GU´
IAS DE LABORATORIO
SISTEMA DE P´
ENDULO INVERTIDO DE TRAYECTORIA CIRCULAR
IDEAS
Grupo de Investigaci´
on, Desarrollo y Aplicaciones en Se˜
nales
Universidad Distrital Francisco Jos´
e de Caldas
´
´
Indice
1. Introducci´on 1
2. Sistema de P´endulo Invertido 1
3. Caracterizaci´on del Sistema 4
3.1. Optimizaci´on de los par´ametros del sistema . . . 5
4. Controlador Difuso 6 4.1. Sistema difuso tipo 2 de intervalo . . . 6
4.2. Sistema difuso tipo 1 . . . 8
4.3. Optimizaci´on de los par´ametros del controlador . . . 8
5. Controlador por Variables de Estado 9 6. Resultados Esperados 10 6.1. Caracterizaci´on del sistema . . . 10
6.2. Controlador difuso . . . 11
6.2.1. Controlador difuso tipo 2 de intervalo . . . 11
6.2.2. Controlador difuso tipo 1 . . . 12
6.3. Controlador por realimentaci´on de estados . . . 12
6.4. Conclusi´on . . . 12
1.
Introducci´
on
En este documento se realiza una introducci´on al sistema p´endulo invertido de trayectoria circular, se modelan las ecuaciones que describen el comportamiento del mismo y de igual manera se indica c´omo realizar la caracterizaci´on de este sistema. Se propone y explica el dise˜no e implementaci´on de controladores difusos y por variables de estado, para que a partir de ello, el usuario pueda realizar su propio controlador para esta planta; y por tanto, se muestran los resultados esperados para cada uno los controladores propuestos.
Para un correcto funcionamiento del sistema se han de tener en cuenta las caracter´ısticas que se muestran en la Tabla 1.
Tabla 1:Caracter´ısticas del sistema.
Salida Fuentes Voltaje 12 V, 4.2 A
Comunicaci´on Planta-PC UART, Puerto mini USB FTDI Chip
Driver http://www.ftdichip.com/Documents/InstallGuides.htm
Variables Entrada Voltaje Motor Rango Voltaje m´aximo de entrada -12 V a 12V Variables Salida
´
Angulo p´endulo Velocidad angular carro Rango Voltaje ´Angulo -90◦a 90◦−→-9 V a 9 V
Rango Voltaje Velocidad -10 rad/s a 10 rad/seg−→-10 V a 10 V
2.
Sistema de P´
endulo Invertido
θ
l
y
f
l
mg
O
H
R
u
P
M
cos
l θ
V
m f
R
.
r
N
N
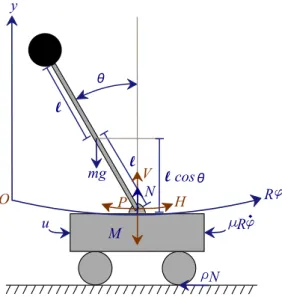
Figura 1:Sistema de p´endulo invertido de trayectoria circular.
El diagrama esquem´atico del Sistema de p´endulo invertido se muestra en la Fig. 1 y a partir del an´alisis del diagrama de cuerpo libre del sistema y teniendo en cuenta el movimiento rotacional tanto de la barra como del carro en general se determina que las ecuaciones que describen el sistema son:
¨
θ=mgl(M+m) sinθ−mlucosθ+mlρNcosθ+mlµRϕ˙cosθ−(M+m)bθ˙−m
2l2θ˙2cosθsinθ
(M+m) (I+ml2)−m2l2cos2θ , (1)
¨ ϕ=u
(
I+ml2)−ρN(I+ml2)−(I+ml2)µRϕ˙−m2l2gcosθsinθ+mlbθ˙cosθ+(I+ml2)mlθ˙2sinθ
R[(M+m) (I+ml2)−m2l2cos2θ] . (2)
dondeM es la masa del carro, mes la masa de la barra del p´endulo, θes el ´angulo medido respecto a la vertical, 2l es la longitud de la barra, ues la fuerza de control, µ coeficiente de fricci´on viscosa, ρ
coeficiente de fricci´on normal, ϕ es el desplazamiento del carro, R es el radio de la circunferencia que describe el recorrido del carro,N la fuerza normal equivalente al peso del carro,P el centro de gravedad de la barra (centro geom´etrico),Ies el momento de inercia de la barra alrededor de su centro de masa y
bes el coeficiente de fricci´on rotacional.
Por otro lado, es necesario determinar a que es equivalente la fuerza uque se ejerce sobre el carro, respecto al torque y voltaje de alimentaci´on del motor que lo mueve. Se sabe que la fuerza que se aplica al sistema causa un efecto en las llantas del carro, la cual corresponde a
u= τ
r, (3)
dondeτ es el torque que se genera en las llantas debido al motor yrel radio de la llanta.
