Análisis mediante el método de Monte Carlo de filtros activos basados en variables de estado
78
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Análisis mediante el método de Monte Carlo de filtros activos basados en variables de estado Autor: Roberto Travieso Valdés [email protected]. Tutor: Dr. Rubén Orozco Morales [email protected]. Santa Clara 2015 "Año 57 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. ‘‘Seamos realistas y hagamos lo imposible’' Ernesto Che Guevara.
(5) ii. DEDICATORIA. A mis padres porque son el ejemplo que guía mi vida. A mis hermanas por apoyarme siempre. A mi familia, por ser tan especiales, por quererme siempre y confiar en mí. A mi novia que me ha brindado todo su apoyo y amor. A los que creyeron y a los que dudaron..
(6) iii. AGRADECIMIENTOS. A mis padres, quienes siempre han estado presentes y ahora también ven coronado un sueño. A mi familia por brindarme su apoyo incondicional A mi tutor porque sin su ayuda y conocimientos imprescindibles no hubiera sido posible este trabajo. A todos los profesores que han contribuido en mi formación hasta los días de hoy. A todas las personas que de una forma u otra me han ayudado a llegar hasta aquí..
(7) iv. Resumen.................................................................................................................................vi INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES. BASADAS EN VARIABLES DE ESTADO ......................................................................... 5 1.1. Utilización práctica de los filtros activos que emplean redes de variable de estado 5. Generalidades de las funciones de segundo orden .............................................................. 6 1.2. Variable de Estado ................................................................................................. 11. 1.2.1. Célula de Kerwin-Huelsman-Newcomb (KHN)............................................. 12. 1.2.2. Célula de Tow-Thomas (TT) .......................................................................... 14. 1.3. Pasos para el diseño de filtros activos basados en variables de estado .................. 15. 1.4. Herramientas Computacionales para el diseño y análisis de filtros activos........... 17. 1.4.1. MATLAB........................................................................................................ 17. 1.4.2. Multisim .......................................................................................................... 19. 1.4.3. Tina ................................................................................................................. 20. 1.5. Sensibilidad y Tolerancia ....................................................................................... 21. 1.6. Análisis de Monte Carlo......................................................................................... 22. CAPÍTULO 2.. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN. VARIABLES DE ESTADO ................................................................................................. 26 2.1. Diseño de los Filtros............................................................................................... 26. 2.1.1. Aproximaciones .............................................................................................. 27. 2.1.2. Escoger una configuracion circuital ............................................................... 30. 2.2. Diseño del experimento.......................................................................................... 32.
(8) v 2.3. Especificaciones ..................................................................................................... 35. CAPÍTULO 3.. EVALUACIÓN DE LOS MÉTODOS DE DISEÑO MEDIANTE. HERRAMIENTAS CAD ...................................................................................................... 36 3.1. Primera configuración de filtro .............................................................................. 36. 3.2. Segunda configuración de filtro ............................................................................. 45. 3.3. Tercera configuración de filtro............................................................................... 50. CONCLUSIONES Y RECOMENDACIONES ................................................................... 56 Conclusiones ..................................................................................................................... 56 Recomendaciones ............................................................................................................. 57 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 58 ANEXOS .............................................................................................................................. 60 Anexo I. Método para hallar las funciones de red y las ecuaciones de realización para. la red KHN basada en variable de estado a través del Simbolic Toolbox de MATLAB .. 60 Anexo II. Configuraciones de circuitos basados en variable de estado y sus. ecuaciones de diseño ideales............................................................................................. 65. .
(9) vi. Resumen. La tolerancia y las variaciones de los valores nominales de los componentes de un circuito afectan sus respuestas y comprometen su sensibilidad. Actualmente la confiabilidad de un dispositivo electrónico es un aspecto a no descuidar, dado que la tolerancia afecta tanto la calidad, como el costo de los circuitos electrónicos. Por la importancia que conlleva la variación de los valores de los componentes de un circuito debido a su tolerancia para el desempeño del circuito, se aborda el tema de analizar mediante el método de Monte Carlo filtros activos basados en variables de estado, específicamente las redes Kerwin-HuelsmanNewcomb y Tow-Thomas, así como la definición de sensibilidad y las principales características de herramientas computacionales útiles para el diseño y análisis de filtros activos. Se confirma la potencialidad de los métodos de computación simbólica, abordados con las herramientas de MATLAB, para el análisis de la sensibilidad de los filtros activos a la tolerancia de sus componentes. Se muestran las formas de diseño y simulación de los circuitos a través de softwares, Mutisim y Tina así como los procedimientos para determinar la sensibilidad de los parámetros de una respuesta del filtro ante las variaciones de uno de los componentes del mismo. Se utiliza además el análisis de peor caso para tener un acercamiento a las variaciones que sufren de los parámetros, así como para la comprobación experimental de los valores de sensibilidad..
(10) INTRODUCCIÓN Dado que el diseño ingenieril debe procurar la utilización de componentes tan baratos como se pueda sin comprometer el desempeño del circuito, ello obliga a decidir cuáles componentes son críticos y cuán baja es la tolerancia que estos requieren. Tal decisión es posible solo a través de un riguroso análisis de sensibilidad acompañado de análisis de tolerancia. Es por ello que el problema relacionado con sensibilidades y tolerancias se convierte necesario en el desarrollo de filtros activos, principalmente si estos serán producidos masivamente en serie. (Zumbahlen, 2003) Así las cosas, solo los componentes críticos utilizarán componentes de alta calidad y costosos, mientras que para los no críticos pueden destinarse los menos costosos y de mayor tolerancia. De esta manera se minimiza el costo al tiempo que se evita un desempeño inesperado del filtro. El análisis de Monte Carlo es un método ampliamente aceptado para determinar el comportamiento estadístico de alguna respuesta de un circuito ante variaciones de sus componentes. Al mismo tiempo, dado el carácter estocástico con que se hacen variar los valores de los componentes dentro de un conjunto finito de alternativas, no existe garantía de que cuando varíen simultáneamente todos los componentes estos conduzcan a situaciones extremas en la respuesta estudiada.(Yang, 2006) Los procedimientos descritos desde la perspectiva simbólica de MATLAB pueden sistematizarse para cualquier configuración de 2do orden de filtro activo con solo ligeras modificaciones que dependen de la forma que tenga la propia función de red en dependencia del tipo de respuesta de frecuencias del filtro. Por medio de métodos simbólicos puede partirse del planteamiento del sistema de ecuaciones de nodo del filtro (ver anexo 1) y determinar las soluciones para sus incógnitas, de las cuales se extrae la relación entre el nodo de salida y el de entrada. Disponiendo de la función de red pueden obtenerse, igualmente por métodos simbólicos, las ecuaciones de sus coeficientes y con ellas las de sus parámetros (z, p, Q y G), los cuales pueden ser evaluados para los valores de los componentes del circuito.
(11) INTRODUCCIÓN. 2. y determinar sus respuestas. Por el contrario, disponiendo de las ecuaciones de los parámetros puede utilizarse la vía simbólica para obtener las expresiones de realización que permiten obtener los valores de los componentes a partir de los valores de los parámetros que necesita la respuesta deseada. (Mandache et al., 2010), (Jurisic, 2014) De aquí que el problema científico de esta investigación sea: ¿Cómo influye en la respuesta de frecuencia de un filtro activo basado en variables de estado, la variación del valor de sus componentes? Para dar respuesta a este problema se declara como objetivo general: Evaluar la sensibilidad de filtros activos basados en variables de estado mediante métodos simbólicos y análisis de Monte Carlo. Para alcanzar este propósito se plantean los siguientes objetivos específicos: •. Establecer los referentes teóricos acerca del diseño de redes basadas en variables de estado.. •. Desarrollar el procedimiento para el diseño de filtros y la evaluación de su sensibilidad utilizando herramientas de computación simbólicas.. •. Describir las técnicas de obtención de las ecuaciones de análisis de la sensibilidad de los filtros activos basados en variables de estado utilizando herramientas de computación simbólicas.. •. Determinar la sensibilidad de los parámetros a la variación de los valores de los componentes dentro de un rango de tolerancia.. •. Utilizar herramientas CAD para verificar los métodos de diseño, así como para realizar análisis de Monte Carlo y caso extremo de los diseños realizados que validen los análisis de sensibilidad teórica.. Las tareas de investigación son las siguientes: • Estudio de los métodos actuales de análisis de filtros activos. • Familiarización con las herramientas computacionales que permiten el diseño y análisis de filtros activos. • Obtención de las funciones de red de filtros activos basados en variables de estado, así como las expresiones de diseño para su realización utilizando Matlab simbólico..
