva en. los. vehícu los pequenos.. Al. erosionar. - 34 -. se. utilizó. como. elemento.
(40) .,' ~:,·. Propuesta de solución. ~\"<.:\,;>}i\'. ". ,:'1i8'\. TECNOLOGICO. J/llf.'J/ DE MONTERREY ',\,,,.. estructurante una matriz cuadrada unitaria de 9x9, y al dilatar como elemento estructurante una matriz cuadrada unitaria de 7x7. La imagen resultado tiene objetos que corresponden a vehículos con bordes definidos y ningún espacio interno y es con la que se trabaja en el seguimiento.. Seguimiento Este proceso se realiza cada cinco 1magenes, ya que se observó que con este frame step se disminuye el tiempo de procesamiento. y. se obtiene un error de conteo de 2.5% y de velocidad de 4%. El algoritmo de seguimiento que se llevó a cabo fue basado en el. documento. de. Haidarian. et. al. [81 el. cuál. utiliza. características. puntuales relacionadas a los vehículos al limitar las situaciones posibles. El. primer. características. paso de. los. para. realizar. vehículos. el. seguimiento,. necesarias. para. es el. obtener. las. algoritmo. de. seguimiento. Caracterización de vehículos Para realizar esta caracterización, la imagen obtenida con objetos de interés se divide en sub-imágenes, cada una tiene los vehículos de un solo carril. Una vez que se tiene cada carril, se caracterizan los vehículos de que concuerdan con la siguiente definición de vehículo. Un vehículo es un objeto que: •. Inicia cuando hay dos filas adyacentes de pixeles con mas de nueve pixeles blancos.. - 35 -.
(41) ,',•. Proyecto de ingeniería computacional. ~). .::~r,/· TECNOLÓGICO \,}l. •. Termina cuando ya no hay dos filas. DE MONTERREY. de pixeles con más de. nueve pixeles blancos adyacentes. •. La cantidad de líneas blancas entre el inicio y el fin es mayor a seis líneas. •. Está. delimitado por el conjunto de líneas con. pixeles. blancos. ubicadas entre el inicio y el fin Esta definición se hizo a causa de: •. Los. vehículos. con. dimensiones menores. tienden. a. aparecer y. desaparecer, por lo que se toman en cuenta hasta que son de un tamaño estable. •. Al no tener carriles laterales la única medida representativa es la altura. Si hubiera carriles laterales se tendría. que definir cómo. diferenciar autos vecinos de forma lateral. Para. el. seguimiento. se. requieren. dos. características. de. cada. vehículo (Figura 12): •. Tamaño: cantidad de líneas que pertenecen al vehículo Tamaño de vehículo = fin de vehículo - inicio de vehículo. •. Posición del centro del vehículo en el eje vertical con respecto al margen superior de la imagen Posición vertical = (Tamaño de vehículo/2) + inicio de vehículo. - 36 -.
(42) Propuesta de solución TECNOLÓGICO DE MONTERREY,. Posición = 47. Tamaño - 23. Posición = 231. Tamaño = 30 Figura 12. Caracterización. Se. requieren. las. características. de. los. vehículos. de. las. dos. imágenes en las que se hace el seguimiento, en este caso la imagen anterior (A) y la actual (B). De cada imagen se obtienen los siguientes arreglos de características, X toma el valor de A o B según el caso: •. autosX: guarda la cantidad de vehículos que existen en la imagen.. •. tamanoX:. guarda. el. tamaño. de. cada. vehículo. imagen. •. posiciónX: guarda la pos1c1on de cada vehículo.. - 37 -. en. la.
