Análisis cinemático inverso y directo del robot paralelo
131
0
0
Texto completo
(2) i. DECLARACIÓN. Nosotras, Lorena Alejandra Fernández Yánez y Luisa Fernanda Sotomayor Reinoso, declaramos que el trabajo aquí descrito es de nuestra autoría; que no ha sido previamente presentado para ningún grado o calificación profesional; y, que hemos consultado las referencias bibliográficas que se incluyen en este documento.. La Escuela Politécnica Nacional, puede hacer uso de los derechos correspondientes a este trabajo, según lo establecido por la Ley de Propiedad Intelectual, por su Reglamento y por la normatividad institucional vigente.. ALEJANDRA FERNÁNDEZ. LUISA SOTOMAYOR.
(3) ii. CERTIFICACIÓN. Certifico que el presente trabajo fue desarrollado por Lorena Alejandra Fernández Yánez y Luisa Fernanda Sotomayor Reinoso bajo mi supervisión.. ING. IVÁN ZAMBRANO M.Sc DIRECTOR DE PROYECTO.
(4) iii. DEDICATORIA. A mis padres que cada día me motivan a ser una mejor persona. Alejandra. A mis hijos Nelson Fernando y Antonella de Carmen que son mi fortaleza y la fuente de inspiración para superarme cada día, a mis padres y hermanas por sus consejos y apoyo que me permitieron ser que soy hoy. A mis compañeros y amigos que se han convertido en parte de mi familia. En memoria de mi hermano Luis compañero de juegos estás en los recuerdos y mi corazón sé que desde el cielo me cuidas y proteges. Luisa.
(5) iv. AGRADECIMIENTO. A ti Señor por hacer este sueño una realidad por todo el amor que nos rodeas y en tus manos está nuestra vida. A nuestro director de proyecto Ingeniero Iván Zambrano M.Sc por su constante aporte académico, su paciencia, guía y amistad. A los doctores Vicente Mata, Antonio Sánchez, Ángel Varela y Álvaro Page por la ayuda que nos otorgaron y el tiempo de asesorías brindado para que este trabajo pudiera culminar. A la Universidad Politécnica Salesiana por su estímulo y colaboración. A nuestros grandes amigos Johanna, Hamilton y Junior por brindarnos su amistad y por todo el apoyo durante esta época de peripecias, sufrimientos pero también de muchas glorias. A todas aquellas personas, familiares y amigos, que de un modo u otro nos han apoyado en forma incondicional para la realización de este trabajo.. Alejandra y Luisa.
(6) v. ÍNDICE DE CONTENIDO. DECLARACIÓN ....................................................................................................................... i CERTIFICACIÓN ................................................................................................................... ii DEDICATORIA ......................................................................................................................iii AGRADECIMIENTO ............................................................................................................. iv ÍNDICE DE CONTENIDO ..................................................................................................... v ÍNDICE DE FIGURAS .........................................................................................................viii ÍNDICE DE TABLAS ............................................................................................................. xi RESUMEN .............................................................................................................................. xii PRESENTACIÓN .................................................................................................................xiii. CAPÍTULO 1. FUNDAMENTACIÓN TEÓRICA ........................................................... 1 1.1. Introducción ............................................................................................................. 1. 1.2. Estructura del Robot ................................................................................................. 2. 1.3. Robots Seriales ......................................................................................................... 4. 1.4. Robots Paralelos ....................................................................................................... 5. 1.4.1. Clasificación de los Robots Paralelos ............................................................... 7. 1.5. Aplicaciones de los Robots ...................................................................................... 8. 1.6. Modelado Cinemático del Robot Paralelo ............................................................. 10. 1.6.1. Cinemática Inversa del Robot Paralelo ........................................................... 11. 1.6.2. Cinemática Directa del Robot Paralelo ........................................................... 11. 1.6.3. Espacio De Trabajo del Robot Paralelo .......................................................... 12. 1.7. Método de Denavit-Hartenberg (D-H) ................................................................... 12. 1.8. Localización Espacial del Robot ............................................................................ 15. 1.8.1 1.9. Ángulos R-P-Y ............................................................................................... 16. Anatomía de la Extremidad Inferior....................................................................... 17. 1.9.1. Cadera ............................................................................................................. 18. 1.9.2. Pierna .............................................................................................................. 18.
(7) vi. 1.9.3 1.10. Pie ................................................................................................................... 19 Movimientos de la Extremidad Inferior ............................................................. 20. 1.10.1. Articulación de la Cadera ............................................................................ 20. 1.10.2. Articulación de la Rodilla ........................................................................... 23. 1.10.3. Articulación del Tobillo .............................................................................. 24. CAPÍTULO 2. DISEÑO CINEMÁTICO DEL ROBOT PARALELO ......................... 26 2.1. Introducción ........................................................................................................... 26. 2.2. Movimientos del Robot Paralelo ............................................................................ 27. 2.3. Topología del Robot Paralelo ................................................................................. 28. 2.4. Algoritmo de Denavit – Hartenberg (D-H) aplicado al Robot Paralelo ................. 29. 2.4.1. Análisis de Cadena UPE ................................................................................. 31. 2.4.2. Análisis de Cadena RPU ................................................................................. 36. 2.5. Cinemática Inversa del Robot ................................................................................ 41. 2.5.1. Posición ........................................................................................................... 41. 2.5.1.1. Ecuaciones de Restricción ........................................................................ 42. 2.5.2. Velocidad ........................................................................................................ 50. 2.5.3. Aceleración ..................................................................................................... 54. 2.6. Cinemática Directa del Robot ................................................................................ 55. 2.6.1. Posición ........................................................................................................... 55. 2.6.1.1. Ecuaciones de Restricción ........................................................................ 56. 2.6.2. Velocidad ........................................................................................................ 59. 2.6.3. Aceleración ..................................................................................................... 62. 2.7. Características del Espacio de Trabajo................................................................... 66.
(8) vii. CAPÍTULO 3. VALIDACIÓN DEL ROBOT PARALELO .......................................... 68 3.1. Determinación de los Parámetros Físicos del Robot.............................................. 68. 3.2. Simulación del Robot Paralelo ............................................................................... 73. 3.2.1. Descripción de la Aplicación .......................................................................... 74. 3.2.1.1. Modelado 3D en VRBUILD2 ................................................................... 74. 3.2.1.2. Interfaz en GUIDE .................................................................................... 76. 3.2.2. Algoritmo de la Cinemática Inversa del Robot Paralelo ................................ 81. 3.2.3. Algoritmo de la Cinemática Directa del Robot Paralelo ................................ 82. 3.2.4. Ejemplos. de Simulación de la Cinemática Directa e Inversa del. Robot Paralelo ............................................................................................................. 84. 3.3. 3.2.4.1. Ejemplo 1 .................................................................................................. 84. 3.2.4.2. Ejemplo 2 .................................................................................................. 86. 3.2.4.3. Ejemplo 3 .................................................................................................. 87. 3.2.4.4. Ejemplo 4 .................................................................................................. 88. Análisis De Resultados........................................................................................... 89. CONCLUSIONES Y RECOMENDACIONES ....................................................................... 91 BIBLIOGRAFÍA ...................................................................................................................... 92 ANEXOS .................................................................................................................................. 96.
(9) viii. ÍNDICE DE FIGURAS Figura 1.1 Articulaciones según sus grados de libertad. ........................................................... 3 Figura 1.2 Clasificación de los eslabones según el número de nodos ....................................... 3 Figura 1.3 Cadenas cinemáticas ................................................................................................ 4 Figura 1.4 (a) robot serie y (b) robot paralelo ........................................................................... 6 Figura 1.5 Robots paralelos usados en la industria ................................................................... 7 Figura 1.6 Aplicaciones de los robots ....................................................................................... 8 Figura 1.7 Aplicaciones de los robots en la medicina ............................................................... 9 Figura 1.8 Metodología de la cinemática ................................................................................ 11 Figura 1.9 (a) cartesiano, (b) cilíndrico y (c) esférico ............................................................. 15 Figura 1.10 Ángulos R-P-Y..................................................................................................... 16 Figura 1.11 Estructura ósea y muscular de la pierna humana ................................................. 17 Figura 1.12 Huesos de la cadera masculina y femenina .......................................................... 18 Figura 1.13 Vista de la articulación de rodilla ........................................................................ 19 Figura 1.14 Vista anterior y lateral de un pie humano ............................................................ 20 Figura 1.15 Movimiento de flexión de la cadera ..................................................................... 21 Figura 1.16 Movimiento de extensión de la cadera ................................................................. 21 Figura 1.17 Movimiento de abducción de la cadera................................................................ 22 Figura 1.18 Movimiento de rotación externa de la cadera ...................................................... 22 Figura 1.19 Articulación de la rodilla en su posición de referencia ........................................ 23 Figura 1.20 Flexión de la rodilla ............................................................................................. 24 Figura 1.21 Movimiento de flexión y extensión del tobillo .................................................... 24 Figura 1.22 Movimientos de eversión e inversión del pie....................................................... 25 Figura 1.23 Movimiento del pie abducción y aducción .......................................................... 25 Figura 2.1 Robot Delta ............................................................................................................ 27 Figura 2.2 Topología del robot 3UPE – RPU ......................................................................... 28 Figura 2.3 Ejes del robot ......................................................................................................... 30 Figura 2.4 Enumeración de eslabones y articulaciones ........................................................... 30 Figura 2.5 Ejes Z en dirección del movimiento de la cadena UPE ......................................... 31 Figura 2.6 Definición del origen y del eje X en la cadena UPE .............................................. 32 Figura 2.7 Ley de la mano derecha para establecer el eje Y en la cadena UPE ...................... 32 Figura 2.8 Ejes rotacionales y traslacionales de la cadena UPE ............................................. 33.
