Benemérita Universidad Autónoma de Puebla
Facultad de Ciencias Físico Matemáticas
Posgrado en Ciencias Matemáticas
Regularización del problema de Cauchy para la
ecuación de Laplace en un cilindro
T E S I S
Que para obtener el grado de:
Maestro en Ciencias Matemáticas
Presenta:
Lic. Eduardo Hernández Montero
Director de Tesis:
Dr. Andrés Fraguela Collar
Agradezco a mi asesor por el respaldo académico y humano,
a mis sinodales y oponente por toda la atención brindada,
a la SIEP, responsable y auxiliares, por un compromiso efectivo con la vida académica,
Introducción
SeaΩ una región conductora homogénea enR3, con una cavidad y
sin fuentes de actividad.
Considérese ahora el problema de identificar el valor de un potencial
uen la frontera interior de Ω,ΓD, a partir de datos conocidos deuy la corriente en la frontera exterior deΩ,ΓN; problema al que en lo sucesivo se referirá como el problema de identificación del dato de Dirichlet. Este problema es una simplificación del problema inverso electrocardiográfico, a saber:
Identificar el potencial epicardial a partir de mediciones de potencial y corriente en la superficie del torso de un individuo.
En la práctica, la región entre la superficie del corazón y la del torso de un individuo, es una región conductora no homogénea y existe pre-sencia de fuentes de actividad eléctrica, como los pulmones por ejemplo. El problema de identificación; sin embargo, es una simplificación de uso corriente en la práctica, debido a (ver[6]):
Ωmodela la región comprendida entre la superficie del corazón y la del torso de un individuo.
La conductividad del aire que circunda al individuo es nula, por lo que puede suponerse que es nula la corriente en la superficie del torso.
Se acepta que el problema inverso elecrocardiográfico puede ser modelado suponiendo una conductividad promedio en Ω. Es posible aproximar mediciones continuas de u|Γ
D, a partir
de mediciones electrocardiográficas adecuadas, tomadas en la superficie del torso del individuo.
Existen técnicas conocidas que, en un electrocardiograma per-miten filtrar actividad eléctrica ajena al propio corazón del in-dividuo.
La inmediata formulación matemática del problema de identificación descrito es como un problema de Cauchy, como el problema de evaluar
u|Γ
D, dondeues la solución de un problema de Cauchy de la forma
ii INTRODUCCIÓN
La relevancia práctica del problema inverso electrocardiográfico, ra-dica en la importancia que tiene el potencial epicardial en el diagnóstico y tratamiento de enfermedades cardíacas; no obstante, la formulación matemática del problema presenta inconvenientes significativos que no pueden ser tomados a la ligera:
En general, dado un par arbitrario (ϕ, ψ) de funciones de cua-drado integrable enΓN, sólo puede garantizarse la existencia de solución local en una vecindad de ΓN, que no necesariamente contiene a ΓD. En general no necesariamente tiene sentido la expresión u|Γ
D.
El problema de identificación es mal planteado; es decir, supo-niendo que para el par (ϕ, ψ) exista solución del problema de Cauchy en todo el dominioΩ, entonces u|Γ
D no depende
conti-nuamente del dato de Cauchy enΓN. El problema de Cauchy en realidad es un tipo de problema que se conoce como severamente mal planteado.
Investigadores como A. Fraguela y J. Henry buscan alternativas para resolver el problema de identificación, sin olvidar buscar que sea asequi-ble su implementación numérica, requerida en las aplicaciones médicas. El presente trabajo de tesis se tiene su origen en aceptar una hipó-tesis A. Fraguela y J. Henry, aún no probada; se cree que bajo cambios de coordenadas adecuados, es posible llevar aΩen una región cilíndrica, donde el problema de identificar u|Γ
D es equivalente a resolver un
pro-blema análogo en un cilindro, donde el propro-blema consista en identificar el valor de un potencial en una de las bases del cilindro, siendo conocida información del potencial y la corriente en el resto de la frontera:
Identificar φ= u|Γ
a, dondeΩes una región cilíndrica, Σel costado deΩ, mientras queΓ0es la base,Γala tapa yues solución del problema de Cauchy:
Esta hipótesis busca generalizar un hecho que es conocido para re-giones planas (Ω una región en R2), donde la equivalencia pueda ser
INTRODUCCIÓN iii
Figura 1. Esquema de equivalencia entre problemas de Cauchy para regiones cilíndricas y anulares en el plano.
Naturalmente se formulan preguntas como si realmente es posible extender de alguna forma esta relación a dominios análogos en dimen-siones mayores y si , de ser posible, alguna de las formulaciones ofrece ventajas de implementación numérica frente a la otra.
Este trabajo puede considerarse como la antesala para la respuesta a estas preguntas, pues, en esa dirección, es averiguar si la formulación del problema de Cauchy en un cilindro ofrece ventajas frene a la formulación en una región con una cavidad, considerando como primer intento aquel en que la condición de Dirichlet enΣes nula.
Una de las principales formas en que se aborda el problema en re-giones cilíndricas es mediante la teoría de Control, como lo hacen Ben Abdaet al. en [1]. Sabiendo que es mal planteado el problema asociado de identificación de datos de frontera, como se expone en [5, 2].
En [1] se plantea una formulación operacional del problema de iden-tificación del dato de Dirichlet y una solución tipo Tikhonov como pro-blema mal planteado; sin embargo, la principal problemática es que este problema inverso es del tipo exponencial o severamente mal planteado, suelen ser requeridas herramientas especializadas de la teoría general de regularización (ver [4, 14]).
iv INTRODUCCIÓN
un problema importante, debido a que para conocer en forma explícita la velocidad de convergencia de un algoritmo de regularización tipo Tik-honov, por ejemplo, dada una medición del dato de salida, suele ser necesario tener la certeza de que la solución exacta del problema de identificación del dato de Dirichlet tiene ciertas propiedades de suavidad, informacióna priori, que en la práctica no siempre pueden garantizarse cuando se trata de aplicaciones médicas.
Como resultado de la colaboración directa entre A. Fraguela Collar1
y los autores de [1], se considera que, aún es necesario brindar especial atención a la técnica de regularización empleada, por lo que la etapa final de este trabajo es dedicada a ello en su totalidad.
Aquí se presenta una forma de abordar el problema de Cauchy para la ecuación de Laplace en una región cilíndrica en general, llevándolo a una formulación operacional como problema inverso, mediante la que se evidencia el mal planteamiento exponencial del problema de identifica-ción del dato de contorno y, a partir de ella, se presenta una técnica de regularización por truncamiento adecuada, además de perspectivas de investigación para esquemas de regularización posteriores.
La forma que aquí se presenta para la obtención de soluciones apro-ximadas del problema de identificación del dato de Dirichlet, presenta ventajas respecto de la informacióna priori que se considera suficiente para lograr acotaciones explícitas del error de regularización; no obs-tante, previamente se requiere resolver el problema de determinar las funciones y valores propios del operador de Laplace definido enΓa.
Este trabajo ejemplifica una metodología para resolver problemas inversos que propone A. Fraguela, a partir de la cuál se llega a una completa formulación operacional del problema de identificación del dato de Dirichlet: resolver una ecuación de la formaAφ=ρ, dadoρy siendo
Aun operador lineal y compacto.
Los principales logros de este trabajo de tesis son:
Una definición clara en sentido matemático de lo que se entiende por un dato de Cauchy exacto.
Caracterización en regiones cilíndricas de los pares(φ, ψ)enΓa para los cuales tiene sentido la expresión u|Γ
0.
Una estrategia de regularización admisible que, en comparación con los métodos para problemas exponencialmente mal plantea-dos, requiere informacióna priori“más débil” que las condiciones de fuente logarítmica sobre el datoφ.
1Adscrito al cuerpo académico de Modelación Matemática y Ecuaciones
Índice general
Introducción i
Índice de figuras vii
Capítulo 1. Formulación operacional del problema de Cauchy 1
1. Preliminares 2
2. Problema auxiliar de contorno, problema directo 7 3. Ecuación operacional equivalente al problema de Cauchy 13 4. Forma de serie para soluciones débiles en regiones cilíndricas 17
Capítulo 2. Regularización de la formulación operacional del
problema de Cauchy en regiones cilíndricas 29
1. Truncamiento 31
2. Perspectivas de regularización 36
Conclusiones 39
Apéndice A. 41
Bibliografía 45
Índice de Notación 47
Índice alfabético 49
Índice de figuras
1. Esquema de equivalencia entre problemas de Cauchy para
regiones cilíndricas y anulares en el plano. iii
1. Ejemplo ficticio de p0, para 5 ordenes distintos de magnitud de δ que sólo pretende ser ilustrativo la elección dep0. Las constantesC0 yC1 fueron elegidas sólo para hacer evidente el comportamiento cualitativo de Kδ,p, en función dep, para el caso en que se verificakξke=kϕk2/n= 1. 36
Capítulo 1
Formulación operacional del problema de
Cauchy
En el presente capítulo se muestra el desarrollo necesario para probar que, resolver en un sentido débil el problema de identificación del dato de Dirichlet,φ, para la ecuación de Laplace en una región cilíndrica dado el par(ϕ, ψ), descrito en la introducción de este trabajo, es equivalente a resolver una ecuación operacional de la forma
Aφ=ϕ−A0ψ;
donde (ϕ, ψ) es un dato de Cauchy exacto, mientras que A yA0 serán operadores lineales y compactos entre espacios normados.
