Estudio de esquemas de control para plataforma de tres grados de libertad mediante retroalimentación dinámica
102
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Estudio de esquemas de control para Plataforma de tres Grados de Libertad mediante retroalimentación dinámica.. Autor: Eduardo Andrés Román Duarte Email: [email protected] Tutor: M.Sc. Eduardo Izaguirre Castellanos Email: [email protected]. Santa Clara 2009 "Año del 50 Aniversario del Triunfo de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Cuando en el mundo nace un verdadero genio es muy fácil reconocerle, pues todos los necios se conjuran contra el. Jonathan Swift.
(5) ii. DEDICATORIA. A mi Bebé por ser lo más ¨pequeño¨ y los más grande que me ha dado la vida. A mi Madre, pues a ella le debo la vida, todo lo que soy y seré. A mi Abuelo, por estar siempre que lo necesité y ayudarme a encontrar el camino correcto en cada paso que dí. A mi Esposa por ser mi compañera en cada batalla que libré. A mi Hermana por todo su amor y su apoyo incondicional. A mi Sobrinito por confiar siempre en mí..
(6) iii. AGRADECIMIENTOS. A Pedro por toda su ayuda y sus consejos, que me fueron de gran ayuda. A mi tío por estar siempre presente.. A toda mi familia por darme todo su apoyo durante toda mi vida como estudiante.. A Belkis, Jorge y Rosa por su ayuda en estos últimos años.. A mis compañeros de batalla, en estos largos, ¨ pero cortos ¨ 5 años. A Orlando, Valeriano, Lisdan, Pablo, Odelvis y todos mis amigos de siempre y para siempre.. Agradezco especialmente a mi tutor por dedicarle tanto tiempo y empeño a este trabajo que sin dudas es tan del como mío y por todas sus enseñanzas que nunca las olvidaré..
(7) iv. TAREA TÉCNICA. 1. Revisión bibliográfica del tema de esquemas de control aplicados en Robots Paralelos. 2. Revisión bibliográfica acerca del empleo de unidades inerciales de medición en Robots Paralelos. 3. Estudio del sistema electro-neumático válvula-pistón. 4. Estudio del modelo matemático dinámico aproximado del sistema robótico como base para ser empleado en el esquema de control. 5. Estudio del modelo en ADAMS de la Plataforma. 6. Confección. del. esquema. de. control. del. sistema,. considerando. retroalimentación de los valores de posición, velocidad y aceleración del efector final. 7. Co-simulación con el Matlab y ADAMS del sistema de control. 8. Análisis de los resultados. 9. Redacción del informe Final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN El interés por el estudio de los robots paralelos principalmente el caso de las plataformas de simulación se ha venido incrementando aceleradamente en los últimos años. Además ocupa en la actualidad un papel preponderante en el proceso de modernización e innovación de las industrias. En este trabajo se presenta una propuesta del esquema de control a emplear para gobernar una plataforma de 3 grados de libertad, diseñada como simulador de. movimiento,. accionada. por. cilindros. neumáticos. de. doble. efecto,. considerando la retroalimentación de los valores de posición, velocidad y aceleración del efector final. Primeramente se realizó un análisis sobre los esquemas de control más empleados en robots paralelos. Se expone un estudio del modelo analítico matemático del sistema electro-neumático, además se presentan las principales características de funcionamiento y especificaciones técnicas de la Unidad Inercial de Medición (IMU) que será empleada como sensor básico para conocer la orientación de la plataforma móvil. Por último se presentan los esquemas de control propuestos para el control de la plataforma objeto de estudio y se realiza la co-simulación de estos, para ello se emplean el Simulink/Matlab como software básico para implementar el esquema de control y el ADAMS para simular los movimientos y realizar las mediciones de las variables de interés para control..
(9) vi Tabla de Contenido. PENSAMIENTO..................................................................................................... i DEDICATORIA ..................................................................................................... ii AGRADECIMIENTOS.......................................................................................... iii TAREA TÉCNICA ................................................................................................ iv RESUMEN ............................................................................................................ v INTRODUCCIÓN ..................................................................................................1 CAPĺTULO 1: FUNDAMENTOS TEÓRICOS........................................................6 1.1. Introducción ............................................................................................6. 1.2 Esquemas de control...................................................................................8 1.2.1 Control clásico PID ...............................................................................9 1.2.2 Control por modelo dinámico .............................................................13 1.2.3 Control Adaptativo ..............................................................................20 1.2.4 Esquemas de control lineales en cascada..........................................23 1.2.5 Control por Modo Deslizante ..............................................................25 1.2.6 Control Predictivo ...............................................................................26 1.2.7 Otras técnicas de control ....................................................................28 CAPĺTULO 2: SISTEMA ELECTRO-NEUMÁTICO ............................................31 2.1 Introducción...............................................................................................31 2.2 Importancia del modelo analítico del sistema electro-neumático .............32 2.3 Sistema electro-neumático .......................................................................32 2.3.1 Funcionamiento del sistema válvula-pistón ......................................33 2.4 Modelo matemático analítico....................................................................35 2.5 Descripción de la identificación experimental...........................................38 CAPĺTULO 3: UNIDADES INERCIALES DE MEDICIÓN....................................41.
(10) vii 3.1 Introducción...............................................................................................41 3.2 Aplicaciones ..............................................................................................42 3.3 Empleo de la IMU en la Robótica Paralela ................................................43 3.4 Limitaciones ..............................................................................................44 3.5 Clasificación de errores ............................................................................45 3.6 Calibración ................................................................................................45 3.7 Estabilidad en la medición.........................................................................46 3.8 Método de muestreo .................................................................................46 3.9 Cadenas de salida.....................................................................................47 3.10 Driver de la IMU ......................................................................................48 3.11 Características de la MTi.........................................................................48 3.11.1 Principales datos de la MTi..............................................................49 3.11.2 Señales de salida .............................................................................50 3.11.3 Dimensiones .....................................................................................50 CAPĺTULO 4: ESQUEMAS DE CONTROL Y SIMULACIÓN.............................51 4.1 Introducción...............................................................................................51 4.2 Importancia de la simulación .....................................................................51 4.3 Herramientas de software .........................................................................52 4.3.1 Matlab .................................................................................................52 4.3.2 Simulink ..............................................................................................53 4.3.3 ADAMS ...............................................................................................54 4.4 Descripción de la plataforma objeto de estudio.........................................55 4.5 Herramientas matemáticas.......................................................................57 4.5.1 Modelo cinemático inverso .................................................................57 4.5.2 Cinemática diferencial.........................................................................59 4.5.3 Modelo dinámico.................................................................................60.
(11) viii 4.6 Esquemas de control.................................................................................61 4.6.1 Esquema de control por modelo dinámico..........................................62 4.6.2 Esquema de control mediante cinemática inversa..............................65 4.7 Análisis Económico ...................................................................................72 CONCLUSIONES Y RECOMENDACIONES ......................................................73 Conclusiones...................................................................................................73 Recomendaciones...........................................................................................74 REFERENCIAS BIBLIOGRÁFICAS....................................................................75 Anexos................................................................................................................82 Anexo I Datos del pistón ................................................................................82 Anexo II Datos de la Válvula ..........................................................................84 Anexo III Especificaciones técnicas y parámetros de la MTi ..........................85 Anexo IV Modelo en Simulink de las ecuaciones de cinemática inversa .......86 Anexo V Modelo en Simulink de las ecuaciones de cinemática diferencial....87 Anexo VI Plataforma en ADAMS....................................................................88 Anexo VII. Esquema de control por cinemática inversa implementado en. Simulink...........................................................................................................89 Anexo VIII Subsistemas en Matlab que conforman el controlador ................90.