(10) ix. Figura 2.9 Parámetros D-H del grado q1 del brazo UPE ......................................................... 34 Figura 2.10 Parámetros D-H del grado q2 del brazo UPE ....................................................... 34 Figura 2.11 Parámetros D-H del grado q3 del brazo UPE ....................................................... 35 Figura 2.12 Parámetros D-H del grado q4 del brazo UPE ....................................................... 35 Figura 2.13 Parámetros D-H del grado q5 del brazo UPE ....................................................... 35 Figura 2.14 Parámetros D-H del grado q6 del brazo UPE ....................................................... 36 Figura 2.15 Ubicación de los ejes Z en la cadena RPU .......................................................... 37 Figura 2.16 Definición del origen de coordenadas para la cadena RPU ................................. 38 Figura 2.17 Definición del eje X en la cadena RPU................................................................ 38 Figura 2.18 Ley de la mano derecha para establecer el eje Y en la cadena RPU.................... 39 Figura 2.19 ejes rotacionales y traslacionales de la cadena RPU ............................................ 39 Figura 2.20 Parámetros D-H del grado q1 del brazo RPU....................................................... 40 Figura 2.21 Parámetros D-H del grado q2 del brazo RPU....................................................... 40 Figura 2.22 Parámetros D-H del grado q3 del brazo RPU....................................................... 40 Figura 2.23 Parámetros D-H del grado q4 del brazo RPU....................................................... 41 Figura 2.24 Determinación de los puntos de análisis del mecanismo del robot ..................... 42 Figura 2.25 Distancias R y Rm ............................................................................................... 43 Figura 2.26 Trayectorias para definir la posición del punto A ................................................ 44 Figura 2.27 Referencia del sistema móvil y cadenas para la cinemática directa. ................... 56 Figura 3.1 Dimensiones mínimas de la plataforma móvil ....................................................... 69 Figura 3.2 Distribución del pie en la base ............................................................................... 70 Figura 3.3 Dimensiones del triángulo equilátero de la plataforma móvil ............................... 71 Figura 3.4 Base fija y plataforma móvil del robot.................................................................. 71 Figura 3.5 Dimensiones de las plataformas con radio R= 613.33 mm ................................... 72 Figura 3.6 Brazo UPE con sus articulaciones ......................................................................... 75 Figura 3.7 Modelado en 3D del robot paralelo ....................................................................... 76 Figura 3.8 Pantalla principal de la simulación en GUIDE ...................................................... 76 Figura 3.9 Ejercicio para comprobar el funcionamiento de robot_paralelo.m ....................... 77 Figura 3.10 Gráficas de la posición de cada una de las articulaciones de las cadenas cinemáticas ....................................................................................................................... 78 Figura 3.11 Tabla de datos de los movimientos de las articulaciones..................................... 78 Figura 3.12 Simulación del modelado con cinemática inversa ............................................... 79 Figura 3.13 Gráfica de resultados cinemática directa ............................................................. 80.
(11) x. Figura 3.14 Tabla de resultados de la cinemática directa ........................................................ 80 Figura 3.15 Diagrama de flujo del programa para la cinemática inversa ................................ 81 Figura 3.16 Diagrama de flujo del programa para la cinemática directa ................................ 83 Figura 3.17 Resultados del ejemplo 1 ..................................................................................... 84 Figura 3.18 Movimiento de las articulaciones de la cinemática inversa – posición ............... 85 Figura 3.19 Movimiento de las articulaciones de la cinemática directa – posición ................ 86 Figura 3.20 Resultados del ejemplo 2 .................................................................................... 87 Figura 3.21 Resultados del ejemplo 3 ..................................................................................... 88 Figura 3.22 Resultados del ejemplo 4 ..................................................................................... 89.
(12) xi. ÍNDICE DE TABLAS Tabla 1.1 Ventajas y desventajas de los robots paralelos vs. serie ............................................ 6 Tabla 1.2 Aplicaciones de los robots paralelos ......................................................................... 9 Tabla 2.1 Movimientos de la pierna ........................................................................................ 27 Tabla 2.2 Parámetros D-H del primer par ............................................................................... 33 Tabla 2.3 Resumen de los parámetros D-H de las cadenas UPE............................................. 36 Tabla 2.4 Resumen de los parámetros D-H de la cadena RPU .............................................. 41 Tabla 2.5 Rango de las variables de la plataforma móvil del robot paralelo .......................... 67 Tabla 3.1 Tabla de las correspondencias entre talla y medida del pie ..................................... 68 Tabla 3.2 Equivalencia de grados de libertad con variables de Matlab................................... 82 Tabla 3.3 Equivalencia entre variables de cinemática directa y Matlab.................................. 83 Tabla 3.4 Errores en porcentaje del ejemplo 1 ........................................................................ 85 Tabla 3.5 Errores en porcentaje del ejemplo 2 ........................................................................ 87.
(13) xii. RESUMEN El presente trabajo es parte de un proyecto de investigación multidisciplinario de la Escuela Politécnica Nacional PIMI 15-04 "Control adaptativo basado en inteligencia artificial aplicado a un sistema mecatrónico fundado en un robot paralelo para la diagnosis y rehabilitación". El objetivo del trabajo es analizar la cinemática de un robot paralelo con 4GDL, constituido por una plataforma fija y una móvil, unidas por cadenas cinemáticas de tipo 3UPE (Universal, Prismática, Esférica) – RPU (Rotacional, Prismática, Universal), para aplicarlo en actividades de rehabilitación de rodilla. En atención a las funciones que debe desempeñar el robot, se establece una configuración geométrica inicial, la que posteriormente se verifica a través de un proceso de simulación. Se determinan los parámetros de Denavit – Hartenberg (D-H) para definir las matrices de transformación que permiten establecer las ecuaciones de restricción. Se aplican los principios de la cinemática inversa y directa para encontrar las coordenadas generalizadas y velocidades de las articulaciones. Con las posiciones límites del miembro inferior, se establece el espacio de trabajo del robot. Se desarrollan subrutinas de programación en Matlab que permiten ingresar los giros y traslaciones de la plataforma móvil como parámetros de la cinemática inversa; las posiciones obtenidas se utilizan como entradas de la cinemática directa y se determina el error generado. A fin de poder apreciar de mejor manera el movimiento del robot se desarrolla el modelo geométrico en el módulo VRBUILD en Matlab y se observa los resultados con la interfaz en GUIDE. Este trabajo es la primera fase del proyecto de investigación mencionado, que continúa con el estudio dinámico y el desarrollo del sistema de control..
(14) xiii. PRESENTACIÓN En la actualidad, por el estilo de vida, gran porcentaje de la población realiza deportes de alto impacto lo que ha aumentado la cantidad de lesiones en los miembros inferiores, muchos de los cuales requieren rehabilitaciones largas, costosas y dolorosas.. Los centros y clínicas de rehabilitación presentan algunos problemas en sus servicios, como poco espacio para la cantidad de pacientes, cantidad insuficiente de médicos especialistas y fisioterapeutas, demora en la agenda de citas, tratamientos con movimientos bruscos o inadecuados a la dolencia. Además hay que considerar que el traslado de los pacientes a los centros de rehabilitación puede suponer no solo una molestia para el paciente sino un coste importante para el paciente.. Con el fin de garantizar una asistencia de calidad a una mayor cantidad de pacientes, se. han realizado diversos intentos para automatizar el proceso de rehabilitación,. pero los sistemas robotizados empleados, basados fundamentalmente en mecanismos de lazo abierto, son muy costosos y difíciles de operar. Por ello, se considera que un robot paralelo con un limitado número de grados de libertad puede constituir una base mecánica robusta y de bajo coste para la rehabilitación robotizada.. En este trabajo se aborda el diseño y modelado mediante la metodología de Denavit-Hartenberg y resolución del problema cinemático inverso y directo de un robot paralelo para aplicaciones biomecánicas, específicamente rehabilitación de lesiones de rodilla.. El presente trabajo forma parte de un proyecto multidisciplinario de investigación "Control adaptativo basado en inteligencia artificial aplicado a un sistema mecatrónico fundado en un robot paralelo para la diagnosis y rehabilitación" que busca desarrollar un laboratorio de bioingeniería que aporte conocimientos sobre el diseño, construcción y control de robots paralelos orientados a la biomedicina..