El capítulo se estructura en cuatro secciones, la primera de las cuales es un preliminar de los resultados que serán de mayor relevancia en el desarrollo del propio capitulo, todos conocidos del análisis funcional.
En la segunda y tercera sección son introducidas las definiciones básicas y las demostraciones esenciales de la formulación operacional referida. Se prueba que, el problema de identificación de φ puede ser entendido como un problema inverso, donde el problema directo consiste en, dadoψ, determinar en función deφla traza aΓN de la solucióndébil del problema de contorno:
∆u≡ 0 enΩ,
u|Σ = 0, u|Γ
D = φ,
∂u ∂η
Γ
N
= ψ;
dondeΓD,ΓN yΣforman una partición deΩcon características que se detallan desde el inicio.
Por su parte, la última sección de este capítulo es dedicada a la caracterización, en términos de series de Fourier, de los espacios y ope-radores involucrados en la formulación operacional, cuando Ω es una región cilíndrica.
Se recuerda al lector que al final del texto encontrará un indice de acuerdos usuales de notación.
2 1. FORMULACIÓN OPERACIONAL
1. Preliminares
Los resultados enunciados en la presente sección y el apéndice de este trabajo son resultados conocidos, pueden consultarse en [3, 5, 7, 8, 10, 12, 15].
DadosΩun dominio acotado enRn+1y el multiíndiceα= (α
1, ..., αn), conαk un entero no negativo parak= 1, ..., n. Se define|α|=P
n k=1αk y
Dαϕ(x) = ∂
|α|ϕ
∂xα1
1 · · ·∂x
αn
n
(x), ϕ∈C|α|(Ω).
Definición 1. Derivada de Sobolev La funciónv(x)localmente sumable en Ω se llama derivada en sentido de Sobolev de orden |α| de la funciónu(x)localmente sumable enΩ, y se denotav=Dαu, si satisface la igualdad
Z
Ω
vφdx= (−1)|α|
Z
Ω
uDαφdx, ∀φ∈C0∞(Ω).
Definición 2. Se define el espacio de Sobolev Wm,p(Ω) como el
com-pletamiento de Cm(Ω)en la norma
kukWm,p =
s X
|α|≤m
kDαuk Lp.
Parap= 2se denota Wm,p(Ω) =Hm(Ω).
Las definiciones y demostraciones de propiedades que verifican los espacios de Sobolev pueden consultarse en [3, 5, 10, 12].
El espacioH01(Ω)se define como el completamiento deC0∞(Ω)en la
norma deH1(Ω).
1.1. Subespacios deH1(Ω) con normas equivalentes.
Lema 1.1. SeanΩun dominio acotado enRn+1 yΣun subconjunto de medida no nula en∂Ω; siE=
u∈H1(Ω) : u|
Σ= 0 , entonces <∇·,∇·>:E×E −→ C
(f, g) 7→ Pn
i=1
R
Ω
df dxi
dg dxi
es un producto interior enE, donde la norma inducidak∇·k es equiva-lente a la norma enH1(Ω).
Observación 1. E es un subespacio deH1(Ω)desde que el operador de traza a Σ de funciones de H1(Ω) es lineal y continuo, tiene sentido el enunciado del lema 1.1.
1. PRELIMINARES 3
K1kfk1≤ kfk2≤K2kfk1, ∀f ∈E.
Demostración. Seaf ≡1enΩ. Suponga que enE existe una
ex-tensión continua de f a Ω; significa que para cada (x;z) en Σ, existe una vecindad de(x;z), en su intersección conΩ,f toma valores estric-tamente menores que 1/2, lo cual es claramente una contradicción. Se prueba que no existen enEextensiones continuas def ≡1aΩ; de lo cual se desprende quef ≡1 no pertenece a E, verificándose la desigualdad de Poincaré en dicho subespacio.
Por el lemma A.11, existe una constanteC >0tal que, para todaf
enE se verifica
(1.1) kfk2≤ kfk2H1 ≤(C
2+ 1)h∇f,∇fi.
De (1.1) y la definición deh∇·,∇·i se obtiene queh∇f,∇fi= 0es equivalente a quef ≡0enE.
Las pruebas del resto de las propiedades de un producto interior son inmediatas.
Por último, de (1.1) también se desprende la equivalencia en E de las normask∇·kyk·kH1.
1.2. Vectores y valores propios del operador de Laplace. En adelante se reservan las notacionesΩy Γ para denotar un dominio acotado enRn+1y una superficie de claseC1 en∂Ω, respectivamente.
Sea(∆, H2(Γ)∩H1
0(Γ))el operador de Laplace enΓ, es decir
∆ :H2(Γ)∩H01(Γ) → L 2
(Γ)
v 7→ ∆v=
n
X
k=0 ∂v ∂xk
Siempre quev enH2(Γ)∩H1
0(Γ)no sea identicamente nula, se dice
quev es unafunción propia de(∆, H2(Γ)∩H1
0(Γ)), si existe un escalar λtal que
∆v=λv;
el escalarλse conoce como elvalor propio de(∆, H2(Γ)∩H1
0(Γ))
aso-ciado av.
Observación 2. SiΓes un dominio acotado enRn; entonces, la función propiav del operador (∆, H2(Γ)∩H1
4 1. FORMULACIÓN OPERACIONAL
∆v = λv
v|∂Γ = 0.
Como se observa en el libro de Mijailov [10], las soluciones clási-cas de este problema de contorno también son denominadas funciones propias del mismo.
Una definición de función propia del operador de Laplace en un sentido débil es como sigue.
Definición 3. v en H1
0(Γ) es una función generalizada propia del pro-blema de Dirichlet homogéneo para el operador de Laplace, si existe un escalar λtal que
Z
Γ
∇v∇ϕdx=−λ
Z
Γ
uϕdx, ∀ϕ∈H01(Γ).
En adelante, se hará referencia explícita al sentido en que, en cada caso, se entenderán los valores y funciones propias del operador de Laplace (fuerte, clásico o débil) sólo cuando por contexto pueda existir confusión, de lo contrario se hará referencia a ellos simplemente como valores y fun-ciones propias.
Por la relevancia del operador de Laplace en estas páginas, se presta especial atención al estudio de sus propiedades, incluyendo en lo sucesivo algunas demostraciones relevantes, mismas que pueden ser consultadas en [10, 13, 15] para operadores elípticos en general.
Seanv que pertenece aH01(Γ) y uen H2(Γ)∩H01(Γ) tal que∆u= 0. Por el Teorema A.7 e integración por partes se obtiene
Z
Γ
∇v∇u=
Z
∂Γ v∂u
∂η −
Z
Γ v∆u=
Z
∂Γ v∂u
∂η = 0;
es decir,
h∇v,∇ui= 0, ∀v∈H01(Γ).
Por el Lema 1.1 y el teorema de representación de Riesz se infiere
u≡0. El operador de Laplace es inyectivo, su núcleo es el espacio trivial
{0}.
Por otro lado, integración por partes parauenH2(Γ)∩H1 0(Γ) yv
elemento deH1 0(Γ):
(1.2)
Z
Γ
∇u∇v=− Z
Γ v∆u.
1. PRELIMINARES 5
Z
Γ
k∇uk2≤ kuk k∆uk,
multiplicando por kukC2, C la constante en la desigualdad de Poincaré, siempre queu6= 0, se infiere conjunto acotado en el rango del operador de Laplace también es aco-tado en H111110110(Γ). Por el Teorema A.4, se sigue que el operador (∆−1, Im(∆))es compacto con respecto a la norma en L2(Γ).
En el libro de Mijailov [10] se prueba que el operador de Laplace es autoadjunto bajo las condiciones de suavidad y contorno aquí conside-radas, así que, su inverso también es autoadjunto. En (1.2) se establece que los valores propios del operador−∆ son reales positivos.
Del análisis funcional (ver[8], cap IV) se sabe que el espectro pun-tual de un operador compacto es a lo sumo numerable y tiene al ori-gen por único punto de acumulación en el plano complejo. Además, los valores propios de −∆ coinciden con los inversos multiplicativos de los valores propios de (−∆)−1; es decir, si { 1
También se sabe que el subespacio propioEλk, asociados al vector
propio λ2
k, es de dimensión 1 y existe {vk} base ortonormal de L2(Γ) de funciones propias de−∆, con vk ∈Eλk. Adicionalmente,{vk} es un
subconjunto ortogonal deH1
0(Ω). Integrando por partes y por el Teorema
A.7, para cualesquiera naturalesj ykse garantiza
Z
Más aún, para el inverso aditivo del operador de Laplace, también en [10], se presenta la demostración de existencia de constantes reales positivasC0
0 yC10, así como del naturalk0, tales que, para todok > k0
se satisfacen las desigualdades
C00k2n ≤λ2
k ≤C10k
2
6 1. FORMULACIÓN OPERACIONAL
dondencorresponde a la dimensión deΓ. Pero, definiendo
(1.4)
C0=min{C00, λ1, λ 2 2 21/n. . . ,
λk0
k01/n
}, C1=max{C10, λ1, λ 2 2 21/n. . . ,
λk0
k01/n
};
se sigue,
(1.5) C0k
2
n ≤λ2
k ≤C1k
2
n, ∀k∈N.
