Diseño e implementación de un sistema de control de caudal en brazos de carga de combustible diesel 2 y diesel premium del terminal Beaterio de Petrocomercial
103
0
0
Texto completo
(2) i. DECLARACIÓN. Nosotros, Paúl Fernando Landázuri Guanoluisa y Salguero Luna Pablo Sebastián, declaramos bajo juramento que el trabajo aquí descrito es de nuestra autoría; que no ha sido previamente presentada para ningún grado o calificación profesional; y, que hemos consultado las referencias bibliográficas que se incluyen en este documento. A través de la presente declaración cedemos nuestros derechos de propiedad intelectual correspondientes a este trabajo, a la Escuela Politécnica Nacional, según lo establecido por la Ley de Propiedad Intelectual, por su Reglamento y por la normatividad institucional vigente.. ______________________. ______________________. Paúl Fernando Landázuri Guanoluisa. Pablo Sebastián Salguero Luna.
(3) ii. CERTIFICACIÓN. Certifico que el presente trabajo fue desarrollado por Paúl Fernando Landázuri Guanoluisa y Pablo Sebastián Salguero Luna, bajo mi supervisión.. ________________________ Ing. Jorge Molina. DIRECTOR DEL PROYECTO.
(4) iii. AGRADECIMIENTO Debemos agradecer de manera especial a todas aquellas personas que, de alguna forma, son parte de su culminación.. Nuestros más sinceros. agradecimientos están dirigidos hacia nuestros amigos: Christian López, Francisco Andrade, Darío Jacho, Pamela Gómez, Edwin López, Mario Tapia, del área de Mantenimiento del Terminal Beaterio de EP PETROECUADOR, quienes con su ayuda desinteresada, nos brindaron información importante, concisa y muy cercana a la realidad de nuestras necesidades. Nuestro más amplio agradecimiento al Ing. Francisco De La Torre por abrirnos las puertas del Terminal Beaterio y así poder cumplir con este gran logro en nuestras vidas. A los buenos compañeros hechos en la empresa, los cuáles nos colaboraron en el avance de este proyecto. El agradecimiento más profundo y sentido a nuestras familias por siempre brindarnos su apoyo. Y, desde luego, queremos extender nuestro agradecimiento hacia nuestro director el Ing. Jorge Molina, por su importante aporte en el desarrollo de esta tesis.. Gracias Dios, gracias padres y hermanos, gracias amigos.
(5) iv. DEDICATORIA. Este logro alcanzado lo dedico a mis padres Luis y Carmita quienes con su esfuerzo oportunidad. diario de. me. brindaron. alcanzar. esta. la meta. propuesta, a mis hermanas Mary y Aryta que con su apoyo y consejos supieron encaminarme, y a mi sobrino Mateo que con su alegría me dio fuerzas para culminar este proyecto.. Paúl.
(6) v. DEDICATORIA. Esta tesis está dedicada a quienes son parte de mi familia; a mi MADRE María Elena Luna, mi PADRE Miguel Salguero, a. mi. HERMANO. Miguel. Alejandro. Salguero; por siempre haberme dado su fuerza y apoyo incondicional que me han ayudado y llevado hasta donde estoy ahora. Por último a mis compañeros de universidad. sin. los. cuales. esta. experiencia de vida no hubiese estado llena de tantos buenos momentos.. Pablo.
(7) vi. CONTENIDO DECLARACIÓN ...................................................................................................... i CERTIFICACIÓN ................................................................................................... ii AGRADECIMIENTO ............................................................................................. iii DEDICATORIA ..................................................................................................... iv DEDICATORIA ...................................................................................................... v CONTENIDO ......................................................................................................... vi ÍNDICE TABLAS .................................................................................................... x ÍNDICE FIGURAS ................................................................................................. xi RESUMEN .......................................................................................................... xiii PRESENTACIÓN ................................................................................................ xiv CAPITULO 1 .......................................................................................................... 1 DESCRIPCIÓN DEL SISTEMA ACTUAL .............................................................. 1 1.1.. PROCESO DE ALMACENAMIENTO Y DESPACHO DE DIESEL ........... 1. 1.1.1. DIESEL 2 1.......................................................................................... 4 1.1.2. DIESEL PREMIUM 2 ........................................................................... 5 1.2. EQUIPOS UTILIZADOS EN EL PROCESO ............................................. 6 1.2.1. BOMBAS ............................................................................................ 6 1.2.1.1. Especificaciones de la bomba centrífuga3.................................... 6 1.2.2. MOTORES ......................................................................................... 6 1.2.2.1. Especificaciones del motor eléctrico4 ........................................... 7 1.2.3. CONTROLADORES LÓGICOS PROGRAMABLES (PLC’s) .............. 7 1.2.3.1. PLC Modicon Quantum5............................................................... 8 1.2.3.1.1. Módulo de CPU...................................................................... 8 1.2.3.1.2. Módulo de Entradas ............................................................... 9 1.2.3.1.3. Módulo de Salidas de Relé .................................................. 10 1.2.3.1.4. Módulo de Alimentación de Energía .................................... 11 1.2.3.1.5. Módulo de Comunicación Modbus Plus ............................... 12 1.2.3.1.6. Módulo de Red Ethernet ...................................................... 12 1.2.3.2. PLC Modicon Momentum ........................................................... 13 1.2.3.2.1. Adaptador de Procesador7 ................................................... 14 1.2.3.2.2. Base 170ADM540807 .......................................................... 14 1.2.3.2.3. Base 170ARM370307 .......................................................... 15 1.2.4. TERMINAL GRÁFICA MAGELIS8 .................................................... 16 1.2.4.1. Especificaciones Magelis XBT-G 4330 ...................................... 17 1.2.5. CONTROLADOR ACCULOAD III 9 ................................................... 17 1.2.5.1. Especificaciones Accuload III ..................................................... 18 1.2.6. VÁLVULA DIGITAL ELECTRO-HIDRÁULICA10 ............................... 18 1.2.6.1. Especificaciones válvula modelo 210 de Smith Meter ............... 19.
(8) vii. 1.2.7. MEDIDOR DE DESPLAZAMIENTO POSITIVO11 ............................. 19 1.2.7.1. Especificaciones Medidor Desplazamiento. ............................... 20 1.3. ESTRUCTURA DE LA RED DE COMUNICACIÓN ................................ 20 1.3.1. PROTOCOLOS DE COMUNICACIÓN ............................................. 21 1.3.1.1. Modbus12 .................................................................................... 21 1.3.1.2. Modbus Plus12 ............................................................................ 22 1.3.1.3. Ethernet13 ................................................................................... 22 1.3.2. TOPOLOGIA DE LA RED ................................................................. 23 1.3.2.1. Topología en Estrella14............................................................... 23 1.3.2.2. Topología en Bus15 .................................................................... 24 1.4. PRINCIPALES INCONVENIENTES DEL ACTUAL SISTEMA ................ 25 1.5.. SOLUCION PROPUESTA ...................................................................... 26. 1.6.. OBJETIVO DEL PROYECTO Y TRABAJOS A EJECUTAR ................... 26. CAPITULO 2 ........................................................................................................ 28 DISEÑO DEL SISTEMA....................................................................................... 28 2.1.. ESQUEMA GENERAL DE LA RED DE CONTROL Y GRUPOS DE BOMBEO ................................................................................................ 28. 2.2.. DISEÑO DEL CIRCUITO ELÉCTRICO PRINCIPAL............................... 30. 2.2.1. ESPECIFICACIONES DE LOS EQUIPOS INCORPORADOS ......... 32 2.2.1.1. Variadores de Velocidad ............................................................ 32 2.2.1.2. Contactor Electromagnético ....................................................... 32 2.2.1.3. Transmisor de Presión ............................................................... 33 2.3. DISEÑO DEL CIRCUITO DE CONTROL................................................ 33 2.4.. DISEÑO Y DESARROLLO DEL SOFTWARE. ....................................... 34. 2.4.1. PROGRAMACIÓN DEL PLC QUANTUM ......................................... 34 2.4.1.1. Subrutina Programa Principal .................................................... 35 2.4.1.2. Subrutina Datos HMI .................................................................. 36 2.4.1.3. Subrutina Lectura de Entrada y Salidas. .................................... 37 2.4.1.4. Subrutina Accionamiento de Bombas ........................................ 38 2.4.1.5. Subrutina Secuencia de Operación de Bombas......................... 40 2.4.1.6. Subrutina Control de Velocidad.................................................. 41 2.4.2. RECONFIGURACIÓN DE LA HMI E INTERFAZ DE OPERADOR .. 44 2.4.2.1. Reconfiguración de la HMI en Intouch ....................................... 44 2.4.2.1.1. Pantalla de Configuración de Bombas ................................. 44 2.4.2.1.2. Pantalla de Operación Diesel 2........................................... 45 2.4.2.1.3. Pantalla de Operación Diesel Premium ............................... 45 2.4.2.1.4. Pantalla de Estado de válvulas. ........................................... 46 2.4.2.1.5. Pantalla del Estado de Bombas con Variador de Velocidad 47 2.4.2.1.6. Pantalla del Estado de Bombas sin Variador de Velocidad . 47 2.4.2.2. Reconfiguración de la Interfaz de Operador Magelis ................. 48 2.4.2.2.1 Pantalla Inicial ....................................................................... 48 2.4.2.2.2 Pantalla Configuración de Bombas ....................................... 49 2.4.2.2.3 Pantalla Despacho – Operación ........................................... 51 2.4.2.2.4 Pantalla Estado de Válvulas ................................................. 52.
