Diseño de un sistema de control distribuido con control PID difuso para control de nivel de aguas para una planta de distribución de servicios de Agua Potable
94
0
0
Texto completo
(2) RESUMEN. Las empresas prestadoras de servicios de agua son empresas que se encargan de distribuir el agua a toda la ciudad mediante sus reservorios situados en diferentes puntos. Para esta tarea se necesita controlar y mantener el caudal de agua a través de varios reservorios distribuidos en toda la ciudad por un sistema de control automatizado distribuido e interconectado por radioenlaces hacia una central que monitoree y controle en tiempo real su adecuada distribución. En la presente tesis se plantea un control de nivel, de caudal en reservorios usando lógica difusa considerando minimizar el golpe de ariete y que será implementado en un PLC maestro que controle a su vez a otros PLC esclavos de la red de reservorios.. Palabras claves: Lógica difusa, SCADA, Control de nivel, Automatización con PLC, Sistema distribuido.. 2.
(3) ABSTRACT The companies that provide water services are companies that distribute water throughout the city through its reservoirs located at different points. For this task it is necessary to control and maintain the water flow through several reservoirs distributed throughout the city by an automated control system distributed and interconnected by radio links to a central that monitors and controls in real time its adequate distribution. In this thesis it is proposed a level control, reservoir flow using fuzzy logic considering minimizing the water hammer and that will be implemented in a master PLC that in turn controls to other PLC slaves of the reservoir network.. Keywords: Fuzzy logic, SCADA, Level control, Automation with PLC, Distributed system. 3.
(4) DEDICATORIA A mis padres que siempre han sido el motor de mi vida, con su apoyo y amor incondicional me enseñaron que a pesar de los problemas y dificultades siempre hay una luz para ser cada vez mejor persona y profesional.. 4.
(5) ÍNDICE GENERAL RESUMEN .......................................................................................................................................... 2 TABLA DE ILUSTRACIONES.............................................................................................................. 8 ÍNDICE DE TABLAS ............................................................................................................................ 9 INTRODUCCIÓN ............................................................................................................................... 10 1.. 2.. PLANTEAMIENTO DEL PROBLEMA ......................................................................................... 10 1.1.. OBJETIVO GENERAL ......................................................................................................... 11. 1.2.. OBJETIVOS ESPECÍFICOS................................................................................................ 12. 1.3.. ALCANCES ......................................................................................................................... 12. 1.4.. LIMITACIONES ................................................................................................................... 13. 1.5.. JUSTIFICACIÓN DEL ESTUDIO ......................................................................................... 13. MARCO TEÓRICO ..................................................................................................................... 13 2.1.. CONTROL DE LÓGICA DIFUSA ......................................................................................... 13. 2.2.. CONTROL PID .................................................................................................................... 14. 2.2.1.. ACCIÓN PROPORCIONAL .......................................................................................... 15. 2.2.2.. ACCIÓN INTEGRAL..................................................................................................... 15. 2.2.3.. ACCIÓN DERIVATIVA ................................................................................................. 15. 2.3.. 2.3.1.. SCADA WORLDVIEW .................................................................................................. 16. 2.3.2.. CUMPLIMIENTO DE ESTÁNDARES DE SISTEMAS ABIERTOS................................ 18. 2.3.3.. CARACTERÍSTICAS BÁSICAS DEL SOFTWARE SCADA SURVALENT.................... 18. 2.3.4.. INTERFAZ GRÁFICA WORLDVIEW ............................................................................ 19. 2.3.5.. APLICACIONES AVANZADAS..................................................................................... 19. 2.3.6.. PROTOCOLOS DE COMUNICACIÓN ......................................................................... 20. 2.4. 3.. SCADA ................................................................................................................................ 16. AUTOMATIZACIÓN DE PROCESOS CON PLC ............................................................. 20. INGENIERÍA DE DETALLE ........................................................................................................ 21 3.1.. TRATAMIENTO ................................................................................................................... 23. 3.1.1.. REJA. .............................................................................................................................. 23. 3.1.2.. DESARENADOR. ............................................................................................................ 23. 3.1.3.. FLOCULADORES. ........................................................................................................... 23. 3.1.4.. DECANTADORES Y FILTROS. ....................................................................................... 23. 3.1.5.. FILTROS.......................................................................................................................... 23 5.
(6) 3.1.6.. DISPOSITIVO DE DESINFECCIÓN. ............................................................................... 23. 3.2.. ALMACENAMIENTO DE AGUA TRATADA......................................................................... 24. 3.3.. RED DE CONDUCCIÓN DE DISTRIBUCIÓN ..................................................................... 24. 3.4.. ARQUITECTURA DE RED .................................................................................................. 26. 3.5.. EQUIPAMIENTO E INSTRUMENTACIÓN PARA RADIOENLACE .................................. 28. 3.5.1.. DESCRIPCIÓN DE EQUIPOS ......................................................................................... 28. 3.5.1.1.. AIRMAX POWERBEAM M5-400 ANTENA 25 DBI, 5GHZ, 802.11A/N, DUAL-POL...... 28. 3.5.1.1.1.. MEJORA DE INMUNIDAD AL RUIDO ...................................................................... 29. 3.5.1.1.2.. DISEÑO PLATO REFLECTOR ................................................................................. 29. 3.5.1.1.3.. TECNOLOGÍA AIRMAX INCLUIDA .......................................................................... 29. 3.5.1.1.4.. CONFIGURACIÓN SERVIDOR-CLIENTE ................................................................ 30. 3.5.1.2.. PLC SIEMENS S7-1200 CPU 1214 .............................................................................. 30. 3.5.1.3.. ALCANCES DE RADIOENLACE .................................................................................. 31. 3.5.1.4.. UBICACIÓN ................................................................................................................. 32. 3.5.1.5.. ESQUEMA DE RADIOENLACE ................................................................................... 33. 3.5.2.. DESCRIPCIÓN DE INSTRUMENTOS A UTILIZAR ......................................................... 34. 3.5.2.1.. SENSORES Y TRANSMISORES DE SEÑAL .............................................................. 34. 3.5.2.2.. SENSOR TRANSMISOR DE PRESIÓN SITRANSP200. ............................................. 35. 3.5.2.2.1.. SITRANS P200/P210/P220 ...................................................................................... 35. 3.5.2.2.1.1. DETALLES ............................................................................................................ 36 3.5.2.2.1.2. VENTAJAS............................................................................................................ 36 3.5.2.3.. VÁLVULAS DE CONTROL........................................................................................... 36. 3.5.2.3.1.. 4.. VÁLVULA DE RETENCIÓN DFT........................................................................... 37. 3.5.2.4.. FLUJOMETRO SITRANS F M MAG 5100 W ................................................................ 38. 3.5.2.5.. SENSOR DE INUNDACIÓN WINLAND WATERBUG WB-200..................................... 40. CONTROL AUTOMÁTICO ......................................................................................................... 42 4.1.. DISEÑO DE CONTROLADORES DIFUSOS ....................................................................... 42. 4.1.1.. FUSIFICADO................................................................................................................ 43. 4.1.2.. BASE DE CONOCIMIENTO ......................................................................................... 44. 4.1.3.. TOMA DE DECISIONES .............................................................................................. 44. 4.1.4.. DEFUSIFICADO ........................................................................................................... 48. 4.2.. SOFTWARE DE DESARROLLO TIA PORTAL.................................................................... 49. 4.2.1.. VENTAJAS ................................................................................................................... 49 6.
