Desarrollo de un sistema para supervisión de pastoreo
59
0
0
Texto completo
(2) DESARROLLO DE UN SISTEMA PARA SUPERVISIÓN DE PASTOREO. JULIAN CAMILO PIÑEROS LUISA FERNANDA BARRAGÁN R.. PROYECTO DE GRADO PARA OPTAR AL TÍTULO DE INGENIERO ELECTRÓNICO Y TELECOMUNICACIONES. INGENIERA BEATRIZ NATHALIA SERRATO MSC.. UNIVERSIDAD CATÓLICA DE COLOMBIA FACULTAD DE INGENIERÍA PROGRAMA DE ELECTRÓNICA Y TELECOMUNICACIONES BOGOTÁ D. C 2015.
(3)
(4) Nota de aceptación ________________________ ________________________ ________________________ ________________________ ________________________. _______________________________ Firma del presidente de jurado. _______________________________ Firma de jurado. _______________________________ Firma de jurado. Bogotá, 18 de noviembre de 2015.
(5) AGRADECIMIENTOS. Nos gustaría expresar nuestra más profunda gratitud a todas aquellas personas que con su ayuda han colaborado en la realización del presente trabajo, en especial a la ingeniera Nathalia Serrato y al grupo de laboratoristas y maestros de la institución, principalmente al ingeniero José León, por habernos instruido y orientado a lo largo de este proceso. Todo esto nunca hubiera sido posible sin el amparo incondicional de nuestras familias. Han sido y siempre serán nuestros modelos a seguir. A todos ellos muchas gracias..
(6) A nuestros padres por su incondicional apoyo, pero más que nada por su amor incondicional. Todo este trabajo ha sido posible gracias a ellos..
(7) CONTENIDO INTRODUCCIÓN ........................................................................................................................... 11 1.. ANTECEDENTES .................................................................................................................. 12. 2.. JUSTIFICACIÓN .................................................................................................................... 16. 3.. OBJETIVOS ............................................................................................................................ 17. 4.. 3.1. OBJETIVO GENERAL................................................................................................... 17. 3.2. OBJETIVOS ESPECÍFICOS ........................................................................................ 17. MARCO DE REFERENCIA .................................................................................................. 18 4.1. MARCO TEÓRICO ........................................................................................................ 18. 4.2. MARCO CONCEPTUAL ............................................................................................... 20. 4.2.1. Adquisición y procesamiento de imágenes. ....................................................... 20. 4.2.2. Valores de los pixeles ............................................................................................ 23. 4.2.2.1. Imagen en escala de grises .......................................................................... 23. 4.2.2.2. Imagen binaria ................................................................................................ 23. 4.2.2.3. Imagen a color. ............................................................................................... 23. 4.2.3. Histogramas. ........................................................................................................... 23. 4.2.4. Operaciones puntuales. ........................................................................................ 25. 4.2.4.1 Invertir imágenes................................................................................................... 26 4.2.4.2 Umbralización. ....................................................................................................... 26 4.2.5. Operaciones morfológicas básicas. .................................................................... 27. 4.2.5.1 El elemento estructurante. ................................................................................... 27. 5.. 4.2.6. Imágenes de color RGB. ....................................................................................... 28. 4.2.7. Comunicación inalámbrica .................................................................................... 32. DESARROLLO DE PROPUESTA ....................................................................................... 36 5.1 CONTROL DE VUELO ....................................................................................................... 36 5.2 CAPTURA DE IMAGEN ..................................................................................................... 40 5.3 COMUNICACIÓN INALÁMBRICA .................................................................................... 40 5.4 PRE-PROCESAMIENTO ................................................................................................... 43 5.5 SEGMENTACIÓN ............................................................................................................... 47 5.6 EXTRACCIÓN DE CARACTERÍSTICAS ........................................................................ 47 5.7 DETERMINACIÓN DE RANGO DE DETECCIÓN ......................................................... 48.
