Diseño y construcción de un dispositivo para la localización de mascotas
53
0
0
Texto completo
(2) AGRADECIMIENTOS En primera instancia agradecemos a Dios que nos permitió culminar de manera correcta, la idea de proyecto que hace ya algunos meses nos planteamos. Agradecemos a nuestras familias y amigos, que siempre estuvieron atentos al desarrollo del proyecto. Al ingeniero Felipe Arroyave le agradecemos su inmenso compromiso como nuestro director de proyecto, al siempre estar pendiente de los avances y motivándonos para continuar y realizar las mejores acciones. Agradecemos en gran medida al Ing. de sistemas Oscar Granada, por su gran colaboración durante la etapa de programación del collar. A los ingenieros Carlos Rodríguez y Leodilber Daza, por su constante y comprometida ayuda en la parte electrónica y de diseño del collar.. 2.
(3) TABLA DE CONTENIDO. Pág. INTRODUCCIÓN ..................................................................................................... 7 1. HISTORIA DE LOS SISTEMAS DE LOCALIZACIÓN ....................................... 9 1.1. JONES LIVE MAP .................................................................................. 9. 1.2. SISTEMA LORAN (LONG RANGE NAVIGATION) ................................. 9. 1.3. LOCALIZADOR GPS ............................................................................ 11. 1.4. SISTEMA GPRS ................................................................................... 12. 2. FUNCIONAMIENTO DE LOS GPS Y GPRS/GSM ......................................... 14 2.1. FUNCIONAMIENTO DE LOS GPS ....................................................... 14. 2.2. MEDICIÓN DE LA DISTANCIA DE UN SATÉLITE ............................... 14. 2.4. SEÑAL GPS ............................................................................................. 16 2.5 MEJORAMIENTO DE LOS SISTEMAS DE POSICIONAMIENTO ............. 17 2.6 FIABILIDAD DE LOS DATOS..................................................................... 17 2.7 FUENTES DE ERROR ............................................................................... 17 2.7.1 Factores que Afectan la Calidad de los Datos:................................................. 17. 2.8 APLICACIONES ACTUALES DEL GPS ..................................................... 19 2.9 SISTEMA GPS ASISTIDO (AGPS) ............................................................ 19 3. COMPONENTES DEL COLLAR Y SOFTWARE EMPLEADO........................ 20 3.1. MÓDULO GPRS M95 ............................................................................ 20. 3.2. MÓDULO GPS L80 ............................................................................... 21. 3.3. MICROCONTROLADOR ARDUINO ..................................................... 21. 3.4. UNIDAD ELÉCTRICA ............................................................................ 22. 3.4.1. Batería de prueba ....................................................................................... 22. 3.4.2. Batería Litio-Ion. ......................................................................................... 22. 3.5. CARCASA ............................................................................................. 23. 4. LENGUAJES DE PROGRAMACIÓN Y COMUNICACIÓN APLICADOS EN EL MÓDULO .......................................................................................................... 24 4.1. CÓDIGO DE COMUNICACIÓN DEL MÓDULO M95 Y L80 .................. 24. 4.2. PROGRAMACIÓN ARDUINO ............................................................... 25. 4.3. ESTRUCTURA DEL PROGRAMA DE ENVIÓ ...................................... 26. 3.
(4) 4.3.1 Descripción del programa ................................................................................ 27. 5. EVALUACIÓN DE LOS SISTEMAS DE LOCALIZACIÓN GPS Y GPRS IMPLEMENTADOS EN EL MÓDULO .................................................................... 32 5.1. PRUEBAS DEL MÓDULO M95 ............................................................. 32. 5.2 MONTAJE ELÉCTRICO PARA COMUNICACIÓN Y PROGRAMACIÓN POR PUERTO SERIAL .................................................................................... 33 5.3 DESARROLLO DE LA PROGRAMACIÓN E INTEGRACIÓN PARA EL SHIELD M95..................................................................................................... 34 5.4 PRUEBAS Y RESULTADOS DE LA LOCALIZACIÓN POR MEDIO DEL GPRS .............................................................................................................. 36 5.5 PRUEBAS Y RESULTADOS DE LA LOCALIZACIÓN POR MEDIO DEL GPS .............................................................................................................. 37 5.6 5.6.1. COMPARACIÓN DEL SHIELD GPRS/GSM Y GPS ............................. 42 Pruebas ...................................................................................................... 42. 6. DISEÑO DE LA TARJETA DE LOCALIZACIÓN ............................................. 45 CONCLUSIONES .................................................................................................. 52 BIBLIOGRAFIA ...................................................................................................... 53. 4.
(5) LISTA DE FIGURAS Pág. Figura 1. Jones live Map .......................................................................................... 9 Figura 2. Esquema del envió de señales usado por el LORAN ............................. 10 Figura 3. Red satelital GPS ................................................................................... 12 Figura 4. Aplicación QLocator ................................................................................ 13 Figura 5. Determinación de la posición por 3 satélites ........................................... 14 Figura 6. Tiempo de demora de la señal de acuerdo a la señal ............................ 15 Figura 7. Segmentos GPS ..................................................................................... 16 Figura 8. Módulo M95 ............................................................................................ 20 Figura 9. Módulo GPS L80 .................................................................................... 21 Figura 10. Arduino Duemilanove............................................................................ 21 Figura 11. Bateria Li-ion 18650 .............................................................................. 22 Figura 12. Batería litio-ion ...................................................................................... 23 Figura 13. Carcasa collar localizador ..................................................................... 23 Figura 14. Placa para protoboard M95 .................................................................. 32 Figura 15. Localización automática desde la aplicación del QNavigator ............... 33 Figura 16. Conexión eléctrica entre el arduino y el GPRS ..................................... 34 Figura 17. Shield GSM/GPRS M95 para Arduino .................................................. 34 Figura 18. Programa QFlash ................................................................................. 35 Figura 19. Datos enviados a UBIDOTS por localización por GPRS ...................... 36 Figura 20. Shield GPRS/GSM M95 GPS L80 ........................................................ 37 Figura 21. Secuencia de comandos para verificación GSM .................................. 38 Figura 22. Secuencia de Comandos para verificación de funciones del GPS ....... 39 Figura 23. Progreso de las coordenadas GPS durante los primeros minutos de funcionamiento....................................................................................................... 39 Figura 24. Comparación de las coordenadas GPS y GPRS con respecto a la posición real ........................................................................................................... 41 Figura 25. Coordenada1: lat: 4.838062, lng: -75.67565......................................... 42 Figura 26. Coordenada2: 4.837386, -75.677134 ................................................... 43 Figura 27. Recorrido de la prueba de localización 7 de Septiembre ...................... 44 Figura 28. Conexiones Microcontrolador ATmega 328 .......................................... 45 Figura 29. Esquema de conexiones eléctricas de la tarjeta diseñada ................... 46 Figura 30. Circuito eléctrico de la tarjeta ................................................................ 49 Figura 31. Configuración eléctrica del circuito de alimentación ............................. 50 Figura 32. Circuito eléctrico para el switch de encendido ...................................... 50 Figura 33. Conexiones necesarias del módulo GPS L80 ....................................... 51. 5.
(6) LISTA DE TABLAS Pág. Tabla 1. Valores corrientes de las fuentes de error ............................................... 18 Tabla 2. Comandos AT .......................................................................................... 24 Tabla 3 Comparación de posicionamiento por diferentes sistemas ....................... 42. 6.