(12) INTRODUCCIÓN. 3. • Simulación de los diseños realizados en las diferentes herramientas computacionales y comparar resultados. • Análisis de los resultados obtenidos en las simulaciones en cuanto a la tolerancia y sensibilidad de los componentes en los filtros diseñados. Con este proyecto se pretende contribuir al desarrollo de métodos de análisis y síntesis de filtros activos basados en variables de estado utilizando modernas herramientas computacionales que hacen uso de métodos simbólicos y el diseño asistido mediante computadoras. Los resultados de la investigación poseen una aplicación práctica y teórica de gran trascendencia para todos los especialistas, investigadores y diseñadores puesto que en menor tiempo se puede determinar cuáles son los componentes que más se ajustan al circuito y cuáles son los que menos variación producen del resultado óptimo teniendo cierto margen de tolerancia. Se logra recopilar los resultados de una serie de publicaciones permitiendo así un fácil acceso a la información respecto al tema. Además los procedimientos utilizados son extensibles a otros tipos de circuitos. La memoria escrita se estructuró en tres capítulos. En el primer capítulo se presentan los referentes teóricos sobre las redes de tipo variable de estado, los métodos de aproximación y realización a base de estas redes, las propiedades de las funciones de red, así como los fundamentos del análisis de la sensibilidad aplicado a estas redes. En el segundo capítulo se expone qué redes y variantes serán analizadas, con qué herramientas computacionales se realizan los análisis, se fundamenta el porqué de las realizaciones y pruebas que se realizan, cómo realizar los diseños y su verificación por medio de las herramientas computacionales que se utilizan. El último capítulo. recoge los resultados de los análisis realizados, que incluyen la. verificación de la respuesta utilizando componentes exactos y componentes con un margen de tolerancia para evaluar el comportamiento de caso extremo, acompañado de análisis de Monte Carlo, con lo cual se verifica la sensibilidad de cada circuito..
(13) INTRODUCCIÓN. 4. Se incluye además las conclusiones del trabajo realizado, recomendaciones para trabajos futuros, la bibliografía utilizada, así como dos anexos con códigos en Matlab y variantes de circuitos basados en variables de estado..
(14) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. Hay infinidad de bibliografía que se refieren a los filtros de variable de estado y a sus configuraciones de circuitos, pero toda esta información está muy dispersa por lo que en este capítulo se recopila información sobre la utilización práctica que poseen estos filtros, principalmente las configuraciones de circuitos de Kerwin-Huelsman-Newcomb y TowThomas. También se muestran las generalidades de estos filtros así como por qué son de variable de estado. Se exponen los pasos que se siguen para su análisis y diseño aplicando herramientas computacionales que utilizan métodos simbólicos para facilitar estos fines. Por último se exponen las generalidades del cálculo de la sensibilidad de los componentes que conforman los circuitos y en qué consiste el análisis de Monte Carlo. 1.1. Utilización práctica de los filtros activos que emplean redes de variable de estado. La topología preferida para la realización de circuitos integrados notch (filtros de hendidura) de baja frecuencia utiliza un circuito Tow-Thomas que puede ser diseñado para los prerrequisitos Ganancia (G) y Factor de calidad (Q) independientemente, seleccionando dos resistores (Alzaher and Tasadduq, 2013). Además los tres amplificadores operacionales de esta topología tienen sus entradas no inversoras a tierra y por tanto sus entradas inversoras tendrán una tierra virtual. Estas características permiten el uso de amplificadores operacionales comunes. Para (Alzaher and Tasadduq, 2013) el circuito integrado de un filtro notch de baja frecuencia se implementa en un área de silicio relativamente pequeña con alta linealidad, por consiguiente promoviendo la utilización de técnicas de muy alta escala de integración (VLSI) en la instrumentación biomédica. De acuerdo a este autor, hay dos métodos de obtener el filtro notch a partir de los circuitos básicos de Kerwin-Huelsman-Newcomb (KHN) y Tow-.
(15) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 6. Thomas (TT), uno a partir de un cuarto amplificador operacional y el otro inyectando la señal de entrada en el nodo interno apropiado para producir la función notch requerida. La firma Burr-Brown comercializa desde hace varias décadas el circuito integrado UAF42, el cual es también producido por Texas Instruments con el mismo nombre. Este dispositivo integra una red de variables de estado tipo Kerwin-Huelsman-Newcomb con un cuarto amplificador operacional que permite la implementación de redes de hendidura (notch). Los filtros activos basados en variables de estado son también una de las configuraciones básicas que se utilizan en redes a base de convertidores de impedancia negativa, amplificadores de transconductancia controlados por corriente y convertidores de corriente (CCCCTAs) (Singh et al., 2010). Además, se ha reportado su utilización para la realización de redes que emplean amplificadores de transconductancia de corriente diferencial (CDTA) (Uygur et al., 2012). También se han publicado artículos donde se usa la configuración KHN para la realización de filtros de modo de corriente basados en amplificadores de transconductancia seguidores de corriente modificados (MCFTAs) (Satansup et al., 2011). Generalidades de las funciones de segundo orden Los filtros activos de orden superior se realizan preferiblemente mediante la cascada de secciones de segundo orden, siendo esta la principal motivación para el desarrollo de redes con propiedades especiales como lo son las obtenidas mediante variables de estado. De esta forma, las propiedades de un filtro de cualquier orden pueden generalizarse a partir de las propiedades de sus secciones de segundo orden. La función de red de 2do orden realiza un par de polos complejo-conjugados, y dependiendo del tipo de respuesta de frecuencias, un par de ceros imaginarios puro que pueden estar en infinito, en el origen, o a frecuencias intermedias, por lo que en el dominio de la frecuencias compleja. H(s) . N ( s) N ( s) 2 , ( s p1 )(s p1 *) s a1 s a0. (1.1). donde N(s) es un polinomio de 2do orden a lo sumo, p1 y su conjugado p1* son polos con parte real negativa (p1,2 = p jῶp), siendo a1 = 2p y a0 = p2 + ῶp2 = |p1|2. Puede utilizarse la forma.
(16) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. H(s) . N(s) s 2 2σ p s p1. 2. . N(s) ω s 2 p s ω p2 Q. 7. (1.2). Los parámetros:. p = | p1 | a0 Q =. p a0 1 a1 2 p. . Frecuencia natural del polo, y Factor de calidad del polo,. (1.3) (1.4). caracterizan completamente al par de polos y tienen semejante connotación que los de igual nombre en las redes resonantes LC. En función del factor de calidad y la frecuencia del polo, estos se localizan en. p1,2 = Gráficamente. p 2Q. j p 1 . 1 4Q 2. (1.5). --Para que los polos de una función de red de 2do orden puedan ser complejo – conjugados su Q > 0.5.-En la medida en que aumenta Q los polos se aproximan más al eje j. Secciones de 2do orden con polos de muy alta Q tienden a ser más inestables. El numerador de la función de red, N(s), es quien determina el tipo de respuesta de frecuencias (Orozco-Morales, 2015). Las características esenciales de una respuesta de frecuencia son:.
(17) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. Función de red Pasobajo (LP).. H(s) = . b0 p s2 s 2p Q. Ceros en .. Función de red Pasoalto (HP). b2s 2 p s2 s 2p Q Ceros en = 0 (doble).. H(s) =. . 8.
(18) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. Función de red Pasobanda (BP). b1s p s2 s 2p Q Ceros en = 0 e (simples).. H(s) =. . Función de red Notch. B(s 2 2 z) p s2 s 2p Q Ceros en z = p.. H(s) =. . 9.
(19) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. Función de red Pasobajo Notch (LPN). H(s) =. B( s 2 z2 ). . p. s p2 Q Ceros en c > p. s2 . Función de red Pasoalto Notch (HPN). H(s) =. B( s 2 z2 ) s2 . . p. s p2. Q Ceros en z < p.. 10.