(7) 4.2.2.. SISTEMA DE INGENIERÍA .......................................................................................... 50. 4.3.. REGLAS DE INFERENCIA ................................................................................................. 50. 4.4.. CONTROL DE NIVEL .......................................................................................................... 51. 4.5.. CONTROL DE GOLPE DE ARIETE .................................................................................... 52. 4.6.. MÉTODO EMPLEADO EN LA MODELACIÓN .................................................................... 54. 4.7.. ANALISIS DEL SISTEMA A CONTROLAR ......................................................................... 54. 4.7.1.. CALCULO DE TIEMPO DE CERRADO DE VÁLVULA DE ENTRADA DE AGUA ........ 56. 4.7.2.. ECUACIONES GENERALES DEL MOVIMIENTO EN UNA TUBERÍA CIRCULAR ...... 60. 4.7.3.. CIERRE LENTO DE LA VÁLVULA: .............................................................................. 65. 4.8.. 5.. PROGRAMACIÓN............................................................................................................... 67. 4.8.1.. PSEUDOCÓDIGO PARA CONTROLADOR TAGAKI SUGENO ................................... 67. 4.8.2.. FUSIFICACIÓN PARA NIVEL RESERVORIO .............................................................. 69. 4.8.3.. PROGRAMACION LADDER ........................................................................................ 71. 4.8.3.1.. ALARMAS DE INTRUISMO ...................................................................................... 71. 4.8.3.2.. COMUNICACIÓN MODBUS ..................................................................................... 72. 4.8.3.3.. LECTURA DE SEÑAL Y ESCALAMIENTO ............................................................... 72. 4.8.3.4.. ADQUISICIÓN DE DATOS ....................................................................................... 73. 4.8.3.5.. ORDENES DE CIERRE DE VÁLVULA ..................................................................... 73. 4.8.3.6.. COMUNICACIÓN CON SERVIDORES DE PLC ESCLAVO ..................................... 74. FINANCIAMIENTO ..................................................................................................................... 74 5.1.. COSTO DE IMPLEMENTACIÓN ......................................................................................... 74. 6.. CONCLUSIONES ....................................................................................................................... 75. 7.. RECOMENDACIONES............................................................................................................... 77. 8.. GLOSARIO................................................................................................................................. 77. 9.. BIBLIOGRAFÍA........................................................................................................................... 80. 10.. ANEXOS ................................................................................................................................. 81 CREACIÓN DE UN PROYECTO ................................................................................................ 82 AGREGAR UN DISPOSITIVO PLC A UN PROYECTO .............................................................. 83 DEFINIR VARIABLES EN EL PLC ............................................................................................. 87 CREAR UN PROGRAMA ........................................................................................................... 89. 7.
(8) TABLA DE ILUSTRACIONES. Figura 1 Grafica de Función de Pertenencia ...................................................................................... 14 Figura 2 Mapa ................................................................................................................................... 21 Figura 3 (Embalse -----------------> Bocatomas) ............................................................................... 22 Figura 4 Tanque de tratamiento de agua ........................................................................................... 24 Figura 5 Diagrama unifilar de tanques de distribución ....................................................................... 25 Figura 6 Diagrama unifilar de línea de conducción ............................................................................ 25 Figura 7 Detalle de tuberías en un reservorio .................................................................................... 26 Figura 8 Arquitectura del sistema ...................................................................................................... 27 Figura 9 Detalle de Comunicación entre PLCs Maestro Esclavo ...................................................... 27 Figura 10 Antena de Radioenlace...................................................................................................... 30 Figura 11 PLC S7-1200 ..................................................................................................................... 31 Figura 12 Vista Satelital ..................................................................................................................... 32 Figura 13 Vista Perfil ......................................................................................................................... 33 Figura 14 Esquema de Radioenlace .................................................................................................. 33 Figura 15 Sensor de Presión ............................................................................................................. 36 Figura 16 Válvula de Retención ......................................................................................................... 37 Figura 17 Caudalímetro ..................................................................................................................... 38 Figura 18 Caudalimetros SITRANS ................................................................................................... 40 Figura 19 Sensor de Inundación ........................................................................................................ 41 Figura 20 Bloque Difusor ................................................................................................................... 43 Figura 21 Definición de variables ....................................................................................................... 44 Figura 22 Grafica de Posible activación de reglas ............................................................................. 46 Figura 23 Definición de Salida ........................................................................................................... 48 Figura 24 Diseño Tuberías en SCADA WorldView ............................................................................ 50 Figura 25 Reservorio con Instrumentos ............................................................................................. 54 Figura 26 Reservorio con PID ............................................................................................................ 55 Figura 27 Reservorio con Lógica Difusa ............................................................................................ 55 Figura 28 Funciones de Pertenencia ................................................................................................. 68 Figura 29 Diagrama de Logica Difusa ................................................................................................ 69 Figura 30 Programación STL ............................................................................................................. 71 Figura 31 Alarmas de Intruismo ......................................................................................................... 71 Figura 32 Comunicación Modbus ...................................................................................................... 72 Figura 33 Lectura de Señal y Escalamiento ....................................................................................... 72 Figura 34 Adquisición de Datos ......................................................................................................... 73 Figura 35 Ordenes de Cierre de Válvula ............................................................................................ 73 Figura 36 Comunicación de Servidores ............................................................................................. 74 Figura 37 Nivel de Reservorio R 11 ................................................................................................... 76 Figura 38 Salida de Consumo de Reservorio R11 ............................................................................. 76. 8.
(9) ÍNDICE DE TABLAS Tabla 1 Equipos de Radioenlace ....................................................................................................... 28 Tabla 2 Tabla de Ip de Radioenlace .................................................................................................. 30 Tabla 3 Escalamiento de Sensor de Presión a Nivel de Agua ........................................................... 33 Tabla 4 Detalles Sensor de Presión ................................................................................................... 36 Tabla 5 Detalles Sensor de Caudalímetro ......................................................................................... 39 Tabla 6 FAM (Fuzzy Asociate Memory) de 3 particiones ................................................................... 47 Tabla 7 Condiciones de Nível ............................................................................................................ 67 Tabla 8. Cotización de equipos .......................................................................................................... 74. 9.
(10) INTRODUCCIÓN. Debido a la necesidad constante de innovación e implementación de equipos para la modernización de procesos, es importante tener una base sólida de conocimientos acerca del proceso a automatizar y los requerimientos del mismo. En la etapa de PLANTEAMIENTO DEL PROBLEMA nos centramos a la explicación de la realización del proyecto con miras a generar la automatización. En la etapa de MARCO TEÓRICO se analiza la teoría de un controlador difuso. En la etapa de INGENIERÍA DE DETALLE se analiza los requerimientos, instrumentos y equipos así como las reglas de inferencia que el control difuso requiere y que debe poseer el sistema para poder generar un control y automatización necesarios para su correcto funcionamiento. En la etapa de CONTROL AUTOMÁTICO se analiza el detalle del control tipo Fuzzy Logic y a la vez el análisis las reglas de inferencia a programar así como el software a usar. Finalmente, en la etapa 7 y 8 daremos las conclusiones y recomendaciones para el correcto funcionamiento del sistema.. 1. PLANTEAMIENTO DEL PROBLEMA. En ciertas épocas del año las reconocidas plantas industriales agendan los programas de visitas técnicas a nivel nacional de acuerdo a sus políticas y/o convenios, dirigido a clientes, estudiantes de pregrado, post grado y público en general a fin de orientar en aspectos de cómo es la organización, la productividad, la calidad de sus servicios, el orden, la logística, el equipamiento, el uso de sus equipos, la tecnología vigente, el control de toda su red, etc. Principalmente las plantas prestadoras de servicios de saneamiento son las que de forma continua, están en busca del mejoramiento de sus redes, equipos de control e infraestructura con la finalidad de. brindar servicios de calidad para el consumo de la. población.. 10.
(11) Mediante la oportunidad de recorrer la planta industrial de saneamiento EPS Moquegua durante una visita técnica se observaron las instalaciones, e identificaron equipos y procesos, que teóricamente se estudian en la carrera de ingeniería por lo que las apreciaciones sobre esta visita permiten conocer y mejorar futuras experiencias, antes de culminar el guía pregunta a los participantes acerca de lo que más les ha llamado la atención de los procesos y su opinión sobre la utilidad de la visita.. En tal sentido lo relevante es, por qué, se generan los cortes de servicios de agua, como aplican el control en toda la red, que es lo que daña frecuentemente la infraestructura, en donde surge la explicación de efectuar un correcto control del caudal, nivel de agua y golpe de ariete. Asimismo se deben considerar los avances tecnológicos en estos últimos años que permiten tener al alcance técnico y económico dispositivos y equipos de última generación. Por tanto las empresas ven en esta situación la necesidad de elevar la productividad o reducir costes de mantenimiento en sus Plantas, entre otras posibilidades, mediante la modernización total o parcial de sus plantas.. El control de nivel y caudal de agua de manera autónomo en plantas de distribución de agua potable en el Perú es poco usado ya que los PLC en su mayoría cuentan con bloques de control tipo PID y en algunos casos con bloques de lógica difusa muy poco flexibles, por lo que su uso se hace muy complicado.. 1.1.. OBJETIVO GENERAL. Diseñar un sistema de control distribuido con capacidad de control difuso para optimizar el control de nivel de aguas en la planta de distribución de servicios de agua potable EPS Moquegua.. 11.