(9) viii. 2.4.2.2.5 Pantalla Estado de Bombas.................................................. 53 2.4.2.2.6 Pantalla de Alarmas .............................................................. 54 CAPITULO 3 ........................................................................................................ 56 IMPLEMENTACIÓN DEL SISTEMA.................................................................... 56 3.1.. ESPECIFICACIONES DE LOS EQUIPOS INSTALADOS ...................... 56. 3.1.1. VARIADORES DE VELOCIDAD....................................................... 56 3.1.1.1. Características del Altivar 61...................................................... 56 3.1.2. CONTACTORES ELECTROMÁGNETICOS .................................... 57 3.1.2.1. Características del Contactor ..................................................... 57 3.1.3. TRANSMISOR DE PRESIÓN ........................................................... 58 3.1.3.1 Características del Transmisor................................................... 58 3.1.4. RELÉS ELECTROMAGNÉTICOS .................................................... 58 3.1.4.1 Características de los Relés....................................................... 59 3.2. MONTAJE E INSTALACIÓN DE EQUIPOS ........................................... 59 3.2.1. 3.2.2. 3.2.3. 3.2.4. 3.3.. INSTALACIÓN DEL TRANSMISOR DE PRESIÓN .......................... 60 MONTAJE E INSTALACIÓN DE UN MANÓMETRO........................ 60 MONTAJE E INSTALACIÓN DE RELÉS .......................................... 61 MONTAJE DE BANDEJA PARA CABLEADO DE FUERZA Y CONTROL ....................................................................................... 61 MODIFICACIÓN DE CIRCUITO Y CONEXIONES ................................. 62. 3.3.1. MODIFICACIÓN DE CONEXIONES DE LA CELDAS DE LOS VARIADORES DE VELOCIDAD....................................................... 62 3.3.2. MODIFICACIÓN DE LAS CONEXIONES EN EL PLC QUANTUM .. 64 3.3.3. MODIFICACIÓN DE CONEXIONES DE ARRANCADORES PARA MOTORES ....................................................................................... 64 3.3.4. MODIFICACIÓN DE LAS CONEXIONES DE TRES CONTACTORES TAMAÑO NEMA 3 ............................................................................ 65 3.4. INTEGRACIÓN DEL SISTEMA DE CONTROL Y VISUALIZACIÓN ...... 65 3.4.1. CONFIGURACIÓN DEL VARIADOR DE VELOCIDAD ALTIVAR 61 66 3.4.2. CONFIGURACIÓN Y DESCARGA DEL NUEVO PROGRAMA AL PLC QUANTUM................................................................................ 66 3.4.3. PRUEBAS DE COMUNICACIÓN ENTRE PLC, VARIADOR DE VELOCIDAD Y TERMINAL MAGELIS.............................................. 67 3.4.4. PRUEBA DE FUNCIONAMIENTO DEL SISTEMA DE DESPACHO A TRAVÉS DE LA HMI ..................................................................... 68 3.4.5. AJUSTE DE PARÁMETROS DE FUNCIONAMIENTO DEL SISTEMA .......................................................................................... 70 CAPITULO 4 ........................................................................................................ 71 PRUEBAS Y RESULTADOS ............................................................................... 71 4.1. PRUEBAS OPERATIVAS ....................................................................... 71. 4.1.1 PRUEBA DE DESPACHO SIN VARIADORES DE VELOCIDAD ..... 71 4.1.1.1. Mediciones para un volumen de despacho de 1000 Gl ............ 71 4.1.1.2. Tiempo de funcionamiento de los Brazos de Carga en una semana ...................................................................................... 72.
(10) ix. 4.1.1.3. Consumo de energía de los grupos de bombeo durante una semana laboral........................................................................... 72 4.1.1.4. Tiempo de operación de los Grupos de Bombeo ....................... 73 4.1.2 PRUEBA DE DESPACHO CON VARIADORES DE VELOCIDAD ... 73 4.1.2.1. Mediciones realizadas para un volumen de despacho de 1000 Gl....................................................................................... 73 4.1.2.2. Tiempo de funcionamiento de los Brazos de Carga en una semana ...................................................................................... 74 4.1.2.3. Consumo de energía de los grupos de bombeo durante una semana laboral........................................................................... 74 4.1.2.4. Tiempo de operación de los Grupos de Bombeo ....................... 75 4.2 ANÁLISIS DE RESULTADOS................................................................. 76 CAPITULO 5 ........................................................................................................ 78 CONCLUSIONES Y RECOMENDACIONES ....................................................... 78 5.1.. CONCLUSIONES ................................................................................... 78. 5.2.. RECOMENDACIONES ........................................................................... 79. CAPITULO 6 ........................................................................................................ 80 REFERENCIAS BIBLIOGRÁFICAS .................................................................... 80 ANEXO I ............................................................................................................ 81 (PLANOS) ..................................................................................................... 81 ANEXO II ........................................................................................................... 82 (DIAGRAMAS DE RED) ................................................................................ 82 ANEXO III .......................................................................................................... 83 (TABLAS DIRECCIONAMIENTO DE VARIABLES) ...................................... 83 ANEXO IV .......................................................................................................... 84 (CONFIGURACIÓN Y SOFTWARE DEL EQUIPO DE CONTROL) ............. 84 ANEXO V ........................................................................................................... 85 (CÁLCULO DEL CABLE) .............................................................................. 85 ANEXO VI .......................................................................................................... 86 (CERTIFICADO DE FUNCIONAMIENTO DEL SISTEMA) ........................... 86 ANEXO VII ......................................................................................................... 87 (CATÁLOGOS) ............................................................................................. 87.
(11) x. ÍNDICE TABLAS Tabla 1. 1: Tanques con su producto de almacenamiento. .................................... 2 Tabla 1. 2: Bombas utilizadas en el despacho. ...................................................... 3 Tabla 1. 3: Brazos de Carga de Diesel. .................................................................. 3 Tabla 1. 4: Número de bombas en función del número de brazos de carga. ....... 25 Tabla 2. 2: Ejemplo de designación de variables. ................................................ 35 Tabla 2. 3: Secuencias de Operaciones ............................................................... 40 Tabla 2. 4: Set point según número de brazos. .................................................... 42 Tabla 2. 5: Velocidad según número de brazos. .................................................. 42 Tabla 4. 1: Datos del despacho de 1000 galones sin variadores de velocidad .... 72 Tabla 4. 2: Tiempo de funcionamiento de los Brazos de Carga durante una semana sin variadores de velocidad .................................................................... 72 Tabla 4. 3: Consumo de energía de los grupos de bombeo durante una semana sin variadores de velocidad .................................................................................. 73 Tabla 4. 4: Tiempo de operación de los Grupos de Bombeo sin variadores de velocidad .............................................................................................................. 73 Tabla 4. 5: Datos del despacho de 1000 galones con variadores de velocidad ... 74 Tabla 4. 6: Tiempo de funcionamiento de los Brazos de Carga durante una semana con variadores de velocidad ................................................................... 74 Tabla 4. 7: Consumo de energía de los grupos de bombeo durante una semana con variadores de velocidad ................................................................................. 75 Tabla 4. 8: Tiempo de operación de los Grupos de Bombeo con variadores de velocidad .............................................................................................................. 75 Tabla 4. 9: Ahorro de energía y tiempo del nuevo sistema en comparación con el antiguo sistema de despacho de diesel 2 ............................................................ 77 Tabla 4. 10: Porcentaje de ahorro de energía y tiempo de funcionamiento del nuevo sistema en comparación con el antiguo sistema de despacho de diesel 2. ................................................................................................................ 77.