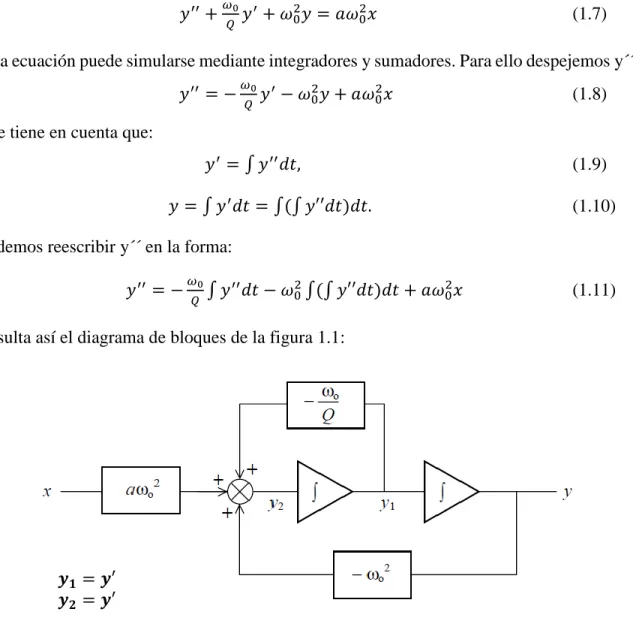
(20) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 1.2. 11. Variable de Estado. Los filtros de variable de estado se basan en la simulación analógica de la ecuación diferencial correspondiente. Consideremos la función bicuadrática 𝑌(𝑠) 𝑋(𝑠). =. 𝑎 1𝑠. 𝑠2. 1+𝑄𝜔 + 2 0 𝜔. (1.6). 0. La ecuación diferencial de la cual proviene esta se obtiene eliminando denominadores y tomando la transformada inversa de Laplace: 𝑦 ′′ +. 𝜔0 𝑄. 𝑦 ′ + 𝜔02 𝑦 = 𝑎𝜔02 𝑥. (1.7). Esta ecuación puede simularse mediante integradores y sumadores. Para ello despejemos y´´, 𝑦 ′′ = −. 𝜔0 𝑄. 𝑦 ′ − 𝜔02 𝑦 + 𝑎𝜔02 𝑥. (1.8). y se tiene en cuenta que: 𝑦 ′ = ∫ 𝑦 ′′ 𝑑𝑡, 𝑦 = ∫ 𝑦 ′ 𝑑𝑡 = ∫(∫ 𝑦′′𝑑𝑡)𝑑𝑡.. (1.9) (1.10). Podemos reescribir y´´ en la forma: 𝑦 ′′ = −. 𝜔0 𝑄. ∫ 𝑦 ′′ 𝑑𝑡 − 𝜔02 ∫(∫ 𝑦′′𝑑𝑡)𝑑𝑡 + 𝑎𝜔02 𝑥. Resulta así el diagrama de bloques de la figura 1.1:. 𝒚𝟏 = 𝒚′ 𝒚𝟐 = 𝒚′ Figura 1.1. Diagrama de bloques de un filtro de variable de estado.. (1.11).
(21) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 12. Observemos que: Y1=sY Y2=s2Y de donde: 𝑌1 (𝑠) 𝑋(𝑠). =. 𝑎𝑠 1𝑠. 𝑠2. 1+𝑄𝜔 + 2 0 𝜔. ,. (1.12). 0. 𝑌2 (𝑠) 𝑋(𝑠). =. 𝑎𝑠2 1𝑠. 𝑠2. 1+𝑄𝜔 + 2 0 𝜔. .. (1.13). 0. Esto significa que la misma estructura proporciona simultáneamente las tres funciones básicas: pasobajos, pasobanda, y pasoaltos, con los mismos 0 y Q, lo cual confiere a esta estructura una gran versatilidad. Mediante el uso de técnicas de feedforward pueden obtenerse también células que realicen funciones supresoras de banda, notch, y pasatodo. La denominación de filtros de variable de estado surge de que y e yl son las variables de estado del filtro visto como sistema de ecuaciones diferenciales. Existen diversas realizaciones con amplificadores operacionales para este tipo de estructura. En realidad, esta forma de simulación constituye históricamente una de las primeras aplicaciones de los amplificadores operacionales, aunque no en filtros activos propiamente dichos sino en computadoras analógicas. Analizaremos las configuraciones de circuito con variable de estado más usuales. 1.2.1 Célula de Kerwin-Huelsman-Newcomb (KHN) Conceptualmente surge de reacomodar los signos y las constantes en el diagrama de bloques anterior, de modo que los integradores puedan realizarse con la configuración usual con un amplificador operacional. El diagrama de bloques resultante es el que se muestra en la figura 1.2..
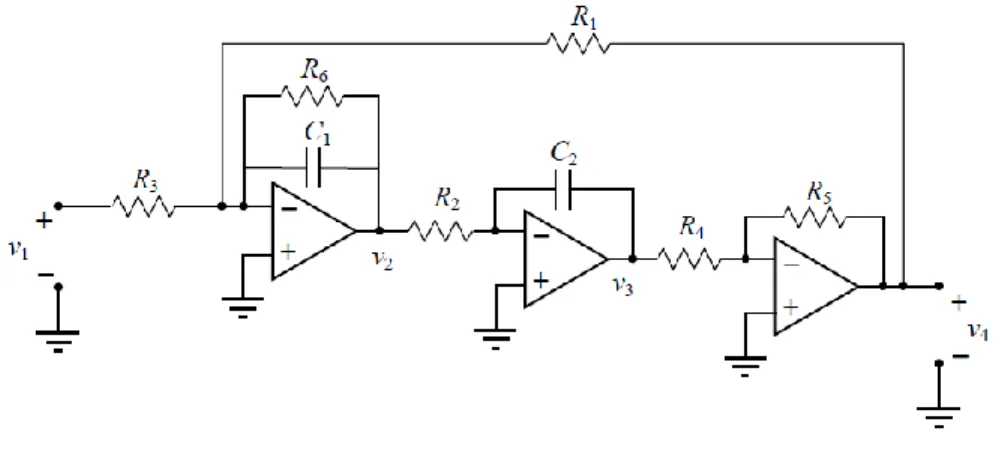
(22) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 13. Figura 1.2. Reestructuración del diagrama de bloques de la figura 1.1 para la implementación del filtro de variable de estado con integradores inversores.. Su función de transferencia: 𝑌(𝑠) 𝑋(𝑠). 𝐾1 2 𝑇1 𝑇2 𝑠 +𝐾2 𝑇2 𝑠+𝐾3. =. (1.14). Se tiene: 𝜔0 = √. 𝐾3 𝑇1 𝑇2. ,. 𝑄=. √𝑘3 𝐾2. 𝑇1. √𝑇. 2. (1.15). La realización de este diagrama, representada en la figura 1.3, utiliza integradores inversores y un sumador algebraico (es decir, con coeficientes de ambos signos) implementados con amplificadores operacionales. Las ecuaciones de diseño ideales son:. 𝜔0 =. 1 𝑅. √𝑅4 𝑅1 𝐶1 𝑅2 𝐶2. ,. (1.16). 5. 𝑅. 𝑄=. √𝑅4 𝑅1 𝐶1 𝑅2 𝐶2. 5 𝑅5 𝑅6 𝑅 (1+ ) 4 𝑅 𝐶 𝑅3 //𝑅4 𝑅5 𝑅6 +𝑅7 2 2. 𝑉4 (𝑗0) 𝑉1 (𝑗0). =−. 𝑅4 𝑅3. .. ,. (1.17). (1.18). Esta configuración es inversora. También son posibles las configuraciones no inversora y diferencial..
(23) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 14. Figura 1.3. La célula de Kerwin-Huelsman-Newcomb (KHN) para implementar funciones bicuadráticas.. Las sensibilidades de 0 respecto a los elementos pasivos son 1/2 y las de Q son todas inferiores a 1 en valor absoluto. 1.2.2. Célula de Tow-Thomas (TT). En la célula KHN se requería un sumador algebraico debido a que las dos realimentaciones se hacían mediante coeficientes de signo opuesto (lo cual no significa que alguna de las realimentaciones sea positiva). Puede simplificarse el circuito haciendo que la realimentación interna se efectúe después del inversor de entrada, aprovechando el nudo sumador de corrientes del integrador. El circuito así modificado es el indicado en la figura 1.4.. Figura 1.4. La célula de Kerwin-Huelsman-Newcomb modificada para evitar el uso de un sumador algebraico..
(24) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 15. La célula de Tow-Thomas (figura 1.5), constituye una leve redistribución del circuito anterior.. Figura 1.5. La célula de Tow-Thomas (TT) para implementar funciones bicuadráticas.. Las ecuaciones de diseño ideales son:. 𝜔0 = 𝑄=. 1 𝑅 √𝑅4 𝑅1 𝐶1 𝑅2 𝐶2 5. 𝑅6 𝑅1. 𝑉4 (𝑗0) 𝑉1 (𝑗0). 𝑅5 𝑅1 𝐶1. √𝑅. 4 𝑅2 𝐶2. ,. ,. 𝑅. = − 1. 𝑅3. (1.19). (1.20) (1.21). Al tener todos los terminales (+) a tierra se minimizan los problemas debidos al factor de rechazo y se reduce la cantidad de elementos del circuito que intervienen en la definición de Q. Por otra parte la función pasobajo se obtiene simultáneamente en forma inversora y no inversora, en V4 y en V3 respectivamente. Finalmente, el valor de Q es proporcional a una resistencia, R6. Frente a estas ventajas, esta célula presenta la desventaja de no permitir obtener la salida pasoaltos (Miyara, 2004). 1.3. Pasos para el diseño de filtros activos basados en variables de estado. Todos los dispositivos digitales modernos (ej. celulares, MP3, etc.) utilizan filtros de señal analógica previo a la conversión A/D y/o posterior a la conversión D/A..