A partir del an´alisis de un motor DC, el cual corresponde a un circuito de la forma del que se muestra en la Fig. 2, se tiene que
τ=KTIa, (4)
V =RaIa+E, (5)
E=Kiω, (6)
ω= ˙ϕ, (7)
dondeKT es la constante de torque,Iaes la corriente de armadura,V es el voltaje aplicado al motor, Ra es la resistencia de armadura, Ki es la constante de inducido, E es el voltaje inducido y ω es la
velocidad angular del motor. Si despejamosIa de (5), tenemos Ia=
V −E
Ra
. (8)
Por lo que, remplazando la expresi´on paraIaen (4), tenemos para el torque
τ=KTIa =
KTV −KTE Ra
,
y para la fuerza ejercida por el motor, reemplanado la expresi´on para el torque en (3)
u=τ
r =
KTV −KTE r Ra
.
Finalmente, reemplazando la expresi´on paraEen (6), considerandoω= ˙ϕ
u= KT
rRa
V −KTKi rRa
˙
ϕ. (9)
De esta forma, las variables de estado del sistema [5], se seleccionan as´ı:
x1=θ, (10)
x2= ˙θ, (11)
x3=ϕ, (12)
x4= ˙ϕ. (13)
Teniendo en cuenta que la entrada del sistema corresponde al voltaje V en el motor y tomando
α= (M+m),β=(I+ml2),λ= KT
rRa yσ=
KTKi
rRa , se tiene que las ecuaciones de estado del sistema, a partir de las definiciones y de (1) y (2), corresponden a
˙
x1=x2,
˙
x2=
mglαsinx1−mlλVcosx1+mlρNcosx1+mlx4cosx1(µR+σ)−αbx2−m2l2x22cosx1sinx1
αβ−m2l2cos2x1 ,
˙
x3=x4,
˙
x4=
βλV−βρN−βx4(µR+σ)−m2l2gcosx1sinx1+mlbx2cosx1+βmlx22sinx1
R(αβ−m2l2cos2x1) .
(14)
Finalmente, mediante un proceso de linealizaci´on por Jacobiano [3] se obtiene que los puntos de equilibrio del sistema corresponden a:
x0 1= 0,
x0 2= 0,
x03= 0, x04= 0, V0= 0.
(15)
Y, finalmente, se tiene que las ecuaciones que modelan el comportamiento del sistema corresponden a:
˙
z=A∗z+B∗v,
N´osete que, en general, el resultado del proceso de linealizaci´on nos genera un modelo lineal en variables de estado incrementales. Es decir, las variables de estado lineales son equivalentes al incremento que sufrir´ıan las variables de estado no lineales con respecto al punto de equilibrio. Sin embargo, dado que el punto de equilibrio es (xe, Ve) = (04,0). Por lo que, para este caso en particular, las variables lineales
incrementalesz=xyV =v y el modelo del sistema lineal puede escribirse como ˙
x=A∗x+B∗V,
y=C x. (17)
Lo anterior describe el comportamiento del p´endulo invertido en tiempo continuo, por tanto, se dicre-tiza el sistema por medio deMatLabr, a trav´es del m´etodo del retenedor de orden cero (ZOH, de sus siglas en ing´es, Zero Order Hold) con un tiempo de muestreo de 30ms.
donde:
A∗=
0 1 0 0
∂x˙2
∂x1
(x0,V0)
−αb+ 2m2l2x20cosx01sinx01
αβ−m2l2cos2x0 1
0 mlcosx
0
1(µR+σ)
αβ−m2l2cos2x0 1
0 0 0 1
∂x˙4
∂x1
(x0,V0)
mlbcosx01+ 2βmlx02sinx01
R(αβ−m2l2cos2x0 1)
0 − β(µR+σ)
R(αβ−m2l2cos2x0 1) , (18)
B∗=
0
− mlλcosx01
αβ−m2l2cos2x0 1
0
βλ
R(αβ−m2l2cos2x0 1) , (19) C= [
1 0 0 0 0 0 0 1
]
, (20)
con:
∂x˙2
∂x1
= ml
(αβ−m2l2cos2x 1)2
gα
(
αβ−m2l2−m2l2sin2x 1
) cosx1
+(λV−ρN−x4(µR+σ))(αβ+m2l2cos2x1)sinx1
+mlx2 2
(
αβ+ cos2x
1(m2l2−2αβ))+αbmlx2sin 2x1
, (21)
∂x˙4
∂x1
= ml
R(αβ−m2l2cos2x 1)2
βx
2 2
(
αβ−m2l2−m2l2sin2x 1
) cosx1
−bx2(αβ+m2l2cos2x1)sinx1+mgl(αβ+ cos2x1(m2l2−2αβ))
−βml(λV−ρN−x4(µR+σ)) sin 2x1
. (22)
3.
Caracterizaci´
on del Sistema
Para identificar y determinar los par´ametros que modelan el comportamiento del sistema, se sabe que algunos de ellos vienen previamente definidos o son medibles, como las masas, longitudes, entre otros. Para el caso del momento de inercia [13] y los coeficientes de fricci´on viscosa [14] y normal [15] se sabe que:
La inercia de la barra puede ser claculada comoIbarra= 13ml 2.
El coeficiente de fricci´on viscosa se puede calcular comoµ= ηaireAsupcarro
hcarro , donde la viscosidad del
aireηaire= 1,8×10−5 N s/m2, el ´area superficial de carroAsupcarro= 8,2×10−3m2, la altura del
carrohcarro= 0,04m.