(12) Introducción. 1. INTRODUCCIÓN El campo de la robótica, en relación con el tipo de cadena cinemática abarca dos grandes líneas, la correspondiente a los robots serie, y la que tiene que ver con los robots paralelos. En los últimos años los robots paralelos han marcado mucho interés en la comunidad científica. Estos robots por lo general se caracterizan por poseer elevadas prestaciones en términos de alta velocidad, precisión de movimiento, excelente relación peso-carga, rigidez mecánica, pequeños errores de posicionamiento, etc. En el comportamiento de estos mecanismos juegan un papel fundamental la implementación de adecuados algoritmos y esquemas de control, pues tienen como objetivo explotar al máximo las características de velocidad y precisión que distingue a las máquinas cinemáticas paralelas (Parallel Kinematics Machine), como también se les conoce (Wobbe et al., 2008, Merlet, 2006, Tsai, 1999). Un robot de cinemática paralela, también llamado robot de cadena cerrada o manipulador paralelo, consiste básicamente en una plataforma móvil unida a una base fija por medio de varios brazos, típicamente las extremidades actuadas puede estar gobernada por uno o más actuadores (Aracil et al., 2006). El primer diseño de un robot de cinemática paralela data de 1962, cuando Gough propuso un manipulador paralelo como máquina para el control de calidad de neumáticos. Dos años después, Stewart (1965) diseñó una plataforma paralela para simulador de vuelo. El mecanismo de Stewart, consistía en una plataforma triangular unida mediante articulaciones esféricas a los actuadores lineales ajustables en longitud, que se conectaban a su vez, a una base fija mediante articulaciones universales (López, 2008). Desde entonces muchos investigadores han estudiado el tema y han propuesto nuevos diseños. Algunos de ellos han sido industrializados con gran éxito como por ejemplo la plataforma de Stewart- Gough, el robot Delta, etc. (Limón, 2006).
(13) Introducción. 2. Estos dispositivos han servido por excelencia para el estudio y aplicación de numerosas técnicas de control. En este sentido, cabe mencionar aplicaciones que abarcan desde el control clásico PID (Silva, 2005, Lee et al., 2004), pasando por el control adaptativo (Giraldo, 2007, Huh and Bien, 2007), control robusto (Cheah et al., 2006, Pietsch et al., 2005, Bing and Yan, 2007, Fraisse et al., 2007), control por modo deslizante (Yagiz and Hacioglu, 2005, Yang et al., 2008, Winston García-Gabín and Zambrano, 2004, Lee et al., 2004), control predictivo (Alba, 2002, Vivas and Poignet, 2006), control por lógica difusa (Yagiz and Hacioglu, 2005, F. Qiao et al., 2003, Hung and Chung, 2006), control neuronal (Gutierrez, 2003, Rong-Jong and Po-Chen, 2006), entre otros. Tradicionalmente el control de los robots se basaba en el control independiente de las articulaciones. Esto supondría ver las interacciones entre las mismas como defectos del modelo o como meras perturbaciones. La idea es suponer que las ecuaciones dinámicas del robot están desacopladas y ver cada articulación como si se tratara de un sistema dinámico SISO independiente de las demás. Encontrar el control más eficiente para estos mecanismos es una de las tareas más importantes en la robótica moderna. En el caso del control por modelo dinámico se debe procurar que las trayectorias sean seguidas fielmente por el robot. Para este fin es necesario conocer las ecuaciones dinámicas del robot y las herramientas de diseño aportadas por la teoría de control. Estos modelos dinámicos son fuertemente no lineales lo que hace que el procedimiento de diseño para este tipo de sistemas sea muy complejo aunque en la práctica se realizan simplificaciones para facilitar el mismo, pero afectando ciertas características de movimiento del robot. El uso de técnicas más robustas puede mejorar. esta. problemática,. considerablemente.. aunque. el. costo. computacional. aumenta.
(14) Introducción. 3. En este trabajo se pretende realizar el estudio de los esquemas de control para la plataforma de 3 grados de libertad marca SIMPRO, accionada por cilindros neumáticos de doble efecto, considerando retroalimentar dinámicamente la orientación del efector final, a partir de medir los valores de la pose de la plataforma móvil, empleando una Unidad Inercial de Medición (IMU), para posteriormente proponer un adecuado esquema de control que permita dar seguimiento a la trayectoria generada por el mundo virtual. Esta investigación se ha visto motivada debido primeramente al interés por aportar nuevos conocimientos sobre este tema ya que este se ha venido incrementando en los últimos años, específicamente en la Universidad Central de las Villas, donde en diciembre de 2005 se firma el primer convenio de colaboración con el Centro de Investigación y Desarrollo de Simuladores “CIDSIM” a partir de identificarse entre ambos centros objetivos de trabajo de beneficio e interés mutuo. Este convenio fomentó en Cuba el desarrollo en las investigaciones y aplicaciones de estructuras robóticas paralelas, siendo en estos momentos el Grupo de Investigaciones de Robótica y Percepción del Departamento de Automática y Sistemas Computacionales de nuestro centro uno de los que mayor número de investigaciones tiene reportadas sobre el tema en nuestro país. Además se debe a que aunque la mayor parte de los robots o manipuladores industriales, que en la actualidad se utilizan, se basan esencialmente en brazos articulados con estructura serie, en los últimos años ha aumentado el uso de mecanismos con estructuras paralelas debido a las ventajas que ofrecen con relación a los robots serie, tales como: 1. Los accionamientos de potencia conectan directamente la base del robot al efector final. Debido a esto, los mismos sirven como elementos estructurales y actuadores del robot de manera.
(15) Introducción. 4. simultánea, lo que le da la capacidad al sistema robótico de manipular cargas muy superiores a su propio peso. 2. Las estructuras paralelas son mecanismos que ofrecen una alta rigidez y un relativo bajo peso. Por demás el error de las articulaciones no es acumulativo. Esto hace que presenten unas características en cuanto a precisión claramente superiores a las de los robots serie.. 3. Presentan elevadas velocidades de operación, en comparación con otros tipos de estructuras robóticas.. Tomando como referencia los aspectos a tratar en este trabajo se plantean los siguientes objetivos: 1. Propuesta de esquema de control para plataforma de 3 grados de libertad accionada por cilindros neumáticos, empleando una IMU como sensor para conocer la orientación de la plataforma móvil. 2. Estudio de las características y potencialidades de las IMU para ser empleada en la medición de los parámetros: posición, velocidad y aceleración del efector final. 3. Simulación del comportamiento del sistema. Este trabajo se ha estructurado en 4 capítulos, el capítulo 1 está enfocado al estudio y análisis de esquemas más comunes de control de robots paralelos, haciendo hincapié en los accionados por actuadores neumáticos. En el capítulo 2 se dedica al modelado del sistema electro-neumático, en el cual se realiza un estudio del modelo analítico matemático del sistema. En el capítulo 3 se aborda.
(16) Introducción. 5. el tema de las unidades inerciales de medición, su empleo, así como aplicaciones en general, sobre todo en robótica paralela.. En el capítulo 4. primeramente se propone el esquema de control a emplear para gobernar la Plataforma objeto de estudio, y finalmente se realiza la co-simulación en Matlab y ADAMS de la plataforma valorando su comportamiento y factibilidad de implementación..
(17) Capítulo 1: Fundamentos Teóricos. 6. CAPĺTULO 1: FUNDAMENTOS TEÓRICOS 1.1 Introducción. El control de los robots paralelos es todavía un campo abierto. A pesar de que el control de estos ha sido estudiado en numerosos trabajos, la dificultad es tal, que aún queda mucho por hacer. Para reducir el efecto de las perturbaciones externas y que la señal de control sea robusta frente a errores de modelado, el controlador debe considerar términos de realimentación de posición, velocidad y aceleración del elemento terminal. La dificultad de realizar el control proviene del hecho de que el robot objeto de estudio es un sistema multicuerpo, no lineal, acoplado y con parámetros inerciales variables en el tiempo, esto principalmente se debe a variaciones de la carga soportada. El sistema de control de este robot paralelo está compuesto por varios módulos: los actuadores, los sensores, el controlador, el planificador de trayectorias (mundo virtual), etc. Los actuadores son los encargados de accionar cada una de las articulaciones con el fin de posicionar y orientar el efector final. Estos pueden ser de tipo eléctrico, neumático o hidráulico. Los sensores por su parte, son los encargados de medir las variables de interés para el control del robot, y fundamentalmente de acuerdo a la información que se obtiene de los mismos, se pueden agrupar en dos tipos: los que brindan la información de las variables articulares del robot (por ejemplo: sensores de posición, velocidad, fuerza), y los que brindan información de la posición y orientación del elemento terminal en el espacio de trabajo del robot, (por ejemplo: cámaras, sensores de ultrasonidos, sensores inerciales, acelerómetros, etc..