(15) xiv. OBJETIVOS El presente proyecte tiene los siguientes objetivos.. GENERAL. Analizar el problema cinemático inverso y directo de un robot paralelo para aplicaciones de rehabilitación de lesiones de rodilla.. ESPECÍFICOS -. Definir los movimientos que requiere el robot paralelo para la diagnosis y rehabilitación de lesiones de rodilla.. -. Identificar la topología del robot paralelo que reproduzca los movimientos para la diagnosis y rehabilitación de lesiones de rodilla con un mínimo de grados de libertad.. -. Modelar la cinemática inversa y directa del robot paralelo mediante la convención de Denavit – Hartenberg.. -. Validar el modelo mediante simulación.. Los beneficiarios de esta tesis son los investigadores del proyecto final para seguir con el estudio, construcción y control del robot paralelo. Al final del proyecto de investigación son potenciales usuarios, pacientes que necesiten de ejercicios de rehabilitación de rodilla con la supervisión de profesionales especializados como fisioterapeutas, fisiatras, traumatólogos, rehabilitadores, además de instituciones públicas y privadas que brinden servicios de rehabilitación.
(16) 1. 1 CAPÍTULO 1 FUNDAMENTACIÓN TEÓRICA 1.1 INTRODUCCIÓN En la historia de la humanidad, las personas han sentido atracción por las máquinas primero con accionamientos mecánicos, pasando por los eléctricos hasta llegar a controles electrónicos, iniciándose en la década de los 40 la robótica.. Los primeros dispositivos fueron manipuladores teleoperados, que se construyeron con el objetivo de manejar elementos radioactivos que repliquen fielmente los movimientos del operador, sin embargo la transmisión mecánica se sustituyó con la electrónica con el transcurso del tiempo y los avances tecnológicos. (Barrientos, Peñin, Blaguer, & Aracil, 2007).. La palabra robot viene de 'robotnik' o 'robota', que se podría traducir como 'trabajo tedioso' en checo. Lo empleó por vez primera, en 1917, el dramaturgo checoslovaco Karel Capek en su obra Rossum's Universal Robot (R.U.R.) La trama era sencilla: el hombre fabrica un robot, luego el robot mata al hombre. Pero fue el escritor Isaac Asimov quien popularizó el concepto con sus muchos relatos de ciencia ficción, dotándolo de un componente romántico del que en realidad carecen estos artefactos. (Saha, 2010).. Un robot se describe con varias definiciones, por ejemplo la del Robot Institute of América (RIA) de 1980 que dice: “Un robot manipulador multifuncional reprogramable diseñado para mover materiales, partes, herramientas o dispositivos especializados a través de movimientos programados para la ejecución de una gran variedad de tareas.” (Reyes, 2011, pág. 3). Una definición más actual de Reyes Cortés, dice: “La robótica es una disciplina científica que aborda la investigación y desarrollo de una clase particular de sistemas mecánicos, denominados robots manipuladores, diseñados para realizar.
(17) 2. una amplia variedad de aplicaciones industriales, científicas, domésticas y comerciales”. (pág. 4). La noción de robótica implica una cierta idea preconcebida de una estructura mecánica y eléctrica capaz de adaptarse a diversas acciones; las principales características de un robot son: movilidad, gobernabilidad, programación, autonomía, repetivilidad y multifuncionalidad.. En la actualidad el campo de trabajo de la robótica es muy amplio, se han implementado nuevas tecnologías para varias áreas de trabajo como la cinemática y la dinámica en mecánica, la planificación de sistemas, el control, sensores, lenguajes de programación e inteligencia artificial en electrónica y sistemas. Existe una gran variedad de robots, con características físicas y funcionales asociados a su estructura mecánica, a sus características operativas y al campo de aplicación para el cual han sido diseñados. Lo que hace difícil concretar elementos comunes a todos, pero en la mayoría disponen de un esqueleto o chasis, que puede ser interno o externo, motores, piezas que permiten su movilidad, sistemas de agarre y manipulación y una fuente de alimentación, normalmente eléctrica.. (López. Apostolovich, 2009). 1.2 ESTRUCTURA DEL ROBOT. La cadena cinemática llamada brazo se compone de uno o varios eslabones unidos por articulaciones, los movimientos en las articulaciones son de desplazamiento, giro o una combinación de ambos, en la Figura 1.1 se observa las articulaciones más usadas clasificadas según los grados de libertad que pueden desarrollar..
(18) 3. Figura 1.1 Articulaciones según sus grados de libertad. Fuente (Barrientos, Peñin, Blaguer, & Aracil, 2007). El eslabón es el cuerpo rígido constituido al menos por dos nodos, en donde se unen con las articulaciones y formas las cadenas cinemáticas, en la Figura 1.2 se puede observar la clasificación de los eslabones según el número de nodos que posee.. Figura 1.2 Clasificación de los eslabones según el número de nodos Elaborado por las autoras, 2016. La cadena cinemática es la unión de varios eslabones y articulaciones. Si cada eslabón se encuentra conectado a otro por al menos dos caminos se denomina cadena cinemática cerrada y, si en la cadena cinemática cada eslabón se conecta.
(19) 4. exclusivamente al anterior y al siguiente, se denomina cadena cinemática abierta, se observa en la Figura 1.3 estos tipos de cadenas cinemáticas.. Figura 1.3 Cadenas cinemáticas Elaborado por las autoras, 2016. En cada cadena cinemática abierta todas las articulaciones son activas, de las cadenas cerradas solo algunas son activas y otras pasivas. Existen mecanismos formados por cadenas cinemáticas cerradas y abiertas denominadas hibridas. (Cisneros León, 2006). 1.3 ROBOTS SERIALES En términos generales, un robot serie llamado también robot de cadena abierta es un conjunto de cuerpos (llamados enlaces) conectados en serie a través de juntas de accionamiento, que son típicamente de revolución (rotación) o prismático (traslación). Una extremidad de esta cadena en serie de enlaces se llama la base y el otro el efector final. Un gran pocentaje de los robots industriales es de tipo serie. Estos robots consisten en varios subsistemas: de movimiento, de reconocimiento y de control..
(20) 5. El subsistema de movimiento es la estructura del robot que realiza movimientos similares a los brazos humanos, consta de manipuladores, efector final, actuador y transmisión. El subsistema de reconocimiento utiliza diferentes sensores que identifican la posición del objeto a manipular y el ambiente de trabajo, consta de sensores y convertidores. El subsistema de control regula el movimiento del robot para que efectué una tarea utilizando las señales del subsistema de reconocimiento y consta de un controlador digital y un conversor digital análogo. (Saha, 2010). 1.4 ROBOTS PARALELOS El robot paralelo llamado también robot de cadena cerrada, se compone básicamente una plataforma móvil o efector final unido a una base fija a través de varias cadenas cinemáticas independientes de eslabones interconectados. En otras palabras, un robot paralelo tiene por lo menos dos "brazos". Los grados de libertad (GDL) son desplazamientos longitudinales o rotacionales independientes que puede tener un mecanismo. Algunas articulaciones pueden tener más de un GDL.. Los movimientos que pueden realizar los robots están asociados a los grados de libertad y del número de cadenas cinemáticas que posean. La cantidad de grados de libertad y por ende, de la complejidad del robot, dependen de la acción a realizar.. Típicamente cada brazo está controlado por un actuador, para reducir la complejidad. y. regular. la. energía. de. los. actuadores y así mejorar. las. características de velocidad y capacidad de carga del robot. Los robots paralelos consiguen manipular cargas mayores que los seriales, ya que en sus brazos se distribuye la carga. Un ejemplo de estos robots se lo observa en la Figura 1.4..
(21) 6. Figura 1.4 (a) robot serie y (b) robot paralelo Fuente (adept, 2016). Al comparar los dos tipos de robots se obtienen varias ventajas y desventajas que se aprecian en la ¡Error! No se encuentra el origen de la referencia... Tabla 1.1 Ventajas y desventajas de los robots paralelos vs. serie. Elaborado por las autoras, 2016.
(22) 7. 1.4.1 CLASIFICACIÓN DE LOS ROBOTS PARALELOS. Es muy difícil clasificar a los manipuladores paralelos dado el gran número de parámetros que intervienen, pero según las características del movimiento se pueden clasificar en planares y espaciales, dependiendo de si actúan sobre un plano de dos o tres dimensiones, además de los robots especiales como el Delta, Orthoglide, el Adept Quattro y el robot de 6GDL, ejemplos de estos robots paralelos que se utilizan en la industria se observa en la Figura 1.5.. Dos de los robots paralelos más populares son el Hexápodo Telescópico de Ida utilizado en la mayoría de los simuladores de movimientos (a menudo llamadas "plataformas de movimiento") y el llamado robot Delta, que se utiliza generalmente para un rápido pick-and-place. Mientras que hay un menor número de robots paralelos que los robots en serie en uso, la variedad de robots paralelos es más grande.. Figura 1.5 Robots paralelos usados en la industria Fuente (Cook, 2009).