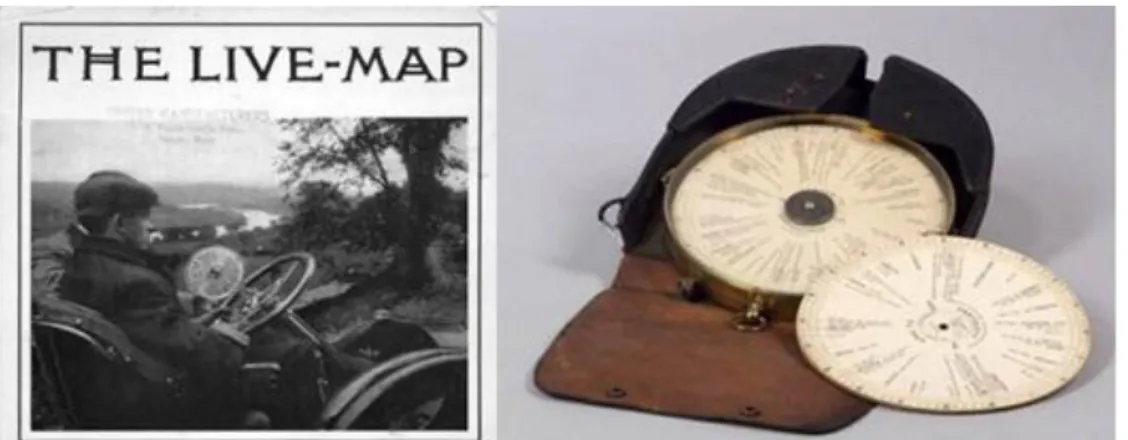
(7) INTRODUCCIÓN El posicionamiento satelital en la actualidad es fundamental dentro de la industria y tiene aplicaciones en el campo militar, instrumental, climático, y otros. Esta necesidad de localizar los objetos se ha incluido tanto que se ha hecho indispensable conocer la posición de los barcos, aviones, vehículos de transporte de carga, objetos personales y personas, ya sea para fines informativos o de seguridad. La localización empezó por el sistema Jones Live Map que data de 1909, el dispositivo consistía en varios aros de papel conectados al odómetro del vehículo e indicaban direcciones, rutas y características geográficas de la carretera. En la década de los treinta y cuarenta con el avance tecnológico impulsado por la segunda guerra mundial, se empezó a investigar y trabajar en sistemas que permitieran obtener la coordenada de los elementos de principal interés. En 1940 se desarrolló el sistema de navegación de largo alcance Loran por sus siglas en inglés (LOng RAnge Navigation), contemporáneo al sistema europeo Glonass, algo más cerca a la actualidad se crearon los sistemas (Global position System) o GPS, desarrollado por el departamento de defensa de los Estados Unidos en la década de los 60 y finalmente el GPRS (General Packet Radio Service) apoyado en él envió de datos a través de la red de telefonía móvil. El propósito de estos sistemas ha sido el de proporcionar una ubicación cada vez con mayor precisión, para la indicación de rutas, descripciones de los alrededores además de las coordenadas, tal y como lo realiza el GPS. El avance en la tecnología de la localización ha sido exponencial con respecto a los sistemas que ha logrado integrar, hasta el nivel que hoy en día casi cualquier persona le lleva consigo en el bolsillo.Una persona actualmente puede ubicarse y ser ubicada de una manera fácil y rápida por medio del GPS incluido en los teléfonos inteligentes, permitiendo saber en segundos, la ruta que ha seguido, el rumbo tomado y en un instante, las coordenadas del lugar donde se encuentra. Una aplicación particular de los sistemas de localización se aplica a las mascotas, en las que por medio de los collares se instala un localizador tal y como se ha realizado con animales salvajes para fines de investigación. En este proyecto se desarrolla una la aplicación de un sistema de localización basada en la tecnología GPS y GPRS para la construcción de un collar localizador de mascotas llamado PET Locator, empleando un microcontrolador arduino para controlar el dispositivo. Los primeros collares para la ubicación de mascotas fueron de rastreo por radio frecuencia, limitándose a un radio de alcance de acuerdo a la capacidad del dispositivo. Actualmente se ha incluido el sistema GPS en estos collares permitiendo un alcance global para su operación. La localización de las macotas se ha concentrado en el aspecto de la seguridad y el rastreo. 7.
(8) La mayoría de los dispositivos del mercado pueden trabajar únicamente con el GPS para obtener la ubicación, el dispositivo Pet Locator implementa el GPS y GPRS para lograr este mismo objetivo, de esta manera sí el protocolo de comunicación GPS no se confirma, el sistema podrá dar una posición inicial mediante triangulación con la red celular GPRS. El sistema permite obtener la posición de la mascota de acuerdo a una frecuencia determinada por el usuario, la cual es posible observar en la plataforma de Google Maps, apoyado en el servidor de UBIDOTS1. Se espera que el dispositivo ayude a las persona mantenga informada sobre la localización de su mascota, evitando la perdida y preocupándose por la alimentación de esta. El objetivo principal del proyecto es diseñar y construir un dispositivo para la localización de mascotas, teniendo en cuenta los siguientes objetivos específicos: Estudiar el funcionamiento de los módulos GPS y GPRS/GSM. Revisión del estado de la técnica de los dispositivos existentes y sus funciones. Selección y evaluación de los sistemas de localización GPS y GPRS para ser implementados en el módulo. Desarrollo del programa de control para el microcontrolador. Diseño y ensamble del módulo Realizar las prueba de funcionamiento Los inconvenientes encontrados en el desarrollo y construcción del sistema se debieron a la poca la información bibliográfica sobre el funcionamiento e implementación de estos dispositivos. Este trabajo establece la documentación y podría ser un referente de diseño y desarrollo de este tipo de dispositivos.. 1. Ubidots: Plataforma para envió de datos en tiempo real.. 8.
(9) 1. HISTORIA DE LOS SISTEMAS DE LOCALIZACIÓN. 1.1 JONES LIVE MAP El sistema Jones Live Map fue desarrollado por J. W. Jones 2 en 1909 cuando entraba en auge la cultura de la conducción y consigo los viajes más largos. En estos años los mapas que se poseían de las ciudades no contaban con suficientes detalles para las rutas extensas, debido a esto se introdujo en la localización personal de los vehículos como un sistema que se encontraba unido al odómetro haciendo girar un disco de papel cada que este se moviese, y de esta manera ir moviendo una aguja que permitía ir visualizando las rutas que habían entre dos ciudades, además de detalles de los lugares, áreas de interés y características geográficas. En la figura 1 se muestra el dispositivo con varios discos en su interior. [1] Figura 1. Jones live Map. Fuente: Nilsson, J (2012), The First GPS: High-Tech Navigation in 1909 [Figura] Recuperado de http://www.saturdayeveningpost.com/2012/02/04/history/postperspective/gps-1909.html El problema que presentó el Jones Live Map fue el rápido aumento de carreteras en las ciudades lo que hizo que fuese necesario actualizar todas las hojas de rutas que tenían, razón por la cual en la década de los 20 encontró su fin cuando la correcta señalización en las autopistas de los Estados Unidos se completó. 1.2 SISTEMA LORAN (LONG RANGE NAVIGATION) El sistema de localización LORAN fue desarrollado en la década de los cuarenta en los Estados Unidos, su funcionamiento radica en el retraso que se presenta en 2. J. W. Jones: fue el creador de sistemas como el velocímetro Jones, el disco fonográfico Jones y el Jones Yobel.. 9.
(10) la recepción de señales de radio que son transmitidas desde tres o más torres de emisión para así estimar la ubicación tal y como se observa en la figura 2. Figura 2. Esquema del envió de señales usado por el LORAN. Fuente: CasaElizabeth, M (s.f), Sistema de Navegación Hiperbólico de Largo Alcance – LORAN-C [Figura] Recuperado de http://mecg.es/archivos/AST2%20%20Bloque2.pdf El desarrollo del sistema LORAN se dio en medio de la segunda guerra mundial, previsto como la solución a la correcta navegación y ubicación de las aeronaves y navíos que se encontraban en campo, la propuesta original fue hecha por Alfred Lee Loomis, y poseía una precisión de alrededor de 1.5 km dentro de un rango de 320 km y 800 km para las aeronaves con largos trayectos. El sistema de navegación hiperbólica en sus inicios contaba con dos principios en funcionamiento, el de cronometraje de pulsos y el de sincronización de fase. De esta manera se hacía necesario que el sistema de comparación tuviese un sistema alterno de menor precisión que permitiese la eliminación de la ambigüedad en la obtención de la posición. Varios intentos se hicieron para lograr reducir los errores de las posiciones que el sistema original LORAN estaba proveyendo. La guardia costera americana en su afán por conseguir un sistema más preciso para implementar en operaciones de largo alcance logro desarrollar un sistema experimental llamado LF LORAN, con una operación con rangos de muy baja frecuencia alrededor de 180 kHz, menores que las del LORAN inicial. La verificación del nuevo sistema incluyo viajes tan largos como los realizados a Sur 10.
(11) América en Brasil, con resultados alentadores que le permitieron emplearlo en la Operación Muskox en el ártico, debido a que el rango de precisión se había reducido hasta los 46m, a pesar de las mejorías luego de dos años de funcionamiento fue retirado por la complejidad de interpretar los datos en la práctica. Con la introducción de aeronaves más pequeñas Sperry Giroscopio incursiono en los sistemas de localización con CYCLAN un sistema que incluía automatización y una operación en la banda entre 90 y 100 kHz permitiendo que se empleara solo un sistema referencial encontrando como único impedimento de su avance el alto costo en la época de los componentes electrónicos. En 1953 fue modificado y mejorado dando como resultado el sistema Cytac agregando cartas de correcciones especificas en sus cálculos de posicionamiento. Varias modificaciones en funcionamiento y la significativa reducción en el tamaño de los componentes y así de sus precios llevaron a que en 1974 entrar a funcionar para el público el sistema LORAN-C que desde entonces ha funcionado continuamente en el continente europeo, mientras que en Estados Unidos y Canadá se apagaron las estaciones de funcionamiento. [2] 1.3 LOCALIZADOR GPS Es el primer sistema de navegación basado en satélites. Entra en operación en 1960 cuando los departamentos de defensa y transporte de Estados Unidos, se interesan en desarrollar este sistema de ubicación mediante satélites. Dicho sistema tenía que cumplir con ciertas exigencias para posibilitar su uso en la aviación y precisión. Sistema TRANSIT o NAVSAT (Navy Navigation Satellite System) sistema de la marina de navegación por satélite, se servía de seis satélites logrando una posición cada 15 minutos con un error en la señal de 250 m. Al transcurrir el tiempo dicho error se fue mejorando cuando entran en funcionamiento los relojes atómicos, esto relojes lo portaba cada satélite, cada uno de ellos sincronizados a una misma base de tiempo. Pero esto no era suficiente para lograr la precisión que se exigía, por lo tanto en 1973 se une la fuerza armada y la fuerza aérea de los E.E.U.U y entra un nuevo sistema el cual tomo como nombre NAVSTAR GPS (programa de tecnología de navegación) que consistía en una señal modulada acompañada de un código PRN (Pseudo-Random Noise: ruido pseudo-aleatorio) [8]. Se inicia un nuevo sistema llamado GPS el cual contaba con 24 satélites en órbita como se ilustra en la figura 3, ofrecía ubicarse de una manera autónoma e individual dicho sistema solo era para la las fuerzas de los estados unidos, pero debido a un ataque de la Unión soviética a una aéreo línea por error llevo a que este sistema tuviera acceso para los civiles sin ninguna restricción. 11.