1.3. Regularización de problemas inversos mal planteados para ecuaciones del primer tipo. Sea A un operador lineal, com-pacto e inyectivo definido entre los espacios de HilbertX e Y, sobre el campo real o complejo. Los productos interiores y normas enX eY se diferenciarán por contexto y no por notaciones especiales. Se suponen desconocidosxenX ey que pertenece aY, pero tales quexes solución de Ax = y, se denominan x e y como solución exacta y dato exacto, respectivamente. Se supondráδyconocido enY y tal queky−δyk ≤δ. La ecuaciónAx = yδ no es soluble en general y, en caso de serlo, la tansformación A−1 no es continua en Y; incluso si yδ pertenece al rango de A, la solución xδ = A−1yδ no necesariamente se encuentra “suficientemente próxima” axen la norma deX.
Regularizar el problema deresolver la ecuaciónAx=y, siendo co-nocidoyδ, significa encontrar un algoritmo o método para determinarxδ en función deA, yδ y δ, de forma que xδ converja a x, en la norma de
X, cuando el orden del errorδtienda a0.
Definición 4. Una estrategia de regularización es una familia de ope-radores lineales y acotados
Rα:Y →X, α >0
tal que
l´ım
α→0RαAx=x ∀x∈X.
Es decir, los operadoresRαAconvergen puntualmente a la identidad.
Definición 5. Una estrategia de regularización α=α(δ)se dice admi-sible, si para todoxen X se verifica
α(δ)→0, sup{
Rα(δ)yδ−x
:kAx−yδk ≤δ} →0;
cuandoδ tiende a 0.
Teorema 1.2. Sea (λk, xk, yk)un sistema singular deA y
q: (0,∞)×(0,kAk]→R
2. PROBLEMA AUXILIAR DE CONTORNO 7
1. |q(α, λ)| ≤1, ∀(α, λ)∈(0,∞)×(0,kAk];
2. ∀α >0, ∃c(α) : |q(α, λ)| ≤c(α)λ, ∀λ∈(0,kAk]; 3. l´ımα→0q(α, λ) = 1, ∀λ∈(0,kAk].
La familia de operadoresRα:Y →X,λ >0, definida por
Rαy= ∞
X
k=1
q(α, λk)
λk
hy, ykixk, ∀y∈Y,
es una estrategia de regularización, con kRαk ≤ c(α). La elección α=
α(δ) es admisible siα(δ)→0 y δc(α(δ))→0 cuandoδ→0.
Definición 6. La funciónq, definida en el Teorema 1.2, se dice un filtro de regularización paraA.
Teorema 1.3. Siqes un filtro de regularización para el cual existec >0 que
|q(α, λ)−1| ≤c
√
α λ ; entonces,
kRαAx−xk ≤c
√
αkzk, dondex=A∗z.
2. Problema auxiliar de contorno, problema directo SeaΩun dominio acotado enRn+1tal que∂Ω = Γ
N∪Σ∪ΓD, donde
Σ, ΓN y ΓD son superficies de dimensión n, de clase C1 y ajenas por pares,Σes compacta.
Como caso particular que posteriormente reclamará toda la atención se tiene Ω = Γ×(0, a), con Γ un dominio regular y acotado en Rn, Σ =∂Γ×(0, a),ΓN = Γ× {0}yΓD= Γ× {a}.
Considérese el problema de contorno
(1.6)
∆u ≡ 0 enΩ,
u|Σ = 0, u|Γ
D = φ,
∂u ∂η
Γ
N
= ψ.
.
Se definen
E0(Ω) :=
u∈H1(Ω) : u|Σ≡0 E00(Ω) :=
u∈H1(Ω) : u|Σ∪Γ
8 1. FORMULACIÓN OPERACIONAL
Definición 7. use dicesolución débildel problema de contorno (1.6)
si pertenece a E0(Ω), u|Γ
D =φ y se verifica la relación integral
(1.7)
Z
Ω
∇u∇vdx=
Z
ΓN
ψvdS, ∀v∈E00(Ω).
La definición 7 es introducida aquí como una necesidad emanada de la formulación del problema de contorno (1.6), ya que es de utilidad para la formulación operacional del problema de identificación del dato de Dirichlet a partir de condiciones sobredeterminadas en una parte de
∂Ω. Permitiendo queΓN oΓD∩Σsean conjuntos vacíos y una definición adecuada de E, puede extenderse el concepto de solución débil (gene-ralizada) para los problemas de Dirchlet y Neumann, de forma que la definición 7 sea un caso particular de tal generalización; dicho lo cual.
Las demostraciones aquí presentadas, sobre existencia de solución débil de (1.6) paraφyψ en espacios funcionales específicos, se realizan siguiendo ideas contenidas en el libro de Mijailov [10].
Observación 3. ParaudeH1(Ω) que satisface (1.7), se infiere
Z
Ω
∇u∇vdx= 0, ∀v∈H01(Ω),
por lo que, ver[10],ues una función armónica enΩ; es decir, ∆u= 0 enΩ. Integrando por partes se implica la siguiente relación integral que posteriormente será de utilidad:
Z
Ω
∇u∇vdx=
Z
∂Ω v∂u
∂η, ∀v∈H 1(Ω).
Es claro que la solución débil del problema (1.6) no necesariamente existe para cualesquieraφyψde cuadrado integrable,φdebe pertenecer al espacio de LionsH001/2(ΓD)por principio; sin embargo, en lo que resta de la presente sección serán considerados únicamente los pares (φ, ψ)
para los cuales existeusolución débil de (1.6).
Lema 1.4. Dado el par (φ, ψ) tal que existeu, solución débil de (1.6), entonces ues única.
Demostración. Siu1yu2son soluciones débiles de (1.6), entonces u1−u2 también lo es y pertenece aE00(Ω). La definición 7 implica
Z
Ω
∇(u1−u2)∇vdx= 0, ∀v∈E00(Ω).
Por el Lema 1.1 y el teorema de representación de Riesz, u1−u2
2. PROBLEMA AUXILIAR DE CONTORNO 9
Del lema 1.4 se observa que, si existe solución débil de (1.6) para los pares(φ,0) y(0, ψ); entonces, la solución débil de (1.6), para(φ, ψ), coincide conu1+u2, dondeu1yu2son las respectivas soluciones débiles de
Entonces, los problemas inmediatos a resolver son los de existencia de solución débil de (1.8) y (1.9). Se definen los espacios de trazas que naturalmente se presentan:
Cuando sea empleada la expresiónkφk1/2, se entenderá por contexto el conjunto al que debe pertenecerφ.
Lema 1.5. (E1/2(S),k·k
1/n)es un espacio de Banach.
Demostración. E1/2(S) es la imagen de E0(Ω) bajo el operador
de traza a S, claramente es un espacio vectorial. Se probará que k·k1/2
es una norma enE1/2(S).
10 1. FORMULACIÓN OPERACIONAL
αE0,φ+E0,ψ =E0,αφ+ψ.
Por las propiedades de suma y producto por escalar de conjuntos se implica
kαφ+ψk1/2≤αkφk1/2+kψk1/2, ∀φ, ψ∈E1/2(S).
Resta demostrar que E1/2(S) es completo en la norma k·k
1/2. Sea
{φk}k∈N una sucesión de Cauchy en (E1/2(S),k·k1/n); entonces, por la linealidad del operador de traza y la definición de k·k1/2, existen en
E0(Ω), para cualesquierak1< k2ym1< m2,um1,k1 yum2,k2 tales que
um1,k1|S =φk1, um2,k2|S =φk2 y
k∇(um1,k1−um2,k2)kH1 ≤ kφk1−φk2k1/2+ 1 m1+m2.
Entonces ,{uk,k} es una sucesión de Cauchy enH1(Ω) y es tal que
uk,k|S = φk, para todo k. La continuidad del operador de traza como un operador deH1(Ω) enL2(S)termina la demostración.
Lema 1.6. Para toda φ en E1/2(ΓD), existe solución débil única de (1.8),u1, que verifica
(1.10) k∇u1k ≤C1kφk1/2; donde la constante C1 no depende de φ.
Demostración. Si se supone la existencia deu1 solución débil del problema (1.8), entonces para toda u en E1(Ω) tal que u|Γ
D = φ se
definewu=u1−u.