(43) Proyecto de ingenieria computacional TECNOLÓGICO DE MONTERREY,. Determinar el vecino de cada vehículo Como parte del algoritmo se utilizan las características del vecino por lo que hay que determinar el vecino de cada vehículo. Se define al vecino de de acuerdo a: •. El vecino de un vehículo es el siguiente en el sentido de la circulación, en este caso hacia abajo.. •. El vecino del vehículo que se encuentra mas cercano a salir de cuadro, es él mismo.. •. Si no hay vehículos en un carril, no se requiere asignar vecinos.. Algoritmo de seguimiento de vehículos El objetivo del algoritmo es asignar a cada vehículo {A) de la imagen. anterior. el. vehículo. (B). de. la. imagen. actual. cuyas. características sean las más similares, o bien determinar si ninguno de ellos le corresponde. El algoritmo mostrado en el cuadro siguiente es el llevado a cabo en el proyecto, y está adaptado según las sugerencias de Haidarian et al l8l para el caso de vecinos en un mismo carril.. - 38 -.
(44) Propuesta de solución , TECNOLÓGICO DE MONTERREY. l. Inicializar arreglos para algoritmo !. matchingA = [- l ... -1], con tantos -1 como vehículos existan en imagenA. ¡. difference = [ 00. ••• ex,. J, con tantos. ex,. como vehículos existan en imagenA. 2. Para cada vehículo vA en la imagenA { 3. Para cada vehículo vB en la imgenB. 11. 4. si posición[vAJ < posicion[vB] Asignar un puntaje: score(vA,vB) =. a[. tamano(vA) - tamano(vBJ. posición(vA) - posición(vBJ] + (1-ªJ *[ tamano(vecinoAJ tamano(vecinoBJ + posición(vecinoA) -posición(vecinoBJ ] 5. si score(vA,vBJ < difference[vA] matchingA = vB difference = score(vA,vBJ. }. - 39 -. +.
(45) '". ,?:·. Proyecto de ingeniería computacional. .. ·,>f~r,t:'."' TECNOLÓGICO '.,}J··. DE MONTERREY. Conteo de vehículos Para llevar a cabo el conteo de vehículos se utiliza el caso de cuando un vehículo sale de cuadro para momento. los. vehículos. se. separan. aprovechar que en ese. visiblemente. (esto. directamente. dependiente del ángulo, ver Anexo 2 para un diagrama del campo de visión. utilizado).. El. suceso. es. registrado. como. un. -l. en. la. matriz. matching cada vez que se termina el algoritmo de seguimiento. Se lleva un registro en una variable contador que aumenta cada que sale un vehículo. Cada minuto el contador se guarda en otra variable que es la que indica cuántos vehículos pasaron el minuto anterior.. Medición de velocidad Para. realizar. la. medición. de. velocidad,. se. requiere. que. al. configurar el software se ingrese la distancia real y el ángulo de visión mínimo y máximo del área de interés, con lo cual el programa puede decir. cuál. fue. la. distancia. recorrida. por. un. vehículo. entre. dos. imágenes según su pos1cion medida en pixeles al hacer una relación con el ángulo y por lo tanto con la distancia real. (Anexo 2) Para dar una medición representativa de la velocidad, se hace un promedio de la velocidad de un vehículo en cada carril entre la imagen anterior y la actual. Éste se guarda. y se manda la suma. como resultado, para asegurarse que es el mismo vehículo se utiliza y se guarda el valor del último elemento de la matriz matching que indica cuál vehículo es el correspondiente al último anterior y si ya salió de cuadro.. - 40 -.
(46) Resultados Consideraciones En las diferentes etapas del desarrollo se obtuvieron resultados parciales. Estos fueron obtenidos en base a las modificaciones que se llevaron a cabo al código en la etapa de desarrollo. Si los resultados obtenidos no eran satisfactorios, se. modificaban los parámetros,. el. código o el algoritmo. Medimos la satisfacción de diferentes formas para cada etapa: •. Segmentación de objetos de interés o. Actualización del fondo dinámico. En este proceso se buscó que el fondo: a). Se estabilizara funcionalmente en el menor tiempo posible. b). Se adaptara a los cambios lentos o sutiles. c). No se absorbieran las imágenes de los vehículos. d). Tardara lo menos posible en actualizarse. o. Adecuación de la imagen. En este proceso se buscó que en la imagen resultado: a). Los objetos tuvieran bordes definidos. b). Los objetos correspondieran exclusivamente a los vehículos. c). Los objetos no tuvieran huecos internos.
