Sistema Inteligente de Supervisión de Alarmas con Microcontroladores PICs, SISAP
70
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA. Sistema Inteligente de Supervisión de Alarmas con Microcontroladores PICs, SISAP.. ___________________________________________________________ ________________________________________________ ___________________________________ Autor: Bernardo Yaser León Ávila. E-mail: [email protected]. Tutor:. M.Sc. Rosbel Martínez Regalado. Especialista de Proyecto de Transmisión de la Gerencia Nacional de Proyecto de ETECSA E-mail: [email protected]. Santa Clara -2008"Año 50 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) Pensamiento:. 'Saber no es suficiente, debemos aplicar. Desear no es suficiente, debemos hacer' Johann W. Von Goethe. I.
(5) Dedicatoria:. A mis padres y a mi hermana, que tanto han esperado este momento. A mi novia, que se que me seguirá siempre.. II.
(6) Agradecimientos:. Rosbel Martínez, que tanto se ha esforzado. A todas las personas que nos han ayudado en la Dirección Territorial de ETECSA, Sancti-Spíritus. A Alexander, que tanto tiempo de máquinas nos donó. A los compañeros de Copextel. A Ioslán, parte vital en este proyecto. A mis compañeros en la Universidad, Erisbel y Adier. Y a todos los que hicieron posibles este trabajo… Muchas Gracias…. III.
(7) Tarea Técnica: 1. Revisión del estado del arte. 2. Recopilación de la información referente a los microcontroladores y sistemas con prestaciones similares a las que necesitamos. 3. Diseño de arquitectura. 4. Diseño de implementación 5. Confección del diseño. 6. Programación del PIC y simulación. 7. Prueba de campo. 8. Confección del informe.. Firma del Autor. Firma del Tutor. IV.
(8) Resumen: Este trabajo trata de dar respuesta a una aplicación concreta solicitada por la Dirección Territorial de ETECSA en Sancti-Spíritus. Se trata de lograr un sistema que recoja la mayor cantidad posible de alarmas, que pueden ser tanto eventos on/off o niveles de voltajes y transmitirlos al edificio de la Gerencia. El sistema estará controlado por un microcontrolador PIC. Los datos serán multiplexados y la transmisión fue solicitada mediante un protocolo con tonos DTMF. Palabras claves: Eventos on/off, Voltajes, Microcontrolador PIC, Datos Multiplexados, Tonos DTMF.. V.
(9) Summary: This work tries to answer a specific application requested by the Territorial Direction, ETECSA in Sancti-Spíritus. It seeks to achieve a system that records the greatest possible number of alarms, which can be both events on / off or voltage levels and transmit them to Building Management. The system will be controlled by a PIC microcontroller. The data will be multiplexed and transmission was requested by a protocol with DTMF tones. Keywords: Events on / off, Voltages, PIC Microcontroller, Data Multiplex, DTMF tones.. VI.
(10) Tabla de Contenidos: Pensamiento:......................................................................................................... I Dedicatoria: .......................................................................................................... II Agradecimientos:................................................................................................. III Tarea Técnica:.....................................................................................................IV Resumen: .............................................................................................................V Summary .............................................................................................................VI Tabla de Contenidos: .........................................................................................VII Introducción: .....................................................................................................- 1 Capítulo I ..........................................................................................................- 5 El actual sistema de supervisión de alarmas. Variante tecnológica. ................- 5 1.1 Sistemas existentes en el mundo. ..........................................................- 5 1.2 El actual sistema de supervisión.............................................................- 6 1.3 Requisitos para una variante tecnológica. ..............................................- 8 1.4 Los microcontroladores PICs. El 16F73..................................................- 9 1.4.1 Los microcontroladores PICs. ..........................................................- 9 1.4.2. El 16F73. .......................................................................................- 12 1.5 Descripción y diagrama en bloque del dispositivo. Distribución de los puertos del PIC. ..........................................................................................- 13 1.6 Periféricos. ............................................................................................- 17 1.6.1 El Bus I2C. El reloj DS1307 y las memorias 24LC256. ..................- 18 1.6.2 Display............................................................................................- 20 1.7 Esquema General .................................................................................- 21 Capítulo II .......................................................................................................- 23 Descripción de algoritmo y software. Esquemas de hardware. .....................- 23 2.1 Ciclo de adquisición de datos. ..............................................................- 23 2.1.1 Estructura de hardware. .................................................................- 24 2.1.2 Estructura de software....................................................................- 25 2.1.3: Captura y medición de voltajes: GETVOLT..................................- 26 -. VII.
(11) 2.1.4: Captura y comparación de alarmas: GETDATA. ...........................- 30 2.2 Comunicación con el exterior................................................................- 33 2.2.1 Protocolo de comunicación. ...........................................................- 33 2.2.2 Estructura de Hardware..................................................................- 36 2.2.3 Estructura de Software. ..................................................................- 38 Capítulo III: .....................................................................................................- 42 Hardware. Montaje y Puesta en Marcha del Dispositivo. ...............................- 42 3.1 Análisis de Hardware. Consideraciones para el Montaje. .....................- 42 3.1.1 Tableta de multiplexores CD40521. ...............................................- 42 3.1.2 La MT8885 .....................................................................................- 45 3.1.2 Línea Telefónica. ............................................................................- 46 3.1.3 Consumo y Fuente de Alimentación...............................................- 47 3.2 Montaje. ................................................................................................- 49 3.3 Puesta en Marcha del SISAP................................................................- 54 3.4 Análisis Económico. ..............................................................................- 55 Conclusiones y Recomendaciones.................................................................- 57 Conclusiones. .............................................................................................- 57 Recomendaciones. .....................................................................................- 57 Bibliografía. ....................................................................................................- 58 -. VIII.
(12) Introducción.. Introducción: La supervisión y seguridad en centros autónomos donde los operadores no llegan con frecuencia se hace un punto de vital atención en cualquier lugar del mundo. Son variadas las empresas que brindan medios de seguridad que van desde alarmas domésticas en casas y vehículos hasta complicadas redes industriales. Securitas Direct define el funcionamiento de una alarma en los siguientes pasos • • • •. Detección. Transmisión. Verificación. Intervención.. (Direct 2008) Los sistemas de alarmas cuentan con sensores que ubicados en posiciones estratégicas detectarán los distintos eventos para los que están destinados y los enviarán por determinados canales a una inteligencia que es el núcleo del sistema. Estos eventos van desde una puerta abierta o el movimiento de un cuerpo extraño visto por un detector volumétrico en una alarma doméstica, hasta un bajo voltaje o sobrecalentamiento en alarmas industriales. Cuando un sistema detecta que uno de sus sensores tiene un estado “crítico” puede tener varias formas de responder. Este recurre a medios sonoros, visibles y a la transmisión del evento, ya sea al propio usuario, a determinada agencia de seguridad u otros medios como los bomberos, ambulancias, etc. Lo más usual es que el medio de transmisión sea una línea telefónica. Se requiere que un sistema de supervisión de alarmas sea lo más autogestionable posible para cuando no se logre transmitir a tiempo el evento, pueda tener registros de estos. El producto debe ser además de fácil manejo y adaptable a diversos entornos. Hoy en día la seguridad es un asunto de suma importancia en nuestros centros telefónicos no atendidos. Se hace necesario contar con sistemas propios de supervisión y control en nuestras empresas.. - 1 -.
(13) Introducción.. La evolución de las tecnologías continúa en una escalada vertiginosa. Los microcontroladores PIC de la Microchip han irrumpido en el mercado con enorme fuerza y cada vez son más potentes y competitivos. Hoy en día son numerosos los equipos que alojan como núcleo de control estos ingenios y ya es imposible pasar por alto sus potencialidades para el desarrollo y la automatización de los procesos. Los microcontroladores PIC contienen las potencialidades propias de un ordenador, pero de menor nivel, contando con numerosos subsistemas que los hace una poderosa herramienta de control. El objetivo de este trabajo es el desarrollo de un Sistema Inteligente de Supervisión de Alarmas con PIC (SISAP) que se generan en los centros telefónicos no atendidos y que sirve como una variante efectiva para los sistemas actualmente instalados que presentan algunos inconvenientes. Para trabajar nos planteamos las siguientes interrogantes científicas: ¿Cuáles son las condiciones que hacen deficiente el sistema actual? ¿Cómo lograr en la práctica que nuevos equipos contribuyan a una mejoría exitosa sobre los ya existentes? ¿Cómo podemos hacer un protocolo eficiente? ¿Qué componentes asegurarán el éxito del nuevo sistema? ¿Existirán posibles inconvenientes a la hora de operar los nuevos sistemas? Para responder estas preguntas, que aluden directamente a los objetivos de nuestro trabajo, primeramente se hizo una revisión crítica de la literatura existente y entrevistas a los operarios y desarrolladores sobre los dispositivos que están instalados actualmente. El modo de transmisión por tonos DTMF es una solicitud de la Dirección Territorial de ETECSA en Sancti Spíritus, con el fin de compatibilizar el nuevo sistema que se encuentra operando en estos momentos. Se realizó una revisión de la literatura sobre las componentes con las que contamos. Esto nos permitió la selección de los integrados a emplear, la. - 2 -.