(8) 5.8 INTERFAZ GRÁFICA ......................................................................................................... 49 6.. ANÁLISIS DE RESULTADOS .............................................................................................. 53. 7.. CONCLUSIONES................................................................................................................... 56. BIBLIOGRAFIA ............................................................................................................................... 58.
(9) LISTA DE FIGURAS Figura 1. Geometría de la cámara estenopeica. ............................................................. 21 Figura 2 Modelo de lentes planos .................................................................................... 22 Figura 3. Imagen en escala de grises de 8 bits y el histograma que representa la distribución de frecuencia de sus 256 valores de intensidad............................................................... 24 Figura 4 Histogramas de una imagen RGB: imagen original (a), histograma de luminancia (b), componentes RGB como imágenes de intensidad (c-e), e histogramas asociados a cada canal (f-h). ............................................................................................................... 25 Figura 5. Efectos de la umbralización sobre el histograma. El valor umbral es ath. La distribución original (a) se divide y se fusiona en dos entradas aisladas a a0 y a1 en el histograma resultante (b). ................................................................................................ 27 Figura 6. Ejemplo de un elemento estructurante binario. ................................................. 27 Figura 7. Representación del espacio de color RGB como un cubo................................ 29 Figura 8. Representación RGB. (a) Ordenamiento de manera plana. (b) Ordenamiento de manera comprimida. ........................................................................................................ 30 Figura 9. Ejemplo de una red WLAN............................................................................... 33 Figura 10. Configuración Single BSS. .............................................................................. 33 Figura 11 Configuración Multi-ESS. ................................................................................. 34 Figura 12 Configuración Single ESS Multiple BSS ........................................................... 34 Figura 13 Configuración vuelo inteligente. ....................................................................... 38 Figura 14 Configuración Waypoint. .................................................................................. 38 Figura 15 Configuración puntos de interés....................................................................... 39 Figura 16 Configuración del proceso que debe realizar el UAV una vez se finalice la misión de vuelo. .......................................................................................................................... 40 Figura 17 Cambiar propiedades de carpeta a compartir. ................................................. 41 Figura 18 Comparación entre imágenes: imagen original (a, c), imagen binarizada tras procesamiento por método de otsu (b, d). ....................................................................... 44 Figura 19 Comparación entre imágenes: imagen original (a, c), imagen binarizada tras procesamiento por método de otsu asignando valores (b, d). .......................................... 45 Figura 20 Comparación entre imágenes: imagen original (a, c), imagen binarizada tras procesamiento por método de Otsu (b, d). ....................................................................... 46 Figura 21 Interfaz gráfica Sistema para supervisión de pastoreo. .................................... 50.
(10) Figura 22 Interfaz gráfica tras cargar las seis imágenes. ................................................. 51 Figura 23 Interfaz gráfica ante porcentaje insuficiente. .................................................... 52 Figura 24 Interfaz gráfica ante terreno listo para rotación ................................................ 52 Figura 25 Comparación a imagen original (a) e imagen tras procesamiento (b)............... 53 Figura 26 Comparación imagen original (a) e imagen tras procesamiento (b). ................ 54 Figura 27 Comparación imagen original (a) e imagen tras procesamiento (b). ................ 54.
(11) INTRODUCCIÓN. El presente proyecto pretende contribuir a la gestión de aplicaciones agrícolas que emplean ganado para controlar el tiempo en el que los pastos están listos para realizar la rotación de potreros. Es necesario contar con un sistema capaz de indicar el periodo de tiempo exacto en el que resulta pertinente guiar al ganado a cierta parte del terreno, evitando así que esta actividad genere impactos ecológicos negativos como resulta ser la erosión del suelo, la reducción de la utilidad, productividad y biodiversidad de la tierra, además de la desertificación, entre otros.. Sirviéndose de un vehículo aéreo no tripulado además de empleando el procesamiento de imágenes, se diseñó e implementó un sistema de control que indicara el tiempo adecuado en el que se debe pastorear un terreno determinado, creando así una aplicación que facilita el desarrollo de dicha tarea, además de mejorar el proceso al automatizarlo..