(47) ,',\. :~~s. Proyecto de ingeniería computacional. . • !:~~:::,,~·.t;'.< · 1. •. 1.-.,-,,f. TECNOLÓGICO DE MONTERREY. d). Un solo objeto correspondiera a un solo vehículo.. e). Y que el tiempo de procesamiento fuera el menor posible.. Seguimiento de objetos de interés o. Caracterización de los vehículos. En este proceso se buscó obtener de las características: a). Con precisión. b). Rápidamente. c). De la manera más simple. d). Mínimas. o. Seguimiento. En este proceso se buscó: a). Fiabilidad. b). Rapidez. o. Conteo. En este proceso se buscó minimizar el error de: a). Contar autos inexistentes o existentes mas de una vez. b). No contar autos existentes. - 42 -.
(48) Resultados l. o. · . TECNOLOGICO DE MONTERREY. Velocidad. En este proceso se buscó reducir el error de: a) Las. Velocidad obtenida por el software vs. estimada pruebas. fueron. realizadas. en. un. minuto. de. video. (900. imágenes) (características de la imagen ver Anexo 3), con los recursos a la mano (lista de recursos en Anexo 4).. Valores entregados Como. resultado. del. desarrollo,. pruebas. y. modificaciones,. el. proyecto entrega cada minuto el número de vehículos que circulan por la vialidad y la suma de las velocidades promedio de un vehículo de cada carril. (ver anexo 5 para observar las imágenes de cada etapa, objetivos y resultados). Tiempo de procesamiento El. tiempo. de. procesamiento. se. obtuvo. utilizando. la. función. etime() en MATLAB, y es la suma de tiempos de procesamiento de cada segmento del proceso llevado a cabo para una imagen. El procesamiento de cada imagen con un trame step de 5 dura entre 450 y 600 milisegundos y para inicializar el fondo 6.5 segundos. Estos. tiempos. se. consideran. cortos. prueba.. - 43 -. para. estar en. un. ambiente. de.
(49) Proyecto de ingeniería computacional. ·}~t,f' TECNOLÓGICO \,;'J,·, DE MONTERREY. Conteo El conteo. base de comparac1on. se. hizo observando el video. original y contando visualmente la cantidad de vehículos que salían. En el conteo vehicular hay un error de 2.5%. Se contó como error a los siguientes eventos: •. No había vehículo alguno y se contó un vehículo.. •. Había un vehículo y no se contó.. •. Se. contó. un. vehículo. dos. veces,. porque. no. se. pudo. identificar como él mismo.. Velocidad Para obtener el error de velocidad se hicieron dos estimaciones de la velocidad por vehículo para 15 vehículos en diferentes trames del video original. Se tomaron para las estimaciones los puntos en el que visualmente se observó. el inicio (cofre) y el fin. (cajuela) de cada. vehículo y se realizaron las mismas operaciones que el algoritmo con sólo dos dígitos de precisión. A estas mediciones se les considera la velocidad estimada. El. error. es. de. un. 4%. y. es. la. diferencia. estimada. entre. la. velocidad estimada y la velocidad obtenida. Se hizo un promedio de 30 comparaciones para el cálculo de este error.. - 44 -.
(50) Conclusiones y trabajo futuro Conclusiones Los resultados tienen un error que se consideró pequeño por lo que el software da información precisa para tomar una decisión. El procesamiento de las imágenes se lleva en un tiempo menor a los 600. milisegundos en promedio, lo suficiente para poder tomar esa. información en el momento para decidir la ruta que se va a tomar. Hay técnicas que no se probaron, que podrían incrementar el desempeño y reducir los errores del proyecto, al igual que muchas variantes que debido al tiempo no se tomaron en cuenta pruebas con ellas.. ni. se hicieron.