(12) xi. ÍNDICE FIGURAS Figura 1. 1: Área de Tanques del Terminal El Beaterio.......................................... 1 Figura 1. 2: Patio de Bombas. ................................................................................ 2 Figura 1. 3: Isla de Despacho................................................................................. 4 Figura 1. 4: Bomba Flowserve Durco Mark III.3 ...................................................... 6 Figura 1. 5: Motor Eléctrico US.4 ............................................................................ 7 Figura 1. 6: Plataforma PLC Quantum. .................................................................. 8 Figura 1. 7: Módulo 140CPU11303. ....................................................................... 9 Figura 1. 8: Esquema de cableado.6 .................................................................... 10 Figura 1. 9: Esquema de cableado y Estructura del Relé.6 .................................. 11 Figura 1. 10: Módulo 140CPS11410 .................................................................... 11 Figura 1. 11: Módulo 140NOM21100. .................................................................. 12 Figura 1. 12: Módulo 140NOE77111 .................................................................... 13 Figura 1. 13: TSX Momentum Base I/O y Adaptador. .......................................... 13 Figura 1. 14: Adaptador Procesador 171CCC78010 ............................................ 14 Figura 1. 15: TSX Momentum 170ADM54080...................................................... 15 Figura 1. 16: TSX Momentum 170ARM37030...................................................... 15 Figura 1. 17: Terminal gráfica Magelis XBT-G 4330. (Vista posterior) ................. 16 Figura 1. 18: Accuload III ..................................................................................... 17 Figura 1. 19: Válvula digital Electro-Hidráulica modelo 210. ................................ 18 Figura 1. 20: Modelo Esquemático. ...................................................................... 19 Figura 1. 21: Medidor Modelo F4-S1 .................................................................... 20 Figura 1. 22: Estructura lógica MODBUS ............................................................. 21 Figura 1. 23: Red en topología de estrella. .......................................................... 24 Figura 1. 24: Red en topología de bus. ................................................................ 24 Figura 2. 1: Esquema de la nueva red de control y grupos de bombeo. .............. 29 Figura 2. 2: Diagrama eléctrico unifilar. ................................................................ 31 Figura 2. 3: Subrutina Programa Principal ........................................................... 36 Figura 2. 4: Subrutina Datos HMI ......................................................................... 37 Figura 2. 5: Subrutina Lectura de Entradas y Salidas. ......................................... 38 Figura 2. 6: Subrutina Accionamiento de Bombas. .............................................. 39 Figura 2. 7: Subrutina Secuencia de Operación de Bombas ................................ 41 Figura 2. 8: Subrutina Control de Velocidad. ........................................................ 43 Figura 2. 9: Pantalla de Configuración de Bombas .............................................. 44 Figura 2. 10: Pantalla de Operación Diesel 2 ....................................................... 45 Figura 2. 11: Pantalla de Operación Diesel Premium........................................... 46 Figura 2. 12: Pantalla de Estado de válvulas ....................................................... 46 Figura 2. 13: Pantalla del Estado de Bombas con Variador de Velocidad ........... 47 Figura 2. 14: Pantalla del Estado de la Bomba sin Variador de Velocidad ........... 47 Figura 2. 15: Pantalla inicial de la Terminal Magelis ............................................ 48 Figura 2. 16: Pantalla Menú Principal................................................................... 49 Figura 2. 17: Pantalla Configuración de Bombas ................................................. 50 Figura 2. 18: Pantalla Configuración de Bombas para Diesel 2 ........................... 50 Figura 2. 19: Pantalla Configuración de Bombas para Diesel Premium ............... 51 Figura 2. 20: Pantalla “Despacho- Operación” ..................................................... 51 Figura 2. 21: Pantalla Operación de Diesel 2 ....................................................... 52 Figura 2. 22: Pantalla Operación de Diesel Premium........................................... 52.
(13) xii. Figura 2. 23: Pantalla Estado de Válvulas ............................................................ 53 Figura 2. 24: Pantalla Estado de Bombas con Variador de Velocidad ................. 53 Figura 2. 25: Pantalla Estado de bombas sin Variador de Velocidad ................... 54 Figura 2. 26: Ejemplo cuando se activa una alarma............................................. 54 Figura 2. 27: Pantallas de Alarmas ...................................................................... 55 Figura 2. 28: Pantalla para desactivar alarmas .................................................... 55 Figura 3. 1: Variador de Velocidad Altivar 61 (ATV61HD30N4) ........................... 56 Figura 3. 2 Contactor Square D........................................................................... 57 Figura 3. 3: Transmisor de Presión Viatran .......................................................... 58 Figura 3. 4: Relés AMF Potter & Brumfield........................................................... 59 Figura 3. 5: Transmisor de presión....................................................................... 60 Figura 3. 6: Manómetro ........................................................................................ 60 Figura 3. 7: Relés Electromagnéticos................................................................... 61 Figura 3. 8: Bandeja para cableado de fuerza y control ....................................... 61 Figura 3. 9: Celda del Variador de Velocidad ....................................................... 63 Figura 3. 10: Dispositivos de mando manual y señalización ................................ 63 Figura 3. 11: Arrancador para el motor 15 ........................................................... 64 Figura 3. 12: Contactores NEMA 3....................................................................... 65 Figura 3. 13: Ventana de descarga del programa ................................................ 66 Figura 3. 14: Comunicación entre variador de velocidad y el PLC Quantum ....... 67 Figura 3. 15: Mensaje de error de comunicación Magelis con PLC ..................... 68 Figura 3. 16: Ventana de despacho de combustible en la Isla 2 .......................... 69 Figura 3. 17: Ventana de despacho de combustible en la Isla 3 .......................... 69.
(14) xiii. RESUMEN Este proyecto trata sobre el diseño e implementación de un sistema de control de caudal en brazos de carga de combustible Diesel 2 y el diseño para Diesel Premium del Terminal Beaterio de EP-PETROECUADOR. El sistema cuenta con tres tanques de almacenamiento de combustible, tres bombas y cinco brazos de carga para Diesel 2. Un controlador Accuload III se encarga del control del volumen y flujo por cada dos brazos de carga mediante válvulas electro-hidráulicas, y envía señales discretas a un PLC Modicon Momentum indicando el flujo requerido por los brazos. Un PLC Modicon Quantum, que se comunica con los PLC’s Modicon Momentum a través de una red Modbus Plus, controla el accionamiento de las bombas. El accionamiento de las bombas se realiza mediante un lazo cerrado de control compuesto por tres contactores, dos variadores de velocidad y un transmisor de presión. La velocidad de las bombas es regulada, según los requerimientos del sistema, mediante dos controladores PI, cuyos parámetros son ajustados en el programa del PLC. Además de regular el caudal, el sistema de control se encarga de mantener un trabajo equilibrado de las bombas en cuanto a horas de funcionamiento. Adicionalmente, el proyecto contempla la modificación de la HMI del centro de control y de una interfaz gráfica tipo “touch screen”, a través de las cuales se supervisa el funcionamiento del sistema y se adquieren datos sobre disponibilidad de bombas, horas de funcionamiento, corriente, velocidad, alarmas, entre otros. Como resultados de la ejecución de este proyecto se obtuvo el arranque y parada suave de los grupos de bombeo y, consecuentemente, la disminución de los golpes de ariete en accesorios y tuberías; se logró un ahorro en el consumo de energía eléctrica de aproximadamente un 14%; y un trabajo balanceado de los grupos de bombeo..
(15) xiv. PRESENTACIÓN Este proyecto,. cuya ejecución se llevó a cabo en Terminal Beaterio de EP-. PETROECUADOR, fue pensado con el propósito de regular el caudal de combustible en función de las necesidades de despacho, disminuir el constante golpe de ariete y por ende posibles agotamientos de los accesorios instalados, reducir el consumo de energía innecesario y distribuir equitativamente los tiempos de operación de los grupos de bombeo para llevar un programa de mantenimiento adecuado y prolongar su vida útil. Para cumplir con los objetivos expuestos, fue necesario reconfigurar el sistema de fuerza de los grupos de bombeo incorporando accionamientos de velocidad variable e implementar un sistema de control que regule la velocidad, el arranque y parada de estos grupos. El desarrollo de este proyecto está descrito en cinco capítulos que se resumen a continuación. En el Capítulo Uno se describe el funcionamiento del sistema de despacho, la descripción y especificaciones de los equipos utilizados en el proceso, y la estructura de la red de campo. El Capítulo Dos corresponde a la etapa de diseño, en la cual se detallan las condiciones de operación del nuevo sistema, los circuitos de control y potencia, el desarrollo de la lógica de control, la reprogramación del PLC y las modificaciones realizadas a las interfaces de operador. En el Capítulo Tres, se tratan algunos detalles sobre la implementación y puesta en marcha del nuevo sistema. En el Capítulo Cuatro, se describen las pruebas realizadas y se hace un breve análisis sobre los resultados obtenidos..
(16) xv. En el Capítulo Cinco, con base a los resultados obtenidos y la experiencia práctica lograda durante el desarrollo de este proyecto, se presentan las principales conclusiones de su ejecución y se sugieren algunas recomendaciones..
(17) 1. CAPITULO 1 DESCRIPCIÓN DEL SISTEMA ACTUAL 1.1.. PROCESO DE ALMACENAMIENTO Y DESPACHO DE DIESEL. En el Terminal El Beaterio se realizan básicamente tres actividades que son: la recepción de productos, el almacenamiento y despacho; y la comercialización. El Terminal es abastecido del Combustible Diesel desde el Poliducto ShushufindiQuito. La Estación Reductora de Presión del Poliducto Quito-Ambato, es la encargada de recibir el producto, disminuir la presión y almacenar para proceder al despacho en tanques fijos verticales, debidamente señalizados de acuerdo al producto que contienen. Cada tanque tiene instalado un Sistema de Medición tipo Radar que contiene sensores de temperatura, presión y agua. Además poseen diques diseñados para contener el producto del tanque en caso de producirse un derrame.. Figura 1. 1: Área de Tanques del Terminal El Beaterio..