Es clara la pertenencia dewuaE00(Ω)al igual que la validez de las
igualdades (ver Definición 7):
Z
Ω
∇(u+wu)∇vdx=
Z
Ω
∇u1∇vdx= 0, ∀v∈E00(Ω).
Para probar la existencia de solución débil de (1.8) es suficiente con probar, dadoucomo antes, la existencia dewu enE00(Ω) tal que
Z
Ω
∇wu∇vdx=−
Z
Ω
∇u∇vdx, ∀v∈E00(Ω).
Sea Λu : E00(Ω) → R está definida por Λuv = −
R
Ω∇u∇vdx, la
relación integral anterior se reescribe como
Z
Ω
2. PROBLEMA AUXILIAR DE CONTORNO 11
Λu es un funcional lineal que, por las desigualdades triangular, de Hölder y de Caychy-Schwarz, satisface:
(1.11) |Λuvdx| ≤
E00(Ω), probando con ello la existencia de solución débil que, por (1.11), satisface
k∇wuk=kΛuk=inf{K:|Λuv| ≤Kk∇vk, v∈E00(Ω)} ≤ k∇uk. Entonces,
(1.12) k∇u1k ≤ k∇wuk+k∇uk ≤2k∇uk; conC1= 2.
Se ha demostrado que, a partir de cualquier u en H1(Ω) tal que
u|Γ
D = φ, es posible exhibir a u1 como una solución débil de (1.8) en
función deu; sin embargo, el Lema 1.4 establece queu1 no depende de u, por lo que (1.10) se implica de la relación de orden entre los extremos
de (1.12).
Lema 1.7. Para todaψenL2(ΓN)existe solución débil única de (1.9),
u2, que verifica
(1.13) k∇u2k ≤C2kψk; donde la constante C2 no depende de ψ.
Demostración. SeaψenL2(ΓN), Λψ:E00(Ω)→Rse define por
Λψv=
Z
ΓN ψvdS.
El funcionalΛψes lineal, se probara que es acotado. Por la desigual-dad de Hölder, el teorema A.6 y la desigualdesigual-dad de Poincaré, se sigue
Por el teorema de representación de Riesz, existe una función única
12 1. FORMULACIÓN OPERACIONAL
y
k∇u2k =kΛψk ≤Ckψk.
De la definición 7 se sigue que la pareja (φ, ψ) es un elemento de
E1/2(Γ
D)×L2(ΓN), mientras que los lemas 1.4, 1.6 y 1.7 prueban que para cualquier par en E1/2(Γ
D)×L2(ΓN), existe solución débil única
u=u1+u2 del problema (1.6) que depende continuamente de(φ, ψ)en la norma kφk1/2+kψk, situación que se enuncia como un teorema ya demostrado.
Teorema 1.8. Si u es solución débil de (1.6), dado el par (φ, ψ), en-toncesues única y satisface
k∇uk ≤C(kφk1/2+kψk);
dondeC es una constante que no depende de(φ, ψ).
Además del Teorema 1.8, aún es posible obtener más información de utilidad para la regularización del ptoblema de identificación del dato de Dirchlet.
Seanu1 y u2 las respectivos soluciones débiles de (1.8) y (1.9), se definen
Υ1:E1/2(Γ
D) → E0(Ω)
φ 7→ u1 ,
Υ2:L2(ΓN) → E00(Ω)
ψ 7→ u2 .
Los siguientes resultados son considerados como corolarios, se dedu-cen de la definición 7 y los lemas 1.6-1.7.
Corolario 1.9. Υ1 yΥ2 son transformaciones lineales y acotadas.
Corolario 1.10. Las imagenes Υ1(E1/2(ΓD))y Υ1(E1/2(ΓD)) son
or-togonales en(E0(Ω),h∇·,∇·i).
Demostración. La demostración es inmediata si en la definición 7
se sustituyeuporΥ1φyv porΥ2ψ.
Corolario 1.11. Sea kφkD=k∇Υ1φk.(E1/2(ΓD),k·kD)es un espacio
de Banach tal que kφk1/2≤ kφkD.
Observación 4. Por definición, todo conjunto acotado en la norma
k·kD es el conjunto de trazas, a ΓD, de un conjunto acotado en H1(Γ).
Por el Teorema A.8, se sigue que todo subconjunto deE1/2(Γ
a), acotado
3. ECUACIÓN OPERACIONAL EQUIVALENTE 13
3. Ecuación operacional equivalente al problema de Cauchy El primer objetivo de este trabajo es lograr una formulación opera-cional del problema de identificación del dato de Dirichlet que, siendo conocido el par(ϕ, ψ)y bajo el supuesto de existencia enE0(Ω) de una
función armónica en un sentido débil tal que u|Γ
0 = ϕ y ∂u ∂η
Γ
0
= ψ, consiste en determinar la traza de ua Γa; formulación operacional que se basará el corolario 1.9.
3.1. Operadores auxiliares sobre los datos de contorno. SeanΥ1 yΥ2 las transformaciones que asocian aφyψ con la solución
débil de los problemas (1.8) y (1.9), respectivamente. Se define
A:E1/2(Γ
D) → E1/2(ΓN)
φ 7→ Υ1φ|ΓN
A0 :L2(Γ
N) → E1/2(ΓN)
ψ 7→ Υ2ψ|ΓN.
Lema 1.12. A yA0 son lineales y compactas.
Demostración. La continuidad deA yA0 se deduce del corolario 1.9, de la continuidad deΥ1yΥ2, por ser continuo el operador de traza.
Por otro lado, el operador de traza es compacto, se sabe que la com-posición de un operador continuo con una transformación compacta es
también una transformación compacta.
Se recuerda la definición del adjunto de un operador en espacios de Hilbert.
Definición 9. SeanX eY espacios de Hilber yD(A)denso enX. Dado el operador lineal(A, D(A)), se defineD(A∗)como el conjunto de todos losy en Y para los cuales existexy en X tal que
(1.14) hAx, yiY =hx, xyiX, ∀x∈D(A).
El operador adjunto de A,A∗:D(A∗)→X, se define por
A∗y=xy;
dondexy verifica (1.14).
Lema 1.13. A0 es un operador inyectivo y autoadjunto.
Demostración. Por la definición 7 se tiene
k∇Υ2ψk2=
Z
ΓN
ψA0(ψ)dS.
Por lo tanto,A0ψ≡0implicalΥ2ψ≡0, en consecuencia
ψ= ∂Υ2ψ ∂η
Γ
N
14 1. FORMULACIÓN OPERACIONAL
Se concluyeker(A) ={0}, probando queA0 es inyectivo.
Por otro lado, A0 está definido para toda función de cuadrado in-tegrable, bastará con demostrar que es simétrico para establecer que es autoadjunto. Para cualesquieraφ yψ de cuadrado integrable enΓN se cumple (ver Definición 7):
Z
Lema 1.14. A es una transformación inyectiva.
Demostración. Seanφen E1/2(ΓD) yψ enL2(ΓN). De acuerdo con la definición 7,
Z
Ω
∇Υ1φ∇Υ2ψdx= 0.
Además, por la observación 3, se sabe:
Z
Sin embargo, del desarrollo de la demostración del Lema 1.14, se observa que dicha condición es equivalente a
3. ECUACIÓN OPERACIONAL EQUIVALENTE 15
pero, el lado derecho de la última igualdad define un funcional lineal y continuo en L2(ΓD), por tanto, el teorema de representación de Riesz garantiza la existencia deζ de cuadrado integrable enΓD tal que
Z
La ecuación (1.15) prueba el resto del resultado. Teorema 1.16. Dado el par (ϕ, ψ) en L2(Γ
Demostración. La prueba de suficiencia se desprende de las defini-ciones deAyA0. Si existeφcomo en el enunciado del teorema, entonces la solución del problema de contorno (1.6) está dada poru= Υ1φ+Υ2ψ,
en consecuenciaAφ+A0ψ=ϕ.
En cuanto a la necesidad, seanφ,ϕyφfunciones de cuadrado inte-grable tales que tiene sentido la expresión formal
Aφ=ϕ−A0ψ;
Sin embargo, por la definición de solución débil de (1.6), se verifica también
De las dos últimas relaciones integrales se concluye
16 1. FORMULACIÓN OPERACIONAL
Con el teorema 1.16 queda demostrado que resolver el problema de identificación del dato de Dirichlet, es equivalente a resolver la ecuación operacional
Aφ=ρ, ρ=ϕ−A0ψ;
por lo que es posible presentar una definición operacional de lo que signi-fica una solución débil del problema de Cauchy asociado al problema de identificación de del dato de Dirichlet, así como de la propia definición de solución al problema de identificación.
Definición 10 (Datos de Cauchy exactos). (ϕ, ψ) en L2(Γ
0)×L2(Γ0) se dirá un dato de Cauchy exacto, siempre que existaφenE1/2(ΓD)que
resuelve la ecuación operacional
Aφ=ρ, ρ=ϕ−A0ψ.
Se denotará porMal conjunto enL2(Γ)×L2(Γ)de datos de Cauchy exactos.