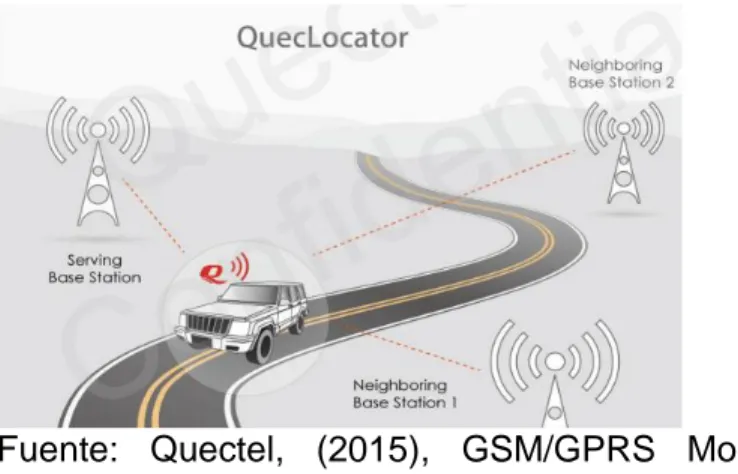
(12) Figura 3. Red satelital GPS. Fuente: Elizabeth, H (2013), Navstar: GPS Satellite Network [Figura] Recuperado de http://www.space.com/19794-navstar.html 1.4 SISTEMA GPRS Este sistema es un desarrollo posterior al Sistema Global para Comunicaciones Móviles (Global System for Mobile Communications o GSM), que envía los datos por conmutación de paquetes. EL GPRS surge por la necesidad de enviar datos de manera más eficiente a través de los dispositivos celulares que ya eran capaces de transmitir voz, siendo una evolución alterna al GSM. Esta tecnología fue diseñada para corregir los errores que tenía el GSM en cuanto a la transmisión de datos, permitiendo que el canal se ocupase solo mientras se estaba haciendo uso de él, de manera que el cobro se realizaría solo por conexión establecida, conociéndose este procedimiento como conmutación por paquetes [10],[11]. La localización a través del sistema GPRS no se ha trabajado mucho en contraste con lo realizado con el GPS, sin embargo el fabricante de componentes electrónicos y de desarrollo QUECTEL ha creado una aplicación llamada QLocator, que permite obtener una posición georeferenciada desde su módulo GPRS/GSM M95. Esta aplicación depende de una conexión de datos a través de la simcard integrada en los shields que emplean este módulo, permitiendo realizar un procedimiento de triangulación mediante las antenas de telefonía móvil, obteniendo una posición en grados decimales; realizando esta operación desde la aplicación QNavigator 3 en un ordenador la localización podrá visualizarse a través. 3. QNavigator: Aplicación interactiva desarrollada por Quectel para la comunicación e introducción al manejo de sus módulos.. 12.
(13) de Google Maps. La figura 4 es una representación del procedimiento de localización por GPRS de Quectel. Figura 4. Aplicación QLocator. Fuente: Quectel, (2015), GSM/GPRS Module Series. Family QuecLocator Application Note. Recuperado el 10 de septiembre de 2015, de http://www.quectel.com/UploadImage/Downlad/Quectel_QuecLocator_Application_ Note_V3.4.pdf. 13.
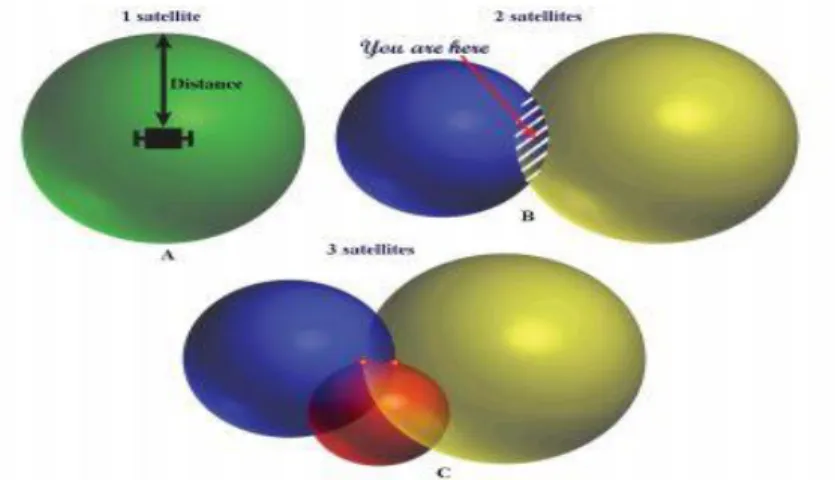
(14) 2. FUNCIONAMIENTO DE LOS GPS Y GPRS/GSM 2.1 FUNCIONAMIENTO DE LOS GPS El sistema de posicionamiento global (GPS) es un sistema que permite determinar en cualquier parte del mundo la posición de un objeto, una persona, un vehículo o hasta mascotas. La trilateración es el método que el GPS emplea para obtener la posición, por medio de una red de satélites colocados en órbita a una altura de 20200 km; el GPS como mínimo debe localizar 4 satélites. Obteniendo la distancia a un satélite y sabiendo que el radio es la misma distancia, se crea una esfera con el radio calculado, de igual forma se realiza con los otros dos satélites para identificar los puntos de intercepción. Ya conociendo los puntos de intercepción de las 3 esferas, la cuarta medida sirve para saber cuál de los dos puntos que se interceptan es el correcto; el punto que cruce es la posición correcta el otro es un valor erróneo. La figura 5 muestra el hallazgo de los dos posibles puntos de intercepción. [4] Figura 5. Determinación de la posición por 3 satélites. Fuente: Jorge R. Rey (s.f.) El Sistema de Posicionamiento Global - GPS Recuperado el 10 de Octubre de 2015, del Sitio Web del Instituto de Alimentos y Ciencias Agrícolas. Universidad de Florida, Gainesville: https://edis.ifas.ufl.edu/pdffiles/IN/IN65700.pdf 2.2 MEDICIÓN DE LA DISTANCIA DE UN SATÉLITE La medición de la distancia que hay entre un satélite y el receptor se basa mediante la propagación de ondas electromagnéticas, dónde el tiempo en que 14.
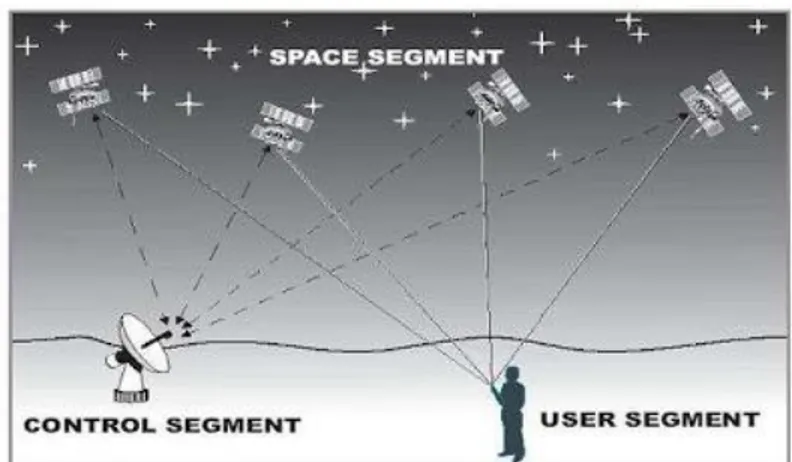
(15) tarda una señal al llegar al receptor es proporcional al distancia que recorre, dichas señales se propagan en un orden de 300.000 km/s. El receptor mide el tiempo en que tarda en llegar la señal al objeto como se ve en la figura 6, al mismo tiempo el satélite proporciona la hora a la que se ha emitido la señal; se compara la hora de emisión y recepción así se calcula la distancia, llamada también pseudodistancia [5]. Figura 6. Tiempo de demora de la señal de acuerdo a la señal. Fuente: Paul Correia, 2000, Tiempo de propagación de la señal emitida por un satélite, imagen tomada de Guía práctica del GPS, traducción al español 2002, Barcelona, p. 19. 2.3 COMPOSICIÓN DEL SISTEMA GPS El sistema GPS está compuesto por tres sistemas o segmentos; el segmento espacial que está conformado por los satélites, el segmento de control compuesto por todas las estaciones de control y el segmento correspondiente a los receptores GPS, denominado segmento de usuario, a continuación se describe cada segmento del sistema GPS [5]. La figura 7 muestra los tres segmentos. 2.3.1 SEGMENTO ESPACIAL Se encuentran 24 satélites distribuidos de manera que encada una de las seis orbitas se encuentran cuatro satélites. Se localizan a una altitud de 20.200 km con un periodo de 11 h 58 min (12 horas sidéreas) con una inclinación de 55 grados respecto al ecuador. 15.
