Automatización de casas a través de dispositivos móviles
61
0
0
Texto completo
(2) Índice de contenidos. Índice de contenidos.. --------------------------- 4. Capítulo Primero ____________________________ 6 1.1 Introducción _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 7 1.2 Justificación _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 8 1.3 Planteamiento _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 9 1.4 Estado del arte. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 9 1.4.1 Larestel. 9. 1.4.2 Secant. 10. 1.5 Objetivo del proyecto _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 11 1.6 Objetivos específicos _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 11 1.7 Metas _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 12 1.8 Descripción del proyecto. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 12. Capítulo Segundo _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 14 Marco Teórico. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 15 2.1 Plataforma Apple. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 15 2.1.1 Herramientas de desarrollo Apple. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 16 2.1.2 Fundamentos del lenguaje de desarrollo: "Objective C" _ _ _ _ _ _ _ _ _ _ _ _ 16 2.1.3 Manejo de Memoria _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 17 2.1.3.1 Creación de objetos _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 18 2.1.3.2 Manejo de Memoria y Destrucción de Objetos _ _ _ _ _ _ _ _ _ _ _ _ _ _ 18 2.3 Wi-Fi _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 19 2.4 Microcontroladores _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 21 2.5 Comunicaciones Serial (USART TTL) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 21 2.5.1 Tipos de Comunicaciones Seriales:. 21. 2.5.2 Margen de ruido.. 23. 2.5.3 Ventajas y desventajas de la comunicación en serie.. 23. 2.5.4 Comunicación RS-485. 24. Capítulo Tercero. ---------------------------- 27. Desarrollo _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 28. 4.
(3) 3.1 Aplicación móvil _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 28 3.1.1 Bases de datos.. 28. 3.1.2 Conexión Wi-Fi. 29. 3.1.3 Vistas de usuario.. 30. 3.1.4 Vista de Actuadores. 31. 3.1.5 Vistas de Configuración de Usuario.. 31. 3.1.6 Vista de Configuraciones de Administrador. 32. 3.1.7 Vista de Soporte Técnico. 33. 3.2 Módulos inalámbricos _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 34 3.2.1 Sistema de Red local. 34. 3.2.2 Infraestructura inalámbrica.. 38. 3.3 Configuración y comunicación RS-485 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 39 3.3.1 Configuración módulo maestro _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 40 3.3.2 Configuración esclavo. 45. 3.3.3 Forma de comunicación. 46. 3.4 Actuador de Luz ON/OFF _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 47. 3.5 Actuador de chapa eléctrica. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 48 3.6 Actuador Ventilador de 4 Estados. _________________ 50 3. 7 Actuador de persiana automática _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 54. Capítulo Cuarto _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 56 Resultados _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 57 4.1 Tabla Comparativa _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 57 4.2 Aspecto Económico _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 59 4.3 Costos Unitarios _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 60 4.3.1. Módulo Maestro _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 60 4.3.2. Módulo Esclavo _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 60 4.3.2.1 Persiana _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 60 4.3.2.2 Chapa Eléctrica _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 61 4.3.2.3 Luz _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 61 4.3.2.3 Ventilador_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 61 Planes a futuro. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 62 Conclusiones _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 62. Bibliografía _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 63. 5.
(4) 6.
(5) 1.1 Introducción. En los últimos años, la tecnología ha estado en un inevitable crecimiento, lo cual hoy en día, la ha convertido en uno de los factores que rigen algunas de las sociedades actuales. A diario se puede observar como la telefonía, las tecnologías de la información, junto con la informática y muchos otros desarrollos tecnológicos forman parte de la vida de las personas comunes, pues no sólo se ha vuelto una herramienta muy útil, sino también una necesidad que día con día provoca que el mercado se expanda y sea tanto accesible al desarrollo, como exigente al producto. Dicho lo anterior, podemos poner este incremento tecnológico como justificación para el desarrollo de este proyecto, ya que uno de los puntos de partida de la tecnología, es justamente facilitar algunas de las tareas que el realiza el hombre en su vida cotidiana. Es importante también mencionar que en los últimos años, el desarrollo tanto de dispositivos móviles, como de sistemas operativos para los mismos ha tenido un crecimiento importante, ya que estos se han venido incorporando a la vida cotidiana, y a la estructura económica y social. En un principio, la telefonía móvil y sus tecnologías creció por sí sola, únicamente como medio de telecomunicaciones, teniendo en ella un medio mucho más eficaz y personal en comparación con la telefonía local; a su vez, el intemet emergió como herramienta esencial en muchos ámbitos como el educativo, el social, informativo, etc. Sin embargo, tal cual pasó con la telefonía local, los usos y aplicaciones del intemet han sido llamados a volverse móviles, hacienda uso de herramientas que soporten tanto la conectividad eficaz, como los requerimientos de hardware y software para la interacción con el usuario. Es por esto que los dispositivos móviles han venido integrando distintas funciones, dejando atrás la exclusividad de funciones como llamadas y mensajes instantáneos; ahora han pasado de ser teléfonos móviles comunes, para convertirse en "smartphones" con procesadores poderosos y funciones complejos. A pesar de que en México no todos los niveles sociales tienen acceso a estos grandes dispositivos, es innegable que la tendencia apunta a la disponibilidad para núcleos más grandes de la sociedad. Como ha venido sucediendo en otros países, en México el crecimiento del consumo en este tipo de aparatos electrónicos, como el desarrollo de aplicaciones para los mismos, tiene una pendiente cuesta arriba; sin embargo, el mercado se ha expandido y las empresas que desarrollan estas tecnologías han entrado en una fuerte competencia por obtener la preferencia de los usuarios finales. 7.
(6) 1.2 Justificación. No es suficiente con decir que la tecnología está empezando a formar parte de la vida cotidiana de las personas, pues muchas veces ésta no se hace pensando en todos los grupos sociales que la podrían utilizar. Y es que existen también otros aspectos, como lo social o lo económico, que son factores importantes para aquellos en que la tecnología también tendría que servir como herramienta y es muchas veces desatendida. Existe un sector de la población para el cual es dificil o poco usual que se desarrolle tecnología dirigida. En nuestro país, personas que tienen alguna discapacidad motriz suelen encontrar dificultades para llevar una vida normal o encontrar herramientas tecnológicas que pueda facilitarle algunas tareas. Y aunque es posible que puedan encontrar solución a algunos obstáculos a través de la tecnología, existe un segundo factor que los aleja de poder sobrellevar sus actividades de una manera más sencilla. Es que a pesar de formar· parte de la era de las Tecnologías de información, actualmente los sistemas tecnológicos sobrepasan la media económica de nuestro país. Específicamente en el área de demótica, los sistemas suelen ser muy caros, dando como resultado que un porcentaje muy bajo de la población los pueda adquirir. Sin embargo, debido a la disminución en el precio de la tecnología es viable hacer proyectos de demótica cada vez más baratos y con mayores alcances, por lo cual se puede ver que este es un buen momento de iniciar un proyecto de este tipo, añadido al poco desarrollo en esta área, también a que no se encuentran muchas empresas que la desarrolle y la demanda en el campo de la demótica va a ser cada vez mayor. El desarrollo en casas y edificios inteligentes es una práctica que va creciendo por lo que es necesario lograr diseño optimo que logre maximizar la funcionalidad y eficiencia mayor para todos los inquilinos, haciendo un sistema flexible que permita cambios para lograr tener el sistema actualizado, logrando con esto un ambiente de máxima satisfacción y bienestar. Por esto los principales objetivos de una casa inteligente son: a) b) c) d) e) t). Satisfacer las necesidades presentes y futuras de los ocupantes. La flexibilidad, tanto en la estructura como en los sistemas y servicios. La funcionalidad de la casa. La modalidad de la estructura e instalaciones de la casa. Mayor confort para el usuario. El incremento de la seguridad.. 8.
(7) 1.3 Planteamiento. Este proyecto surge como una solución a los requerimientos actuales de servicios personales, tanto para ayudar a todo tipo de personas y facilitar las actividades diarias. Específicamente, se trata de desarrollar un sistema que logre la automatización de una casa, en lo que se conoce como domótica, es decir una casa automática o inteligente, que funciona por sí sola. Se busca ofrecer un control total sobre las necesidades básicas del hogar, que pretende ayudar a la gente a sentirse en un ambiente con máximo confort, enfocado en poner a su alcance una administración completa, en una sola herramienta, La primera necesidad a cubrir, la más elemental, es la iluminación del recinto, dándole la capacidad de controlar toda luz eléctrica en la casa, sin necesidad de encontrarse en la habitación, además de que le permitirá conocer el estado de luces en todo el lugar. Una segunda área de oportunidad son las ventanas y cortinas, ya que durante el día el control sobre estas también incide directamente sobre la iluminación además de la ventilación del hogar. Por último, también pretendemos dar un control sobre las puertas para ofrecer un servicio de portero electrónico desde el mismo control. Otro control importante, y que está en la mente de las personas, es el de los servicios de agua y gas, tanto por su distribución y manejo, como también para la seguridad de la casa. De esta manera se resume el tipo de servicio que buscamos ofrecer, un servicio muy completo que sea accesible para cualquier tipo de usuarios, no importando su nivel de adopción a este tipo de tecnología, ya que le ofreceremos una interfaz sencilla y fácil de manipular. Además, también buscaremos que el desarrollo de esta tecnología no requiera de una inversión grande para poner este servicio al alcance de una gran cantidad de usuarios de distintos niveles económicos y no sólo para las personas de alto nivel económico como hoy en día.. 1.4 Estado del arte.. Actualmente en el mercado existen diferentes sistemas para control de casas, automatizándolas en funciones ya predeterminadas y control de tareas mediante aparatos en contacto fisicamente con el usuario.. 1.4.1 Larestel. 9.