Definición 11. Para todo dato exacto de Cauchy(ϕ, ψ)yφenE1/2(Γ
a)
que resuelveAφ=ρ, se dirá queu= Υ1φ+ Υ2ψ es la solución débil del problema de Cauchy
(1.17)
∆u ≡ 0 enΩ,
u|Σ = 0, u|Γ
N = ϕ,
∂u ∂η
Γ
N
= ψ.
.
Por su parte, φ se dirá solución del problema de identificación del dato de Dirichlet enΓD para el problema de Cauchy (1.17).
La definición operacional recién presentada de la solución débil del problema de Cauchy (1.17), es una formulación que involucra la solución de un problema inverso mal planteado en el sentido de Hadamard (ver
[7]).
Para aclarar lo anterior, supóngase que A−1 es continuo, al
com-ponerlo conA se tiene que la identidad I es un operador compacto en
E01/2(Γa), de donde se desprende que la bola unitaria es pre compacta; con todo lo anterior y sabiendo que la cerradura de la bola unitaria es compacta si y solamente si el espacio en el que se le entiende es de di-mensión finita, entonces se sigue queE01/2(Γa)es de dimensión finita, lo cual es una contradicción. Por lo tanto, resolver la ecuación
Aφ=ρ
4. SOLUCIONES EN REGIONES CILÍNDRICAS 17
4. Forma de serie para soluciones débiles en regiones cilíndricas
SeaΩ = Γ×(0, a), dondeΓes un dominio acotadoRn con frontera ∂Γde claseC1.
Notación 1. En lo que resta de este texto, salvo que se indique lo con-trario, z denotará un elemento del intervalo [0, a], {vk} será un
sis-tema completo y ortonormal enL2(Γ)de funciones propios del operador (−∆, H2(Γ)∩H1
0(Γ))yλ2k el valor propio correspondiente avk.
Se define ademásΓz:= Γ× {z} .
En lo referente a las superficies involucradas en las condiciones de contorno del problema(1.6), se hacen los siguientes acuerdos de notación para el resto del documento:
Σ =∂Γ×[0, a], ΓD= Γa, ΓN = Γ0.
Debe notarse queL2(Γ)es isométrico a cualquier espacioL2(Γ
z), de modo que son indistintos para efectos del este trabajo.
Como recién ha sido expuesto, dadouun elemento deH1(Ω), u| Γz
puede verse como una función de L2(Γ), por lo que existen {w
k(z)} coeficientes de Fourier de u|Γ
z tales que
relación que, como se mostrará, ofrece en expresión en forma de serie de cualquier función deH1(Ω) cuandoΩes una región cilíndrica.
Lema 1.17. Siues elemento deH1(Ω); entonces,w
kdefinida en(1.18)
pertenece a L2(0, a).
Demostración. Seauelemento de C0∞(Ω). Por hipótesisu2
veri-fica las hipótesis del teorema de Fubini, se sigue
(1.19)
cuadrado integrable desde que Γz es una superficie regular en Ω. En virtud del teorema de Riesz-Fisher y 1.19:
18 1. FORMULACIÓN OPERACIONAL
Se concluye la demostración atendiendo a que C0∞(Ω) es denso en
L2(Ω).
Por otro lado, aplicando aula Definición 1, el teorema de Fubini y por (1.18), se sigue
(1.21)
relación que prueba, por la propia definición de derivada en el sentido de Sobolev, la pertenencia dewk a H1(0, a)y la igualdad
ζj =
dwj
dz , ∀j∈N.
Por otro lado, de (1.3) se infiere
k∇uk2 =
4. SOLUCIONES EN REGIONES CILÍNDRICAS 19
En regiones cilíndricas el lema 1.6 y el teorema 1.8 se verifican si en sus enunciados se sustituyeH1(Ω)porE0(Ω); dichos teoremas implican entonces que la solución débil del problema de contorno (1.6) puede expresarse en forma de serie.
Lema 1.19. Toda función generalizada propia del operador de segunda derivada para funciones definidas en el intervalo (0, a) (operador de Laplace para funciones definidas en un intervalo) es una función pro-pia en el sentido clásico.
Demostración. Siw∈H1(0, a)yλverifican la relación integral
(1.22) pertenece aH1
0(0, a), donde
vt(z) =
v(z), si x∈(0, t) 0, si x∈[t, a) ;
es decir, (1.22) implica
Z t
Es posible derivar (en sentido de Sobolev) en ambos lados de la relación de igualdad en (4), de modo que
(1.23) dw
La relación en (1.23) se cumple particularmente para v =v1+v2, dondev1yv2tienen el mismo soporteI,compacto y conexo propiamente contenido en(0, a), y son tales que enI verifican
dv1 dz =v1,
dv2 dz =−v2
.
Derivando el extremo izquierdo de la igualdad en (1.23) se sigue
d dw
Derivando el extremo derecho,
−λd(wv)
20 1. FORMULACIÓN OPERACIONAL
d2w dz2 −λw
(v1−v2) = (λ2w−λw)(v1−v2).
Se sabe quev1yv2son cualesquiera múltiplos escalares de funciones exponenciales parazenI y nulas en(0, a)\I, por lo que de la relación anterior se desprende que, siempre es posible encontrar un par(v1, v2)
tal quev1(z)−v2(z)6= 0para todazenI,
(1.24) d
2w
dz2 =λ
2w, z∈I.
Para terminar la demostración sólo es nesesario observar que para todozque pertenezca a(0, a), existe un intervalo cerradoIque contiene a z, intervalo que puede coniderarse en todo el desarrollo anterior, de forma que en (1.24) es posible sustituirI por(0, a).
Queda demostrado entonces quewes una función propia en un sen-tido fuerte, lo que a su vez significa que es elemento deH2m(0,1), para todo natural m, probando que w es una función propia en un sentido clásico del operador de segunda derivada (ver Teorema A.3). Notación 2. Para toda funciónf de cuadrado integrable enΓ denota-remos por fk al k-ésimo coeficiente de Fourier de f en L2(Γ) respecto
de la base {vk},fk =RΓf vkdx.
Teorema 1.20. SeanΩ = Γ×[0, a],Σ =∂Γ×[0, a],ΓD= ΓayΓN = Γ0.
La solución débil del problema de contorno (1.6)es de la forma
(1.25) uk(x;z) = ∞
X
k=1
λ
kφkcosh(zλk) +ψksenh((a−z)λk)
λkcosh(aλk)
vk(x).
Demostración. Siues solución débil del problema (1.6), entonces es un elemento de H1(Ω), los lemas 1.17 y 1.18 prueban que existen
w1, w2, . . . deH1(0, a)tales que
(1.26) u(x;z) =
∞
X
k=1
w(z)vk(x).
Aplicando al lado derecho de (1.26) la definición 7 se sigue
Z
Ω
∇
∞
X
k=1 wkvk
!
∇vd(x;z) = 0, ∀v∈C0∞(Ω);
en particular para cualesquieraj enN,w∈C0∞(0, a)yv=wvj, es decir
Z
Ω
∇
∞
X
k=1 wkvk
!
4. SOLUCIONES EN REGIONES CILÍNDRICAS 21
Como la serie en el integrando converge en la norma de H1(Ω) es posible derivar, en el sentido de Sobolev, bajo el signo de la serie. Por serC0∞(0, a)denso enH01(0, a), por el teorema de Fubini y en virtud de
De la relación (1.27) se desprende quewkes un valor propio genera-lizado del operador de segunda derivada enH2(0, a)∩H1(0, a). Como lo establece el Teorema 1.19,wkes una función propia en el sentido clásico, para todok; es decir, d2wk
dz =λ
2
kwk, conλ
2
k >0. Se infiere la existencia de escalaresαk yβk tales que
a. Aplicando el Lema 1.18, con atención al desarrollo de
la demostración, se sigue que elk-ésimo coeficiente de Fourier de ∂u ∂η
Se conocen además las relaciones
(1.31) φk = u|Γa
k=αke aλk−β
ke−aλk.
Resolviendo el sistema de ecuaciones (1.30)-(1.31) se obtiene
αk=
sustituyendo en (1.29) se sigue
22 1. FORMULACIÓN OPERACIONAL
Observación 5. El Teorema 1.20 establece que, en el caso de las regio-nes cilíndricas a las que se refiere, el operadorA es simétrico:
(1.32) Aφ=
4.1. Propiedades de E1/2(Γ) y datos de Cauchy exactos.
Como lo establece el Teorema 1.16, el problema de identificación del dato de Dirichlet para el problema de Cauchy (1.17) es mal planteado, debido a que el operadorAes compacto, por lo queA−1 no es continuo y su dominio se encuentra propiamente contenido en L2(Γ). Es decir, en general, dadas ϕy ψ, no es posible garantizar la existencia de φ en
E1/2(Γ)para la cual tenga sentido la expresión formal
(1.33) Aφ=ϕ−A0ψ.