(51) Proyecto de ingeniería computacional. ··\~f1/ ', r'.f'. TECNOLOGICO DE MONTERREY. Trabajo futuro Este proyecto abre la oportunidad para que generaciones futuras sigan trabajando sobre este tema, o tengan diferentes oportunidades de desarrollar sistemas usando nuestro trabajo como base. A pesar de que nuestro proyecto es funcional en un 100%,. hay muchas cosas que. aun se pueden implementar o meJorar. Con lo que respecta a la mejora de nuestro proyecto se han considerado varias mejoras o adecuaciones al proyecto, mismas que no se hicieron por falta de tiempo. A continuación se mencionan algunas de estas mejoras: Modificar el software para tomar en cuenta la iluminación en cualquier hora del día. Esto abre una nueva gama de problemas a los que es necesario implementarles una solución, como es el cambio de iluminación, la creación de sombras y/o reflejos que con la luz del medio día solar no se presentan. Para ampliar el. rango de v1s1on de una cámara se puede dar. movimiento. Esto implica un sistema inteligente que reconozca en qué posición se encuentran los objetos que se desean analizar, ya que al tener fija la cámara esto se puede hacer de forma sencilla marcando las coordenadas que se desean analizar, como se llevó a cabo en este. proyecto,. de. otra. forma. el. programa. tiene. que reconocer o. calcular cuáles son las coordenadas a analizar. MATLAB es un software muy robusto que está mas enfocado a hacer prototipos. Es probable que utilizando un software menos robusto se puedan reducir los tiempos de procesamiento, para mejorar de una. - 46 -. •.
(52) ,:1':. Conclusiones y trabajo futuro. ;,}'\'_,,_\, }~~- TECNOLÓGICO DE MONTERREY. •l~ft·. forma considerable los tiempos en general y la respuesta del sistema. Cambiando mucho. de. mas. software portable. también e. se. puede. independiente,. hacer. una. aplicación. como. se. menciono. anteriormente se podría utilizar C o C++, e incluso Java. Este proyecto no sólo puede meJorar en fiabilidad y robustez que. también. abre. la. posibilidad. a. nuevos. proyectos.. sino. Utilizando los. resultados que se obtienen, se puede integrar con otros sistemas de toma de decisiones como en un grafo que represente las avenidas de cualquier ciudad y junto con un GPS. (que ya son comunes en el. mercado) se pueden unir ambas tecnologías para que no únicamente se trace la ruta más corta en distancia, sino que también en tráfico, reduciendo así el tiempo de desplazamiento de un lugar a otro. Se pueden llevar a cabo estudios del tránsito vehicular, ya sea para. estudios. ambientales,. planeación. de. mantenimiento. y. diversos. estudios sobre transportación y ubicación de congestiones viales.. Tecnológia:> de Monterrey, Campus Oudad de México .. Biblioteci.i - 47 -. ....... J.
(53) Proyecto <le ingeniería computacional. 1. - 48 -.
(54) Referencias bibliográficas. Artículos l. Oral,. Mustafa,. Deniz. Umut.. Centre. of. mass. model -. A. novel. approach to background modeling for segmentation of moving objects. lmage and Vision Computing, Vol. 25, pp 1365-137 6, 2007. 2. Liang. Wang,. Weiming. Hu,. Tieniu. Tan,. Recent. Developments in. Human Motion Analysis, Pattern Recognition, Vol. 36, No. 3, pp.585601, 2003. 3. He. Zhiwei,. Liu. Jilin,. Li. Peihong,. New. Method. of. Background. Update for Video-based Vehicle Detection, Washington, USA 2004. 4. Gianluca. Bailo,. Background Segmentation,. Massimo. Estimation a. Bariani,. with. Paivi. Gaussian. fast approach.. ljas,. Marco. Distribution. Universidad. Raggio,. for. lmage. de Génova,. Italia,. 2005. 5. Darren Butler, Sridha Sridharan, REAL-TIME ADAPTIVE BACKGROUND SEGMENTATION, Australia. 6. Chris Stauffer, W.E.L Grimson. Adaptive background mixture models for real-time tracking. In IEEE Conference on Computer Vision & Pattern Recognition. Colorado, USA. June 1999. IEEE. Pages 246 252. 7. ZuWhan. Kim,. Generation from. Jitendra Video. Malik, Data. High-Quality Based on. Description. USA Universidad de Berkley,. Vehicle. Vehicle. Trajectory. Detection. and.