(12) 1.2.. OBJETIVOS ESPECÍFICOS. -. Analizar el entorno interno y externo del sistema de control actual en planta.. -. Analizar el funcionamiento y control de los reservorios de manera individual e identificar características técnicas principales.. -. Analizar los lazos de control entre reservorios y determinar los niveles de agua.. -. Analizar el impacto en las tuberías primarias y secundarias producido por el golpe de Ariete.. -. Estudiar la curva óptima Gaussiana y plasmar en los sistemas de control para la apertura y cierre de las principales válvulas de retención.. -. Aplicar la técnica de lógica difusa en el sistema de control distribuido a través del software de ingeniería usando el lenguaje pseudocódigo. -. Efectuar pruebas de ensayo y estudiar las respuesta deseadas en función a la técnica de control aplicada.. 1.3.. ALCANCES. La trascendencia de esta investigación radica en permitir aplicar la técnica de lógica difusa en los sistemas de control de la planta EPS Moquegua, para lograr reducir básicamente el golpe de Ariete y a su vez mantener el nivel de agua óptimamente, la importancia de concretar el estudio y la aplicación es para brindar servicios de calidad, aporte a la modernización y además presentar un modelo teórico aplicativo. Los principales beneficiados son los habitantes de las región Moquegua que hace uso de este servicio de manera eficiente y moderado permitiendo mejorar consumo estable y preservando el cuidado de sus conexiones internas de agua, también en beneficio sumamente importante es para la plante de saneamiento por lo que reduce considerablemente los costos anuales en mantenimiento gracias a la introducción de control de lógica difusa en la red en función de exigencias y sus necesidades.. 12.
(13) 1.4.. LIMITACIONES. El presente trabajo se limita al estudio de control simple y aislado del sistema distribución de aguas usando el PID para el control de nivel y caudal y lógica difusa para la reducción del golpe de ariete.. 1.5.. JUSTIFICACIÓN DEL ESTUDIO. Estimamos que este estudio es necesario para aplicar los distintos tipos de controladores en plantas con equipamiento industrial. Estimamos que este estudio es necesario y actual para poder expandir los conocimientos en ingeniería y técnicos mediante la puesta en práctica de los mismos en toda la automatización empleada y necesaria de esta tesis.. 2. MARCO TEÓRICO. 2.1.. CONTROL DE LÓGICA DIFUSA. Un tipo de lógica que reconoce más que simples valores verdaderos y falsos. Con lógica difusa, las proposiciones pueden ser representadas con grados de veracidad o falsedad. Por ejemplo, la sentencia "hoy es un día soleado", puede ser 100% verdad si no hay nubes, 80% verdad si hay pocas nubes, 50% verdad si existe neblina y 0% si llueve todo el día. La Lógica Difusa ha sido probada para ser particularmente útil en sistemas expertos y otras aplicaciones de inteligencia artificial. Es también utilizada en algunos correctores de voz para sugerir una lista de probables palabras a reemplazar en una mal dicha. La Lógica Difusa, que hoy en día se encuentra en constante evolución, nació en los años 60 como la lógica del razonamiento aproximado, y en ese sentido podía considerarse una extensión de la Lógica Multivaluada.. 13.
(14) La Lógica Difusa actualmente está relacionada y fundamentada en la teoría de los Conjuntos Difusos. Según esta teoría, el grado de pertenencia de un elemento a un conjunto va a venir determinado por una función de pertenencia, que puede tomar todos los valores reales comprendidos en el intervalo [0,1]. La representación de la función de pertenencia de un elemento a un Conjunto Difuso.. Figura 1 Grafica de Función de Pertenencia. 2.2.. CONTROL PID. Un controlador PID (Proporcional Integrativo Derivativo) es un mecanismo de control genérico sobre una realimentación de bucle cerrado, ampliamente usado en la industria para el control de sistemas. El PID es un sistema al que le entra un error calculado a partir de la salida deseada menos la salida obtenida y su salida es utilizada como entrada en el sistema que queremos controlar. El controlador intenta minimizar el error ajustando la entrada del sistema.. El controlador PID viene determinado por tres parámetros: el proporcional, el integral y el derivativo. Dependiendo de la modalidad del controlador alguno de estos valores puede ser 0, por ejemplo un controlador Proporcional tendrá el integral y el derivativo a 0 y un controlador PI solo el derivativo será 0, etc. Cada uno de estos parámetros influye en mayor medida sobre alguna característica de la salida (tiempo de establecimiento, sobre oscilación) pero también influye sobre las demás, por lo que por mucho que ajustemos no encontraríamos un PID que redujera el tiempo de establecimiento a 0, la sobre oscilación a 0, el error a 0,... sino que se trata más de ajustarlo a un término medio cumpliendo las especificaciones requeridas. 14.
(15) 2.2.1. ACCIÓN PROPORCIONAL. La respuesta proporcional es la base de los tres modos de control, si los otros dos, control integral y control derivativo están presentes, éstos son sumados a la respuesta proporcional. “Proporcional” significa que el cambio presente en la salida del controlador es algún múltiplo del porcentaje del cambio en la medición. Este múltiplo es llamado “ganancia” del controlador. Para algunos controladores, la acción proporcional es ajustada por medio de tal ajuste de ganancia, mientras que para otros se usa una “banda proporcional”. Ambos tienen los mismos propósitos y efectos[1].. 2.2.2. ACCIÓN INTEGRAL. La acción integral da una respuesta proporcional a la integral del error. Esta acción elimina el error en régimen estacionario, provocado por el modo proporcional. Por contra, se obtiene un mayor tiempo de establecimiento, una respuesta más lenta y el periodo de oscilación es mayor que en el caso de la acción proporcional. 2.2.3. ACCIÓN DERIVATIVA. La acción derivativa da una respuesta proporcional a la derivada del error (velocidad de cambio del error). Añadiendo esta acción de control a las anteriores se disminuye el exceso de sobre oscilaciones.. Existen diversos métodos de ajuste para controladores PID pero ninguno de ellos nos garantiza que siempre encuentre un PID que haga estable el sistema. Por lo que el mas usado sigue siendo el método de prueba y error, probando parámetros del PID y en función de la salida obtenida variando estos parámetros. 15.
(16) 2.3.. SCADA. Un Sistema SCADA (Supervisory Control and Data Acquisition) es un Sistema de Automatización o Sistema de Control Industrial que involucra, control directo o comunicarse con uno o más de los siguientes: -. Redes de automatización industrial y máquinas. -. Telemetría y control remoto utilizando comunicaciones continuas o ráfaga. -. Sistemas de Control de Procesos y Control de Procesos Estadísticos. -. Sistemas de Adquisición de Datos ( DAQ s). -. Históricos y Servidores de almacenamiento de datos. -. Sistemas de Control Industrial utilizando PLCs y RTUs.. -. Sistemas del entorno empresarial, tales como sistemas ERP y MES.. -. Entorno de Computación de Nube Industrial. -. Sistemas de Seguridad y Procesos. -. Seguridad de máquina local. -. Seguridad y control de procesos. -. Conectividad empresarial o global que implica LDAP.. 2.3.1. SCADA WORLDVIEW. Survalent Technology Corporation es uno de los principales proveedores de soluciones de automatización para el sector industrial, desde 1964, comprometido con la satisfacción de sus clientes a largo plazo, lo cual explica su record de 100% en retención de clientes [2].. Tiene su sede principal en Canadá y su rubro es la fabricación de equipos, tales como RTU y concentradores de datos, sistemas SCADA, interfaces gráficas de usuario. 16.
(17) (GUI) e interfaces hombre máquina, para aplicaciones en los diferentes sectores industriales como Minería/Petroleo/Gas, Transporte, Electricidad, Agua, etc. Las principales características del Software SCADA Survalent son: . Arquitectura completamente abierta y fácilmente escalable, preparada para crecer modularmente sobre el mismo software desde un sistema con un solo servidor hasta un sistema cuádruple redundante.. . Poderosa Interfaz Gráfica que permite mostrar vistas geográficas de áreas de jurisdicción y mediante funciones de zoom, ingresar desde este nivel de vista hasta una estación remota cualquiera y operar sus equipos en forma convencional.. -. Cumple con las especificaciones MultiSpeak de la National Rural Electric Cooperative Association (NRECA), garantizando una arquitectura abierta desde el punto de vista de la comunicación con cualquier proveedor GIS (Geographic Information System) y CIS (Customer Information System).. -. Edición en línea de la Base de Datos de Tiempo Real. No necesita rearranques pues se puede extender el sistema sin comprometer su funcionamiento.. -. Integra RTUs, PLCs, medidores, relés de protección de cualquier fabricante mediante protocolos abiertos IEC61850, IEC-870-5-101, IEC-870-5-104, DNP3.0, Modbus.. -. Soporte para cualquier medio de comunicación como Onda Portadora, Línea Dedicada, Línea Conmutada, Internet, Microondas (VHF, UHF), GPRS, CDPD, WLAN, WIMAX, etc.. -. Manejo de un básico de 200,000 puntos con capacidad de llegar al 1’000,000, lo que asegura la integración completa de todas las instalaciones del cliente.. -. Sistema con protocolo ICCP TASE 2.0 nativo, escribe y lee los valores directamente desde y hacia la base de datos del SCADA en tiempo real, evitando retrasos que ocurren con otras tecnologías.. 17.