(14) Introducción.. conformación del hardware y la programación del PIC y simulación del software. Después sobreviene un proceso de depuración y puesta a punto del SISAP. Planteamos entonces la hipótesis: Se contará con el diseño e implementación del dispositivo SISAP (Sistema Inteligente de Supervisión de Alarmas con Microcontroladores PICs), que es una variante tecnológica eficiente y económica frente a los sistemas de supervisión actuales. Este dispositivo, controlado por un PIC, tendrá la autonomía, capacidad para el censo de eventos on/off y voltajes, cuenta con un reloj de tiempo real, una memoria para guardar los eventos y podrá comunica con un servidor remoto mediante tonos DTMF.. Organización del Informe: El informe está estructurado en 3 capítulos: CAPITULO I: Se revisa el estado del arte referente a los sistemas de supervisión de alarmas que se ofertan en el mercado internacional. Se dedicará además a analizar el dispositivo instalado anteriormente para determinar sus problemas y factibilidad de la nueva variante. Además hablará sobre la selección y estudio de los componentes que formarán parte del nuevo hardware así como su estructura. CAPITULO II: Se dedicará a la implementación del software en el PIC y una descripción del mismo. Se mencionan los softwares necesarios para poder desarrollar la aplicación a escala industrial. Se avalará con los resultados en los softwares de simulación. CAPITULO III: Se dedicará a describir el proceso de montaje y puesta en marcha del dispositivo haciendo énfasis en las características de hardware. Se muestran algunos resultados de la aplicación en condiciones de ensayo controladas y a través de la línea conmutada. Se realiza una valoración económica para la inserción del sistema en la provincia de Sancti Spíritus y se analiza la factibilidad de contar con SISAP en ETECSA.. - 3 -.
(15) Capítulo I. - 4 -.
(16) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Capítulo I El actual sistema de supervisión de alarmas. Variante tecnológica. En este capítulo se revisa el estado del arte referente a los sistemas de supervisión de alarmas que se ofertan en el mercado internacional, se hace una descripción del sistema instalado en la Dirección Territorial de ETECSA de Sancti Spíritus, analizando principalmente las limitaciones que presenta y en qué medida podemos solucionarlas. Presentaremos la propuesta de variante tecnológica para este sistema comenzando por la descripción de los problemas a resolver. Se hará una breve descripción de los microcontroladores para hablar del que disponemos para nuestro sistema. Se creó un modelo en bloques del nuevo prototipo. Luego se describirán los elementos con los que contamos.. 1.1 Sistemas existentes en el mundo. Los sistemas de alarmas en el mundo están en plena expansión. La supervisión siempre ha sido un punto clave en el desarrollo de cualquier empresa. Actualmente son numerosas empresas las que brindad servicios de seguridad y supervisión, que van desde alarmas domesticas hasta complejos sistemas industriales. Algunos de los servicios que pueden contratarse son: Alarmas Domiciliarias: Sistemas microprocesados, con teclados y a control remoto. Con y sin comunicación telefónica de aviso,. sirenas,. infrarrojos,. protección perimetral. Proyectos e instalaciones a medida. Alarmas Industriales: Sistemas. de protección perimetrales, inteligentes para. detección de incendios y sensores de humo iónicos y fotoeléctricos. Alarmas con Automatización telefónica: capacidad de manejar la alarma o cualquier artefacto eléctrico de su casa o comercio desde un aparato telefónico desde cualquier lugar del mundo en forma muy sencilla (Alfa 2008).. - 5 -.
(17) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. La ANM Corp. es un ejemplo de empresa que comercializa sistemas de alarmas industriales. Los precios de sus módulos oscilan entre $ 2 200 y $ 4 200 por sitio y ofrecen sistemas muy seguros de detección de intrusos, memoria de eventos, códigos para usuarios, transmisión inalámbrica o por vía telefónica (tanto para alarmas silenciosas como de avisos mediante sirenas), paneles de control y configuración, gabinetes de alta seguridad, entre otros (Corp 2008). Un distribuidor en nuestro país de sistemas de supervisión de alarmas es el fabricante Kantech. Uno de sus módulos cuesta $ 883,028 USD, sólo para controlar dos puertas como máximo y no incluye gastos de los censores magnéticos ni de los accesorios de alimentación e instalación.. 1.2 El actual sistema de supervisión. El sistema que actualmente atiende y controla las alarmas en los centros no atendidos forma parte de una estrategia generalizada en todo el país hace algunos años y está basada en autómatas programables, Sistemas Omron, que capturan y transmiten mediante Modems las alarmas que se generan. Estos sistemas confrontaron dificultades, sobre todo con las condiciones de las líneas telefónicas analógicas, existentes en gran cantidad de centros telefónicos no atendidos de la provincia, puntos donde la comunicación se hace totalmente ilegible para equipos de datos. Otra situación que persiste es que los Modems se alimentan con la CA (corriente alterna). de la red mediante sus propios transformadores, al existir fallas. eléctricas o desconexiones que hacen entrar las baterías de respaldo de CD (corriente continua), la comunicación se interrumpe. La compra de fuentes de computadoras (conocidas del ingles back-UPS, Unit Power Supply) sólo harían más caro el sistema, por lo que no sería una solución práctica. La tabla 1.1 muestra los precios de comercialización de las UPS en la Tienda de Informática de Copextel en Villa Clara.. I8543121006CUC8 I8543122003CUC8. UPS 1000VA TRIPPLITE OMNIVS1000 120V UPS 500VA 220V TRIPPLITE OMNIVSINT500. 1 2. 148.04 101.16. - 6 -.
(18) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. I8543121013CUC8. UPS 2200VA TRIPPLITE 120V SMART2200VS. S/E. 632.26. Tabla 1.1: Lista de precios de las UPS.. Para solucionar estos problemas, la dirección Territorial de ETECSA de SanctiSpíritus, desarrolló un nuevo sistema a base de tonos DTMF que suple, en alguna medida, las deficiencias del generalizado a nivel nacional. Se trata de un sistema utilizado en los centros donde, por una u otra razón no hay autómatas. Es un generador tonos DTMF, la TCM5087 (Instrument 1990), cableado directamente a los eventos on/off (alarmas) que genera el tono correspondiente a la alarma que se activa. Puede enviar hasta 15 eventos (el ‘1111’ no es información) limitando considerable al sistema (Peñarroche, Pérez et al. 2007). Además, la Texas Instrument no recomienda el TCM5087 para versiones de desarrollo (Instrument 1990). La figura 1.1 muestra un esquema a gran escala del sistema que se encuentra en el centro no atendido.. Fig. 1.1: Esquema del Dispositivo actualmente Instalado.. Estos tonos son recogidos en el equipo receptor de la provincia donde se decodifican y según sea, se determina qué alarma representa y se guarda con la fecha y la hora en una computadora que hace función de servidor. Toda la inteligencia y registros se encuentran en la Dirección Territorial, por lo que si la comunicación se interrumpiera se perderían los eventos.. - 7 -.
(19) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Además de la limitación en el número de eventos (sólo 15) existen otras como: no poder controlar el estado de las líneas, carga de las baterías, control de errores, autogestión, pérdidas de datos frente a fallas de conexión, unidireccionalidad en la comunicación. Hoy en día, si bien el estado de las líneas tiene una mejora progresiva para los autómatas, en el territorio de Sancti Spíritus ambos sistemas conviven con las dificultades descritas. A los autómatas se les suma una dificultad y es que su precio en el mercado ronda los $2 000 (Omron 2008), además de los costos de mantenimiento y reparación ya que estos dispositivos tienen años de explotación y las piezas de repuesto son caras y escasas.. 1.3 Requisitos para una variante tecnológica. Este apartado abordaremos los requisitos que queremos lograr en una variante tecnológica. Concretamente estos son los siguientes: • Recoger múltiples eventos on/off. • Capturar y medir niveles diferentes de voltaje de baterías. • Tener una comunicación segura con la Dirección Territorial. • Determinar la desconexión con el servidor. • Guardar los eventos etiquetando el número de la fuente, la fecha y hora del comienzo o fin, aún sin conexión con el servidor. • Contar con display LCD que informe del estado del sistema. • Ser controlable y configurable. • Mantener la filosofía del software de gestión creado en la provincia, con el aumento de su capacidad, teniendo en cuenta la cantidad de alarmas que se aumentarán por sitio. Las mejoras del software de gestión en el nodo provincial será responsabilidad del grupo de hardware de la empresa, los que utilizarán el presente documento para la actualización de su programa. Emplearemos como cerebro del dispositivo un microcontrolador PIC que como centro de procesamiento dependerá de otros componentes para cumplir con. - 8 -.
