Características dinámicas de las cargas
114
0
0
Texto completo
(2) UNIVERSIDAD CENTRAL “MARTA ABREU” DE LAS VILLAS FACULTAD DE INGENIERÍA ELÉCTRICA. Departamento de Estudios Electroenergéticos. TRABAJO DE DIPLOMA. Título: Características dinámicas de las cargas Autor: Trong Mai Van Tutor: Dr. Leonardo Casas Fernández Santa Clara 2011 “Año 53 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del autor. Firma del eje de Departamento donde se defiende el trabajo. Firma del responsable de información científico-técnico.
(4) I. PENSAMIENTO. “Ser cultos para ser libres” José Martí.
(5) II. DEDICATORIAS. Dedico este trabajo a mis padres, hermanos y novia quienes han enriquecido mi voluntad de esperanza y confianza con su amor y dedicación..
(6) III. AGRADECIMIENTOS Quiero agradecerles a todos aquellos que de una forma u otra han contribuido a la realización de este trabajo de diploma. A mis profesores de todos niveles de enseñanza y en especial a los de la universidad por su significación en mi formación como profesional en los años de carrera. A todos los amigos que han compartido conmigo los momentos tristes y alegres de la vida estudiantil. A ambos gobiernos cubano y vietnamita por darme la oportunidad de realizar mi sueño de ser un ingeniero. Especialmente a mi tutor, Dr. Leonardo Casas Fernández, quien me ha enseñado con su amor, paciencia y sus profundos conocimientos..
(7) IV. TAREA TÉCNICA. ¾ Búsqueda bibliográfica sobre la modelación de carga. ¾ Realización de las mediciones de campo en el nodo B 33kV de Santa Clara durante la manipulación del banco de capacitores. ¾ Análisis de los datos de medición. ¾ Simulación del fenómeno con Software PSX. ¾ Redacción del informe. ¾ Confección de la exposición.. Firma del autor. Firma del tutor.
(8) V. RESUMEN Los diversos elementos que componen los Sistemas Eléctricos de Potencia (SEP) han sido detalladamente estudiados desde que comenzaron a ser utilizados con fines prácticos. Los análisis científicos técnicos que se han realizado sobre estos componentes han sido con la idea de conocer tanto su comportamiento, como la forma de plasmar en diseños más eficientes nuevas y mejoradas versiones. Generadores,. trasformadores,. líneas,. motores,. relés,. etc.. han. ido. evolucionando de una forma ascendente durante más de 100 años; sin embargo algo diferente ha ocurrido con el comportamiento de las cargas eléctricas. En los últimos años esta concepción ha cambiado radicalmente y en la actualidad numerosos autores dedican grandes esfuerzos en adentrarse dentro de sus características con el fin de conocer los detalles más relevantes de las mismas. En este trabajo se hace un estudio de las principales características de las cargas eléctricas asociadas a los SEPs. Se han valorado los criterios más actuales de prestigiosos autores, a la vez que se ha estudiado el comportamiento. de. las. cargas. cubanas. tomando. para. ello,. como. representación aproximada una parte del Sistema Electroenergético Nacional (SEN). Las particularidades de los comportamientos estáticos y dinámicos, así como el poder de recuperación de las cargas ante variaciones bruscas de la tensión provocadas de forma artificial, han sido esmeradamente estudiadas con el fin de llegar a una primera aproximación de sus características en las redes cubanas. Se han realizado mediciones de campo con instrumentos de última generación para la obtención de los datos primarios los que han sido analizados y procesados con sistemas de cómputo especializados para alcanzar los resultados que se exponen..
(9) VI. ÍNDICE PENSAMIENTO .................................................................................................. I DEDICATORIAS ................................................................................................ II AGRADECIMIENTOS ....................................................................................... III TAREA TÉCNICA ............................................................................................. IV RESUMEN ......................................................................................................... V INTRODUCCIÓN ............................................................................................... 1 CAPÍTULO 1 Modelos de carga ......................................................................... 4 1.1 Necesidad de los modelos de carga ......................................................... 4 1.2 Conceptos básicos.................................................................................... 6 1.2.1 Carga .................................................................................................. 6 1.2.2 Modelos de carga ............................................................................... 7 1.2.3 Tipos de modelos de carga ................................................................ 7 1.3 Modelos estáticos ..................................................................................... 8 1.4 Modelos dinámicos ................................................................................. 15 1.4.1 Motores de inducción........................................................................ 16 1.4.2 Lámparas de descarga ..................................................................... 19 1.4.3 Equipos generadores de calor con control termostático ................... 19 1.4.4 Taps de los transformadores de las subestaciones .......................... 20 1.5 Recuperación exponencial de la carga ................................................... 20 CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta ... 25 2.1 El enfoque basado en mediciones .......................................................... 26 2.2 Enfoque basado en el conocimiento de la composición de la carga. ...... 29 2.3 Características de algunos componentes de carga más utilizados......... 32 2.3.1 Lámparas de descarga ..................................................................... 32 2.3.2 Motores de inducción........................................................................ 34.
(10) VII. CAPÍTULO 3. Materiales y métodos ................................................................ 39 3.1. Selección del nodo en el SEN ............................................................. 39. 3.2. Mediciones de campo ......................................................................... 41. 3.3. Análisis de los datos de medición ....................................................... 43. 3.4 Procesos de la simulación ...................................................................... 47 3.5 Comparaciones de resultados ................................................................ 49 3.6 Análisis de la recuperación de carga ...................................................... 50 3.7 Verificación de resultados ....................................................................... 54 CONCLUSIONES ............................................................................................ 57 RECOMENDACIONES .................................................................................... 58 REFERENCIAS BIBLIOGRÁFICAS ................................................................. 59 ANEXOS .......................................................................................................... 61.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN Una de las características más relevantes de los elementos que integran los SEPs, lo es sin dudas, que el descubrimiento de prácticamente todos los fenómenos que los describen han estado acompañados por los sistemas de ecuaciones que de una forma u otra han conducido a la obtención de modelos matemáticos, que a través del tiempo se han ido perfeccionando. El caso de la modelación de las cargas asociadas a las redes eléctricas no es la excepción, sin dejar de reconocer que este fenómeno se ha venido desarrollando de una forma más rigurosa solo a partir de los últimos años. Las primeras representaciones de las cargas se hicieron con el objetivo de estudiar las redes bajo las condiciones en estado estable. Para cumplir este fin se hicieron representaciones simples que ofrecieron resultados acordes a los métodos de cálculo existentes en cada época. Como lógica consecuencia del desarrollo tanto de los sistemas de medición como de las herramientas de cálculo, nuevos modelos, cada vez más complejos y precisos han surgido, con los que se ha ido ganando en la calidad de los estudios que se realizan. Los modelos estáticos de las cargas satisfacen los estudios relacionados con este tipo de análisis, pero no responden a las exigencias de comportamiento de los estudios dinámicos, donde se requieren representaciones que respondan a condiciones transitorias típicas de estas investigaciones. La clasificación general de los modelos de las cargas en estáticos y dinámicos define con acierto las dos grandes vertientes de este gran campo de búsqueda de una representación matemática adecuada para ser implementada en los sistemas de cálculo especializados que se utilizan en los análisis y diseños de los SEPs. La diversidad de cargas, así como el uso de cada una de ellas en momentos en que los clientes sienten la necesidad de su utilización, son las características más difíciles de tener en cuenta a la hora de definir un modelo. La experiencia muestra que es prácticamente imposible conocer la cantidad y variedad de cargas conectadas a una red, por muy simple que esta sea, en cada momento..
(12) INTRODUCCIÓN. 2. Se han desarrollado diversas técnicas que ayudan a la elaboración de los modelos de carga, entre las que figuran los de medición y los de agregación. Los modelos de medición se basan, como su nombre indica, en la realización de mediciones de las principales variables asociadas con las cargas, fundamentalmente de la potencia activa, la potencia reactiva y la tensión aplicada a ellas. Esta técnica requiere tanto de instrumentos de calidad y precisión para captar los valores de los parámetros que se estudian, como de medios para provocar los disturbios que produzcan variaciones sensibles en el voltaje, tales como la conexión y/o desconexión de bancos de capacitores o la acción de los taps de los transformadores. Los modelos de agregación descansan en la realización de un levantamiento de las principales cargas, que de forma mayoritaria, se encuentran asociadas a los nodos, y por supuesto el conocimiento del comportamiento individual de cada una de ellas: cocinas, lámparas, equipos de aire acondicionado, refrigeradores, etc. Aunque en la literatura especializada existe este tipo de información, también es posible obtenerla por ensayos de laboratorio. Tanto un método como el otro requieren de software adecuados para el tratamiento de la información acopiada..
(13) INTRODUCCIÓN. 3. Problema de investigación ¾ ¿Cómo valorar de forma preliminar los modelos de carga obtenidos y su efecto sobre el Sistema Electroenergético Nacional (SEN) en la actualidad? Objetivo general ¾ Realizar una primera aproximación al modelo de carga que se adecue a las características del SEN Objetivos específicos ¾. Realizar una revisión bibliográfica que permita conocer las tendencias actuales sobre la modelación de cargas. ¾. Determinar mediante mediciones los parámetros de los modelos que se ajusten a las mediciones realizadas en Santa Clara.. ¾. Evaluar la característica de recuperación de las cargas en los nodos medidos.. ¾. Realizar una valoración preliminar del comportamiento del SEN en la región central cuando se emplean los modelos encontrados..