(18) 2.3.2. CUMPLIMIENTO DE ESTÁNDARES DE SISTEMAS ABIERTOS. -. MS Windows Operating System. -. MS SQL Server RelationalDatabase. -. DXF and DWG graphicsimport. -. ODBC (Open Database Connectivity). -. TCP/IP. -. OPC (OLE for Process Control). -. MultiSpeak 3.0. 2.3.3. CARACTERÍSTICAS BÁSICAS DEL SOFTWARE SCADA SURVALENT. -. Múltiple Redundancia. -. Interfaz de usuario de tipo Full Graphical User Interface (GUI). -. Comunicación con RTUs, IEDs, CDS. -. Procesamiento de puntos de estado. -. Procesamiento de puntos analógicos. -. Procesamiento de puntos totalizadores de pulsos. -. Procesamiento de secuencia de eventos (SOE). -. Procesamiento de puntos de control (digitales y del tipo setpoint).. -. Zonas de Responsabilidad · Cálculos · Códigos de calidad de datos. -. Derechos y privilegios de usuario.. -. Procesamiento de alarmas.. -. Prioridades de alarmas.. -. Definición de formatos de alarmas.. -. Generación de Reportes.. -. Editor de reportes.. -. Sistema de manejo histórico de la información.. 18.
(19) 2.3.4. INTERFAZ GRÁFICA WORLDVIEW. -. Visualización del tipo geográfico. -. "Pan" y "Zoom" continuo. -. Control de capas a nivel de zoom (Declutter). -. Importación de archivos DWG y DXF. -. Edición de gráficos y objetos. -. Herramientas de dibujo y alineación. -. Pantalla de Eventos del Operador. -. Pantalla de Alarmas. -. Librería extendida de símbolos , colores y estilos de texto. -. Soporte de imágenes en formatos JPG, GIF, y BMP. -. Configuración amigable de sonidos para los tipos de alarmas. -. Gráficos de tendencia en tiempo real e histórica. 2.3.5. APLICACIONES AVANZADAS -. Programación de secuencia de comandos. -. Captura de disturbios. -. Registro de datos de eventos. -. Programación IEC 61131-3. -. Supresión de Alarmas Maestro / Esclavo. -. Sistema de proyección. -. Anuncio remoto de alarmas. -. Interacción con Excel y Access. -. Interacción hacia SQL, ORACLE y SYBASE. -. Control Panel · IED Wizard. 19.
(20) 2.3.6. PROTOCOLOS DE COMUNICACIÓN. DNP3 DNP3 TCP/IP IEC 60870-5-101 IEC 60870-5-104 MODBUS RTU MODBUS TCP ICCP SNMP IEC 61850 OPC (CLIENT AND SERVER) UCA 2.0 LG 8879 RTC 1032 MDO-11 TEJAS SERIE 3 & 5 LANDYS & GYR 8979. 2.4.. AUTOMATIZACIÓN DE PROCESOS CON PLC. La automatización representa la optimización de procesos, reducción de costos e incremento de la productividad. Tanto los equipos convencionales como los modernos sufren cambios sustanciales, permitiendo excelentes ventajas. Para distintos problemas de automatización, se menciona una variedad de soluciones, unas más sofisticadas que otras, cuya aplicación depende no sólo del conocimiento de la técnica, sino también del personal que tendrá la responsabilidad de su ejecución. Por otro lado, muchos sistemas están conformados por equipos de diferentes fabricantes y funcionan en distintos niveles de automatización; además, a menudo 20.
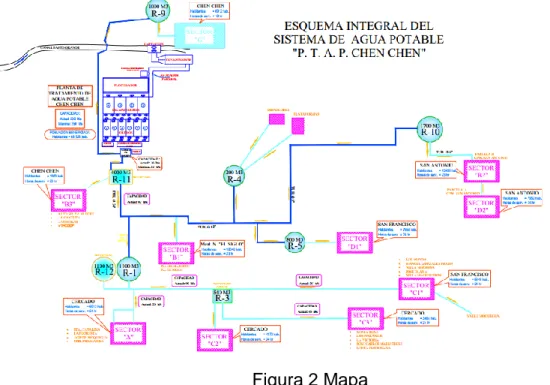
(21) se encuentran distanciados entre sí, pero se desea que trabajen en forma coordinada para un resultado satisfactorio del proceso. Es así que nos apoyamos en las comunicaciones para su integración.. 3. INGENIERÍA DE DETALLE. En esta sección se explica el detalle del hardware utilizado en la implementación de la solución de control de caudal [3]. EPS Moquegua (Entidad Prestadora de Servicios de Saneamiento Moquegua S.A.), tiene como ámbito de influencia las Provincias de Mariscal Nieto y Moquegua es una empresa prestadora de servicios de agua potable y cuyos objetivos son: . Garantizar una calidad y cobertura óptima de los servicios de saneamiento.. . Alcanzar la sostenibilidad económica y financiera empresarial.. . Mejorar las condiciones de gobernabilidad y gobernanza.. . Asegurar la preservación del medio ambiente y prever efectos del cambio climático.. Figura 2 Mapa Según nuestro sistema de distribución de reservorios tenemos la siguiente imagen. 21.
(22) Una red de abastecimiento de agua potable es aquella que facilita que el agua avance desde el punto de captación hasta el punto de consumo en condiciones aptas para su consumo. Por aptas no solo se entiende en cuanto a condiciones sanitarias de calidad, sino también de cantidad. La fuente de agua que da origen al sistema puede ser de: . Agua de manantiales naturales.. . Agua de mar, que se desaliniza antes de entrar en la red de abastecimiento.. . Agua superficial, como la procedente de lagos, ríos, embalses o arroyos.. . Agua subterránea, captada con extracciones.. . Otros, como agua de lluvia almacenada en aljibes.. El proceso de saneamiento y desinfección es el que media entre el agua en su punto de origen y el domicilio para su consumo humano, ya como agua potable. La red de abastecimiento de agua más completa es la que emplea aguas superficiales, con cuatro partes; captación y almacenamiento de agua bruta, tratamiento del agua, almacenamiento del agua tratada y distribución por medio de conducciones. La captación es el punto inicial de la red. Las aguas subterráneas se captan con pozos o galerías de extracción. En el caso de aguas que están en la superficie, se emplean bocatomas, galerías filtrantes, paralelas o perpendiculares, siempre teniendo como referencia el curso del agua. El almacenamiento de la llamada ‘agua bruta’ se realiza con la construcción de instalaciones como los embalses, con los que se conserva el agua procedente de ríos, arroyos, etc… Este almacenamiento asegura el caudal durante todo el año.. Figura 3 (Embalse -----------------> Bocatomas) 22.
(23) El acuífero ejerce de tanque de almacenamiento en sistemas que recurren al agua subterránea. Lo común es que se produzca la recarga natural de esa agua. Si no se logra, se recurre a obras hidráulicas para ello.. 3.1.. TRATAMIENTO. Es la parte más compleja y costosa. Aquí se procede a purificar las aguas. Este tratamiento cambiará dependiendo la calidad del ‘agua bruta’. Consta de las siguientes partes:. 3.1.1. REJA. Impide el paso de ‘material grueso’ y lo retira una vez en la superficie. Este material puede ser superficial y flotante, o de arrastre de fondo. 3.1.2. DESARENADOR. Impide el paso de materiales en suspensión. 3.1.3. FLOCULADORES. Añaden productos químicos para decantar materiales finos y sustancias en suspensión coloidal. 3.1.4. DECANTADORES Y FILTROS. Los decantadores, llamados también sedimentadores, apartan una parte de material fino. Los filtros son útiles para retirar el material en suspensión. 3.1.5. FILTROS. Para retirar totalmente el material en suspensión. 3.1.6. DISPOSITIVO DE DESINFECCIÓN. En algunos casos es necesario aplicar tratamientos como la osmosis inversa, el intercambio iónico o los filtros de carbón activo.. 23.
(24) 3.2.. ALMACENAMIENTO DE AGUA TRATADA. El almacenamiento puede realizarse en tanques de cabecera, que se colocan aguas arriba de la red que alimentan, o en tanques de cola, en el extremo opuesto de la red. En el primer tipo de tanques toda el agua distribuida en la red pasa por ellos, cosa que no ocurre en los tanques de cola.. Figura 4 Tanque de tratamiento de agua. Para el agua tratada existen dos tipos de tanques; apoyados en el suelo y elevados. Cada uno cuenta con hipoclorador para convertirla en apta para el consumo humano.. 3.3.. RED DE CONDUCCIÓN DE DISTRIBUCIÓN. Consta de estaciones de bombeo; tuberías principales, secundarias y terciarias; tanques de almacenamiento intermediarios, válvulas; dispositivos para medición y derivaciones domiciliares.. 24.