(8) Esta es una empresa española dedicada a la domótica y a la inmótica, siendo su objetivo "hacer la vida mucho más fácil, confortable y segura". Entre las cosas que ofrecen se encuentra el "Control de la vivienda", la cual permite visualizar y actuar sobre el estado de una de manera remota o en la casa vía computadora a través de Internet, o celular. Ejemplos de estos son manejo de electrodomésticos, climatización, subir o bajar las persianas, etc. Entre sus clientes están constructoras, arquitectos, promotoras y particulares, le ofrecen seguimiento es todas las fases del proyecto y garantías. Les brindan soporte técnico y mantenimiento de las instalaciones, además de que los proyectos son totalmente personalizables exclusivos a las necesidades requeridas. En su carta de ofertas tiene opciones de control, a pedidos personalizados con los siguientes aspectos.. • • •. Iluminación. •. Toldos y persianas. • Life Styles • Audio Distribuido • Riego inteligente. Control de la vivienda. • Simulación de presencia. Climatización. También ofrece servicios adicionales en conjunto con otras compañías tales como:. •. •. Sistemas de seguridad y video vigilancia. • •. Video portero con central telefónica. • Aspiración Centralizada. Home cinema HD Electrodomésticos inteligentes. •. Control de accesos En su página de internet no manejan los precios que tienen para sus productos, debido a que las cotizaciones dependen de lo que el cliente final desee.l 1l. 1.4.2 Secant. SECANT tiene su sede mundial en Montreal Canadá y tiene filiales en París y ahora en Santiago de Chile, en nuestro país se llama SECANT SUDAMERICA Ltda y su producto principal es CARDI0l 21 · CARDIO es un sistema basado en domótica y centralizado para la automatización residencial. El sistema de automatización del hogar CARDIO, permite un mejor manejo de las funciones básicas del hogar tales como control de la calefacción y aire acondicionado, seguridad, iluminación y aparatos eléctricos varios.. 10.
(9) Entre sus ventajas competitivas menciona que tiene una gran facilidad de uso con una interfaz amistosa y entretenida. Cuenta con una pantalla sensible al tacto y una forma de trabajo muy intuitiva, eficiente y sencilla de manejar. Interfaz en español y con una perfecta adaptación a las preferencias personales del usuario. El sistema está compuesto por una pantalla táctil de cristal líquido, CPU en una caja metálica donde va alojada la electrónica del sistema, lector de llave digital y 2 llaves digitales personales para el control del sistema. Un sistema básico ofrecería los siguientes servicios:. •. Control absoluto de 5 grupos de luces de hasta 500W cada uno .. •. Sistema de alarma completo de 8 zonas. •. Simulación de presencia .. •. A viso automático de al celular en caso de emergencia. •. Control de funciones del CARDIO a través de teléfonos internos. • •. Monitoreo remoto del CARDIO a través de un servicio externo Manejo completo de Escenas (Macros programables). •. Asociación automática de control de luces a sensores de seguridad. •. Manejo de emergencias. (Médico, Bomberos, Policía). •. Registro automático en memoria de los últimos 100 eventos . Agenda electrónica en pantalla para avisos programables. • •. Información de la temperatura ambiente. 1.5 Objetivo del proyecto. Diseñar un sistema de automatización modular, flexible y escalable para el hogar, controlado a través de computadoras y dispositivos móviles, de manera local y remota.. 1.6 Objetivos específicos. El sistema terminado tendrá las siguientes capacidades.. • • •. Control del sistema totalmente inalámbrico Sistema modular con amplia capacidad de crecimiento Adaptable a cualquier número de usuarios dentro de un hogar. •. Diseño de infraestructura personalizable, tanto alámbrica, inalámbrica o híbrida. •. Interfaz amigable y de fácil uso para usuarios 11.
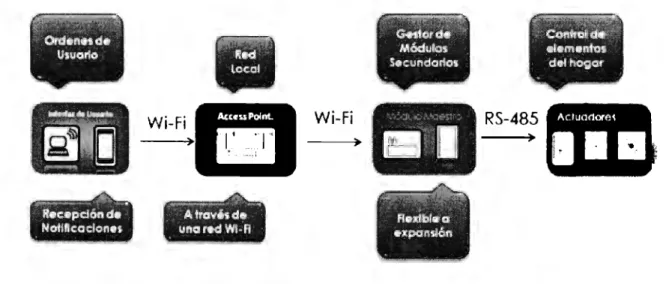
(10) •. Facilidad de instalación. 1.7 Metas Considerando los objetivos anteriores, y con la finalidad de desarrollar un prototipo funcional, propusimos alcanzar las siguientes metas:. • Infraestructura Wi-Fi-"Rabbit" . • Interfaz de Usuario Intuitiva y Configurable . • •. Comunicación Wi-Fi desde dispositivos Apple .. •. Reconocimiento alámbrico por Software. (Maestro/Esclavo) .. •. Desarrollo de interfaces para Actuadores .. •. Integración de nuevos Actuadores .. •. Integración del Sistema Prototipo .. Bus de datos con Comunicación RS-485 .. l.8 Descripción del proyecto.. El proyecto es un sistema modular, capaz de llevar el control de diversos elementos del hogar, a través de una red Wi-Fi local y por medio de un modulo central con conexión Wi-Fi, éste recibirá ordenes por dicho medio desde computadoras o dispositivos móviles, ya sean teléfonos Smartphone, iPods y iPads, primera parte del diagrama de la Figura 1. El módulo central, segundo mostrado en la Figura 1, llevará la gestión de otros módulos secundarios que son los encargados de realizar las acciones de cada actuador en la casa. Buscando además que estos módulos sean anexados con simplicidad para expandir el sistema, igualmente ofrecer una flexibilidad en cuanto a la cantidad y tipo de módulos secundarios sobre toda la casa. Hablando específicamente del módulo principal, esté constará de dos partes, un microcontrolador maestro que gestionará todas las acciones y procesará las instrucciones, repartiéndolas a los elementos que tenga directamente conectados; también contará con un módulo Rabbit Wi-Fi que se encargará de las comunicaciones inalámbricas, tanto con las aplicaciones de los usuarios como de módulos Rabbit secundarios. Para completar el sistema modular, última parte del diagrama de la Figura l, contamos con módulos esclavos independientes, estos pueden tener comunicación al maestro de dos maneras. La primera de forma alambrada, conectándose directamente por medio de un puerto serial RS-485 para soportar las largas distancias a lo largo del hogar, la 12.
(11) segundo es de manera inalámbrica por medio de la red Wi-Fi y asistidos por un módulo Rabbit inalámbrico. Estos módulos esclavos tendrán las tareas más básicas pero también más importantes, por un lado escucharan las órdenes del módulo maestro y entonces llevaran a cabo las acciones que indiquen dichas instrucciones.. ~. ~ ' Gfllord• '. : Otdenesde Usuario. Módul~ Secundarios. ......,,.,_,..,.._ _ _ _ _. ~¡. - ;¡. Recepclón de. Notlftcaclonos. -. .. •. Acc..s Polnt.. Wi-Fi. __. ,,,,,_. ~. Wi-Fi. .. -- ,.. . : :J•. : .'.' ,•: ; · :. mi . -~·. .:;-- '"' ' "' Roxlblea expansión. ;,.,,. A través de unarodWI-R. .. -. -. -·-- -. Figura I Módulos del proyecto. 13. ~. ';s. Control d••8* elementos del hogar. RS-485t:m.
(12) 14.
(13) Marco Teórico.. 2.1 Plataforma Apple.. A pesar de que "IOS" de "Apple" no encabeza las ventas de "SmartPhones" en el mundo, se debe considerar que el desarrollo de aplicaciones no se limita únicamente al dispositivo que compite en este rubro, pues sumado al iPhone, Apple sacó a la venta otros dos dispositivos móviles capaces de cubrir la gran parte de las necesidades de los usuarios. Con el "iPad" y el "iPod", la empresa ha logrado posicionarse como la número uno en venta de aplicaciones móviles. Llevando esto a los números, la venta de aplicaciones empezó en Julio de 2008; para finales de ese año, se tenían registradas 200 millones de descargas de las 7,500 aplicaciones disponibles. Para Noviembre de 2009 se tenían ya contabilizadas las 2 billones de descargas, con un desarrollo de 100 mil aplicaciones. En Octubre de 201 O el desarrollo de aplicaciones creció a más de 300 mil aplicaciones y 7 billones de descargas. Como se puede ver el crecimiento de esta industria y bajo esta firma ha sido descomunal, y en este camino ascendente, Apple anunció el 22 de Enero de este año (2011) las 1O billones de descargas contando con más de 350 mil aplicaciones en 90 países[ 3l_ Tabla I Ventas y Descargas de Aplicaciones en AppStore. Fecha. # de Aplicaciones. 141. # de Descargas. Julio 11, 2008. 500. o. Julio 14, 2008. 800. 10,000,000. Septiembre 9, 2008. 3,000. 55,000,000. Octubre 22, 2008. 7,500. 200,000,000. Enero 16, 2009. 15,000. 500,000,000. Marzo 17, 2009. 25,000. 800,000,000. Abril 23, 2009. 35,000. 1,000,000,000. June 8, 2009. 50,000. 1,000,000,000+. Julio 11, 2009. 55,000. 1,000,000,000+. Julio 14, 2009. 65,000. 1,500,000,000. Septiembre 9, 2009. 75,000. 1,800,000,000. Septiembre 28, 2009. 85,000. 2,000,000,000. Noviembre 4, 2009. 100,000. 2,000,000,000+. Enero 5, 2010. 120,000. 3,000,000,000+. Marzo 20, 2010. 150,000+. 3,000,000,000+. 15.