(14) CAPÍTULO 1: Modelos de carga. 4. CAPÍTULO 1 Modelos de carga Se muestran los resultados del análisis de la bibliografía correspondiente al tema del comportamiento de las cargas en los sistemas eléctricos de potencia, para su aplicación en los estudios de estabilidad. Se exponen los diferentes modelos desarrollados, las formas (expresiones o ecuaciones) a las cuales responden, además de sus alcances y deficiencias en cuanto a exactitud y complejidad. 1.1 Necesidad de los modelos de carga La inestabilidad del voltaje se define como la incapacidad de un sistema eléctrico de potencia para recuperar la tensión nominal después de una perturbación [1]. Las averías en equipos, los errores humanos o los eventos ambientales pueden causar serias fallas que afectan la operación de los sistemas eléctricos. Después de la eliminación de una falla, el nivel de tensión tiende a recuperarse en los sistemas fuertes, en tanto que en los más débiles no siempre ocurre así, produciéndose inestabilidad en la tensión. Las zonas de inestabilidad de voltaje dependen en un alto porcentaje del comportamiento de las cargas, fundamentalmente de los motores eléctricos tanto grandes como pequeños, por lo que sus características constituyen un importante aspecto en estos estudios. Una falla reduce la tensión durante unos pocos ciclos, haciendo que los motores en su área empiecen a frenarse y demanden más potencia reactiva, lo que a su vez provoca un aumento de las pérdidas reactivas (I2X) en líneas y transformadores del sistema, mientras que la potencia reactiva generada por líneas y capacitores se reduce bruscamente. Como resultado de lo anterior, puede ocurrir que el voltaje del área no pueda recuperarse una vez que se haya eliminado la falla e incluso puede caer aún más, agravando el problema lo que puede conducir a un colapso de voltaje. La única forma de salir de esta crítica situación, es mediante la desconexión de al menos un grupo de cargas [1]. En algunos casos, las protecciones de los motores los sacan de servicio, pero en algunas aplicaciones masivas, tales.
(15) CAPÍTULO 1: Modelos de carga. 5. como los equipos de aire acondicionado, refrigeradores y otras esto no ocurre, por lo tanto, el colapso puede prolongarse sin control en grandes áreas del sistema con serias afectaciones. En muchas empresas eléctricas resulta difícil la realización de estudios relacionados con estos fenómenos por carecer de modelos apropiados del comportamiento dinámico de sus cargas [1], una tarea difícil, pero posible. La necesidad de la modelación de las cargas ha aumentado en los últimos años, lo que se ha convertido en un nuevo campo de investigación vinculado a la estabilidad de los sistema eléctricos [2]. Un colapso de voltaje puede durar varios minutos, sin embargo, la mayoría de los modelos de carga hechos en el pasado se han centrado en las máquinas de inducción, de manera crítica, en el intervalo de varios segundos después de una perturbación. Otros modelos estáticos no lineales se utilizan para analizar el comportamiento del sistema a largo plazo mediante la respuesta de la carga como una función de la tensión. Encontrar un modelo dinámico capaz de predecir tanto a corto como a largo plazo el comportamiento de las cargas ha sido un objetivo durante los últimos años, para lo cual no solo se requiere estudiar los motores de inducción, sino también las demás componentes integrantes de las cargas; a la vez que se deben considerar los. cambios de los taps de los. trasformadores, las conexiones y desconexiones de banco de capacitores, las variaciones espontáneas de carga, así como otros componentes que afectan la estabilidad del sistema. De forma general, el uso de los modelos estáticos de carga en el análisis de la estabilidad está siendo sustituido por el de modelos dinámicos de carga. Desde la aparición de los primeros sistemas eléctricos, se han dedicado tiempo y recursos para obtener modelos de sistemas de generación y transmisión, para los cuales se dispone de representaciones suficientemente exactas, sin embargo, no ha ocurrido lo mismo con las cargas, las que han recibido una.
(16) CAPÍTULO 1: Modelos de carga. 6. menor atención. Incluso, en la actualidad, las cargas constituyen un tema incierto para muchas empresas [3]. Entre los elementos de un sistema eléctrico, la carga es uno de los componentes más difíciles de modelar, debido a que está compuesta por un gran. número. de. dispositivos. tales. como. lámparas. fluorescentes. e. incandescentes, refrigeradores, calentadores, compresores, motores, hornos y entre otros que se encuentran conectados a la red de una forma casi impredecible, por lo que la composición exacta de la carga es difícil de estimar, además de que su composición varía con el tiempo [4]. Un buen modelo de carga permite obtener resultados confiables en los estudios de estabilidad con impacto favorable tanto en la economía como en la fiabilidad de la operación de los sistemas. Además, la combinación de un modelo preciso de carga y una aplicación de monitoreo en tiempo real abren nuevas posibilidades competitivas en la industria eléctrica [5]. 1.2 Conceptos básicos 1.2.1 Carga El término “carga” es una concepción amplia y puede definirse de diferentes formas, sin embargo, la más completa es la que se refiere a aquella parte del sistema que no está explícitamente representada en el modelo del mismo, pero que se trata como si fuera un solo dispositivo conectado a un nodo, del cual consume potencia [6]. Este concepto se refiere a “carga de nodo”. Esta definición incluye no solo a los elementos que únicamente consumen potencia, sino a aquellos que influyen directa o indirectamente en el comportamiento del sistema, como los bancos de condensadores, los reguladores de voltaje y los transformadores reductores de distribución. Los cambios de taps en los transformadores no corresponden a una componente de carga, pero desde el punto de vista del sistema de transmisión se consideran como una parte de ella porque después de una perturbación, restauran los voltajes secundarios a sus valores de pre-falla y también afectan el estado de las cargas sensibles al voltaje..
(17) CAPÍTULO 1: Modelos de carga. 7. 1.2.2 Modelos de carga Un modelo de carga se puede definir como la representación matemática de la relación entre la potencia consumida y la magnitud, frecuencia de la tensión del nodo asociado [7]. Para obtener dichos modelos son esenciales los estudios basados en pruebas de campo, en conjunto con el análisis matemático y estadístico. En general, el objetivo de un modelo de carga es reproducir el comportamiento de la carga real a través de una correcta definición de los parámetros que conforman sus ecuaciones de acuerdo con su comportamiento durante situaciones anormales como cambios bruscos en el voltaje o la corriente. Para ello, se recomienda que un buen modelo tenga dos características: 1. El modelo debe corresponderse físicamente con la carga, es decir, el modelo no debe contravenir las características reales de la misma. 2. El modelo debe ser flexible. 1.2.3 Tipos de modelos de carga Un modelo debe representar el sistema de acuerdo con lo que se desea estudiar. Un modelo muy simplificado puede dar resultados erróneos, mientras que uno muy detallado revela resultados innecesarios y hace la investigación más lenta y costosa. En este sentido es recomendable probar varios modelos para definir cuál es el que cumple con los requisitos de precisión y complejidad. Los modelos de carga se dividen en dos grandes grupos: modelos estáticos y modelos dinámicos; esta clasificación se basa en el tipo de datos que se consideran. Las potencias activa y reactiva consumidas se consideran como las señales de la salida, en tanto que la tensión y la frecuencia se asocian con las señales de entrada. En el caso de los modelos estáticos, la salida depende de la entrada y sólo varía cuando hay un cambio en la entrada. En el modelo dinámico, la salida depende de la entrada pasada y ésta cambia con el tiempo, si el sistema no está en equilibrio [8]..
(18) CAPÍTULO 1: Modelos de carga. 8. En la mayoría de los modelos de carga se consideran tres constantes: P0, Q0 y V0 y representan los valores iniciales de la potencia activa, reactiva y el voltaje.. 1.3 Modelos estáticos Estos modelos expresan, como ya se indicó, las potencias activa y reactiva en cualquier instante del tiempo, como función de la magnitud y frecuencia del voltaje en ese momento. En ocasiones el efecto de la frecuencia puede despreciarse para hacer el modelo más sencillo o porque se ha visto que su efecto es de poca influencia. Por esta razón, los modelos estáticos se clasifican como independientes o dependientes de la frecuencia. Dentro de los primeros, se pueden mencionar los de potencia, corriente e impedancia constantes; los segundos son modelos más generales y complejos, y tienen la ventaja de que presentan un comportamiento más real durante simulaciones, ya que toman en cuenta el efecto combinado de cambios de voltaje y frecuencia. Uno de los modelos más usado es el de la representación exponencial dado por:. P = PO (V ) a. 1.1. Q = QO (V ) b. 1.2. En este y otros modelos de carga. V=. V VO. 1.3. Los parámetros de este modelo son los exponentes a y b [9], que algunos autores los representan como Np y Nq [10]. Al hacer estos exponentes igual a 0, 1, o 2, el modelo representa las cargas como potencia, corriente o. impedancia constante, respectivamente. El exponente “a” (o el “b”) es casi igual a la pendiente dP/dV (o dQ/dV) en V = V0..