(25) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 16. Las funciones de aproximación para filtros analógicos permiten, a partir de unas especificaciones de diseño deseadas, obtener la función de red, H(s), a realizar posteriormente mediante un circuito eléctrico. Existen varios softwares que tienen programados diversos métodos de aproximación, por lo que el problema actual de los ingenieros es dominar la esencia del proceso de aproximación y saber las cualidades de cada uno de los métodos disponibles. Con la normalización del eje de frecuencias, el problema de la aproximación se sistematiza en los pasos siguientes: I. Definir las especificaciones (plantilla) de diseño. . Tipo de respuesta de magnitud – frecuencias, valores de las frecuencias esquinas y magnitud deseada en ellas.. II. Normalizar el eje de frecuencias. . Obtener la plantilla prototipo pasobajo.. III. Cálculo de la función de red prototipo. . Obtener una H(sx) que satisfaga las especificaciones del filtro prototipo.. IV. Desnormalización de frecuencias.(Orozco-Morales, 2014) . Obtener la H(s) que responda al tipo de respuesta de frecuencias deseada.. Cualquier configuración de 2do orden puede ser utilizada realizando alguno o todos los pasos siguientes: I. Plantear el sistema de ecuaciones de nodo del circuito. II. Aplicar métodos simbólicos para obtener la función de red del circuito. III. A partir de la función de red del circuito obtener las expresiones de su p, Q, z y K en función de los componentes. IV. Decidir cuales componentes del circuito son variables independientes (asumiendo sus valores) y cuales dependientes..
(26) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 17. V. Determinar por métodos simbólicos las expresiones de realización de los componentes que son variables dependientes en función de los valores de p, Q, z y K, así como de los componentes independientes.(Orozco-Morales, 2015) 1.4. Herramientas Computacionales para el diseño y análisis de filtros activos. Se han desarrollado diversas herramientas computacionales para el diseño y análisis de filtros activos y aunque son confiables y excelentes para llevar a cabo los diseños utilizados en este trabajo, no todas son de acceso gratuito, por lo que se emplean los softwares al alcance. 1.4.1 MATLAB Dentro de las herramientas computacionales que más aceptación logran por sus posibilidades en computación simbólica se encuentran MATLAB y Mathematic. MATLAB es un entorno de cálculo técnico de altas prestaciones para cálculo numérico y visualización. Integra: . Análisis numérico.. . Cálculo matricial.. . Procesamiento de señales.. . Gráficos.. En un entorno fácil de usar, donde los problemas y las soluciones pueden expresarse como se escriben matemáticamente, sin la programación tradicional. El nombre MATLAB proviene de ``MATrix LABoratory'' (Laboratorio de Matrices). MATLAB fue escrito originalmente para proporcionar un acceso sencillo al software matricial desarrollado por los proyectos LINPACK y EISPACK, que juntos representan lo más avanzado en programas de cálculo matricial. MATLAB es un sistema interactivo cuyo elemento básico de datos es una matriz que no requiere dimensionamiento. Esto permite resolver muchos problemas numéricos en una fracción del tiempo que llevaría hacerlo en lenguajes como C, BASIC o FORTRAN. MATLAB ha evolucionado en los últimos años a partir de la colaboración de muchos usuarios. En entornos universitarios se ha convertido en la herramienta de enseñanza estándar para cursos de introducción en álgebra lineal aplicada, así como cursos avanzados en otras áreas..
(27) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 18. En la industria, MATLAB se utiliza para investigación y para resolver problemas prácticos de ingeniería y matemáticas, con un gran énfasis en aplicaciones de control y procesamiento de señales. MATLAB también proporciona una serie de soluciones específicas en diversas cajas de herramientas (TOOLBOXES). Estas son muy importantes para la mayoría de los usuarios de MATLAB ya que extienden el entorno para resolver clases particulares de problemas como: . Procesamiento de señales.. . Diseño de sistemas de control.. . Simulación de sistemas dinámicos.. . Identificación de sistemas.. . Redes neuronales y otros.. Entre estas funciones se encuentran: SIGNAL PROCESSING TOOLBOX MATLAB tiene una gran colección de funciones para el procesamiento de señal en el Signal Processing Toolbox. Este incluye funciones para: . Análisis de filtros digitales incluyendo respuesta en frecuencia, retardo de grupo, retardo de fase.. . Implementación de filtros, tanto directo como usando técnicas en el dominio de la frecuencia basadas en la (transformada rápida de Fourier) FFT.. . Diseño de filtros IIR (Infinite Impulse Response o Respuesta infinita al impulso), incluyendo Butterworth, Chebyschev tipo I, Chebyshebv tipo II y elíptico.. . Diseño de filtros FIR (Finite Impulse Response o Respuesta finita al impulso) mediante el algorítmo óptimo de Parks-McClellan.. . Procesamiento de la FFT, incluyendo la transformación para potencias de dos y su inversa, y transformada para no potencias de dos.. SYMBOLIC MATH TOOLBOX El Symbolic Math Toolbox sale al mercado desde la versión 6 de MATLAB al introducir las capacidades de programación sintáctica de Maple, pero ampliando las posibilidades de este con las numéricas y gráficas que distinguen a MATLAB. En 2008 Mathworks compró MuPAD, siendo a partir de entonces la caja de herramientas simbólicas de MATLAB..
(28) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 19. Actualmente el Symbolic Math Toolbox se encuentra en su versión 3, el cual además de poder resolver sistemas de ecuaciones, puede también realizar otros cálculos simbólicamente, tales como integración, diferenciación, simplificación de funciones, cálculo de transformadas de funciones (ej. Laplace y Fourier) (MathWorks, 2002). Muchas de estas posibilidades son las que han permitido retomar el análisis de la sensibilidad y la tolerancia de configuraciones de filtros activos desde la poderosa y retadora perspectiva simbólica. El reto no radica en saber utilizar las herramientas simbólicas, sino en dominar los principios ingenieriles subyacentes en el problema donde esta se aplica. (Orozco-Morales and Moreno-Campdesuñer, 2015) Probablemente la característica más importante de MATLAB es su capacidad de crecimiento. Esto permite convertir al usuario en un autor contribuyente, creando sus propias aplicaciones. En resumen, las prestaciones más importantes de MATLAB son: . Escritura del programa en lenguaje matemático.. . Implementación de las matrices como elemento básico del lenguaje, lo que permite una gran reducción del código, al no necesitar implementar el cálculo matricial.. . Implementación de aritmética compleja.. . Un gran contenido de órdenes específicas, agrupadas en TOOLBOXES.. . Posibilidad de ampliar y adaptar el lenguaje, mediantes ficheros de script y funciones .m.. 1.4.2 Multisim Multisim es una aplicación de captura esquemática y simulación del conjunto de diseño de circuito de National Intruments, un conjunto de herramientas de EDA (Electronics Design Automation) que asisten en los principales pasos para el diseño del circuito, aunque limitado a muy pocas configuraciones de filtros, por lo que no incluye las variables de estado. Incorpora SPICE3F5 y XSPICE al núcleo de su motor de simulaciones, con mejoras diseñadas por Electronics Workbench específicamente para optimizar el desempeño de los análisis con simulaciones digitales y mixtas. SPICE3F5 y XSPICE son estándares aceptados en la industria de domino público. SPICE3F5 es una edición de SPICE (Simulation Program with Integrated Circuit Emphasis) diseñada por la Universidad de California en Berkeley..