(20) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. todos los requerimientos planteados. Para ello la Dirección Territorial nos destino el PIC 16F73 (Microchip 2002). Disponemos de un arreglo de multiplexores CD4051 (Instrument 2000), que es capaz de conmutar hasta 8 canales cada uno para un total de 40 eventos, que pueden ser tanto analógicos como digitales,. Entonces si el tiempo no es crítico bien se puede implementar un protocolo mediante tonos DTMF para la comunicación entre los dos sistemas usando un simple circuito telefónico o un canal de audio de un PCM. La inmunidad contra el ruido y la fiabilidad de los tonos DTMF lo hace una variante muy sólida para aplicaciones de baja capacidad y poca velocidad.. 1.4 Los microcontroladores PICs. El 16F73. En los últimos tiempos los microcontroladores ha revolucionado el mundo de las aplicaciones electrónicas. Dada su facilidad de uso, programación e integración se han convertido en una potente herramienta de control. En este apartado daremos breves características de los mismos así como del PIC que nos ocupa.. 1.4.1 Los microcontroladores PICs. Explicado mediante términos sencillos, podemos definir a un microcontrolador como un circuito integrado (conocido como chip) que incluye en su interior las tres unidades funcionales de una computadora: CPU, memoria y unidades de E/S, es decir, se trata de una computadora completa en un solo circuito integrado. Aunque sus prestaciones son limitadas si las comparamos con las de cualquier ordenador personal, además de dicha integración, su característica principal es su alto nivel de especialización (Palazzesi 2006). La figura 1.2 nos muestra el primer micro que salió al mercado.. - 9 -.
(21) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Fig. 1.2: El Intel 4004, primer microprocesador (Palazzesi 2006).. Los 'PIC' son una familia de microcontroladores tipo RISC (del inglés: Reduced Instruction Set Computer), fabricados por Microchip Technology Inc. y derivados del PIC1650, originalmente desarrollado por la división de microelectrónica de General Instruments (Wikipedia 2008). Esta familia, desarrollada por la casa Microchip, se divide en cuatro gamas, enana, baja, media y alta. Las principales diferencias entre estas gamas radica en el número de instrucciones y su longitud, el número de puertos y funciones, lo cual se refleja en el encapsulado, la complejidad interna y de programación, y en el número de aplicaciones.. Fig. 1. 3: Microcontroladores PIC de la Microchip (Palazzesi 2006).. Los PICs actuales vienen con una amplia gama de mejoras de hardware incorporadas:. - 10 -.
(22) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. 1. Núcleos de CPU (del inglés: Central Unit of Process) de 8/16 bits con Arquitectura Harvard modificada. 2. Memoria Flash y ROM disponible desde 256 bytes a 256 Kbytes. 3. Puertos de E/S (típicamente 0 a 5,5 V). 4. Temporizadores de 8/16 bits. 5. Tecnología Nanowatt para modos de control de energía. 6. Periféricos serie sincrónicos y asincrónicos: USART, AUSART, EUSART. 7. Conversores analógico/digital de 8 -10 -12 bits. 8. Comparadores de tensión. 9. Módulos de captura y comparación PWM. 10. Controladores LCD. 11. Periférico MSSP para comunicaciones I2C, SPI, e I2S. 12. Memoria EEPROM interna con duración de hasta un millón de ciclos de lectura/escritura. 13. Periféricos de control de motores. 14. Soporte de interfaz USB. 15. Soporte de controlador Ethernet. 16. Soporte de controlador Irda. (Castro and Galdo 2007) Precisamente esta amplia gama de subsistemas, sumado a la plasticidad, la enorme cantidad de información sobre el tema y bajos precios hace que los microcontroladores PICs sean candidatos de alto valor para el desarrollo de aplicaciones como las que nos proponemos. La división en distintas gamas hace que la selección de un PIC sea lo más ajustable posible a nuestras necesidades, evitando así usar un chip más potente de lo que en realidad necesitamos, y no invertir dinero en recursos que no nos interesan.. - 11 -.
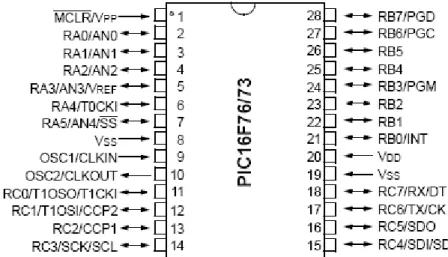
(23) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. 1.4.2. El 16F73. Teniendo en cuenta las consideraciones anteriores, un PIC de la gama media nos resultará suficiente. Es la gama más variada y completa de los PIC. Abarca modelos con encapsulados de 18 pines hasta 68, cubriendo varias opciones que integran abundantes periféricos. El repertorio cuenta con 35 instrucciones de 14 bits cada una y compatible con la gama baja. Sus distintos modelos contienen todos los recursos que se precisan en las aplicaciones de lo microcontroladores de 8 bits. También dispone hasta de 11 fuentes de interrupciones internas y externas y una pila de 8 niveles que permiten el anidamiento de subrutinas (Castro and Galdo 2007). De esta gama disponemos del PIC 16F73 que se ajusta a nuestros requerimientos. Veamos primero su diagrama de pines que se muestra en la figura 1.4 (Microchip 2002) para luego detallar brevemente las características que nos interesan.. Fig. 1.4: Diagrama de Pines (Microchip 2002).. Las características principales que nos interesan son:. - 12 -.
(24) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. • Memoria de Programa tipo Flash 8 K x 14 bits). 1 TP. PT. • Memoria Datos (RAM) 192 bytes • Soporta hasta 20 MHz de oscilador de cristal. • Voltaje de Operación: 2,0 hasta 5,5 V DC. (Microchip 2003). • 3 Puertos: Puerto A con 6 bits y Puerto B y C de 8 bits. • 28 pines de encapsulado DIP. Los periféricos que nos interesan son: • Timer 0: 8 bits timer/counter, con pre-escalador de 8 bits. • Conversor analógico/digital de 8 bits por 8 canales.. 1.5 Descripción y diagrama en bloque del dispositivo. Distribución de los puertos del PIC. Como ya introducimos el componente de control, consideramos entonces necesario ir especificando cómo luciría nuestro dispositivo. No es objetivo de este apartado profundizar en la electrónica, sino a nivel de diagramas en bloques e ir sentando las bases sobre las que trabajará la programación. En apartados posteriores se hará un acercamiento a los componentes a utilizar. El primer paso sería la captura de datos, tanto de voltajes como de los eventos on/off que define las alarmas. Para ello tenemos una tarjeta implementada y desarrollada por los compañeros del departamento de Tecnología y Software de la Dirección Territorial de ETECSA en Sancti-Spíritus, el ESTIL@E (Equipo de Supervisión y Transferencia de Información con Línea de Arquitectura Escalar) y en estos momentos forma parte del sistema de supervisión de alarmas, recogiendo los tonos DTMF que se generan en los centros no atendidos. Está conformado por un arreglo de 5 multiplexores CD4051. En la siguiente figura se muestra un esquema de dicho dispositivo.. 1 TP. PT. Por considerarse modelo de desarrollo o prototipo. Para el modelo de expansión la Microchip. comercializa la versión OTP (del inglés: One Time Programmable) que sería el 16C73A.. - 13 -.
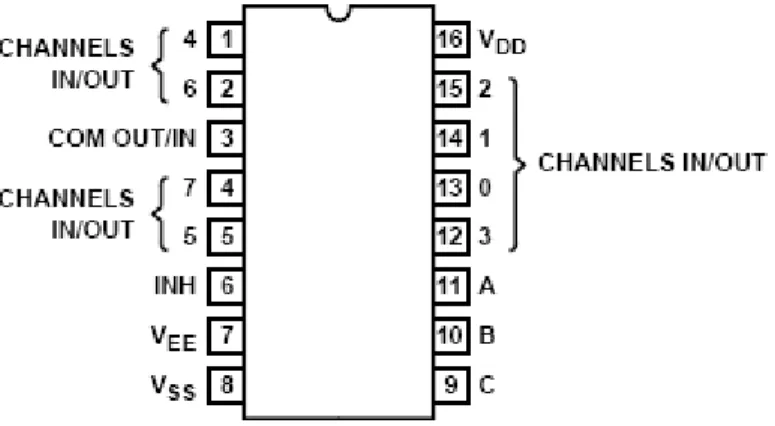
(25) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Fig. 1.5: Tableta de Multiplexores ESTIL@E.. El CD4051 es un multiplexor/demultiplexor de 8 canales con 3 entradas de control binarias A, B y C, y una entrada de inhibición INH (figura 1.7). Las 3 entradas binarias de control seleccionan uno de los ocho canales que pueden ser de entrada o salida. Puede manejar señales analógicas hasta de 20 V P-P y señales digitales desde 4,5 V hasta 20 V (Si VDD-VSS = 3 V, entonces VDDVEE puede llegar hasta 13 V puede ser controlado; para VDD-VEE de niveles mayores a 13 V, a VDD-VSS requiere de al menos 4,5 V) (Instrument 2000).. - 14 -.