(19) CAPÍTULO 1: Modelos de carga. 9. Para cargas mixtas estos exponentes varían entre 0.5 y 1.8 para “a” y entre 1.5 y 6 para “b” [11]. El efecto de saturación de los motores y transformadores con la variación del voltaje, hace que el exponente “b” varíe como una función no lineal del voltaje. A medida que el voltaje aumenta, Q tiende a incrementarse significativamente. En la ausencia de información concreta, el modelo estático de carga más aceptado es el que representa a la potencia activa como una carga de corriente constante (a = 1) y la potencia reactiva como impedancia constante (b = 2) [12]. Un modelo alternativo que ha sido ampliamente usado para representar la dependencia de potencia con el voltaje es el modelo polinomial:. P = P0 [p1V 2 + p 2 V + p 3 ]. 1.4. Q = Q0 [q1V 2 + q2 V + q3 ]. 1.5. p1 + p2 + p3 = 1. Donde:. y. q1 + q 2 + q3 = 1. Este modelo es comúnmente referido como modelo ZIP, debido a que está compuesto por impedancia constante (Z), corriente constante (I) y potencia constante (P) [6, 13]. Los parámetros de este modelo son los coeficientes p1 a p3 y q1 a q3, los cuales definen la proporción de cada componente o la división de la potencia de las cargas en impedancia, corriente y potencia constantes. En un modelo de carga donde la dependencia entre la potencia en el voltaje es lineal, las pendientes se pueden calcular mediante [14]:. tan θ =. ΔP ΔV. tan θ =. ΔQ ΔV. 1.6. La dependencia de las características de carga con la frecuencia generalmente se representa afectando el modelo exponencial o el de polinomios por un factor como se muestra a continuación:. P = PO (V ) a (1 + K pf Δf ). 1.7.
(20) CAPÍTULO 1: Modelos de carga. Q = QO (V )b (1 + K qf Δf ). 10. 1.8. o. P = PO [p1V 2 + p 2 V + p 3 ](1 + K pf Δf ). 1.9. Q = Q O [q1V 2 + q2 V + q3 ](1 + K qf Δf ). 1.10. Donde Δf es la desviación de la frecuencia (f-fo). Kpf varía entre 0 y 3.0, y Kqf entre -2.0 y 0. La frecuencia f no es, generalmente, una variable de estado en el modelo de sistema utilizado para los estudios de estabilidad, por lo que se suele calcularse como la derivada con respecto al tiempo del ángulo del voltaje [15]. Un modelo estático de gran flexibilidad es:. P = PO [ PZIP + PEXP1 + PEXP 2 ]. 1.11. Donde:. PZIP = p1V 2 + p2 V + p3. PEXP1 = p 4 (V ) a1 (1 + K pf Δf ) PEXP 2 = p5 (V ) a2 (1 + K pf Δf ) Expresiones similares se emplean para la potencia reactiva. Los capacitores se representan de forma separada. En general, se ha demostrado que no siempre los modelos estáticos simulan con fidelidad el comportamiento de la las cargas debido a las características dinámicas de las mismas [16]. Algunos autores [2] y [4] recomiendan el modelo exponencial para presentar algunas de las cargas más comunes. En la Tabla 1.3.1 se exponen los valores de constantes Np y Nq de sus modelos..
(21) CAPÍTULO 1: Modelos de carga. 11. Tabla 1.3.1 Valores de Np y Nq del modelo exponencial para varios tipos de carga [2] Componente de carga. Np. Nq. Aire acondicionado. 0.50. 2.50. Carga resistiva. 2.00. 0.00. Lámpara fluorescente. 1.00. 3.00. Bombas, ventiladores y otros motores semejantes. 0.08. 1.60. Motor industrial grande. 0.05. 0.50. Motor industrial pequeño. 0.10. 0.60. Curvas típicas de P y Q de los equipos más usados Con los modelos exponenciales mostrados en la tabla anterior han confeccionado curvas P-V y Q-V de diferentes tipos de carga, los que se muestran a continuación: a) Aires acondicionados. ⎛V ⎞ P (V ) = P0 ⎜ ⎟ ⎝ V0 ⎠. 0.5. y. ⎛V ⎞ Q(V ) = Q0 ⎜ ⎟ ⎝ V0 ⎠. 2.5. Figura 1.3.1 Curvas P-V y Q-V de aires acondicionados. 1.3.1.
(22) CAPÍTULO 1: Modelos de carga. 12. b) Calentadores. Evidentemente Q = 0.. ⎛V ⎞ P (V ) = P0 ⎜ ⎟ ⎝ V0 ⎠. 2. 1.3.2. Figura 1.3.2 Curvas P-V y Q-V de cargas resistivas.. c) Lámparas fluorescentes 1. ⎛V ⎞ P (V ) = P0 ⎜ ⎟ ⎝ V0 ⎠. y. ⎛V ⎞ Q(V ) = Q0 ⎜ ⎟ ⎝ V0 ⎠. 3. Figura 1.3.3 Curvas P-V y Q-V de lámparas fluorescentes.. 1.3.3.
(23) CAPÍTULO 1: Modelos de carga. 13. d) Equipos de bombeo, ventiladores, y similares. ⎛V ⎞ P (V ) = P0 ⎜ ⎟ ⎝ V0 ⎠. 0.08. 1.6. ⎛V ⎞ Q(V ) = Q0 ⎜ ⎟ ⎝ V0 ⎠. 1.3.4. Figura 1.3.4 Curvas P-V y Q-V de equipos de bombeo, ventiladores, y similares.. e) Motores eléctricos grandes. ⎛V ⎞ P (V ) = P0 ⎜ ⎟ ⎝ V0 ⎠. 0.05. y. ⎛V ⎞ Q(V ) = Q0 ⎜ ⎟ ⎝ V0 ⎠. 0.5. Figura 1.3.5 Curvas P-V y Q-V de motores eléctricos grandes. 1.3.5.
(24) CAPÍTULO 1: Modelos de carga. 14. f) Motores eléctricos pequeños. ⎛V ⎞ P (V ) = P0 ⎜ ⎟ ⎝ V0 ⎠. 0.1. y. ⎛V ⎞ Q(V ) = Q0 ⎜ ⎟ ⎝ V0 ⎠. 0.6. 1.3.6. Figura 1.3.6 Curvas P-V y Q-V de motores eléctricos pequeños.. g) Cargas compuestas Para el caso en que la carga tenga una composición heterogénea se pueden utilizar los modelos polinomiales. Por ejemplo, una carga que combina pequeños motores, lámparas fluorescentes y resistencias para producción de calor se representa por las siguientes ecuaciones.. Pcomposite = α 1 ⋅ PsmallMotor + α 2 ⋅ Plampfl + α 3 ⋅ Prsh. 1.3.7. Qcomposite = α1 ⋅ QsmallMotor + α 2 ⋅ Qlampfl + α 3 ⋅ Qrsh. 1.3.8. Donde:. α1 + α 2 + α 3 = 1. PsmallMotor = PO (. V 0.1 ) V0. QsmallMotor = QO (. V 0.6 ) V0.
(25) CAPÍTULO 1: Modelos de carga. Plampfl = PO (. Prsh = PO (. V 1 ) V0. V 2 ) V0. 15. Qlampfl = QO (. Qrshl = QO (. V 3 ) V0. V 0 ) V0. αi : Coeficiente que expresa el porcentaje de determinado componente en la. carga total. A modo de ejemplo se expone el siguiente caso: una carga compuesta por un 10 % de pequeños motores, un 20 % de lámparas fluorescentes y un 70 % de carga resistiva, Figura 1.3.9.. Figura 1.3.9 Curvas de P y Q de una carga compuesta. En los gráficos del Anexo 1 se muestran las potencias activa y reactiva para otros casos con diferentes proporciones de carga de acuerdo con [2]. 1.4 Modelos dinámicos Los modelos dinámicos permiten conocer las potencias activa y reactiva en cualquier instante de tiempo como función de la magnitud y la frecuencia del voltaje en el mismo instante en que se haya producido un disturbio. Generalmente se utilizan ecuaciones diferenciales para representarlos; brindan una mayor fidelidad en los resultados y son más confiables que los obtenidos con los modelos estáticos [3]..
(26) CAPÍTULO 1: Modelos de carga. 16. Para los estudios de los fenómenos de corta duración resulta imprescindible la modelación dinámica de algunos de sus componentes, entre los que figuran: 1. Los motores de inducción 2. Lámparas de descarga 3. Equipos generadores de calor con control termostático 4. Taps de los transformadores de las subestaciones 1.4.1 Motores de inducción Una de las cargas más comunes en los sistemas eléctricos son los motores de inducción, existen sistemas en que llegan a representar entre el 60 y el 70% de toda la carga del sistema [4]. Se han elaborado diferentes modelos [9, 10] con los que se pueden estudiar su comportamiento. Si las cargas se afectan debido a la variación de la tensión, estas solo pueden ser descritas mediante modelos dinámicos, y debido a que estos constan de varios componentes con características diferentes, generalmente se describen por sistemas de ecuaciones elaboradas por los propios especialistas del sistema que se estudia, que es un modelo físico que incorpora tanto las características estáticas como las dinámicas, cuya estructura se muestra en la Figura 1.4.1. En estas representaciones los motores de inducción .juegan un papel predominante.. Figura 1.4.1 Estructura propuesta de modelo ZIP y motor de inducción en un nodo..