(55) Proyecto de ingenieria computacional. .:~y¡:.? TECNOLÓGICO. '\_.}J:· DE MONTERREY. 8. Hamid. Haidarian Shahri, Galileo Namata, Saket Navlakha, Amol. Deshpande,. Nick. Roussopoulos,. A. Graph-Based. Approach. to. Vehicle Tracking inTraffic Camera Video Streams, USA Maryland. 9. Marr, David; Vaina, Lucia. "Representation and recognition of the movements. of. shapes",. Artificial. lntelligence. Lab. Publications.. Report no. AIM-597. Oct. 1980. 1O. Yoichiro lwasaki; Yuji. Kurogi, "Real-time robust vehicle. detection. through the sorne algorithm both doy and night," Wavelet Analysis and. Pattern. Recognition,. 2007.. ICWAPR. '07.. lnternational. Conference on, vol.3, no., pp. l 008-1014, 2-4 Nov. 2007 11.SamYong Kim; Se-Young Oh; JeongKwan Kong; YoungWoo Ryu; Kwangsoo Kim; Sang-Cheol Park; KyongHa Park, "Front and rear vehicle detection and tracking in the doy and night times using vision. and. sonar sensor fusion,". lntelligent Robots. and. Systems,. 2005. (IROS 2005). 2005 IEEE/RSJ lnternational Conference on, vol., no., pp. 2173-2178, 2-6 Aug. 2005 12. Liyuan Li; Weimin Huang; Irene Y. H. Gu; Qi Tian, object detection from. videos. containing. "Foreground. complex background,". Content analysis 2003. ACM lnternational Multimedia Conference on, vol., no., pp. 2-1 O, Nov. 2003. 13. Jeffrey Ploetner; Mohan M. Trivedi, "A Multimodal Approach for Dynamic. Event. Capture. of. Vehicles. SESSION:. Poster. session. 2:. human. and. Pedestrians,". appearance. and. POSTER activity. surveillance, 2006. ACM lnternational Multimedia Conference on, vol., no., pp. 203-21 O, Oct. 2006.. II.
(56) ·,·. :,. Referencias bibliográficas. ~:~i>'.'::' x,.< \. \.:~.,.. . . <(. d;'Tk '"·':'. 14. Xiaopeng detection. Ji;. Zhiqiang. technique. Wei;. for. Yewei. traffic. Feng,. surveillance. TECNOLÓGICO DE MONTERREY. "Effective systems,". vehicle. Journal. of. Visual Communication and lmage Representation Vol. 17, lssue 3, Special lssue on Real-Time lmaging, June 2006, Pages 647-658. 15. Angelica. Lozano;. Giuseppe. Manfredi;. Lucia no. Nieddu,. "An. algorithm for the recognition of levels of congestion in road traffic problems",. Mathematics. and. Computers. 1n. Simulation. Press,. Corrected Proof,. Páginas en Internet 16. Triana Tena, Jorge. Proposiciones de Ciudadanos Legisladores. Del Dip.. Jorge. Triana. Tena,. del. Grupo. Parlamentario. del. Partido. Acción Nacional, la que contiene punto de acuerdo por el que se exhorta. al. Estado. México. de. Gobierno del a. Distrito. realizar. las. Federal y al Gobierno del obras. públicas. necesarias. a. efecto de mejorar el tránsito vehicular. ( 2005)Recuperado el 8 de abril de 2008 de <http://www.senado.gob.mx/gace2.php?sesion=2005/07 / 13/1 &document o=l06> 17.Servicio de Radar Vial de la Secretaría de Transportes. y Vialidad. <http://www.setravi.df.gob.mx/radar_vial/index.html> 18. Crea. /PN. sistema. Sábado 03 de junio. de. navegación. vial. para. de 2006.. <http://www.eluniversal.eom.mx/articulos/3 l 898.html>. III. DF.. El. Universal..