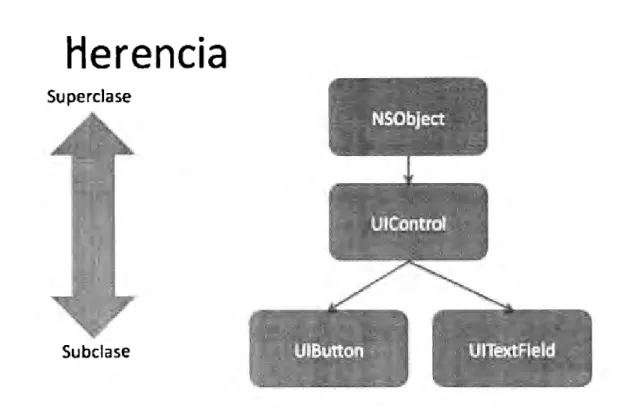
(14) Abril 8, 201 O. 185,000+. 4,000,000,000+. Abril 29, 2010. 200,000+. 4,500,000,000+. June 7, 2010. 225,000+. 5,000,000,000+. Septiembre 1, 2010. 250,000+. 6,500,000,000+. Octubre 20, 201 O. 300,000+. 7 ,000,000,000+. Enero 16, 2011. 300,000+ 350,000+. 9,000,000,00o+ l 0,000,000,000. Enero 22, 2011. 2. l.1 Herramientas de desarrollo Apple.. Las aplicaciones desarrolladas en la plataforma Apple son de dos tipos: aplicaciones nativas, y aplicaciones web específicas. Las aplicaciones web son aquellas páginas de internet en las que se busca tener un diseño específico para el dispositivo, con el ''.frame" adaptado al tamaño del "display" de los dispositivos móviles diseñados por Apple. La plataforma de desarrollo para estas aplicaciones se llama "Dashcode" Por su parte, las aplicaciones nativas son las que se encuentran alojadas en el dispositivo. Estas utilizan "Xcode" como herramienta de desarrollo, y la programación es a través del lenguaje "Objective C'. Además de Xcode, Apple también provee otras herramientas para el desarrollo de aplicaciones, siendo "Interface Builder" la utilizada para crear las vistas gráficas (archivo ".xib"), que serán la presentación visual para el usuario. El uso de ésta herramienta esta directamente ligado al desarrollo de código en Xcode, ya que para hacer la conexión, se necesita que los objetos, métodos, eventos, base de datos, etc., estén declarados en la interface del programa; una vez hecho lo anterior, Interface Builder habilitará dichos objetos, métodos, eventos y base de datos, dejando al desarrollador únicamente la tarea de colocar objetos como botones, etiquetas, etc. Finalmente hacer la conexión con su nombre declarado en la interface y los métodos atribuidos al mismo a través de un "click and drag".. 2.1.2 Fundamentos del lenguaje de desarrollo: "Objective C". El lenguaje "Objective C" esta colocando entre los lenguajes denominados "Orientado a Objetos", en el cuál también existe una estructura jerárquica con la herencia como enlace entre los distintos niveles. 16.
(15) Herencia Superclase. Subclase. Figura 2 llcrencia principal de "Objective C". Además, el lenguaje esta estructurado en clases, y repite algunos otros conceptos comunes como "objeto", "método", "variable de instancia", etc. Las características y elementos básicos son los siguientes:. • • • •. Integración de directivas de lenguaje C. Manejo de variables primitivas . Objeto: cuenta con características específicas (variables) y un comportamiento específico (Métodos). Mono-herencia: una Subclase solo puede heredar de una y solo una Superclase . Manejo dinámico de objetos: la locación en memoria es dinámica. No existe un ''Garbage Collector".. 2.1.3 Manejo de Memoria. Uno de los puntos mas importantes en el desarrollo de aplicaciones móviles es la importancia del manejo de memoria, ya que como es lógico, estos dispositivos tienen una cantidad limitada de RAM, por lo que este recurso debe ser optimizado teniendo un uso eficiente de los elementos en "pila".. Aunado a esto, se debe tomar en cuenta que no existe dentro del manejo de memoria un "Garbage Collector", es decir, que el manejador de memoria no sacará de la pila los objetos creados de manera automática, por lo que deben ser sacados a 17.
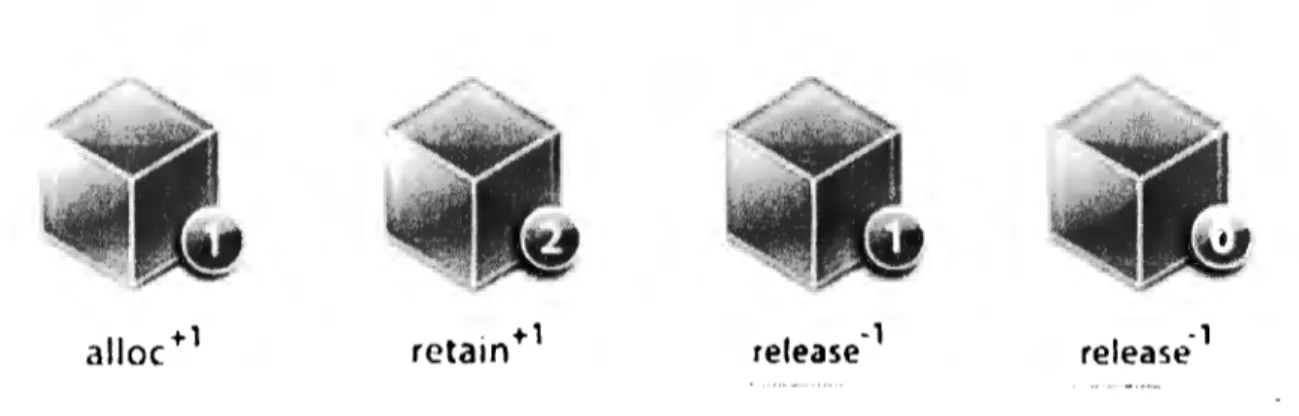
(16) través de una instrucción de programación; un mal manejo de memoria puede concluir con una terminación abrupta de la aplicación. Todo lo anterior se resume como un ciclo de vida de los objetos con tres fases: creación, manejo de memoria, y destrucción de objetos.. 2.1.3.1 Creación de objetos. La creación se conforma de dos partes: •. •. Locación de memoria para el objeto: se utiliza el método de clase "a/loe", el cuál indica cuanta memoria es necesaria para alojar el objeto. Cabe señalar que sin la entrega de espacio en memoria para el objeto, simplemente éste no existirá, y por lo tanto, ningún cambio surtirá efecto en él. Inicialización del objeto: la inicialización es llevada a cabo a través del método "init", cuya finalidad es la de indicar los valores iniciales. En el lenguaje "Java", este método es llamado "método constructor". 2.1.3.2 Manejo de Memoria y Destrucción de Objetos. Como consecuencia de entregar un espacio en memoria al objeto, es necesario recuperar dicho espacio una vez finalizado el uso del mismo. Esto se lleva a cabo a través del método "deal/oc", con ello Objective C liberará el espacio en memoria.. locación. Destrucción. e. mal loe. free. Objective-C. al loe. dealloc. Figura ] Directirns de creación y destrucción de objetos. Existe también un contador de pila; para manejarlo, existen directivas de programación, es decir, cuando un objeto es creado se le asigna un numero 1, estas directivas tienen la capacidad de aumentar o disminuir este número; el objeto se mantendrá dentro de la pila mientras este contador sea superior a O. Las directivas son:. • "alloc" y "copy": crean el objeto con un contador igual a 1. • "retain": incrementa el contador en 1. •. "release": decrementa el contador en 1. 18.