(27) CAPÍTULO 1: Modelos de carga. 17. El circuito equivalente aproximado de un motor de inducción se muestra en la Figura 1.4.2.. Figura 1.4.2 Circuito equivalente aproximado de un motor de inducción. Si se considera el caso de una carga con par constante, que es prácticamente independiente de la velocidad ω como ocurre en grúas, elevadores y compresores, se tiene que.. Pot ∝ ω I 2 R2 Par = = = Cte ω0 ω0 s. 1.12. Pot. 1.13. Si se considera la velocidad igual a 1 p.u.. I 2 R2 s= Pot. 1.14. s∝ I2. 1.15. Se aprecia que el resbalamiento es proporcional al cuadrado de la corriente a) Análisis de la potencia reactiva: La potencia reactiva consumida por un motor de inducción puede ser dividida en dos partes: la de excitación Qe y la de dispersión Qs, sea:. Qtotal = Qe + Qs. 1.16.
(28) CAPÍTULO 1: Modelos de carga. 18. Donde:. V2 Qe = = I eV Xe. 1.17. Qs = I 2 X s. 1.18. Qe oscila entre el 20 % y el 60 % de la potencia reactiva total. En la Figura 1.4.3 se han representado los dos componentes y la resultante de la potencia reactiva de un motor. Q Qs Qe. Vcrit. V. Figura 1.4.3 Potencia reactiva de un motor de inducción en función del voltaje. b) Análisis de la potencia activa Como se conoce, a partir del circuito equivalente de la Figura1.4.2 se obtiene la expresión de la potencia activa P. R2 V 2 R2 V 2 R2 s P=I = 2 = 2 s ⎤ ⎡⎛ R2 ⎞ 2 R2 + (sX s ) 2 ⎢⎜ ⎟ + X s ⎥ s ⎥⎦ ⎢⎣⎝ s ⎠ 2. 1.19. La característica general de las potencias activa y reactiva en función del voltaje se muestra en la Figura 1.4.4.
(29) CAPÍTULO 1: Modelos de carga. 19. Figura: 1.4.4 Característica general del comportamiento de P y Q en función del voltaje. Siempre ocurrirá que. dQ dP ⟩⟩ Valores típicos son los siguientes: dV dV. dQ dP ≈ 1,5 − 3,5 ≈ 0,3 − 0,75 dV y dV 1.4.2 Lámparas de descarga Las lámparas de descarga debido al proceso de establecimiento de la descarga, ya que cuando el voltaje alcanza un cierto nivel, su reinicio depende de la tensión de recuperación. Las lámparas de descarga incluyen las de vapor de mercurio, vapor de sodio y lámparas fluorescentes. Estas lámparas se extinguen con valores de tensión entre 0.7 a 0.8 p.u. del voltaje nominal y se reinician después de uno o dos segundos después de la recuperación del voltaje. 1.4.3 Equipos generadores de calor con control termostático Las cargas generadoras de calor con control termostático, tales como los calentadores y las cocinas. Estas cargas tienden a conectarse durante las condiciones de baja tensión obedeciendo a la orden de control de temperatura, por lo que el número total de estos dispositivos que se enlazan a la red aumenta a los pocos minutos de producirse una caída de voltaje. Por la gran potencia (como equipo) de estos módulos, su papel en el proceso de recuperación de la potencia activa es el de mayor influencia. Los aires acondicionados y refrigeradores también presentan esas características en condiciones sostenidas, pero en este caso obedeciendo a la frecuencia..
(30) CAPÍTULO 1: Modelos de carga. 20. 1.4.4 Taps de los transformadores de las subestaciones La respuesta de los cambios de taps de los transformadores de las subestaciones, de los reguladores de voltaje y de los bancos de capacitores de tensión controlada, que si bien en sí no constituyen una carga, actúan por estímulo de las bajas tensiones. Estos dispositivos no están explícitamente modelados en muchos estudios, en tales casos, sus efectos se incluyen en la carga equivalente. Estos dispositivos tienden a restaurar el voltaje después de una perturbación, con lo que la potencia de las cargas sensibles a este parámetro se recupera al valor de pre-perturbación. La acción de control empieza alrededor de un minuto después de un cambio de voltaje, y la recuperación de tensión dentro la capacidad de estos dispositivos, se completa en un tiempo total de dos o tres minutos. Los parámetros de estos modelos se pueden determinar por tanto por mediciones de campo como por la agregación de los componentes. 1.5 Recuperación exponencial de la carga El efecto de la recuperación de la carga es un fenómeno que se produce después de un cambio brusco del voltaje, así si la tensión disminuye y se mantiene en este estado, la carga tiende a recuperarse a un valor determinado en dependencia de la composición de la misma. Debido a la complejidad y heterogeneidad de las cargas en los sistemas eléctricos y sus efectos sobre la estabilidad del voltaje se ha propuesto un modelo de la carga con recuperación exponencial [5], descrito por un grupo de ecuaciones no lineales, donde las potencias activa y reactiva tienen una dependencia no lineal en el voltaje: ⎛ ⎜V r + Pr = P .⎜ Tp. o ⎜V dt ⎝ o dp. α. ⎞ s ⎛ ⎟ ⎜V − P .⎜ ⎟ o ⎟ ⎜V ⎠ ⎝ o. α. ⎞ t ⎟ ⎟ ⎟ ⎠. 1.20.
(31) CAPÍTULO 1: Modelos de carga. ⎛ ⎜V P = Pr + P .⎜ l o ⎜V ⎝ o. 21. α. ⎞ t ⎟ ⎟ ⎟ ⎠. 1.21. Donde:. Vo y Po : son el voltaje y la potencia activa iniciales. Pr : es la recuperación de la potencia activa.. P : es la repuesta de la potencia l T p : es la constante de tiempo de la recuperación de la potencia activa. α s y α t : son parámetros dependientes de la potencia activa con el voltaje en los estados estables y transitorios respectivamente. En resumen, el comportamiento de la carga se caracteriza por una constante de tiempo Tp y dos parámetros que relacionan la potencia activa con el voltaje en los estados transitorios. •. αt. y estables. αs .. T p es la constante de tiempo que representa el tiempo que necesita la carga para alcanzar el 63% de su valor final.. •. αs. es el parámetro de dependencia carga-voltaje en estado estable y. cuantifica cuánta carga se ha restaurado después de la recuperación. Un valor a 0 significa una carga se ha recuperado totalmente, mientras un valor diferente indica que la carga sólo se ha recuperado parcialmente, puede tener valores negativos, lo que indica que la carga alcanzó un valor mayor que el inicial.. •. αt. es el parámetro de dependencia carga-voltaje en estado transitorio,. y describe cómo la carga se comporta durante la variación del voltaje. Si es igual a 0, indica que la carga se comporta como la potencia.
(32) CAPÍTULO 1: Modelos de carga. 22. constante, si es igual a 1, equivale a una corriente constante, y si es igual a 2, como una impedancia constante. En la Figura 1.4.4 se muestra la respuesta típica de una carga sometida a una variación brusca de voltaje y su correspondiente recuperación.. Figura 1.4.4 Respuesta típica de una carga al ser sometida a una variación brusca del voltaje y su correspondiente recuperación [2]. Para determinar las constantes, es necesario transformar la ecuación no lineal a una lineal para después utilizar el método de identificación para la ecuación encontrada. En la modelación del sistema eléctrico de potencia de Costa Rica se ha utilizado el modelo exponencial acompañado de una función transferencial que representa la parte dinámica de la carga [3]. ⎛ ⎜V P = Po .⎜ ⎜V ⎝ o. Donde:. ⎞ ⎟ ⎟ ⎟ ⎠. Np ⎛ 1 + T s ⎞ ⎜ p1 ⎟ ⎟ .⎜ ⎜⎜ 1 + T s ⎟⎟ P2 ⎠ ⎝. 1.22.
(33) CAPÍTULO 1: Modelos de carga. 23. P: Potencia activa demandada por la carga. V: Voltaje de la carga. Po: Potencia activa que consume la carga a voltaje y frecuencia nominal. Vo: Voltaje nominal de la carga.. Tp1, Tp2: Constantes de tiempo. Np: Exponente de la relación entre la potencia activa y el voltaje. El modelo de potencia reactiva es muy similar. Esta estructura garantiza modelar la dependencia de la demanda de potencia con el voltaje, así como el comportamiento dinámico de primer orden. El efecto de las variaciones de frecuencia se despreció, ya que, en general, la mayoría de las cargas son independientes de ella y es difícil generar variaciones controladas de frecuencia en el sistema. El cálculo de los parámetros Np, Tp1 y Tp2 se puede realizar mediante el uso de las ecuaciones.. Np =. ⎛ P ⎜ final ln ⎜ ⎜⎜ P ⎝ inicial ⎛ V ⎜ final ln ⎜ ⎜⎜ V ⎝ inicial. ⎞ ⎟ ⎟ ⎟⎟ ⎠ ⎞ ⎟ ⎟ ⎟⎟ ⎠. P − P⎛⎜ to ⎞⎟ ⎝ ⎠ inicial = T P −P p2 inicial final T. T. p1. p2. =. TA ⎛P − P⎛⎜ to ⎞⎟ ⎞⎟ ⎜ ⎝ ⎠⎟ final ln⎜⎜ ⎟ b⋅P ⎜ final ⎟⎠ ⎝. Donde:. 1.23. 1.24. 1.25.