(16) 2.3.2 SEGMENTO DE CONTROL Se refiere a las estaciones terrestres, que cuenta con una estación principal con 4 antenas, más 5 estaciones de monitoreo en Colorado Springs; Hawái, Isla de Ascensión, Kwajalein. 2.3.3 SEGMENTO DE USUARIO (RECEPTORES GPS) El segmento de usuario consiste en los dispositivos receptores GPS que se encargan de captar la señal emitida por los satélites. El dispositivo receptor GPS trabaja a dos frecuencias portadoras una para uso civil y la otra es para uso militar, estas frecuencias trabajan a 1575.42MHz y 1227.60MHz. Figura 7. Segmentos GPS. Fuente: Vélez Orta, R (s.f), Uso del GPS (Navegador), [imagen], Recuperado de http://velezortarafael.blogspot.com.co/p/investigacion-educativa.html. 2.4. SEÑAL GPS Un satélite GPS está emitiendo una señal continuamente a través de una frecuencia transportadora de microondas, los satélites manejan dos señales: L1 para los civiles con una frecuencia de (1575,42 MHz) y L2 empleada por las fuerzas militares con una frecuencia de1227, 6MHz. La señal GPS permite por medio del reloj atómico proporcionar una hora exacta, donde cada trasmisión esta cronometrada y contiene 1500 bits de tamaño, con una duración de 30 segundos, la transmisión llega al receptor donde es decodificada, luego la señal se divide en dos partes donde la primera nos muestra la relación del receptor y el reloj del satélite, la segunda señal informa el estado de orbita donde se encuentra el satélite [6]. 16.
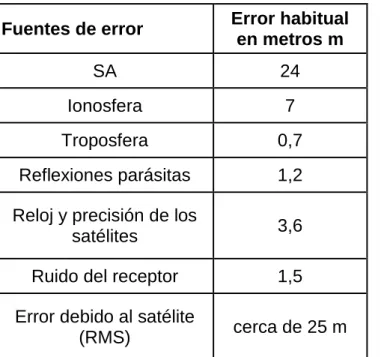
(17) 2.5 MEJORAMIENTO DE LOS SISTEMAS DE POSICIONAMIENTO El sistema GPS ha ido evolucionando con el desarrollo de nuevos sistemas como el GPS (III), más consistente y con mayor disponibilidad; dicho sistema prevé algunas mejoras, como la incorporación de nuevas señales para uso civil L2 y L5 ,a 1227,6 MHz y 176,45 MHz, una mejora en la estructura de la señal, con el aumento de las estaciones de monitoreo terrestres disminuyendo el margen de error en la posición entre (1.5 y 2)m; además permite intercambiar y utilizar información de la frecuencia; una de las ultimas mejoras del GPS es la operación asistida o GPS asistido, el cual almacena la información de los satélites en un servidor externo permitiendo obtener una ubicación más rápida. El sistema IPS-2 es un sistema de posicionamiento inercial y de captura de datos, el cual permite hacer mediciones en tiempo real y en movimiento, hasta en lugares donde la señal del satélite es mala [4]. 2.6 FIABILIDAD DE LOS DATOS Inicialmente el departamento de los Estados Unidos degradaba intencionalmente la posición, agregando un error de 15 a 100m, pero en mayo del año 2000 se deja de operar más en este modo. La precisión del sistema GPS depende de los satélites visibles en órbita, por eso cuando se capta una señal de por lo menos 7 a 9 satélites y el retraso medido de la señal recibida, el margen de error en la localización es más o menos de 2.5m [5]. 2.7 FUENTES DE ERROR Las fuentes de error que afecta a la precisión del GPS pueden ser de origen natural, de origen técnico. La mayoría de las veces estos errores son por atrasos que se presenta en el receptor, cuando este hace la comparación de bits emitidos por el satélite. El error puede ser eliminado usando software [5]. 2.7.1 Factores que Afectan la Calidad de los Datos: - Errores del Satélite. Se refiere a los errores que afectan la calidad de los resultados obtenidos en una medición G.P.S. pueden ser errores orbitales, del reloj y de la configuración geométrica. Los errores orbitales (efemérides) afecta la determinación de la posición del satélite, dicho error se presenta ya que no se tienen las orbitas en la que se encuentra el satélite. - Errores Provenientes del Medio de Propagación. La propagación de la señal 17.
(18) radio a través de la ionosfera y troposfera causa retardos en la señal, por lo tanto genera errores como: Errores de refracción ionosférica. En la frecuencia GPS, el rango del error por refracción en la ionósfera va desde 1m hasta 50m. La frecuencia se ve afectada por la densidad solar y el campo magnético terrestre. Errores de refracción troposférica: los errores en la refracción troposférica se debe a que cuan el receptor ubica un satélite en el zenit este está comprendido entre dos metros mientras que a 5 grados de elevación el error puede ser de 25 metros por lo tanto se generan dos frecuencias diferentes. Multipath: Este error es debido a que el receptor llega una señal por dos o más trayectorias diferentes los cual al haber diferencia en las longitudes causa interferencia en la señal recibida. - Errores en la Recepción. Los errores en la recepción básicamente se dan ya sea por el modo de medición o por el tipo de receptor GPS que se está utilizando. Uno de los errores más comunes en la recepción es el ruido siendo este proporcional a la longitud de onda condiciona la cantidad de datos. En la tabla 1 se puede observar los diferentes errores que se presentan en la recepción. Tabla 1. Valores corrientes de las fuentes de error Fuentes de error. Error habitual en metros m. SA. 24. Ionosfera. 7. Troposfera. 0,7. Reflexiones parásitas. 1,2. Reloj y precisión de los satélites. 3,6. Ruido del receptor. 1,5. Error debido al satélite (RMS). cerca de 25 m. Fuente: Paul Correia, 2000, Tiempo de propagación de la señal emitida por un satélite, imagen tomada de Guía práctica del GPS, traducción al español 2002, Barcelona, p. 26. 18.
(19) 2.8 APLICACIONES ACTUALES DEL GPS A continuación se describen las aplicaciones más comunes de los sistemas GPS. . . Navegación terrestre (y peatonal), marítima y aérea. los automóviles lo incorporan en la actualidad, siendo de especial utilidad para encontrar direcciones o indicar la situación a la grúa. Teléfonos móviles Localización de mascotas. Topografía y geodesia. Construcción (Nivelación de terrenos, cortes de talud, tendido de tuberías, etc). Salvamento y rescate. Deporte, acampada y ocio. Aplicación parecida a la gestión de flotas, en modo abierto para Radioaficionados Para localización de enfermos, discapacitados y menores. Aplicaciones científicas en trabajos de campo. Geocaching, actividad deportiva consistente en buscar "tesoros" escondidos por otros usuarios. Para rastreo y recuperación de vehículos. Navegación deportiva. Deportes aéreos: parapente, ala delta, planeadores, etc. Sistemas de gestión y seguridad de flotas.. 2.9 SISTEMA GPS ASISTIDO (AGPS) Los sistemas de posicionamiento AGPS (assisted global position system) global asistido, "GPS asistido" es un sistema de posicionamiento por satélite. Cuando se enciende un GPS en ocasiones no es capaz de descargar información del satélite, lo que le hace imposible ubicarse, dicho proceso llamado primer posicionamiento puede tardar hasta 5 minutos. El AGPS a diferencia de los GPS guarda la información de los satélites lo que permite que el receptor capte la localización en un instante, se hace mediante el acceso a un servidor haciendo uso de los datos esto cuando se hace en modo on-line, otra manera es una conexión activa a la red celular como lo es la GSM.. 19.