(18) 2. Para el almacenamiento de diesel se utilizan cinco tanques: TANQUE. PRODUCTO. ATNK-010010. Diesel 2. ATNK-010011. Diesel 2. ATNK-010013. Diesel 2. ATNK-010016. Diesel Premium. ATNK-010022. Diesel Premium. Tabla 1. 1: Tanques con su producto de almacenamiento. Para el despacho del combustible se trabaja con siete electrobombas centrifugas horizontales (1000 gpm) ubicadas en el patio de bombas, las cuales se encargan de extraer el combustible desde los tanques y transportarlo hasta las islas de carga y distribución, o al retorno de producto a los tanques. El accionamiento de las bombas se lo realiza por arranque directo mediante contactores ubicados en el centro de control de motores (MCC), controlados por un PLC Modicon Quantum.. Figura 1. 2: Patio de Bombas. La selección del tanque que va a distribuir producto y el resto de entradas de las bombas se realiza a través de una serie de válvulas manuales y actuadores que.
(19) 3. se encuentran a lo largo de las tuberías de distribución del combustible. Cada una de las bombas utilizadas para el despacho posee una salida que se juntan en una sola tubería (manifold) que entrega el producto a los brazos de carga. BOMBA. PRODUCTO. PUMP-010109. Diesel Premium. PUMP-010110. Diesel Premium. PUMP-010111. Diesel Premium. PUMP-010112. Diesel Premium. PUMP-010113. Diesel 2. PUMP-010114. Diesel 2. PUMP-010115. Diesel 2. Tabla 1. 2: Bombas utilizadas en el despacho. En las islas de despacho (Isla 3) existen nueve brazos de carga de diesel (500 gpm), con sus respectivo sistema de medición, el cual consta de una válvula manual para dar mantenimiento al brazo, un filtro para eliminar partículas no deseadas, un medidor de desplazamiento positivo, una válvula de control por cada brazo de carga y un controlador Accuload III por cada dos brazos, encargado de controlar el flujo y medir la cantidad de volumen despachado. Por cada dos brazos de carga es necesario activar una bomba. BRAZO. PRODUCTO. BC-010206. Diesel Premium. BC-010207. Diesel Premium. BC-010210. Diesel Premium. BC-010223. Diesel Premium. BC-010213. Diesel 2. BC-010214. Diesel 2. BC-010217. Diesel 2. BC-010218. Diesel 2. BC-010220. Diesel 2. Tabla 1. 3: Brazos de Carga de Diesel..
(20) 4. Figura 1. 3: Isla de Despacho.. Además se cuenta con una HMI desarrollada en el software Intouch para las PC’s ubicadas en la sala de control, y una en Vijeo-Designer para una pantalla touch Magelis ubicada en el MCC. En la PC principal se realiza la selección de la bomba que funcionará como principal, auxiliar 1 y auxiliar 2, se despliega un esquema general del proceso donde se visualizan las bombas y actuadores que están en funcionamiento, el nivel de producto de los tanques de almacenamiento, así como también muestra información sobre cada bomba como velocidad, local/remoto, encendido/apagado. En la pantalla Magelis únicamente se realiza la selección de las bombas. En los planos 1 y 2 correspondientes a los Diagramas de Flujo del Anexo I, se muestra un esquema de tanques, conexión de tuberías, válvulas, bombas y demás elementos que intervienen en el sistema de despacho de Diesel 2 y Diesel Premium respectivamente.. 1.1.1. DIESEL 2 1 El diesel 2 es la segunda fracción importante que se obtiene en la destilación atmosférica del petróleo..
(21) 5. Los componentes de este producto son hidrocarburos que destilan entre los 200°C y 300°C, los hidrocarburos más importantes que entran en la composición química de este combustible son: parafínicos, izoparafínicos, aromáticos (monociclo y biciclos), nafténicos y estructuras mixtas nafteno-aromático. Las ventajas del uso Diesel 2 son: ! Tiene una buena combustión, con llama blanca amarillenta debido al bajo contenido de hidrocarburos aromáticos. ! La apariencia del producto es blanca transparente y la acidez orgánica se expresa en mg de KOH/ 100 ml, no sobrepasa de 1,4 %, lo cual evita la acción corrosiva sobre los metales.. 1.1.2. DIESEL PREMIUM 2 Es un combustible obtenido de la destilación primaria del petróleo. Es un destilado medio que se encuentra entre el kerex y el aceite lubricante. Sus componentes elementales son el carbono, el hidrógeno y el azufre. El producto ecológico tiene un máximo del 0.05% de azufre, es decir 0.65% menos que el diesel 2. Las ventajas del uso Diesel Premium son: ! Reducir las emisiones gaseosas tóxicas como el dióxido de azufre (SO2) y trióxido de azufre, (SO3); gases que cuando entran en contacto con el agua, H2O, forman la llamada lluvia ácida", cuyo efecto es tóxico y nocivo para los ecosistemas. ! Disminuir el efecto corrosivo en los motores y accesorios metálicos de los vehículos, aumentando la vida útil de los mismos y mejora la calidad del aire..
(22) 6. 1.2.. EQUIPOS UTILIZADOS EN EL PROCESO. 1.2.1. BOMBAS Son las encargadas de elevar, transferir e impulsar el producto consiguiendo aumentar la presión o energía del líquido.. Figura 1. 4: Bomba Flowserve Durco Mark III.3 1.2.1.1. Especificaciones de la bomba centrífuga3 Marca: Flowserve Durco Mark III Modelo: 2K6x4-10HRV Capacidad: 1000 GPM. Tipo de impulsor: Aspas invertidas (RV) Tipo de bomba: Centrífuga. Tamaño tobera de succión: 6”. Tamaño tobera de descarga: 4”. Diámetro máximo de impulsor: 10”. Peso Neto: 149 Kg. Caudal mínimo: 50% del BEP (Capacidad en el punto de mayor eficacia). Temperatura ambiente mínima: -29º C. Temperatura ambiente máxima: 175º C.. 1.2.2. MOTORES Encargados de transformar la energía eléctrica en mecánica la cual es entregada a la bomba para producir el movimiento..
(23) 7. Figura 1. 5: Motor Eléctrico US.4 1.2.2.1. Especificaciones del motor eléctrico4 Modelo: AD75 Voltaje: 230/460 Vac. Corriente a máxima carga: 59.8/29.9 A. Potencia: 25 HP. Frecuencia: 60 Hz. Velocidad a máxima carga: 1775 RPM. Número de fases: 3. Factor de servicio: 1.15 Temperatura ambiente máxima: 40º C. Número de polos: 4 Torque a máxima carga: 74 Lbs-pie. Torque de arranque: 141.34 Lbs-pie. Eficiencia: 92.4% Tipo de carcasa: TE (Totalmente encerrado). Peso: 159 Kg. Tipo de motor: Asincrónico, jaula de ardilla.. 1.2.3. CONTROLADORES LÓGICOS PROGRAMABLES (PLC’s) En el control del sistema intervienen dos tipos de PLC’s: El Modicon Quantum que actúa como principal y se encarga del control del sistema en general, y dos Modicon Momentum para el control de actuadores del patio de bombas y tanques..
(24) 8. 1.2.3.1. PLC Modicon Quantum5 El sistema Quantum de Modicon es un sistema informático de propósito especial que dispone de funciones de procesamiento digital. Está diseñado para controlar en tiempo real aplicaciones industriales y de fabricación dentro de una arquitectura modular ampliable, mediante la utilización de los siguientes módulos: ! CPU ! Interfaz de red de E/S ! Fuente de alimentación ! Entradas/Salidas (E/S) ! E/S inteligentes/de propósito especial ! Simulador (XSM) ! Platinas principales ! Cableado CableFast. Figura 1. 6: Plataforma PLC Quantum. A continuación se describe cada módulo que compone el PLC Quantum:. 1.2.3.1.1. Módulo de CPU El módulo de controlador utilizado es el 140CPU11303, compatible con el software Concept y ProWORX, cuenta con la memoria de ejecución, memoria de la aplicación y los puertos de comunicación incorporados, cuyas características se muestran a continuación:.
(25) 9. ! Memoria: 512 Kbytes SRAM. ! Memoria de usuario Lógica Ladder: Máximo palabras de 16k. ! Capacidad de bits: Máximo de 8192 entradas y 8192 salidas. ! Capacidad de registro: Máximo de 9999 palabras. ! 1 puerto serie Modbus (RS-232) (D-shell 9 pins). ! 1 puerto de red Modbus Plus (RS-485) (D-shell 9 pins). ! Velocidad reloj: 20 MHz. ! Tiempo de solución lógico: 0,3 ms/k a 1,4 ms/k. ! Tiempo de vigilancia Watchdog: 250 ms (ajustable por software). ! Batería: 3 V de litio.. 1. Número de modelo, código de color. 2. Señalización luminosa. 3. Puerta extraíble. 4. Batería. 5. Switch parámetros de comunicación. 6. Puerto Modbus canal A. 7. Puerto Modbus canal B. 8. Puerto Modbus Plus.. Figura 1. 7: Módulo 140CPU11303.. 1.2.3.1.2. Módulo de Entradas El módulo utilizado es el 140DAI54000, sus características se describen a continuación: ! Voltaje entrada: 115 Vac. ! Corriente de bus requerida: 180 mA. ! Cantidad de canales de entrada: 16 con separación de potencial individual. ! Direccionamiento: 1 palabra de entrada. ! Separación de potencial: 1.780 Vac por 1 minuto. ! Rango Frecuencia: 47 a 63 Hz..