(26) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Fig. 1.6: multiplexor/demultiplexor CD4051 (Instrument 2000).. El ESTIL@E, necesita 3 bits de control (A, B y C) los cuales seleccionan simultáneamente los canales en los 5 multiplexores CD4051. Los bits 0, 1 y 2 del Puerto C dado que los subsistemas que atienden no nos son útiles, ocuparán esta tarea. Las 5 salidas de los multiplexores serán las entradas de datos al PIC. Debido a la configuración de hardware podemos conmutar datos tanto analógicos como digitales, podemos tributarlos a los 5 primeros bits del Puerto A, ya que estos pueden ser utilizados como conversores A/D. Digamos entonces que en un primer barrido (con dirección ABC = ‘000’) los 5 bits del Puerto A pueden estar listas para medir voltajes de forma independiente y el resto de los barridos podrán atender entradas lógicas. Así podremos censar hasta 35 eventos on/off y 5 niveles de voltaje. Previendo que los sensores sean activos tanto en ‘0’ como en ‘1’ el programa deberá detectar los cambios de estado. Esto hará escueta la información y flexible a la hora de tomar determinaciones. Ya al programa o al operador que están al extremo le corresponderán determinar qué significa que la alarma ‘X’ cambie de un determinado estado a otro. Con los voltajes entonces se fijaran niveles “críticos” que de ser alcanzados se enviará el reporte. Para la transmisión se empleará una MT8885, que es un transmisor/receptor de DTMF, con el objetivo de tener una comunicación semiduplex.. - 15 -.
(27) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Podemos encontrar también una variante de bajo voltaje de alimentación, de 2.7 V a 3,6 V, la MT88L85 (Mitel 1995) cuyas características, exceptuando algunos rangos eléctricos, son idénticas a la MT8885, que tiene como voltaje de suministro 5 V. La sección receptora de la TM8885 está basada en el estándar para la MT8870 (Mitel 1995) y la transmisora utiliza un convertidor D/A de capacitor conmutado para baja distorsión (Mitel 1995).. Fig. 1.7: MT8885 en las dos Variantes de Empaquetamiento (Mitel 1995).. Cuenta con un bus de datos de entra/salida de 4 bit para los 16 valores de DTMF y acceso a los registros de control y datos. Posee una interfaz de adaptación con microprocesadores que puede trabajar en modo Motorola o Intel. Esta se maneja de la forma en que tomemos los pines, pues el PIC puede emular cualquiera de las dos. Hemos decidido trabajar con la configuración para Motorota. Para ello el chip cuenta con 6 bits de control (Mitel 1995). PWDN se ponen a tierra para tener el Chip “encendido” todo el tiempo, liberándolo del PIC y dejando en 5 bits a controlar. • R/W*: Lectura/Escritura. • DS: Data Strobe • IRQ*: Interrupt Request • RS0: Register Select. - 16 -.
(28) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. • CS*: Chip Selet Así nos quedan 8 bits para la MT8885 (que en este caso funcionará como un Modem) que con el Puerto B podemos atender. Concluimos que los pines son distribuidos: •. PORTC (0, 1, 2) Control A, B, y C en los multiplexores.. •. PORTA (0, 1, 2, 3, 4) Entradas de datos.. •. PORTA (5) CS* de la MT8885. •. PORTB y Bus de datos y control del codificador/decodificador DTMF. MT8885 donde: o PORTB (1, 2, 3, 4) Bus de datos.. Fig. 1.8: Diagrama en bloques del dispositivo.. 1.6 Periféricos. Hasta el momento nos hemos preocupados por los principales sistemas a desarrollar en el SISAP, pero debemos contar con algunos periféricos que. - 17 -.
(29) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. garantizarán que nuestros objetivos sean alcanzados. No es nuestro objetivo explicar su funcionamiento. Solo dedicaremos un pequeño apartado a comentar su función y montaje.. 1.6.1 El Bus I2C. El reloj DS1307 y las memorias 24LC256. El bus I2C se ha convertido en uno de los módulos más utilizados para la comunicación entre las componentes de un circuito. Hoy en día lo encontramos en casi toda la electrónica, que va desde los equipos de uso doméstico como los televisores hasta en equipos para ambientes industriales. Es un bus de comunicaciones serie. Su nombre viene del ingles Inter-Integrated Circuit. La versión 1.0 data del año 1992 y la versión 2.1 del año 2000, su diseñador es Philips. La velocidad es de 100 Kbits/s en el modo estándar, aunque también permite velocidades de 3,4 Mbit/s. Es un bus muy usado en la industria, principalmente para comunicar microcontroladores y sus periféricos en sistemas empotrados (del ingles Embedded Systems) y generalizando más para comunicar circuitos integrados entre si que normalmente residen en un mismo circuito impreso. Las líneas se llaman: • SDA: datos • SCL: reloj • GND: Tierra.. Las dos primeras líneas son drenador abierto, por lo que necesitan resistencias de pull-up (conectada a VCC) (Wikipedia 2008). Fig. 1.9: Forma de conexión del bus I2C (Wikipedia 2008).. - 18 -.
(30) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. Sus principales características que lo hecho popular son: • Se necesitan solamente dos líneas, la de datos (SDA) y la de reloj (SCL). • Cada. dispositivo conectado al bus tiene un código de dirección. seleccionable mediante software. Habiendo permanentemente una relación Master/ Slave entre el micro y los dispositivos conectados • El bus permite la conexión de varios Masters, ya que incluye un detector de. colisiones. • El protocolo de transferencia de datos y direcciones posibilita diseñar. sistemas completamente definidos por software. • Los datos y direcciones se transmiten con palabras de 8 bits.. (Coquet 2007) T. T. El bus I2C es atendido por los pines 3 y 4 del Puerto C del PIC (SCL y SDA respectivamente). El 16F73 cuenta con un módulo I2C, que trabaja como esclavo, por lo que fue necesario generar mediante software el protocolo para Master. Los periféricos que atenderemos serán un reloj de tiempo real y una memoria 24LC256 Obtendremos la hora mediante el reloj de tiempo real DS1307 (Semiconductor 2007). Fig. 1.10: Reloj de tiempo real DS1307 en sus dos formas de empaquetamiento (Semiconductor 2007).. El DS1307 es capaz de contar los segundos, los minutos, la hora, el día, el día de la semana, el mes y el año que se incrementa hasta el 2100. Como forma primaria de energía se alimenta con +5 V (entre VCC y GND) y puede conectársele una batería de Litio de respaldo de 3 V. Su consumo no. - 19 -.
(31) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. supera los 1,5 mA por lo que su carga es despreciable para el resto del circuito y una batería en buen estado mantendría al menos 10 años el conteo. Para guardar la información antes de transmitirla contamos con la memoria 24LC256.. Fig.1.11: Memoria EEPROM 24XX256 en sus variantes de empaquetamiento PDIP y SOIC (Microchip 1998).. La 24LC256 es una memoria CMOS EEPROM de 32 K X 8 bits (256K). Su voltaje de operación (VCC) va desde 2,5 V a 5,5 V por lo que se puede usar en aplicaciones avanzadas, desde comunicación personal hasta adquisición de datos (Microchip 1998). La corriente máxima en la escritura es de 3 mA y la de lectura de 400 µA, siendo de bajo consumo (Microchip 1998). Su frecuencia máxima de reloj es de 400 kHz (Microchip 1998).. 1.6.2 Display. Al dispositivo se le ha incorporado un display con interfaz paralelo de los utilizados en los teléfonos públicos, el SD1602H (Samsung 1999), para poder visualizar las respuestas a los distintos eventos que se generan y el microcontrolador debe atender. Con un consumo menor de 5 mA no constituye una carga apreciable al circuito y compartirá todo el Puerto B con la MT8885 para el bus de datos. El pin RC5 atenderá la habilitación del circuito integrado y RC0 compartirá función para el pin de control RS. El pin R/W* irá a tierra ya que solo se escribirá en el display.. - 20 -.
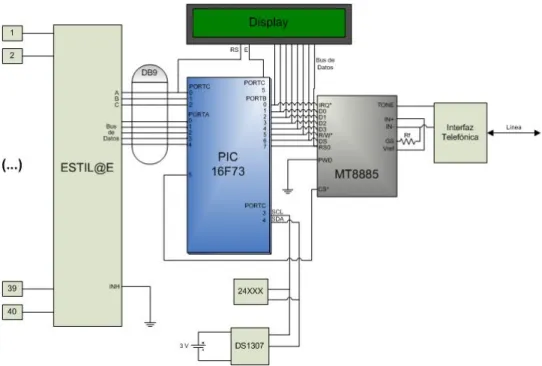
(32) Capítulo I El Actual Sistema de Supervisión de Alarmas. Variante Tecnológica.. 1.7 Esquema General Hasta ahora hemos descrito las componentes principales y subsistemas que emplearemos en nuestro dispositivo. La figura 1.13 presenta un diagrama general del SISAP en el que se ha omitido la electrónica de apoyo.. Fig. 1.12: Diagrama general del SISAP.. Nótese en este esquema que, ni el ESTI@E, ni la interfaz telefónica se incluyen dentro del PCB de nuestro dispositivo; en este esquema sólo se representan los 2 sistemas con lo que tiene que interactuar, tanto para censo como para la transmisión.. - 21 -.