Para las constantes de torque e inducido y la resistencia de armadura en el motor, teniendo en cuenta el voltaje en el motor Vm = 12 V, su velocidad de 200RP M, por tanto una velocidad angular ωm= 20,944rad/s y su torque stall deτs= 2Kgf−cm= 0,19612N m, a partir de [16] y [17] se sabe
que:
Ki= Vm ωm
[ V s
m ]
, (23)
KT =Ki [
N m A
]
, (24)
Ra = KTVm
τs
. (25)
Sin embargo, al aplicar una se˜nal seno a la entrada del sistema, se tienen las respuestas simulada y real que se muestran en la Fig. 3, donde se observa que el sistema simulado es inestable y no tiene un comportamiento similar al real; esto quiere decir que los par´ametros anteriormente determinados no corresponden a los par´ametros reales del sistema; por tanto se plantea y cuestiona, de qu´e manera obtener los par´ametros del sistema de p´endulo invertido, de tal forma que el sistema simulado tenga un comportamiento aproximado al sistema implementado a determinadas condiciones, teniendo en cuenta los par´ametros anteriormente calculados.
Tiempo [s]
0 2 4 6 8 10 12
Error [°]
-15 -10 -5 0 5 10
15 Error del Sistema Real
Simulado
Figura 3:Respuestas del sistema simulado y real a una entrada seno con los par´ametros iniciales.
Por tal motivo, se decide que la optimizaci´on es el proceso m´as adecuado para hallar los par´ametros del sistema, dado que a partir de condiciones iniciales y la comparaci´on de se˜nales, simulada y real, se puede minimizar el error entre estas dos y lograr obtener un comportamiento similar entre ellas, y de esta manera, obtener los par´ametros que se ajusten al sistema en cuesti´on; por ende, se procede a optimizar el sistema teniendo en cuenta el comportamiento de la planta real a una entrada seno. Cabe aclarar que en las pruebas realizadas se pudo observar que el par´ametroρno tiene influencia en el comportamiento del sistema, dado que al linealizarlo este par´ametro se cancela, raz´on por la cual este par´ametro no se tiene en cuenta.
3.1.
Optimizaci´
on de los par´
ametros del sistema
La optimizaci´on del sistema se hace off-line a trav´es deMatLabrteniendo en cuenta el error cuadr´ ati-co integral ISE, el cual viene definido por:
J = 1
Ts ∞ ∑
n=0
e2[n], (26)
dondee[n] =−x1[n] yTs= 30ms. La optimizaci´on se puede realiza por medio de la funci´onfmincon,
[parametros,fval]= fmincon(@funoptpara,parametros0,[],[],[],[],lb,ub)
dondeparametrosson los par´ametros optimizados,fvales el valor m´ınimo encontrado para el criterio ISE,@funoptparacorresponde al sistema a optimizar a partir del criterio anterior, el vectorparametros0=[0.573 35.06 9e-04 3.69e-06 0]corresponde a los valores iniciales de los par´ametros y los vectoreslb yub co-rresponden a las restricciones del sistema paralb ≤ opt ≤ ub, las cuales son:
0,001≤ KT =Ki ≤1, 0,06≤ Ra ≤5,
0,0009≤ I ≤0,01, 0≤ µ ≤0,01,
0≤ b ≤0,01,
(27)
y se definieron inicialmente todos en un rango definido entre [0, 10] para no limitar en gran medida la optimizaci´on, y poco a poco con cada resultado se fue optimizando y restringiendo m´as los par´ametros del sistema; sin embargo, las restricciones m´as acertadas (mostradas en (27)) se eligieron teniendo en cuenta el valor de estos par´ametros en otros sistemas de p´endulo invertido [18], [19], [20], [21], [22], [23], [24], [25], [26], [27].
Es importante aclarar que la caracterizaci´on puede llevarse a cabo teniendo en cuenta el comporta-miento de la planta real para un controlador difuso, el cual no requiere de dicha caracterizaci´on previa, lo cual es importante para tener un punto de comparaci´on frente a distintas entradas y diferentes com-portamientos en la planta.
Por tanto, para el conjunto de par´ametros a optimizar Ω = {KT = Ki, Ra, I, µ, b}, cuyos valores
iniciales son:
KT =Ki = 0,573, Ra = 35,057,
I = 9×10−4, µ = 3,69×10−6,
b = 0,
(28)
el problema de optimizaci´on a realizar es el siguiente:
m´ın
Ω J =
1
Ts Ts
∑
n=0
e2[n] sujeto a (17),
(28),
(27),
(29)
4.
Controlador Difuso
4.1.
Sistema difuso tipo 2 de intervalo
Se propone dise˜nar e implementar un controlador difuso tipo 2 de intervalo por medio de un Concresor de Relaciones Booleanas y a partir de la l´ogica de Kleen; por tanto, se han de tener en cuenta las caracter´ısticas de las entradas y salidas del controlador, las cuales deben componerse de dos funciones para modelar los comportamientos de cada variable, es decir, por pares de funciones, dado que al tener un sistema difuso tipo 2 de intervalo, las funciones de pertenencia deben ser tales que constituyan un intervalo o rango de pertenencia mas no un valor fijo de pertenencia como el caso de los sistemas difusos tipo 1.