(29) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 20. XSPICE es un set de mejoras únicas echas a SPICE, bajo contrato de las Fuerzas Armadas de Estados Unidos, que incluye un modo mixto de simulación evento-consecuencia y un subsistema extensible de modelaje de usuario final. Electronic Workbench ha mejorado los núcleos con algunas características de compatibilidad no SPICE – estándar PSPICE, para permitir el uso de un amplio rango de modelos atípicos de SPICE. Multisim también ofrece una amplia gama de análisis, entre los que se encuentran Monte Carlo, Fourier, de ruido, se sensibilidad, del peor caso, etc. Para la comprobación y análisis del circuito, nos provee de varios instrumentos de medición virtuales. Estos se conectan, usan y leen igual que sus equivalentes reales. Usando instrumentos virtuales es la vía más fácil de examinar el comportamiento del circuito.(National-Instruments, 2007) 1.4.3 Tina Tina TI es un software realizado por Texas Instruments y Designsoft y una herramienta más ligera que Tina Design Suite. Es una potente herramienta de simulación de circuitos que es ideal para la simulación de circuitos analógicos y circuitos de fuente conmutadas. Este software basado en simulador SPICE tiene una poderosa capacidad de análisis, una intuitiva y simple interfaz gráfica. TINA es un poderoso y costeable paquete de software para analizar, diseñar y simulación a tiempo real de circuitos analógicos, digitales, VHDL y mixtos. Se puede también analizar radiofrecuencias, comunicaciones y circuitos optoelectrónicos, y probar y depurar aplicaciones de microprocesadores y microcontroladores. Para los ingenieros Tina es un software de uso fácil y una herramienta de alto rendimiento, mientras que los educadores lo optan por sus características únicas para el ambiente favorable a la enseñanza. Empezando v7, Tina está distribuida en dos versiones mayores – Tina v7 y Tina Design Suite v7. Tina v7 incluye solo simulación de circuitos, mientras que Tina Design Suite v7 incluye además el diseñador avanzado bloques de circuitos integrados, PBC, (Printed Circuit Board). Este módulo de trazado integrado tiene todas las características que se necesitan para el diseño avanzado de PCB, incluyendo un Bloque de Control de Procesos multicapas. Tina puede ser también utilizada en su ambiente de entrenamiento. Este incluye una herramienta única para hacer probar el conocimiento de los estudiantes, monitoreando el progreso e introduciendo técnicas de localización de fallas. (DesignSoft, 2006).
(30) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 1.5. 21. Sensibilidad y Tolerancia. Debido a la tolerancia, el envejecimiento, la temperatura y otros factores, el valor de los componentes de un filtro activo dista del valor exacto necesario para brindar determinada respuesta; como resultado, la verdadera respuesta de un filtro se desvía de la que tendría si empleara componentes exactos todo el tiempo. Como una forma de predecir tal desviación los ingenieros utilizan el concepto de sensibilidad, siendo una figura de mérito de cada configuración de circuito utilizada como elemento de comparación entre distintas redes a la hora de seleccionar la más adecuada para un fin determinado, o para saber qué componentes deben seleccionarse con mejor calidad pues influyen más en el desempeño esperado. Consumar el diseño de un filtro incluye garantizar, con mínimo costo de producción, todas sus respuestas, tanto de frecuencias como transitorias. Debe tenerse en cuenta que después de escoger la configuración apropiada para el circuito del filtro, lo antes mencionado está muy estrechamente relacionado con el precio de los componentes en el mercado, pues se fabrican con un valor de venta medio para su principal parámetro (ej. resistencia o capacitancia) y cierta tolerancia. Menor tolerancia requiere mayor seguridad tecnológica durante su producción, lo cual involucra incremento en el costo del componente y viceversa. Adoptar una posición filosóficamente opuesta, en la que se acepte que los componentes puedan tener cualquier tolerancia y entonces traten de encontrar configuraciones de circuitos que sean lo más insensibles posible a las variación de los componentes no ha llevado hasta ahora a resultados aceptables. (Orozco-Morales and Moreno-Campdesuñer, 2015) Definición Se supone una característica P de un circuito que depende de un cierto parámetro x. Dicha característica dependerá también, normalmente, de la frecuencia s por lo que se puede poner P = P(s,x). La desviación en P causada por un error dx = x x0 de x se puede obtener mediante el desarrollo de Taylor alrededor del valor nominal x0: 𝑃(𝑠, 𝑥) = 𝑃(𝑠, 𝑥0 ) +. 1 𝜕2 𝑃(𝑠,𝑥). 𝜕𝑃(𝑠,𝑥) 𝜕𝑥. | 𝑑𝑥 + 2 𝑥0. 𝜕𝑥 2. | (𝑑𝑥)2 +. .. 𝑥0. (1.22).
(31) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. Si asumimos que. 𝑑𝑥 𝑥0. 22. ≪ 1 y que la curvatura de P(s,x) cerca de x0 no es demasiado grande,. podemos despreciar los términos del desarrollo a partir de la segunda derivada, con lo que: ∆𝑃(𝑠, 𝑥0 ) = 𝑃(𝑠, 𝑥0 + 𝑑𝑥) − 𝑃(𝑠, 𝑥0 ) ≈. 𝜕𝑃(𝑠,𝑥) 𝜕𝑥. |. 𝑥0. 𝑑𝑥. (1.23). La mayor parte de las veces no se está tan interesado en cambios absolutos (ΔP) originados por cambios de x (dx = x x0) sino en los cambios relativos, es decir: ∆𝑃(𝑠,𝑥0 ). ≈. 𝑃(𝑠,𝑥0 ). 𝑥0. 𝜕𝑃(𝑠,𝑥). 𝑃(𝑠,𝑥0 ). 𝜕𝑥. |. 𝑑𝑥. (1.25). 𝑥0 𝑥0. donde:. 𝑆𝑥𝑃 =. 𝑋0. 𝜕𝑃(𝑠,𝑥). 𝜕𝑃 ⁄𝑃. 𝑃(𝑠,𝑥0 ). 𝜕𝑥. 𝑥0 𝜕𝑥 ⁄𝑥 𝑥0. |. |. =. 𝑑(𝐿𝑛 𝑃). |. 𝑑(𝐿𝑛 𝑥) 𝑥 0. (1.26). es la sensibilidad de P a un pequeño cambio en x. Por tanto la sensibilidad se define: 𝑥 𝜕𝑃(𝑠,𝑥). 𝑆𝑥𝑃 = 𝑃. 𝜕𝑥. 𝑑(𝐿𝑛 𝑃). = 𝑑(𝐿𝑛 𝑥)| 𝑥0. (1.27). Para pequeñas variaciones de x: ∆𝑃 𝑃. = 𝑆𝑥𝑃. ∆𝑥 𝑥. (1.28). que nos indica la variabilidad (cambio porcentual o relativo de P debido a un determinado cambio porcentual o relativo de x). Se observa por tanto, que los mejores circuitos serán aquellos que presenten menores sensibilidades a sus componentes. Si S es pequeña podrán utilizarse componentes con ∆𝑃. tolerancias mayores sin que ello produzca grandes variaciones de la respuesta deseada ( 𝑃 ) y dichos componentes serán más baratos.(Mandache et al., 2010) 1.6. Análisis de Monte Carlo. Generalmente el análisis de la sensibilidad y la tolerancia es un trabajo arduo y no está exento de errores numéricos o incorrecta interpretación de los resultados. Una alternativa muy.
(32) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 23. utilizada por muchas herramientas para la simulación y análisis de circuitos (ej. PSpice, TinaTI, Multisim, etc) ha sido el análisis de Monte Carlo basado en hacer variar aleatoriamente los valores de todos o alguno de los componentes del circuito dentro de su rango de tolerancia y para cada caso, determinar una versión de la respuesta en estudio. Por otra parte, con el advenimiento de herramientas computacionales como el MATLAB simbólico puede realizarse este análisis evitando posibles errores y facilitando el trabajo, lo cual permite reservar el mayor esfuerzo a la interpretación de los resultados. Análisis de Monte Carlo de la respuesta de magnitud-frecuencias para las variaciones de un componente del filtro La sensibilidad de un parámetro de la función de red de un circuito (ej. z, p, Q y G) a la tolerancia de alguna componente, en la forma vista anteriormente, devuelve un valor numérico que no expresa cómo varían las respuestas de interés del filtro (ej. respuestas de frecuencia o transitorias) ante la tolerancia de alguno o varios componentes en caso de que puedan modificar sus valores cualquiera de estos simultáneamente. Es por ello que ha sido una práctica el análisis de Monte Carlo de las respuestas del filtro ante las variaciones de los valores de sus componentes a causa de la tolerancia. El análisis de Monte Carlo, también denominado en la literatura en lengua inglesa como Statistic Analogical Experiment Analysis o también Random Analogy Analysis hace variar aleatoriamente dentro de un intervalo, a los valores de los componentes de interés en el circuito y determina el conjunto de respuestas que estas variaciones producen. Por tanto, es un método estadístico de análisis que calcula la respuesta de un circuito cuando los parámetros del mismo varían aleatoriamente. Para ello utiliza múltiples cálculos numéricos de la respuesta a analizar basándose en la teoría de las probabilidades para asignar valores a los componentes del circuito de acuerdo a alguna distribución estadística que se especifique y dentro de su margen de tolerancia. Con el análisis de Monte Carlo puede realizarse un análisis estadístico de las respuestas logradas, pudiendo determinarse el comportamiento medio, las respuestas extremas, confeccionar histogramas de los resultados, etc. No obstante, su seguridad está limitada por el tiempo de cálculo o por el monto de variantes a calcular, mientras más variantes más confianza en los resultados, por lo que generalmente se efectúan.