(34) CAPÍTULO 1: Modelos de carga. 24. P⎛⎜ to ⎞⎟ : Potencia transitoria ⎝. ⎠. TA: Tiempo de asentamiento de la potencia dentro de una banda de 2b de. ancho del valor final (ver la Figura).. Figura 1.4.5 Definición de la banda de asentamiento de potencia. Esta función, además de gozar de una alta fiabilidad, tiene la gran ventaja de que tiene una menor cantidad de constantes, con lo que se ahorra y se simplifica el proceso a la hora de manejar los resultados de la modelación..
(35) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 25. CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta Para simular el comportamiento de un sistema de potencia, es necesario tener modelos adecuados de cada uno de sus elementos, lo que es relativamente fácil para el caso de generadores, transformadores o líneas, dado que sus comportamientos han sido estudiados durante muchos años por muchos autores, además de que las ecuaciones asociadas a su comportamiento obedecen a las leyes básicas de los conceptos electromagnéticos, bien identificados desde los primeros años del surgimiento de la aplicación de la energía eléctrica, sin embargo, el caso es otro cuando se trata de las cargas por las siguientes razones: a. La carga de un nodo está compuesta por un gran número de dispositivos diferentes en proporciones prácticamente desconocidas. b. Al ser las cargas de propiedad de los usuarios hace que sean inaccesibles a los especialistas de los sistemas eléctricos. c. La composición de la carga varía durante el día, la semana, el mes, el año, y por el efecto de parámetros externos, lo que conduce a una falta de información precisa sobre su composición. d. La incertidumbre en la característica de muchos componentes de la carga, particularmente ante sensibles variaciones de la frecuencia y el voltaje. La representación precisa de la carga requiere que se tenga en cuenta el efecto combinado de todos los elementos que la componen en un momento dado [11]. De acuerdo con la bibliografía, existen dos enfoques básicos para tratar de modelar el comportamiento estático y dinámico de la carga. El primero es medir directamente la sensibilidad de la potencia activa y reactiva de la carga ante variaciones del voltaje y la frecuencia en las subestaciones desde donde se alimentan. El segundo enfoque se basa en obtener una representación del modelo de carga compuesto a partir del conocimiento de la mezcla de los diferentes componentes asociados [2, 4, 7]..
(36) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 26. 2.1 El enfoque basado en mediciones En este método se realizan mediciones directamente en nodos representativos y alimentadores para determinar la sensibilidad de la potencia activa y reactiva con el voltaje y la frecuencia. Estos datos se utilizan para identificar los parámetros del modelo de carga. Las variaciones del voltaje y la frecuencia se realizan de forma provocada o natural, para lo cual es necesario disponer de los equipos de medición adecuados previamente instalados. Los disturbios provocados para la adquisición de esta información se realizan por medio de la conexión y desconexión de bancos de capacitores o por los cambios manuales de taps de los transformadores. Los eventos naturales se producen sin la intervención humana, por ejemplo los cambios automáticos de taps de transformadores o el funcionamiento de los termostatos en las cargas, etc. En [4] se propone un proceso mediante el cual se pueden determinar, con relativa facilidad, las características dinámicas de cargas compuestas mediante pruebas de sistemas sencillos ante pequeñas señales. La Figura 2.1.1 muestra una configuración de prueba que pudiera ser empleada cuando las cargas se alimentan mediante dos transformadores con cambia taps.. Figura 2.1.1 Esquema mediante el cual se puede obtener un disturbio intencional [4]. Inicialmente, en uno de los transformadores se cambian los taps tratando de elevar el voltaje en tanto que en el otro se hace exactamente lo contrario.
(37) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 27. manteniendo el voltaje en el nodo constante. Bajo estas condiciones se desconecta uno de los transformadores lo que produce no solo un cambio de magnitud de voltaje sino también un cambio instantáneo en el ángulo del nodo de carga. Mediante variaciones de las posiciones iniciales de los taps, es posible obtener un rango de cambios de voltaje, tanto en la dirección positiva como en la negativa. Seleccionando apropiadamente las posiciones de los taps también es posible producir un cambio de ángulo con solo un muy pequeño cambio de voltaje. Es útil separar de los efectos de los cambios de voltaje en magnitud y ángulo de fase. Otra forma de lograr efectos similares, solo en la magnitud del voltaje, es por medio de la conexión y desconexión de capacitores. Otros autores [2] proponen pruebas de campo de una naturaleza algo parecida a la propuesta por Kundur [4], solo que por medio de una variación manual y simultánea de los taps de los transformadores operándolos por pasos donde cada uno debe representar un cambio de aproximadamente 1.67% por lo que la variación se encuentra en el orden de ±1.7%, ±3.45, ±5% en ambas direcciones de forma tal que los cambios en el voltaje no se encuentren por encima del ±5%. El esquema de la prueba propuesta por Inés Romero se muestra en las Figuras 2.1.2 y 2.1.3. En la Figura 2.1.4 aparecen los resultados de la acción de los taps de los transformadores.. Figura 2.1.2 Diagrama propuesto para una prueba de campo [2].
(38) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. Figura 2.1.3 Efecto de los taps sobre el voltaje en el nodo [2]. Figura 2.1.4 Las variaciones correspondientes de voltaje por los cambios de taps, a) -1.7%, b) +1.7%; c) -3.4%, d) +3.4%; e) -5%, f) +5% [2]. 28.
(39) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 29. Este método tiene la ventaja de supervisar directamente las verdaderas respuestas dinámicas de la carga, que son las bases para identificar los parámetros de los modelos, además, permite actualizar fácilmente los parámetros cuando las características de la carga cambian, además de que aprovecha las instalaciones existentes. Sin embargo este método tiene algunas dificultades. En primer lugar resulta insuficiente en casos en que los modelos constan de muchos parámetros, por ejemplo, los de modelo ZIP-Motor de inducción, y en segundo lugar, como las cargas varían a lo largo del día el modelo de carga puede cambiar y con él sus parámetros, por lo que es difícil encontrar una única solución que pueda integrarlo [10, 12]. Los resultados de los modelos de carga basados en mediciones no deben ser aplicados a nodos diferentes a aquellos en los que se realizaron las mediciones debido a que las componentes de la carga también lo son. Además, para tener en cuenta los cambios de composición en la carga se requieren mediciones continuas lo cual no es práctico. 2.2 Enfoque basado en el conocimiento de la composición de la carga. El enfoque basado en el conocimiento de los componentes de la carga se utiliza para determinar un modelo de carga compuesta [4]. Las informaciones de sus partes constitutivas es la mezcla de clases de carga de la subestación, composición de cada una de esas clases, y características principales de cada uno de los componentes. Para realizar esta agregación, se las clasifican como industrial, agrícola, residencial y comercial, así como sus por cientos de la carga total. Los datos de composición de la carga requieren información sobre cada clase como aires acondicionados, calefacción eléctrica, motores de la inducción, lámparas, etc. De forma general, los componentes se pueden dividir en los que tienen características dinámicas rápidas como los motores de inducción y los que las tienen lentas como las lámparas y los equipos de calor. Si estas particularidades no se conocen, se pueden obtener por medio de ensayos de laboratorio [5]..
(40) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 30. Este método tiene la ventaja de no necesitar mediciones de campo y que resulta fácil de aplicar, pero a su vez requiere conocer la composición de cada clase de componente en cada nodo que es variable en función de la época del año, las condiciones meteorológicas y otras variables. El modelado de carga por agregación de componentes es impráctico para representar su comportamiento dinámico excepto en los casos que se conozca la composición de la carga con un alto grado de confiabilidad [11]. En la Figura 2.2.1 se muestra el caso general de una carga constituida por diferentes componentes tales como: motores grandes, medianos y pequeños, dispositivos térmicos, lámparas, etc. [4].. Figura 2.2.1 Componentes de una carga compuesta en un nodo. La composición de la carga depende del día, del mes y de la estación del año, así como del clima. En los países fríos, los inviernos se caracterizan por el alto consumo de energía eléctrica principalmente relacionado a los equipos de calefacción eléctrica, mientras durante el verano el consumo es bajo debido al uso de pocas unidades de aire acondicionado. En los países más calurosos la situación es contraria, durante el verano el consumo alcanza los valores más.