Dise˜no y desarrollo de la propuesta de un sistema difuso tipo 2 de intervalo
Para el dise˜no del controlador se tienen en cuenta dos entradas y una ´unica salida; las entradas corresponden al error y derivada del error, las cuales teniendo en cuenta el sistema real, se definieron dentro de un Universo comprendido como [−15o,15o] para el error y [−300o/s,300o/s] para la derivada
del error. La ´unica salida del sistema corresponde al voltaje sobre el motor, el cual, de acuerdo a las caracter´ısticas del mismo, se define dentro del Universo [−12V,12V].
Las funciones de pertenencia se definen a criterio propio; por tanto, se definen funciones trapezoidales y gaussianas para la entrada y salida respectivamente, tal y como se observa en la Fig. 4, se toman dos funciones de pertenencia de intervalo para cada entrada y cuatro funciones de pertenencia superiores y cuatro inferiores para la salida.
Error [°]
-15 -10 -5 0 5 10 15
0 0.5
1 Funciones de Pertenencia Error
E
1
E
2
Derivada del Error [°/s]
-300 -200 -100 0 100 200 300
0 0.5
1Funciones de Pertenencia Derivada del Error
DE1 DE2
(a) Conjuntos difusos de intervalo de entrada.
Voltaje [V]
-10 -5 0 5 10
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1 Funciones de Pertenencia de Salida
VAN VBN VBP VAP
(b) Conjuntos difusos Tipo 2 de salida.
Figura 4:Funciones de pertenencia de entrada y salida del controlador.
Tabla 2:Tabla de verdad por l´ogica de Kleen. E1 E2 DE1 DE2 V AN V BN V BP V AP
0 0 0 0 0 0 0 1
u 0 0 0 0 0 0 1
1 0 0 0 0 0 u 0
1 u 0 0 0 u 0 0
1 1 0 0 1 0 0 0
0 0 u 0 0 0 0 1
u 0 u 0 0 0 u 0
1 0 u 0 0 0 u 0
1 u u 0 0 u 0 0
1 1 u 0 1 0 0 0
0 0 1 0 0 0 0 1
u 0 1 0 0 0 u 0
1 0 1 0 0 1 1 0
1 u 1 0 0 u 0 0
1 1 1 0 1 0 0 0
0 0 1 u 0 0 0 1
u 0 1 u 0 0 u 0
1 0 1 u 0 u 0 0
1 u 1 u 0 u 0 0
1 1 1 u 1 0 0 0
0 0 1 1 0 0 0 1
u 0 1 1 0 0 u 0
1 0 1 1 0 u 0 0
1 u 1 1 1 0 0 0
1 1 1 1 1 0 0 0
V AN=E1E2[1−DE1+DE2(DE1DE2)],
V BN =E1(1−E2)[E2(1−DE1)(1−DE2)(1−DE1) +DE1],
V BP =E1(1−E2)[(1−E1)DE1DE2(DE2) + (1−DE2)],
V AP = (1−E1)(1−E2)[(1−DE2)(1−DE1DE2) +DE1DE2].
(30)
Finalmente dado que se tiene un sistema difuso tipo 2, se obtienen dos funciones para el CBR una inferior y una superior, y a partir de un reductor de tipo Nie-Tan, la funci´on de salida final para el CBR es:
CBRs=V alV ANs·V AN+V alV BNs·V BN+V alV BPs·V BP+V alV APs·V AP, CBRi=V alV ANi·V AN+V alV BNi·V BN+V alV BPi·V BP+V alV APi·V AP,
CBR=CBRs+CBRi
2 ,
donde las coeficientes de orden cero del CBR (V al) corresponden a:
V alV ANs=V alV ANi=−10, V alV BNs=V alV BNi=−3, V alV BPs=V alV BPi= 3, V alV APs=V alV APi= 10,
(32)
y los anchos de las funciones de pertenencia de entrada sonCEE= 5 para el error yCDEE= 50 para la derivada del error. Un paso adicional que se puede llevar a cabo es la optimizaci´on estos par´ametros del controlador, de tal forma que este sea m´as efectivo, por tanto, se sugiere optimizar los anchos de las funciones de pertenencia de entrada y los coeficientes de orden cero del CBR.
4.2.
Sistema difuso tipo 1
Se propone dise˜nar e implementar un controlador difuso tipo 1 por medio de un Concresor de Rela-ciones Booleanas y a partir de la l´ogica de Kleen; por tanto, se han de tener en cuenta las caracter´ısticas de las entradas y salidas del controlador, las cuales pueden definirse a criterio propio.
Dise˜no y desarrollo de la propuesta de un sistema difuso tipo 1
Para el desarrollo del sistema difuso tipo 1, se toman las funciones de pertenencia de entradaE1para
el error yDE1 para la derivada del error; de igual forma para las funciones de pertenencia de salida se
tomaron ´unicamente las funciones superiores mostradas en la Fig. 4, a continuaci´on se realiza la tabla de verdad por l´ogica de Kleen (similar a la Tabla 2) y por medio de la forma normal conjuntiva se obtienen las salidas del sistema en (34):
V AN =E1DE1,
V BN = (1−E1)DE1,
V BP =E1(1−DE1),
V AP = (1−E1)(1−DE1).