(18) Capítulo 1: Fundamentos Teóricos. 7. El controlador recibe las consignas de referencia de las variables asociadas a la trayectoria del efector final, y que son generadas por el sistema de planificación de trayectorias. De acuerdo a la información entregada por los sensores, se establecen las acciones de control (ya sea articular o en el espacio de trabajo) adecuadas para cada actuador según el algoritmo de control implementado (Silva, 2005). Cabe mencionar que la elección de la estrategia de control no es el único factor a tener en cuenta para garantizar un buen funcionamiento del sistema de control y para demostrarlo antes expuesto se presenta en la tabla 1 algunos aspectos que influyen de manera satisfactoria en el éxito de un determinado algoritmo de control (Silva, 2005). Tabla 1.1. Factores que influyen en el buen desempeño de un sistema de control.. Aspectos que influyen positivamente. %. Selección de la estrategia de control. 14%. Selección del esquema de control. 12%. Especificaciones apropiadas. 10%. Configuración flexible del sistema. 10%. Operación de emergencia. 10%. Interfaz. 8%. Análisis de proceso. 8%. Mientras que en la tabla 2 se muestran los que afectan de manera negativa el comportamiento de un determinado algoritmo de control..
(19) Capítulo 1: Fundamentos Teóricos. 8. Tabla 1.2. Factores que influyen de manera negativa en el desempeño de un sistema de control.. Aspectos que influyen negativamente. %. Ausencia de análisis del proceso. Inexactitud del modelo. 21%. Selección de los sensores. 14%. Falta de rechazo a las perturbaciones. 10%. Selección de la estrategia de control. 7%. Selección de los actuadores. 6%. Selección del esquema de control. 5%. Especificaciones inapropiadas. 5%. Configuración rígida del sistema. 5%. En este capítulo presenta un estudio de los distintos esquemas de control reportados en la literatura especializada, así como las estrategias de control implementadas en estos para cada caso en particular. 1.2 Esquemas de control En la formulación del problema de control hay que considerar entre otros aspectos el correcto modelo matemático del sistema, el cual en el caso de los robots paralelos puede tener incertidumbres dinámicas no modeladas, variaciones de los parámetros, etc. Entonces el lazo de control debe ser diseñado de manera tal que satisfaga las especificaciones de comportamiento del sistema a pesar de las incertidumbres del modelo y no linealidades del sistema. En tal sentido el control de robots paralelos ha despertado un gran interés y motivación por parte los investigadores, por lo que en los últimos años,.
(20) Capítulo 1: Fundamentos Teóricos. 9. diferentes tipos de estrategias y esquemas de control han sido estudiados e implementados para gobernar estructuras robóticas paralelas. A continuación se procede a realizar un estudio de las principales estrategias y esquemas de control que hasta el momento han sido encontradas en la literatura consultada.. 1.2.1 Control clásico PID En el caso de un control clásico PID, como es el de la mayoría de los robots industriales actuales, el mecanismo se trata como un sistema lineal y cada una de las articulaciones se controla individualmente con un regulador de tipo PID de ganancias constantes. Las ventajas de este sistema son: la facilidad de implementación y el bajo costo computacional. Las desventajas son: que la respuesta temporal del robot varía según su configuración, se producen sobreoscilaciones e imprecisión en los movimientos rápidos (Silva, 2005). En la figura 1.1 se muestra un controlador PID en un esquema de control articular.. Figura 1.1. Esquema de control clásico PID..
(21) Capítulo 1: Fundamentos Teóricos. 10. A partir de definir una estrategia de control y utilizando diferentes esquemas del lazo de control se obtienen resultados diferentes. Como ejemplo se puede citar el robot Orthoglide mostrado en la figura 1.2,. una máquina de cinemática. paralela que posee 3 grados de libertad del tipo traslacional donde con un control clásico PID se realizaron. pruebas de simulación. para varias. configuraciones (Paccot et al., 2009).. Figura 1.2. Robot Orthoglide.(Paccot et al., 2009). En las figuras 1.3, 1.4, 1.5 y 1.6 se muestran los distintos esquemas de control implementados para el robot Orthoglide, en los que se parte de mantener un mismo controlador PID y se realizan variaciones en los esquemas de control y en la figura 1.7 se muestra el comportamiento del robot ante el seguimiento a señal de referencia de cada una de las pruebas realizadas.. Figura 1.3. Esquema de control en un solo eje. (Paccot et al., 2009).
(22) Capítulo 1: Fundamentos Teóricos. 11. Figura 1.4. Esquema de control articular. (Paccot et al., 2009). Figura 1.5. Esquema de control cartesiano. (Paccot et al., 2009). Figura 1.6. Esquema de control a partir de la m`edición de los valores del efectorfinal. (Paccot et al., 2009).
(23) Capítulo 1: Fundamentos Teóricos. 12. Figura 1.7. Comparación entre los esquemas. (Paccot et al., 2009). En todos los casos anteriores el autor estudia el comportamiento del robot ante el seguimiento a señal de referencia. Las configuraciones correspondientes a las figuras 1.3, 1.4 y 1.5 presentan un error de seguimiento muy similar, lo cual depende principalmente de la exactitud de la identificación del modelo, contrariamente al esquema que se basa en el empleo de un sistema de visión, cuyo comportamiento depende principalmente de la exactitud del sensor y no del proceso de identificación como tal (Paccot et al., 2009). Estos resultados de la simulación primero demuestran que el control basado en la visión debe permitir la mejor exactitud y no lo hace dependiente de la identificación de la estructura mecánica. De hecho, como las variables del efector-final se miden y no se estiman mediante la cinemática directa, la calidad de la información depende solamente de la exactitud del sensor. La ventaja de una identificación exacta es así menos significativa que la calidad de los sensores y estrategia de control empleada. Al contrario, las otras arquitecturas del control requieren una identificación exacta (Paccot et al., 2009)..
(24) Capítulo 1: Fundamentos Teóricos. 13. 1.2.2 Control por modelo dinámico En los robots paralelos, es necesario resolver el modelo dinámico como premisa para llegar a un control satisfactorio. Un esquema frecuente consiste en utilizar la dinámica inversa para el diseño de un regulador dinámico (Inverse Dynamics Control –IDC-) (Staicu, 2009, Sylvio C. Tartari and Lustosa, 2005, Yen and Lai, 2009). El modelo dinámico inverso permite calcular los pares y/o fuerzas necesarias en cada articulación para seguir una trayectoria deseada. Este cálculo puede realizarse antes del movimiento o durante el movimiento (en tiempo real). En este último caso, debe desarrollarse un modelo con un costo computacional aceptable para que sea realizable en tiempo real. Al aplicar a cada articulación la fuerza calculada, la trayectoria se seguirá sin error si el modelo del robot es exacto y no hay perturbaciones externas significativas. Por otra parte las incertidumbres del modelo influirán en el comportamiento dinámico del sistema y con ello en el resultado final del control del sistema (system performance) (Silva, 2005). Un ejemplo del método IDC se puso en práctica para un robot paralelo de 3 gdl (3-PRC), que consiste en una plataforma móvil, una base fija, y tres miembros con la estructura cinemática idéntica (Xu and Li, 2009), cuya representación esquemática se muestra en la figura 1.8. En la figura 1.9 se muestra. el. diagrama de bloque del esquema de IDC. implementado propuesto por Q. Xu (Xu and Li, 2009)..
(25) Capítulo 1: Fundamentos Teóricos. 14. Figura 1.8. Representación esquemática del robot 3-PRC propuesto por Q. Xu.. Figura 1.9. Esquema de control IDC propuesto por Q.Xu.. Una co-simulación en el prototipo virtual del 3-PRC se llevó a cabo combinando MATLAB/Simulink con ADAMS. Durante la simulación, el algoritmo del control se ejecuta en MATLAB para generar las fuerzas de mando, que después se exportan al ambiente de ADAMS y se aplican a los actuadores del prototipo virtual en cada ciclo de ejecución. Las salidas resultantes del prototipo virtual.