(26) 10. ! Límite de Entrada Activo: 79 a 132 Vac, 13,2 mA máx. ! Límite de Entrada Inactivo: 0 a 20 Vac. ! Tiempo de Respuesta On-Off: Minino 4.9 ms; Máximo 0.75 por ciclo. ! Tiempo de Respuesta Off-On: Minino 7.3 ms; Máximo 12.3 ms. ! Potencia de disipación: 5,5 W máximo. En la siguiente figura se muestra el esquema de cableado:. Figura 1. 8: Esquema de cableado.6 1.2.3.1.3. Módulo de Salidas de Relé El módulo de salidas de relé se utiliza para conmutar una fuente de tensión mediante 16 relés con contactos de tipo normal abierto. El módulo utilizado es el 140DRA84000 y sus características son: ! Cantidad de canales: 16. ! Tipo de Relés: Contactos Normalmente Abiertos. ! Voltaje Nominal: 20 a 250 Vac. ; 5 a 30 Vdc a máxima carga. ! Corriente de carga: 2 A máx. ! Corriente de bus requerida: 1100 mA. ! Direccionamiento: 1 palabra de salida. ! Tiempo de Respuesta On-Off: Máximo 20 ms. ! Tiempo de Respuesta Off-On: Máximo 10 ms. ! Protección de contactos: Varistor 275 V (interna). ! Separación de potencial: 1.780 Vac por 1 minuto. ! Potencia de disipación: 5,5 W máximo..
(27) 11. En la siguiente figura se muestra el esquema de cableado y la estructura del relé:. Figura 1. 9: Esquema de cableado y Estructura del Relé.6. 1.2.3.1.4. Módulo de Alimentación de Energía Este módulo proporciona alimentación al sistema y le protege del ruido y desbalances de voltaje, sobrecorriente y sobrevoltaje. En caso de una pérdida imprevista de energía, tiene el tiempo adecuado para guardar y apagarse. El módulo usado es el 140CPS11410 y sus características son: ! Voltaje entrada: 125 / 230 Vac. ! Corriente entrada: 1.1 / 0.6 A. ! Frecuencia: 45 a 60 Hz. ! Distorsión armónica total: Inferior al 10% del valor eficaz fundamental. ! Protección externa: Fusible de 2,0 A con retardo. ! Salida de voltaje: 5,1 Vdc. ! Corriente máxima salida: 8 A a 60 ºC.. Señalización luminosa. ! Pwr ok (Verde). Conector Cableado (7 borneras). ! 1 y 2: Conexión Interna. ! 3 y 4: Puente para 115 Vac. ! 5: Línea Vac. ! 6: Neutro Vac. ! 7: Tierra.. Figura 1. 10: Módulo 140CPS11410.
(28) 12. 1.2.3.1.5. Módulo de Comunicación Modbus Plus El módulo de comunicación Modbus Plus permite que un sistema Quantum pueda establecer comunicaciones, dentro de una configuración Modbus Plus con otros equipos que dispongan este tipo de protocolo de comunicación. El módulo utilizado es el 140NOM21100, sus características son: ! 1 puerto (RS-485) de red Modbus Plus (conector 9 pines). ! 1 puerto (RS-232) de red Modbus (conector 9 pines). ! Voltaje entrada: 125/230 Vac. ! Rango de frecuencia: 47 a 63 Hz. ! Corriente bus requerida: 780 mA. ! Disipación de potencia: 4 W. ! Tipo cable: Cable par trenzado. ! I/O: 30 palabras de entrada y 32 palabras de salida.. Señalización luminosa ! Ready (Verde) ! Fault (Rojo) ! Power ok (Verde) ! Modbus + (Verde) ! Error A (Rojo) ! Error B (Rojo) Puerto Modbus.. Puerto Modbus Plus.. Figura 1. 11: Módulo 140NOM21100. 1.2.3.1.6. Módulo de Red Ethernet El módulo 140NOE77111 Ethernet TCP/IP permite al usuario acceder a datos desde el autómata mediante el protocolo Modbus/TCP estándar. Cualquier dispositivo, ya sea PC, paquete HMI, otro PLC o un dispositivo que use Modbus/TCP, puede acceder a los datos del PLC. El servidor Modbus/TCP también permite registrar paneles de programación en el autómata mediante Ethernet. Las características se describen a continuación:.
(29) 13. ! Corriente de bus requerida: 1000 mA. ! Puertos de comunicación: Puerto cable blindado trenzado 10/100Base-T (conector RJ-45); puerto 100Base-FX (conector MT-RJ). ! Software de programación: Concept versión 2.5 o superior o ProWORX NxT versión 2.2 o superior. ! Asignación automática de dirección IP y parámetros de la red.. Señalización luminosa. -Active (Verde) -Ready (Verde) -Fault (Rojo) -Run (Verde) -Link (Verde) -TxAct (Verde) -RxAct (Verde) -Kernel (Ámbar) -10MB (Verde) -100MB (Verde) -Fduplex (Verde) -Appl (Verde) -Coll (colisiones Ethernet) (Rojo). Conector Cable MT-RJ, 100Base-FX Conector RJ-45, 10/100Base-T. Figura 1. 12: Módulo 140NOE77111. 1.2.3.2. PLC Modicon Momentum Está constituido por un adaptador de procesador, donde reside la fuente de poder y el procesador, y de una base de entradas y salidas. Para el control de actuadores se utiliza dos tipos de bases, la 170ADM54080 y la 170ARM37030, y un adaptador de procesador 171CCC78010.. Figura 1. 13: TSX Momentum Base I/O y Adaptador..
(30) 14. 1.2.3.2.1. Adaptador de Procesador7 El Adaptador de procesador es la CPU donde se guarda y ejecuta un programa de aplicación y se controla los puertos de entrada/salida a través de un bus de comunicación común. El adaptador 171CCC78010 presenta las siguientes características: ! Memoria interna: 512 kbytes. ! Memoria de usuario18 k palabras. ! Flash RAM: 512 kbytes. ! Velocidad de reloj: 32 MHz. ! Puertos de comunicación: Modbus RS-232 (2) Modbus RS-485 (1) ! Indicadores LED (3): RUN (Verde) CPU recibe alimentación, resuelve lógica. COM ACT (Verde) actividad en el puerto Modbus.. Figura 1. 14: Adaptador Procesador 171CCC78010. 1.2.3.2.2. Base 170ADM540807 Esta base se la utiliza para el control de actuadores de las válvulas de entrada y salida de tanques, sus características se describen a continuación: ! Tipo de módulo: 6 entradas / 3 salidas, 120 Vac. ! Voltaje operación: 120 Vac. ! Rango frecuencia: 47-63 Hz. ! Corriente: 125 mA. ! Tiempo de respuesta de entradas: Máximo 1 ciclo de línea. ! Tiempo de respuesta de salidas: Máximo 0,5 de un ciclo de línea ! Puerto Modbus: 9.600, 19.200 Baudios; Paridad: Par, impar o ninguna. ! Modo/bits de datos: RTU de 8 bits, ASCII de 7 bits. ! Dirección Modbus: 0 a 247.
(31) 15. 1. Conector de interfaz interno (ATI). 2. Cierre y contacto de puesta a tierra para el adaptador. 3. LEDs de visualización de estado. 4. Cubierta de protección. 5. Sockets para conectores de terminales. 6. Tornillo de puesta a tierra. 7. Slot para montaje de barra de bus. 8. Pestaña de fijación para montaje del riel DIN. 9. Orificios para montaje del panel.. Figura 1. 15: TSX Momentum 170ADM54080. 1.2.3.2.3. Base 170ARM370307 Utilizada para el control de actuadores de las válvulas de carga y descarga en el patio de bombas. Sus características se detallan a continuación: ! Tipo de módulo: 24Vdc, 10 entradas binarias en un grupo, 8 salidas de relé como contactos de tipo normal abierto en dos grupos, cuatro puntos/grupo. ! Voltaje activo de entradas: +11 a +30 Vdc. ! Voltaje alimentación: 120 Vac. ! Rango frecuencia: 47-63 Hz. ! Corriente: Máximo 250 mA. ! Tiempo de respuesta de entradas: 2.2ms Off/On, 3.3ms On/Off ! Tiempo de respuesta de salidas: 10ms Off/On o viceversa.. 1. Conector de interfaz interno (ATI). 2. Cierre y contacto de puesta a tierra para el adaptador. 3. LEDs de visualización de estado. 4. Orificios para montaje del panel. 5. Tornillo de puesta a tierra. 6. Slot para montaje de barra de bus. 7. Pestaña de fijación para montaje del riel DIN. 8. Sockets para conectores de terminales.. Figura 1. 16: TSX Momentum 170ARM37030.