(33)
Finalmente se obtiene la salida del CBR:
CBR=V alV AN·V AN+V alV BN·V BN+V alV BP ·V BP +V alV AP·V AP. (34)
donde las coeficientes de orden cero del CBR (V al) corresponden a:
V alV AN =−10, V alV BN =−3, V alV BP = 3, V alV AP = 10,
(35)
y los anchos de las funciones de pertenencia de entrada son CEE = 5 para el error y CDEE = 50 para la derivada del error. Para este controlador es importante realizar la optimizaci´on que se sugiri´o para el sistema difuso tipo 2, dado que para este controlador el sistema no se estabiliza; por tanto, se sugiere optimizar el ancho de las funciones de pertenencia de entrada y los coeficientes de orden cero del CBR.
4.3.
Optimizaci´
on de los par´
ametros del controlador
La optimizaci´on del sistema controlado se hace off-line teniendo en cuenta el error cuadr´atico integral ISE definido en (26) y de igual forma que en la Secci´on 3 a trav´es deMatLabr, por medio de la funci´on
fmincon:
[opt,fval]= fmincon(@DifusoTipo#,opt0,[],[],[],[],lb,ub)
donde optson los par´ametros optimizados, fvales el valor m´ınimo encontrado para el criterio ISE,
0≤ CEE ≤15, 0≤ CDEE ≤300,
−12≤ V alV ANs ≤ −7, −12≤ V alV ANi ≤ −7,
−7≤ V alV BNs ≤0, −7≤ V alV BNi ≤0,
0≤ V alV BPs ≤7, 0≤ V alV BPs ≤7,
7≤ V alV APs ≤12, 7≤ V alV APi ≤12,
(36)
las cuales se definieron, teniendo en cuenta los universos de las funciones en cuesti´on, y adicionalmente, para las constantes del CBR, teniendo en cuenta la respuesta del motor con respecto a cada voltaje.
Por tanto, para el conjunto de par´ametros a optimizar Ω ={CEE, CDEE, V alV ANs, V alV ANi, V alV BNs, V alV BNi, V alV BPs, V alV BPi, V alV APs, V alV APi}, el problema de optimizaci´on a
realizar es el siguiente:
m´ın
Ω J =
1
Ts Ts
∑
n=0
e2[n] sujeto a (50),
(32)−(35),
(31)−(34),
(36),
(37)
5.
Controlador por Variables de Estado
Se propone dise˜nar e implementar un controlador de ganancias K, a partir del sistema definido en (16) discretizado.
Dise˜no y desarrollo de la propuesta de un controlador de gananciasKen tiempo discreto[3]
En primer lugar se debe observar si el sistema es controlable; la matriz de controlabilidad corresponde a la que se muestra a continuaci´on:
U =[B AB A2B A3B]. (38)
Dado que el sistema es SIMO (´unica entrada m´ultiples salidas), el sistema es controlable siU UT̸= 0. Si el sistema es controlable, se inicia con el dise˜no del Vector de GananciasK, teniendo en cuenta que la nueva entrada del sistema corresponde a:
u[n] =r[n]−Kx[n], (39)
por lo que las ecuaciones de estado se convierten en:
˙
x[n] = (A−BK)x[n] +Br[n]. (40) Ahora, el proceso que se lleva a cabo para determinar el vector de ganancias de tama˜no (1×4), para el caso, es el siguiente:
1. Definir el polinomio deseado que corresponde a los valores propios o eigenvaloresλi = 4 o polos:
∆(z) = (z−λ1)(z−λ2)(z−λ3)(z−λ4) =z4+a1z3+a2z2+a3z+a4. (41)
2. Determinar el polinomio caracter´ıstico de la matrizA:
∆(z) =|zI−A|=z4+a1z3+a2z2+a3z+a4. (42)
3. Encontrar el vector de ganancias de realimentaci´on:
K′ =[a1−a1 a2−a2 a3−a3 a4−a4
]
4. Se realiza la transformaci´on equivalente:
S=P−1=U
a3 a2 a1 1
a2 a1 1 0
a1 1 0 0
1 0 0 0
. (44)
5. Finalmente, se determina el vector de ganancias de realimentaci´on de estados:
K=K′P =K′S−1. (45)
Los polos deseados se pueden seleccionar a criterio propio, a partir de las siguientes ecuaciones y seleccionando inicialmente, los par´ametros adecuados para que el sistema controlado tenga el comporta-miento deseado, es decir, un tiempo de establecicomporta-miento, sobre paso m´aximo, factor de amortiguamiento, frecuencia de oscilaci´on, entre otros. Para el caso de polos discretos se seleccionan teniendo en cuenta:
ξ= √ ln|Mp/100 %|
π2+ (ln|M
p/100 %|)2
, (46)
ts(2 %) =
4
ξωn
, 0< ξ <0,69. (47)
Y finalmente que los polos corresponden a:
λ=e−ξωnTs±j2πω
nTs √
1−ξ2. (48)
6.