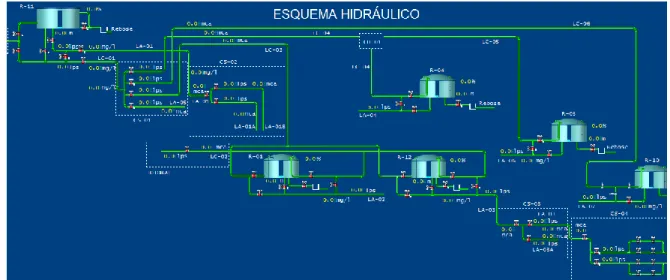
(25) Figura 5 Diagrama unifilar de tanques de distribución. Figura 6 Diagrama unifilar de línea de conducción. 25.
(26) Figura 7 Detalle de tuberías en un reservorio. 3.4.. ARQUITECTURA DE RED. En la industria requiere el control de múltiples sensores y actuadores para lograr una producción más eficiente, por lo que se necesita un sistema acorde a la planta, donde muchas de sus etapas se encuentran descentralizadas, haciendo que esto sea similar a un sistema de control distribuido. Nuestro sistema se incorpora a una red inalámbrica la cual emplea. -. Una PC donde se encuentra el SCADA. -. Un PLC S7-1200. 26.
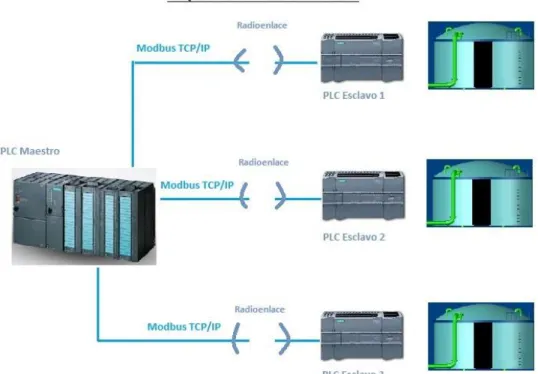
(27) Figura 8 Arquitectura del sistema. Figura 9 Detalle de Comunicación entre PLCs Maestro Esclavo. 27.
(28) 3.5.. EQUIPAMIENTO E INSTRUMENTACIÓN PARA RADIOENLACE. 3.5.1. DESCRIPCIÓN DE EQUIPOS Item Equipo 1. AP Access Point Ubiquiti Power Beam M5-400. Cantidad 2. AirMax. 2. PLC S7-1200 215. 1. Tabla 1 Equipos de Radioenlace. 3.5.1.1.. AIRMAX POWERBEAM M5-400 ANTENA 25 DBI, 5GHZ, 802.11A/N, DUAL-POL. A partir de la primera generación de NanoBridge de Ubiquiti Networks, quien fue pionera en el diseño todo-en-uno para un producto AirMAX funcionando como un CPE (Customer Premises Equipment), ahora Ubiquiti Networks lanza la última generación de CPE, el PowerBeam. Tiene una antena que ofrece 25 dBi de ganancia y 26 dBm de Potencia de Transmisión, opera en el intervalo de frecuencia de 5170 – 5875 MHz. Cuenta con un procesador Atheros MIPS 74KC y 64MB de Memoria RAM, además de 8 MB para almacenamiento. También tiene un puerto Gigabit Ethernet 10/100/1000. El reflector tipo plato es de 400 mm a diferencia del NanoBeam M5-300 que es de 300 mm, además el NanoBeam M5-400 tiene una franja gris delgada alrededor del centro del Feed, para diferenciarla del modelo 300 [4].. 28.
(29) 3.5.1.1.1. MEJORA DE INMUNIDAD AL RUIDO. El PowerBeam dirige la energía de RF en un ancho de haz más uniforme. Con la energía en una dirección, también conocido como filtro espacial de ruido, la inmunidad al ruido se mejora notablemente. Esta característica es especialmente importante en un área donde se encuentran otras señales de RF de la misma frecuencia o similar.. 3.5.1.1.2. DISEÑO PLATO REFLECTOR. La tecnología de Plato Reflector de Ubiquiti InnerFeed integra la interface de radio dentro de la antena, así que no hay necesidad de un cable. Esto mejora el rendimiento, ya que elimina. las. pérdidas. por. cable.. Proporciona un mayor rendimiento gracias a su procesador más rápido y el diseño mecánico innovador a un bajo costo, la NanoBeam es extremadamente versátil y rentable de implementar.. 3.5.1.1.3. TECNOLOGÍA AIRMAX INCLUIDA. La PowerBeam utiliza la tecnología AirMax, un protocolo de Acceso Múltiple por División de Tiempo, en inglés Time Division Multiple Access de Ubiquiti (TDMA) que a diferencia del protocolo estándar de Wi-Fi, permite a cada cliente enviar y recibir datos a través de los intervalos de tiempo pre-asignados programadas por un controlador inteligente. Este método de ranuras de tiempo, elimina las colisiones de nodo ocultas y maximiza la eficiencia en tiempo. Proporciona mejoras de rendimiento significativas en la latencia, el rendimiento y la escalabilidad en comparación con todos los demás sistemas para exteriores de su clase.. 29.
(30) Figura 10 Antena de Radioenlace 3.5.1.1.4. CONFIGURACIÓN SERVIDOR-CLIENTE. IP Access Point Servidor= 192.168.0.69 IP Access Point Servidor= 192.168.0.68. IP PLC S7-1200. usuario:ubnt usuario:ubnt. password :ubnt password :ubnt. = 192.168.0.67 Tabla 2 Tabla de Ip de Radioenlace. 3.5.1.2.. PLC SIEMENS S7-1200 CPU 1214. El sistema SIMATIC S7-1200 se suministra en cinco modelos diferentes, CPU 1211C, CPU 1212C, CPU 1214C, 1215C y 1217C; cada uno de ellos puede ampliarse para adaptarse exactamente a los requisitos de su máquina. Se puede añadir una placa de funciones dentro de la parte frontal de cualquier CPU para ampliar fácilmente las E/S digitales o analógicas sin afectar al tamaño físico del controlador.. 30.
(31) CPU SIMATIC S7-1200 serie 1214C La CPU compacta de alto rendimiento Con 24 entradas y salidas integradas Interfaz Ethernet integrada Contador rápido Controlador PID básico Reloj de tiempo real integrado Entradas de alarma Terminales extraíbles en todos los módulos Ampliable con: 1 placa de señal (SB) o 1 tarjeta de comunicación (CB) 8 módulos de señal (SM) Máx. 3 módulos de comunicación (CM). Figura 11 PLC S7-1200 3.5.1.3.. ALCANCES DE RADIOENLACE. El Informe presenta la integración del Sistema SCADA (Worldview) existente en la EPS Moquegua S.A. del C.P. Chen Chen, con el Reservorio R-09.. Radioenlace con línea de vista para comunicar de manera transparente un PLC S7-1200 (protocolos Modbus-Ethernet) con central de servidores redundantes CISCO. 31.
(32) 3.5.1.4.. UBICACIÓN. El Reservorio a intervenir se encuentra ubicado en el C.P. Chen Chen del Distrito de Moquegua, Provincia Mariscal Nieto, Región Moquegua. Los límites son los siguientes:. 1.. Por el Norte. : Distritos de Torata y Samegua.. 2.. Por el Sur. : Provincia de Ilo.. 3.. Por el Este. : Distrito de Jorge Basadre (Región Tacna).. 4.. Por el Oeste : Prov. Gral. Sánchez Cerro y Distrito de Islay (Región Arequipa).. La zona de estudio está ubicada en las coordenadas UTM WGS-84 siguientes: UBICACIÓN Reservorio R-09. ESTE. SUR. ALTURA (msnm). 296497.39. 8097310.18. 1581. Figura 12 Vista Satelital. 32.
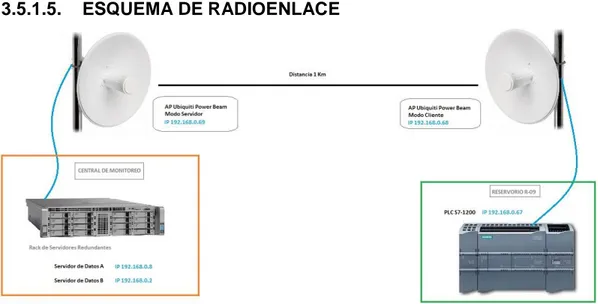
(33) Perfil de Línea de Vista (Distancia: 1Km).. Figura 13 Vista Perfil. 3.5.1.5.. ESQUEMA DE RADIOENLACE. Figura 14 Esquema de Radioenlace Siendo las medidas para el escalamiento: Sensor de 0…2.5 bar Medidas. Lectura PLC. Bar. Nivel. Altura (metros). Max. 9275. 0.44 bar. 100. 4.2 m. Min. 5450. 0 bar. 0. 0m. Tabla 3 Escalamiento de Sensor de Presión a Nivel de Agua 33.