(12) 1. ANTECEDENTES. El concepto de agricultura de precisión, en su forma actual, apareció en Estados Unidos a principios de los años 80. A partir de ese momento, y gracias a la evolución de las tecnologías, el empleo de sensores de rendimiento y su uso, unido a la aparición del GPS, se ha logrado un mayor escalamiento en la aplicación de estos sistemas en el mundo. Sin embargo, uno de los primeros factores a considerar en este tipo de sistemas corresponde al almacenamiento de datos, cuya disponibilidad es un factor importante a tener en cuenta. Es por esto que en el año 2006 se diseñó un sistema de adquisición de datos basado en sensores remotos, cuya finalidad era proporcionar un programa que facilitara la actualización y edición de datos, además de permitir gestionar el soporte encargado de tomar decisiones, entre otros, para así proveer de una manera más rápida y precisa los datos al usuario1. Años después, se ha podido observar la implementación de nuevas tecnologías sobre este tipo de sistemas, como resulta ser el caso de la investigación expuesta en la 21ª conferencia internacional de geo informática en el año 2013, en donde se presentó una tesis basada en la implementación del internet de las cosas y WebGIS en la agricultura de precisión. Para esto se diseñó cuatro arquitecturas de PAMS, resultando en que los usuarios podían monitorear y gestionar la producción agrícola empleando los previamente mencionados2. La Pontifica Universidad Católica del Perú en el año 2011 presentó una tesis la cual se encargó de la integración de un sistema UAV con control autónomo en un equipo. 1. QINGYUAN, Ma.QIANG, Chen. QINGSHENG, Shang. CHAO, Zhang. "The Data Acquisition for Precision Agriculture Based on Remote Sensing". Geoscience and Remote Sensing Symposium, 2006. IGARSS 2006. IEEE International Conference En, vol., no., pp.888,891, Julio 31 2006-Aug. 4 2. JIUYAN, Ye. BIN, Chen. QINGFENG, Liu. YU, Fang. "A precision agriculture management system based on Internet of Things and WebGIS". Geoinformatics (GEOINFORMATICS), 2013 21st International Conference En , vol., no., pp.1,5, 20-22 Junio 2013..
(13) aéreo para agricultura de precisión, cuya función es la toma georreferenciada de imágenes para su posterior procesamiento, el control autónomo del UAV fue implementado con el sistema ArduPilot mega3. Otro tipo de tecnologías que se han visto aplicadas a este campo en los últimos años corresponde a sistemas UAV. En el año 2013 se empleó esta herramienta para la identificación de parámetros en un cultivo genéticamente modificado ya que estos proporcionan un método rápido y eficiente para analizar las condiciones del campo en zonas extensas. Se debe tener presente que este tipo de cultivos resultan más sensibles a factores como tiempo de irrigación, constitución de nutrientes del suelo, etc, por lo que era de vital importancia encontrar un método para monitorearlos periódicamente4. Meses después, se presentó otro proyecto basado en tecnologías UAV para la medición de índices de vegetación en el monitoreo ambiental. Para esto se presentaba un sensor de imagen multiespectral aerotransportado capaz de capturar simultáneamente tres canales visibles y tres canales infrarrojos cercanos. El sistema de imagen capturaba seis bandas con una resolución espacial mínima de aprox. 10 cm × 10 cm. Al final se pudo concluir que era capaz de resistir el alto nivel de vibración durante el vuelo, además de que el sistema de estabilización de la cámara compensaba rápidos movimientos de balanceo/inclinación del UAV. Igualmente tenía la capacidad de distinguir entre diferentes tipos de vegetación y suelo5. Debido que la agricultura también es posible desarrollarla en las ciudades y con ayuda de tecnología UAV, se implementó una aplicación para mapeo y cuantificar. RABAGAL, D.” INTEGRACION DE UN SISTEMA UAV CON CONTROL AUTÓNOMO EN UN EQUIPO AÉREO PARA AGRICULTURA DE PRECISIÓN”. Lima, Perú. Pontifica Universidad Católica del Perú; Febrero del 2011. 3. 4. GEORGE, E.A. TIWARI, G. YADAV, R.N. PETERS, E. SADANA, S. "UAV systems for parameter identification in agriculture" .Global Humanitarian Technology Conference: South Asia Satellite (GHTC-SAS), 2013 IEEE , vol., no., pp.270,273, 23-24 Agosto 2013 5. ARNOLD, T.; DE BIASIO, M.; FRITZ, A.; LEITNER, R., "UAV-based measurement of vegetation indices for environmental monitoring," Sensing Technology (ICST), 2013 Seventh International Conference on , vol., no., pp.704,707, 3-5 Diciembre 2013.