(57) Proyecto de ingcnicria computacional. 19. Crea IPN sistema informático que establece rutas viales óptimas durante problemas de tráfico. Miércoles 7 de junio de 2006. <http://www.universia.net.mx/index.php/news_user/content/view/full/3809 0/> 20. Sistema de Navegación Vial en el Distrito Federal. <http://www.comunidades.ipn.mx/escom/Languages/Espa%C3%B 1ol/Upl oadFiles/Documents/96815.html> 21. Lima Sánchez,. Salvador. El Traslado. Dentro De. La Ciudad De. México En La Primera Década Del Siglo XXI. Recuperado el 8 de abril de 2008 de <http://www.sicbasa.com/tuto/ AMEC1DER2007 /Parte%207%5CSalvador%2 0Lima%20S%C3%A 1nchez.pdf> 22. Kirillov, Andrew. Motion Detection Algorithms.(1995) Recuperado el 13 de febrero de 2008 de <http://www.codeproject.com/KB/audio-video/Motion_Detection.aspx > 23. Ureña Cámara, M. A.; Ariza López, F. J. Generalización del casco urbano de la ciudad de Jaén mediante morfología matemática. Revista Internacional de Ciencias de la Tierra. Recuperado el 20 de abril de 2008 de <http://www.mappinginteractivo.com/plantilla-ante.asp?id_articulo=690>. IV.
(58) ..• · .. Referencias bibliográficas. ~;,. .\~i/ .TECNOLÓGICO. H'Ht,_1;-' DE MONTERREY ,~: ..;·,' . ,~. Libro 24. González Rafael, et.al. "Digital lmage Processing us1ng MATLAB." Prentice Hall. 2004.. V.
(59) Proyecto de ingenieria computacional. VI.
(60) Anexos Anexo 1: Mediodía Solar El mediodía solar es el momento del día en que las sombras producidas por la luz del Sol tienen su menor longitud. Este momento del. día. sucede. a. diferente. hora. cada. día. y. también. cambia. dependiendo de la Latitud y Longitud del planeta en donde se quiera observar. Para calcular el horario preciso se requiere conocer entonces la Latitud, la Longitud, la fecha del día deseado y el huso horario vigente en la zona. Se puede hacer uso de calculadoras en Internet para este propósito como: •. http://www.srrb.noaa.gov/highlights/sunrise/sunrise.html. •. http://www.solar-noon.com/. En la siguiente página se muestra un calendario para todo el año 2008 de horario de mediodía solar para una Histórico de la Ciudad de México.. zona cercana al Centro.
(61) . >-. 0W. ua::: _a:::. \.:IW '01-. ..JZ. 00. z~ u ww. 1-C. -; e: o u. ~. '5. o. E o u. ~. ·¡:. u. e: Q) o/l. .!::. "' -e 3. u. Q). >,. ....o c... 1 1242:00 2 12.4228 3 12 4256 4 12 43:24 5 124351 6 12 4418 7 1244 45 6 124511 9 12 45:37 10 12 46 02 11 12 46 26 12 12 4650 13 12 4713 14 124736 15 12 47 58 16 12 48 20 17 12 48 40 16 12 49:00 19 1249 20 1249:38 21 12 4956 22 125013 23 12 50 29 2-t 12 50 45 25 125100 26 1251 14 27 125127 28 125139 29 125151 30 12 52 02. 125221 12522'3 125236 125243 125249 125254 125258 1253:02 1253 04 1253:06 1253:07 12:5308 1253:07 1253:06 1253:04 12:53:01 12 5258 125254 125249 125243 125237 125230 125223 1252 15 125206 125157 1251 47 125136 12:5130. 125122 125111 125059 12 50 46 1250:33 12 5006 12.5005 12.495 1 n49JG 1249 21 12 49 06 12 4850 12.4834 12 4818 12 480 1 12:47:44 12:4727 124710 12.46 52 1246:34 12 4616 12.4558 12.45 40 12.45.22 12.45.04 12 44 46 12 44 28 12 44 09 1243:50 12.43:32. 