(26) Capítulo 1: Fundamentos Teóricos. 15. (posición y velocidad de la plataforma móvil) son medidas por los “sensores” en ADAMS y después retroalimentadas al regulador en MATLAB para el cálculo de la señal siguiente de mando (Xu and Li, 2009). La demostración de los resultados de la simulación muestra que el IDC da lugar a errores de estado estacionario casi cero. Sin embargo, en aplicaciones reales, la carga útil y los parámetros dinámicos no pueden ser conocidos exactamente y debido a estas incertidumbres lo antes expuesto puede variar. También se puede mencionar el control robusto IDC (RIDC), que cuyo esquema se muestra en la figura 1.10.. Figura 1.10. Variante de Esquema de Control Robusto IDC. (Xu and Li, 2009). Al realizar una comparación del control RIDC con el IDC, se puede concluir que la reducción de los errores del control no es muy obvia y la mejora relativa que presenta conlleva a un aumento considerable del costo computacional. Por lo que el funcionamiento del control robusto diseñado no es claramente superior al regulador por dinámica inversa..
(27) Capítulo 1: Fundamentos Teóricos. 16. Debido a que no se logran mejoras significativas a partir del RIDC se propone el esquema Passivity-based robust control (PBRC) que aparece en la figura 1.11, basado en la simetría de las ecuaciones dinámicas (Xu and Li, 2009).. Figura 1.11. Esquema de Control del PBRC. (Xu and Li, 2009). El proceso de diseño del controlador PBRC es notoriamente simple en comparación con el controlador RIDC. Además, los índices de comportamiento muestran mejores resultados perceptiblemente en comparación a los dos controladores anteriores (Xu and Li, 2009). Para el caso de la plataforma de 6 grados de libertad mostrada en la figura 1.12, se realizó un control del tipo desacoplado, que considera que las articulaciones del robot están desacopladas, de modo que un par en un determinado actuador únicamente. tendrá. efecto,. sobre. el. movimiento. correspondiente (figura 1.13) (Kecskemethy et al., 2008).. de. la. articulación.
(28) Capítulo 1: Fundamentos Teóricos. 17. Figura 1.12. Plataforma paralela del tipo RRPS de 6 extremidades actuadas propuesto por Andrés K.. La ventaja del control desacoplado en este caso radica en que el diseño del regulador para cada articulación puede hacerse utilizando las técnicas más comunes de diseño.. Figura 1.13. Esquema del control de un actuador. (Kecskemethy et al., 2008). En el control desacoplado para cada articulación existe un lazo de control y en el diseño del regulador se considera que dicho actuador no ejerce acción en el resto de las articulaciones del robot. Aunque en ocasiones, la suposición de que el robot paralelo es una serie de eslabones dinámicamente desacoplados, de forma que el movimiento de uno de ellos no afecta a los demás, no siempre.
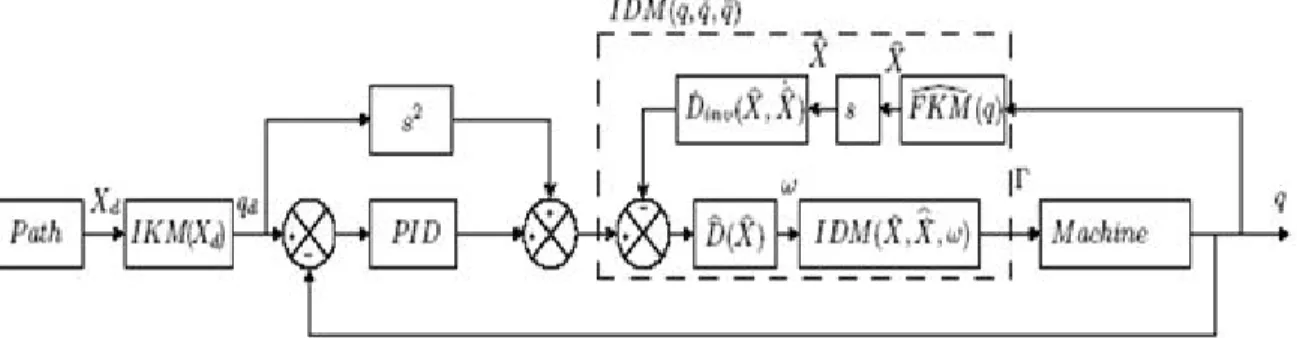
(29) Capítulo 1: Fundamentos Teóricos. 18. brinda buenos resultados a la hora de implementar el control (Kecskemethy et al., 2008). Otro ejemplo de esquema de control desacoplado es el mostrado en la figura 1.14.. Figura 1.14. Control por desacoplamiento no lineal.. Evidentemente, el uso del control por desacoplamiento no lineal supone el cálculo del modelo dinámico en tiempo real, lo cual sería demasiado complejo, sobre todo para aplicaciones en tiempo real (Silva, 2005). En el siguiente esquema (figura 1.15) se presenta un control IDC en el cual es necesario calcular la cinemática directa para obtener los valores de las variables cartesiana a partir de las variables articulares. Este procedimiento puede llevar a una problemática sin solución, derivado del cálculo de la cinemática directa, que debido a su complejidad es prácticamente inutilizable para objetivos de control (Bellakenal et al., 2008). Además la presencia de un lazo de control basado en sensores de fuerza que se suma al lazo basado en control de la posición, puede que no sea práctico en.
(30) Capítulo 1: Fundamentos Teóricos. 19. términos de arquitectura de control, debido a que al estar un modelo numéricamente estimado en el lazo de control puede conducir a un empeoramiento de la estabilidad y de la exactitud, además de un aumento del costo computacional (Bellakenal et al., 2008).. Figura 1.15. Esquema empleando la cinemática directa. (Bellakenal et al., 2008). Para eliminar estos inconvenientes el autor propone substituir el modelo cinemático directo por un sensor que ofrezca directamente el valor medido del efector final de la plataforma en vez de solucionar un sistema de ecuaciones no lineales, corroborando nuestra idea del empleo de una unidad inercial de medición para conocer dinámicamente la orientación de la plataforma móvil del simulador caso de estudio (Bellakenal et al., 2008)..
(31) Capítulo 1: Fundamentos Teóricos. 20. Figura 1.16. Esquema de control sustituyendo la cinemática directa. (Bellakenal et al., 2008). En este esquema del control, las variables de fuerza y de posición se controlan en el espacio de la tarea por medio de dos lazos de control que actúan en paralelo. 1.2.3 Control Adaptativo Como otro tipo de estrategia de control empleada se presenta el caso del control adaptativo con modelo de referencia o MRAC (Model Reference Adaptive Control). La idea fundamental, es forzar al robot a seguir un modelo de referencia lo mejor posible, ello se hace ajustando las ganancias de realimentación del control en función del error entre la respuesta del modelo y la.
(32) Capítulo 1: Fundamentos Teóricos. 21. del sistema real. Este modelo no tiene en cuenta las fuerzas de gravedad y desprecia los efectos no lineales (Silva, 2005). Además, la estabilidad global de este esquema no está siempre garantizada, lo que lo convierte en inutilizable en la práctica. Por esta razón, en lo últimos años se ha implementado esta estrategia introduciendo el uso del modelo dinámico en el esquema de control adaptativo (figura 1.17).. Figura 1.17. Control adaptativo con identificación de los parámetros del modelo. (Silva, 2005). Esta idea consiste en identificar los parámetros del modelo no lineal completo en lugar de un modelo lineal que no refleja la realidad. Cuando la trayectoria es repetitiva, como es a menudo el caso en las aplicaciones robóticas, se puede utilizar un control por aprendizaje para corregir los fenómenos no modelados, y de este modo el robot irá corrigiendo sus errores de seguimiento de trayectoria. En la figura 1.18 se muestra el esquema de control para el caso antes mencionado (Silva, 2005)..