(14) las áreas de ala agricultura y su producción dentro de las ciudades y en las zonas periurbanas lograr esto es todo un desafío debido a la heterogeneidad de usos del suelo en las zonas urbanas y la pequeña escala del carácter de la agricultura urbana y periurbana6. Entre otras herramientas aplicadas a la agricultura de precisión, las más modernas corresponden a tecnologías de redes de sensores inalámbricos. Este tipo de redes son utilizados ampliamente en la actualidad para construir los sistemas de soporte de decisiones, superando muchos problemas en el mundo real. Por esta razón, se aplicó este concepto en la agricultura de precisión, diseñando una herramienta que resolviera problemas agrícolas relacionados con la optimización de recursos, basándose en el apoyo de toma de decisiones, y vigilancia terrestre. Este enfoque proporcionaba información en tiempo real sobre las tierras y los cultivos, ayudando a los agricultores a tomar las decisiones más acertadas7. Dentro del área de la Agricultura de Precisión al obtener la mayor cantidad de información sobre los campos de cultivo se puede optimizar los procesos de siembra, control de malas hierbas y cosecha. Obtener imágenes con cámaras sobre vehículos aéreos no tripulados está siendo actualmente una solución viable para esta tarea, por lo que el procesamiento y análisis de las imágenes aéreas brindaría mayor información al navegar sobre un cultivo, en Perú la Escuela Politécnica Nacional presento una investigación acerca del desarrollo de un sistema de visión para detectar la dirección de las líneas de cultivos de trigo de imágenes aéreas basándose en el análisis de texturas orientadas; tres estrategias son propuestas para afrontar las diferentes situaciones de las imágenes de cultivo: poca capa vegetal, rodales de mala hierba, variabilidad de la iluminación, escalado de la 6. SCHLESINGER,J;” Unmanned Aerial Vehicles (UAVs) and Urban Agriculture; Potential for Research and Planning”; SCHLESINGER, J. [2015, junio 21]. researchgate. Retrieved from bit.ly/1ZYwZCS 7. KASSIM, M.R.M.; MAT, I.; HARUN, A.N., "Wireless Sensor Network in precision agriculture application," Computer, Information and Telecommunication Systems (CITS), 2014 International Conference on , vol., no., pp.1,5, 7-9 Julio 2014.
(15) imagen, entre otras. Las pruebas han sido realizadas con un repositorio de imágenes propio, logrando resultados muy satisfactorios que indican una respuesta en tiempo real, manteniendo un alto nivel de eficiencia en la detección de la dirección de las líneas de cultivo8. En el 2015, debido al alto interés de implementar UAV en agricultura de precisión en Brasil están implementando aplicaciones de teledetección debido que gracias a las ventajas de los UAV es posible observas las limitaciones y oportunidades de los cultivos además estudiaron en una área critica de dicho país la infestación de HLB además con los resultados obtenidos identificaron y mostraron las acciones recomendadas para mejorar las condiciones del cultivo9. En la actualidad se busca implementar visión artificial en los UAVs, por esta razón en los laboratorios de la Universidad de Linköping, donde la investigación incluye la personalización y el rediseño de métodos de visión artificial dependiendo de las necesidades particulares y restricciones impuestas por las diferentes plataformas de UAV por ejemplo, para la visión de bajo nivel, la estimación de movimiento, navegación y de seguimiento. También incluye una nueva estructura de aprendizaje para la asociación de activaciones percepción - acción, y un sistema de tiempo de ejecución para la aplicación y ejecución de algoritmos de visión, es importante resaltar que esta implementación fue realizada para un helicóptero10.. SOTOMAYOR,J;GOMEZ,A;CELA,A;” Sistema de visión artificial para el análisis de imágenes de cultivo basado en texturas orientadas”;REVISTA EPN,VOL 33,No.1;ENERO DE 2014 8. JORGE,L; BRANDÃO,Z; INAMASU,R;” Insights and recommendations of use of UAV Platforms in precision agriculture in Brazil ”; Embrapa Instrumentação; 1452, São Carlos, SP, 13560-970; 15 Noviembre 2015 9. NORDBERG,K;DOHERTY,P;FARNEBӒCK,G;FORSSEN,P;GRANLUND,G;MOE,A;”Vision for a UAV Helicopter”, Department of Computer Science, Link¨oping University, Sweden 10.