(34) 3.5.2. DESCRIPCIÓN DE INSTRUMENTOS A UTILIZAR. En esta sección describiremos los equipos más importantes que podemos encontrar en una planta de distribución de agua potable.. 3.5.2.1.. SENSORES Y TRANSMISORES DE SEÑAL. Por medio de los sensores y transmisores de señal se realiza de medición en un sistema de control, esta es necesaria para llevar a cabo las acciones de control. El sensor se encarga de registrar magnitud física y llevarla a él sensor que se encarga de convertir esta magnitud física en una señal eléctrica de tensión o corriente y llevar esta señal hasta el equipo que realiza la acción de control. Cuando se utilizan sensores un aspecto importante es lo que llamamos escalamiento, con este se relaciona la magnitud física y la señal eléctrica, por medio de una ecuación, que en la mayoría de los casos es lineal, para este caso se relaciona el valor mínimo y máximo de la medición del sensor con un valor mínimo y máximo de una referencia eléctrica, la cual puede ser de corriente o de tensión. Entre las señales que se manejan se encuentran las eléctricas o electrónicas, las cuales puede ser de corriente (4 a 20mA), o de tensión (0 a 10 V), también existen las magnitudes discretas, las cuales son representadas por dos estados, uno o cero. Los sensores más comunes utilizados en los procesos de la industria actual, son los de presión, flujo, temperatura y nivel. Una de las características principales de un sensor es la ganancia, esta relaciona la señal eléctrica con un porcentaje de apertura de la válvula obtenido por el flujo máximo a través de la variable Cv dada en la hoja de datos de la válvula. Ecuación 1. 34.
(35) KT . Rango de salida Rango de Entrada. [1]. La respuesta dinámica es suficientemente rápida en la mayoría de los sensorestransmisores. Así, la respuesta dinámica puede ser representado por un sistema de ecuaciones de primer orden, ya que las constantes de tiempo muerto se pueden despreciar, la expresión matemática que representa al sensor se muestra en la ecuación 3.2.. G (s) . KT s 1. [2]. Dónde: KT: Ganancia del transmisor. : Constante del tiempo del transmisor.. 3.5.2.2. SENSOR TRANSMISOR DE PRESIÓN SITRANSP200. 3.5.2.2.1. SITRANS P200/P210/P220. Los SITRANS P200, P210 y P220 son transductores de medida compactos de un rango para medir la presión absoluta y relativa. Dentro de esta serie se utilizan dos tipos de sensores de presión: dos sensores de acero inoxidable y un sensor con membrana cerámica. De este modo se facilita la medición de la presión de proceso, la presión absoluta y la presión hidrostática. La presión determinada por los sensores se transforma en una señal de 4-20 mA o de 010 V, según se prefiera.. 35.
(36) Figura 15 Sensor de Presión 3.5.2.2.1.1. DETALLES Desviación de la curva característica. ≤ 0,25 %. Estabilidad a largo plazo. ≤ 0,25% / 12 meses. Rango de medición. SITRANS P200: de 1 bar a 60 bar relativos de 0,6 bar a 16 bar absolutos SITRANS P210: de 100 mbar a 600 mbar relativos SITRANS P220: de 2,5 bar a 1000 bar relativos Tabla 4 Detalles Sensor de Presión. 3.5.2.2.1.2. VENTAJAS. . Alta precisión de medida Carcasa robusta de acero inoxidable Gran resistencia a sobrecarga Para fluidos agresivos y no agresivos Para medir la presión de líquidos, gases y vapores Construcción compacta. 3.5.2.3. VÁLVULAS DE CONTROL Cuando se requiere realizar el control de un flujo variable, es necesario utilizar elementos que sean capaces de variar en un porcentaje su apertura para poder así manejar el caudal que pasa por ellos, en el caso de las válvulas de control el control se realiza por una señal eléctrica que se traduce en un porcentaje de apertura en la válvula.. 36.
(37) 3.5.2.3.1. VÁLVULA DE RETENCIÓN DFT 3.5.2.3.1.1. VÁLVULAS DE RETENCIÓN NOMINAL NUCLEAR. Distribuidor exclusivo de retención en línea válvulas para aplicaciones nucleares y fabricante autorizado de ASME III y seguridad relacionados con Válvulas de retención . ASME / ANSI clase 150-2500 1/4 – 24 pulgadas. 3.5.2.3.1.2. DISEÑADO PARA PREVENIR EL "MARTILLO DE AGUA" El diseño asistido por resorte, en línea en todas las válvulas de cheque DFT ® asegura que a medida que disminuye el flujo hacia adelante en una tubería, el disco comienza acercándose a la sede. Cuando el flujo se detiene, el disco se cierra contra el asiento prevenir la revocación del flujo. Esto evita que la válvula cerrarse de golpe cerrado provocando "Ariete" y el ruido resultante y daños en los sistemas de tuberías. -. Diseñado para prevenir el "martillo de agua". -. Primavera diseño asistido en línea asegura que como las disminuciones de flujo hacia adelante, el disco comienza a acercarse a la sede. -. Verdadera flexibilidad en la aplicación de 1/4 a 24 pulgadas. Figura 16 Válvula de Retención 37.
(38) 3.5.2.4.. FLUJOMETRO SITRANS F M MAG 5100 W. Es un tipo de instrumento de medición de alta precisión y desempeño confiable. A través de mejoramientos técnicos continuos, se ha mejorado la tecnología excitación, tecnología de recubrimiento y la tecnología inteligente. Este tipo de medidores de flujo son, especialmente, apropiados para la medición del flujo volumétrico de electricidad en medios conductivos, como ácidos, alcalinos, pulpa etc.. 3.5.2.4.1. DESCRIPCIÓN. El sensor SITRANS F M MAG 5100 W posee revestimientos patentados de caucho NBR o ebonita y EPDM. Es idóneo para aplicaciones de agua en los sectores de las aguas subterráneas, aguas potables, agua de refrigeración aguas residuales y lodos.. Figura 17 Caudalímetro. El caudalímetro completo se compone de un sensor de caudal SITRANS F M MAG 5100 W y uno de los siguientes transmisores de la serie MAG: SITRANS F M MAG 5000: transmisor económico, precisión de +0,4% del caudal. SITRANS F M MAG 6000: comunicación por bus, función de lotes y precisión de +0,2% del caudal. 38.
(39) SITRANS F M MAG 6000 I:caja de aluminio, homologaciones Ex, comunicación por bus, función de lotes y precisión de +0,2% del caudal. El sensor es compatible con el calculador de energía térmica SITRANS FUE950. Ejemplos de aplicación: extracción de agua, red de distribución de agua, contadores de agua así como para la transferencia de custodia como contador de agua o caudalímetro para medir la cantidad de frío.. 3.5.2.4.2. DETALLES Rango de medida. De 0 a 10 m/s. Diámetros nominales. De DN 25 a DN 2,000 (de 1" a 78"). Precisión de medida. 0,2% ± 2,5 mm/s. Presión de servicio. máx. 16 bar (máx. 150 psi). Temperatura ambiente. De -40 a 70 °C (de -40 a 158 °F). Temperatura del medio. De -10 a 70 °C (de 14 a 158 °F). Revestimientos. EPDM Caucho NBR Caucho duro tipo ebonita. Electrodos. Hastelloy C-276 Electrodos de puesta a tierra integrados. Material. Acero al carbono con revestimiento epoxi anticorrosión de dos componentes. Homologaciones para aguas potables. EPDM: WRAS, NSF/ANSI Standard 61, DVGW 270, ACS y BelgAqua NBR: NSF/ANSI Standard 61, WRAS Ebonita: WRAS. Homologaciones para transferencia de custodia. OIML R49 MI-001 PTB K7.2 (Alemania) BEV OE12/C040 (Austria). Homologaciones generales. Certificado MCERTS-Sira N.º MC080136/00. Tabla 5 Detalles Sensor de Caudalímetro. 39.