(33) Capítulo II. - 22 -.
(34) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. Capítulo II Descripción de algoritmo y software. Esquemas de hardware. En este capítulo se describe el algoritmo y software generado a raíz de la problemática descrita en el capítulo anterior, teniendo en cuenta las consideraciones de dispositivos y hardware analizados. Pretendemos darle inteligencia al sistema actual. Está distribuido en subsistemas que serán integrados en el “main” y tendrán como base el esquema circuital que se irá analizando previamente. Debemos aclarar que en este capítulo sólo se hace referencia a la estructura que deberá seguir el hardware. Para su confección, compilación y emulación se utiliza la. herramienta de. programación MPLAB IDE 7.5 de Microchip (Microchip 2006). y para la emulación del hardware se utilizó uno de los paquetes de Labcenter, el Proteus 7.2, específicamente la herramienta Isis (Labcenter 2007). Con este software se logra una validación de los resultados evitando pérdidas de tiempo y componentes en el montaje final.. 2.1 Ciclo de adquisición de datos. La primera función que debe hacer nuestro dispositivo es el censo eficiente de todos los datos que debe controlar. La pérdida o falseo de dichos datos atentarían directamente contra la fidelidad del equipo, la seguridad y estabilidad de los dispositivos y centros de telecomunicaciones supervisados. Sobre la base de las posibilidades que nos ofrecen, tanto el PIC, como los multiplexores con los cuales vamos a capturar y medir al menos 3 tipos de voltajes y censar 35 alarmas del tipo “booleanas”. En este apartado describiremos las características del ciclo de muestreo. Comenzaremos partiendo de su estructura de hardware, para luego hablar del software que lo controla.. - 23 -.
(35) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. 2.1.1 Estructura de hardware. Disponemos de un una tableta de 5 multiplexores CD 4051 que conmutan datos tanto analógicos hasta 20 V (que en este caso sólo utilizaremos hasta 5 V), como digitales. En la figura 2.1 se muestra el modelo en la herramienta de simulación Isis. (Instrument 2000). U1 13 14 15 12 1 5 2 4 11 10 9 6. X0 X1 X2 X3 X4 X5 X6 X7. X. 3. A B C INH 4051. Fig. 2.1: Modelo de CD 4051 en el Isis.. En el caso que nos ocupa tomamos de entrada desde X0 a X7 de cada CD4051, teniendo entonces 40 posibles datos de entrada que irán pasando a la salida de 5 en 5; uno por cada ciclo de multiplexado, que tributarán al PIC desde el bit X del multiplexor, hasta llegar así a 8 ciclos y haber procesado los 40 datos. Emplearemos entonces 5 bits de uno de los puertos del PIC para entrar los datos a leer de cada uno de los multiplexores y 3 para control, para un total de 8 bits. Con esta estructura entonces podemos generar un barrido de datos que nos permita cubrir todas nuestras necesidades. Una primera captura será de voltajes (datos analógicos) para medirlos y las restantes entonces serán alarmas (datos digitales).. - 24 -.
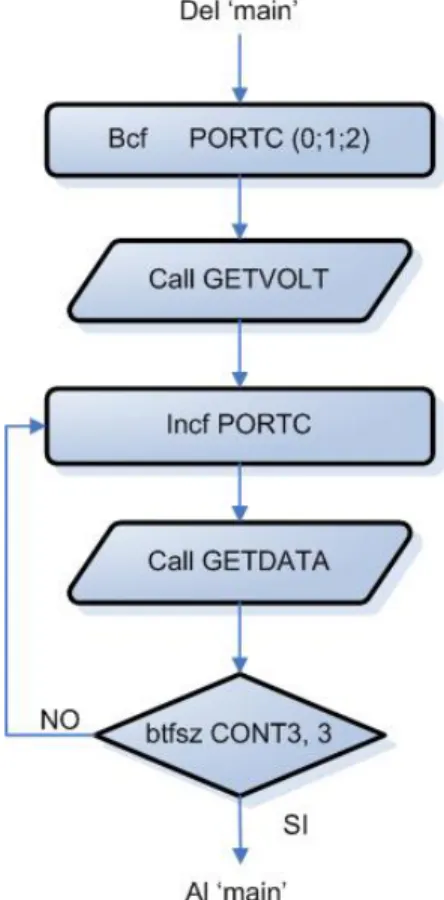
(36) Descripción de Algoritmo y Software. Esquema de Hardware. Capítulo II. 13 14 15 12 1 5 2 4 11 10 9 6. 13 14 15 12 1 5 2 4 11 10 9 6. 13 14 15 12 1 5 2 4 11 10 9 6. 13 14 15 12 1 5 2 4 11 10 9 6. 13 14 15 12 1 5 2 4 11 10 9 6. X. X. X. X. X. 3. 3. 3. 3. 3. 9 10 1. 2 3 4 5 6 7. U1 OSC1/CLKIN OSC2/CLKOUT MCLR/Vpp. RA0/AN0 RA1/AN1 RA2/AN2 RA3/AN3/VREF+ RA4/T0CKI RA5/AN4/SS. PIC16C73B. RB0/INT RB1 RB2 RB3 RB4 RB5 RB6 RB7 RC0/T1OSO/T1CKI RC1/T1OSI/CCP2 RC2/CCP1 RC3/SCK/SCL RC4/SDI/SDA RC5/SDO RC6/TX/CK RC7/RX/DT. 21 22 23 24 25 26 27 28 11 12 13 14 15 16 17 18. por los bits de selección del Puerto C.. Tabla 2.1: Tabla de verdad del multiplexor CD4051B.. - 25 -. U2 X0 X1 X2 X3 X4 X5 X6 X7 A B C INH 4051. U3 X0 X1 X2 X3 X4 X5 X6 X7 A B C INH 4051. U4 X0 X1 X2 X3 X4 X5 X6 X7 A B C INH 4051. U5 X0 X1 X2 X3 X4 X5 X6 X7 A B C INH 4051. U6 X0 X1 X2 X3 X4 X5 X6 X7 A B C INH 4051. Fig. 2.2: Esquema en Isis.. 2.1.2 Estructura de software.. Teniendo en cuenta la tabla de verdad de los multiplexores facilitada por el fabricante (Instrument 2000), debemos generar una secuencia de ‘000’ a ‘111’.
(37) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. Los CD4051 alimentados con 5 V de corriente directa (CD) tienen un retardo máximo de entrada a salida de 60 ns. Si tenemos en cuenta que el reloj del PIC oscila a 4 MHz, para un ciclo de máquina de 1 µs,. entonces es más que. suficiente la demora entre una instrucción y otra para que se estabilicen las señales en la salida de los multiplexores. Como se refirió anteriormente el primer ciclo de multiplexado será para medir los voltajes, que corresponde a la salida ‘000’. Una subrutina independiente, GETVOLT, atenderá dicha captura de cada uno de los pines.. Fig. 2.3: Segmento de Captura de Datos.. 2.1.3 Captura y medición de voltajes: GETVOLT. Esta subrutina es el eje de todo el ciclo de captura y medición de voltajes. Cuenta con que previamente se halla seleccionado desde el ‘main’ la primera entrada de cada multiplexor, o sea, ‘000’ en ABC.. - 26 -.
(38) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. Al inicio se limpia el registro ADCON1, lo que implica que todas las entradas del Puerto A pasan a ser analógicas. En el cuerpo de esta subrutina básicamente se censa los bits 0, 1 y 2 del registro FLAG, que indican en ‘1’ medir el voltaje del pin 0, 1 ó 2 del Puerto A. Pueden ser medidos la cantidad de voltajes que se indiquen activos en el registro FLAG. FLAG se podrá configurar por el operario. Cada vez que GETVOLT encuentre un bit activo, llamará a la subrutina SETVOLT. La subrutina SETVOLT. se encarga entonces de medir el voltaje en el pin. seleccionado y determinar el valor en una escala de 0 al 5 V. Estas cifras serán dispuestas en 2 registros habilitados al efecto para cada voltaje medido.. VUNI1. equ. 0xCC. VCET1. equ. 0xCD. VUNI2. equ. 0xCE. VCET2. equ. 0xCF. VUNI3. equ. 0xD0. VCET3. equ. 0xD1. Donde en los VUNIX irán las unidades de Volt antes de la coma y en los VCETX, las dos cifras significativas después de la coma, quedando así:. VUNIX, VCETX Al activar GO/DONE, el CAD (Convertidor análogo/digital) deja en registro ADRES el valor recogido en 8 bits. 8 bits representan valores entre 0 y 28-1 o sea entre 0 y 255 pasos. Si dividimos el voltaje de referencia VDD igual a 5 V dará que valor tiene un paso.. - 27 -.