(20) 3. COMPONENTES DEL COLLAR Y SOFTWARE EMPLEADO A continuación se describen los componentes electrónicos, eléctricos y mecánicos más importantes que se emplearon en el desarrollo del collar. Otros componentes como resistencias, sockets de simcard, puertos de comunicación, se especifican en el plano de diseño. 3.1 MÓDULO GPRS M95 El módulo M95 se seleccionó por su cualidad de localización mediante la red GPRS, en contraste con otro modulo como el Sim 900, que solo realiza operaciones GSM y acceso a la red. El m95 ejecuta las operaciones del protocolo para él envió de las coordenadas GPS al servidor por medio de funciones GSM; el M95 además ejecuta la operación de localización por GPRS mediante el QLocator. Es fabricado por Quectel, su tamaño es de 19,9 × 23,6 × 2,65 mm, y es empleado en desarrollos M2M4, además de ser construido para montaje superficial; cuenta con un modo de ahorro de energía, que permite reducir el consumo de energía a 1,3 mA, en estado sleep. El módulo M95 que se observa en la figura 8, presenta la tecnología QuecFOTATM, que permite que el firmware se pueda actualizar de forma remota. “El M95 está integrado con los protocolos de servicios de Internet, como TCP / UDP, FTP y PPP. El módulo cumple con la normativa RoHS5”. Figura 8. Módulo M95. 4. M2M: Desarrollo de intercambio de información de maquina a máquina por envió de datos. RoHS: Es la directiva 2002/95/CE tomada por la Unión europea respecto a restricciones en la implementación de algunas sustancia peligrosas en aparatos eléctricos y electrónicos. 5. 20.
(21) 3.2 MÓDULO GPS L80 El L80 fue elegido como el modulo GPS para el collar, debido a su similitud en comunicación serial con el M95 siendo ambos fabricados por Quectel, además de poseer antena embebida. El L80 permite obtener las coordenadas del collar en formato decimal, además de la velocidad, rumbo, y otras. Es de montaje superficial debido a su reducido tamaño, y cuenta con una antena embebida para reducir el espacio en el uso de sus aplicaciones como se ve en la figura 9, aunque podría trabajar con una antena externa a través de sus pines. El módulo cuenta con un AGPS embebido además de la tecnología AlwaysLocate™6, que permite calcular la órbita y posiciones de los satélites, luego de adquirir datos por tres días. Figura 9. Módulo GPS L80. 3.3 MICROCONTROLADOR ARDUINO Es el microcontrolador que opera los módulos GPRS y GPS de manera autónoma, envía una secuencia de comandos previamente cargados, realizando la operación de control con una frecuencia antes establecida. Se seleccionó la placa arduino Duemilanove la cual se ve en la figura 10, debido a que shield seleccionado es compatible con arduino. Figura 10. Arduino Duemilanove. 6. AlwaysLocate™: es un controlador que evalúa la operación del módulo y regula su operación y consumo.. 21.
(22) La placa Duemilanove cuenta con un microcontrolador, Atmega328, con 14 pines digitales de entrada /salida, seis utilizados para modulación por ancho de pulso (PWM), seis como entradas analógicas, dos para la conexión USB; un conector para la fuente de alimentación y un cristal de cuarzo de 16MHz. 3.4 UNIDAD ELÉCTRICA Durante la etapa de programación, la alimentación de los módulos y del arduino se realizó con un adaptador de corriente AC/DC y con el ordenador respectivamente. Luego para el funcionamiento del collar se seleccionó una batería para suplir la corriente de operación del sistema de manera autónoma. 3.4.1 Batería de prueba Durante las pruebas de manera autónoma, se empleó la bateria de li-ion 18650 de 4000 mAh a 3,7 V que se observa en la figura 11 . Figura 11. Batería Li-ion 18650. 3.4.2 Batería Litio-Ion. La batería de iones de litio, también denominada batería Li-Ion, es un dispositivo diseñado para almacenamiento de energía eléctrica que emplea como electrolito una sal de litio que procura los iones necesarios para la reacción electroquímica reversible que tiene lugar entre el cátodo y el ánodo. La batería cuenta con las siguientes características. Voltaje 3.7V. Amperaje 2000mAh. Dimensiones de la celda (espesor*ancho*longitud)= (5.8*54*60) mm. Se seleccionó este tipo de baterías teniendo en cuenta su forma, la cual se adecua bien a la placa arduino uno y al módulo shield tal como se ve en la figura 12, permitiendo comodidad al ensamblar y facilidad para el diseño del collar.. 22.
(23) Figura 12. Batería litio-ion. 3.5 CARCASA La carcasa del dispositivo fue construida polímero ABS (acrilonitrilo butadieno estireno) prototipada en una impresora 3D. Este tipo de polímero es resistente al impacto y a la intemperie. Cuenta con dos botones, para el encendido del módulo y el reset de la placa arduino, el cual permite reiniciar el funcionamiento del collar, si por algún motivo se cae la comunicación o se bloquea el código. En la figura 13 se puede ver la carcasa construida para el collar. Cuenta con una conexión para la comunicación serial, habilitado para cargar nuevas modificaciones en el programa. En un costado de la carcasa se cuenta con una entrada USB para cargar las baterías. La figura muestra la forma final de la carcasa y la disposición del arduino y el shield. Figura 13. Carcasa collar localizador. 23.
(24) 4. LENGUAJES DE PROGRAMACIÓN Y COMUNICACIÓN APLICADOS EN EL MÓDULO La operación de los módulos GPS y GPRS se realiza desde el ordenador para ensayos y pruebas de manera que el usuario controla todo. Con el microcontrolador se envía todo el procedimiento descrito por comandos, permitiendo que la operación sea autónoma y con una frecuencia programada. 4.1 CÓDIGO DE COMUNICACIÓN DEL MÓDULO M95 Y L80 El módulo M95 y L80 cuenta con una interfaz de comunicación serial la cual es controlada por comandos AT. El comando determina la función del módulo que se quiere ingresar y el parámetro determina el valor para configurar el comando. Los comandos AT inicialmente fueron creados para trabajar con módems, más adelante la telefonía móvil GSM adoptó este lenguaje para la comunicación con sus terminales. Este lenguaje de comunicación con comandos AT son órdenes codificadas que utiliza el usuario al momento de comunicarse con el modem, de esta formas se le permite al usuario usar como interfaz todo un conjunto de comandos AT para configurar y dar instrucciones a los terminales. La comunicación del módulo con el microcontrolador se estableció por medio de los pines TX y RX donde se enviaba un conjunto de códigos AT los cuales cumplían con una secuencia. Para ingresar un comando AT se requiere la siguiente sintaxis: AT+<COMANDO>=<PARAMETRO><CR>< LF> En la tabla 2 se observa algunos ejemplos de comandos básicos del M95 y sus respuestas. Tabla 2. Comandos AT Comando AT+QIDEACT AT+QICSGP=1,\"web.colombiamovil.com.co\ AT+QIDNSIP ATE0 AT+QCELLLOC AT+QIDEACT AT+QIREGAPP. Función Desactiva GPRS Selecciona el GPRS como datos Conecta con la IP o la dirección del dominio Apaga o enciende el eco Posición GSM desactiva el modulo Inicia la comunicación TCPIP y establecer la APN. 24.
(25) Durante el proceso de la programación se realizaron varias pruebas con los comando AT, se verificó la variable tiempo necesaria en cada código para dar una respuesta correcta. 4.2 PROGRAMACIÓN ARDUINO Arduino cuenta con una plataforma de uso libre, que dispone de hardware propio provisto de un mcirocontrolador para su control y enfocado para uso multidisciplinario. “El hardware consiste en una placa con un microcontrolador Atmel AVR y puertos de entrada/salida.4 Los microcontroladores más usados son el Atmega168, Atmega328, Atmega1280, y Atmega8 por su sencillez y bajo coste que permiten el desarrollo de múltiples diseños. Por otro lado el software consiste en un entorno de desarrollo, que implementa el lenguaje de programación Processing/Wiring y el cargador de arranque que es ejecutado en la placa.4 Se programa en el ordenador para que la placa controle los componentes electrónicos.” El micro controlador se encarga del envío y recepción de datos, acordes al protocolo de comandos y tiempos estimados por el fabricante, además de modificar y operar la trama de datos entregada por los módulos. Al construir el programa de control y asignar el protocolo de envió, fue necesario empezar a consultar el manejo de la plataforma con ejemplos básicos e iniciar la sintaxis del programa. El protocolo de envío de los datos al servidor, fue basado en un ejemplo aportado por un desarrollador de Ubidots; solo se modificaron los tiempos de espera al enviar los comandos AT, para obtener mayor estabilidad en la conexión con el servidor. La configuración de conexión serial para lectura y envió de datos, se estableció con tiempos que se probaron en ensayos, y otros que el fabricante recomendó para los códigos de activación de funciones.. 25.