(41) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 31. altos debido a muchas conexiones del aire acondicionado. El uso de aires acondicionados y las cargas caloríficas eléctricas varían estacionalmente. El consumo de los días laborables se debe fundamentalmente a los sectores industriales y comerciales, sin embargo durante los fines de semana la mayor parte de la carga es de tipo residencial. La carga agrícola varía durante el año y depende del tiempo de las cosechas, como ocurre con la industria azucarera. La composición de la carga depende del área que se analiza. En un área pequeña alimentada por redes de distribución, la composición de la carga sería más fácil para identificar .Pero en una región que abarca una extensión mayor, servida por niveles de tensión más altos es más difícil identificar los componentes de la misma. Los principales tipos de carga en Cuba son: industriales, comerciales y residenciales, agrícolas y de alumbrado público. Se debe destacar el gran peso que tiene la energía eléctrica como principal combustible doméstico ya que cada familia dispone de un módulo que comprende una hornilla, una olla de presión y una olla arrocera, además de un calentador eléctrico que juntos totalizan 3,7 kW de uso muy coincidente por la aplicación de los mismo. Una forma de estimar la composición de las cargas es apoyándose en métodos estadísticos que procesen el consumo de energía por cliente. En la Tabla 2.2.1 se muestra la distribución del consumo de energía eléctrica del país. Según esta tabla, la mayor parte del mismo (57% del total) pertenece al sector residencial. Al sector estatal le corresponde un 42.6% del total, el que a su vez se desglosa en: comercial, industrial, agropecuario y alumbrado público. De ellas, la comercial e industrial ocupan el 51.6% y 40,4% respectivamente del sector estatal. A las cargas agrícolas y de alumbrado público solo les corresponde una pequeña demanda del orden de 4.4% y 3,6% respectivamente de este sector. De forma general, se estima que las cargas, a nivel de las redes de distribución, están constituidas de forma aproximada según la Tabla 2.2.1 [13]..
(42) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 32. Tabla 2.2.1 Distribución del consumo de energía eléctrica en % por sectores De ellos Sectores. Del total. Residencial Privado residencial. Comercial. Industrial. Agropecuario. Alumbrado público. 57 no. Estatal. 0.4. 74.8. 0.3. 24.9. 0.0. 42.6. 51.6. 40.4. 4.4. 3.6. En Cuba, como ya se indicó, las cocinas y calentadores tienen un peso mayor en esta composición. 2.3 Características de algunos componentes de carga más utilizados. Normalmente los tipos de carga más frecuentes se clasifican como industriales, comerciales, residenciales y agrícolas. En el proceso industrial, la mayoría de las cargas es de los motores de inducción (más de 95% del total) [2]. En la residencia, las cargas son las cocinas, iluminaciones y aires acondicionados. La carga comercial corresponde a los aires acondicionados y un gran por ciento de lámparas descargas. En la agricultura, los motores de inducción son las cargas principales. En alumbrado público se utiliza las lámparas de descarga. Por lo tanto, los componentes de carga más utilizados pueden clasificarse como los dispositivos caloríficos, lámparas de descarga y motores de inducción. En este capítulo se aborda la forma de obtener las características más importantes de dichos componentes. 2.3.1 Lámparas de descarga Para el caso de las lámparas, Figura 2.3.1, a partir de los datos de su potencia activa y reactiva, se determinan sus características [14] mediante los siguientes cálculos:.
(43) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 33. . Figura 2.3.1 La variación de la potencia y el factor de potencia de lámpara de sodio AP corresponden a la variación del voltaje [14]. El cálculo de Pv. PV =. ln ΔP ln(110 − 80) = 1.37 = ln ΔV ln(104 − 92). Para el cálculo de Qv hay que despejar desde las curvas de P y de FP: -. En el voltaje nominal ( Vn): Q=100%Qn. -. Cuando V=92%Vn, FP=92%FPn, P=80%Pn. -. S=. -. Q = S 2 − P 2 = 87 2 − 80 2 = 34%. -. QV =. P 80 = ⋅ 100% = 87% FP 92. ln ΔQ ln(100 − 34) = =2 ln ΔV ln(100 − 92).
(44) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 34. En el caso de las lámparas de descarga, el valor Qv es mayor que valor Pv, esto quiere decir que la potencia reactiva es más sensible que la potencia activa antes de la variación del voltaje y la pendiente de Q-V es mayor que la pendiente de P-V. 2.3.2 Motores de inducción En [15] se detallan las pruebas para buscar las características de comportamiento de motores de inducción grandes y medianos. En [16] se analiza la característica Q-V de los equipos de aire acondicionado que es el caso correspondiente a los motores pequeños. La metodología y los resultados de estudios son los siguientes: El análisis se realiza a partir del circuito equivalente convencional. En dicho circuito se desprecia la resistencia asociada al hierro de la máquina y por lo tanto, en la rama de excitación se incluye solamente la reactancia de magnetización (Ver Figura 2.3.2).. Figura 2.3.2 Circuito equivalente del M.I en donde s es el deslizamiento [15]. La metodología a seguir para los diferentes casos de cargas que se consideran es: 1) Se reduce el circuito equivalente de la figura 2.3.2 por Thevenin a un circuito como el mostrado en la Figura 2.3.3 2) Se evalúa en los extremos de voltaje mínimo y voltaje máximo (en caso que el voltaje máximo sea menor que el nominal) el par de arranque y se verifica que en todos los casos el motor si acelera la carga. Este paso no es necesario cuando el motor arranca a voltaje nominal y acelera la carga. Posteriormente se presenta la disminución del voltaje..
(45) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 35. 3) En caso de acelerar la carga se procede luego, para cada Vi, a encontrar el intercepto del par de motor y el par de la carga; en otras palabras, se encuentra la velocidad de operación (o el deslizamiento) y se evalúa en este punto las potencias activa y reactiva que el motor toma de la red. Para realizar este paso se puede proceder a obtener, para cada Vi, la curva completa de Tg vs s y se halla el intercepto con la curva de carga analizada. 4) Se grafica P vs V y Q vs V y se procede, por medio de ajuste de curvas, a encontrar el modelo de P y Q para la carga estudiada y motor bajo estudio. Figura 2.3.3 Circuito simplificado [15]. En donde: Vi: Voltajes de prueba Tg: Par inducido Rth: Resistencia Thevenin Xth: Reactancia Thevenin Vth: Voltaje Thevenin. a. Ejemplo de motor grande De 1000 HP, 2200 V, 60 Hz, de 24 polos, con los siguientes parámetros: Rs = 0,137 Ω, R’r = 0,139 Ω, Xm =18 Ω, Xs = 0,572 Ω, X’r = 0,565 Ω..
(46) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 36. Figura 2.3.4 Motor de 1 000 HP con variación de voltaje desde 0,8 Vn hasta 1,2 Vn y par de carga constante de 20 000N-m [15]. b. Ejemplo de un motor mediano De 20 HP, 380V, 50 Hz, de 4 polos, con los siguientes parámetros: Rs = 0,29 Ω, R’r = 0,38 Ω, Xm =14,86 Ω, Xs = X’r = 0,85 Ω.. Figura 2.3.5 Motor de 20 HP con variación de voltaje desde 0,9 Vn hasta 1,18 Vn y par de carga constante de 80 N-m [15].
(47) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 37. c. Ejemplo de un motor pequeño Un aire acondicionado de 1220 W/5.8 A. La curva se obtiene bajo condición de plena carga en la que se desactiva la protección de voltaje en el experimento.. Figura 2.3.6 Característica Q-V de aire acondicionado bajo condición de plana carga [16]. De la comparación entre los resultados teóricos y los análisis del laboratorio se puede deducir que: -. El comportamiento de la potencia activa P es aproximadamente constante bajo la condición en la cual la carga de par constante.. -. La potencia reactiva aumenta proporcionalmente con el voltaje.. -. Los motores medianos y pequeños son más sensibles que los grandes antes de las variaciones del voltaje.. -. La curva Q-V de los equipos de aire acondicionado tiene una forma “U”, en las zonas cuyos valores están próximos al voltaje nominal. Un incremento o decremento de voltaje produce un incremento o decremento de potencia reactiva debido a las pérdidas de reactivo en el circuito de excitación. Si el voltaje cae hasta cierto punto (punto crítico,.
(48) CAPÍTULO 2: Métodos para obtener los modelos de una carga compuesta. 38. por ejemplo este caso es de 0.85 Vn), la demanda reactiva tiende a aumentar debido al incremento de las pérdidas de reactivo en las reactancias de dispersión del motor. -. El déficit de potencia reactiva en el sistema causa que se establezca el balance con un nivel bajo de voltaje. Si el voltaje está por debajo del punto crítico, la demanda de potencia reactiva aumenta rápidamente, causando el decremento brusco del voltaje. Eso produce la inestabilidad que causa el colapso de voltaje del sistema.. En la misma [16] también presentan los efectos de la variación de las potencias ante la variación del voltaje en los equipos de aire acondicionado. La Figura 2.3.7 muestra como la potencia reactiva en un nodo dado es más sensible ante un cambio de voltaje a medida que aumenta la composición de estos equipos.. Figura 2.3.7 Las curvas Q-V de la carga compuesta de diferentes porcentajes de aire acondicionado [16].