Resultados Esperados
6.1.
Caracterizaci´
on del sistema
Finalmente despu´es de una laboriosa b´usqueda de estos par´ametros se obtienen las respuestas simulada y real que se muestran en la Fig. 5, para:
parametros = [0,0167 0,7842 0,0019 0,0001 0,0443]. (49)
Tiempo [s]
0 2 4 6 8 10 12
Error [°]
-15 -10 -5 0 5 10
15 Error del Sistema Real Simulado
Figura 5:Respuestas del sistema simulado y real a una entrada seno con los par´ametros optimizados en (49).
x1[n+ 1] = 1,0059x1[n] + 0,0234x2[n] + 0,000013x4[n]−0,0008u[n],
x2[n+ 1] = 0,3638x1[n] + 0,5968x2[n] + 0,0008x4[n]−0,048u[n],
x3[n+ 1] =−0,0002x1[n] + 0,0002x2[n] +x3[n] + 0,03x4[n] + 0,0026u[n],
x4[n+ 1] =−0,0111x1[n] + 0,0121x2[n] + 0,9971x4[n] + 0,1761u[n],
y1[n] =x1[n],
y2[n] =x4[n].
(50)
Tabla 3:Par´ametros del sistema de p´endulo invertido implementado.
S´ımbolo T´ermino Valor Inicial Valor Optimizado Unidad SI
2l Longitud del P´endulo 0,3 m
m Masa del P´endulo 0,03 Kg
M Masa del Carro 0,59 Kg
R Radio de la trayectoria circular del carro 0,22 m
r Radio llanta 0,027 m
g Gravedad 9,8 m/s2
I Momento de Inercia 9×10−4 0,0019 Kgm2 µ Coeficiente de Fricci´on Viscosa 3,69×10−6 0,0001 N s/m ρ Coeficiente de Fricci´on Normal 0,121379
b Coeficiente de Fricci´on angular del P´endulo 0 0,03 N ms KT Constante de Torque 0,573 0,0167 N m/A
Ki Constante Inducido 0.573 0,0167 V s/rad
Ra Resistencia de Armadura 35,057 0,7842 Ω
6.2.
Controlador difuso
6.2.1. Controlador difuso tipo 2 de intervalo
En la Fig. 8 (a), se pueden observar los comportamientos tanto para el sistema controlado simulado como el implementado, por medio del controlador difuso tipo 2 de intervalo propuesto en la Secci´on 4.1 y de igual forma en la Fig. 8 (b), sin embargo, en este caso se realiz´o la optimizaci´on de los par´ametros sugeridos en dicha secci´on y se obtiene una respuesta m´as r´apida y efectiva en el sistema controlado, con los par´ametros:
CEE= 4,8255, CDEE= 162,8273, V alV ANs=−9,0708, V alV ANi=−9,0228, V alV BNs=−3,6146, V alV BNi=−2,6273, V alV BPs= 4,7316, V alV BPi= 3,4572, V alV APs= 8,999, V alV APi= 8,9777.
(51)
Tiempo [s]
0 5 10 15 20 25 30
Error [°]
-15 -10 -5 0 5 10 15
Error del Sistema
Simulado Real
(a) Sistema inicial.
Tiempo [s]
0 5 10 15 20 25 30
Error [°]
-15 -10 -5 0 5 10 15
Error del Sistema
Simulado Real
(b) Sistema optimizado en (51).
6.2.2. Controlador difuso tipo 1
En la Fig. 7, se pueden observar los comportamientos tanto para el sistema controlado simulado como el implementado, por medio del controlador difuso tipo 1 optimizado a partir del propuesto en la Secci´on 4.2, con los par´ametros:
CEE= 3,8853, CDEE = 258,3485, V alV AN =−9,1855, V alV BN =−0,0216, V alV BP = 0,0056, V alV AP = 9,3574.
(52)
Tiempo [s]
0 5 10 15 20 25 30
Error [°]
-15 -10 -5 0 5 10
15 Error del Sistema
Simulado Real
Figura 7:Respuestas del sistema controlado simulado y real, con un controlador difuso tipo 1 optimizado en (52).
6.3.
Controlador por realimentaci´
on de estados
Para el controlador de ganancias K, los polos se determinan teniendo encuenta que el tiempo de muestreoTs= 30ms, seleccionando a criterio el tiempo de establecimiento comots= 300msy el sobre
paso m´aximo Mp = 20 %, por tanto, a partir de (46) y (47) se tiene que ωn = 29,24 y de (48) que los
polos deseados son:
λ1,2= 0,67±j0,7807,
λ3,4= 1,
(53) finalmente, se determina que el vector de ganancias corresponde a:
K= [−83,2051 −4,119 0 −0,0167]. (54) En la Fig. 8, se pueden observar los comportamientos tanto para el sistema controlado simulado como implementado, por medio del controlador por realimentaci´on de estados, propuesto en la Secci´on 5.
6.4.