(33) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 24. cientos o miles de corridas para poder arribar a resultados con mayor nivel de confianza. (Shujuan et al., 2005, Erdei, 2007, Fitzpatrick, 2012) El análisis de Monte Carlo forma parte de las opciones de muchas herramientas para simulación y análisis de circuitos como Tina-TI y PSpice (MultiSim). Muy importante es saber relacionar el resultado de un cálculo teórico de la sensibilidad con el resultado práctico que debe producir un circuito. El análisis de Monte Carlo generalmente se realiza variando aleatoriamente uno o varios componentes pasivos del circuito; no obstante, puede aplicarse cuando se desea conocer las variaciones que se producen en un parámetro de la respuesta del circuito ante las variaciones de alguno de sus componentes. El análisis de Monte Carlo es un método costoso pues se basa en múltiples simulaciones que se realizan repetidamente. Ello se debe a que es un método basado en la estadística, lo cual hace que necesite de varios cientos, o tal vez miles, de muestras para arribar a resultados estadísticamente aceptables. Mientras más simulaciones mayor precisión en los resultados, principalmente cuando se desean determinar parámetros estadísticos de las respuestas obtenidas, tales como valor medio, varianza, etc. Teóricamente, si N es el número de simulaciones o respuestas del filtro ante N combinaciones de variaciones aleatorias de sus componentes, las N respuestas obtenidas definen el área esperada de la verdadera respuesta. (Hayes et al., 2010) Es por ello que el análisis de Monte Carlo demanda un alto esfuerzo computacional y tiempo de cálculo, lo cual ha conducido a que recientemente se hayan encontrado alternativas más eficientes basadas en el análisis de valores extremos de tolerancia (WCTA: worst-case tolerance analysis), los diagramas de decisión determinante (DDD: Determinant Decision Diagrams) (Palma-Rodriguez et al., 2012) o los algoritmos simbólicos (Mandache et al., 2010), destinándose fundamentalmente el análisis de Monte Carlo para condiciones en los que no se dispone de un modelo matemático del circuito (Shujuan et al., 2005). No obstante, actualmente muchas herramientas para simulación y análisis de circuitos (ej. Multisim, TinaTI, etc.) ofrecen la posibilidad del análisis de Monte Carlo. Por ejemplo, para realizar el análisis de la sensibilidad de un parámetro (ej. f0) a una componente individual debe asignarse diversos valores a esta (como parámetro variable) y determinar para cada valor de la.
(34) CAPÍTULO 1. REFERENTES TEÓRICOS ACERCA DEL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 25. componente el valor medio del parámetro en el análisis de Monte Carlo para luego calcular. (Raut and Swamy, 2010) En particular el método WCTA, que busca determinar los márgenes de tolerancia en los componentes que aseguran que los límites máximo y mínimo de una respuesta del filtro no sobrepase determinado margen de desempeño, adolece de la incertidumbre debida a que es difícil predecir cuál es la combinación de valores extremos de los componentes que conduce al peor caso en el desempeño de un circuito, principalmente cuando el WCTA se acomete mediante análisis de Monte Carlo (Kolev, 2002). La razón de ello radica en que los análisis de peor caso se sustentan en la idea de que si todos los componentes del circuito asumen simultáneamente sus valores máximos y mínimos (extremos) dentro de sus respectivas tolerancias es posible que las respuestas logradas sean el peor caso. Como quiera que sea, encontrar las condiciones para la peor variante es todo un reto. Al efecto se han publicado algunos trabajos como los de (Hayes et al. (2010)) basados en el uso de valores singulares estructurados a partir de la teoría del control robusto que tiene la ventaja de determinar el peor caso basado en repeticiones pero no de forma estadísticas, sino en un procedimiento equivalente a los análisis de estabilidad de sistemas. Si bien el método tiene su potencialidad requiere de sólidos conocimientos de teoría del control y de la aplicación de espacios de estado para su aplicación. Conclusiones del capitulo Para concluir podemos alegar que las redes de circuitos basadas en variable de estado, KHN y TT, tienen gran variedad de aplicaciones prácticas en el diseño y fabricación de circuitos integrados, como el UAF42 y otros basados en CCCCTAs, CDTA y MCFTAs. Además, gracias a sus propiedades de tener varias salidas con una sola entrada (SIMO), facilitan el diseño y análisis de circuitos mediante herramientas computacionales, por ejemplo en el caso de KHN se pueden analizar las salidas pasobajo, pasabanda y pasoalto a la misma vez, teniendo todas los mismos parámetros de diseño, wp, Q, G y wz. Se concluye también que los análisis de sensibilidad y Monte Carlo son vitales a la hora de diseño o fabricación de circuitos, pues a través de ellos podemos tener en cuenta las afectaciones que pueden llegar a sufrir las respuestas debido a las variaciones de sus componentes, ya sea por su tolerancia o envejecimiento y deterioro..
(35) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. Para el diseño de los filtros de variable de estado Kerwin-Huelsman-Newcomb y TowThomas pueden encontrarse ecuaciones simplificadas en algunos manuales de diseño; no obstante, la utilización de herramientas computacionales como MATLAB permite utilizar métodos rigurosos de diseño a partir del planteamiento del sistema de ecuaciones del circuito. En este capítulo se desarrolla el procedimiento completo de diseño de filtros a variable de estado para las redes mencionadas, se especifican las herramientas computacionales que se utilizan tanto para la realización como para la simulación de los filtros, así como el procedimiento que debe seguirse para la verificación del diseño y la evaluación de la sensibilidad de los filtros. 2.1. Diseño de los Filtros. El procedimiento para el diseño de los filtros de variable de estado seguido en este trabajo se basa en la utilización de ecuaciones exactas a partir del sistema de las ecuaciones de nodo de cada circuito. Ello permite, utilizando las herramientas simbólicas de MATLAB, seguir un procedimiento sistemático para la realización a través de la obtención de la función de red, el cálculo de las expresiones de los parámetros de esta en función de los componentes del circuito, y por último la confección de las ecuaciones de realización. Una vez obtenidas las expresiones de realización de los componentes del circuito, se procede al diseño utilizando los parámetros de la respuesta de frecuencias deseada por medio de un proceso de aproximación..
(36) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 2.1.1. 27. Aproximaciones. Aprovechando las propiedades de los amplificadores operacionales de tener baja impedancia de salida y muy alta impedancia de entrada, los filtros activos pueden realizarse de forma modular colocando en cascada secciones de segundo orden, y de ser necesaria, una sección de primer orden cuando el orden es impar. Es por ello que como materiales en este capítulo se diseñan solo secciones de segundo orden de redes de variable de estado. De esta forma, para filtros de orden superior se extiende el procedimiento de diseño a sus diversas secciones. Las redes de variable de estado tienen la particularidad de ser tipo MISO (Multiple-inputs Single-outputs) o de tipo SIMO (Single-input Multiple-outputs), por lo cual una misma red puede realizar varias respuestas de frecuencias. De esta forma, las respuestas de frecuencias obtenida de una misma red responden a los mismos parámetros que definen sus propiedades; esto es, el factor de calidad, Q, y frecuencia central del par de polos, fp, por lo que existe una interrelación entre ellas, siendo únicas para cada diseño. Esta particularidad comúnmente simplifica el proceso de aproximación, ya que, por ejemplo, si la red puede realizar simultáneamente respuestas de frecuencias pasobajo, pasobanda y pasoalto, solo es necesario hacer un proceso de aproximación para una de estas respuestas, quedando las demás dependientes de la calculada. A continuación se expone el procedimiento seguido para obtener las funciones de red que satisfacen las diversas especificaciones de diseño. Teniendo en cuenta la particularidad de que las redes con variable de estado pueden ser SIMO o MISO, para abarcar todas las posibilidades que estas ofrecen solo es necesario calcular las funciones de aproximación para las siguientes variantes: . Utilizando aproximantes de Butterworth, Chebyshev-I y Bessel de segundo orden, se calcularon sendas funciones con respuesta pasobajo. De esta forma, una red SIMO como la KHN que entrega también salidas pasoalto y pasobanda ofrecerá esas respuestas con las mismas propiedades de la función pasobajo calculada mediante cada método, sucediendo de forma semejante para una red SIMO de TT que en una de sus variantes entrega también una salida pasobajo inversora y pasobanda.. . Utilizando aproximantes de Butterworth, Chebyshev-I y Bessel de segundo orden, se calcularon sendas funciones con respuesta pasoalto. Estas encuentran utilidad en.