(16) 2. JUSTIFICACIÓN. La rotación de potreros es un sistema de pastoreo basado en alternar el uso con el descanso del potrero, orientando diferentes estrategias para obtener la máxima producción animal por hectárea mediante un sistema productivo sostenible. Para realizarlo, el ganadero se asegura que los animales permanezcan un periodo mínimo de un día y máximo de seis en cada terreno, ya que si se excede este tiempo de consumo las raíces y persistencia del pasto se pueden debilitar. Debido a que el tiempo de rotación de ganado se determina sirviéndose de cifras aproximadas, con la realización de este proyecto se desea desarrollar un sistema de procesamiento que sea capaz de indicar el momento adecuado para hacer la rotación entre ambos terrenos asegurando la calidad del suelo, y al mismo tiempo reduciendo el impacto ecológico que actividades previamente realizadas con mala gestión pudieron ocasionar en la biodiversidad de la zona. Es necesario garantizar la calidad del suelo, ya que por su composición química es uno de los sujetos responsables que hacen posible la fotosíntesis, base de la vida vegetal y de todos los seres vivos en general. La erosión, la compactación, el aumento de la salinidad y de la acidez del suelo son los mayores problemas relacionados con el uso inadecuado del suelo, pudiendo tener relación directa con la escasez de alimentos en un futuro no muy distante. Sin prácticas adecuadas que lo protejan, el resultado puede ser un profundo desequilibrio del sistema productivo..
(17) 3. OBJETIVOS. 3.1. OBJETIVO GENERAL. Diseñar e implementar un sistema que sirva de alternativa para la supervisión del pastoreo. 3.2. OBJETIVOS ESPECÍFICOS. . Definir el estado del arte del UAV aplicado a rotaciones de pasto.. . Determinar los elementos de captación que permitan obtener las imágenes de la zona en estudio.. . Implementar un sistema de identificación de las zonas para pastoreo..
(18) 4. MARCO DE REFERENCIA 4.1 MARCO TEÓRICO El concepto sobre el que se basa la agricultura de precisión es aplicar la cantidad correcta de insumos, en el momento adecuado y en el lugar exacto. Es el uso de la tecnología de la información para adecuar el manejo de suelos y cultivos a la variabilidad presente dentro de un lote. La agricultura de precisión (AP) involucra el uso de sistemas de posicionamiento global (GPS) y de otros medios electrónicos para obtener datos del cultivo11. Dado que la mira central de este análisis estará puesta en la imagen digital y su procesamiento, más concretamente enfocado en la detección de patrones en el campo de la agricultura de precisión, será necesario plantear algunos parámetros que sirvan de ejes conceptuales sobre los que apoyar el desarrollo de la herramienta que se desea proporcionar como bien final. Para empezar, se entenderá el concepto de imagen digital, como una matriz bidimensional de píxeles en la que cada píxel puede adquirir valores de color codificados con tres parámetros, que representan los componentes rojo, verde y azul de todo color. Estos valores de R, G y B se suelen expresar en un rango de 8 bits, o sea, de valores entre 0 y 255. Como fuente de análisis de los procesos de visión artificial, frecuentemente se utilizan imágenes de baja resolución (entre 160x120 y 640x480 píxeles), ya que en la mayoría de los casos no se necesita de excesivo detalle en las imágenes para efectuar un análisis orientado a la visión por computador. Sin embargo, para este caso en concreto en donde sí se necesita contar con la visualización de ciertos detalles específicos del terreno, y debido a la resolución que ofrece la cámara. 11. GARCIA E, FLEGO F. Agricultura de precisión [en línea ]. Ciudad Autónoma de Buenos Aires, Argentina. Disponible en internet < bit.ly/1N54z0B >.