Conclusi´
on
Tiempo [s]
0 5 10 15 20 25 30
X1
[°]
-15 -10 -5 0 5 10
15 Posición Péndulo
Simulado Real
(a) Posici´on P´endulo.
Tiempo [s]
0 5 10 15 20 25 30
X4
[rad/s]
-6 -4 -2 0 2 4
6 Velocidad Carro
Simulado Real
(b) Velocidad Carro.
Figura 8:Respuestas del sistema controlado simulado y real, con un controlador por realimentaci´on de estados mostrado en (54).
Tabla 4:Valor del criterio ISE para cada controlador.
Controlador Sistema ISE Difuso Sin Simulado 64.7709 Tipo-2 Optimizaci´on Real 171.72 Difuso Optimizado Simulado 62.9624 Tipo-2 con (51) Reaal 67.86 Difuso Sin Simulado 4692.1 Tipo-1 Optimizaci´on Real 4444.9 Difuso Optimizado Simulado 134.1448 Tipo-1 con (52) Real 102.12 De Ganancias ConK Simulado 59.5073
K (54) Real 59.34
Tiempo [s]
0 5 10 15 20 25 30
Error [°]
-15 -10 -5 0 5 10 15
Error Sistema Simulado
CBR Tipo-2 CBR Optimizado Tipo-2 CBR Optimizado Tipo-1 Vector K
Tiempo [s]
0 5 10 15 20 25 30
Error [°]
-15 -10 -5 0 5 10
15 Error Sistema Real
CBR Tipo-2 CBR Optimizado Tipo-2 CBR Optimizado Tipo-1 Vector K
NOTA
A la hora de simular el sistema es importante tener en cuenta:
El sistema simulado entrega el valor de la posici´on del p´endulo en radianes, por lo que si se desea comparar con el real, es necesario convertirlo a grados.
El ruido presente en el sistema real, puede ser ruido gaussiano o aleatorio de 2o.
Las saturaciones y limitantes presentes en el sistema real, tales como: 1. Rango ´angulo: [−12o, 12o].
2. Rango velocidad carro: [−6rad/s, 6 rad/s]. 3. Rango voltaje: [−10V, 10V].
Zona muerta del motor ([−2 V, 2V]) y ajuste de esta zona.
A tener en cuenta: Los archivos correspondientes a las simulaciones e implementaciones de la
planta y sus controladores a trav´es de MatLabr se encuentra en el CD-ROM adjunto, cuyos archivos correspondientes son:
((funoptpara)): Sistema de p´endulo invertido lazo abierto, para caracterizaci´on con entrada seno.
((funoptspi)): Sistema de p´endulo invertido controlado con un difuso tipo 2, para caracterizaci´on.
((DifusoTipo1)): Sistema de p´endulo invertido controlado con un difuso tipo 1, Simulaci´on.
((DifusoTipo1Serial)): Sistema de p´endulo invertido controlado con un difuso tipo 1, Implementaci´on.
((DifusoTipo2)): Sistema de p´endulo invertido controlado con un difuso tipo 2, Simulaci´on.
((DifusoTipo2Serial)): Sistema de p´endulo invertido controlado con un difuso tipo 2, Implementaci´on.
((ControlK)): Sistema de p´endulo invertido controlado con un vector de ganancias K, Simulaci´on.
((ControlKSerial)): Sistema de p´endulo invertido controlado con un con un vector de ganancias K,
Implementaci´on.
((S#)): Pruebas del sistema real para realizar las respectivas comparaciones para la caracterizaci´on del sistema con entradas seno.
((C#)): Pruebas del sistema real para realizar las respectivas comparaciones para la caracterizaci´on del sistema controlado con un difuso tipo 2.
Referencias
[1] ´Angela Paola Duquino S´anchez,Dise˜no e Implementaci´on de un Sistema de P´endulo Invertido para
la ense˜nanza de conceptos de control en ingenier´ıa, a trav´es del m´etodo de Variables de Estado.
Uni-versidad Distrital Francisco Jos´e de Caldas, Facultad de Ingenier´ıa, Proyecto Curricular de Ingenier´ıa Electr´onica. Bogot´a, 2015.
[2] ´Angela P. Duquino S., Christian F. Rojas V., Jos´e J. Soriano M. and Diana M. Ovalle M., Design
and Implementation of a CBR Interval Type-2 Fuzzy Controller for Stabilizing an Inverted Pendulum.
2nd Workshop on Engineering Applications - International Congress on Engineering (WEA - 2015). [3] K. Ogata,Ingenier´ıa de Control Moderna. Prentice Hall. 1998.
[4] K. Ogata,Discrete Time Control Systems. Prentice Hall. Tercera Edici´on, 1995. [5] B. Kuo,Sistemas de Control Autom´atico. Prentice Hall. 1996.
[6] C. Phillips and H. Nagle,Digital Control System Analysis and Design. Prentice Hall. 1995. [7] Chen,Analog and Digital Control System Design. Saunders College Publishing.
[8] Masao Mukaidono, Yeung Yam and Vladik Kreinovich,Intervals is All We Need: An Argument. [9] Mai Gehrke, Carol L. Walker and Elber A. Walker,Normal forms and truth tables for fuzzy logic, 17
July 2002.