(49) CAPÍTULO 3: Materiales y métodos. 39. CAPÍTULO 3. Materiales y métodos Los conceptos fundamentales de la modelación de carga se han aplicado en una sección del Sistema Electroenergético Nacional (SEN) de Cuba, concretamente el de la región central que abarca desde Matanzas hasta Vicente en la provincia de Ciego de Ávila. Se han realizado comparaciones entre los resultados obtenidos por medio de mediciones ante variaciones bruscas del voltaje provocadas por la manipulación de bancos de capacitores y la modelación teórica de estas acciones en el nodo de Sta. Clara 33 kV. Igualmente, se ha realizado un análisis de la recuperación de la carga en los circuitos seleccionados para evaluar la precisión del modelo utilizado. 3.1 Selección del nodo en el SEN El nodo seleccionado en este estudio es la barra B 33kV de Santa Clara. En el monolineal disponible, este nodo aparece con una sola carga equivalente, sin embargo para enriquecer los estudios se han desagregados los cinco circuitos que parten de dicha barra. Estos son los numerados como: 124, 108, 119, 129, 861, cada uno de ellos con diferentes consumos y composición. En la misma barra existe un banco de capacitores fijo de 11 Mvar usado para mejorar las condiciones de operación de sistema. En cada uno de los circuitos mencionados existe un equipo de medición ION, que realiza mediciones de potencias activa, reactiva, voltajes de línea-línea y de línea-neutro cada segundo; estos datos quedan disponibles para su análisis posterior. En la Tabla 3.1.1 se muestran las cargas aproximadas de cada uno de los circuitos, y en la Figura 3.1.1 aparece el nodo B 33 kV de Santa Clara. Para poder fraccionar la carga total del nodo en sus cinco componentes, ha sido necesario definir cinco líneas sin impedancias que partiendo de la barra de 33 kV la unen con cada uno de los cinco nodos definidos..
(50) CAPÍTULO 3: Materiales y métodos. 40. Tabla 3.1.1 Carga de los cinco circuitos asociados al nodo B 33 kV de Sta. Calara CIRCUITO. MW. Mvar. 124. 5. 3. 108. 4. 2. 119. 1. 1. 129. 3. 2. 861. 4. 2. Figura 3.1.1 El nodo B 33kV y sus cincos circuitos.. Características de los circuitos: -. El 124 alimenta el centro de la ciudad..
(51) CAPÍTULO 3: Materiales y métodos -. El 108 es urbano rural. -. El 119 es urbano rural. -. El 129 es urbano rural. -. El 861 es básicamente industrial. 41. 3.2 Mediciones de campo Las acciones para provocar el disturbio y la realización simultánea de las mediciones durante el proceso se han creado por medio de la manipulación del banco de capacitores. Los efectos del “switching” de los capacitores (apertura y cierre con la autorización del Despacho) se manifiestan como una variación brusca del voltaje en dicho nodo, y en los aledaños. La duración del “switching” se estudia durante alrededor de 10 segundos, pero la manipulación real se extiende por varios minutos. Los instrumentos de medición (ION) registran las lecturas de potencia activa (P), reactiva (Q) y voltaje (V) antes, durante y después del proceso en cada circuito. Esta información se edita en una hoja de cálculo Excel para determinar con ella los cálculos de los exponentes Pv (np) y Qv (nq) que se analizan con ayuda del software PSX. Estos ensayos se realizan a diferentes horas del día, para tomar instantes con disímiles composiciones de carga. -. A las 7 de la mañana.. -. A las 10 de la mañana.. -. A las 12 del mediodía.. -. A las 3 de la tarde.. -. A las 6 de la noche.. A las 7 de la mañana, 12 del mediodía y 7 de la tarde, la mayor parte de consumo se corresponde con las cargas residenciales, en tanto que a las 10 de la mañana y 3 de la tarde, existe una mayor presencia de cargas.
(52) CAPÍTULO 3: Materiales y métodos. 42. pertenecientes al sector comercial e industrial. Estas características de los comportamientos de carga se muestran en las figuras.. Figura 3.2.1 Potencias activa y reactiva de un día típico del circuito 124. Los gráficos horarios de los demás circuitos se pueden ver en el Anexo 2. Los resultados del ensayo realizado el 9 de febrero del 2011 a las 7:23 a.m. se muestran en la Tabla 3.2.1, donde Prom es valor promedio y Suma es la suma de los datos. Las tablas correspondientes a las otras horas aparecen en el Anexo 3 Tabla 3.2.1 Mediciones realizadas el 9 de febrero de 2011 a las 7: 23 a.m Circuito. Hora. Vinicial. Vfinal. Pinicial. Pfinal. Qinicial. Qfinal. 124. 23:49. 35399. 33749. 4709. 4450. 2488. 2006. 108. 23:49. 35358. 33693. 3580. 3365. 2291. 1820. 119. 23:51. 35168. 33526. 1188. 1153. 751. 639. 129. 23:46. 35363. 33725. 2867. 2730. 1558. 1325. 861. 23:46. 35207. 34470. 3968. 3867. 2029. 1760. 35299. 33833. 16312. 15565. 9117. 7550. Prom/Suma.
(53) CAPÍTULO 3: Materiales y métodos. 43. 3.3 Análisis de los datos de medición Con los valores (iniciales y finales) medidos se calculan los exponentes Pv, Qv y las pendientes ∂P/∂V, ∂Q/∂V del modelo, mediante. ⎛ P final ln⎜ ⎜P inicial Pv = ⎝ ⎛ V final ln⎜ ⎜V ⎝ inicial. ⎞ ⎟ ⎟ ⎠ ⎞ ⎟ ⎟ ⎠. 3.1. ⎛ Q final ⎞ ⎟ ln⎜ ⎜Q ⎟ inicial ⎠ ⎝ Qv = ⎛ V final ⎞ ⎟ ln⎜ ⎜V ⎟ ⎝ inicial ⎠. 3.2. ∂P Pfinal - Pinicial = ∂V Vfinal - Vinicial. 3.3. ∂Q Qfinal - Qinicial = ∂V Vfinal - Vinicial. 3.4.
(54) CAPÍTULO 3: Materiales y métodos. 44. Los resultados se presentan en las tablas siguientes: Tabla 3.3.1 Los valores de exponentes Pv y Qv calculados con los datos de medición Hora. 7:23 horas. 10:06 horas. 11:52 horas. 15:08 horas. 18:19 horas. Circuito. Pv. Qv. Pv. Qv. Pv. Qv. Pv. Qv. Pv. Qv. 124. 1.19. 4.5. 1.25. 3.93. 1.57. 3.68. 1.1. 3.69. 1.73. 3.64. 108. 1.28. 4.77. 1.2. 4.35. 1.59. 5.45. 0.93. 4.58. 1.68. 4.25. 119. 0.63. 3.38. 1.07. 3.56. 1.68. 4.66. 1.49. 4.64. 1.5. 3.26. 129. 1.03. 3.4. 0.96. 3.19. 0.77. 2.55. 0.97. 3.54. 1.23. 3.32. 861. 1.22. 6.72. 1.09. 4.06. 0.9. 4.57. 0.81. 3.82. 1.6. 5.08. Conjunto. 1.1. 4.45. 1.13. 3.9. 1.26. 4.13. 0.98. 3.94. 1.7. 4.25. Tabla 3.3.2 Valores de exponentes ∂P/∂V, ∂Q/∂V calculados con los datos de medición Hora. 7:23 horas. 10:06 horas. 11:52 horas. 15:08 horas. 18:19 horas. Circuito. ∂P ∂V. ∂Q ∂V. ∂P ∂V. ∂Q ∂V. ∂P ∂V. ∂Q ∂V. ∂P ∂V. ∂Q ∂V. ∂P ∂V. ∂Q ∂V. 124. 0.16. 0.29. 0.19. 0.30. 0.28. 0.27. 0.17. 0.28. 0.37. 0.34. 108. 0.13. 0.28. 0.13. 0.29. 0.19. 0.32. 0.09. 0.29. 0.30. 0.31. 119. 0.02. 0.07. 0.03. 0.07. 0.05. 0.07. 0.04. 0.08. 0.08. 0.07. 129. 0.08. 0.14. 0.08. 0.14. 0.08. 0.11. 0.08. 0.16. 0.15. 0.18. 861. 0.14. 0.36. 0.15. 0.29. 0.14. 0.33. 0.11. 0.26. 0.21. 0.22. Conjunto. 0.50. 1.07. 0.58. 1.09. 0.74. 1.09. 0.50. 1.06. 1.20. 1.20.
(55) CAPÍTULO 3: Materiales y métodos. 45. La representación gráfica de Pv y Qv durante el día se muestran en las Figuras 3.3.1 y 3.3.2.. Figura 3.3.1 Comportamiento de Pv durante el día. De estos gráficos se puede observar que: 1. Los mayores valores de Pv ocurren en las horas en que mayor uso tienen los equipos domésticos de elaboración de los alimentos: 11:30 a.m. y 6:30 p.m. 2. Los menores valores de Pv ocurren en el horario de los picos laborales que es donde mayor uso existe de los motores eléctricos, esto es alrededor de las 3:00 p.m. 3. El comportamiento del “Conjunto” está caracterizando para un nodo donde hay combinación de cargas residenciales con alto valor de Pv debido a las cocinas eléctricas, y cargas industriales con bajo valor de Pv debido al predominio de los motores eléctricos, pero en diferentes. horarios..
(56) CAPÍTULO 3: Materiales y métodos. Figura 3.3.2 comportamiento de Qv durante el día. Un análisis de Qv conduce a conclusiones similares a las hechas para Pv.. 46.