12 42 56 12 4238 12:42:20 124202 12 4145 124128 12 4111 12 40 54 12 40:37 12 40 20 12 40 04 12:39:48 1239:32 123917 1239 02 12:38:47 1238:33 12:38:19 12.3805 123752 123748 12:3727 1237:15 123703 123652 12:3642 1236:32 12:36:22 12:36:13 12:3605. 123557 123549 1235 42 1235:36 1235:30 123525 123521 1235 17 123513 123510 123508 12 3506 123504 1235 04 1235 04 12:35:04 123505 123507 12.35.09 123511 12351 4 123518 123524 123527 1235:32 1235:38 123545 123552 12:35 59 123607. 12 36 23 12 36:32 12 36 42 123652 12:37 02 12 37 12 12 37.23 12 37.34 12 3745 12.37:57 12 38 09 123821 12.38.33 123845 12 38 58 12.3911 12 39 24 1239:37 12.39.50 12.40 03 124016 12.40 29 1240 42 12 4055 12 4108 12 41 21 12 4133 12 41 45 12 4157 12.4209. 12 42:21 124233 12:42 45 12 42 56 124307 1243:17 1243:27 12 43:37 12 43:46 124155 12 44 :04 12 44 :12 12 44 20 12 44 27 12 44 34 12 44 :40 1244 46 12:44 51 1244 56 12 45 DO 12 4503 12 4506 12 4508 124510 12 451 2 12 45 13 12 45 13 12:4512 12 4511 12 45 09. 12 45:04 124501 12 44 57 12 44:52 1244 47 12:44:41 12 4434 12 44 27 12 441 9 12441 1 12 44 02 124353 12 4343 12 43:32 12 43:21 12 43:09 12 42 57 12 4245 12:4232 124218 12:42:04 12 4149 12 41:34 12 4118 12 41 02 12 40 46 1240:29 12 40:12 12:3955 12:39:37. 1239 00 123841 12 38 22 123803 1237 43 123723 12.37.03 1236.43 123622 1236 01 1235 40 12351 9 12.34 58 123437 12341 6 1233:55 1233:34 1233:1 3 12.3252 123230 123208 123147 123126 123105 1230 44 123023 123002 12 29 42 122922 122902. 122843 12:2824 122805 1227 46 12 27 28 122710 122652 1226:35 122618 122602 122546 12:25 30 1225:15 12:25:01 1n 447 1224:34 122421 12 24 09 12.23:57 1223:46 1223:36 1223:26 1223:17 12:23:08 1223:01 12 22 54 12 22 47 12:22 42 12:2237 122233. 12 2228 122226 12 22 25 122225 12 22 26 12 22 28 12 22:30 122233 122237 12 22 42 12 22 48 12 22:55 12 23:02 12:23:1 1223:20 122330 1223:41 l 12 23:52 1 12:24.05 12 2418 122432 12 24 47 1 122503 \ 122520 1225:37 12 25 55 122614 1226:34 1226 54 122715. 123437 17 :::i:; 05. 1237 O 1237:35. -->.
(62) Anexos. (~,;;;.._.::~~,. '{¡\Jitc~'-~·. ~-. W. Anexo 2: Diagrama de ubicación de la cámara. C'O. l... .....:::::s. .-... E. o(l.. E e o C'O ~o M ....... o ·en. et 1. ·-= -_: .·. ---,. '._I. 11. 1. 1. 1 ~-,. lj. 'j,·'. ..:__.:..:··_.../. e. CI). .....eCI). ,. "'C. :::::s. :·,·. .,..:. : !./.:/ .' _,.. 1. -. "'C. ·->. CI). ,,. 1. 11. ',, ¡,.~L. 1. C'O. .-... E. ·L1.. CI). (l.. -.~·.::-. . e E. ~o. o en ........ · - O). ·-> CI). "'C C'O. "'C ~ o cij. a.·E > C'O ~. u. .a o en. IX. . TECNOLÓGICO DE MONTERREY,.
(63) Proyecto de ingeniería computacional TECNOLÓGICO DE MONTERREY,. Anexo 3: Características del video procesado 0. Resolución de 320 x 240 pixeles. 0. Velocidad de 15 imágenes por segundo. 0. Tipo de imagen: True Color. 0. Zona de interés delimitada a los tres carriles de mayor área en la imagen y se tomó aproximadamente ¾ partes de la altura de la imagen (de la línea 60 a la 240), para así excluir la parte superior de la imagen debido a que el tamaño de los coches es reducido y dificulta el reconocimiento de los mismos.. X.