[10] Jerry M. Mendel, Uncertain. Rule-Based Fuzzy Logic Systems. Introducction and new directions, 1rd ed. USA: Los Angeles, CA, 2011.
[11] Juli´an Barreiro G´omez y Miguel Eduardo Hern´andez Figueredo, Dise˜no y estudio comparativo del
desempe˜no de controladores difusos con y sin simplificaci´on de f´ormulas a partir de la aplicaci´on de
un p´endulo invertido. Colombia: Bogot´a, 2011.
[12] Espitia, H.E., Chamorro, H.R. y Soriano, J.J., Fuzzy controller design using concretion based on
boolean relations (CBR), Computational Intelligence (UKCI), 2012 12th UK, Workshop on.
[13] HyperPhysics, Momento de Inercia: Varilla [online]. Atlanta, Georgia: Carl R. Nave, Departa-ment of Physics and Astronomy, Georgia State University. Disponible en: http://hyperphysics.phy-astr.gsu.edu/hbasees/mi2.html#irod
[14] Walter D´ıaz, Fluidos Viscosos [online]. Argentina: Universidad Nacional de Tucum´an. Disponible en: http://www.docencia.unt.edu.ar/bioquimicafisica/Teorias/6 %20- %20Viscosidad.pdf
[15] Laplace,Fuerzas de Rozamiento (GIE) [online]. Espa˜na: Departamento de F´ısica Aplicada III, Uni-versidad de Sevilla. Disponible en: http://laplace.us.es/wiki/index.php/Fuerzas de rozamiento (GIE) [16] Marvin or Bonnie Stone, DC Motors [online]. Estados Unidos: Shielded Pair. Disponible en:
http://shieldedpair.net/BAE5413/DC %20Motors.pdf
[17] Manuel Guillermo Quijano Ortega y Carlos Gerardo Hern´andez Capacho,Obtenci´on de los par´
ame-tros del motor que se utilizar´a en el sistema de locomoci´on de una esfera rodante, Universidad Pontificia
Bolivariana, Escuela de Ingenier´ıa y Administraci´on, Facultad de Ingenier´ıa Electr´onica, 2009. [18] Ali Poorhossein and Ali Vahidian-Kamyad, Design and implementation of Sugeno controller for
Inverted Pendulum on a Cart system, Ferdowsi University of Mashhad, Engineering and mathematical
school, September 2010.
[19] Duckgee Park, Dongkyoung Chwa and Suk-Kyo HongAn Estimation and Compensation of the
Fric-tion in an Inverted Pendulum, Department of Electrical and Computer Engineering, Ajou University.
Korea, October 2006.
[20] Abdelkader Merakeb, Farida Achemine and Fr´ed´eric Messine, Optimal Time Control to Swing-Up
the Inverted Pendulum-Cart in Open-Loop Form, D´epartement de Math´ematiques, Universit´e Mouloud.
France, 2013.
[21] Arindam Chakraborty and Jayati Dey,Real-time Study of Robustness Aspects of Periodic Controller
[22] Oscar Danilo Montoya Giraldo Juan Guillermo Valenzuela Hern´andez y Didier Giraldo Buitrago,
Balanceo y Estabilizaci´on del P´endulo Invertido Empleando Redes Neuronales Artificiales y un
Regu-lador Lineal ´Optimo con Criterio Cuadr´atico (LQR), Ingenier´ıa el´ectrica, Universidad Tecnol´ogica de
Pereira. Pereira, Colombia, Abril 2015.
[23] Tinoco Romero R.F. y Orc´es Pareja E.H., Modelado, simulaci´on y control de un p´endulo invertido
usando componentes an´alogos simples, Facultad de Ingenier´ıa Mec´anica, Escuela Superior Polit´ecnica
del Litoral. Guayaquil, Ecuador, Octubre, 2007.
[24] Lyda Vanessa Herrera Sep´ulveda y Uriel Alberto Melo Pinz´on, Control en espacio de estados para
un prototipo real de p´endulo invertido, Universidad Industrial de Santander, Facultad de Ingenier´ıas
F´ısico-Mec´anicas, Escuela de Ingenier´ıas El´ectrica, Electr´onica y de Telecomunicaciones. Bucaramanga, Colombia, 2013.
[25] Carlos Andres Osorio Z´u˜niga, Dise˜no, construcci´on y control de un p´endulo invertido rotacional
utilizando t´ecnicas lineales y no lineales, Universidad Nacional de Colombia, Facultad de Ingenier´ıa,
Maestr´ıa en Ingenier´ıa, Automatizaci´on Industrial. Bogot´a, Colombia, 2009.
[26] Nenad Muskinja and Boris Tovornik,Swinging Up and Stabilization of a Real Inverted Pendulum, Faculty of Electrical Engineering and Computer Science, University of Maribor. Maribor, Slovenia, January, 2006.
[27] Oscar Oswaldo Rodr´ıguez y Helvert Eduardo Cely,Dise˜no e implementaci´on de un p´endulo invertio
sobre un carro aplicando estrategias de control basado en LMI, Universidad Pedag´ogica y Tecnol´ogica