(32) 16. 1.2.4. TERMINAL GRÁFICA MAGELIS8 La terminal gráfica Magelis controla equipos como motores, variadores de velocidad, sistemas de identificación, entre otros, y ha sido desarrollada para el control, manejo, diagnóstico y ajuste de datos del PLC. La terminal gráfica XBT G ofrece las siguientes funciones: ! Visualización de sinópticos animados con 8 tipos de animación: pulsación sobre el teclado táctil, cambio de color, llenado, desplazamiento, rotación, tamaño, visibilidad, visualización del valor. ! Control y modificación de variables numéricas o alfanuméricas. ! Visualización de la fecha y la hora actuales. ! Visualización de alarmas, histórico y gestión de grupos de alarmas. ! Gestión de ventanas múltiples. ! Ejecución de páginas a iniciativa del usuario. ! Gestión de la aplicación en varios idiomas. ! Tratamiento de datos a través de scripts en Java. ! Soporte de la aplicación y los históricos en la tarjeta de memoria externa con formato “Compact Flash”. ! Gestión de mensajes sonoros. La terminal Magelis utilizada es la XBT-G 4330 y se encuentra montada en el cuarto de control de bombas y se conecta al PLC mediante Ethernet 10 Base-T, las características se detallan a continuación: 1. Bornero de alimentación: 24 VDC. 2. Interfaz de unidad de extensión. 3. Conector hembra SUB-D 25 (RS 232 C, RS 485). 4. Conector para cable de transferencia de aplicación. 5. Conector tipo centronics. 6. Emplazamiento para tarjeta Compact Flash. 7. Conector SUB-D 9. 8. Conector RJ-45 (Ethernet 10 Base-T). 9. Bornero I/O para conexión de altavoz.. Figura 1. 17: Terminal gráfica Magelis XBT-G 4330. (Vista posterior).
(33) 17. 1.2.4.1. Especificaciones Magelis XBT-G 4330 ! Alimentación: 24 Vdc. ! Consumo: 28 W. ! Temperatura Funcionamiento: 0 - 50 °C. ! Procesador: CPU 100 MHz RISC. ! Memoria: 8 Mb de Flash EPROM, 512 Kb de SRAM. ! Software de configuración: Vijeo Designer (Windows 2000, XP y Vista). ! Señalización: 1 LED, verde en funcionamiento normal, naranja si la retroiluminación es defectuosa. ! Pantalla LCD: Tipo Color TFT (Transistor de Película Delgada), 256 colores ! Resolución: 640 x 480 píxeles (VGA). ! Tamaño (ancho x altura en mm): 7,4" (149,8 x 112,3) ! Zona táctil: Película resistiva 32 x 24 células.. 1.2.5. CONTROLADOR ACCULOAD III 9 El Smith Meter Accuload III es un instrumento electrónico basado en microprocesadores, que se utiliza para regular el caudal y medir volumen de combustibles despachados. Puede programarse para manejar uno o dos brazos de carga, y también puede ser usado como un instrumento para la mezcla de diferentes productos. Los parámetros que definen el flujo por cada brazo de carga son programables a través del software AccuMate IIIX.. Figura 1. 18: Accuload III.
(34) 18. 1.2.5.1.. Especificaciones Accuload III. ! Operación con uno o dos brazos. ! Teclado pequeño de metal encapsulado, protegido contra el ambiente. ! Display de cristal líquido (LCD) con contraluz LED, 240x64 pixeles. ! Entradas/salidas configurables por el usuario. ! Entradas digitales: Cinco de 90 a 280 Vac, seis de 5 a 28 Vdc. ! Salidas digitales: Once de 90 a 280 Vac, tres de 24 Vdc. ! Control para la válvula de bloqueo con un control de lazo cerrado para llenado secuencial. ! Cuatro puertos de comunicación Ethernet 10/100 Base TRJ-45. ! Compensación automática por presión y temperatura así como corrección de densidad. ! Control de flujo automático con recuperación. ! Leguaje y mensajes programables. ! Procesamiento algebraico / boleano. ! Puede operar en modo stand/-alone (sin necesidad de sistemas remotos). ! Auto detección del Hardware instalado. ! Enclaustrada en caja a prueba de explosión.. 1.2.6. VÁLVULA DIGITAL ELECTRO-HIDRÁULICA10 Es una válvula gobernada por dos electroválvulas (solenoides), una normalmente abierta (NO) y una normalmente cerrada (NC), colocadas en la posición río arriba y río abajo, del lazo de control.. Figura 1. 19: Válvula digital Electro-Hidráulica modelo 210..
(35) 19. Energizando los dos solenoides, la presión corriente arriba es bloqueada permitiendo al fluido desahogarse corriente abajo, abriendo la válvula; si están desenergizados la presión río arriba del lazo cierra la válvula. Energizando únicamente la válvula solenoide NO, bloquea al fluido dentro de la tapa de la válvula y mantiene un flujo constante mientras las condiciones de operación no cambian. Si las condiciones de operación cambian el Accuload proporciona las señales adecuadas para ajustar el flujo.. Figura 1. 20: Modelo Esquemático. 1.2.6.1.. Especificaciones válvula modelo 210 de Smith Meter. ! Voltaje de los solenoides: 120 Vac +0% -15%, 50/60 Hz. ! Viscosidad Máxima: 200 SSU (40 mPa-s). ! Rango Temperatura: -20ºF a 150 ºF (-29ºC a 65 ºC). ! Máxima Presión de operación: 115 psig (793 kPa) ! Curva de control simple. ! Curva de control de válvulas de aislamiento. ! Baja caída de presión. ! Control de velocidad de apertura y cierre separado. ! Aplicaciones horizontales o verticales. ! Full rango de control de funciones opcionales. 1.2.7. MEDIDOR DE DESPLAZAMIENTO POSITIVO11 El medidor de desplazamiento positivo contiene un rotor que gira sobre rodamientos de bolitas e incluye álabes distribuidos en forma pareja. Al fluir el.
(36) 20. líquido a través del medidor, el rotor y los álabes giran alrededor de una leva fija, haciendo que estos se desplacen hacia afuera. El movimiento sucesivo de los álabes forma una cámara de medición de volumen exacto entre dos de los álabes, el rotor, la carcasa, y las tapas inferior y superior, el flujo pasa sin perturbaciones durante la medición. El medidor envía hacia el Accuload 200 pulsos por cada galón que ha pasado por él.. Figura 1. 21: Medidor Modelo F4-S1 1.2.7.1.. Especificaciones Medidor Desplazamiento.. ! Tasa de flujo continua: 600 GPM. ! Tasa de flujo intermitente: 720 GPM. ! Viscosidad máxima: 2000 SSU (400 mPa*s4). ! Temperatura: -29ºC a 65ºC. ! Presión de trabajo máxima: 150 PSI. ! Baja caída de presión. ! Registración positiva y exacta.. 1.3.. ESTRUCTURA DE LA RED DE COMUNICACIÓN. Para describir la estructura de la red de comunicación existente, se hará referencia a los protocolos de comunicación y la topología de la red..
(37) 21. 1.3.1. PROTOCOLOS DE COMUNICACIÓN Un protocolo de comunicación es un conjunto de reglas que permiten la transferencia e intercambio de datos entre los distintos dispositivos que conforman una red. La red industrial en el terminal el Beaterio está basada en tecnologías de arquitectura abierta, entre las cuales podemos distinguir: ! Señales discretas para el controlador Accuload III. ! Modbus para comunicación entre Actuadores y PLC’s Momentum (Patio de bombas y tanques). ! Modbus Plus para comunicación entre PLC’s (Quantum-Momentum, Quantum-TIO), y PLC con Variadores de Velocidad. ! Ethernet para la comunicación entre PC’s y PLC con Magelis.. 1.3.1.1.. Modbus12. Es un estándar interno que los controladores Modicon usan para el intercambio de mensajes, pueden comunicarse entre sí y con otros dispositivos sobre una variedad de redes. Las redes son accedidas por medio de puertos incorporados en los controladores o por adaptadores de red, o gateways. Los dispositivos se comunican usando la técnica maestro-esclavo, en la cual sólo el maestro puede iniciar transacciones. Los esclavos responden suministrando al maestro el dato solicitado, o realizando la acción solicitada en la petición. A esta forma de comunicación se conoce como el ciclo Pregunta–Respuesta.. Figura 1. 22: Estructura lógica MODBUS.
(38) 22. Los pórticos Modbus usan una interface de comunicación RS-232C que define los pines del conector, cableado, los niveles de la señal, la velocidad de transmisión y chequeo de paridad. Los controladores se comunican usando la técnica de par-apar, en la que cualquier controlador puede comenzar las transacciones con otros controladores del mismo nivel.. 1.3.1.2.. Modbus Plus12. Es un sistema de red de área local diseñado para aplicaciones de mando y supervisión industriales. Mantiene el protocolo de comunicación par-a-par en los diferentes niveles de la red. La red permite módulos de comunicación I/O distribuidos (DIO), en los que los controladores se comunican directamente con los subsistemas I/O. El bus de la red usa un solo cable o un cable dual. El cable dual aumenta la protección contra las fallas del cable o ruido que puede aparecer en cualquier corrida del cable, permitiendo que ante la presencia de un problema la comunicación continúe por el camino libre de errores. Hasta 32 dispositivos pueden conectarse directamente en el bus de red, que pueden extenderse hasta una longitud de 450 metros. Es posible emplear repetidores para extender la distancia del cable a su máximo de 1800 metros, y el número de nodos a su máximo de 64, a una taza de transferencia de datos de 1 Mbps con tecnología de transmisión RS-485.. 1.3.1.3.. Ethernet13. Ethernet es un estándar de redes de computadoras de área local, con acceso al medio por contienda CSMA/CD. ("Acceso Múltiple por Detección de Portadora con Detección de Colisiones"); es una técnica usada en redes Ethernet para mejorar sus prestaciones con velocidad de transmisión de 100 Mbps para una distancia máxima de 100m con cable UTP. La red utilizada es la tecnología de fastethernet 100BASE-TX..