(40) 3.5.2.4.3. VENTAJAS. . Plazo de entrega corto Robusto revestimiento de caucho NBR para todas las aplicaciones de aguas y aguas residuales Revestimiento EPDM apto para aplicaciones de aguas potables que requieran homologaciones especiales Revestimiento de ebonita para todas las aplicaciones de aguas potables, aguas en general y aguas residuales Alta precisión con caudales bajos para detección de fugas de agua (revestimiento NBR o EPDM) Adecuado para tendido subterráneo e inmersión permanente (IP68) o instalación subacuática Dimensionado para métodos de ensayo MAG in situ con uso de datos "Fingerprint" en la SENSORPROM.. Figura 18 Caudalimetros SITRANS. 3.5.2.5.. SENSOR DE INUNDACIÓN WINLAND WATERBUG WB-200. El Detector de Inundación cableado es utilizado para detectar la presencia de líquidos a base de agua en cualquier lugar como sótanos, baños o tanques de agua. El. 40.
(41) Detector de Inundación Inalámbrico avisa al panel de control en caso de una inundación, permitiendo una rápida respuesta. Detector de nivel de agua ideal para bombas de pozo sótano, áreas de drenaje, aulas, zonas de almacenamiento de documentos, almacenes y sistemas de riego. Utilícelo en conjunto con el panel de alarma, campana , transmisor inalámbrico , etc. Pueden conectarse hasta 6 sensores cableados en modo paralelo de hasta 100’ (30.48 m) desde la unidad para una protección más amplia, . . Cableado con alimentación. . Incluye un sensor de superficie estándar sin supervisión 1040 (W-S-U). . Acepta sensores estándar sin supervisión para uso debajo de las alfombras 1041 (WUC-U). . Una salida de relé tipo C (N.O./N.C.) Cada paquete contiene: 1 Detector electrónico de agua. 1 Probador de superficie que no requiere supervisión. 1 Manual de instalación y operación.. Figura 19 Sensor de Inundación. 41.
(42) 4. CONTROL AUTOMÁTICO. El termino control automático, según la teoría, involucra tener un valor o magnitud dentro de un rango deseado o lo más cercano a un valor constante, el cual puede ser dado por una consigna de entrada, en la actualidad el control de procesos involucra una extensa lista de magnitudes como lo son: caudal, temperatura, corriente, tensión, velocidad, nivel, presión, potencia, viscosidad, concentración, entre otros. Otro detalle es que la interacción con el mundo real es analógica o continua, y el control de variables físicas involucra sistemas que pueden ser estables por naturaleza, al igual que existen otros que son inestables, en los primeros es necesario simplemente hacer un diseño de controlador para alcanzar el valor de la consigna en un tiempo determinado, sin embargo en el segundo es necesario estabilizar primero el sistema y luego buscar llegar al valor de la consigna o referencia. En la práctica a la hora de diseñar un control se debe tener conocimientos físicos y matemáticos del proceso a modelar, así como de la tecnología con la que se va a implementar el control, se debe tener en cuenta que una regulación eficiente debe ser rápida, precisa y sin oscilaciones, con el objetivo de corregir las desviaciones antes de que aparezcan.. 4.1.. DISEÑO DE CONTROLADORES DIFUSOS. El controlador lógico difuso se basa en el modelo lingüístico de la estrategia del operador humano, es decir, tiene la capacidad para operar con conceptos propios del razonamiento cualitativo, fundado sobre un soporte matemático que permite extraer conclusiones a partir de un conjunto de observaciones y reglas cualitativas. La esencia de tal modelo es un programa basado en reglas, por lo que clasifica entre los llamados sistemas expertos [2].. 42.
(43) Un controlador difuso se compone de cuatro elementos: el fusificador, la base de conocimiento, la toma de decisiones (mecanismo de inferencia) y defusificador.. 4.1.1. FUSIFICADO. La primera tarea del controlador lógico difuso (FLC) es traducir el valor medido en términos de valores lingüísticos. El proceso consiste en la medición de las variables de entrada al controlador realizando un mapeo a escala que transforma el rango de valores de las variables de entrada en los correspondientes valores lingüísticos en el universo discurso [3]. En la fusificación de las entradas se hace la lectura de las señales de nivel y flujo, las cuales se codifican de tal forma que queden en términos de los conjuntos difusos, como se muestra en la figura 17. Así, en esta etapa se determina su correspondiente grado de pertenencia.. Figura 20 Bloque Difusor. La creación del algoritmo se basa exclusivamente en descripciones lingüísticas de los operadores acerca de su actuación en la dirección del proceso [4]. Se puede concluir entonces que el fusificado es la transformación de la información determinista enviada del proceso al controlador difuso en información cualitativa que toma como referencia conjuntos difusos y variables difusas.. 43.
(44) 4.1.2. BASE DE CONOCIMIENTO. La base de conocimiento consiste en una base de datos y otra de reglas. La base de datos proporciona las definiciones necesarias para las reglas de control y la manipulación de los datos difusos. El número máximo de reglas viene dado por el producto de números de particiones de todas las variables lingüísticas de entrada al FCL. Para hablar de una base de reglas, es preciso elegir cuáles variables se tomaran como entrada y cuáles como salida del FCL. En la figura 18 se puede observar cómo se define la variable entrada nivel; de la misma manera se definen las demás entradas y las salidas.. Figura 21 Definición de variables. 4.1.3. TOMA DE DECISIONES. La toma de decisiones es la médula del controlador difuso (mecanismo de inferencia). Tiene la capacidad de simular la toma de decisiones humanas basada en conceptos y acciones de control y empleando implicaciones y reglas de inferencia de la lógica difusa. Estas tareas se resuelven utilizando las operaciones lógicas de disyunción, conjunción e implicación, de tal forma que la evaluación de una regla vendrá dada por un antecedente y un consecuente. Los sistemas difusos tipo Mamdani tienen la siguiente estructura: 44.
(45) El antecedente se construye con variables difusas y funciones de pertenencia igual que en el Mamdani, pero el consecuente es una función de las variables difusas. Para evaluar un sistema Takagi-Sugeno se siguen los siguientes pasos: 1. Se calculan los grados de pertenencia de las variables difusas en el punto seleccionado. 2. Se calculan los grados de cumplimiento de acuerdo con las reglas dadas y usando el operador mínimo del Mamdani o el operador producto de Larsen. 3. Se calcula la función de acuerdo con el consecuente. 45.
(46) 4. Se calcula la función de salida dada por:. Donde: n en el número de reglas. El sistema Takagi-Sugeno se usa principalmente en: -. Aproximación de funciones. -. Modelamiento difuso. -. Controladores difusos. Es importante conocer las etapas de activación y desactivación de las señales para la toma de decisiones. Supondremos en lo que sigue que la base de reglas es de tipo clásico, y las reglas se realizaran con base en la figura 19.. Figura 22 Grafica de Posible activación de reglas. 46.
(47) Si< estado del proceso>entonces <acción de control> -. En los puntos e1 y e2 el error es positivo y la derivada del error es también positiva, para lo que se generará una salida positiva.. -. En el punto e3 el error es negativo y la derivada del error es positiva, para lo que se generará una salida cero.. -. En los puntos e4 y e5 el error es negativo y la derivada del error es también negativa, para lo que se generará una salida negativa.. -. En el punto e6 el error es cero y la derivada del error es negativa, para lo que se generará una salida cero.. -. En el punto e7 el error es positivo y la derivada del error es cero, para lo que se generará una salida positiva.. De esta manera se construye la tabla FAM (fuzzy asociative memory) para tres particiones, como se puede observar en la tabla 1, que describe la relación entre las variables de entrada y las variables de salida.. Tabla 6 FAM (Fuzzy Asociate Memory) de 3 particiones. Entonces, un estado dado dará lugar a la "activación" de varias reglas y se activarán solamente aquellas en las que todos los conjuntos difusos del antecedente resulten ser no nulos para el estado dado [4].. 47.
(48) 4.1.4. DEFUSIFICADO. Es la etapa del FCL encargada de entregar al proceso acciones de control deterministas a partir de salidas difusas resultantes de la composición de reglas. La acción sobre el proceso exige que el controlador brinde a su salida una magnitud dada, no difusa, por ejemplo, una tensión o una presión neumática dada, por lo que es necesario realizar una defusificación, que realiza un mapeo a escala que convierte el rango de valores de las variables de salida al correspondiente universo discurso, y defusifica también la acción de control difusa inferida en una acción de control concreta, como se muestra en la figura 20.. Figura 23 Definición de Salida. En la práctica, para adoptar cierta acción de control, hay que tener muy en cuenta la posición del elemento final de control. Ésta necesariamente tiene que influir en el algoritmo, considerándola como parte de estado del proceso.. 48.