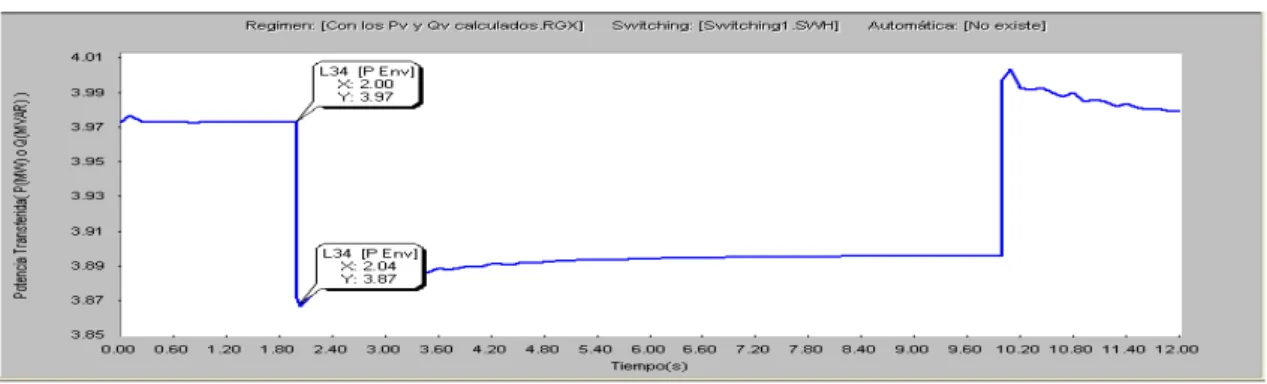
(57) CAPÍTULO 3: Materiales y métodos. 47. 3.4 Procesos de la simulación a) Como paso previo a la manipulación de los capacitores es necesario introducir en el PSX las mismas condiciones iniciales: voltaje en la barra y potencia en los circuitos, lo que se realiza ajustando el tap del transformador 110/33 que alimenta a la barra B 33kV, y fijando las potencias en los recibos de cada uno de los cinco nodos. b) Los valores de Pv y Qv obtenidos para cada carga por medio de las mediciones, se introducen en el modelo de la carga del PSX (Modo Estabilidad), Figura 3.4.1.. Figura 3.4.1 Introducción de Pv y Qv en el PSX (Barra en el modo Estabilidad). c) Con el PSX el “switching” de los capacitores introduciendo el tiempo de apertura y cierre del interruptor de los mismos, y se ejecuta la corrida. Las corridas de estabilidad con el PSX requieren que se hayan definido y asignado previamente los modelos de las máquinas sincrónicas. Los ajustes de taps de transformador 110/33 kV y los procesos para lograr los resultados se muestran en el Anexo 4. El efecto del “swicthing” de los capacitores se manifiesta en el voltaje del nodo donde los mismos están ubicados, Figura 3.4.2, y en los próximos, así como en las cargas de los cinco nodos asociados a la barra de 33 kV, Figuras 3.4.3 y 3.4.4..
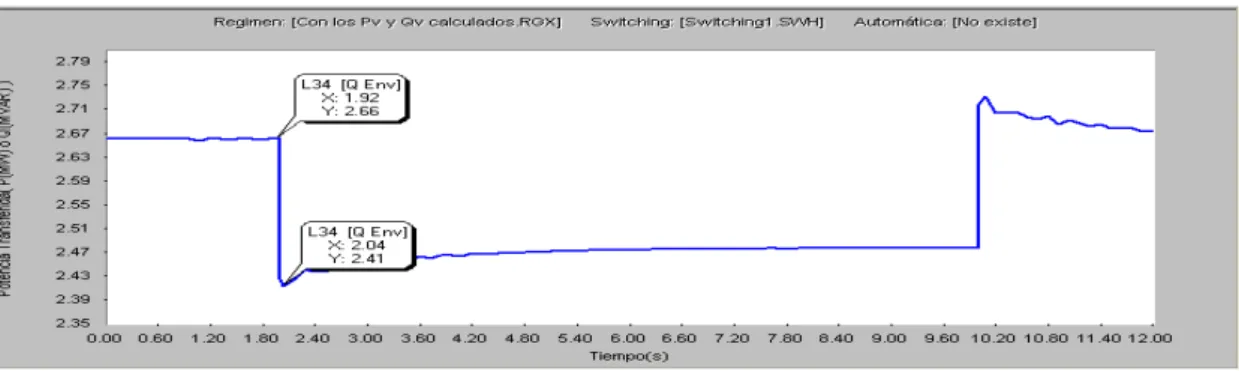
(58) CAPÍTULO 3: Materiales y métodos. 48. Figura 3.4.2 Efecto del “switching” de los capacitores sobre el voltaje en la barra CLARV33B para el caso del 9 de febrero del 2011 a las 7:23 a.m.. De igual forma se procede para ver la variación de las potencias activas y reactivas en cada nodo, Figuras 3.4.3 y 3.4.4.. Figura 3.4.3 Efecto del “switching” de los capacitores sobre la potencia activa en la línea L30 CLARV33B 124 para el caso en el 9 de febrero del 2011 a las 7:23 a.m.. Figura 3.4.4 Efecto del “switching” de los capacitores sobre la potencia reactiva en la línea L30 CLARV33B 124 para el caso en el 9 de febrero del 2011 a las 7:23 a.m..
(59) CAPÍTULO 3: Materiales y métodos. 49. En las figuras del Anexo 5 se muestra el efecto del “switching” de los capacitores sobre el voltaje, las potencias activa y reactiva de los cincos circuitos para otros casos de mediciones realizadas el 9 de febrero del 2011. d) Los resultados alcanzados con el PSX por efecto de cambio brusco de voltaje sobre los cinco circuitos se muestran en las siguientes tablas. Tabla 3.4.1 Resultados del efecto del cambio brusco del voltaje sobre los cinco circuitos para el caso de las mediciones realizadas el 9 de febrero del 2011 a las 7:23 horas, obtenidos por simulación con el PSX Circuito. Vi (33B). Vf(33B). Pinicial. Pfinal. Qinicial. Qfinal. 124. 35.4. 34.45. 4.70. 4.57. 2.5. 2.24. 108. 35.4. 34.45. 3.58. 3.47. 2.3. 2.09. 119. 35.4. 34.45. 1.19. 1.17. 0.75. 0.69. 129. 35.4. 34.45. 2.87. 2.80. 1.56. 1.44. 861. 35.4. 34.45. 3.97. 3.87. 2.04. 1.73. Los resultados de los demás horarios se muestran en el Anexo 6 3.5 Comparaciones de resultados Los resultados obtenidos por medición y los alcanzados por el PSX deben ser confrontados, y esto se realiza mediante la comparación de las potencias activa y reactiva al final del “swicthing”, o sea las de la medición con el ION y las de simulación con el PSX. Esta comparación se muestra en la siguiente tabla para las 18:19 horas, el resto se encuentran en el Anexo 7 Tabla 3.5.1 Comparación de las potencias activa y reactiva finales entre mediciones de ION y PSX para el caso de mediciones realizadas el 9 de febrero del 2011 a las 18:19 horas.
(60) CAPÍTULO 3: Materiales y métodos. 50. En la tabla de comparación se puede observar que hay muy poca diferencia entre los valores de medición (ION) y los de simulación (PSX), apenas del orden del 4.2% para las mayores desviaciones. 3.6 Análisis de la recuperación de carga Uno de los aspectos de mayor interés en la obtención de un modelo de carga dinámico confiable, lo constituye el análisis de la recuperación de la potencia ante variaciones rápidas de la tensión. Como se indicó en el capítulo 1, los dos aspectos que más influyen en este proceso son la acción de los taps de los transformadores reguladores de tensión, que de forma automática actúan para recuperar la tensión perdida, y la existencia de cargas termostáticas, que de forma similar operan para conectar a la red estos equipos debido a la pérdida de calor experimentada por la disminución del voltaje. La información extraída de las mediciones permite realizar un análisis de este fenómeno mediante la representación gráfica del comportamiento de las variaciones de las potencias activa y reactiva de cada circuito durante el tiempo de “switching” de los capacitores para buscar la recuperación de carga. En la Figura 3.6.1 se muestran las variaciones del voltaje, las potencias activa (P) y reactiva (Q) del circuito 124 durante el tiempo de duración del “switching”. En la Figura 3.6.2.aparece la curva de la recuperación de la P y la Q del mismo circuito, así como las ecuaciones de las mismas..
Figure




+7




Documento similar
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
En nuestra opinión, las cuentas anuales de la Entidad Pública Empresarial Red.es correspondientes al ejercicio 2010 representan en todos los aspectos significativos la imagen fiel
En nuestra opinión, las cuentas anuales de la Entidad Pública Empresarial Red.es correspondientes al ejercicio 2012 representan en todos los aspectos
La Intervención General de la Administración del Estado, a través de la Oficina Nacional de Auditoría, en uso de las competencias que le atribuye el artículo 168
La Intervención General de la Administración del Estado, a través de la Oficina Nacional de Auditoría, en uso de las competencias que le atribuye el artículo
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