(39) 23. 1.3.2. TOPOLOGIA DE LA RED El término topología se refiere a la forma en que está diseñada la red, bien físicamente rigiéndose de algunas características en su hardware, o bien lógicamente basándose en las características internas de su software. La red utilizada en la Terminal está formada por una topología mixta, de la siguiente forma: Una topología en estrella a través de Ethernet en el nivel de gestión, en la cual un switch interconecta varias PC’s ubicadas en el cuarto de control, que registran la operación del proceso de despacho de las diferentes islas de carga. Una topología de bus en los niveles de campo y control, en la cual se interconectan PLC’s y variadores a través de Modbus Plus, y actuadores con PLC’s Momentum a través de Modbus.. 1.3.2.1.. Topología en Estrella14. Es una red en la cual las estaciones están conectadas directamente a un punto central y todas las comunicaciones se han de hacer necesariamente a través de éste. Los dispositivos no están directamente conectados entre sí, además no permite tanto tráfico de información. Dada su transmisión, una red en estrella tiene un nodo central activo que normalmente tiene los medios para prevenir problemas relacionados con el eco. Se utiliza sobre todo para redes locales, la mayoría de las redes de área local que tienen un router, un switch o un concentrador siguen esta topología..
(40) 24. Figura 1. 23: Red en topología de estrella. 1.3.2.2.. Topología en Bus15. Se caracteriza por tener un único canal de comunicaciones denominado bus, troncal o backbone, al cual se conectan los diferentes dispositivos. De esta forma todos los dispositivos comparten el mismo canal para comunicarse entre sí. Una topología de bus es multipunto. Un cable largo actúa como una red troncal que conecta todos los dispositivos en la red. Los nodos se conectan al bus mediante cables de conexión y sondas. Un cable de conexión va desde el dispositivo al cable principal. Una sonda es un conector que, se conecta al cable principal, o se pincha en el cable para crear un contacto con el núcleo metálico.. Figura 1. 24: Red en topología de bus. En los planos 1 y 2 correspondientes a los Diagramas de Red del Anexo II, se muestra la estructura de la red implementada, indicando el tipo de topología y los protocolos de comunicación, así como también las direcciones y nombres de los equipos que intervienen en el proceso..
(41) 25. 1.4.. PRINCIPALES INCONVENIENTES DEL ACTUAL SISTEMA. Tomando como ejemplo el sistema de despacho de Diesel 2, éste se origina a partir de tres tanques de almacenamiento de combustible, el flujo requerido por los cinco brazos de carga se obtiene mediante tres electro-bombas, cuyos motores eléctricos, con arranque directo, son controlados por el PLC Quantum. El accionamiento de las bombas se realiza en correspondencia al número de brazo de carga en uso, de acuerdo a la siguiente tabla:. # Brazos en # Bombas uso accionadas 1. 1. 2. 1. 3. 2. 4. 2. 5. 3. Tabla 1. 4: Número de bombas en función del número de brazos de carga.. Como se puede observar, cuando 1, 3 o 5 brazos de carga están en uso, el caudal suministrado por los grupos de bombeo estaría en exceso, lo que origina pérdidas de energía, incrementos de presión en el sistema y, consecuentemente, golpes de ariete más fuertes cuando el despacho en algún brazo de carga termina. Otro inconveniente que se presenta es debido al arranque directo de los grupos de bombeo, ya que al no disponer de un sistema de arranque y parada suave, se producen golpes de ariete de mayor magnitud, que generalmente es la causa principal del deterioro de juntas de dilatación, válvulas y otros accesorios. Adicionalmente, y debido a que el funcionamiento de las bombas también obedece a su condición de “principal” (la que entra primero), lo cual es.
(42) 26. determinado a criterio del operador, no se tiene un control sobre el tiempo de operación de cada grupo, que permita planificar de mejor manera el mantenimiento, lo que podría ocasionar un desgaste prematuro del grupo de bombeo con mayor frecuencia de operación.. 1.5.. SOLUCION PROPUESTA. A fin de solucionar los inconvenientes antes mencionados, la Dirección Técnica del Terminal El Beaterio, plantea las siguientes modificaciones al sistema de bombeo: ! Regular el caudal de los grupos de bombeo en función de la necesidad de despacho, utilizando accionamientos de velocidad variable. ! Realizar el arranque y parada de los grupos de bombeo de manera gradual y controlada. ! Instalar contactores de “bypass” para el arranque directo de las bombas y para eventuales fallas de los variadores de velocidad. ! Distribuir equitativamente los tiempos de operación de los grupos, para ejecutar un plan de mantenimiento adecuado.. 1.6.. OBJETIVO DEL PROYECTO Y TRABAJOS A EJECUTAR. Con base a la propuesta descrita en el numeral anterior, el objetivo principal de este proyecto es diseñar e implementar el sistema de control, para regular el caudal en los brazos de carga de combustible Diesel 2 y Diesel Premium del Terminal Beaterio. Para cumplir con este objetivo y llevar a la práctica la solución propuesta, se ha planificado ejecutar, entre otros, los siguientes trabajos: ! Reconfigurar el sistema de fuerza de los grupos de bombeo, incorporando accionamientos de velocidad variable. ! Instalar un transmisor de presión, cuya medición constituirá el parámetro principal para ajustar la velocidad de los grupos de bombeo..
(43) 27. ! Diseñar la lógica de control que satisfaga los nuevos requerimientos de operación de los grupos de bombeo. ! Reprogramar el PLC Modicon Quantum ! Reconfigurar la HMI de la sala de control ! Reconfigurar la Interfaz de Operador “Magelis” ! Realizar pruebas del nuevo sistema y ponerlo en producción..
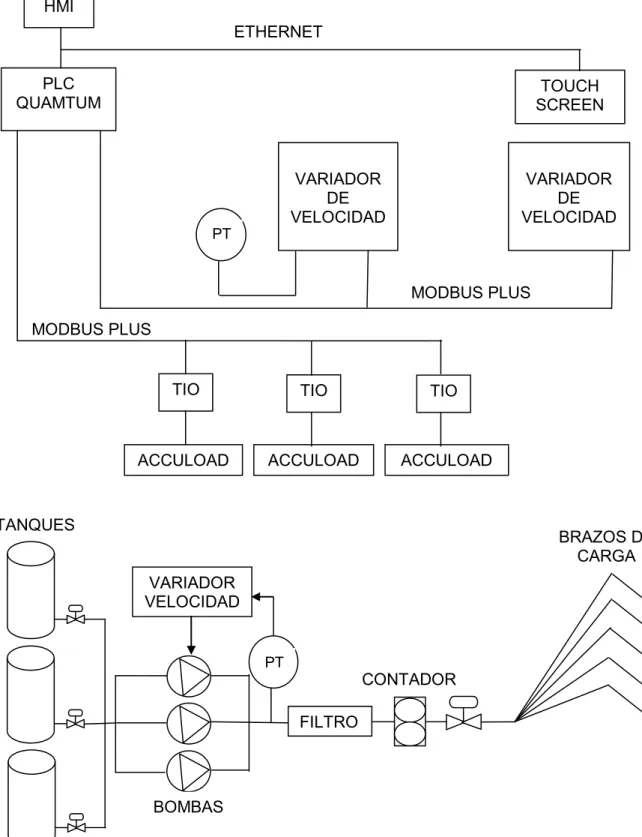
(44) 28. CAPITULO 2 DISEÑO DEL SISTEMA Para el diseño del sistema, se ha tomado en consideración la propuesta descrita al final del capítulo 1 y la nueva funcionalidad requerida para el sistema de control de los grupos de bombeo, que fue establecida en coordinación con el personal técnico del Terminal Beaterio. Como paso previo, fue necesario recopilar datos sobre caudal en los brazos de carga, tiempos de operación de bombas, estado de componentes y disponibilidad de equipos e instrumentos a ser instalados.. 2.1.. ESQUEMA GENERAL DE LA RED DE CONTROL. Y. GRUPOS DE BOMBEO En la figura 2.1 y en forma de bloques, se presenta el nuevo esquema de la red de control y de los grupos de bombeo,. en el que se han incorporado dos. variadores de velocidad y un transmisor de presión, con base a los cuales y a la reprogramación del PLC, se regulará el caudal de suministro hacia las islas de carga. En este esquema: ! El PLC controla toda la operación de los grupos de bombeo. ! La HMI ubicada en la sala de control y la Interfaz de Operador tipo Touch Screen ubicada en el centro de control de motores, además de permitir la visualización y monitoreo del proceso,. facilitan la modificación de. parámetros de control en el PLC. ! El transmisor de presión envía datos sobre la presión en la línea de descarga al PLC. ! Los variadores de velocidad reciben la señal de control del PLC para regular la velocidad y flujo de los grupos de bombeo. ! La transferencia de datos entre los distintos componentes del sistema se realiza a través de las redes Ethernet y Modbus Plus..