(33) Capítulo 1: Fundamentos Teóricos. 22. Figura 1.18. Control Adaptativo por aprendizaje. (Silva, 2005). Para el caso del control del Robotenis, se emplea el esquema de control conocido como “feed-forward compensation” (Silva, 2005), tal y como se muestra en la figura 1.19.. Figura 1.19. Control de trayectoria del Sistema RoboTenis.. En este se utiliza el modelo dinámico en el lazo de prealimentación y un controlador PD en el lazo de realimentación del robot para el control de trayectoria. El modelo dinámico inverso permite calcular los pares necesarios en cada articulación para seguir la trayectoria deseada. Este cálculo se realiza.
(34) Capítulo 1: Fundamentos Teóricos. 23. durante el movimiento (en línea o en tiempo real). Al aplicar el par calculado a cada articulación, la trayectoria se seguirá sin error si el modelo del robot es exacto y si no hay perturbaciones externas (Silva, 2005). 1.2.4 Esquemas de control lineales en cascada Otras variantes de esquemas de control en robots paralelos emplean controles en cascada. Los esquemas de control lineales en cascada, pueden ser de 2 tipos, centralizado y descentralizados. Estos están dados en dependencia de la técnica de linealización que empleen.. Los. conceptos. clásicos del control. pueden ser aplicados, si se utilizan las técnicas de linealización. Estas técnicas pueden ser divididas. en. la linealización de realimentación y linealización. feedforward (Wobbe et al., 2008).. Figura 1.20. Linealización de realimentación propuesto por Wobbe.. Figura 1.21. Linealización Feedforward propuesto por Wobbe..
(35) Capítulo 1: Fundamentos Teóricos Basado sobre las técnicas de la linealización, pueden ser desarrollados. 24 los. esquemas de control conectados en cascada. Debido a su diferencia en la linealización, pueden ser denotados como control centralizado en caso de la linealización de realimentación (Wobbe et al., 2008).. Figura 1.22. Control en cascada centralizado. (Wobbe et al., 2008). Otra variante es la mostrada en la figura 1.23, basada en un control descentralizado que utiliza la linealización “feedforward”.. Figura 1.23. Control en cascada descentralizado. (Wobbe et al., 2008). La cinemática inversa también ha sido empleada para el control de manipuladores paralelos (Gupta et al., 2008), como en el caso del ejemplo que se muestra en la figura 1.24..
(36) Capítulo 1: Fundamentos Teóricos. 25. Figura 1.24. Esquema con cinemática inversa.. En este caso la cinemática inversa se utiliza para generar los parámetros de referencia para el regulador, en un esquema de control articular (Gupta et al., 2008).. 1.2.5 Control por Modo Deslizante Un método muy empleado en el ámbito del control, es el control por Modos Deslizantes, el mismo se basa en la aplicación de una señal de control que es conmutada a alta frecuencia y que pretende llevar el estado del sistema sobre una línea, plano o superficie deslizante determinada (valores deseados), y una vez en ella, mantener el sistema ante posibles perturbaciones externas. Dicha superficie de deslizamiento será definida por el diseñador con el objetivo de que el estado cumpla las especificaciones deseadas. La principal ventaja del control por modos deslizantes es que aporta robustez ante perturbaciones, tanto internas como externas, cuando las mismas son acotadas y conocidas. Ello resulta muy importante en aplicaciones de robótica paralela (Hirschorn, 2006). Este método posee varias restricciones importantes. En primer lugar, el grado relativo del sistema, que puede definirse como el número de veces que hay que derivar la función que describe la superficie de deslizamiento para que la señal.
(37) Capítulo 1: Fundamentos Teóricos. 26. de control aparezca explícitamente, debe ser uno. En segundo lugar, el efecto “chattering” provocado por la conmutación de alta frecuencia de la señal de control puede ser muy perjudicial en determinadas aplicaciones prácticas y se ha visto a menudo como el principal argumento para no emplear este método en el control de robots (Wobbe et al., 2008).. Figura 1.25. Esquema de control por modos deslizantes en el espacio de tareas aplicado a un robot paralelo. (Wobbe et al., 2008). Con el fin de eliminar estas dificultades se aplica el control por Modo Deslizante Dinámico que tiene como metodología introducir dinámica adicional al sistema. Con ello se consigue combinar las ventajas de un control por modo deslizante convencional (insensibilidad ante perturbaciones y no linealidades acotadas) y las de un compensador dinámico tradicional (adaptación a perturbaciones no acotadas). Su ventaja principal es inclusión explícita de incertidumbres al diseño del controlador. 1.2.6 Control Predictivo Otra de las estrategias de control implementadas con el objetivo. de hacer. cumplir las exigencias deseadas en los robots paralelos se encuentra el Control Predictivo. El mismo es un tipo de control de naturaleza abierta dentro del cual se han desarrollado muchas variantes, encontrando gran aceptación tanto en aplicaciones industriales como en el mundo académico. En la actualidad existen.
(38) Capítulo 1: Fundamentos Teóricos. 27. numerosas aplicaciones de controladores predictivos funcionando con éxito, tanto en la industria de procesos como en la robótica. (Alba, 2002). El Control Predictivo se desarrolló en base a dos líneas básicas. Por un lado, a finales de los años setenta surgieron diversos algoritmos que usaban explícitamente un modelo dinámico del proceso para predecir el efecto de las acciones de control futuras en la salida, las cuales eran determinadas minimizando el error predicho sujeto a restricciones de operación, aunque también se desarrolló el Control Predictivo Generalizado (Generalized Predictive Control GPC) que es uno de los métodos más populares en la actualidad (Alba, 2002). En la figura 1.26 se muestra una variante de control predictivo en robot paralelo.. Figura 1.26. Variante de un esquema de control predictivo.. Esta variante necesita el cálculo de la inversa de la matriz jacobiana y de su derivada, lo que compromete su utilización en la mayoría de los sistemas de tiempo real y tiene entre sus principales ventajas que presenta estrategia deslizante, de forma que en cada instante el horizonte se va desplazando hacia el futuro, lo que implica aplicar la primera señal de control en cada instante y desechar el resto, repitiendo el cálculo en cada instante de muestreo (Silva, 2005)..
(39) Capítulo 1: Fundamentos Teóricos. 28. El esquema de la figura 1.27 muestra un Control Predictivo implementado en el robot paralelo H4, propuesto por Andrés Vivas. Este utiliza una variante de Control Predictivo No lineal (NMPC) desarrollado por Richalet, esta variante de Control recibe el nombre de Control Predictivo Funcional (PFC), la cual es una de las variantes de MPC no lineal más populares que existe actualmente (Vivas and Poignet, 2006). En este se logran resultados claramente superiores al implementarse el control predictivo en relación con otras estrategias implementadas como el PID clásico y control por par calculado.. Figura 1.27. Esquema de control para el Robot Paralelo H4 propuesto por Andrés Vivas.. 1.2.7 Otras técnicas de control Dentro de las técnicas que han ido ganando un espacio importante en los últimos años se encuentran las técnicas de control inteligente: la lógica Fuzzy y las Redes Neuronales..
(40) Capítulo 1: Fundamentos Teóricos. 29. La lógica difusa (Fuzzy) tiene como ventaja principal su simplicidad para trabajar problemas complejos como lo son las no linealidades aspecto común en los robots paralelos. Por medio de reglas semánticas establecidas por un experto, se puede compensar los parámetros desconocidos de un modelo, manejar las no linealidades y combinar esto con la robustez de técnicas convencionales como el PI y el PID (Gutierrez, 2003).. Figura 1.28. Esquema de control aplicando la técnica Fuzzy.. La lógica difusa se puede utilizar para compensar parámetros desconocidos en sistemas altamente no lineales. Por su parte las redes neuronales ofrecen ventajas como el aprendizaje, lo que indica que no es necesario conocer el sistema dinámico del sistema, sino el comportamiento que se desea del mismo. La relevancia de las redes neuronales en control radican en que se adaptan a los cambios de la planta, de esta manera tienen un comportamiento satisfactorio en plantas variables no lineales, como es el caso de los robots paralelos. Debido a su capacidad de adaptación las redes neuronales son muy utilizadas para diseñar controladores de manipuladores, ya sea buscando un control óptimo en diseño y robustez, o controlando sistemas que son difícilmente.