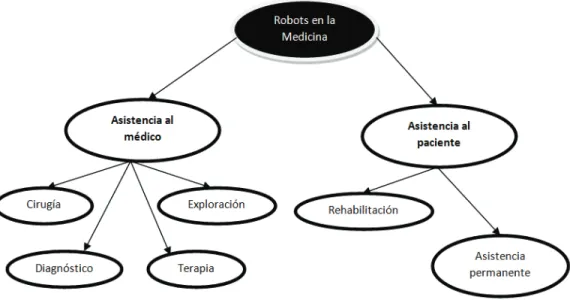
(23) 8. 1.5 APLICACIONES DE LOS ROBOTS Los robots son ampliamente utilizados en tareas repetitivas o peligrosas para el ser humano, además en aquellas que requieren ciertas características como precisión, fuerza, estabilidad, optimización de tareas, multitarea o capacidad de carga. Como se puede ver en la Figura 1.6, estas aplicaciones pueden ser industriales o de servicio y estas a su vez tienen aplicaciones puntuales.. Figura 1.6 Aplicaciones de los robots Elaborado por las autoras, 2016. Dentro de las aplicaciones de los robots está la medicina, donde se aprovecha sus características de precisión, percepción, soporte y clasificación, en dos áreas específicas que son la asistencia al médico y la asistencia al paciente (Barrientos, Webs, Universidad de Murcia, 2008).Como se puede ver en la Figura 1.7, dentro de la aplicación de robots paralelos está la asistencia al paciente en rehabilitación.. Los robots son utilizados para tratar rehabilitación física y operacional. Dentro de la rehabilitación física su mayor aporte es en la de miembros superiores e inferiores..
(24) 9. Figura 1.7 Aplicaciones de los robots en la medicina Elaborado por las autoras, 2016. La rehabilitación se puede realizar a distancia o en el lugar, siendo a distancia desde la comodidad del hogar del paciente, quien a través de un computador e internet se conecta con el centro hospitalario y se simulan movimientos de fuerza y manipulación del miembro.. En cuanto a los robots paralelos, su evolución y aplicaciones a través de su historia se detallan en la Tabla 1.2 (Saravia & López, 2009):. Tabla 1.2 Aplicaciones de los robots paralelos.
(25) 10. Tabla 1.2 Aplicación de los robots paralelos (continuación …). Elaborado por las autoras, 2016. 1.6 MODELADO CINEMÁTICO DEL ROBOT PARALELO No existe una metodología general para modelar un robot paralelo. Sin embargo la tarea no es difícil, dado que en el campo del ensamblaje industrial los robots más populares son aquellos del tipo Delta y Stewart, se analiza en este proyecto el modelado completo del robot basado en estos dos.. En la cinemática de los robots se estudian sus movimientos con respecto a un sistema de referencia dado, la cinemática investiga la descripción analítica del movimiento espacial del robot en función del tiempo y las relaciones que existe entre la posición o referencia y la orientación o posición del extremo final del robot en función de los valores que toman sus articulaciones. (Silva, 2005). El análisis de la cinemática de un mecanismo o robot se lo realiza de dos formas: inversa y directa.. Debido a los lazos de control que tiene, el cálculo de la cinemática directa es compleja y puede tener varias soluciones; el cálculo de la cinemática inversa es más simple en robots paralelos, en la Figura 1.8 se observa la metodología de la cinemática tanto directa como inversa..
(26) 11. Figura 1.8 Metodología de la cinemática Elaborado por las autoras, 2016. 1.6.1 CINEMÁTICA INVERSA DEL ROBOT PARALELO. En la cinemática inversa se determinan las coordenadas de las articulaciones de cada actuador teniendo como datos la posición y orientación de la plataforma móvil.. La cinemática inversa puede analizarse por el método analítico y por el método geométrico, siendo el más fácil de utilizar el segundo, ya que permite determinar una solución para el movimiento del actuador dependiendo de la posición y rotación de la plataforma móvil, tomando como referencia a la plataforma fija.. 1.6.2 CINEMÁTICA DIRECTA DEL ROBOT PARALELO. Con los valores del movimiento de las articulaciones de cada cadena que conforma al robot paralelo se determina cuál es la posición y orientación final de la plataforma móvil, tomando como referencia la plataforma fija. Los métodos numéricos para el obtener la solución de la cinemática directa son los iterativos y polinomiales. En la actualidad también se pueden usar programación de redes neuronales para el cálculo de la cinemática directa de un mecanismo paralelo. Para describir o representar la localización de un objeto en tres dimensiones se usa algebra vectorial y matricial. (González Alvarez & Reinoso Mendoza, 2011).
(27) 12. 1.6.3 ESPACIO DE TRABAJO DEL ROBOT PARALELO. El espacio de trabajo es el campo de acción de la plataforma móvil del robot, es decir, las posiciones que puede alcanzar el extremo del robot. Este campo o volumen se determina considerando el tamaño, forma y tipo de eslabones, la geometría de la plataforma móvil y fija y las limitaciones de movimiento impuestas por el sistema de control.. El espacio de trabajo es un parámetro importante a tomar en cuenta para optimizar las dimensiones del robot. Éste se debe elegir de tal forma que su espacio de trabajo le permita realizar la tarea para la que se construyó. Los puntos más lejanos y los más cercanos a los que debe acceder el robot se alcanzan con orientaciones determinadas.. Entre las ventajas de determinar el espacio de trabajo está que se define el entorno de trabajo del robot, el alcance efector final, se asegura las características cinemáticas que están relacionadas con la interacción del robot y su entorno. (Martínez, 2013). La forma y dimensión del espacio de trabajo está limitada además por las articulaciones tanto pasivas como activas, de la estructura geométrica del robot y los grados de libertad total del mecanismo.. 1.7 MÉTODO DE DENAVIT-HARTENBERG (D-H). Es un procedimiento sistemático matricial que describe la estructura cinemática de una cadena constituida por eslabones y articulaciones, pudiendo determinar las ecuaciones cinemáticas de la cadena completa.. Si se escoge correctamente el sistema de coordenadas de cada articulación con la parametrización D-H, será posible pasar de un sistema al siguiente mediante cuatro transformaciones básicas que van a depender solo de las características geométricas del eslabón y de las articulaciones que los unen..
(28) 13 Son cuatro variables: ángulo de articulación (!" ), distancia de articulación (#" ),. longitud de enlace ($" ) y torsión de enlace (%" ), todos definidos respecto al grado de libertad &.. Los pasos para obtener el modelo mediante el algoritmo de Denavit- Hartenberg son. (Barrientos, Peñin, Blaguer, & Aracil, 2007). DH1. Se enumera los eslabones, 1 (primer eslabón móvil de la cadena) y n (último eslabón móvil), se numerará como eslabón 0 a la base fija de la cadena analizada del robot.. DH2. Se enumera cada articulación comenzando por 1 la correspondiente al primer grado de libertad y acabando en n.. DH3. Se debe localizar el eje de cada articulación, si es rotativa, el eje será su eje de giro, si es prismática, será el eje en el cual se produce el desplazamiento.. DH4. Para trasladarse de 0 a n-1, situar el eje Zi, sobre el eje de la articulación i+1.. DH5. Se sitúa el origen del sistema de la base (S0) en cualquier punto del eje Z0, los ejes X0 e Y0 se colocan dé modo que formen un sistema dextrógiro con Z0.. DH6. Para ir de 1 a n-1, situar el sistema (Si) (solidario al eslabón i) en la intersección del eje Zi con la línea normal común a Zi-1 y Zi, si ambos ejes se cortasen se situaría (Si) en el punto de corte, si fuesen paralelos (Si) se situaría en la articulación i+1.. DH7. Situar el eje Xi en la línea normal común a Zi-1 y Zi.. DH8. Situar el eje Yi de modo que forme un sistema dextrógiro con Xi y Zi..