(64) Anexos. :~.·,~..:: TECNOLÓGICO .,}/, DE MONTERREY. Anexo 4: Recursos utilizados •. Una computadora con: 0. 3GB en memoria RAM. 0. Procesador lntel Core 2 Duo T7500 a una velocidad de 2.2 GHz. 0. •. Una cámara marca Canon modelo ntsc zr 300 con:. °ໝ. •. Sistema operativo Windows Vista Business. 0. Resolución de 720x480 pixeles. 0. Velocidad de 29 frames por Segundo. 0. Total bit rote de 28912 KBps Compresión DVSD. Recursos de software 0. Windows Movie Maker 2.1 Permitió. realizar la. adquisición. del. video. de. la. camara. a. la. computadora y editar el video a tamaños manejables. 0. Virtua1Dub Es un programa para captura y procesamiento de video para. plataformas Windows de 32bits. Puede procesar rápidamente secuencias de imágenes de videos en formato AVI. Se utilizó para editar los videos. y cambiar el formato y características del archivo de tal forma que Matlab pudiera utilizarlo. XI.
(65) Proyecto de ingeniería computacional. Ulead DV Type 1 to DV Type 2 Converter. 0. Software utilizado para convertir el formato de DV del tipo I al tipo 11. Se utilizó para que el formato del video obtenido por Movie Maker fuera manejable por Virtua1Dub con el codee de DV. 0. Panasonic DV Codee Software utilizado para poder reproducir y manipular videos en. formato DV tipo 2. Lo utiliza Virtua1Dub 0. MATLAB 7.0. Es un ambiente de desarrollo de software y pruebas matemáticas. Se eligió el lenguaje de programación de MATLAB por su versatilidad, ya que puede tratar con facilidad secuencias de imágenes mediante matrices.. XII.
(66) Anexos. TECNOLÓGICO DE MONTERREY ,. Anexo 5: Póster. • TECNOLOUCO DE !\i~ONTUWEY. Objetivo:. Crear un modulo capaz de actualizar dinámicamente la ponderación de la carg.i vehicular en un grafo que modela una vialidad empleando el procesamiento de imágenes de las cámaras de video en condkiones ideale~. n modulo r~opU1~to li('nt". Un error de l.S"l>cncl c.ontro. UnerrOf'dc 4%cn 1.i est11nJcióndc la. Un ucmpodc pro...csam,c11todcb00 rns. Justificación: Hoy existen cámaras de video en las calles que junto con el análisis computaciondl necesario, pueden ayudar a determinar la mejor trayectoria para satisfacer la necesidad de transportarse en calles y avenidas.. Mon,toreodevialidades ~\ante n1m iento preve nt1vo. ótud,os eco!ógicos y:sociales Creación de rutas. XTTT.
(67)
Figure
+3
Documento similar
Cabe destacar que los resultados del Global ideal no han sido incluidos de manera explícita al poder ser inferidos extrayendo para cada dominio objetivo, el mejor resultado de los
La Normativa de evaluación del rendimiento académico de los estudiantes y de revisión de calificaciones de la Universidad de Santiago de Compostela, aprobada por el Pleno or-
Industrial concentrado Industrial disperso Agrícola-Secano Agrícola-Regadío Otros usos rurales Forestal. Infraestructuras: carreteras Infraestructuras: ferrocarriles
[r]
Para la creación de una propuesta volumétrica en la totalidad del proyecto, se tiene en cuenta como es el proceso de desarrollo de nuestras ciudades, en donde reconocemos la
ELABORACIÓN DE LOS MAPAS DE PELIGROSIDAD Y RIESGO REQUERIDOS POR EL R.D...
Cuerda flexible de cobre electrolítico aislado con una capa de fibra de vidrio y una trenza de hilado de fibra aramidica impregnada con laca siliconada.. Propiedades: Alta resistencia
Gastos derivados de la recaudación de los derechos económicos de la entidad local o de sus organis- mos autónomos cuando aquélla se efectúe por otras enti- dades locales o