(26) 4.3 ESTRUCTURA DEL PROGRAMA DE ENVIÓ La figura 14 muestra el diagrama de flujo de la estructura del programa de envió. Figura 14. Esquema programa de control. Localizacion y envio de datos. Verificacion de estado. Solicitud de trama GPS. NO. SI GPS esta en operación. Los tiempos de retardo entre comandos son por recomendación del fabricante. Verificaciones de funciones GSM. Activación funciones GPS. Establecer APN. Desactivacion y activacion de funciones. Desfragmentacion de la trama del GPS a variables. Solicitar coordenadas por GPRS. Conversión de las. Modificacion a trama de datos. coordendas a Establecer longitud y latitud. formato decimal. Solicitud de coordendas por GPS. Asignacion de variables. Operación de las coordenadas para asignar de acuerdo a su rumbo. Protocolo de envio a Ubidots. Iniciar conexión IP Describir la estructura del formato de envio. Establecer servidor Confirmar ID del las variables del servidor. Indicar cantidad de caracteres a enviar Inserción de las coordenadas Finalizar conexión IP. 26.
(27) 4.3.1 Descripción del programa A continuación se describe el programa para el control del módulo GPS y GPRS desde el microcontrolador. -. Inicialización serial del módulo. Void setup: es la primera función que lee el programa, allí inicializa y se configura la comunicación serial.. Void loop: la función se ejecuta cíclicamente, lo que permite que el programa responda a las instrucciones o comandos que se le ordena cada determinado tiempo.. -. Void creados en el programa. Void initString: se le asigna un tamaño a la cadena por medio del carácter y se establece una condición para el tamaño de la frase, esta es la que se guarda para llamarla posteriormente. 27.
(28) Void getlonlat: se llama la “frase” y se le asigna tamaño a cada variable, luego se extrae de la “frase” el estado del satélite, la posición y la latitud.. Void ShowSerialdata: solicita las variables de latitud, longitud y el estado del satélite es comparado con dos caracteres definidas; si es “A”, el programa envía los datos del GPS, si la respuesta muestra “V”, el programa realiza el procedimiento por GPRS.. 28.
(29) Void funcionmagica. Configura los datos para envío de coordenadas por GPS.. Void showgps. lee los datos del puerto serial.. 29.
(30) Void initGPRS (char*NUMERO_MAJICO). Asigna el tamaño a la cadena por medio del carácter y se establece una condición para dar tamaño a “frase”7 .. Void readGeoPosition. Fracciona la trama del GPS y extrae la longitud y latitud, con base a los caracteres ASCII 58(:) y ASCII 39(,).. 7. Frase: respuesta del GPRS.. 30.
(31) Void sendGSM. Configura los datos para envío de coordenadas por GPRS.. Para enviar de datos de posición a la plataforma de UBIDOTS, se debe cumplir con un protocolo ya definido, que incluye el ID del usuario, asignado por la plataforma en la creación del usuario y sus variables; definición del tamaño de caracteres para enviar, tipo de datos (coordenada, texto) y la iniciación de una solicitud JSON (javascript object notation) como se ve a continuación.. 31.
(32) 5. EVALUACIÓN DE LOS SISTEMAS DE LOCALIZACIÓN GPS Y GPRS IMPLEMENTADOS EN EL MÓDULO. 5.1 PRUEBAS DEL MÓDULO M95 La función del collar es enviar las coordenadas de su ubicación para la visualización en un mapa satelital, por lo que al iniciar las pruebas de localización solo se trabajó con el módulo M95. El módulo se manejó a través de una tarjeta para protoboard como se muestra en la figura 15, para la comunicación se empleó un conversor RS232. Figura 15. Placa para protoboard M95. La tarjeta posee un alojamiento para simcard permitiendo al módulo establecer la conexión a la red de telefonía móvil. Mediante la aplicación QNavigator de Quectel se visualizaron las respuestas a los códigos enviados. Se verificaron algunos códigos de funcionalidad GSM, como el nombre del operador, red, mensajería y llamadas. Luego de conocer los aspectos básicos del M95, se avanzó a la etapa de localización, en la que mediante una opción en el menú de la aplicación Navidator, registraba las coordenadas de posición con la secuencia de códigos indicada. La figura 16 muestra la prueba realizada, la cual indica en el mapa de Google Maps la coordenada obtenida, junto con el protocolo de comandos enviados y sus respuestas. 32.
(33) Figura 16. Localización automática desde la aplicación del QNavigator. 5.2 MONTAJE ELÉCTRICO PARA COMUNICACIÓN Y PROGRAMACIÓN POR PUERTO SERIAL Conocido el funcionamiento del M95, se efectuó el montaje eléctrico para realizar pruebas de conexión al microcontrolador arduino, verificando cada respuesta del M95. Teniendo en cuanta el código ‘AT’ básico del M95, se elaboró un programa que permitiera enviar este comando por el puerto serial con una frecuencia de 10 segundos. La conexión entre la tarjeta M95 y el arduino fue basada en un esquema suministrado por el proveedor del módulo como se ve en la figura 17. Este esquema permite realizar la conexión básica de los pines de lectura y envió de datos (RX y TX), además de la alimentación. El rango de voltaje de funcionamiento del M95 se encuentra entre 3,7 y 4 v, mientras que la salida de tensión desde el microcontrolador es de 5V; esta diferencia hace necesaria la 33.
(34) disminución de tensión al momento en que el arduino envía un dato y un aumento cuando el M95 responde, la figura 17 muestra el circuito de conexión. Figura 17. Conexión eléctrica entre el arduino y el GPRS. Fuente: SIGMA Electrónica, (2014), Control electrónico mediante GSM con M95 de Quectel, [Video] Disponible en: https://www.youtube.com/watch?v=a34MwVuR3I 5.3 DESARROLLO DE LA PROGRAMACIÓN E INTEGRACIÓN PARA EL SHIELD M95 Luego de la etapa de identificación y manejo del módulo M95, se comenzó a emplear la tarjeta Shield GSM/GPRS M95 que se observa en la figura 18, para desarrollar un programa de control que permitiera automatizar la solicitud de la posición. Esta tarjeta cuenta con un puerto de sim igual a la placa predecesora además de un sistema de alimentación externa, y un puerto para conexión por serial con el ordenador. Figura 18. Shield GSM/GPRS M95 para Arduino. 34.
(35) La tarjeta posee un puerto de alimentación externo, lo que permite trabajarla directamente con el computador, sin la necesidad de emplear un arduino como interfaz entre ambos. En las pruebas con el shield para arduino, la aplicación Qnavigator se empleó para verificar comandos y solicitar posición. Esta placa alterna el funcionamiento entre puerto serial y la conexión desde un arduino. Luego de verificar los procedimientos normales con el M95, se procedió a trabajar la placa sobre un arduino Leonardo para ser programado y analizar el comportamiento y las respuestas del módulo. De igual manera que con la placa anterior el primer programa que se desarrolló para comunicar el modulo con el microcontrolador, fue enviar el comando AT cada tres segundos. La base del programa fue tomada de un programa ejemplo que tiene la empresa Sigma electrónica, el cual realiza una llamada automática además de encender de manera autónoma el modulo en caso de encontrarse apagado. El programa implementado conservo el encendido automático pero antes de realizar la llamada, se solicitó el código AT. Algunos comandos como los de operador activo, información del módulo, IP actual, entre otros se agregaron al protocolo que se empezó a definir. AT+QCELLLOC es el comando del M95 que permite pedir la posición, esté viene definido en el firmware del módulo a partir de la actualización 21; debido a que la placa adquirida no tenía esta actualización, en el momento de enviar el código la solicitud fue invalidada pues el comando no fue reconocido. La actualización de firmware se realizó por el programa QFlash provisto directamente por el fabricante del módulo. Tal y como se observa en la figura 19. Figura 19. Programa QFlash. 35.
(36) Los resultados luego de la actualización del firmware fueron satisfactorios al poder reconocer el código de posicionamiento, de esta manera se continuo con el proceso para establecer el protocolo de envió. Durante esta etapa se pudo evidenciar que la trama de datos del módulo al entregar las coordenadas, solo se guardaban como una variable, lo que produjo que al ser enviadas se necesitara fragmentar la respuesta para enviar la longitud y la latitud por separado. 5.4 PRUEBAS Y RESULTADOS DE LA LOCALIZACIÓN POR MEDIO DEL GPRS Los primeros envíos a Ubidots se realizaron por localización con GPRS empleando la tarjeta Shield GSM/GPRS M95, estos se pueden observar en la figura 20. Figura 20. Datos enviados a UBIDOTS por localización por GPRS. 36.