(29) 14. DH9. Situar el sistema (Sn) en el extremo del robot de modo que Zn coincida con la dirección de Zn-1 y Xn sea normal a Zn-1 y Zn. DH10. Obtener !" como el ángulo que hay que girar en torno a Zi-1 para que. Xi-1 y Xi queden paralelos.. DH11.Obtener di como la distancia, medida a lo largo de Zi-1, que habría que desplazar (Si-1) para que Xi y Xi-1 quedasen alineados.. DH12.Obtener ai como la distancia medida a lo largo de Xi (que ahora coincidiría con Xi-1) que habría que desplazar el nuevo (Si-1) para que su origen coincidiese con (Si). DH13. Obtener %" como el ángulo que habría que girar entorno a Xi (que. ahora coincidiría con Xi-1), para que el nuevo (Si-1) coincidiese totalmente con (Si).. DH14. Obtener las matrices de transformación i-1Ai.. DH15. Obtener la matriz de transformación que relaciona el sistema de la base con el del extremo del robot T = 0Ai, 1A2... n-1An.. DH16. La matriz T define la orientación (sub-matriz de rotación) y posición (submatriz de traslación) del extremo referido a la base en función de las n coordenadas articulares. (Barrientos, Peñin, Blaguer, & Aracil, 2007). Con los parámetros D-H es posible construir la matriz de transformación homogénea total definida como:. '=0. 1-24*2-. ' = ( +)" = ( +)* ( *), ( ,)- .( "/*)". 3-2* 8$93&:(#;(3<9$>&ó? 7=0 565 8$93&:(#;(@;3A@;>9&B$. [ 1.1]. 8$93&:(#;(@<A&>&ó? 7 [ 1.2] CA>$D$.
(30) 15. La matriz A, que pertenece a cada eslabón, se define:. "/*. )" = 'EFG 'EFH '2FI '2FJ. cos !" L cos %" sen !" sen %" sen !" sen !" cos %" cos !" L sen %" cos !" =K M sen %" cos %" M (((((((((((((((((((((((M((((((((( ((((((((((((((((((M. $" cos !" $" sen !" N #" 5. [ 1.3]. 1.8 LOCALIZACIÓN ESPACIAL DEL ROBOT. Para realizar la manipulación del robot es necesario conocer su posición en todo momento, se establece un sistema de coordenadas con el cual se puede localizar cualquier punto en el espacio mediante el vector posición (sistema cartesiano), mediante radio, ángulos de giro (sistema esférico y cilíndrico), como se aprecia en la Figura 1.9.. Figura 1.9 (a) cartesiano, (b) cilíndrico y (c) esférico Elaborado por las autoras, 2016. Para la orientación con respecto a un marco de referencia fijo, se puede utilizar diferentes métodos entre los cuales se tiene:. Matriz de rotación: La DCM o matriz de rotación es una matriz de orden 3x3, donde sus columnas representan los vectores unidad del cuerpo analizado proyectado sobre los ejes del sistema de referencia. (Rivas Gil, 2006). Ángulos RPY y ángulos de Euler: Un cambio de un sistema referencial a otro se lo define usando tres rotaciones sucesivas sobre los diferentes ejes. Se los.
(31) 16. denomina roll, pitch y yaw (rotaciones sobre los ejes X, Y y Z, respectivamente). Los ángulos de Euler se derivan de estoa, cambiando los ejes sobre los que se realizan las rotaciones y el orden en que se tienen en cuenta. (Rivas Gil, 2006). Cuaterniones: En este caso la rotación se considera única sobre un vector definido en el marco de referencia. El vector de cuatro tetradimensional resultante es un cuaternión, cuyos elementos son función de este nuevo vector y la magnitud de la rotación. (Rivas Gil, 2006) La orientación del cuerpo es una función de los ángulos de rotación sobre los diferentes ejes y del orden en que ocurren para que se cumpla el movimiento.. 1.8.1 ÁNGULOS R-P-Y. El sistema 0UVW móvil puede definirse con respecto al sistema 0XYZ fijo a través. de tres ángulos OF !F P llamados roll, pitch y yaw por sus siglas en inglés o balanceo, inclinación y orientación, en la Figura 1.10 se observa estos giros.. Figura 1.10 Ángulos R-P-Y Elaborado por las autoras, 2016. Tomando en cuenta estas rotaciones se obtienen las matrices para cada giro.. [ 1.4].
(32) 17. [ 1.5]. [ 1.6]. La matriz general se consigue al multiplicar las matrices de cada giro, obteniéndose: S. QR = QT UVWQX UYWQZ U[W. [ 1.7]. 1.9 ANATOMÍA DE LA EXTREMIDAD INFERIOR Para realizar el análisis de la anatomía de la rodilla se debe tomar en cuenta que forma parte del sistema de locomoción inferior. La estructura del miembro inferior a grandes rasgos se divide en tres segmentos: cadera, pierna y pie; como se puede ver en la en la Figura 1.11, se hace una breve descripción de cada parte.. Figura 1.11 Estructura ósea y muscular de la pierna humana Fuente (Hernández Stengete, 2008).
(33) 18. 1.9.1 CADERA. La cadera es la articulación proximal del miembro inferior y se encuentra en la base o raíz, tiene la función de ser el soporte de todo el peso del cuerpo, además orienta a toda la pierna en su espacio de trabajo, posee tres ejes y tres grados de libertad. Estos ejes son transversal, anteroposterior y vertical. La cadera está conformada por dos huesos, llamados iliacos o coxales, soldados entre sí en la sección anterior y unidos por el sacro en la sección posterior. El hueso iliaco es plano y se articula con el sacro, formándose una cuña entre los dos iliacos. Esta unión constituye el cinturón pélvico, donde se localizan órganos importantes, existe pequeñas diferencias de forma entre la cadera masculina y femenina como se puede observar en la Figura 1.12.. Figura 1.12 Huesos de la cadera masculina y femenina Fuente (Rodríguez, 2011). 1.9.2 PIERNA. La pierna incluye a la rodilla, la articulación más grande y compleja del esqueleto humano ya que en ésta se unen el fémur, la tibia y la rótula; Soporta el peso del cuerpo humano y permite su movilidad para caminar o correr y para dar la posición adecuada al pie de acuerdo a la irregularidad del terreno. En la Figura 1.13 se observa la rodilla con sus diferentes componentes..
(34) 19. Figura 1.13 Vista de la articulación de rodilla 1. Cuádriceps 2. Fémur 3. Rótula 4.8.9.10.11.12 Ligamentos 5. Menisco 6. Peroné 7. Tibia Fuente (García & Góngora). Los tres huesos que forman la rodilla son el fémur, la rótula y la tibia; el peroné no se considera parte de la articulación. A éstos se unen los meniscos, tendones, ligamentos y cóndilos femorales, que ayudan o limitan los grados de movimiento de la articulación.. 1.9.3 PIE. El pie es parte del miembro inferior discal de la pierna, es el soporte esencial para el desplazamiento humano, sus funciones básicas son: adaptarse a superficies irregulares, absorber el impacto constante, funcionar como palanca rígida que crea la fuerza de caminar y trasladar la fuerza de rotación de la cadera.. Se compone de tres grupos de huesos, estos son el tarso, metatarso y falanges, los músculos y tendones trabajan junto con los huesos, ligamentos y articulaciones para realizar sus movimientos.. La articulación del tobillo está compuesta por la parte baja de la tibia y el peroné formando el maléolo interno y maléolo externo respectivamente en combinación con los huesos de del retropié: calcáneo y astrágalo. En la Figura 1.14 se puede ver una imagen con las distintas articulaciones que forman el tobillo..
(35) 20. Figura 1.14 Vista anterior y lateral de un pie humano Fuente (Asencio, s.f.). 1.10 MOVIMIENTOS DE LA EXTREMIDAD INFERIOR No se puede tratar independientemente el movimiento de la rodilla pues forma parte de la extremidad inferior, por lo que se detallan los movimientos de la cadera, rodilla y tobillo.. 1.10.1 ARTICULACIÓN DE LA CADERA. Los movimientos de la cadera son: Flexo-extensión, Abducción-aducción, Rotaciones, Los movimientos varían dependiendo de la flexibilidad de los músculos.. El movimiento de flexión se analiza con la persona en posición vertical, si levanta la pierna estirada su ángulo de amplitud es de 90° máximo, como se muestra en la Figura 1.15 (a); cuando se levanta la pierna con la rodilla flexionada el ángulo máximo es 120°, Figura 1.15 (b), pero puede llegar a 145° si se refuerza con ayuda de los brazos Figura 1.15 (c)..
(36) 21. Figura 1.15 Movimiento de flexión de la cadera Fuente (Bernaldez, 2016). El movimiento de extensión tiene menor movimiento articular, la masa muscular del glúteo y la tensión del ligamento ileofemoral limitan este movimiento.. El rango de movimiento articular es 10° en activo Figura 1.16 (a), y con ayuda, de 20°a 30° en pasivo Figura 1.16 (b) y (c), la extensión aumenta si la cadera se mueve hacia atrás.. Figura 1.16 Movimiento de extensión de la cadera Fuente (Pérez, 2011).
(37) 22. La abducción o separación es un movimiento transversal. La amplitud en abducción es 45° y en aducción 20° como se puede apreciar en la Figura 1.17.. Figura 1.17 Movimiento de abducción de la cadera Fuente (DeLamo, 2016). El movimiento de rotación de la cadera se analiza con la persona acostada boca abajo y la pierna flexionada 90° hacia atrás. En la Figura 1.18 se observa que la rotación longitudinal externa hacia afuera es 30° y hacia adentro 60°.. Figura 1.18 Movimiento de rotación externa de la cadera Fuente (Pérez, 2011).