En el Teorema 1.20 se brinda una forma explícita de la solución del problema de contorno (1.6), donde de forma implícita se encuentran ca-racterísticas fundamentales tanto deMcomo deE1/2(Γ), relevantes para el estudio del problema de identificación que aquí atañe. El contenido de la presente sección está dedicado a la revisión de las propiedades que serán relevantes sobre los espacios de Hilbert que resultarán de utilidad en la etapa de regularización de este trabajo.
Lema 1.21. φ de cuadrado integrable pertenece H1
0(Γ) si la sucesión
{kn1φk},φk =R
Γφvkdx.
Demostración. Para cada k, se recuerda la ya conocida relación
de orden
C0k2n ≤λ2
k ≤C1k 2
n,
por lo que la convergencia de la serie P∞
k=1k
2
nφ2
k es equivalente a la convergencia deP∞
k=1λ 2
kφ2k.
Por otro lado,vk es una función generalizada propia del operador de Laplace(−∆, H2(Γ)∩H1
0(Γ), por lo que cualquier combinación lineal de
las mismas pertenece aH1
0(Γ)y por (1.3) se cumple una sucesión de elementos de H1
0(Γ)converge en la norma k∇·k. Pero,
por hipótesis,{Pm
k=1φkvk}m∈Nconverge a φenL2(Γ), concluyendo así
4. SOLUCIONES EN REGIONES CILÍNDRICAS 23
Lema 1.22. SeanΩ = Γ×[0, a],Σ =∂Γ×[0, a],ΓD= Γa yΓN = Γ0.
Si u es la solución débil del problema de Cauchy, en el sentido de la definición 11, entonces
Demostración. Sabiendo quewk es una función propia del opera-dor de Laplace en el intervalo[0, a]e integrando por partes se sigue
(1.34)
Si u es la solución débil del problema de Cauchy (1.17); entonces, por (1.34), el Lema 1.18 y la propia definición 11, se observa
k∇uk2=
Aplicar el Teorema 1.20 termina la prueba. El Lema 1.22 establece quek∇uk, usolución débil del prolema de Cauchy o cualquier problema de contorno presentado con anterioridad, queda determinada por las parejas de datos de Neumann y Dirichlet en
Γ0 y Γa, siendo esto un avance significativo en la búsqueda de caracte-rizaciones de los conjuntos de dates exactos de Cauchy y de soluciones del problema de identificación relacionado.
Del lema 1.22 se desprenden además los siguientes resultados. Lema 1.23. La función φ es elemento de E1/2(Γ
Empleando el criterio del cociente para la convergencia de series se prueba que la convergencia de la serie en el extremo derecho de la ecuación anterior es equivalente a la convergencia de la serie con término generalλkφ2k.
La relaciónC0k2n ≤λ2
k ≤C1k 2
n en 1.5 concluye la prueba.
Notación 3. El Lema 1.23 exhibe que la pertnencia deφaE1/2(Γ
a)no
24 1. FORMULACIÓN OPERACIONAL
Teorema 1.24. El par (ϕ, ψ) en L2(Γ)×L2(Γ) es un dato exacto de Cauchy (ver definición 11) si y solamente si es de cuadrado sumable la sucesión real con término general:
(ϕk−
ψk
λk
)pλkeaλk.
Demostración. Por el Teorema 1.20, la demostración es equiva-lente a probar la existencia deφenE1/2(Γ)tal que
debido a que el Teorema 1.20 proporciona la forma explícita deuen función de(φ, ψ), toda vez queusea elemento deH1(Ω).
Expresantodoφk en función del par(ϕ, ψ)y sustituyndo en φk en la expresión que caracteriza auk en el Teorema 1.20:
uk(x;z) =ϕkcosh(zλk)− se deduce que la prueba del teorema es entonces equivalente a probar que existeφenE1/2(Γ
a)que verifique
∞
Entonces, por el Lema 1.22,
k∇uk2 = 1
Por ser ϕ y ψ funciones de cuadrado integrable, se deduce que la pertenencia deu0aH1(Ω)es equivalente al hecho de que sea de cuadrado
4. SOLUCIONES EN REGIONES CILÍNDRICAS 25
Los lemas y teoremas antes demostrados brindan caracterizaciones de E1/2(Ω) yM en función los coeficientes de Fourier de los datos de
contorno y los valores propios del operador de Laplace enΓ, información útil al definir normas que serán consideradas en la formulación operacio-nal del problema de identificación del dato de Dirichlet.
Por el Teorema 1.21,Λ,Λe:L2(Γ)→H01(Γ)quedan bien definidos
Claramente Λ y Λe son operadores lineales positivos y simétricos. ParaΛen particular, se presta atención a la existencias de(Λ1/2, L2(Γ)) Observación 6. (H1
0(Γ),k·k2/n) y (, E
1/2(Γ),k·k
1/n) son espacios de
Banach en virtud de los resultados en la presente sección. Esta afirma-ción es válida también para(Me(Γ),k·ke)debido a queΛees un
funcio-nal lineal y acotado deL2(Γ).
Además, son compactas las inmersiones canónicas de(H01(Γ),k·k2/n), (, E1/2(Γ),k·k1/n)y (Me(Γ),k·ke)en L
2(Γ)desde que
26 1. FORMULACIÓN OPERACIONAL
La desigualdad anterior prueba en realidad que cualquier conjunto acotado en alguna de las normas involucrada es un conjunto compacto enL2(Ω) (ver Observación 4).
Corolario 1.25. Mes el conjunto de pares(ϕ, ψ)tales queϕpertenece aH01(Γ)y ξ=ϕ−Λψes elemento deΛ1/2(Me).
Demostración. Por el Teorema 1.24, existef enM tal queϕ= f + Λψ. Por su parte, (1.36) establece la contención Me ⊂ Λ(L2(Γ)), estableciendo con ello la pertenencia de ϕ a Λ(L2(Γ)). Por último, el
lema 1.21 garantiza la pertenencia deϕal espacioH1
0(Γ).
La relevancia de k·k1/n y k·ke quedará establecida más adelante, cuando sea necesario abordar el tema de las condiciones a priori que pueden suponerse en la regularización de problemas inversos mal plan-teados.
Observaciones adicionales son las siguientes. Haciendo el cambio de variableξ=ϕ−Λψ, para(ϕ, ψ)un dato de Cauchy exacto, se obtiene que la soluciónφque completa el dato de Dirichlet para el problema de Cauchy (1.17) está dada por
φ =
Así que, por definición
1 de donde se sigue
kφk2=
4. SOLUCIONES EN REGIONES CILÍNDRICAS 27
Ce,0 4 ξ
2
k+ϕ
2
k ≤
1
4 Λ
−1
e ξ+ Λe(2ϕ−ξ)
2
k≤
1 2ξk+ϕ
2
k ∀k∈N. Por lo que, de las recientes caracterizaciones dekφk ykφk1/nen función deϕyξ, se obtienen las desigualdades siguientes:
(1.37)
r
Ce,0 4 kξk
2
+kϕk2≤ kφk ≤ 1
2kξke+kϕk
y, siempre queγ enMe sea tal queΛ1/2γ=ξ,
(1.38)
r
Ce,0 4 kξk
2
1/n+kϕk
2
1/n≤ kφk1/n≤
1
Capítulo 2
Regularización de la formulación operacional
del problema de Cauchy en regiones
cilíndricas
En adelante se reservaráδ para denotar un escalar en el intervalo
(0,1), (ϕ, ψ)denotará un dato de Cauchy exacto y ( ˜ϕδ,ψ˜δ) una pareja de funciones de cuadrado integrable enΓque verifica
(2.1) kϕ−ϕ˜δk ≤δ,
ψ−
˜ ψδ
≤δ.
El presente capítulo se concentra en la regularización del problema de identificación del dato de Dirichlet, y el problema de Cauchy relacionado, en regiones cilíndricas. Es decir, dado ( ˜ϕδ,ψ˜δ)un dato de Cauchy con error de ordenδ, recuperarφδ que sea «suficientemente próxima» aφen alguna de las normask·k ok·k1/n, dondeφresuelve la ecuación
Aφ=ϕ−A0ψ, (ϕ, ψ)∈ M.
Una forma inmediata de hacerlo es mediante la teoría general de regularización, pues mediante los cambios de variable ρ = ϕ−A0ψ y
˜
ρδ= ˜ϕδ−A0ψ˜δ el problema se puede reescribir en la forma siguiente:
(2.2) Aφ≈ρ˜δ, Aφ=ρ, kρ˜δ−ρk ≤δ(1 +kA0k).
En este punto son pertinentes dos observaciones relevantes sobre el problema de identificación del dato de Dirichlet.
Conforme a lo expuesto con anterioridad y toda vez que Γ sea tal que son conocidos los valores propiosλk y las funciones propias vk; en-tonces, en regiones de la forma Ω = Γ×(0, a), es posible disponer de cómodas caracterizaciones de todos los datos exactos, espacios normados y operadores involucrados en la regularización del problema.