(41) Capítulo 1: Fundamentos Teóricos. 30. controlables por técnicas tradicionales, como los robots con muchos grados de libertad, controlar no linealidades en robots y aplicar estos controladores en tiempo real (Gutierrez, 2003)..
(42) Capítulo 2: Sistema Electro-Neumático. 31. CAPĺTULO 2: SISTEMA ELECTRO-NEUMÁTICO 2.1 Introducción En los últimos años, los actuadores neumáticos, se han venido introduciendo en aplicaciones tales como robots paralelos, plataformas de simulación y otras que requieren un posicionamiento continuo (V.Krejnin and Krivts, 2006). Estos constituyen una alternativa a los actuadores lineales eléctricos e hidráulicos, debido a que presenta ventajas significativas con respecto a estos tales como: 9 El aire es de fácil captación y un recurso abundante. 9 El aire no posee propiedades explosivas, por lo que no existen riesgos de incendios. 9 Los actuadores pueden trabajar a velocidades razonablemente altas y fácilmente regulables. 9 Las sobrecargas no constituyen situaciones peligrosas o que dañen los equipos en forma permanente. 9 Los cambios de temperatura no afectan en forma significativa. 9 Constituye una energía limpia. Además al igual que los eléctricos, los actuadores neumáticos son seguros y fiables, poseen una relativa larga vida útil y casi no requieren de mantenimiento. En este capítulo se realizará un análisis del Sistema Electro-Neumático que es utilizado en cada extremidad actuada de la Plataforma SIMPRO de 3 GDL. Primeramente se comentará sobre la importancia del modelo matemático analítico, luego se expondrán algunas características del sistema a identificar y se hará una descripción del funcionamiento del sistema válvula-pistón y posteriormente se expondrá el modelo matemático analítico seleccionado para este caso..
(43) Capítulo 2: Sistema Electro-Neumático. 32. 2.2 Importancia del modelo analítico del sistema electro-neumático El control de los actuadores electro-neumáticos es un proceso relativamente complejo debido a la no linealidad causada por la compresibilidad del aire, a los efectos de las fuerzas de fricción, histéresis y zona muerta de la electro-válvula, todo ello implica que el modelado del sistema válvula-pistón debe ser desarrollado de manera tal que represente lo más fielmente posible todos estos elementos (Velazco, 2007). Por demás, en los actuadores neumáticos la dinámica cambia durante su operación. En tal sentido garantizar el comportamiento del lazo de control impone exigencias a los controladores cuyo ajuste debe ser basado en un modelo adecuado del sistema incluyendo los resultados obtenidos de una buena identificación. El conocimiento del modelo matemático de un sistema, obtenido por métodos analíticos, ayuda en la identificación experimental del sistema especialmente para la selección del orden del modelo paramétrico que se desea obtener y el método de identificación a emplear, pero la determinación práctica de algunos de los coeficientes que conforman el modelo matemático de estos sistemas no es muy sencilla, especialmente los relacionados con las fricciones y el flujo a través de la válvula, máxime si se considera el subdimensionamiento como resultará en el modelo seleccionado para este caso.. 2.3 Sistema electro-neumático Como articulación del sistema objeto de estudio se empleará un Pistón de doble efecto debido a que este satisface las. exigencias de movimiento para la. Plataforma de 3 grados de libertad, así como los requerimientos de peso que es capaz de mover, constantes de tiempo, etc..
(44) Capítulo 2: Sistema Electro-Neumático. 33. Se utilizan pistones de doble efecto debido a que la fuerza ejercida por el aire comprimido empuja al vástago para realizar un movimiento de traslación en los dos sentidos, disponiéndose de una fuerza útil tanto en la ida como en el retorno del vástago, lo cual justifica la elección realizada ya que los actuadotes de la plataforma se moverán controladamente en ambas direcciones. Los pistones de doble efecto se emplean especialmente en los casos en que el vástago tiene que realizar una función también al retornar a su posición inicial. En principio, la carrera de los pistones no está limitada, pero hay que tener en cuenta el pandeo y doblado que puede sufrir el vástago desplazado.. 2.3.1 Funcionamiento del sistema válvula-pistón A continuación se va a proceder a explicar brevemente el funcionamiento del sistema válvula- pistón. El aire es suministrado a una presión (Ps) entra a través de los orificios de áreas Ae1 y Ae2. y sale a la atmosfera a presión Pa a través. de los orificios de áreas As1 y As2 , según la acción de control U aplicada a la válvula, el pistón modifica las presiones P1 y P2 en sus cámaras, que en función de la posición del vástago, tendrán los volúmenes V1 y V2 a ambos lados del vástago.. Las presiones del vástago P1 y P2 actúan sobre las caras del vástago del pistón de áreas A1 y A2 ejerciendo una fuerza que mueve al vástago del pistón a la posición Y, este está sometido a una fuerza externa (Fuerza de Gravedad), dV1 y dV2 representan los volúmenes mínimos que quedan en cada cámara cuando el vástago del pistón está totalmente recogido con respecto a cada una de ellas (García, 2008)..
(45) Capítulo 2: Sistema Electro-Neumático. 34. Figura 2.1. Esquema del sistema válvula-pistón.. El sistema electro-neumático que acciona cada una de las cadenas cinemáticas actuadas emplea un pistón de doble efecto del tipo DNC-125-500-PPV-A y una Electroválvulas Proporcional de Flujo MPYE-5-3/8-010-B. Los datos de funcionamiento del Pistón de doble efecto DNC-125-500-PPV-A y de la Electroválvulas Proporcional de Flujo se encuentran en los anexos I y II respectivamente. El esquema del sistema electro-neumático simplificado de un actuador se muestra en la figura 2.2..
(46) Capítulo 2: Sistema Electro-Neumático. 35. Figura 2.2. Diagrama de bloque del Sistema Electro-Neumático.. 2.4 Modelo matemático analítico Varios modelos para representar el sistema electro-neumático están reportados en la literatura (García, 2008, Rubio, 2007), para él caso del sistema objeto de estudio se empleará el propuesto por E.Rubio en su tesis doctoral, ya que en dicho trabajo se realiza un adecuado modelo para el sistema válvula-pistón considerando el subdimensionamiento de la válvula, lo cual servirá de gran ayuda puesto que el sistema electro-neumático del presente trabajo es prácticamente igual al modelado por el referido autor, con la excepción que solo varían las dimensiones y otros parámetros del pistón, lo cuales pueden ser ajustados de manera relativamente fácil en el modelo antes referido (Rubio, 2007)..
(47) Capítulo 2: Sistema Electro-Neumático. 36. En la formulación se considera que sólo hay fricción viscosa, que la temperatura es constante e igual en ambas cámaras del pistón, que el aire se comporta como un gas ideal y que la válvula es perfectamente ajustada. y su. dinámica. despreciable; utilizando la ecuación de balance de fuerzas y la ecuación de estado de los gases y transformando por Laplace para pequeñas variaciones alrededor de una posición. determinada se obtiene como función de. transferencia, entre la posición (Y) del vástago del pistón y la variable de control (X) (Rubio, 2007), un modelo de tercer orden con un polo en el origen y una ganancia en el numerador:. b 2 s ( s + 2ϕ w n + w n ). Gys ( s ) =. 2. (2.1). Donde wn y φ son la frecuencia natural de oscilación y razón de amortiguamiento del sistema, respectivamente, y b representa la ganancia del mismo. Las cuales se calculan como sigue:. b=. RT M. wn2 =. ϕ=. 1 M. ⎡G G2 ⎤ ⋅⎢ 1 + ⎥ ⎣ yo L − yo ⎦ ⎛A ⋅p G2 ⋅ ⎜⎜ 1 1o + L − yo ⎝ yo. 1 2 ⋅ wn. (2.2). ⎞ fv ⎟⎟ + ⎠ τm ⋅M. ⎡1 f ⎤ ⋅⎢ + v ⎥ ⎣τ m M ⎦. Donde: R:. Constante de los gases (J/kg.oK).. T:. Temperatura del gas en las cámaras (oK).. M:. Masa de la carga y del Pistón (kg).. yo:. Posición de operación (m).. (2.3). (2.4).