(38) 23. 1.10.2 ARTICULACIÓN DE LA RODILLA. La rodilla es una articulación que une el muslo con la pierna, sus movimientos son complejos y se puede dividir a su vez en dos articulaciones, aunque funcionalmente se la puede considerar como una. La rodilla cuenta con tres grados de libertad, dependiendo del eje de rotación: el de flexo extensión, en el eje longitudinal de rotación cuando la rodilla está flexionada, este movimiento es imposible en extensión total; en eje anteroposterior solo existe flexión de rodilla que permite regular su distancia con respecto al piso, y el de rotación sobre el eje longitudinal cuando está flexionada.. En el movimiento de extensión la cara posterior de la pierna se aleja del muslo, se tiene la extensión relativa que se hace durante la marcha, En la Figura 1.19 se alcanza una extensión máxima en la posición de referencia (a), también puede haber extensión máxima cuando no se flexiona la rodilla aunque gire las otras articulaciones de la extremidad inferior.. Figura 1.19 Articulación de la rodilla en su posición de referencia Fuente (Pérez, 2011). El movimiento de flexión es contrario al de extensión, la flexión activa alcanza un ángulo de 140°, si la cadera está también en flexión, pero alcanza 120° si la cadera.
(39) 24. está en extensión, En la Figura 1.20 se observa la flexión de la rodilla con flexión activa, en el presente trabajo se hará referencia solo a este movimiento, en la flexión pasiva la rodilla puede alcanzar 160° permitiendo el contacto entre talón y nalga.. Figura 1.20 Flexión de la rodilla Fuente: (Sastre, s.f.). 1.10.3 ARTICULACIÓN DEL TOBILLO. El movimiento del tobillo permite: flexo-extensión, inversión, eversión y rotaciones. En extensión el dorso del pie se aleja de la cara anterior de la pierna, cuando este ángulo es agudo, su amplitud es de 20 a 30°, cuando este ángulo es obtuso, se puede afirmar entonces que se trata de una flexión, su amplitud es de 30 a 50°. Este movimiento se lo observa en la Figura 1.21.. Figura 1.21 Movimiento de flexión y extensión del tobillo Fuente (Bernaldez, 2016).
(40) 25. En el movimiento de eversión (supinación) el pie se mueve hacia adentro y arriba con un ángulo máximo de 20° y el de inversión (pronación) hacia afuera y arriba con un ángulo no mayor a 30° esto se lo puede ver en la Figura 1.22.. Figura 1.22 Movimientos de eversión e inversión del pie Fuente (Bernaldez, 2016). El movimiento de aducción consiste en girar hacia afuera con un ángulo de 20° y el de abducción el ángulo es de 10°, con referencia al eje perpendicular al piso como indica la Figura 1.23.. Figura 1.23 Movimiento del pie abducción y aducción Fuente (Bernaldez, 2016).
(41) 26. 2 CAPÍTULO 2 DISEÑO CINEMÁTICO DEL ROBOT PARALELO 2.1 INTRODUCCIÓN. El diseño cinemático del robot paralelo comprende varias fases, primero se define la estructura física a usarse, luego se obtiene el algoritmo de D-H para definir las ecuaciones de la cinemática inversa y directa.. Los robots o manipuladores paralelos con menos de 6 grados de libertad tienen la ventaja de tener un diseño mecánico más simple, un bajo costo de fabricación, un espacio de trabajo más amplio y actuadores simples, entre los más desarrollados se encuentran los robots paralelos con 3 grados de libertad que en la actualidad son más utilizados en la industria.. Los robots de 4 y 5 grados de libertad (GDL) no pueden ser construidos con cadenas cinemáticas idénticas como los de 3 grados de libertad por lo que aún están en desarrollo, aunque en la actualidad hay robots paralelos con 4 GDL con cadenas cinemáticas no simétricas como las presentadas por Hesselbach en 1998, que desarrolló un robot con dos cadenas cinemáticas asimétricas para el corte de paneles convexos de cristal, la de Lenarcit en el 2000 la cual tenía una cadena cinemática prismática–esférica (PS) y tres cadenas cinemáticas esférica– prismática–esférica (EPE) para simular el hombro de un humanoide, con un grado de libertad rotacional y tres traslacionales. En 1998 Wang y Gosselin investigaron la cinemática de un robot paralelo de 4 GLD con 4 cadenas cinemáticas Rotacional– Universal–Esférica (RUE) y una cadena cinemática Rotacional–Esférica (RE) pasiva. (Rueda, 2008).. Un manipulador con cadenas cinemáticas no simétricas crea espacios de trabajo no simétricos, lo cual hace que el análisis sea complejo; en los años 80 se estudió una estructura robusta tipo paralelogramo para robots paralelos, a esta estructura se le dio el nombre de robot Delta. La Figura 2.1 muestra un esquema del robot.
(42) 27. Delta, se observa que las cadenas cinemáticas que unen las plataformas son idénticas y el brazo central da al robot un cuarto grado de libertad que es rotatorio.. Figura 2.1 Robot Delta Fuente (ABB, s.f.). 2.2 MOVIMIENTOS DEL ROBOT PARALELO Con los movimientos de la cadera, pie y rodilla explicados en el capítulo anterior se realiza en la Tabla 2.1 un resumen de los valores máximos.. Tabla 2.1 Movimientos de la pierna. Elaborado por las autoras, 2016. Las articulaciones de la cadera y tobillo tienen 4 grados de libertad, en cambio la rodilla tiene 3 grados de libertad, por lo que el robot paralelo debe tener 4 grados de libertad para generar los movimientos que permitan la rehabilitación de la extremidad inferior..
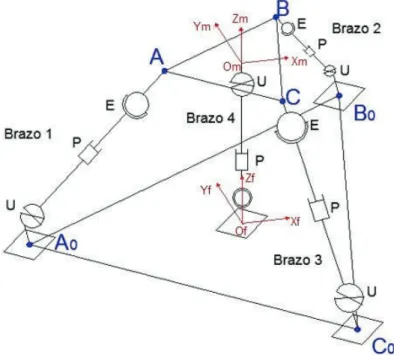
(43) 28. 2.3 TOPOLOGÍA DEL ROBOT PARALELO. Un primer esquema del robot paralelo incluye dos plataformas, una fija y una móvil, de forma triangular, las cuales están unidas entre sí por cadenas cinemáticas con distintos tipos de articulaciones para generar los movimientos en la rodilla para su rehabilitación.. El robot paralelo a desarrollar dispone de 4 cadenas: tres de tipo Universal– Prismática–Esférica (UPE), las cuales unen los vértices de las plataformas; y una Rotacional–Prismática–Universal (RPU), que se encuentra en el centro. Está constituido por 10 eslabones (incluidas las plataformas fija y móvil) y 12 articulaciones o pares cinemáticos, tal como se muestra en la Figura 2.2.. Figura 2.2 Topología del robot 3 UPE – RPU Elaborado por las autoras, 2016. Las articulaciones tienen diferentes grados de libertad, es así que, las articulaciones prismática y rotacional tienen un grado de libertad; las universales, dos; y las esféricas, tres..
(44) 29. Para determinar los grados de libertad que posee el robot con estas cadenas, se utilizará el criterio de Kutzbach, el cual indica que “cuando las restricciones de las articulaciones se restan de los grados de libertad de los eslabones no conectados, se encuentra la movilidad (grados de libertad) del mecanismo conectado” (Shigley & Uicker, 2001), que para el caso de un mecanismo espacial se calcula con la siguiente ecuación, R = \U] L ^W L _`^ L a`b L d`d L b`a L `_. [ 2.1]. Donde: m = grados de libertad n = número de eslabones ji = número de articulaciones con i grados de libertad. Dados los valores del robot paralelo, n = 10, j1 = 5, j2 = 4, j3 = 3, el número de los diferentes movimientos o grados de libertad es: f = gU5M L 5W L hUhW L iUiW L jUjW L kUMW L M = gUlW L kh L 5g L l f=i. 2.4 ALGORITMO DE DENAVIT – HARTENBERG (D-H) APLICADO AL ROBOT PARALELO. El Robot 3UPE-RPU es un sistema complejo, por lo que se han definido ejes iniciales en la plataforma fija y en la plataforma móvil, los cuales son coincidentes en la dirección de los ejes X, Y y Z, como se puede observar en la Figura 2.3. Además se ha establecido un eje en la base de cada cadena UPE..
(45) 30. Figura 2.3 Ejes del robot Elaborado por las autoras, 2016. Cada brazo del robot se analiza por separado, por lo que en cada brazo UPE se enumeran los eslabones, colocando 0 en la plataforma fija y llegando a 3 en la plataforma móvil, como se muestra en la Figura 2.4. De la misma forma, se establece la numeración de los eslabones en el brazo RPU.. Figura 2.4 Enumeración de eslabones y articulaciones Elaborado por las autoras, 2016.