(37) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 28. redes SIMO como una de las variantes de la TT que entrega, además de la salida pasoalto también dos salidas pasobanda, una inversora y otra no inversora. . Utilizando aproximantes de Chebyshev-II y elíptica de segundo orden, se calcularon sendas funciones pasobajo. De esta forma, una red SIMO como la KHN puede realizar funciones pasobajo o pasoalto notch.. . Especificando la frecuencia central y el factor de calidad se construye directamente la función de red con respuesta de frecuencias pasobanda de segundo orden. Esta es necesaria cuando lo que se desee es obtener una respuesta de frecuencias pasobanda, independientemente de que el circuito entregue otros tipos de respuestas de frecuencias.. Para diseñar un filtro pasobajo de Butterworth se utilizó la función [b, a] = butter (n, p, 's'), donde n es el orden del mismo, p la frecuencia de corte y 's' indica que el diseño sea analógico. La función devuelve los vectores fila b y a que son los coeficientes de numerador y denominador respectivamente de la función de red H(s). Para una respuesta pasoalto solo se añade dentro del argumento el parámetro ftype que en este caso toma el valor 'high'. Para la realización, con redes de variable de estado, de filtros que respondan a una función aproximante de Butterworth de segundo orden y frecuencia de corte en 1 kHz se especifica: [b, a] = butter(2, 2*pi*1000, 's') Esta devuelve los coeficientes de la función de red pasobajo: b= 0. 0. 3.947841760435743e+007. a = 1.00000000e+000. 8.885765876316731e+003. 3.947841760435743e+007. lo que significa: 𝐻𝐿𝑃𝐵𝑢𝑡𝑡𝑒𝑟 (𝑠) =. 3.947841760435743 × 107 𝑠 2 + 8.885765876316731 × 103 s + 3.947841760435743 × 107. Si se necesita obtener una función de aproximación de un filtro de Bessel se procede de forma similar ya que a la función de MATLAB besself se le especifican los mismos parámetros que a la anterior butter aunque sin indicar el parámetro 's' pues esta función no soporta el diseño de filtros digitales..
(38) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 29. Cuando la función de aproximación responde a la aproximación de Chebychev-I se le agrega además el parámetro R que especifica la amplitud del rizo de la banda de paso en unidades de dB. La sintaxis en este caso es [b, a] = cheby1(n, R, p, 's'), donde p en este caso representa la frecuencia hasta donde la banda de paso mantiene el rizado R, lo que comúnmente se denomina frecuencia esquina de la banda de paso. Al igual que para la aproximante de Butterworth, cuando la respuesta de frecuencias es pasoalto se añade el parámetro ftype. En este trabajo se realizarán y verificarán redes de variable de estado con funciones de Chebyshev-I de segundo orden que tengan frecuencia esquina de la banda de paso en 1 kHz y amplitud del rizado en la banda de paso de 1 dB, por lo que las funciones de red tienen la siguiente expresión: 𝐻𝐿𝑃𝐶ℎ𝑒𝑏𝑦1 (𝑠) =. 3.879202073472595 × 107 𝑠 2 + 6.897268204419519 × 103 s + 4.352536314402692 × 107. Puede mostrarse, como ejemplo, la respuesta de la función aproximante pasobajo en la figura 2.1. Para el trazado de esta respuesta se utiliza la función freqs(b, a, ) que devuelve la respuesta de frecuencia compleja del filtro analógico especificado por los coeficientes b y a. Esta función evalúa la respuesta de frecuencia a lo largo del eje imaginario en el plano complejo a la frecuencia angular en radianes especificada en el vector real , donde es un vector conteniendo los valores de las frecuencias en que se evalúa la función, que en este caso se le asigna valores desde 100 hasta 105. Y luego se grafica con la función Figure que es muy común en el MATLAB..
(39) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 30. 𝐑 = 𝟏𝐝𝐁. Figura 2.1. Respuesta magnitud-frecuencia pasobajo Chebychev- I. Las dos funciones pasobajo notch se hicieron, uno con la función cheby2 que tiene las mismas especificaciones que cheby1 pero el parámetro R es la amplitud del rizo en la banda de rechazo en unidades de dB, por lo que p en este caso es la frecuencia de la banda derechazo a partir de la cual el rizado se mantiene por debajo de R. A diferencia de las funciones con respuestas pasobajo, las pasobajo notch posee un tercer parámetro que caracteriza su respuesta de frecuencias, la frecuencia del cero de transmisión, z. La otra función pasobajo notch se obtuvo con la función ellip(n, Rp, Rs, p, 's') donde Rp es la amplitud en dB del rizado en la banda de paso, Rs en la banda de rechazo, mientras que p es la frecuencia hasta donde se extiende el rizado en la banda de paso. 2.1.2. Escoger una configuracion circuital. Para diseñar los diferentes filtros basados en variable de estado se utiliza el toolbox simbólico de MATLAB dado que permite, partiendo de un sistema de ecuaciones algebraicas, obtener expresiones literales para los parámetros del circuito sin que medien valores numéricos para las variables..
(40) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 31. Los circuitos que se analizarán son las configuraciones Kerwin-Huelsman-Newcomb (KHN) y Tow-Thomas (TT) que son las escogidas en este trabajo de diploma. A cada circuito se le determina su función de red, la cual que depende de sus componentes y topología. Teniendo la función de red se obtienen las fórmulas para realizar sus componentes, las cuales dependen de los parámetros de la función de red que se desea realizar, y que se obtuvo siguiendo el proceso de aproximación que se explicó en el epígrafe anterior. Para una red de KHN el anexo 1 explica cómo se procede para realizar sus componentes. De esta forma, para la función aproximante de Butterworth obtenida en el epígrafe anterior se llegó al circuito que se muestra en la figura 2.2. Entonces cómo saber si los circuitos diseñados tienen las mismas características que las respuestas de frecuencia a partir de las que fueron realizados, para esto se usa el software TINA TI o Multisim, con los cuales se prueban el circuito real con valores de los componentes pasivos exactos y utilizando un modelo del AOP 4353. Estos softwares de simulación trazan la gráfica de respuesta de magnitud-frecuencia, por lo que un análisis de la misma permite verificar que se satisfacen las especificaciones de la respuesta deseada. Su uso es sencillo, luego de tener todos los valores de los componentes del circuito, solamente se dibuja en su plataforma de edición esquemática (figura 2.2): Kerwin-Huelsman-Newcomb (KHN) 2do Orden Pasobajo con entrada inversora R4 1,7k R5 1,7k. R5 = 1.669e3 Ω. V-. R3 1,7k. -. C2 47n. R7 3,4k. -. +. -. R6 = 3.388e3 Ω. C1 47n. R6 3,4k. V-. R3 = 1.669e3 Ω. V-. R1 = 5.006e3 Ω. VF1 VG1. C1 = 47e-9 F R1 5k. +. +. V+ C3 10n. C2 = 47e-9 F. +. +. U1 OPA4353. U2 OPA4353 V+ C4 10n. +. +. U3 OPA4353 V+ C5 10n. R2 5,6k. R2= 5.6079e3 Ω V-. R4= 1.669e3 Ω R7= 3.3846e3 Ω. fo = 1 kHz Q = 0.707.. V+. V3 5 V2 5. Figura 2.2. Red KHN de segundo orden hecho con los valores de los componentes a la izquierda, mediante el software TINA.