(17) . +1. retam. release. -1. -1. release. Figura 4 Directivas de control de "Contador de Pila". El método "dea//oc" tiene como finalidad llamar a la directiva reléase las veces necesarias.. 2.3 Wi-Fi. Wi-Fi es el nombre dado por la Wi-Fi Alliance para el estándar de la IEEE 802.11, donde están definidos las iniciales WLANs, para Wireless Local Area Networks (redes de área local inalámbricas). En su forma más básica, Wi-Fi es la transmisión de señales de radio. La norma de 802.11 define el uso de los dos niveles inferiores de la arquitectura OSI, capa física y de enlace de datos, especificando sus normas de funcionamiento en una Wireless LAN. 802.11 es un protocolo de paquetes que define la transmisión de datos y gestiona acceso a la red independiente de a ubicación, usando señales de radio. El medio de transmisión utilizado para la norma 802.1 I es la radio frecuencia usando las bandas de 2.4Ghz y 5.4Ghz. Los puntos de acceso son puentes que funcionan para conectar dos redes con niveles de enlace ya sean parecidos o totalmente distintos. El conjunto de servicio básico está conformado de dos formas distintas. La primera es de manera independiente, donde las estaciones se comunican directamente entre sí (adhoc). La segunda manera es conocida como infraestructura que es cuando todas las estaciones llegan a un punto de acceso.. 19.
(18) Wi-Fi, diseñado para conexiones de corta distancia, con un alcance menor a 100 metros por punto de acceso, en mayores distancias se pueden presentar interferencias. Los estándares abarcados por la certificación de Wi-Fi son derivaciones del 802.11 y comprende sus versiones; 802.11 b, 802.11 g y 801.11 n, con velocidades de 11 Mbps, 54Mbps y 300Mbps respectivamente. La seguridad en las redes Wi-Fi está presente por medio de métodos de encriptación para el envío de datos, la más común y utilizada en las redes inalámbricas es la codificación WEP, este algoritmo cifra los datos con llaves de 64 o 128 bits. Los puntos de interconexión Wi-Fi bien pueden ser enrutadores dedicados o puntos de acceso conocidos "Acces Points (AP)" que emiten la señal de Radio Frecuencia. Los AP, funcionan como un emisor remoto, como un repetidor de la señal para áreas que el enrutador no alcanza. Por otro lado, los enrutadores se encargan de todos los procesos inherentes de la comunicación, recepción, procesamiento y emisión de la señales, con control de errores y extracción de la información. Las principales ventajas de las redes Wi-Fi son, su comodidad y más fácil implementación que una red alambrada. Una vez implementadas no representa ningún gasto adicional la adición de equipos que operen en la red. Por último la WI-FI Alliance certifica todos aquellos dispositivos que pretendan usar la tecnología y esto garantiza la compatibilidad entre ellos sin importar el lugar de desarrollo. Entre los principales beneficios de una red Wi-Fi se pueden contar los siguientes:. •. Ethernet inalámbrica, Wi-Fi puede funcionar como un remplazo de la Ethernet, ambos siendo estándares de la IEEE 802 comparten varios elementos esenciales.. •. Acceso extendido, la ausencia de alambres y cables permiten el acceso a lugares donde estos no pueden llegar o resulta muy caro la implementación de éstos mismos. • Reducción de costo, reducción de materiales, tanto en cables como los elementos necesarios para su instalación. • Movilidad, la ausencia de cables permiten libertad para cambiar de locación sin perder la conexión. • Flexibilidad, el conjunto de todo lo anterior crea oportunidades para nuevas y diversas aplicaciones que puedan perdurar en el tiempo. Aplicaciones de Wi-Fi en sistemas embebidos.. 20.
(19) Actualmente las oportunidades de desarrollo de sistemas embebidos continúan creciendo, gracias a todas las ventajas que ofrece que pueden ser aprovechadas en los siguientes ámbitos. •. Procesos Industriales y control de aplicaciones, donde las conexiones cableadas son o muy costosas o inconvenientes.. •. Aplicaciones de emergencia que requieren atención inmediata.. •. Aplicaciones móviles.. •. Cámaras de vigilancia.. •. Comunicación con otros dispositivos Wi-Fi, como laptop o PDA 's. 2.4 Microcontroladores. Se le da el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos en un diseño electrónico. Un microcontrolador es un circuito de alta escala de integración que incorpora la mayor parte de los elementos que configuran un controlador. En un microcontrolador se tiene normalmente de los siguientes componentes: Procesador o CPU (Unidad Central de Proceso). Memoria RAM. Memoria de programa: ROM, PROM, EPROM. Puertos de E/S (entrada o salida) para la comunicación con el exterior. Distintos módulos para el control de periféricos: temporizadores (timers), Puertos seriales y paralelos, ADC (Convertidores analógico-digital), DAC (Convertidores digital-analógico), etc. -. Generador de impulsos de reloj que sincronizan el funcionamiento de todo el sistema.. 2.5 Comunicaciones Serial (USART TTL). 2.5.1 Tipos de Comunicaciones Seriales:. La comunicación serial es una forma de enviar los datos bit a bit a un destino por un mismo canal. Dentro de la comunicación serial existen dos maneras de establecerla, síncrona y asíncrona.. 21.
(20) En la forma de comunicación serial síncrona, se tienen dos líneas de transmisión, en la primera se transmiten los datos y en la segunda la señal del reloj de sincronía, que indicarán cuando un dato es válido, de aquí su nombre síncrona, algunos de los ejemplos más utilizados de esta comunicación son: SPI TWI o I2C One wire En la comunicación serial asíncrona, tenemos que no son necesarios los pulsos de sincronía que necesitábamos en la comunicación serial síncrona, esto se debe a que cada dispositivo generará su propia señal de reloj para determinar los caracteres de las tramas; la duración de cada bit está previamente determinada y programada en cada módulo, por la velocidad con la cual se va ha realizar la transferencia de datos, por lo que tenemos que cada dispositivo deberá tener programada la misma velocidad de transferencia.. Regularmente cuando no se está realizando ninguna transferencia de datos, la línea del transmisor se encuentra en estado de "idle" este quiere decir en etapa de alto, esperando a que se quiera empezar a transmitir. Para poder iniciar la transmisión, el transmisor coloca la línea de transmisión en bajo o "O" lógico, durante un tiempo fijo, lo cual se le conoce como bit de arranque o "start bit", después de este bit de arranque se puede empezar a transmitir los bits de datos empezando siempre por el bit menos significativo (LSB), y terminando con el bit más significativo, teniendo así un bit de parada o "stop bit" como lo muestra la Figura 5.. '1)". Nu<?vo Caract~r. !''. t. L. t 81~ de raracta "1". Figura 5 Formato de trasmisión asíncrona. Si el receptor no está sincronizado con el transmisor, ya sea por que no se tienen configurados a la misma velocidad de transmisión o porqué existen fallas en la línea de transmisión por ser demasiado larga, este desconoce cuándo se van a recibir los datos, por lo que el transmisor y el receptor deberán tener los mismos parámetros de velocidad, paridad, número de bits del dato transmitido y de Bit de arranque y de parada. En los circuitos digitales, en los cuales las distancias entre dispositivos que se van a comunicar vía serial son relativamente cortas, se pueden usar niveles lógicos o TTL, de O a. 22.
(21) 5V, que son los niveles que entregan los microcontroladores, y que funcionan bien siempre y cuando las distancias entre estos no sean grandes.. 2.5.2 Margen de ruido.. La definición de ruido en un circuito con señales TTL se puede tomar como una señal aleatoria no deseada producida por la acción de campos electromagnéticos, entre las causas que lo generan pueden estar una línea cercana de la red eléctrica, la acción de conmutadores eléctricos, motores cercanos, etc. Estos efectos eléctricos no deseados y perjudiciales, inducen voltajes en los cables de conexión entre los circuitos lógicos o en las patas de entrada de estos dispositivos y estos voltajes y corrientes pueden ocasionar que el voltaje de entrada a un circuito caiga por debajo del valor mínimo que entiende como "l" (VlH,mín) o exceda del valor máximo que entiende como "O" (VIL,máx), lo cual puede generar distorsión en nuestra información transmitida.. 2.5.3 Ventajas y desventajas de la comunicación en serie.. En circuitos digitales cuyas distancias son relativamente cortas, se pueden manejar transmisiones en niveles lógicos TTL (0-5V), pero cuando las distancias aumentan, estas señales tienden a distorsionarse debido al efecto capacitivo de los conductores, su resistencia eléctrica y la presencia de campos electromagnéticos. El efecto se incrementa a medida que se incrementa la velocidad de la transmisión. Una de las soluciones más lógica es aumentar los márgenes de voltaje con que se transmiten los datos, de tal manera que las perturbaciones a causa de la línea se pueden disminuir, pero al aumentar los valores de voltaje, también aumenta la potencia que estos disipan, lo que hace que esta solución no sea la más eficiente. Algunos de los inconvenientes de la transmisión serial son: En la transmisión serial se debe saber cuanto dura el tiempo de bit, y con este tiempo se debe de buscar dentro de la cadena la posición de cada bit que se desea saber. Un enlace serie requiere más tiempo para transmitir un carácter que un enlace paralelo y el tiempo necesario para transmitir toda la trama con n-bits en una transmisión serie es al menos n veces mayor que en una transmisión paralelo.. 23.