En regiones cilíndricas se dispone particularmente de una caracteri-zación deφen términos del dato de Cauchy exacto y, más aún, es posible caracterizar al espacio de datos de Cauchy exactos. Se cuenta entonces con información adicional que puede ser empleada en el proceso de regu-larización, por ejemplo, en lugar de la terna(φ, ϕ, ψ), puede formularse
30 2. REGULARIZACIÓN DEL PROBLEMA DE CAUCHY
el problema en términos deφ,ϕyξ=φ−Λψ, de modo que la caracte-rización de los pares(ϕ, ξ)está dada por condiciones independientes de pertenencia de ϕy ψ a espacios normados, contenidos en L2(Γ) y con inmersión compacta en dicho espacio.
Como se verá, formular el problema de identificación del dato de Dirichlet en una forma operacional, incluyendo la caracterización de los datos exactos de Cauchy y de Dirichlet, permite esquemas de regulariza-ción con pocas y naturales condicionesa priori sobre el dado exacto de Cauchy. Bajo estos esquemas, las soluciones regularizadas son la imagen inversa deAaplicada a un dato de Cauchy exacto, en cierto modo equi-valente a la proyección del dato con error sobre un subconjunto compacto y convexo deM, dondeA−1es continuo.
Segundo, el operador A transforma trazas de funciones de H1(Ω)
en funciones con un orden de suavidad muy elevado, lo cual hace que la solución de la ecuación Aφ = ρ sea severamente inestable, aún en vecindades de ρ restringidas a la imagen de A. En la Observación 5 se aprecia que, en orden descendente, el k−ésimo valor propio de A
es cosh1(aλ
k), con lo que la convergencia a 0 de los valores propios del
operadorAes de orden exponencial, es decir, parak0,C0yC1 como en (1.5) yk≥k0 se observa
1≤ e
aλk
cosh(aλk)
=
2− e
−aλa
cosh(aλk)
≤2.
Por lo que, de acuerdo con (1.5) y por ser A autoadjunto se sigue que suk−ésimo valor singular es cosh21(aλ
k), se llega así a las relaciones
de desigualdad
(2.3) 1
e2aC1k 2
n−1
≤ 1
cosh2(aλ
k)
≤ 2
e2aC0k 2
n−1
;
es decir, el problema es del tipo exponencialmente mal planteado (ver
[9, 14]), un tipo de problema que por su naturaleza requiere técnicas especiales de regularización.
Para las estrategias admisibles de regularización{Rα}construidas a partir de filtros de regularización, como se muestra en el libro de Kirsch [7], toda vez que es deseable obtener una aproximado del error de regu-larización, los resultados generales requieren como condiciones de sufi-cienciaa priori sobreφla existencia deζ en el dominio deA∗ tal que
A∗ζ=φ, kζk ≤C;
1. TRUNCAMIENTO 31
La informacióna priori es fundamental para la regularización, pero no siempre es posible disponer de la suficiente para lograr hallar un estimado de estabilidad; sin embargo, en lo sucesivo se mostrará que, en regiones cilíndricas, respecto de aplicaciones médicas, es hasta cierto punto natural el tipo de informacióna priori que es suficiente para pro-poner soluciones aproximadas y estrategias de regularización admisibles para el problema de identificación del dato de Dirichlet.
El resto de esta sección se centra en la propuesta de un esquema de regularización, así como en la presentación de perspectivas de desarrollo para un segundo esquema para el problema de identificación del dato de Dirichlet en regiones cilíndricas.
Como antesC0yC1, serán las constantes en los extremos de (1.5),n
se reservará para denotar la dimensión de la regiónΓyadenotará la al-tura del cilindro considerado. En adelante se supondrá que son conocidas cotas paraC0 yC1.
Definición 13. Toda vez que(ϕ, ψ)y( ˜ϕδ,ψ˜δ)sean como antes, entonces
i. Se entenderá por dato de Dirichlet exacto en Γa, o dato de entrada
exacto, a φ solución deAφ=ϕ−A0ψ;
ii. ( ˜ϕδ,ψ˜δ)se dirá un dato de Cauchy con error;
iii. δ delta será el orden del error, o simplemente error, en el dato de
Cauchy,
iv. Se dirá aproximación del dato de Cauchy con estimado de error de
regularización K(δ), a cualquier dato de Cauchy exacto(ϕδ, ψδ)en
función de ( ˜ϕδ,ψ˜δ)y δ que verifique
kφδ−φk ≤K(δ);
donde Aφδ=ϕδ−A0ψδ,K como función deδ está definida en una
vecindad derecha del origen, es positiva, decreciente yK(δ)converge a0 cuando δtiende a 0.
1. Truncamiento Dado0< α <1 y
Rα(ρ) =
1/α
X
k=1
ρkcosh(aλk)vk,
se aprecia queRαes un operador acotado para todoαen(0,1)y
l´ım
α→0RαAρ= l´ımα→0 1/α
X
k=1
ρkvk=ρ;
32 2. REGULARIZACIÓN DEL PROBLEMA DE CAUCHY
Se procederá de la misma forma para casos análogos que puedan presen-tarse confusiones con el uso de subíndices.
Teorema 2.1. Si, dado (ϕ, ψ),φ es solución de tenece aM, por ser una combinación lineal de vectores propios del ope-rador de Laplace.
1. TRUNCAMIENTO 33
La caracterización del conjunto de datos de Cauchy exactos establece queφes elemento deH1
De lo anterior se desprende
lo que prueba la desigualdad en el consecuente del resultado.
Por último, la forma en que se ha definido a Nβ(δ)implica que es monótona y diverge cuandoδtiende a0, lo cual termina la demostración.
El teorema 2.1 ofrece una forma de proponer estrategias admisibles de regularización por truncamiento,α=Nβ−1(δ), de forma queβ puede ser elegida en función del tipo de informacióna priori disponible sobre los ordenes de magnitud deδ y el dato exacto de Cauchy(ϕ, ψ).
Dadosδ0 en(0,1) y la familia paramétrica de funciones
34 2. REGULARIZACIÓN DEL PROBLEMA DE CAUCHY
quedando probada la primera desigualdad de la primera parte y simul-táneamente la segunda parte del lema.
Para demostrar las desigualdades restantes se observa
1. TRUNCAMIENTO 35
Nδ,p+ 1 ≥ min
n
m∈N:mea
√
C1m1/n ≥δp−1o
= minnm∈N: ln(m) +a
p
C1m1/n≥(1−p)(−ln(δ))
o
≥ minnm∈N: (1 +apC1)m1/n≥(1−p)(−ln(δ))
o
;
se implica
Nδ,p1/n≥ (1−p)(−ln(δ))
21/n(1 +a√C1) =
C00
0,1(1−p)(−ln(δ))
√
C0 .
De la definición deKδ,p se desprende
Kδ,p2 ≤C0,1δ2p+δ2+
kξkeδ−aC000,1(1−p)
2
+ kϕkH1
C000,1(1−p)(−ln(δ))
!2
.
Corolario 2.3. Sean ( ˜ϕδ,ψ˜δ)un dato de Cauchy con error, 0< p <1
y 0 < δ0 <1; entonces, respecto de δ, la convergencia de estrategia de regularizaciónR1/Nδ,pa la solución exacta del problema de identificación, respecto deδ, es por a lo sumo del orden de δp .
Demostración. La demostración es una consecuencia inmediata
del lema 2.2, pues la velocidad de convergencia de la estrategia de regu-larización R1/Nδ,p es mayorada por la velocidad con queKδ,p converge
a 0; que a su vez es mayorada por el término en el lado derecho de la segunda desigualdad del lema 2.2, término que converge a cero en con
velocidadδp.
Los resultados aquí presentados sobre la admisibilidad de la estrate-gia de regularizaciónR1/Nβ(δ)ofrecen un mecanismo para la generación
de estrategias de regularización admisibles, en función de la información
a prioride la que se disponga para la regularización de cada en cada uno de los problemas de identificación de datos de contorno aquí atendidos. Por ejemplo, si se conocen cotas superiores para el orden de magnitud del error δ, kξke y kϕk2/n; entonces, una forma de elegir una solución aproximada deφconsiste en proponer
R1/Nδ,p0( ˜ρδ) = ˜φδ,
dondep0minimizaKδ,p. Es decir, elegir entre una familia de estrategias de regularización admisibles, aquella que, dadoδ, minimice el el estimado de errorKδ,p. En estos casos, el valorNδ,p0 se encuentra en función de
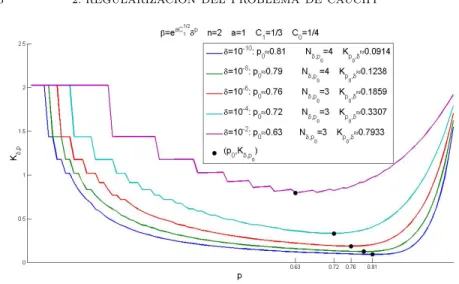
36 2. REGULARIZACIÓN DEL PROBLEMA DE CAUCHY
Figura 1. Ejemplo ficticio de p0, para 5 ordenes dis-tintos de magnitud deδque sólo pretende ser ilustrativo la elección dep0. Las constantesC0yC1fueron elegidas
sólo para hacer evidente el comportamiento cualitativo deKδ,p, en función dep, para el caso en que se verifica
kξke=kϕk2/n= 1.