(46) 31. 2.4.1 ANÁLISIS DE CADENA UPE. Después de enumerar cada eslabón de la cadena UPE, se colocan los ejes de coordenadas en cada articulación teniendo en cuenta el número de grados de libertad que posee cada una de ellas. La articulación prismática tiene un grado de libertad; las universales, dos grados de libertad rotacionales perpendiculares entre sí; las esféricas, tres grados de libertad también perpendiculares. En total, cada cadena UPE posee seis grados de libertad. El primer sistema de coordenadas que se coloca es el de la base m+ L p+ q+ r+ con. r+ en la dirección del eje de movimiento del grado de libertad 1. A continuación se. colocan los ejes r" en los ejes de movimiento de los grados de libertad & t 5 (& = 5. h) como se observa en la Figura 2.5.. Figura 2.5 Ejes Z en dirección del movimiento de la cadena UPE Elaborado por las autoras, 2016. Luego se establece el origen de coordenadas i-ésimo en la intersección de los ejes. r" y r"/* o en la intersección de las normales comunes a r" y r"/* . En seguida se. establece el eje p" , el cual es perpendicular al plano formado por los ejes r" y r"/*. lo que se aprecia en la Figura 2.6..
(47) 32. Figura 2.6 Definición del origen y del eje X en la cadena UPE Elaborado por las autoras, 2016. Se establece el eje q" aplicando la regla de la mano derecha y completando el. sistema de coordenadas, mostrado en la Figura 2.7.. Figura 2.7 Ley de la mano derecha para establecer el eje Y en la cadena UPE Elaborado por las autoras, 2016.
(48) 33 Por último, el sistema de coordenadas mu L pu qu ru se hace coincidir con el eje de. la plataforma móvil ya que ésta corresponde al último eslabón, tal como se muestra en la Figura 2.8, que contiene todos los ejes correspondientes a la cadena UPE.. Figura 2.8 Ejes rotacionales y traslacionales de la cadena UPE Elaborado por las autoras, 2016. Colocados los ejes de cada grado de libertad se obtienen los parámetros D-H que relacionan los sistemas de coordenadas del grado de libertad de la articulación con respecto al sistema de coordenadas del grado previo. Los grados de libertad se. simbolizan con la letra v. El grado de libertad v* se encuentra sobre el eje r+ . Para. hallar los parámetros D-H de este par se analiza en la siguiente Tabla 2.2.. Tabla 2.2 Parámetros D-H del primer par ITEM %* $*. #* !*. DESCRIPCIÓN Ángulo de rotación desde el eje r+ hasta el eje r* respecto del eje p*. Distancia del origen m+ a la intersección entre los ejes r+ y p* a lo largo de p* Distancia del origen m+ a la intersección entre los ejes r+ y p* a lo largo de r+. Ángulo de rotación desde el eje p+ hasta el eje p* respecto del eje r+ . Al ser una articulación rotacional, este parámetro es variable.. Elaborado por las autoras, 2016.
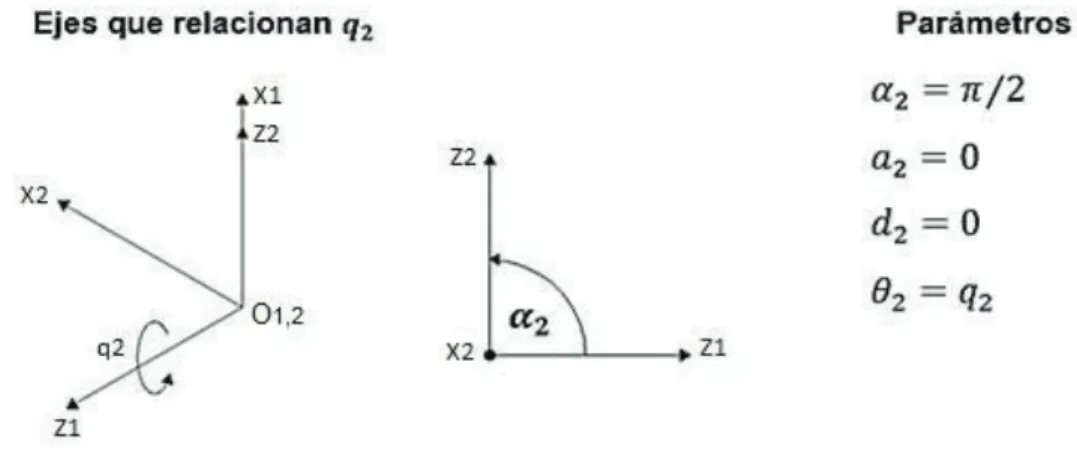
(49) 34. Este análisis se presenta en la Figura 2.9. {m+ L p+ q+ r+ } ( w {m* L p* q* r* } par U, primer par R.. Figura 2.9 Parámetros D-H del grado q1 del brazo UPE Elaborado por las autoras, 2016. En forma análoga al análisis del primer grado de libertad, se procede con el resto de articulaciones de la cadena UPE, que se muestra desde la Figura 2.10 hasta la Figura 2.14. {m* L p* q* r* } w {m, L p, q, r, } par U, segundo par R. Figura 2.10 Parámetros D-H del grado q2 del brazo UPE Elaborado por las autoras, 2016.
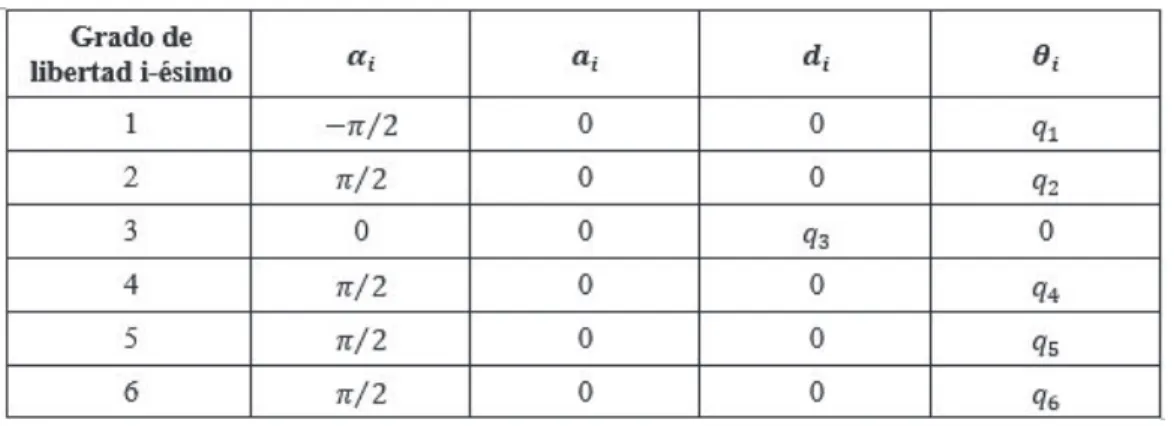
(50) 35 {m, L p, q, r, } w {m- L p- q- r- } par P. Figura 2.11 Parámetros D-H del grado q3 del brazo UPE Elaborado por las autoras, 2016. {m- L p- q- r- } w {mx L px qx rx } par E, primer par R. Figura 2.12 Parámetros D-H del grado q4 del brazo UPE Elaborado por las autoras, 2016. {mx L px qx rx } w {my L py qy ry } par E, segundo par R. Figura 2.13 Parámetros D-H del grado q5 del brazo UPE Elaborado por las autoras, 2016.
(51) 36 {my L py qy ry } w {mu L pu qu ru } par E, tercer par R. Figura 2.14 Parámetros D-H del grado q6 del brazo UPE Elaborado por las autoras, 2016. En la Tabla 2.3, se resumen los parámetros D–H de la cadena UPE, que se aplica para los tres brazos externos del robot.. Tabla 2.3 Resumen de los parámetros D-H de las cadenas UPE. Elaborado por las autoras 2016. 2.4.2 ANÁLISIS DE CADENA RPU. La cadena RPU consta de cuatro grados de libertad. La articulación rotacional presenta un grado de libertad rotacional; la prismática, uno traslacional; y la universal, dos rotacionales perpendiculares entre sí.. Al igual que en la cadena UPE, después de enumerar cada eslabón de la cadena RPU, se colocan los ejes de coordenadas en cada articulación..
(52) 37. El sistema de coordenadas de la base m+ L p+ q+ r+ coincide con el sistema mz L. pz qz rz de la plataforma fija y r+ está ubicado en la dirección del eje de movimiento. del grado de libertad 1. Los ejes r" se colocan en los ejes de movimiento de los grados de libertad & t 5 (& = 5. j). Como se lo observa en la Figura 2.15.. Figura 2.15 Ubicación de los ejes Z en la cadena RPU Elaborado por las autoras, 2016. El origen de coordenadas i-ésimo se coloca en la intersección de los ejes r" y r"/*. o en la intersección de las normales comunes a r" y r"/*, observado en la Figura 2.16..