(37) Luego de tener los datos en el servidor se empleó la aplicación de Google Maps para verificar la proximidad de las coordenadas dadas. Con los primeros datos se identificó que el error aproximado era de 120 m a 140 m como se observa en la imagen. La posición con menor error obtenida por localización con GPRS, preciso de una distancia de 40 m retirada a la posición real. 5.5 PRUEBAS Y RESULTADOS DE LA LOCALIZACIÓN POR MEDIO DEL GPS Luego de haber determinado la capacidad de posicionamiento del GPRS M95, se pasó a realizar pruebas con el GPS L80, del mismo fabricante. La empresa didácticas electrónicas desarrollo un shield para arduino, que permite trabajar con un módulo GPRS/GSM junto con un el GPS L80 como se observa en la figura 21; de esta manera se puede integrar la función del GPRS con el de la localización satelital. Figura 21. Shield GPRS/GSM M95 GPS L80. En las pruebas realizadas con el shield se identificó que el módulo L80 se enciende y comienza su funcionamiento luego de tiempos variables, que dependen del tiempo que tarda el M95 en realizar el protocolo de conexión satelital, además de las condiciones ambientales; en algunos casos este retardo fue de unos pocos minutos y en otros puede incluso tardar media hora. Para el control de este shield, se dispone de un jumper que de manera manual conmuta la conexión al ordenador o al arduino; y debido a que no cuenta con una fuente de alimentación ni un puerto para conexión serial, se hace indispensable que la placa este acoplada al arduino. 37.
(38) La funcionalidad GSM de este shield se verificó con el mismo procedimiento realizado a las placas anteriores, además de iniciarse el ensayo con los comandos básicos del GPS. En las pruebas se empleó el programa Dockligh que comunica el módulo directo al ordenador, empleando el arduino únicamente como interfaz entre ambos. La rutina que inicialmente se empleó se ve en la figura 22. Figura 22. Secuencia de comandos para verificación GSM. Este procedimiento comprueba el estado del módulo, su información básica y desactiva la función eco8, mientras con el código AT+CFUN=1 se activan todas la funciones GSM y GPRS. Luego se establece el modo texto para poder enviar un mensaje, además de realizar una llamada de prueba. En la figura 23 se muestra la rutina que emplea el GPS para obtener una ubicación y enviarla a un servidor. De esta rutina solo se emplearon los códigos de comprobación GPRS y el código AT+QGPSCFG=”GPSINIT”,1 que inicializa la comunicación con el L80, necesario para enviar el código AT+QGPSRD=”NMEA/RMC”, que solicita la trama de posicionamiento.. 8. Función Eco: esta función permite visualizar el comando que se ha enviado al módulo.. 38.
(39) Figura 23. Secuencia de Comandos para verificación de funciones del GPS. Después de haber probado el shield directamente desde el ordenador, la placa se conectó al arduino, para iniciar ensayos y estimar el retardo en obtener la posición. También se observó la variación en las coordenadas del GPS durante los primeros minutos de operación, tal como se ve en la figura 24, hasta alcanzar un rango estable con variaciones de entre uno y dos metros aproximadamente. La programación debió modificarse para incluir el tratamiento a la nueva trama de datos que el shield entregaba. Figura 24. Progreso de las coordenadas GPS durante los primeros minutos de funcionamiento. 39.
(40) La trama de datos que el shield responde al pedir localización, presenta la siguiente estructura. - Código AT: “AT+ QGPSRD=”NMEA/RMC” ” - Trama de datos enviada por el GPS: “$GPRMC,195726.000,A,3324.9257,S,07036.3802,W,1.08,183.58,151210,,*0E” Esta trama se segmento por comas, permitiendo dar posición a cada dato diferente, de manera que con solo mencionarlo puede emplearse en el protocolo. La sintaxis de este mensaje es la siguiente: La palabra GPRMC significa que la frase debe interpretarse como el mensaje mínimo recomendado. El segundo valor indica la hora del GPS con formato HHMMSS.XXX, siendo el HH las horas, el MM los minutos, el SS lo segundos y el xxx los milisegundos. El tercero es un carácter que muestra el estado del módulo con respecto a los satélites, la A indica que la conexión se ha iniciado, mientras que la V indica que al no haber conexión, aun no se puede establecer la posición. El cuarto valor está indicando la coordenada de la latitud en grados decimales, siendo esta la distancia desde ese punto al norte o al sur del ecuador. El formato en que se envía este valor es HHMM.M, donde las HH van a indicar los grados decimales mientras la parte MM.M muestran los minutos. Este valor es sucedido por los caracteres N o S, que indican a qué lado del ecuador se encuentra la posición. El sexto valor está indicando la coordenada de la longitud, siendo esta la distancia que hay de la posición indicada al Este u Oeste del meridiano de Greenwich. El formato utilizado para esta coordenada es igual al de la latitud, sin embargo las letras que indican el sentido son la E u W. El siguiente valor indica en Nudos la velocidad a la cual se mueve el dispositivo. Los últimos valores corresponden al rumbo del GPS dado en azimut 9, la fecha UTC10 sincronizada con el tiempo de los relojes en los satélites, y finalmente se encuentra la suma de comprobación, que se utiliza para identificar los errores en los datos que se hayan producido durante la transmisión.. 9. Azimut: es un ángulo medido en grados entre 0 y 360, donde 0 representa la dirección Norte 90 representa Este, 180 hace referencia a Sur 270 al Oeste. 10. UTC: del inglés Coordinated Universal Time, es el estándar más manejado en el mundo para la regulación del tiempo a nivel mundial.. 40.
(41) Luego de enviar los primeros datos al servidor, se empleó la posición obtenida desde un dispositivo móvil como referencia para contrastar los datos del GPS. De esta manera se identificó una drástica reducción en el error, comparado con el presente en el GPRS, siendo este de tan solo un metro o menos, tal como se ve en la figura 25. Figura 25. Comparación de las coordenadas GPS y GPRS con respecto a la posición real. Habiendo estabilizado el comportamiento y respuestas del shield al trabajar con el arduino, se iniciaron ensayos con el modulo trabajando autónomamente, alimentado por baterías. Se identificó que al ser encendido, las primeras posiciones obtenidas fueron mediante GPRS, debido al tiempo que se toma el GPS en completar su protocolo interno. 41.
(42) 5.6 COMPARACIÓN DEL SHIELD GPRS/GSM Y GPS La tabla 3 muestra las coordenadas de posición empleando los Shield GPRS/GSM y GPS, con respecto a la posición real conocida. Tabla 3. Comparación de posicionamiento por diferentes sistemas Posición real. Coordenada por GPS. Error aprox.. Coordenada por GPS. Error aprox.. Latitud. Metros lineales. Latitud. Longitud. Metros lineales. Latitud. Longitud. Longitud. 4.833093. -75.681091. 4.833093 -75.681096. 1. 4.835221. -75.677942. 400. 4.837296. -75.679691. 4.837296 -75.679885. 20. 4.833716. -75.677077. 350. 4.795266. -75.688609. 4.795290 -75.688563. 5. 4.794445. -75.686707. 100. 4.837960. -75.679413. 4.837881 -75.679448. 3. 4.840661. -75.679920. 250. De acuerdo a la mayor precisión en las coordenadas y en la mayor rapidez al actualizar los datos, se definió el GPS como el localizador a implementar en el collar. Debido a que las coordenadas deben ser enviadas al servidor, el módulo GPRS se ha dejado en el collar para realizar esta operación. 5.6.1 Pruebas Para analizar la estabilidad del shield durante varias horas y en movimiento, se realizaron algunas pruebas. El 7 de septiembre se realizó un recorrido, iniciando en el barrio Santa Isabel de la ciudad de Dosquebradas, luego cruzando por el barrio Guadalupe, hasta llegar al barrio Buenos Aires. El regreso se realizó desde el último punto hasta el lugar de salida. La primera localización hecha por el GPRS se ve en la figura 26. Figura 26. Coordenada1: lat: 4.838062, lng: -75.67565.. 42.
(43) Luego de que el GPS se encendiera, la tercera posición obtenida por este se puede ver en la figura 27. Figura 27. Coordenada2: 4.837386, -75.677134. Las siguientes son las posiciones obtenidas a lo largo del trayecto, el tiempo entre ellas es de entre 136 y 140 segundos. lat:4.837990, lng:-75.675788 lat:4.837018, lng:-75.674552 lat:4.837097, lng:-75.673248 lat:4.836693, lng:-75.672119 lat:4.837618, lng:-75.670890 lat:4.838358, lng:-75.669982 lat:4.838871, lng:-75.671127 lat:4.839055, lng:-75.672050 lat:4.838528, lng:-75.673210 lat:4.837803, lng:-75.674369. lat:4.837212, lng:-75.676780 lat:4.837762, lng:-75.675621 lat:4.837212, lng:-75.676780 lat:4.838187, lng:-75.678688 lat:4.838195, lng:-75.678680 lat:4.838290, lng:-75.678619 lat:4.838263, lng:-75.678634 lat:4.838263, lng:-75.678665 lat:4.838230, lng:-75.678672.. En la figura 28 se muestra el mapa con el recorrido realizado, los globos indican la posición inicial y final.. 43.
(44) Figura 28. Recorrido de la prueba de localización 7 de Septiembre. 44.