(39) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. 5 000 mV / 255 = 19,61 mV Que se puede aproximar 20 mV con el fin de obtener un valor entero. O sea, para que fuera exacto 20 mV la referencia estaría en 5,1 V. Con 20 mV de paso entonces cada unidad de Volt será. 1 000 mV / 20 mV = 50 pasos Entonces la búsqueda de las unidades de volt se limita a incrementar en 50 un registro creado (UNI) al menos 4 veces, hasta que el número resultante sea mayor que la referencia en ADRES. Si se incrementa hasta 200 y aún es mayor entonces será automáticamente 5 en las unidades, no sólo por que sea hasta 5 V, sino porque 50 * 5 = 250, apenas 5 pasos antes del límite de 255 que presuponen 8 bits. Este proceso por sí sólo constituye una validación de las unidades. Estas serán devueltas al registro correspondiente VUNIX. En cuanto a las cifras que están después de la coma, si tenemos en cuenta que al trabajar con números binarios, entonces la multiplicación por 2 es tan simple como rotar a la izquierda el número dado, o sea, agregar un ‘0’ en el bit menos significativo. Entones empecemos con restarle al número original de ADRES todas las unidades de volt, que en pasos se traducen en 50 * UNI, donde UNI es el registro don están las unidades. Bastará sólo con restarle 50 al último valor incrementado para lograr la comparación.. ADRES – (50 * UNI) = DDC Sea DDC las décimas y centésimas después de la coma en términos de voltajes. Ahora, con una simple rotación a la izquierda haremos que la resolución del CAD se multiplique por 2 haciendo que el tamaño del paso decrezca de 20 mV a 10 mV, Con esta operación logramos la centésima coincida con 1, aunque como el bit menos significativo del valor. binario siempre será ‘0’, seguirá. - 28 -.
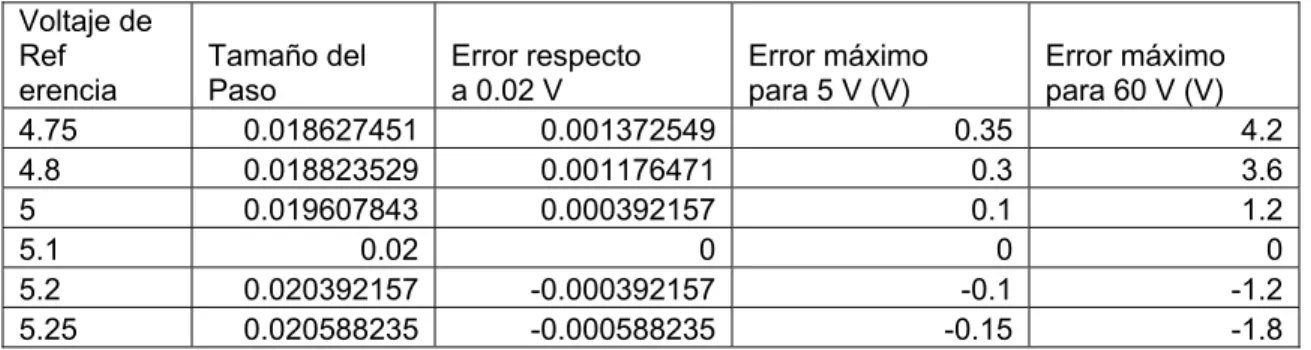
(40) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. creciendo el paso de 20 mV en 20 mV, pero nos queda DDC un número de 0 a 98 que coincide con los valores después de la coma, o sea, de ‘0, 000’ a ‘0, 980’. Este número será puesto en la dirección correspondiente a VCETX. Si tenemos en cuenta que la referencia que va a usar el CAD es el voltaje de alimentación VDD (D’Souza 2005), que proviene de un regulador integrado 7805, tenemos que observar cuáles son los rangos de salida que este puede dar. Su fabricante nos dice:. Tabla 2.2 Rangos de salida del 7805 (Semiconductors 2001).. Para lo cual calculamos los errores para los puntos señalados. Voltaje de Ref erencia 4.75 4.8 5 5.1 5.2 5.25. Tamaño del Paso 0.018627451 0.018823529 0.019607843 0.02 0.020392157 0.020588235. Error respecto a 0.02 V 0.001372549 0.001176471 0.000392157 0 -0.000392157 -0.000588235. Error máximo para 5 V (V). Error máximo para 60 V (V) 0.35 0.3 0.1 0 -0.1 -0.15. 4.2 3.6 1.2 0 -1.2 -1.8. Tabla 2.3: Error en la medición respecto al paso de 0.02 V.. Este error es descrito en la literatura como “error de ganancia” (Bowling 2000). En niveles bajos, cercanos a la referencia, este error no es tan dañino para este tipo específico de aplicación que no necesita de datos tan precisos. En nuestro caso el voltaje es demasiado alto (próximo a 60 V) para una resolución de apenas 8 bits y como la tabla indica el error se hace bastante crítico. Necesitamos una referencia externa estable (Cox 1997).. - 29 -.
(41) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. El pin 3 del Puerto A es el empleado para poner la referencia de voltaje del CAD (Sumit Mitra, Stan D’Souza et al. 1997). Al ser esta entrada conmutada para la captura de datos, la referencia vendrá del ESTIL@E. En el Capítulo 3 abordará con más detalle el tema.. 2.1.4 Captura y comparación de alarmas: GETDATA. Esta subrutina cuenta con que los datos que entran al multiplexor ya están previamente seleccionados. Los datos irán siendo situados por orden de llegada en los registros:. DATA1. equ. 0xAC. DATA2. equ. 0xAD. DATA3. equ. 0xAE. DATA4. equ. 0xAF. DATA5. equ. 0xB0. DATA6. equ. 0xB1. DATA7. equ. 0xB2. Cada registro guardará los 5 bits de estado de las alarmas que tributan los multiplexores en los 5 bits menos significativos. Los 3 bits restantes no tienen uso aún. Las alarmas entonces comenzarán a enumerarse por el bit ‘0’ del registro DATA1 que corresponde al estado de la alarma ‘01’, hasta el bit 4 del registro DATA7 que corresponde al estado la alarma ‘35’. Recordemos que el primer ciclo de multiplexado correspondió a los voltajes por lo tanto debemos tener en cuenta que aún quedan los 2 bits más significativos sin uso del primer ciclo.. Fig. 2.4: Formato de los registros DATAX. - 30 -.
(42) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. El hecho de sólo registrar los estados hace escueto pero flexible el sistema ya que indistintamente una alarma puede estar activa, pongamos el ejemplo de una puerta abierta, tanto en ‘1’ como ’0’, en dependencia del censor que la atienda. Ya le corresponderá a al operador conocer y configurar en el extremo, donde serán enviados los datos, qué significa que una determinada alarma cambie de un estado a otro. Volviendo a la subrutina, un contador CONT1, será el encargado de que los datos sean situados en orden en sus respectivos registros. Después de la captura del Puerto A, los 5 bits son comparados con la referencia, o sea con los de la anterior captura del registro correspondiente. Si son iguales, simplemente se sale. Si no, se “resaltan” cuáles bits cambiaron de ‘0’ a ‘1’ y/o cuáles de ‘1’ a ‘0’ en los registro OTOI y/o ITOO respectivamente. Estos registros constituyen la entrada de la subrutina DONDE que es la que determina cuál es la posición del cambio y por consiguiente, la alarma que ha cambiado. El cómo cambió simplemente está precisado en cuál de los 2 registros (OTOI y/o ITOO) se está determinando la posición del cambio. Al determinar dónde está cada uno de los cambios, dentro de DONDE, está anidada otra subrutina, REPOI, que es la que sitúa la información sobre los cambios ya lista para transmitir a partir de la posición 0x24 del Banco 0 del PIC. Será reservada entonces a partir de esta posición 35 bytes, para un hipotético, aunque caso muy poco probable, en el que cambien todas en un mismo lazo. El byte contendrá en los bits menos significativos el número de la alarma correspondiente. Estos pueden ser hasta el 40, en binario ‘101000’, ocupando sólo hasta el bit 5. En el más significativo se refleja el cambio que hizo; de ‘0’ a ‘1’, el bit EA estará a ‘1’, de ‘1’ a ‘0’, el bit EA estará a ‘0’.. Fig. 2.5: Formato de Datos.. - 31 -.
(43) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. Se creó un puntero, el FSCON1, que guardará la información de cuántos datos han sido detectados como cambios. Antes de salir de cada llamada de GETDATA se refrescará de ser necesario (si hubo cambios) el registro DATAX procesado. Para resumir, GETDATA recoge los datos digitales que están en el Puerto A, a las salidas de los multiplexores, que están previamente seleccionados. Las secuencias, de 5 en 5 son tomadas, comparadas y detectados los cambios, si hubo. Estos cambios son puestos a partir de la posición 0x24 listos para informar.. Fig. 2.6: Subrutina GETDATA.. - 32 -.