(48) Capítulo 2: Sistema Electro-Neumático p1o:. Presión de operación en la 1ra cámara (Pa).. p2o:. Presión de operación en la 2da cámara (Pa).. ƒv:. Constante de fricción viscosa (N/m/s).. L:. Largo del pistón (m).. A1, A2:. Área del Pistón para cada cámara (m2).. G1, G2, C1, y C2 son. las constantes resultantes de evaluar las. 37. derivadas. parciales del flujo másico a través de la válvula, hacia las cámaras del pistón, en el punto de operación, G1 y G2 (kg/s.m2) derivadas parciales respecto al área efectiva y C1 y C2 (kg / s.Pa) derivadas parciales respecto a la presión. Luego a partir de una serie de consideraciones y modificaciones con el objetivo de obtener el modelo dinámico del sistema,. para pequeñas variaciones. alrededor de una posición dada, se obtiene teniendo como posible perturbación una fuerza externa F (en este caso será la fuerza de gravedad), realizando el balance de fuerzas se llega a: A1 ⋅ P1 ( s ) − A2 ⋅ P2 ( s ) + Fext ( s ) = ( M ⋅ s 2 + f v ⋅ s ) ⋅ Y ( s ). A partir de la combinación. (2.5). de ecuaciones matemáticas se obtiene función. transferencial de lazo cerrado de todo el sistema.. A1 ⋅ G1. A2 ⋅ G 2 C1 C2 − τ1 ⋅ s +1 τ 2 ⋅ s +1 Y ( s) = K K X ( s) ⎛ A1 ⋅ 1 y A2 ⋅ 2 y ⎜ C1 C2 s ⋅ ⎜ M ⋅ s + fv + − τ1 ⋅ s +1 τ 2 ⋅ s +1 ⎜ ⎜ ⎝ Con:. ⎞ ⎟ ⎟ ⎟ ⎟ ⎠. (2.6).
(49) Capítulo 2: Sistema Electro-Neumático τ1 =. K1 p C1. y τ2 =. 38. K2p C2. Obteniéndose igualmente partir de modificaciones en las ecuaciones la representación del modelo lineal del sistema realizado en Simulink (Matlab) (Rubio, 2007).. Figura 2.3. Modelo lineal del sistema en el punto de operación. (Rubio, 2007). 2.5 Descripción de la identificación experimental Para obtener experimentalmente el modelo paramétrico del sistema, se somete el mismo a un proceso de identificación que consiste en excitarlo con una señal binaria pseudo aleatoria. (PRBS por sus siglas en ingles), medir la señal. obtenida a la salida y con ambas señales, aplicando métodos de estimación de parámetros, determinar el modelo dinámico discreto que las correlacione adecuadamente (Rubio, 2007). Los métodos de estimación paramétricos dan como resultado una función de transferencia en tiempo discreto que responde a la forma general: y (t ) = G ( z ) ⋅ u (t ) + H ( z ) ⋅ e(t ). (2.7).
(50) Capítulo 2: Sistema Electro-Neumático. 39. Donde los errores del modelo se incluyen en e(t ) mientras que G (z ) y H (z ) son funciones. de transferencia que modelan la parte determinista y estocástica,. respectivamente, del proceso. A partir de la forma general expresada en la ecuación (2.7) se definen diferentes estructuras, según la forma en que se modele el ruido, con sus peculiaridades en cuanto al algoritmo que se utiliza para la determinación de G (z ) y H (z ) y las propiedades que sean asumidas para el ruido (Rubio, 2007). Donde las estructuras más usadas son: 9 ARX (Auto Regressive and Exogenous Variable). 9 ARMAX (Auto Regressive Moving Average and Exogenous Variable). 9 OE (Output Error). 9 BJ (Box-Jenkins). Partiendo del esquema que se muestra en la figura 2.4 se realiza la identificación.. Figura 2.4. Esquema del proceso de identificación. (Rubio, 2007). Para el proceso de identificación se propone escoger la estructura ARMAX ya que esta resultó ser la que brinda mejores resultados en las comparaciones realizadas por E.Rubio en el proceso de identificación..
(51) Capítulo 2: Sistema Electro-Neumático. 40. Esta estructura responde a la forma: A( z ) ⋅ y (t ) = B ( z ) ⋅ u (t − nk ) + e(t ). (2.8). Que es una estructura autoregresiva con variables exógenas suponiendo un ruido blanco de media cero y varianza constante afectado por un filtro de media móvil. Se resuelve minimizando el error de predicción de forma iterativa aplicando el algoritmo de mínimos cuadrados extendido. Además gracias a un adecuado proceso de identificación experimental, es posible calcular los valores de la fricción estática, fricción de Coulomb y la fricción viscosa del pistón. En este sentido, se tiene la ventaja de que se ha ido recibiendo los elementos para llevar a cabo el montaje del banco de pruebas para la realización de las pruebas experimentales, que en un inicio estaban previstas llevar a cabo en este trabajo, pero que por razones de tiempo y falta de algunos dispositivos. resultó imposible realizar el proceso de identificación..
(52) Capítulo 3: Unidades Inerciales de Medición. 41. CAPĺTULO 3: UNIDADES INERCIALES DE MEDICIÓN 3.1 Introducción Una parte importante a la hora de construir un robot es la definición y ubicación de los sensores. Los sensores trasladan la información de la pose del robot desde el mundo real hasta el sistema de cómputo encargado de ejecutar los algoritmos de control del robot, permitiendo cerrar el lazo (Velazco, 2007). A partir de la importancia que reviste la selección de los elementos medición se ha seleccionado para la implementación del esquema control de la Plataforma SIMPRO la Unidad Inercial de Medición, IMU por sus siglas en ingles (Inertial Measurement Unit).. El sensor a emplear para realizar la medición de las. variables de interés para el control es fabricado por Xsens Technologies, brinda la posibilidad de dar información del movimiento dinámico del cuerpo donde estén instaladas.. En un solo módulo sensor inercial se puede encontrar la. adquisición y el procesamiento de los datos de las velocidades angulares y aceleraciones lineales por ejes, brindando como señales de salidas los ángulos de Euler, velocidad y aceleración por ejes. Los valores medidos se transmiten a una determinada frecuencia hacia el elemento de cómputo, a través del puerto serie. En su interior. posee giróscopos integrados que permiten obtener las. velocidades de giro, alrededor de los tres ejes de coordenadas. También mediante acelerómetros se pueden obtener las aceleraciones lineales en los tres ejes, a partir de los cuales se pueden obtener velocidad y posición en cada eje, siendo de gran utilidad tanto para el control como para la sistema de acuerdo a la aplicación que se desee realizar. En la figura 3.1 se muestra el esquema funcional de la IMU.. supervisión del.
(53) Capítulo 3: Unidades Inerciales de Medición. 42. Figura 3.1. Esquema funcional de la IMU.. En este capítulo se presentan las principales características y aplicaciones de este tipo de sensor, así como sus principales limitaciones, errores, calibración, métodos de muestreo, cadenas de salida, y otros parámetros de interés, haciendo hincapié en forma particular en la unidad inercial MTi.. 3.2 Aplicaciones Debido a las prestaciones que brindan las unidades inerciales de medición, así como gran variedad de datos que provee de la orientación y posición de un cuerpo y la calidad de estos, han sido empleados en gran cantidad de aplicaciones, de las cuales durante la revisión bibliográfica realizada se encontraron aplicaciones en el control autónomo de la navegación, medición de la dinámica de los planos (de las acrobacias aéreas), estabilización y corrección de cámaras fotográficas, control para los robots paralelos, control de robots series, control de simuladores de vehículos, control de vehículos de tierra ya sean militares y civiles..