(22) Dado a estos inconvenientes que tiene las comunicaciones seriales TTL, en este caso la comunicación USART, TWI o SPI que tienen los microcontroladores, se decidió cambiar a otro tipo de comunicación, en este caso RS-485.. 2.5.4 Comunicación RS-485. La comunicación RS-485 o también conocido como EIA-485, es un estándar de comunicaciones que basa su funcionamiento en el bus de la capa física del Modelo OSI. El protocolo RS-485 está definido como un sistema en bus de transmisión multipunto, es una comunicación diferencial que es ideal para transmitir a altas velocidades sobre largas distancias que van desde 35 Mbps con una distancia I O metros y l 00 Kbps con una distancia 1200 metros, este tipo de comunicación puede ser transmitida a través de canales ruidosos, ya que se reducen los ruidos que aparecen por los voltajes y corrientes producidos en la línea de transmisión, por las razones comentadas anteriormente. El protocolo establece que el medio físico de transmisión tiene que ser un par trenzado, con una longitud máxima de 1200 metros. La interfaz RS-485 ha sido desarrollada para la transmisión de forma serial de datos de alta velocidad y a grandes distancias, como lo muestra la Figura 6, esta se encuentra creciente aplicación en el sector industrial, debido a su gran inmunidad el ruido y a que se tiene muy buen alcance de distancia a velocidades bastante considerables. El Bus RS-485 puede instalarse tanto como sistema de 2 hilos o de 4 hilos.. 1 .... lil ... :a. Figura 6 Relación, velocidad vs distancia. 24. 'lA.
(23) Bus de 2 hilos RS-485 El Bus de 2 hilos RS-485 se conecta como lo muestra la Figura 7, con un cable propio como Bus con una longitud máxima de 500m. Los demás micro-procesadores se conectan a este cable a través de una línea adaptadora de máximo 5 metros de longitud. La ventaja de la técnica de 2 hilos radica esencialmente en la capacidad multi-master, en donde cualquier micro-procesador puede cambiar datos en principio con cualquier otro. El Bus de 2 hilos es básicamente sólo semi-dúplex. Es decir puesto que sólo hay a disposición una vía de transmisión, siempre puede enviar datos un solo micro-procesador. Sólo después de finalizar el envío, pueden transmitir los otros microprocesadores. La aplicación más conocida basada en la técnica de 2 hilos es el PROFIBUS.. RS435 device. RS435. Bus cable max. 500 m. device. AJ. 81+-. RS435 device. Device cable max. 5 m. Figura 7 RS-485 con 2 hilos. Bus de 4 hilos RS485. La conexión de 4 hilos sólo puede ser usada en aplicaciones maestro-esclavo como lo muestra la Figura 8, en donde se cablea aquí la salida de datos del Maestro a las entradas de datos de todos los esclavos. Las salidas de datos de los servidores están concebidas conjuntamente en la entrada de datos del Maestro.. 25.
(24) RS435 Master T+. T- R+. Bus cable. max. 500 m R-. T-. Device cable max. 5 m. T+ R- R+ RS'85 Slave. Figura 8 RS-485 con 4 hilos. Método fisico de transmisión: Los datos en serie, como en interfaces RS-422, se transmiten sin relación de masa como diferencia de voltajes entre dos líneas correspondientes. Para cada señal a transmitir existe un par de conductores que se compone de una línea de señales invertida y otra no invertida. La línea invertida se caracteriza por regla general por el índice "A" o "-", mientras que la línea no invertida lleva "B" o "+". El receptor evalúa solamente la diferencia existente entre ambas líneas, de modo que las modalidades comunes de perturbación en la línea de transmisión no falsifican la señal útil. Los transmisores RS-485 ponen a disposición bajo carga un nivel de salida de ±2V entre las dos salidas, como lo muestra la Figura 9; los módulos de recepción reconocen el nivel de ±200mV como señal válida. La asignación de voltaje de diferencia al estado lógico se define del modo siguiente:. • •. A - B < -0,3V = MARK =OFF= Lógico 1 A - B > +0,3V = SPACE = ON = Lógico O. . ... ··~. t.::A":t. tftvtí.iat:.I ';;4)(.,1.. T •.•. SV<>. .... ·t·. - - t-. __L. ••• ·r -,. e 0111.in i e ad ón us~P T. COlltlnicación PS-485. Figura 9 Diferencia entre USART y RS-485. 26. -~.:.. rt ev:;~:k.l •. -~. ff'.!' ~,.
(25) 27.
(26) Desarrollo 3.1 Aplicación móvil. Para diseñar la una aplicación dedicada a la automatización, se debe planificar desde la perspectiva de un usuario final, pero previendo distintos tipos de escenarios como lo es el uso exclusivo de ciertos aparatos, de privilegios y niveles de usuario, y hasta un nivel de servicio técnico, además de ser sencilla de usar, entender, visualizar, y que el usuario final la utilices de manera intuitiva. Es por esto que la aplicación se desarrollo pensando en las siguientes características:. •. Conexión Wi-Fi dinámica con el dispositivo "Maestro del Sistema".. •. Estar basada en privilegios de usuario (Servicio Técnico, Administrador, y Usuario de bajos privilegios).. •. Sencillo manejo de las distintos comportamientos de los actuadores .. • Configuraciones de Administrador y Usuario de bajos privilegios . •. Recepción de notificaciones de conectividad .. •. Base de datos interna de usuarios y actuadores .. •. Personalización de usuario .. 3.1.1 Bases de datos. Para el dearrollo de base de Datos fue necesano el uso de la librería "libsqlite3.0.dylib", provista por Xcode como parte de los "Frameworks" disponibles. En esta librería se utilizan cadenas de caracteres especiales las cuales indican la función a realizar. Para la aplicación se utilizaron 4, lectura, escritura, borrado y actualización. En la base de datos se definió una tabla llamada "my Actuators", que se puede observar en la Figura I O, con la siguiente estructura de datos: idActuator. user. actuatorType. description. authorizad. actuatorlD. notification. actuatorName. int. Text. Text. Text. int. int. int. Text. •. idActuator: indica el id con el quese identifica al elemento en la base de datos .. •. User: indica si el elemento pertenece al usuario del dispositivo o es un actuador en general.. • actautorType: indica el tipo de actuador como lo puede ser "Luz", "Puerta", etc . •. description: es una pequeña descripción del actuador para identificarlo . 28.
(27) •. Authorized: indica si este elemento va a estar habilitado para el usuano del. •. dipositivo. actuatorID: identificador del sistema.. •. Notification, indicaro de receptción de notificaciones.. •. actuatorName: bombre del actuador. Type. Column ID. Name. o. idActuator. INTEGER. l. user. TEXT. 2. actuatorType. TEXT. 3. description. TEXT. 4. authorized. INTEGER. s. actuatorlD. INTEGER. 6. notification. INTEGER. 7. actuatorName. TEXT. ----------· --·--··----·--------. Figura 10 Base de datos my Actuators. 3.1.2 Conexión Wi-Fi. El manejo de objetos dedicados a las conexiones Wi-Fi en la plataforma escogida resultan un tanto enredados y difíciles de usar, es por eso que se busco la manera de facilitar el trabajo de modo que pudiéramos tener éxito en la conexión y envío de datos a través de una red local, y utilizando la estructura básica de "socket-puerto". Debido a que finalmente Applc tiene desarrollo de manera libre, se utilizó una librería dedicada única y exclusivamente a la disminución de trabajo en el uso de herramientas Wi-Fi llamada "Cocoa Async Socket". Para llegar al objetivo deseado usamos la estructura que se muestra en Figura 11, para el uso y creación de la conexión:. 29.
(28) • #import "AsyncSocket.h" • [asyncSocket setRunLoopModes:[[NSArray arrayWithObject:NSDefau ltRunLoopMode] reta in]];. •[asyncSocket connectToHost:h ost onPort: 40000 error:&err];. • [as ncSocket isConnected. Figura 11 Conexión de socket. La escritura y transmisión se llevo a cabo a través del método "writeData": -(void)writeData:(NSData *)data withTimeout:(NSTimelnterval)timeout tag:(long)tag. 3.1.3 Vistas ele usuario.. La aplicación está hecha para ser controlada a través de pequeñas "tabs" en donde se puede pasar por las distintas vistas de usuario.. ~. l:11z Jho,,ny _ ,. .. luzhfoJ,o,w,y. r--¡ 1. PllertoPri~. 1. li1%~. P:. l¡. Figura 12 Vistas de usuario. 30.
(29) 3.1.4 Vista de Actuadores. En esta vista se pretende tener. un panorama completo de los actuadores. disponibles, además del control de encendido y apagado de los mismos, además de un controlador de intensidad o grado, el cual solo aparecerá en caso de que los actuadores lo requieran. Estos controles serán deshabilitados en caso de que la aplicación carezca de conexión con el modulo Maestro de nuestro sistema. '!. · Luz Jhoni;iy '! -1:~ , jt. '~ Luz 8. u·ro' nonny '. Puerta. ¡. Principdl! ,. Luz entrada P. , .. Figura 13 Vista de actuadores. Otra capacidad que permite esta vista es la de configurar el orden de los objetos, si se quieren primeramente los del usuario en cuestión, o los objetos generales.. , ( J~,º"~!, ; (G;f,."'º1) Luz Jhonht . ' ,. Luz Buro·dhonnt. Figura 14 Vista de actuadores por objeto. 3.1.5 Vistas de Configuración de Usuario.. En esta vista el usuario podrá personalizar su aplicación de 3 cosas fundamentalmente: El nombre que aparezca en todas las vistas de la aplicación, el fondo de la misma, y de que dispositivos desea recibir notificaciones.. 31.