(44) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. 2.2 Comunicación con el exterior. En este apartado comentaremos sobre la forma solicitada en que se comunicará el dispositivo con el exterior, que será a través de un canal de audio. La comunicación es bidireccional, asincrónica y orientada a conexión. Los datos son codificados/decodificados en tonos DTMF para su envío usando la MT8885 como “modem”. Al utilizar una línea dedicada ya estamos identificando el dispositivo con la línea y no necesitamos seriarlos. Como un teléfono común, este adquiriría el número de la línea asignada. Describiremos el protocolo que debe seguir el dispositivo y el extremo propuesto, para lograr una comunicación segura. Haremos una breve descripción de la estructura del hardware y en función de ella describiremos el software en el PIC.. 2.2.1 Protocolo de comunicación. La transmisión en cualquiera de los dos sentidos describirá un protocolo que comenzará invariablemente con un ‘*’, que significa que una petición de atención. El extremo que la reciba deberá limpiar su buffer de recepción, no importa qué tenga hasta ese momento y ponerse en modo de escucha hasta que la cadena que se recibe llegue al final, lo que evitará falseo en datos, procesamiento de datos incompletos. Un ‘*’ implicará en cualquier caso un reseteo. Luego del ‘*’ se esperará la confirmación de atención u “OK”. Al llegar la confirmación de atención es enviado el mensaje completo que puede contener tanto datos como comandos y un fin de cadena. El extremo responderá con un ‘*’ y una suma chequeo en 3 tonos, seguida de un cierre de cadena. Un ‘#’ identificará que se va a enviar un evento. El dígito que venga precedido del caracter ‘#’ identificará el evento que se ha transmitido o solicitado. Para sistema decimal hay del 0 al 9 dígitos y A a la F, entonces podremos explotar hasta 16 tipos de eventos. Hasta ahora hemos definido. - 33 -.
(45) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. • #0 Fin de Cadena. • #1 Comprobación de Línea. • #2 Voltajes de Batería. • #3 Alarmas on/off. • #4 Hora del Evento • #A Suma Chequeo. • #B Error. • #C Reenvío. • #D OK Cada tipo de evento tiene una determinada secuencia de datos que se irá comprobando a medida que estos arriben. De no concordar un caracter con su secuencia correspondiente será desechada la cadena y será enviado un aviso de ‘error’ seguido de una petición de reenvío. A continuación daremos una descripción de cada evento: Fin de Cadena (#0): No tiene secuencia. Después de este evento la cadena anterior está completa y se puede procesar. Comprobación de Línea (#1): No tiene secuencia. Es un comando que ejecuta el “Extremo” periódicamente para comprobar que un prolongado silencio no es consecuencia de una desconexión o desperfecto en el canal. La respuesta será implícita en el eco esperado por cada caracter. De no recibir este eco se activará la alarma correspondiente. La comprobación de línea por defecto se realza cada 30 minutos; el operario puede programarla hasta 1 hora. Voltaje de Batería (#2): El voltaje vendrá en 4 dígitos, 2 para decimales y 2 para fracciones decimales. Pasados los 4 dígitos, la llegada de uno nuevo implicará un nuevo voltaje que se está enviando. Este evento solo admite dígitos y un ‘#’ pasados 4. Alarmas on/off (#3:) Las Alarmas vendrán en 3 dígitos. El primero indicará el estado al que se pasó, ‘0’ ó ‘1’, y los 2 restantes el número de la Alarma que. - 34 -.
(46) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. cambió. Este evento sólo admite los dígitos ‘0’ o ‘1’ en su prima parte, dígitos en los 2 siguientes y un ‘#’ pasados 3. Hora del Evento (#4): La hora vendrá en 4 dígitos, los 2 primeros para la hora, y los 2 restantes para los minutos. Este secuencia solo admite los dígitos ‘0’ o ‘1’ y un # después de 4 caracteres. Error (#B): No tiene secuencia. Este evento se activará siempre que el eco no corresponda o arribe un caracter que no sea consecuente. Irá antecedido de un ‘*’ el cual será recibido por el caracter. de eco, e implicará un alto en la. transmisión y anulación de la misma, para ponerse en escucha. Normalmente se envía entonces un Reenvío (#C). Reenvío (#C): No tiene secuencia. Este evento puede preceder a Error (#B). Es una petición de reenvío. OK (#D): No tiene secuencia. Es una confirmación de atención. Suma Chequeo (#A): Contiene la suma de todos los caracteres enviados en 3 caracteres y se lee como un decimal, o sea, desde 000 hasta 999. La exhaustiva validación de todos los caracteres que arriban hace que el sistema sea robusto y fiable y que la probabilidad de errores en los datos cuando la cadena esté completa es muy baja. La MT8885 se configura en modo de ráfaga para transmitir. De esta forma se transmite un caracter cada 50 ms. Una ráfaga típica contiene: •. La o las alarmas que cambiaron.. •. El o los voltajes de batería.. •. Hora en que ocurrieron los eventos.. •. Suma chequeo.. •. Fin de cadena.. Fig. 2.7: Esquema de una secuencia. - 35 -.
(47) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. La MT8885 se configura en modo de ráfaga para transmitir. De esta forma se envía un caracter cada 50 ms. Suponiendo 2 alarmas activas y un voltaje, una trama típica contiene 31 caracteres, a 50 ms, puede durar aproximadamente 1 550 ms. 2.2.2 Estructura de Hardware. El Puerto B del PIC será el encargado de controlar y transferir los datos con MT8885. Cuando este dispositivo recibe o transmite un dato válido, el pin IRQ* se pone a ‘0’ por lo que se puede atender por interrupción, conectando directamente al pin RB0 del PIC. Los pines restantes se distribuyen: • Bus de datos: (1:4) • R/W*: (5) • DS: (6) • RS0(7) CS* será atendido por el pin 5 del Puerto A. El pin PWD estará puesto a ‘0’ para que el chip este “encendido” constantemente.. Fig. 2.8: Configuración para la Transmisión/Recepción.. - 36 -.
(48) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. Debido a que el Isis no contiene en sus librerías la MT8885, realizamos un programa en otro PIC para que emule la respuesta de dicha componente, descrita de forma explícita en el datasheet (Mitel 1995) y así poder tener una visión más clara del resultado final antes de la puesta en marcha del dispositivo. En esta nueva componente el Puerto B asumirá tanto las señales de datos como las de control; los bits del ‘0’ al ‘3’ serán los de datos, los restantes de control, incluido el pin CS*, en el pin 1 del Puerto C. En la figura 2.9 que muestra el esquema para la simulación en Isis se ha incluido además un tercer PIC, un 16F877, que simulará la respuesta del extremo y cuenta con un display donde se imprimirán la cadena de caracteres recibida. LCD1. RS RW E. D0 D1 D2 D3 D4 D5 D6 D7 7 8 9 10 11 12 13 14. 4 5 6. 1 2 3. VSS VDD VEE. LM016L. EXTREMO. CANAL CONTROL 9 10 1 2 3 4 5 6 7. OSC1/CLKIN OSC2/CLKOUT MCLR/Vpp. RB0/INT RB1 RB2 RB3 RB4 RB5 RB6 RB7. RA0/AN0 RA1/AN1 RA2/AN2 RA3/AN3/VREF+ RA4/T0CKI RA5/AN4/SS RC0/T1OSO/T1CKI RC1/T1OSI/CCP2 RC2/CCP1 RC3/SCK/SCL RC4/SDI/SDA RC5/SDO RC6/TX/CK RC7/RX/DT. 21 22 23 24 25 26 27 28 11 12 13 14 15 16 17 18. 21 22 23 24 25 26 27 28 11 12 13 14 15 16 17 18. RB0/INT RB1 RB2 RB3 RB4 RB5 RB6 RB7. OSC1/CLKIN OSC2/CLKOUT MCLR/Vpp. RA0/AN0 RA1/AN1 RA2/AN2 RA3/AN3/VREF+ RA4/T0CKI RC0/T1OSO/T1CKI RA5/AN4/SS RC1/T1OSI/CCP2 RC2/CCP1 RC3/SCK/SCL RC4/SDI/SDA RC5/SDO RC6/TX/CK RC7/RX/DT. 9 10 1. 13 14 1 2 3 4 5 6 7. 2 3 4 5 6 7. 8 9 10. OSC1/CLKIN OSC2/CLKOUT MCLR/Vpp/THV. RA0/AN0 RA1/AN1 RA2/AN2/VREFRA3/AN3/VREF+ RA4/T0CKI RA5/AN4/SS RC0/T1OSO/T1CKI RC1/T1OSI/CCP2 RE0/AN5/RD RC2/CCP1 RE1/AN6/WR RC3/SCK/SCL RE2/AN7/CS RC4/SDI/SDA RC5/SDO RC6/TX/CK RC7/RX/DT RD0/PSP0 RD1/PSP1 RD2/PSP2 RD3/PSP3 RD4/PSP4 RD5/PSP5 RD6/PSP6 RD7/PSP7. PIC16C73B. PIC16C73B A. 7. 8. 9. B. 4. 5. 6. RB0/INT RB1 RB2 RB3/PGM RB4 RB5 RB6/PGC RB7/PGD. A. 33 34 35 36 37 38 39 40 15 16 17 18 23 24 25 26 19 20 21 22 27 28 29 30. PIC16F877. B 1. 2. 3. ON. 0. = #. 1. *. C. + D 4. C. 3. D. 2. C. Fig. 2.9: Esquema en el Isis.. El PIC que simula la MT8885 no se limita a esta función ya que al tributar al del extremo recrea el canal completo y tramita la comunicación bilateral por lo que en este esquema se ha omitido toda la interfaz telefónica, que también corre - 37 -.