(49) 4.2.. SOFTWARE DE DESARROLLO TIA PORTAL. El Totally Integrated Automation Portal (TIA Portal) integra diferentes productos SIMATIC en una aplicación de software que le permitirá aumentar la productividad y la eficiencia del proceso. Dentro del TIA Portal, los productos TIA interactúan entre sí, ofreciéndole soporte en todas las áreas implicadas en la creación de una solución de automatización.. Una solución de automatización típica abarca lo siguiente: -. Un controlador que controla el proceso con la ayuda del programa.. -. Un panel de operador con el que se maneja y visualiza el proceso.. 4.2.1. VENTAJAS. El TIA Portal ofrece las siguientes ventajas: -. Gestión conjunta de los datos. -. Manejo unitario de los programas, los datos de configuración y los datos de visualización. -. Fácil edición mediante Drag & Drop. -. Comodidad de carga de los datos en los dispositivos. -. Manejo unitario. -. Configuración y diagnóstico asistidos por gráficos. 49.
(50) 4.2.2. SISTEMA DE INGENIERÍA. Con el TIA Portal se configura tanto el control como la visualización en un sistema de ingeniería unitario. Todos los datos se guardan en un proyecto. Los componentes de programación (STEP 7) y visualización (WinCC) no son programas independientes, sino editores de un sistema que accede a una base de datos común. Todos los datos se guardan en un archivo de proyecto común. Para todas las tareas se utiliza una interfaz de usuario común desde la que se accede en todo momento a todas las funciones de programación y visualización.. 4.3.. REGLAS DE INFERENCIA. Estas reglas están hechas para un punto específico de la red de distribución de agua.. Figura 24 Diseño Tuberías en SCADA WorldView. 50.
(51) 4.4.. CONTROL DE NIVEL. El control PID de nivel se hace para garantizar que el caudal sea constante a lo largo de las derivaciones de las tuberías. Existe por lo tanto un nivel VARLevelTank1 que varía entre 0 y la altura del reservorio. Este lazo es entre el sensor de presión y la válvula 1 de entrada. Existe un bloque PID en el STEP7 que permite hacer esta función sin mucho esfuerzo.. 51.
(52) 4.5.. CONTROL DE GOLPE DE ARIETE Considerando que el caudal varía entre los 150 lps y 200 lps. El cierre rápido de las válvulas de retención origina el golpe de ariete en las tuberías surtidoras por lo que el cerrado será lento, por lo que hay que tomar los tiempo y niveles de presión y caudal en las tuberías. Tenemos lo siguiente Llenado de Tanque 1 Después de un mantenimiento tenemos un reservorio vacío, para luego empezar a llenarlo casi al tope. El control es mínimo ya que una vez que llegue a la zona umbral que para nuestro caso es el 90% de llenado iniciara nuestro sistema de lógica difusa. Comparando tanto el caudal de salida, la presión de entrada y el nivel de agua en el reservorio se procederá de la siguiente manera: Si el caudal es bajo menor a 150 lps entonces la válvula de cierre continuara a su máxima potencia. De haber una presión exagerada y el nivel de agua no sube, entonces consideraremos que hay una atascamiento por residuos, y procederemos a cerrar la válvula principal. Al continuar llenando nuestro tanque hasta casi un 100 por ciento, verificaremos lo siguiente: El nivel se encuentra entre un 94% y 90 procederemos a bajar la apertura de la válvula en un 20% para en un tiempo cuya rampa sea de 20 segundos. El nivel se encuentra entre un 96% y 93 procederemos a bajar la apertura de la válvula en un 30% sobre la presión anterior para que en un tiempo cuya rampa sea de 30 segundos. El nivel se encuentra entre un 98% y 95 procederemos a bajar la apertura de la válvula en un 30% en un tiempo cuya rampa sea de 30 segundos. Finalmente si el nivel alcanza el 100% y sobrepasa el 98%, procederemos a cerrar complemente la válvula. La válvula 1 será controlada por una salida del PLC de 4-20ma.. 52.
(53) La cual ira en redundancia con el sensor de presión que hace la medida de nivel en proporción a su medida siendo esto nuestro primer lazo de control fuzzy.. 53.
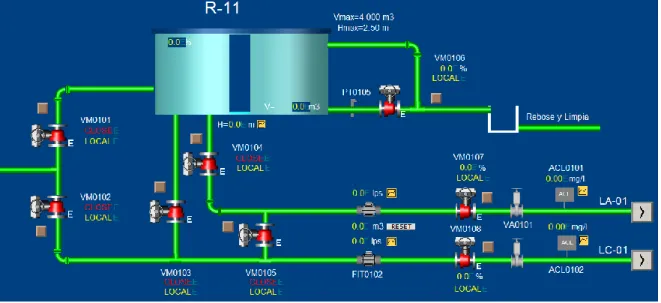
(54) 4.6.. MÉTODO EMPLEADO EN LA MODELACIÓN. Para el cálculo hidráulico se utilizó el programa de cálculo Pump SIM. Pump SIM utiliza el principio de la continuidad de la masa y energía. Las ecuaciones utilizan un esquema eficiente para la liberalización de los términos no lineales y una rutina eficiente para el cálculo de las matrices. Este enfoque permite el acomodamiento de tramos cerrados, válvulas reguladoras de presión, válvulas check, componentes de pérdida de carga menor, bombas, y abastecimientos múltiples de una manera muy eficiente.. 4.7.. ANALISIS DEL SISTEMA A CONTROLAR. En la planta de Agua se encontró lo siguiente. que al hacer el llenado del. reservorio, el cual consiste en mantener un nivel constante a un 90 por ciento de capacidad usando un control PID como función del S7-1200.. Figura 25 Reservorio con Instrumentos. 54.
(55) Figura 26 Reservorio con PID. Figura 27 Reservorio con Lógica Difusa. Durante el cierre total de la válvula de ingreso producto del llenado excesivo uno de los problemas resultantes es el golpe de ariete producido por las aguas, ya que el tiempo de cerrado se considera muy rápido, el cual para controlar la inercia de las aguas , esta produce el golpe de ariete.. 55.
(56) 4.7.1. CALCULO DE TIEMPO DE CERRADO DE VÁLVULA DE ENTRADA DE AGUA. La aplicación de la Lógica difusa está determinada por la comparación entre los valores obtenidos de la teoría y la práctica. Ya que esta pequeña diferencia entre ambas obliga al programador a utilizar la lógica difusa.. . Base de Cálculo MECÁNICA DEL GOLPE DE ARIETE Golpe de ariete (WaterHammer). es la variación pulsatoria de la presión encima y debajo de la presión normal, resultante de la rápida aceleración o desaceleración de la velocidad de flujo debido a la interrupción de la corriente por el cierre o apertura brusca de una válvula o por el arranque y parada de una bomba o por operaciones análogas. Cualquier variación en el caudal de una tubería producido por las acciones mencionadas u otras como la rotura intempestiva de una tubería, originan un cambio de la cantidad de movimiento del flujo, dando origen a una fuerza de impulso que se conoce comúnmente como golpe de Ariete. El cambio súbito del gasto en una tubería puede originar esfuerzos de suficiente magnitud, que podrían exceder las presiones normales de servicio contempladas en el diseño y resultar perjudicial al sistema. Simbología: C = Velocidad de la onda E = Modulo de elasticidad del Material del tubo e = Espesor de la tubería D = Diámetro de la tubería. 56.
(57) L = Longitud de la tubería x = Distancia de una sección a lo largo del eje, medido desde la sección de cambio de flujo t = Tiempo medido del origen del cambio de flujo Htx = Carga total de la sección x en el tiempo t. Qtx = Descarga de la sección x en el tiempo t. Vtx = Velocidad de la sección x en el tiempo t. V = Velocidad inicial antes del tiempo 0 (Veloc. Inicial). = Modulo de elasticidad del agua (2.07 x 104 kg/cm2) g = aceleración de la gravedad = densidad del flujo. = Peso específico del fluido A = Sección transversal del conducto. . consideraremos para el análisis una tubería corta L < 1 000 mt.. Z0 + Ho0 +. H0X =Ho0 -. V2 V02 = ZX + H0X + X 2g 2g. . X. 0. Send +. V 02 X X2 Z X Z 0 2g x. 57. = Sen.
(58) H. H dx x. u. . . A p p . . -A. p dx ρgAdxSen ρAdxU / x . p dx - ρgAdxSen ρAdxU / x. p = - g Sen - U / ............... (I) ρ x 1. x. p = 1H 1 Pero H p = HH x = =g x ρ x ρ x. U/ . En (I). = dU , U/ = (x,t) dt. g. ,. U/ . U U U t x. U U H U = -gSen - [ ] x t x. 58. u dx x.
Figure

+7



Outline
Documento similar
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
diabetes, chronic respiratory disease and cancer) targeted in the Global Action Plan on NCDs as well as other noncommunicable conditions of particular concern in the European
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Este mismo régimen de deberes tiene sentido cuando la actuación de reforma o renovación significa un cambio radical de la morfología urbana, normalmente acompa- ñado por un cambio