(30) Figura 15 Vista de configuración de usuario. Además puede realizar y verificar la conexión con el modulo maestro gracias a un botón de conexión el cual se incluye tanto en configuraciones de Usuario como de Administrador. Para cambiar a la vista de configuraciones de administrador se tiene el botón en la parte superior derecha. _____. .....,.,.,...... _______________. Usuario. --. D. Figura 16 Vista de conexión. 3.1.6 Vista de Configuraciones de Administrador. Esta vista está sujeta a privilegios, por lo tanto estú protegida a través de un código.. Figura 17 Entrada de contraseña. 32.
(31) Una vez introducido el código correcto, esta vista permite el acceso a las configuraciones o de administrador, cuya capacidad consiste en bloquear funciones de la aplicación que el usuario no puede realizar sin la contraseña. Estas restricciones consisten en 3 reglas principalmente: indicar que objetos son del usuario, que objetos están habilitados tanto de actuadores generales como personales, y que notificaciones recibirá de los actuadores generales. 3 .1. 7 Vista de Soporte Técnico. Por último ésta vista tiene como objetivo el de dar de alta nuevos actuadores, es decir, es la única vista que puede crear como tal, objetos nuevos en la base de datos. Posteriormente de introducir la contraseña se tiene disponibles los distintos campos con los cuales se llenara la información de los objetos agregados a la Base de Datos.. 1 Descripción. j. Figura 18 Vista de soporte técnico. 33.
(32) 3.2 Módulos inalámbricos 3.2.1 Sistema de Red local. Sistema de la red local. Para tener el control de todos los elementos en nuestra casa inteligente se desarrolló un sistema de comunicación inalámbrica por medio de la tecnología Wi-Fi, en la topología mostrada en· la Figura 19, podemos observar que el enrutador inalámbrico funciona como centro de comunicación del sistema, ofreciendo conectividad Wi-Fi a todos los elementos de la red, dando la capacidad al modulo Rabbit de funcionar como un servidor que atenderá como clientes a todos los dispositivos que comparten la red.. Network processor "Rabb«" Palm. ,r.t&c G5. Wireless rcarter. Compulaóora. Smartphone. Figura 19 Topología de la red. El módulo Rabbit tiene un lugar en nuestra topología como un elemento más de la red, pero es el servidor que atenderá las peticiones de los clientes que son todos los dispositivos móviles dentro de la red. El Rabbit tiene una función de multiservidor al ser. 34.
(33) capaz de atender las peticiones de todos los clientes sin importar el número de ellos y puede abrir y cerrar conexión con cada uno de forma dinámica. Por otro lado, el módulo Rabbit es un elemento más de la red con una infraestructura ya existente. Una red inalámbrica constituida por un enrutador inalámbrico o también por un AP que son los que brindan el servicio inalámbrico. El módulo toma dirección IP por medio del servicio DHCP (Dinamic Host Configuration Protocol), dirección que le servirá como identificador dentro de la red para que los clientes puedan establecer una conexión a con él. El módulo Rabbit has sido programado para ser totalmente configurable una vez se encuentre instalado el sitio final para su uso. Por medio de una comunicación serial a través de un puerto USB este puede establecer una conexión a su puerto de configuración. Con esta comunicación el usuario tiene la posibilidad de configurar la red inalámbrica para el módulo Rabbit, en la Figura 20 se puede observar ejemplo de la interfaz ofrecida por medio del programa hyper terminal, en la cual se muestra la búsqueda que hiso el módulo Rabbit de las redes inalámbricas disponibles. ~ ~ - ,..... t} Rabllil · HypuT•rmlM1. 1~dt;o. ~ ,,,.. ~. .... e!>. ~. !!"'-. ºª. !!-'..,,. .. 'i>'. H. ,.. '1',V'. w. "'"''l- JI.OJJ.;t. ,.l'~ ·-····. di'. ". Henu Pres ionar b puru buscar los AP di sponibles Pres ionar d pard buscar y asoc iar d un AP Pres ioner M para ver el estatus de la MAC CoMenzando busQueda . .. BSS ac tual es : Red Conol Pot encia. HAC. SSID. 00 :0c :41 :14 :e3 :3c;. llinksys -g). --------------------------------------------------------------0 68 11 00 :21 :7c :d3 :8c :91: lSIVERI 1. 59. 6. Seleccionar uno nuev.:, BSS o sa lir ( (0- 1. s para salir) l 1 La red USd password de cifrado? Is /ni BSS seleccionada : [linksys-gl Henu. Pres ionar b para buscar los AP di sponibl es Pres ionar a para buscar y asociar 8 un AP Presionar 11 para ver el es1atus de la MAC. )l(l2:56 ~. '. ~w. 96'»-I. t:¾-;.,;.·;:-. .. M. f. ... .,. :• ,;'#,r,. -. -. t·. Figura 20 Búsqueda de Red. En el ejemplo anterior contamos con dos redes disponibles, siempre mostradas en orden por cual red tiene mayor potencia de señal, entre la información que podemos visualizar encontramos el canal por el cual se transmite cada red, el nivel de potencia, la. 35.
(34) dirección MAC o física del punto de acceso y el SSID de la red o nombre. Esta información es necesana para que el usuario identifique su red entre todo el ambiente inalámbrico disponible. Una vez identificada la red el Rabbit puede asociarse a ella tecleando el número que se le asignó, que también es mostrado en pantalla y está mostrado en la primera columna bajo el nombre de Red (Figura 20). Se puede asociar a redes con o sin cifrado, sea WEP o W AP, en caso de una red protegida con cifrado o clave, la interfaz pedirá que se ingrese la clave. Una vez configurados los anteriores parámetros el módulo Rabbit puede ingresar a la red, obteniendo una dirección IP e integrándose como otro elemento de la red. La dirección IP que se le asigne será mostrada en pantalla además de ofrecer la opción de elegir un número de puerto para dar de alta el módulo Rabbit como servidor. En la Figura 21 podemos observar cuando el Rabbit inicializa el modo de servidor, en la primera línea contamos con la información de red necesaria para establecer conexión desde cualquier dispositivo móvil. También en la pantalla podemos observar la cantidad de sockets abiertos comenzando el ordinal desde el número "O". En este caso el número de sockets de flujo dados de alta fue de 5. Oh. C)Rabbit · HyfH!rT•rminel , .... <M-o ~ '.t11t V-- !r.wf•• ~. !1""'"!>::1:'t:;;i'"'. -~. -....... ··=-,¡;;. ~. ~.l'.C';.,.. A)'\¡de. ;:,,¡¡. 1 ' {.. lln i,~. --. r·, J .Oc9 di'. ". Servidor Int erface tt1ble : lt IP addr . Mask Uo -- ------------·--- --------------- ---. Type. -- ---. 0 192 .168 . l.14S 255.2SS. 2SS .128 yes eth Deler•iM un puerto : 40000 Esperando Cone><ion en el socke t : 0. MTU Flags Peer/router. ---- ------. 1489 •DO. --------------10 .10.6 .1. i. Esper ando Cone><ion en e l socket : 1 ¡ l. Esper ando Cone><ion en e l socket : 2. 1. Esperando Cone><ion en e l socke t : 3 Esoer ando Cone><ion en el socket : 4. ·- .. Q:00:Je{Q(>!IC;t..Jo. ~. 'l«O~I. W.-\j,,¡;.:;. \~y. ~. •7,i;l~t,. lt<*'Jf::ir. Figura 21 Rabbit en modo servidor. 36. - --..,..
(35) Cada socket de flujo permite una conexión separada e independiente con un solo elemento en la red, de esta forma el Rabbit se encarga de recibir los datos de cualquier destino y repartirlos a todos los clientes que tenga conectados, sean dispositivos móviles u otros módulos Rabbit secundarios. Finalmente, gracias a la conexión serial con la computara podemos visualizar el flujo de datos a través del Rabbit, está función es sólo para monitoreo porque sólo nos muestra los bytes que se intercambian, sin ningún significado ya que estos sólo toman sentido al llegar al microcontrolador del actuador final. Estos últimos datos que podemos visualizar, son los mismos que pasan por medio de una conexión USART a un microcontrolador que asiste al módulo Rabbit con las conexiones alambradas para hacer llegar las instrucciones a los actuadores finales. El anterior proceso se encuentra resumido en el diagrama de flujo de la Figura 22.. Administración de Red Modo irlraestruciura_ SSID "Red Locar. C1lraco {nmgyna, WEP, WPA) IP as.gnada por DHCP. Esperando cuiexión : (ascYChandO "!1Xke15l. r1 Conexión estatl4ecida (OCI.Joando un "sockat"). FlecibtMdo dalos fuente inalámbrica.. Envío datos serial.. n. J,_.::,,,!. Terminando co,exJón (ib«ando "soclc.elj. Figura 22 Administración de la Red. 37.