(45) 6. DISEÑO DE LA TARJETA DE LOCALIZACIÓN. Durante los ensayos y pruebas de localización para el envió de datos, se emplearon dispositivos comerciales como los shields desarrollados por didácticas electrónicas y el microcontrolador arduino. En la etapa final se utilizó toda la información obtenida en las pruebas y ensayos electrónicos, para determinar que componentes eran estrictamente necesarios, para el correcto funcionamiento del collar, y de esta manera diseñar una tarjeta propia. Los módulos GPRS/GSM M95 y GPS L80, son los elementos alrededor de los cuales se diseñó la tarjeta, siguiendo las recomendaciones del fabricante en torno las distancias entre componentes y módulos, esquemas de conexiones junto con sus componentes específicos y valores recomendados. La tarjeta posee una entrada de voltaje para ambos módulos; empleando las resistencias recomendadas se reguló el voltaje para cada pin. La automatización de esta tarjeta se realiza por medio del microcontrolador Atmega328P-AU, este es similar al que emplea el arduino Duemilanove, solo que este es de montaje superficial. También se incluyeron en la tarjeta una antena GPRS embebida y un socket para simcard. El microcontrolador permitió reducir el tamaño del collar al prescindir del arduino; el Atmega328P-AU necesito un cristal de cuarzo para la regulación del tiempo. En la figura 29 se muestran las conexiones que se hicieron desde el microcontrolador. Los pines de alimentación fueron (VCC,GND,AVCC,AGND),los pines del cristal del cuarzo de 16 MHz fueron (XTAL1,XTAL2), la comunicación serial se realizó con los pines(RX,TX) y el pin de asistencia con el RESET; entre los pines VCC y GND se colocó un condensador a modo de filtro en la tensión de alimentación. Figura 29. Conexiones Microcontrolador ATmega 328. El módulo M95 GPRS-GSM cuenta con 42 pines, los cuales operan en diferentes funciones como la alimentación de voltaje, comunicación UART, conexión de la SIM, audio y antena. Para la localización y envió de coordenadas no es necesario emplear los pines de audio, por lo que estos se dejaron abiertos. Los pines empleados fueron los de comunicación serial ( TX ,RX), los pines de la simcard 45.
(46) (SIM_GND,SIM_CLK,SIM_DATA,SIM_RST,SIM_VDD), los pines de la antena(RF_ANTENNA,GND), los pines de alimentación(VBAT,VDD_EXT,V_RTC); el pin del POWER_KEY el cual sirve para el encendido del módulo, el apagado de emergencia (EMERG_OFF) y los pines de STATUS (ESTADO) y NET_LIGHT, los cuales cuentan con un led que indica el funcionamiento del módulo y estado de la red. Sin la conexión de todos los pines, se redujo el tamaño de la tarjeta al no implementar las resistencias y condensadores respectivos. La figura 30 muestra el esquema completo de las conexiones de todos los elementos incluidos en la tarjeta, mientras la figura 31 y figura 32 muestran una ampliación del esquema. Figura 30. Esquema de conexiones eléctricas de la tarjeta diseñada. 46.
(47) Figura 31. Imagen ampliada del lado izquierdo del esquema de conexiones.. 47.
(48) Figura 32. Imagen ampliada del lado derecho del esquema de conexiones.. 48.
(49) El diseño final de la tarjeta es una placa de 5 cm de ancho por 6 cm de largo, la figura 33 muestra el esquema de la tarjeta en escala 1:3, con la integración de todos los componentes y respectivas conexiones. Figura 33. Circuito eléctrico de la tarjeta. El rango de alimentación de la tarjeta es de 3.3 a 4.6 v, para asegurar que la entrada de tensión no caiga se utilizaron algunos condensadores cerca al pin VBAT. La disposición de los elementos se observa en la figura 34.. 49.
(50) Figura 34. Configuración eléctrica del circuito de alimentación. Para el encendido y apagado de emergencia (pines power_key y emer_off) se usaron dos resistencias y un transistor NPN, el esquema de esta conexión se ve en la figura 35. Figura 35. Circuito eléctrico para el switch de encendido. Fuente: Quectel, (2015), GNSS Family. GPS L80, Quectel L80 Hardware Design V1.3. Recuperado el 13 de septiembre de 2015, de http://www.quectel.com/UploadImage/Downlad/Quectel_L80_Hardware_Design_V 1.3.pdf. 50.
(51) Las conexiones recomendadas para el modulo GPS L80 por el fabricante, se muestran en la figura 36. Figura 36. Conexiones necesarias del módulo GPS L80. 51.
(52) CONCLUSIONES Se estudió y contextualizo bibliográficamente el funcionamiento de los dispositivos GPS, y su implementación en elementos de uso cotidiano. Se identificó la afectación directa de las condiciones climáticas de inverno y operación nocturna, sobre la estabilidad del GPS durante el encendido, retrasando el protocolo de comunicación satelital. Con las pruebas realizadas se estimó un error mínimo de 40 m en las coordenadas obtenidas mediante el GPRS. Se pudo evidenciar la diferencia de precisión en la localización por GPRS dependiendo del operador móvil empleado, con un valor promedio de 40 m usando CLARO11 y entre 100 y 90 m con TIGO. En funcionamiento autónomo el collar alcanzó una operación continua de alrededor de veinte horas, enviando las coordenadas de manera satisfactoria. La máxima capacidad de operación estable del collar se estableció en cincuenta y un segundos, y el tiempo para funcionamiento normal en 130 segundos. El programa de control, incluyó parámetros y protocolos del fabricante de los módulos y del servidor empleado. La trama de datos del GPS se modificó e interpretaron mediante desfragmentación de los datos recibidos. La tarjeta diseñada para el collar cuenta con un microcontrolador Atmega 328P-AU, una antena GPRS embebida y una batería de Litio-ion de 3.7 v. Sus dimensiones finales fueron de 6 x 5 cm. El montaje del Shield GPS/GPRS en la placa Duemilanove eliminó el ruido que se presenta con un montaje sobre el arduino Leonardo. Se diseñó una tarjeta localizadora, implementando la tecnología GPRS y GPS, para el posicionamiento de mascotas.. 11. Claro, Tigo: Operadores de telefonía celular en Colombia.. 52.
(53) BIBLIOGRAFIA [1]. Nilsson, Jeff. Saturday evening post. The first GPS: High-Tech Navigation in 1909. [En línea] 4 de Febrero de 2012. http://www.saturdayeveningpost.com/2012/02/04/history/post-perspective/gps1909.html. [2]. ETTEN, J. P. VAN. Colegio oficial Ingenieros de Telecomunicación. El sistema Loran C y su desarrollo. [En línea] [Citado el: 6 de Octubre de 2015.] http://www.coit.es/foro/pub/ficheros/loran_c1970_c375ac47.pdf. [3]. Elizabeth, Howell. Space. Navstar: GPS Satellite Network. [En línea] 14 de Febrero de 2013. [Citado el: 6 de Octubre de 2015.] http://www.space.com/19794navstar.html. [4]. Rey, Jorge R. Universidad de Florida,Departamento de Entomología and Nematología. El Sistema de Posicionamiento Global-GPS. [En línea] [Citado el: 6 de Octubre de 2015.] https://edis.ifas.ufl.edu/pdffiles/IN/IN65700.pdf. [5]. Correi, Paul. Guia práctica del GPS. Barcelona : s.n., 2002. [6]. El-Rabbany, Ahmed. Introduction to GPS: The Global Positioning System. Introduction to GPS. Norwood, MA : Artech House, 2002. [7]. Lawrence Letham, Traducción Ricard Rodríguez,. GPS Fácil. Barcelona : Paidotribo, 2001. [8]. Manuel Berrocoso, María Eva Ramírez, Alejandro Pérez-Peña, José Manuel Enríquez-Salamanca, Alberto Fernández, Cristina Torrecillas. Laboratorio de Astronomía y Geodesia. Departamento de Matemáticas. Facultad de Ciencias. Universidad de Cádiz. El sistema de posicionamiento global. [En línea] [Citado el: 13 de Octubre de 2015.] http://vulcanologia.geofisica.unam.mx/files/curso_gps/GPS.pdf [9]. Gunnar Heine, Holger Sagkob. Gprs: Gateway to Third Generation Mobile Networks. Boston : Artech House, 2003. [10]. Boquera, María Carmen España. Servicios avanzados de telecomunicación. Madrid : Díaz de Santos, 2003. [11]. Bates, Regis "Bud". GPRS: GENERAL PACKET RADIO SERVICE. Nueva York : The McGraw-Hill companies, 2002.. 53.
(54)
Figure

+7



Documento similar
A partir de los resultados de este análisis en los que la entrevistadora es la protagonista frente a los entrevistados, la información política veraz, que se supone que
[r]
SECUNDARIA COMPRENDE LOS
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
diabetes, chronic respiratory disease and cancer) targeted in the Global Action Plan on NCDs as well as other noncommunicable conditions of particular concern in the European
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
[r]
El operador del sistema es Red Eléctrica de España y como tal ha de garantizar el equilibrio entre la producción y el consumo de energía, asegurando la calidad del suministro