El lema 2.2 puede ser de utilidad para determinar cuál es el valor
δ0, lo suficientemente pequeño para lograr soluciones aproximadas de φ
que sean de utilidad para fines específicos, toda vez que sea conocida información sobre el orden de magnitud dekξke ykϕk2/n.
2. Perspectivas de regularización Supóngase quekϕk2/n≤Cϕy existeζ enL2(Γ)tal que
ξ=λeλζ, kζk ≤Cζ,
entonces , ξ y ϕ pertenecen a Be(0, Cζ) y BH1(0, Cϕ), las bolas ce-rradas centradas en el origen y de radios Cζ y Cϕ en Me y H1(Γ), respectivamente. La desigualdad (1.38) implica la pertenencia de φ a
B1/n(0,(Cϕ2+Cζ2)1/2), la bola cerrada centrada en el origen y de radio
q
C2
ϕ+Cζ2 en la normak·k1/n.
Ya se ha establecido previamente que los conjuntosBe(0, Cζ),BH1(0, Cϕ) yB1/n(0,(Cϕ2+Cζ2)1/2)son compactos y convexos enL
2(Γ), lo cual
2. PERSPECTIVAS DE REGULARIZACIÓN 37
1. Para todo dato de Cauchy con error ( ˜ϕδ,ψ˜δ) existe un único
(ϕδ, ψδ)dato exacto de Cauchy tal que
ϕδ ∈BH1(0, Cϕ), ξδ = (ϕδ−Λψδ)∈Be(0, Cζ) y
kϕδ−ϕ˜δk = min{kϕ−ϕ˜δk:ϕ∈BH1(0, Cϕ)},
ξδ−
˜ ξδ
= min{kξ−ϕ˜δk :ϕ∈Be(0, Cζ)}.
2. A−1es continuo en B
1/n(0,(Cϕ2+Cζ2)1/2).
Las observaciones anteriores plantean el siguiente esquema de regu-larización por soluciones aproximadas:
φδ=A−1(Λ−21ξδ+ Λe(2ϕδ−ξδ)). Por la desigualdad triangular
kϕδ−ϕk ≤ kϕδ−ϕ˜δk+kϕ˜δ−ϕk,≤2δ
kξδ−ξk ≤
ξδ−
˜ ξδ
+
˜ ξδ−ξ
≤2δ.
Sin embargo, BH1(0, Cϕ) y Be(0, Cζ) son conjuntos compactos y convexos enL2(Γ), se sabe que las respectivas proyecciones ϕδ yξδ de-penden continuamente deϕ˜δ yξ˜δ, lo cual es suficiente para probar
l´ım
Conclusiones
Dado el dato de Cauchy(ϕ, ψ), resolver el problema de de identifica-ción del dato de Dirichlet para el operador de Laplace, puede formularse operacionalmente como un problema inverso, que consiste en resolver la ecuación
Aφ=ρ, ρ=ϕ−A0ψ;
DondeAyA0son operadores lineales y compactos, definidos como la traza aΓN de las soluciones débiles de problemas de contorno auxiliares (1.8) y(1.9), respectivamente.
En regiones cilíndricas (Ω = Γ×(0, a)), φ puede ser expresada en forma de serie Fourier, en función de los coeficientes deϕyψ, respecto de la base{vk}de funciones propias del operador de Laplace definido en
Γ.
Para la obtención de soluciones aproximadasφδ del problema
Aφ≈ρ˜δ, ρ˜δ = ˜ϕδ−A0ϕ˜δ;
es de utilidad la caracterización del conjunto de datos de Cauchy exactos para la construcción de estrategias admisibles de regularización con ve-locidad de convergenciaδp, con acotaciones conocidas para la magnitud del orden del error de aproximaciónkφδ−φk.
Respecto de la aplicación al problema inverso electrocardiográfico del problema de Cauchy para la ecuación de Laplace en regiones cilín-dricas, el siguiente paso natural es lograr determinar una transformación adecuada que haga equivalentes la solución débil de los respectivos pro-blema de identificación del dato de Dirichlet, en los casos en queΩ es una región cilíndrica o una región con una cavidad.
Un problema adicional que atender para la aplicabilidad real de los resultados presentados en este trabajo, es aproximar las funciones y va-lores propios del operador de Laplace para funciones definidas en un dominio acotado enRn.
Apéndice A
Los resultados contenidos en este apéndice pueden ser consultados en [3, 5, 10, 11, 12].
Teorema A.1(Teorema de Convergencia Dominada de Lesbegue). Sea
{fn : Ω→ R} una sucesión de funciones integrables que converge casi donde quiera a una función medible{fn: Ω→R}. Si existe una función integrablegtal que|fn| ≤gpara todo naturaln, entoncesf es integrable
y se verifica
Z
Ω
f dx= l´ım
n→∞
Z
Ω fndx.
Teorema A.2. Sea f una función compleja representable en Ωpor se-ries de potencias yZ(f) ={x∈Ω :f(x) = 0}. Entonces,Z(f) es vació o no tiene puntos de acumulación enΩ.
Teorema A.3. Seak > m/2yΩacotado con frantera regular, entonces Hk(Ω) tiene inmersión compacta enC(Ω).
Teorema A.4(Compacidad de la inmersión entre espacios de Sobolev).
Sea Ω una región acotada de Rn con frontera regular y k1 > k2 ≥ 0; entonces, la inmersiónHk1(Ω)→Hk2(Ω) es compacta.
Teorema A.5 (trazas de las funciones en Hk(Ω), [3] p. 136). Sean Ω una región arbitraria de Rn con frontera regular y Γ una superficie compacta de clase C∞ y de dimensión p < ncontenida en Ω.
i. Si|α|< k−n−p2 , la aplicaciónu→Dαu|Γ, definida de C∞(Ω) en C∞(Γ), se extiende continuamente a una aplicación lineal
Tα:Hk(Ω)→Hk−|α|−
n−p
2 (Γ);
de forma que Tα es una transformación compacta. ii. Si Ω es además acotada, Γ = ∂Ω y j < k− 1
2, la aplicación u 7→ ∂ju
∂ηj, definida de C∞(Ω) → C∞(∂Ω), donde
∂j
∂ηj denota la derivada de orden j en la dirección normal exteriorη a∂Ω, puede extenderse continuamente a una aplicación lineal
Nj:Hk(Ω)−→Hk−j− 1 2(Γ)
42 A
de forma que Nj es una aplicación compacta y sobreyectiva. iii. Existe una aplicación lineal y continua de levantamiento
Pj:Hk−j− 1
2(Γ)−→Hk(Ω)
que es inversa de Nj a la derecha.
Definición 14. SeanΩy Γcomo en el teorema A.5. Si|α|< k−n−p2 , la función Tα∈Hk−|α|−
n−p
2 (Γ)se llama traza en el sentido de Sobolev
de la derivada de ordenαde la función u∈Hk(Ω).
En particular, paraα= 0, la función T0(u) = u|Γ cuando existe, se llama traza aΓ de la funciónu∈Hk(Ω).
Teorema A.6. Sea Ωun dominio acotado en Rn+1 yS una superficie de dimensión n y de clase C1 en Ω, entonces para toda f en H1(Ω) existe la traza def aS y se verifica la relación
kf|SkL2(S)≤ kfkH1(Ω).
Teorema A.7. El espacio de SobolevH1
0(Ω)consta de los elementos en H1(Ω) tales que su traza a la frontera de Ωes nula.
Teorema A.8. Sea Ω un dominio acotado de dimensión n y Γ una superficie regular de dimensiónn−1 contenida en Ω, todo conjunto de trazas en Γ de un conjunto de funciones acotado en la norma deH1Ω es compacto enL2(Γ).
Teorema A.9 (Fórmula de integración por partes). Sea Ωuna región acotada en Rn tal que ∂Ω es de clase C1, mientras que f y g son ele-mentos deH1(Ω), entonces para todoi= 1, ..., nes válida la fórmula de integración por partes
Z
Ω ∂f ∂xi
g=
Z
∂Ω
f gηidS−
Z
Ω f ∂g
∂xi
;
dondeηi=cos(η, xi)es el coseno del ángulo entre la normalη, exterior
a∂Ω, y el eje xi.
De la formula de integración por partes se deduce, parag,f1,...,fn−1
yfn enH1(Ω) tales quef = (fi,· · · , fn):
Z
Ω
gdiv(f)dx=
Z
∂Ω g ∂f
∂η
∂Ω
dS− Z
Ω
f· ∇gdx.
Teorema A.10. Una función armónica en Ωes analítica en Ω.
Definición 15 (Desigualdad de Poincaré, [12] p. 50). Si1≤p≤ ∞ y Ωes un conjunto abierto y no vacío enRn, se dice que se verifica la de-sigualdad de Poincaré enV, subespacio deW1,p, si existe una constante