(36) 3.2.2 Infraestructura inalámbrica.. Para resolver el problema en el caso que nos encontremos con un ambiente donde ya exista una arquitectura definida con la gran mayoría de sus servicios ya establecidos, donde resulte difícil cubrir todos los puntos necesarios de forma alambrada, se pensó entonces en diseñar una infraestructura que aprovechara las bondades de la red Wi-Fi. Se distribuirían entonces módulos Rabbit secundarios para cubrir las zonas de dificil acceso o aquellas donde se maltrate la estética del lugar para hacer llegar los cables. Se ha preparado entonces una infraestructura inalámbrica que cuente con vanos módulos Rabbit secundarios o esclavos que también sean clientes del módulo Rabbit maestro o principal, este último es el encargado de concentrar todas las instrucciones y todas las conexiones y ser el único que mantenga contacto con las aplicaciones de los usuanos. Para cubrir todas las necesidades se dividirán por sectores las a áreas a cubrir con el servicio, contando con un módulo Rabbit esclavo en cada sección que sea el encargado de distribuir las instrucciones a los actuadores que tenga directamente conectados. La sectorización puede llevarse desde el punto en que sólo se divida el hogar en dos partes, hasta el límite de un módulo inalámbrico a cada esclavo. El esquema de la Figura 23 muestra una posible distribución de módulos inalámbricos para cubrir las necesidades de automatización de lugar.. ·- ..... ... ,_...,.. ~~-.. . y ~. - --· -... -. --~~....,._.,_~~-- ~"'""'y. . . . . ~ - , . , .. . .. -. -. -. -. " " "-. .__,. 1. l • .r. ll. I. f t. 7. 1. '. Í. o. I. ! /. í. - : 1 :t :. : ~- -::,: :. ::-·-:c::=:::::::::i-~ : : : :t :;. Figura 23 Infraestructura inalámbrica. 38. i :1 : ~.
(37) 3.3 Configuración y comunicación RS-485. El siguiente diagrama en la Figura 24, muestra el funcionamiento general de todo el sistema modular. En primer lugar se recibe vía inalámbrica "Wi-Fi", por el módulo "Rabbit" y éste se comunica de forma serial asíncrona con el microcontrolador maestro. El microcontrolador maestro se comunica vía serial asíncrona, pasándose las tramas por un convertidor USART a RS-485 , con los demás microcontroladores esclavos, para que estos realicen la tarea con las que fueron programados.. Funcionamiento modular del Sistema. Modulo Wi-FI. Comunicació Serial. Microcontrolador Maetro. ~. ~. Conversión USART a RS-485. ~ U. Conversión RS-485 a USART. Módulos esclavos. Cada modulo realiza una acción en especifico Figura 24 Funcionamiento del sistema. 39.
(38) 3.3.1 Configuración módulo maestro. Cómo módulo maestro se utilizó un microcontrolador A VR Atmel, Atmega 162, para la configuración en modo maestro lo primero que se tiene que definir es la velocidad o el "Baud-Rate" a la que se desea transmitir y esto se logra escribiendo los parámetros en el registro "UBRR" tomando en cuenta la siguiente fórmula: s.n.:v. fose 16(VBRR • 1>. En donde fose es la frecuencia del oscilador del sistema, UBRR es el contenido de los registros UBRRH y UBRRL, en donde estos puede tomar un valor entre O y 4095 y BAUD que es el "Baud-Rate" y que esta dado en bits por segundo.. En los registros UBRRH y UBRRL, que es un registro de 16 bits en el cual los bits del O al 7 pertenecen al registro UBRRH y del 7 al 16 pertenecen al registro UBRRL mostrado en la Figura 25, son los registros los cuales se modifican para tener la velocidad deseada tienen los siguientes campos.. 15. 1.:.. 13. 12. 11. 1 URSEL. 10. 9. 8. UBRR[11:8). UBRRH. UBRR[7:0] 7. 6. 5. 4. 3. UBRRL 2. o. Figura 25 Registros UBRRH y UBRRL. Bit 15 - URSEL: Register Select. Con este bit se bit se puede seleccionar el acceso entre los registros UBRRH o UCSRC.. Bit 14:12- Reserved Bits. Estos bits están reservados para uso futuro para compatibilidad con futuros dispositivos, por lo que por el momento estos bits son de solo lectura, por lo que no influyen en la generación del el "Baud-Rate".. 40.
(39) Bit 11:0- UBRRI 1:O: USART Baud Rate Register. Estos 12-bits del registro son los cuales controlan la velocidad USART, el registro UBRRH contiene los 4 bits mas significativos y el UBRRL contiene los 8 bits menos significativos de la velocidad USART. En la Tabla 1 se muestra, con un fose =8 MHz que es el utilizado en nuestro sistema, los diferentes "Baud-Rate" que se pueden lograr, con sus respectivos porcentajes de error que tienen estos en la comunicación serial. Tabla I Tabla de Baud-Rate f_, = 8.0000 MHz. B11ud. U2X = 1. U2X= O. Rata (bps). UBRR. Error. UBRR. Error. 2400. 207. 0.2%. 416. ·0.1%. 4800. 103. 0.2%. 207. 02%. 9600. 51. 0.2%. 103. 0.2%. 14.4k. 34. ·0.8%. 68. 06%. 19.2k. 25. 0.2%. 51. 02%. 1 1. 28.Bk. 16. 2.1%. 34. ·O 8~1ó. 1. 38.4k. 12. 0.2%. 25. 0.2%. ! 57.6k. B. -35%. 16. 21%. 76.Bk. 6. -7.0~1ó. 12. 02%. 115 2k. 3. 8.5%. B. ,J.5%. 1. 1. 1. 1. 230.4k. 8.5%. 3. 85¾. 250k. 0.0%. 3. 00%. 1. 1. 1. o. 0.5M. ~~X. 0.0%. 00% O. 111. 0.0% 1 Mbps. 0.5 Mbps. Como segundo paso se tiene que configurar el tipo de trama, es decir cuantos bits contendrá esta, y cuales serán de datos y cuales serán de paridad que se va a transmitir, y activar transmisión o recepción serial; esto se logra configurando el registro UCSRB mostrado en la Figura 26, que tiene los siguiente campos, de los cuales solo nos interesaran los primeros 5, del bit O al bit 4: 7. 6. 5. 4. 3. 2. RXCIE. TXCIE. UDRIE. RXEN. TXEN. UCSZ2. Figura 26 Registro UCSRB. Bit 4 - RXEN: Receiver Enable 41. o RXB8. TXBB. UCSRB.
(40) La opción de recepción se activara escribiendo este bit en uno, lo que activara a el PIN Rxd, en su fom1a de recepción serial.. Bit 3 - TXEN: Transmitter Enable La opción de transmisión se activara escribiendo este bit en uno, lo que activara a el PIN Txd, en su forma de transmisión serial.. Bit 2 - UCSZ2: Character Size El bit UCSZ2 combinado con el bit UCSZ l :O en el registro UCSRC, configura el número de bits de datos de la trama, es decir el tamaño de esta.. Bit l - RXB8: Receive Data Bit 8 RXB8 es el noveno bit de datos, en una recepción serial en la cual esta activada la forma de nueve bits de datos.. Bit O - TXB8: Transmit Data Bit 8 TXB8 es el noveno bit de datos, en una transmisión serial en la cual esta activada la forma de nueve bits de datos.. 7. 6. 5. URSEL. UMSEL. UPM1. 4. 3. 2. UPMO. uses. UCSZ1. O UCSZO. UCPOL. UCSRC. Figura 27 Registro UCSRC. Como tercer y último paso se configura el registro UCSRC mostrado en la Figura 27, en el cual se tiene el tipo de comunicación, síncrona o asíncrona, paridad, y bits de paro; y contiene los siguientes campos: Bit 7 - URSEL: Register Select Este bit selecciona el acceso a los registros UCSRC o UBRRH.. 42.
(41) Bit 6 - UMSEL: USART Mode Select Tabla 2 Con este bit se selecciona el tipo de comunicación, síncrona o asíncrona. Tabla 2 Tipo de comunicación. UMSEL. Modo Operación asíncrona Operación síncrona. o l. Bit 5:4 - UPM l :O: Parity Mode Tabla 3 Estos bits habilitan el tipo de paridad y el chequeo de esta, si se encuentra activada el transmisor automáticamente generara y mandara la paridad en con los bits de datos en cada trama. Tabla 3 Tipo de paridad. UPMl. UPM2. o o. o. Modo de paridad Desactivada Reservado Activado, paridad impar Activado paridad par. l. o. l l. 1. Bit 3 - USBS: Stop Bit Select Tabla 4 Este bit selecciona el número de bits de paro que serán mandados por el transmisor. Tabla 4 Bits de paro. USBS. Bits de paro 1 Bit 2 Bits. o 1. Bit 2: I - UCSZ 1:O: Character Size (Tabla 5) Los bits UCSZ I :O combinados con los bits de UCSZ2 en el registro UCSRB configuran el número de bits de dato usado en las tramas. Tabla 5 Tamaño de trama. UCSZ2. UCSZI. o o o. o o I. ucszo o I. o 43. Tamaño 5 bits 6 bits 7 bits.