(45) 29. ! El montaje de las tres bombas, en forma paralela, se mantiene como estaba anteriormente, a diferencia de sus accionamientos eléctricos. HMI ETHERNET PLC QUAMTUM. TOUCH SCREEN. VARIADOR DE VELOCIDAD. PT. VARIADOR DE VELOCIDAD. MODBUS PLUS MODBUS PLUS. TIO. TIO. TIO. ACCULOAD. ACCULOAD. ACCULOAD. TANQUES. BRAZOS DE CARGA VARIADOR VELOCIDAD. PT. CONTADOR FILTRO. BOMBAS. Figura 2. 1: Esquema de la nueva red de control y grupos de bombeo..
(46) 30. 2.2.. DISEÑO DEL CIRCUITO ELÉCTRICO PRINCIPAL. En el nuevo sistema de fuerza se han instalado dos variadores de velocidad, existentes en la empresa, para accionar las electrobombas correspondientes al despacho de Diesel 2, contándose entonces con 3 grupos de bombeo que abastecen combustible a 5 brazos de carga y únicamente 2 variadores de velocidad; con base a lo cual se decidió configurar el nuevo sistema de la siguiente forma: ! Un variador de velocidad accionará a la bomba denominada bomba 15. ! El segundo variador accionará la bomba 13 o 14 de manera alternativa; configurando a una de ellas como principal o auxiliar 1 con caudal variable y de acuerdo al requerimiento de despacho (accionada por el variador), y la otra como auxiliar 2 a pleno caudal (con arranque directo). La condición de principal o auxiliares de estas bombas se cambiará de manera periódica. ! Se incluyen contactores de “bypass”, para el arranque directo de las bombas y para el caso de eventuales fallas en los variadores de velocidad. Para el despacho de Diesel Premium, el circuito de fuerza se mantiene como antes, ya que no hubo disponibilidad económica en la empresa para la adquisición de otros variadores de velocidad. En este caso, existen 3 contactores para el arranque directo de las 3 electrobombas, que serán controlados de manera secuencial por el PLC y de acuerdo al número de brazos de carga en actividad. En la figura 2.2 se muestra el diagrama eléctrico unifilar del circuito de fuerza correspondiente al despacho de Diesel 2. En el plano 3 del Anexo 1, se muestra el diagrama eléctrico principal en forma multifilar. En este circuito se tienen: ! Dos contactores (MC1 y MC2) para el accionamiento de las bombas 13 o 14 mediante el variador de frecuencia (BFC-4A). ! Dos contactores (BSM13 y BSM14) de “bypass”, para el arranque directo de las bombas 13 o 14..
(47) 31. ! Un contactor (MC3) para el accionamiento de la bomba 15 mediante el variador de frecuencia (BFC-3A). ! Un contactor (BSM15) de “bypass” para el arranque directo de la bomba 15. ! Elementos de protección contra cortocircuitos y sobrecargas.. Figura 2. 2: Diagrama eléctrico unifilar.. Los contactores ubicados a la salida de los variadores no deben desconectarse mientras estos estén energizados, ya que el sobrevoltaje transitorio de desconexión podría dañar los elementos electrónicos de potencia. Para garantizar esto, en el circuito de control se debe prever los interbloqueos correspondientes..
(48) 32. 2.2.1. ESPECIFICACIONES DE LOS EQUIPOS INCORPORADOS Para la selección de los equipos que se incorporaron al nuevo sistema, se consideraron las siguientes especificaciones:. 2.2.1.1.. Variadores de Velocidad. ! Tipo de motor: Trifásico de inducción rotor jaula de ardilla ! Potencia nominal del motor: 25 HP. ! Corriente nominal del motor: 29.9 A. ! Voltaje nominal del motor: 460 Vac, 60 Hz. ! Factor de servicio de motor: 1.15. ! Voltaje de entrada: 460 Vac, 60 Hz. ! Voltaje de salida: 0 - Un. ! Rango de frecuencia de salida: 0 - 60 Hz, ajustable. ! Ajuste de frecuencia: local y remoto. ! Tiempo de aceleración y desaceleración: 1 - 60 segundos, ajustables. ! Temperatura ambiente de 8°C a 30°C. ! Canal de Comunicación: Modbus Plus. ! Entradas digitales: Mínimo dos. ! Entradas análogas: Mínimo una.. 2.2.1.2.. Contactor Electromagnético. ! Tipo de corriente: Corriente alterna, 60 Hz. ! Voltaje de operación entre polos (Ue): Mayor o igual a 460 Vac. ! Número de polos: 3 ! Corriente nominal de operación (Ie): 30 A, categoría de empleo AC-3. ! Clase de servicio: Intermitente. ! Voltaje bobina (Uc): 460 Vac, 60 Hz. ! Contactos auxiliares: 2 normalmente cerrados y 2 normalmente abiertos..
(49) 33. 2.2.1.3.. Transmisor de Presión. ! Rango de Medición: 0 a 150 PSI. ! Alimentación: Mínimo 9 Vdc. ! Señal salida: 4 a 20 mA. ! Clase 1 División 2 (Líquidos o gases volátiles inflamables).. 2.3.. DISEÑO DEL CIRCUITO DE CONTROL. Para satisfacer los nuevos requerimientos de operación de los grupos de bombeo, el nuevo circuito de control está modificado sustantivamente respecto al anterior, debiéndose destacar los siguientes aspectos:. ! El control de 3 contactores adicionales, con los correspondientes relés de interposición, ubicados entre las salidas del PLC y las bobinas de estos contactores. ! Para el accionamiento de las bombas mediante variador de velocidad o por arranque directo, se deben cumplir las siguientes condiciones: !. El contactor de salida del variador y el de arranque directo no deben funcionar al mismo tiempo.. !. El contactor de salida del variador debe poder activarse solamente si el variador está energizado y listo para arrancar. De igual forma, este contactor solamente podrá desactivarse si el variador está desactivado.. ! Para cumplir con las condiciones antes descritas, tanto en el modo de operación Manual y Automático, se requirió agregar al circuito de control lo siguiente: !. Un selector de dos posiciones y un polo;. !. Dos pulsadores de marcha y paro;. !. Cuatro entradas adicionales en el PLC, dos por cada variador.. !. Las entradas digitales de los variadores;.
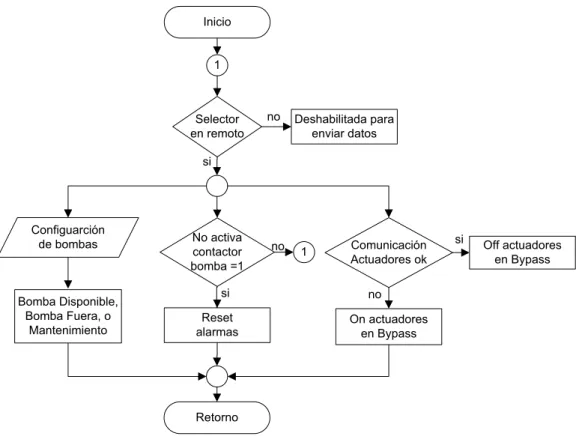
(50) 34. !. Bloqueos físicos entre los contactores que no deben funcionar simultáneamente; y,. !. Luces piloto para indicar el estado de los variadores, operativo o en falla.. En los planos 4 y 5 del Anexo I, se muestran los circuitos de control con todas las modificaciones realizadas; y en plano 6 del mismo anexo, el diagrama de conexiones de entradas y salidas al PLC.. 2.4.. DISEÑO Y DESARROLLO DEL SOFTWARE.. Este acápite hace referencia a dos aspectos importantes que son: ! El desarrollo de subrutinas y algoritmos de control que deben ser programados en el PLC Quantum, a fin de que los dispositivos de potencia actúen de acuerdo a la lógica y operación requeridas; y, ! La reconfiguración de la Interface Humano Máquina – HMI, ubicada en la sala de control, y de la Interfaz de Operador “Magelis”, para permitir el monitoreo y ciertas acciones de control sobre el nuevo sistema. Los paquetes de software que se utilizarán para este propósito son:. ! Concept 2.6 XL, para la programación del PLC. ! Intouch v.9.0 de Wonderware, para la reconfiguración de la HMI. ! Vijeo-Designer, para la reconfiguración de la Interfaz de Operador Magelis.. 2.4.1. PROGRAMACIÓN DEL PLC QUANTUM Para lograr una mayor comprensión y facilitar futuras modificaciones, el nuevo programa desarrollado en el PLC está estructurado por varias secciones de programa o subrutinas, interrelacionadas entre sí, en las cuales se ejecuta una.
Figure



+7



Documento similar
En un estudio clínico en niños y adolescentes de 10-24 años de edad con diabetes mellitus tipo 2, 39 pacientes fueron aleatorizados a dapagliflozina 10 mg y 33 a placebo,
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Administration of darolutamide (600 mg twice daily for 5 days) prior to co-administration of a single dose of rosuvastatin (5 mg) together with food resulted in approximately
A treatment effect in favour of luspatercept over placebo was observed in most subgroups analysed using transfusion independence ≥12 weeks (during week 1 to week 24),
El quincenario de los frailes de Filipinas, condena para el Archipiélago los propósitos de nivelación jurídica que para todo territorio español, peninsular o ultramarino, se