(53) 38. Figura 2.16 Definición del origen de coordenadas para la cadena RPU Elaborado por las autoras, 2016. El eje p" se ubica perpendicular al plano formado por los ejes r" y r"/*, esto se observa en la Figura 2.17.. Figura 2.17 Definición del eje X en la cadena RPU Elaborado por las autoras, 2016.
(54) 39 Se establece el eje q" aplicando la regla de la mano derecha y completando el. sistema de coordenadas. Mostrada en la Figura 2.18.. Figura 2.18 Ley de la mano derecha para establecer el eje Y en la cadena RPU Elaborado por las autoras, 2016. Por último, el sistema de coordenadas mx L px qx rx se hace coincidir con el eje de la plataforma móvil que es el último eslabón. La ubicación final de los ejes se presenta en la Figura 2.19.. Figura 2.19 Ejes rotacionales y traslacionales de la cadena RPU Elaborado por las autoras, 2016.
(55) 40. La obtención de los parámetros D-H para la cadena RPU se presentan desde la Figura 2.20 hasta la Figura 2.23. {m+ L p+ q+ r+ } w {m* L p* q* r* } par R. Figura 2.20 Parámetros D-H del grado q1 del brazo RPU Elaborado por las autoras, 2016. {m* L p* q* r* } w {m, L p, q, r, } par P. Figura 2.21 Parámetros D-H del grado q2 del brazo RPU Elaborado por las autoras, 2016. {m, L p, q, r, } w {m- L p- q- r- } par U, primer par R. Figura 2.22 Parámetros D-H del grado q3 del brazo RPU Elaborado por las autoras, 2016.
(56) 41 {m- L p- q- r- } w {mx L px qx rx } par U, segundo par R. Figura 2.23 Parámetros D-H del grado q4 del brazo RPU Elaborado por las autoras, 2016. En la Tabla 2.4, se resumen los parámetros D–H de la cadena RPU, del brazo central del robot.. Tabla 2.4 Resumen de los parámetros D-H de la cadena RPU. Elaborado por las autoras, 2016. Con los parámetros D-H es posible construir la matriz de transformación homogénea total, definida por la ecuación 1.1.. 2.5 CINEMÁTICA INVERSA DEL ROBOT 2.5.1 POSICIÓN. articulaciones {v* F v, F v- F vx F vy F vu } en cada brazo, conocidas la posición y la La cinemática inversa establece las coordenadas generalizadas de las. orientación de la plataforma móvil {6| F ~| F :| F PF !F O}..
(57) 42 Las articulaciones se dividen en dos grupos. Las articulaciones v* F v, F v- de los. brazos UPE y v* F v, del brazo central RPU se consideran activas porque el. movimiento del robot depende específicamente de ellas; por otra parte, vx F vy F vu de los brazos UPE y v- F vx del brazo central RPU son pasivas, están ubicadas. directamente bajo la plataforma móvil y su posición depende de las articulaciones. activas. Estas articulaciones pasivas tienen una utilidad limitada, por lo que se las excluye de cálculos y simulación.. 2.5.1.1 Ecuaciones de restricción. Para iniciar el análisis de las articulaciones activas, se numeran los brazos del 1 al 4. Esta numeración hace la diferencia de los grados de libertad ya que forma parte de la nomenclatura utilizada más adelante. Para determinar las coordenadas de las articulaciones v* F v, F v- de los brazos UPE. y v* F v, del brazo RPU se analizan los puntos extremos de los brazos, donde los. extremos de la plataforma móvil se conocen como las posiciones A, B, C y los extremos de la plataforma fija son A0, B0 y C0, como se muestra en la Figura 2.24.. Figura 2.24 Determinación de los puntos de análisis del mecanismo del robot Elaborado por las autoras, 2016.
(58) 43. Tal como se muestra en la Figura 2.25, desde el origen de coordenadas de la plataforma fija, se define una distancia 1 a la que se encuentran las bases )+ F + F +. de los brazos UPE, además + (~(+ tienen un ángulo de inclinación (con el eje X.. Por otra parte, en la plataforma móvil la distancia desde el origen hasta los extremos )F F de los brazos UPE es 1| .. Figura 2.25 Distancias R y Rm Elaborado por las autoras, 2016. Para hallar la relación entre el sistema de referencia fijo mz L pz qz rz y el sistema. ubicado en cada una de las bases de los brazos UPE (A0, B0 y C0) se obtiene por separado la matriz de rotación, en la que ! = M y % = lM y la matriz de posición,. que para cada punto es diferente respecto al sistema de referencia fijo, siendo la distancia R y la dirección dependiente de β. z. cos ! 1 = sen ! M. L cos % sen ! cos % cos ! sen %. Brazo UPE1 z. 5((((((M((((((M 1 + = M((((((M L 5 M((((((5((((((M. Brazo UPE2 z. 5((((((M((((((M 1+ = M((((((M L 5 M((((((5((((((M. sen % sen ! L sen % cos ! cos %. $ cos ! 3 = $ sen ! # L1 3 = M M 1><A 3 = 1A;? M.
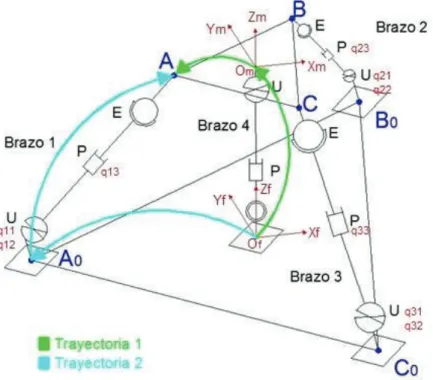
(59) 44. Brazo UPE3 z. 1><A 3 = L1A;? M. 5((((((M((((((M 1 + = M((((((M L 5 M((((((5((((((M. La orientación de la plataforma móvil se toma respecto a los ejes fijos con la matriz de rotación de ángulos RPY (Roll – Pitch – Yaw), detallada en la ecuación 1.7.. El análisis de los grados de libertad se realiza en forma independiente para cada brazo. Es así que, en el Brazo 1 el problema se centra en definir la posición del punto final A. Para alcanzar este punto se pueden trazar dos trayectorias. Una a través de los puntos Of – Om – A y la segunda, desde el eje fijo a la base del brazo 1 hasta A Of – A0 – A, tal como se muestra en la Figura 2.26.. Figura 2.26 Trayectorias para definir la posición del punto A Elaborado por las autoras, 2016.
(60) 45. De este modo, se igualan los desplazamientos definidos por las trayectorias para alcanzar el punto A, las que se expresan: 6| L1| L1 z z ~| t 1| M = 1+ +1* Uv** W *1, Uv*, W ,1- Uv*- W t M :| M M. De la trayectoria 1, el miembro izquierdo de la ecuación, se tiene: 6| L1| z ~| t 1| M = :| M. 6| cos ! cos O ~| ( t cos ! sen O :| L sen !. sen P sen ! cos O L cos P sen O sen P sen ! sen O t cos P cos O sen P cos !. 6| 6| L1| cos ! cos O L1| cos ! cos O = ~| t L1| cos ! sen O = ~| L1| cos ! sen O :| :| t 1| sen ! 1| sen !. cos P sen ! cos O t sen P sen O L1| cos P sen ! sen O L sen P cos O M cos P cos ! M. De la trayectoria 2, miembro derecho, se tiene: L1 z 1+ +1* Uv** W *1, Uv*, W ,1- Uv*- W t M M M M 5. M cos v** L5 sen v** M M. 5 = M M. M M 5. v*- cos v** sen v*, L1 M v*- cos v** sen v*, Lv*- cos v*, t M v sen v sen v L5 *** *, = v*- sen v** sen v*, v*- cos v*, M M. 5 = M M. =. M M 5. M cos v** L5 sen v** M M. M M L5. M M L5. v*- cos v** sen v*, L 1 Lv*- cos v*, v*- sen v** sen v*,. L sen v** cos v*, cos v** sen v*, M M. M sen v*, L1 L cos v*, M t M v*M M. 5 = M M. M M 5. L sen v** v*- sen v*, L1 cos v** Lv*- cos v*, t M M M M.
Figure



+7


Documento similar
El nuevo Decreto reforzaba el poder militar al asumir el Comandante General del Reino Tserclaes de Tilly todos los poderes –militar, político, económico y gubernativo–; ampliaba
quiero también a Liseo porque en mi alma hay lugar para amar a cuantos veo... tiene mi gusto sujeto, 320 sin que pueda la razón,.. ni mande
En estos últimos años, he tenido el privilegio, durante varias prolongadas visitas al extranjero, de hacer investigaciones sobre el teatro, y muchas veces he tenido la ocasión
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
En suma, la búsqueda de la máxima expansión de la libertad de enseñanza y la eliminación del monopolio estatal para convertir a la educación en una función de la
Pero la realidad se impone por encima de todo; la misma Isidora es consciente del cambio: «Yo misma conozco que soy otra, porque cuando perdí la idea que me hacía ser señora, me
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