(42) o. 1. 1. 1 l. o o. o. 1. 1. o. l. l. l. 8 bits Reservado Reservado Reservado 9 bits. 1. Bit O- UCPOL: Clock Polarity Este bit solo es usado en comunicación síncrona; para comunicación asíncrona entonces se deberá escribir un cero en este bit. De esta forma queda configurado el modo maestro, para la transmisión que nosotros utilizamos, fue una configuración a 9600 bauds, 8 bits de dato, 1 bit de paridad y modo asíncrono; en la Figura 28 se muestra un ejemplo de cómo se configura.. Priner Trama enviada. B1t que! indica que e~ una d1recci:in lo que se trcnsm1t~. ·1 • d1recc ón. "O" dato. lfüt·71Bit61Bit S. IBiH. 1Bit·: 1Bit 21 Bil·t. I. Bil-01. Bits de d1remón de esdav:i. Segunda Tana ~n,·íac!.a. Bit-7. Bit-6. Bit-5. Bit-4. Eit-3. Bit-2. Acción é reali;ar poi los esclavcs. Figura 28 Envío de tramas. 44. Bit-1. Bit-O.
(43) 3.3.2 Configuración esclavo. La configuración de esclavo se lleva acabo de la misma manera que en el maestro (velocidad, paridad, tamaño de trama, etc.), bajo los mismos registros y las mismas especificaciones, por lo que la diferencia entre estos y el maestro de lleva acabo en la recepción, y esto se hace por puro software; la forma de recepción se explica en el diagrama de la Figura 29.. 1. Recepción en esclavo. Esclavo c o ~ dalo 111cibido con 5U di"ecc:ión :. / '/. '. /. ''. '. 1. / ' .''' /' i. Se prende bandera pera. recepdcln de !leQUnda trama. ! !. ,r. '. /. JJ. /. ,' '. 1. I. i ,'. e'. /. .,/. ! ''. 1·. Se realiza la acción !. 1. ..!,_J. 1,. '-. \ ... Figura 29 Recepción de esclavo. 45. ].
(44) 3.3.3 Forma ele comunicación. La base de la comunicación modular de nuestro sistema se lleva acabó en 4 pasos que se muestran en la figura 30.. Rilblllt. Milestro. MA)(485. <. Bus ;485 MAX485. =>. Figura 30 Comunicación RS-485. l. El maestro envía las tramas de forma USART (TTL). 2. Se tiene un módulo (MAX485), que convierte de forma USART (TTL), a una forma RS-485. 3. Se transmite a todo el bus RS-485, en donde están conectados todos los esclavos, y todos tienen un módulo (MAX485) que convierte de RS4. 485 a USART (TTL). 5. Con las tramas ya en USART (TTL), llega a cada esclavo.. 46.
(45) 3.4 Actuador de Luz ON/OFF Luz on-off, este actuador es relativamente sencillo de usar, ya que solo cuenta con dos estados, activado o apagado, y su funcionamiento es el siguiente:. J. Luz on-off. J. jJ El maestro envía petición para prender la luz. jJ Se activa un switch hasta que se de la. orden de apagar la luz. jJ Se espera para nueva orden. Figura 31 Diagrame del Actuador de Luz. Se tiene conectado a foco un modulo esclavo, que como se ha mencionado con anterioridad, que recibe órdenes de el modulo maestro, cuando este modulo esclavo recibe la orden de prender la luz, entonces activa un interruptor (como lo muestra el siguiente circuito), que permite el paso de corriente alterna a el foco y después de un tiempo cuando recibe la orden de apagar la luz entonces desactiva el interruptor, que corta el paso de corriente alterna a el foco, y esto funciona de igual manera de forma constante. El interruptor que se utilizó es un optotriac, que se activa mediante un microcontrolador, y este optotriac cuando es activado, también activa un tirac, que este es el encargado de dejar pasar la corriente por el dispositivo deseado, en este caso la contra chapa electrónica.. Tecnológico de MonterrJ7. ~ Oudad de México 1. Rihlinh:ar~.
(46) Foco. (<:")\ ------\ u 1-------.. +. Linea AC. Tnac Optotriac. M1cro-controlador Figura 32 Circuito del Actuador de Luz. 3.5 Actuador de chapa eléctrica.. Contrachapa electrónica, es un dispositivo eléctrico que sirve para permitir o negar el abierto o cierre de puertas y tiene las siguientes características: Estructura estándar de acero inoxidable. Se alimenta con 9-12 Yac. Consumo corriente 450mA. Fuerza de presión: 800Kg. Temperatura de superficie: Alrededor de 20ºC Temperatura de operación: -1 OºC a 25ºC Función NC (Normalmente cerrado). Función de seguridad: Supresor de picos de voltaje Modo de apertura: Oscilación de puerta de 90 grados Adecuado para: puertas de madera, metálicas, contra incendio. Peso neto: 0.4 kg. Medidas: l 50L x 39.5W x 28H (mm). El funcionamiento de este dispositivo es el siguiente:. 48.
(47) Contrachapa electrónica Se detecta que se necesita abrir la puerta. ll Se activa el dispositivo dejando pasar corriente alterna por no mas de ocho segundos.. ll Se cierra el paso de corriente. Figura 33 Diagrama del Actuador de la Chapa eléctrica. Se tiene conectado a la contrachapa un módulo esclavo, que como se ha mencionado con anterioridad, que recibe órdenes del módulo maestro, cuando este modulo esclavo recibe la orden de abrir la contrachapa electrónica, entonces activa un interruptor (como lo muestra el siguiente circuito), que permite el paso de corriente alterna a la contrachapa (por no más de 8 s.), y es así como realiza su funcionamiento de abrir la contrachapa. El interruptor que se utilizó es un optotriac, que se activa mediante un microcontrolador, y este optotriac cuando es activado, también activa un triac, que este es el encargado de dejar pasar la corriente por el dispositivo deseado, en este caso la contra chapa electrónica.. 49.
(48) Contra chapa. Transformador. Cptotriac. M1cro-controtador. Figura 34 Circuito del Actuador de la chapa eléctrica. 3.6 Actuador Ventilador de 4 Estados.. Este actuador entra en funcionamiento a partir de corriente alterna, teniendo para la variación de velocidades, una conmutación de capacitancia, provocando con lo anterior, un aumento o disminución de potencia con lo cual el motor aumenta o disminuye su velocidad.. Switches de Dirección. 1. Motor. 1. Switch de capacitores 1. 4. 2. 3. Figura 33 Esquema general de íuncionamiento de Ventilador. 50.
(49) La variación de potencia se debe al comportamiento que tienen los capacitares al paso de corriente alterna, y dependiendo de los valores del capacitar y de frecuencia de la corriente, se ajusta el valor de la llamada resistencia del capacitar, llamada la "reactancia capacitiva". Esta resistencia que presenta el capacitar al paso de la corriente provoca un desfasamiento con respecto al voltaje que pasa por el mismo.. Voltaje / / --~~\. //. //. 1 I. íI // //. I. \\ .. Cornente. .. //. i I. \. \. \ \. \\ \\. .. '\ \,. '. "\\\\ ','' \. .~'"~/· ',/. Figura 34 Retraso de Corriente con respecto al Voltaje.. Sabiendo que la potencia se calcula como P=V*I, el resultado entre un desfasamiento mayor produce un valor distinto de potencia, y por lo tanto, que el motor del ventilador gire a una velocidad distinta.. Potencia. ., Figura 35 Gráfica de Potencia con respecto a un condensador. Para calcular la potencia que recae en el motor se tiene el siguiente análisis:. • Se calcula la reactancia capacitiva con la formula 51.
(50) 1 Xc. = 2rrfC. donde fes la frecuencia de la corriente (60 Hz) y Ces el valor del capacitar. •. Una vez calculada la reactancia se utiliza la "Ley de Ohm", junto con la formula de potencia.. V= I * Xc. p. = v2 * Xc. Los valores de capacitares que tiene el circuito es de lu y 2u y el circuito del ventilador es el siguiente: 1u. ". s~~,h1. 1 2u. I /. 1. Motor. 1. sw1tch . 3. Switch 2 +. Linea 120V 60Hz. Figura 35 Circuito de conmutación de ventilador. La siguiente tabla muestra como resultan las combinaciones de la conmutación de capacitares:. 52.
(51) Estado. S1. S2. S3. Capacitancia. Velocidad. ON. ON. OF,F. 3uF. Circuito 1u. o. Switch 1. e~ ~~·i. (apagado). Switch2. Un~ 120V 601-tz. Velocidad 1. ON. OFF. ON. ./. 1u. luF. C,. 2u. Sw ilch 1. "Switch 2. Linea 120V 601-tz. Velocidad. OFF. ON. ON. 2uF. 1u. C'. 2. 2u. Velocidad. ON. ON. ON. "'. Switch 1. Switch 2. Linea 120V 60Hz. ,..,..,... -- 3uF. 3. 1u. e. Switch 1. Switch 3 2u. Switch 2 +. Linea 120V 60Hz. Tabla 6 Comparativo de circuito de conmutación. 53. ..r.
Figure

+7




Documento similar
En estos últimos años, he tenido el privilegio, durante varias prolongadas visitas al extranjero, de hacer investigaciones sobre el teatro, y muchas veces he tenido la ocasión
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
6 Para la pervivencia de la tradición clásica y la mitología en la poesía machadiana, véase: Lasso de la Vega, José, “El mito clásico en la literatura española
En cuarto lugar, se establecen unos medios para la actuación de re- fuerzo de la Cohesión (conducción y coordinación de las políticas eco- nómicas nacionales, políticas y acciones
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