(49) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. dentro del PIC “Canal”. El pin RA5 lo activa el PIC “Canal” para indicar la presencia de un dato válido en el bus. El objetivo es que el programa que se corra en nuestro PIC “Control” cuente con la respuesta recreando su medio real de trabajo además de dar la posibilidad de que. sea sometido a la mayor. cantidad de eventos adversos probables. Con el teclado puesto al PIC “Extremo” se pueden transmitir números para comprobar la respuesta frente a los comandos y posibles errores. No es nuestro objetivo en nuestra tesis la descripción de los programas que corren en los PICs de canal y extremo. Fueron desarrollados exclusivamente como herramientas de ayuda al diseño y simulación.. 2.2.3 Estructura de Software. Para facilitar la programación de la atención a la MT8885 se utilizará la interrupción externa, por lo que se conectó el pin IRQ* a RB0. Ese dispositivo estará en todo momento activo (PWD a tierra) y a la escucha en caso de que el otro extremo pida atención, evento que debe ocurrir cada determinado tiempo para comprobar de que el canal está activo y no han sufrido cortes o desconexiones. En el caso de la recepción, cuando ocurra una interrupción, la subrutina se encargará de tomar el dato y validarlo según la secuencia de llegada. Luego el programa continuará en el lazo principal mientras que no llegue ningún otro caracter. Un conteo de 3 segundos se activará independiente al programa principal y cuando se agote el tiempo, se determinará como caída la comunicación. Los caracteres que hayan arribado hasta ese momento serán desechados.. El. conteo de tiempo es tan extenso para dar la posibilidad de introducir por un teléfono común los comandos, teniendo así otra vía de configuración en la versión de desarrollo. Cada vez que un carácter arriba se va conformando la cadena mientras que la secuencia sea coherente en un determinado comando del extremo. Cualquier. - 38 -.
(50) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. caracter que llegue y no sea consecuente con los anteriores, por seguridad, implicará que la cadena formada hasta ese punto sea desechada y se lance una petición de reenvío.. Fig. 2.10: Diagrama de flujo para la recepción.. Cuando la secuencia de caracteres recibidos se traduzca en un comando concreto (implica la llegada de un cierre de cadena y sin errores), su ejecución será desde el ‘main’ y nunca desde la interrupción para evitar que los ciclos de recolección de datos sean detenidos y falseados. Queda separada así la recepción por la interrupción y la transmisión por una subrutina que será llamada desde el ‘main’. En el caso de la transmisión la MT8885 debe ser inicializada, escribiendo en sus registros internos el modo en que va a operar la comunicación. Para ello cuenta con 2 registros de control, CRA y CRB y el registro Estatus, todos de 4 bits (el anchos del bus). En el registro Estatus del PIC se encuentra el estado de las bandera de IRQ*, y los búferes de transmisión y recepción. - 39 -.
(51) Capítulo II Descripción de Algoritmo y Software. Esquema de Hardware. Escribiendo en los CRA habilitamos el modo DTMF y la interrupción IRQ. En CRB habilitamos la transmisión en el modo de ráfaga. De esta forma cuando escribimos un datos en el bus y activamos CS* y DS, la MT8885 genera el tono correspondiente al dato y hace una espera de 50 ms donde garantiza que el tono sea estable y reconocible. Luego de la demora, baja el pin IRQ para generar una interrupción en el PIC que significa que el dato es válido en la línea y espera uno nuevo para la transmisión. En este caso este pin será atendido por encuesta en una ventana de tiempo de 100 ms. Si no se recibe una respuesta implicará que la comunicación con la MT8885 ha presentado un problema. Esto significa que a diferencia de la recepción, la rutina de la transmisión no retornará hasta no haber completado la secuencia o encontrado un error. La transmisión por reporte se realizará cuando una alarma sea activada, un voltaje llegue a un punto crítico o sea solicitada por el extremo. A diferencia de la recepción, la rutina de la transmisión no retornará hasta no haber completado la secuencia.. - 40 -.
(52) _. Capítulo III. - 41 -.
(53) Capítulo III Hardware. Montaje y Puesta en Marcha. Capítulo III: Hardware. Montaje y Puesta en Marcha del Dispositivo. En este capítulo haremos referencia al hardware y los requerimientos de los componentes que se utilizan. Nos acercaremos a las circuiterías externas recomendadas para los componentes y comentarios de sus fabricantes en sus hojas de datos así como la propuesta de una estructura para el impreso.. 3.1 Análisis de Hardware. Consideraciones para el Montaje. En este aparatado explicaremos las características técnicas y los requerimientos de los componentes utilizados para el montaje final del dispositivo. Para la ejecución del impreso, previamente fue diseñado en el Ares (Labcenter 2007), herramienta del Proteus 7.2, complemento del Isis, para generar los impresos de los circuitos simulados.. 3.1.1 Tableta de multiplexores CD4051. La tableta de los 5 multiplexores CD4051 (ESTIL@E) estaba implementada y funcionando, así como el extremo donde convergen todos los centros no atendidos. Estos poseen su propio chasis y trabajan como un dispositivo que se conecta (y subordina) a otro que los controla.. Fig. 3.1: Vista superior del ESTIL@E.. Con 5 pines datos y 3 de control un conector DB9 será suficiente.. - 42 -.
(54) Capítulo III Hardware. Montaje y Puesta en Marcha. Las líneas del conector pueden tributar directamente al PIC. Necesitaremos capacitores de 0,1 µF a la entrada de los pines del Puerto A del PIC para evitar rebotes, no obstante, se ejecutan tiempos de espera para garantizar el cambio de estados y se comprueba con el estado anterior, como se explicó anteriormente. La tableta contiene las protecciones pertinentes frente a los eventos on/off, no así en cuanto los analógicos. No es objetivo de nuestro trabajo la descripción de este dispositivo aunque referiremos brevemente sobre sus protecciones. Para las señales analógicas (los voltajes) se asegura que estos no sobrepasen el nivel de VDD para lo cual a la tableta se le agregó un operacional que se dispara cuando la señal alcanza la referencia de 5,1 V dada por un zener, satura al transistor y el circuito de entrada va a tierra evitando un sobrevoltaje al PIC (figura 3.1). Estas protecciones están puestas al pin 13 (X0) de los 4 primeros multiplexores.. Fig. 3.2: Protección Contra Sobrevoltaje.. En la práctica, el voltaje en los bornes de las celdas de las baterías puede llegar a cercanos a 58 V. El nivel de referencia para los conversores AD fue puesto 5 V, por lo que se necesita una red de atenuación para adecuar los 60 V a los 5 V del PIC. Un divisor de voltaje resistivo mantiene una transferencia lineal lo que lo hace una variante adecuada para este fin.. - 43 -.
(55) Capítulo III Hardware. Montaje y Puesta en Marcha. En este caso el nivel máximo de 5 V coincide con 60 V. Para un consumo bajo (1 mA), toda la red resistiva tendrá 60 kΩ. La red se muestra en la figura 3.2. Poner más de una resistencia en serie para el divisor no es más que una medida de protección.. Fig. 3.3: Red resistiva.. Respecto a los eventos on/off, cada uno de los pines de entrada restantes (de X1 a X7) está conectado al exterior a través de un optocoplador que protege al multiplexor y al resto de la circuitería de cualquier sobrevoltaje que se induzca en la línea desde los censores hasta los multiplexores. Una referencia de 5,1 V debe ir al SISAP para lograr una mayor exactitud en el CAD. La microchip recomienda los siguientes diodos zener:. Tabla 3.1: Zeners recomendados por la Microchip (Sumit Mitra, Stan D’Souza et al. 1997).. Para garantizar los 5,1 V se incluye un proceso de calibración mediante un potenciómetro (ver figura 3.4). Utilizaremos el 1N752, de 5.6 V.. - 44 -.
(56) Capítulo III Hardware. Montaje y Puesta en Marcha. Fig. 3.4: Voltaje de Referencia.. 3.1.2 La MT8885 Para la entrada de los tonos el fabricante nos propone dos variantes; terminal simple o terminal diferencial, o sea, para línea balanceada o desbalanceada. Debido a que vamos a independizar las líneas de transmisión y recepción usaremos las líneas desbalanceadas. Coincidimos que la configuración de Terminal Simple o desbalanceado que propone el fabricante para la circuitería completa que se ajusta a nuestros requerimientos (Mitel 1995).. Fig. 3.5: Configuración de Entrada Terminal Simple.. El fabricante en su hoja de datos nos ofrece la configuración básica para su montaje. En nuestro dispositivo el pin PWDN está puesto a tierra.. - 45 -.
Figure

+7


Outline
Documento similar
Luis Miguel Utrera Navarrete ha presentado la relación de Bienes y Actividades siguientes para la legislatura de 2015-2019, según constan inscritos en el
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