(41) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 32. Para verificar la respuesta de magnitud-frecuencias se le realiza un análisis de corriente alterna, donde se especifican características como la frecuencia de inicio y final del barrido, barrido tipo logarítmico y magnitud en dB. Este análisis arroja una gráfica que permite comprobar cuan correcto está el presente diseño, análisis que se realizará en el tercer capítulo. 2.2. Diseño del experimento. Con este trabajo se pretende llevar a cabo un análisis detallado sobre el nivel de variación de la respuesta de magnitud-frecuencia de un circuito ante las variaciones de sus diversos componentes y por tanto de la sensibilidad del mismo, para filtros de segundo orden basados en variable de estado con topologías Kerwin-Huelsman-Newcomb y Tow-Thomas, que son circuitos que utilizan tres amplificadores operacionales. Donde se utiliza como red nominal la que emplea valores exactos de componentes obtenidos a partir de los métodos de aproximación, se determinará la sensibilidad de estas redes donde se fija una tolerancia para los componentes del 10%. Como se explicó en el primer capítulo, el objetivo es facilitar que se adquieran los componentes del circuito que menos distorsionen las respuesta de magnitudfrecuencia de los filtros con una mayor tolerancia lo que equivale a un menor precio, lo que es el objetivo principal de todo ingeniero, realizar más con menos. Para llevar a cabo este análisis se comparan los resultados de aplicar el método de peor caso (Worst case) como indicadores de la sensibilidad de los parámetros de la función de red del circuito (p, Q, z y G) ante las variaciones de sus componentes. Como primer paso se utiliza el Symbolic Math Toolbox de MATLAB para determinar la sensibilidad teórica de un circuito a una frecuencia determinada con respecto a un componente, dándole una tolerancia común para ese componente, ya sea resistor o capacitor, esto se hace partiendo de la propiedad 𝑠𝑋𝑐𝑌 = 𝑠𝑋𝑌 y que la constante c = 1/2, entonces: 𝑆𝑋𝑌 =. 𝜕𝑌⁄𝑌 𝜕𝑋⁄𝑋. =. 𝜕(ln 𝑌) 𝜕(ln 𝑋). ,. (2.1). siendo X el componente en función e Y el parámetro a analizar, que como se explicó anteriormente puede ser p, Q, z y G. Este procedimiento se realizó a través de MATLAB, lo que resulta más práctico, ya que se toma ventaja de la función Y=diff (X) que calcula la diferencia entre los elementos adyacentes de X.(MathWorks, 2002).
(42) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 33. El resultado teórico de la sensibilidad se contrasta con el obtenido experimentalmente por medio del análisis de peor caso. Para ello se calcula gráficamente la variación que sufre el parámetro que se analiza, Y, con respecto al componente que varía, X, donde se utiliza igualmente la expresión 29. Dado que, 𝑆𝑋𝑌𝑖 expresa el % de cambio que sufre el parámetro Y de la función de red ante un % de cambio del componente Xi del circuito, si por ejemplo, en una configuración de circuito para un filtro activo de 2do orden la sensibilidad de su p con 𝜔. respecto al resistor R2 es -0.5, lo cual se denota mediante 𝑆𝑅2𝑝 = -0.5, ello significa que si R2 se incrementa o disminuye en un 1%, entonces debido al signo negativo el valor de p disminuye o incrementa un 0.5%, o lo que es lo mismo, en un factor -0.005. El análisis del peor caso (Worts Case) permite determinar los peores efectos posibles que tiene sobre un parámetro la variación de un componente, lo cual es consecuencia de la sensibilidad del parámetro para cada circuito. De las herramientas computacionales disponibles, la que ofrece esta posibilidad es Multisim. Cuando se utiliza tolerancia de 10 % se obtendrán las respuestas de frecuencia extremas alrededor de la nominal, lo cual permitirá realizar un análisis comparativo, además de verificar experimentalmente el procedimiento teórico utilizado para determinar la sensibilidad por medio de métodos simbólicos. El análisis del peor caso puede realizarse con cada uno de los componentes que conforman al circuito. Resulta oportuno recalcar que el análisis de la sensibilidad se realiza basado en el análisis de la tolerancia de los componentes del circuito. Dado que todos los componentes pueden variar alrededor de su valor nominal y dentro de su margen de tolerancia, el análisis de la tolerancia que puede admitirse para cada componente es la base para el análisis de la sensibilidad con el propósito de encontrar el rango de variación de los parámetros de interés de las respuestas del filtro. Esto es, el problema del análisis de la tolerancia durante el diseño de un filtro consiste en encontrar el posible margen de variación de cada componente que garantice que las variaciones de los parámetros de las respuestas del circuito (p, Q, z y G) tengan una distribución aceptable para que no comprometan su desempeño. Para determinar la mencionada distribución de la variación de cada uno de los parámetros de la función de red del filtro se han desarrollado varias técnicas, pero las que se reconocen como de mayor potencialidad y eficacia se han basado hasta ahora en el análisis de Monte.
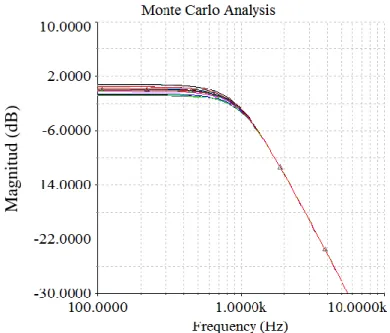
(43) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 34. Carlo. Ello permite, ante todo, determinar el tipo de distribución estadística que tienen las variaciones del parámetro. El análisis de Monte Carlo será realizado mediante el software Multisim el que posee un ambiente de trabajo parecido al Tina, por lo que las simulaciones se harán sobre circuitos que utilizan para los componentes modelos que simulan la realidad. Este análisis permite determinar las variaciones que sufre la respuesta de frecuencia nominal analizada anteriormente con Tina o Multisim ya que arroja una serie de curvas de respuesta de magnitud-frecuencia, pasobajo, pasoalto, pasabanda o notch que donde se analiza no solo el peor y mejor caso para una tolerancia determinada, sino que se toman un número determinado de casos, pero todos aleatorios, por lo que puede o no estar recogido el peor y mejor caso. Las herramientas utilizadas para la ayuda en el análisis permiten especificar la tolerancia que tendrá el componente a realizarle el análisis, también la frecuencia de inicio y final de la corrida, así como el número de corridas, la variable de salida, el tipo de análisis, el tipo de barrido y la cantidad de puntos de análisis como se muestra en la figura 2.3 donde se realizan. Magnitud (dB). quince corridas entre 10 Hz y 10 kHz.. Figura 2.3. Análisis de Monte Carlo con 15 corridas en Multisim.. Para la realización del análisis de Monte Carlo se utilizarán variaciones de cada componente de forma aleatoria con media igual a su valor nominal y distribución de densidad probabilística uniforme dentro del intervalo del T % (tolerancia) de su valor nominal..
(44) CAPÍTULO 2. PROCEDIMIENTO PARA EL DISEÑO DE REDES BASADAS EN VARIABLES DE ESTADO. 2.3. 35. Especificaciones. Para la realización de este trabajo de diploma se usó una computadora core i3 con 2 GB de RAM y el procesador con una frecuencia de 2.2GHz, con Windows 7 como sistema operativo y los softwares Tina TI, Multisim, MATLAB y Filter Wiz Lite. Cada corrida se realizó en muy breve tiempo, invirtiéndose aproximadamente menos de dos minutos para un análisis de Monte Carlo de 15 corridas y menos de 5 minutos para cada análisis de peor caso. La inversión en tiempo de ejecución está influenciada por la magnitud del intervalo de frecuencias que se especifique y la cantidad de puntos a evaluar en ese intervalo. Las herramientas de ayuda al análisis que se utilizaron fueron: Tina. Requiere un procesador Intel Pentium o superior, al menos 256 MB de memoria RAM, 200 MB de espacio disponible en el disco duro, así como sistema operativo Microsoft Windows 9x / ME / NT / 2000/ XP / Vista / Windows 7. Multisim. Require un procesador Intel Pentium 4 o superior, 512 MB de memoria RAM, 1.5 GB de espacio libre en el disco duro, sistema operativo Windows 2000 Service Pack 3 o superior y se recomienda una tarjeta gráfica 3D Open GL® MATLAB. Requiere procesador Intel Pentium 4 o superior, al menos 1GB de memoria RAM, 1.8 GB de espacio libre en el disco duro y sistema operativo Windows XP/Vista/7 y 8. Conclusiones del capítulo Como conclusión de este capítulo se destaca que para el diseño de filtros activos basados en variable de estado es necesario hacer énfasis en la importancia de los métodos simbólicos de MATLAB, ya que facilitan la solución de sistemas de ecuaciones para determinar la función de red del circuito, obtener las expresiones de diseño, así como las de la sensibilidad sin necesidad de evaluar los componentes del circuito. También podemos concluir que las herramientas computacionales son vitales para hallar y analizar las respuestas de magnitudfrecuencia de las configuraciones de los circuitos KHN y TT, ya que permiten comprobar los valores de sensibilidad de los circuitos a través de los análisis del peor caso y Monte Carlo, lo cual es posible a través de Multisim..
Figure


+7





Documento similar