(54) Capítulo 3: Unidades Inerciales de Medición. 43. 3.3 Empleo de la IMU en la Robótica Paralela Una amplia variedad de sensores se emplean en el control de robots paralelos, fundamentalmente dispositivos destinados a la medición de las variables articulares del robot, varios tipos de sensores de posición tanto lineal como angular (como potenciómetros lineales y encoders), acelerómetros, sensores de fuerza, presión, etc. son reportados en la literatura (Yang et al., 2008). En el caso particular del control basado en modelo dinámico en el espacio de tareas, aparece la necesidad de conocer la pose del elemento terminal, efectuar dicha medición es uno de los retos que debe enfrentar la implementación práctica de este tipo de control. En la literatura consultada se encuentran aplicaciones de sensores tales como: sistemas de visión, cámaras, inclinómetros, lasers, etc. para medir los parámetros relacionados con la orientación y/o posición del elemento terminal (Kecskemethy et al., 2008, Amirat et al., 1994). El caso que más práctico sobre empleo de IMU en robot paralelo es el implementado por Gao (Yang et al., 2008) Este lo emplea para realizar la medición de la pose de un robot paralelo. En la figura 3.2 se muestra la representación esquemática del robot paralelo estudiado por Gao en el cual realiza la medición de las variables espaciales del sistema mediante la IMU. Teniendo en cuenta las ventajas y prestaciones de las unidades inerciales medición, en este trabajo se implementará un esquema de control basado en la medición directa de la orientación y posición de la plataforma móvil..
(55) Capítulo 3: Unidades Inerciales de Medición. 44. Figura 3.2. Diagrama esquemático del robot diseñado por Gao.. 3.4 Limitaciones Existen relativamente pocas limitaciones para el empleo de la IMU´s que pudieran influir de manera negativa en la aplicación que va a ser empleada, pudiendo causar errores en la medición (Barrero, 2008). La principal limitación a tener en cuenta son las vibraciones mecánicas ya que pueden llegar a afectar directamente a los acelerómetros. Esto ocurre por dos razones principales. La primera se refiere a que si la magnitud de la vibración es mayor que el rango del acelerómetro, puede provocar que el mismo se sature y tienda a los niveles cero del acelerómetro, lo cual causaría una estimación errónea del Ladeo y del Cabeceo. La segunda posible causa es que si la frecuencia de vibración es más alta que el ancho de banda del acelerómetro, aunque en teoría deberían ser eliminadas estas vibraciones, en la práctica se mantienen ocasionando una subida de aliasing; especialmente si se trata de un ancho de banda limitado, esto puede.
(56) Capítulo 3: Unidades Inerciales de Medición. 45. observarse en bajas frecuencias de oscilación. Una forma de resolver este problema es aislar de las vibraciones a los sensores mediante un aislador (Barrero, 2008).. 3.5 Clasificación de errores La desventaja principal de un sistema de medición inercial es que sus errores tienden para crecer con tiempo, es decir son acumulativos (O’Donovan et al., 2007, Ryu and Gerdes, 2004, Yang et al., 2008). Estos errores en los parámetros calculados por el sensor se deben a diferentes razones, entre las que se incluye: conocimiento imperfecto de las condiciones iniciales, de los errores de cómputo, y principalmente de los errores generados por los giróscopos y los acelerómetros (Webster, 1999).. Los errores se pueden clasificar como: 1. Errores iniciales. 2. Errores en las escala. 3. No linealidades y unión de errores. 4. Errores diagonales. 5. Banda muerta, umbral, resolución, y errores de histéresis. 6. Errores de acumulamiento.. 3.6 Calibración La calibración es el proceso que se lleva a cabo con el fin de garantizar que un determinado dispositivo pueda brindar la información que el sea capas de dar dentro de parámetros permisibles de error, o sea que dicha medición sea confiable..
(57) Capítulo 3: Unidades Inerciales de Medición. 46. Este sensor posee un modo en el cual se entregan los datos calibrados. Solo necesita 500 ms de tiempo de establecimiento, mediante el cual toma los valores que está recibiendo y se calibra automáticamente de acuerdo a la variación de los mismos, durante este tiempo, los valores que se obtienen del sensor deben ser desechados.. 3.7 Estabilidad en la medición Los sensores inerciales deben mantener los ángulos dentro de límites especificados a pesar de los disturbios impuestos por el objeto móvil. Los requisitos de la exactitud exigen que el sistema deba proporcionar la información confiable y estable a pesar de. vibraciones y otros factores que provocan. disturbios. Una forma de alcanzar la estabilización es mantener los acelerómetros y los giróscopos. nivelados y orientados exactamente en la. dirección del acimut (Webster, 1999).. 3.8 Método de muestreo. La IMU puede ser ajustada en dos diferentes modos, el modo de muestreo continuo y modo de muestreo por petición. Usando la IMU en modo de muestreo por petición es necesario enviarle la orden para que prepare los datos, que después serán recibidos por el puerto serie; para el funcionamiento de dicho sensor en este modo se deben enviar las peticiones de. datos cada cierto. tiempo, de acuerdo con la frecuencia de muestreo definida. Esta tarea también puede ser realizada automáticamente por la IMU. En el continuo se entregan los datos automáticamente. modo de muestreo. sin esperar una orden de. preparar datos, de acuerdo con la frecuencia de muestreo que se le definida durante el proceso de configuración (Barrero, 2008)..
(58) Capítulo 3: Unidades Inerciales de Medición. 47. Además este sensor es capaz de realizar la medición de las variables en una amplia gama de frecuencias que van desde los 25, 50, 100, 200, 256, 320, 400 o 512 Hz. Por defecto muestrea a 100 Hz.. 3.9 Cadenas de salida Cada una de las salidas que entrega la IMU, está compuesta por el siguiente formato:. FA FF <identificador> <longitud> <campo de datos> <Chequeo de suma> Donde FA indica el inicio de una cadena, FF indica que la IMU está configurada en el modo de entrega de muestras continuas, el campo identificador contiene la información del tipo de mensaje que se está recibiendo del sensor, la longitud da el tamaño del campo de datos y el chequeo de suma permite verificar que el mensaje sea correcto y no se hayan perdido datos. Excepto el campo de datos, los demás campos ocupan 1 byte dentro de la cadena. La IMU puede entregar el campo de datos en diferentes formatos. En el formato básico se obtienen las medidas de cada uno de los sensores incluidos dentro de la IMU, como son; la aceleración lineal en los tres ejes, velocidad de giro en los tres ejes dados por el giróscopo y el campo magnético en dichos ejes, como se muestra a continuación:. <acc1> <acc2> <acc3> <gyr1> <gyr2> <gyr3> <mag1> <mag2> <mag3> La IMU también puede dar otros tipos de mensajes conocidos como código de error, los cuales ocupan 1 byte (dos números hexadecimales), que pueden ser usados por el programa para detectar cualquier problema en la comunicación o en la configuración de la misma y cada vez que se realiza una configuración.
(59) Capítulo 3: Unidades Inerciales de Medición. 48. para confirmar que no hubo errores, la IMU envía la misma cadena, pero con el campo del identificador incrementado en 1. Estos. mensajes son conocidos. como mensajes de reconocimiento (Barrero, 2008). La IMU emplea el protocolo IEEE-754 para convertir estos valores de número enteros en valores útiles de gran precisión, que en este caso serán empleados para el control.. 3.10 Driver de la IMU. El driver puede inicializar la comunicación serie con la correcta configuración y tiene la función de obtener datos de la IMU y retornar una cadena con el campo de datos de la misma. Este driver está encargado de establecer la frecuencia de muestreo de la IMU accediendo a la configuración de la misma. Inicialmente el driver ajusta a la IMU para que entregue los datos calibrados y en el modo escogido. En caso de algún error durante este proceso, el programa muestra el error en la pantalla, indicando el fallo y detiene el programa si es necesario. El driver recibe la cadena de salida de la IMU, la procesa y devuelve una cadena con los valores obtenidos por este sensor y los almacena en la base de datos (Barrero, 2008). 3.11 Características de la MTi Para realizar la medición de las variables en el espacio de tareas de la plataforma objeto de estudio se empleará como sensor la unidad inercial MTi. Este sensor es una unidad de pequeño tamaño y bajo peso, excelente para el control. Igualmente. contiene los giróscopos, los acelerómetros y los. magnetómetros en forma tridimensional..
Figure



+7






Documento similar
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