(19) utilizada, las imágenes tienen una dimensión de 4000x3000, que posteriormente se reajustará a 1308x754 pixeles12. Debido a que un cambio lo bastante fuerte en el ambiente lumínico puede hacer que todo el sistema de visión artificial funcione de un modo muy diferente, es necesario delimitar el área en el que se desea hacer el reconocimiento, y siempre que sea posible trabajar en un entorno en los que el ambiente lumínico sea cuanto más estable mejor. Las técnicas de visión artificial siguen un proceso que empieza con la adquisición de la imagen, su procesamiento tras el cual se obtendrán los datos, para en última instancia extraer la información que se busca. Para el proceso de adquisición de imagen se debe tener en cuenta que, como se mencionó anteriormente, una imagen digital es producida por sensores presentes en cámaras y otros dispositivos digitales que generan una imagen bidimensional (2D), es decir, un conjunto de N x M pixeles o colores o intensidades de un cierto valor que representan el espacio que se quiere analizar. Existen diferentes medios para la obtención de una imagen digital, los más comunes son: los scanners de cama plana y las cámaras digitales. Ambos se basan en un dispositivo llamado CCD (Coupled Charge Device), éste recibe la luz de la imagen, ya sea por reflexión o por transmisión e integra en un tiempo definido la cantidad de luz que llega a él13. Antes de extraer información directamente de la imagen, se acostumbra a hacer un procesamiento previo de la misma para conseguir otra que nos permita hacer la extracción de datos de manera más sencilla y eficiente.. 12. UNIVERSIDAD AUTONOMA DE PUEBLA. Procesamiento digital de imágenes [en linea]. Mexico: ORTIZ, M [25 de Septiembre] Disponible en internet: < bit.ly/1RA1Fcr.> 13. Ibid. p. 71-112..
(20) Una vez que se tenga la imagen preparada, se aplica una serie de algoritmos para extraer los datos de la misma14. 4.2 MARCO CONCEPTUAL 4.2.1 Adquisición y procesamiento de imágenes. El procesamiento de imágenes se basa en obtener una imagen y aplicarle técnicas de procesamiento de señal para obtener resultados esperados. El objetivo del procesamiento de imágenes es mejorar la calidad de las imágenes para su posterior utilización o interpretación. Muchas veces el término "procesamiento de imágenes" se utiliza como sinónimo de "edición de imágenes", sin comprender que la edición de imagen digital, es la manipulación de imágenes utilizando una aplicación de software existente, como Adobe Photoshop o Corel Paint mientras que el procesamiento de imagen, es la concepción, diseño, desarrollo, y mejora de programas de imágenes digitales. El proceso por el cual una escena se convierte en una imagen digital es variado y complicado, y depende esencialmente de las variaciones en la cámara óptica clásica, de la que se hablará a continuación. La cámara estenopeica consta de una caja cerrada con una pequeña abertura en el lado frontal a través del cual entra luz, formando una imagen en la pared opuesta. La luz forma una imagen invertida más pequeña de la escena15. Las propiedades geométricas de la cámara estenopeica son muy simples. El eje óptico se extiende a través del agujero perpendicular al plano de la imagen. Se asume un objeto visible (el cactus en la Figura 1) situado a una distancia horizontal Z desde el agujero de alfiler Y y vertical a la distancia desde el eje óptico. La altura de la proyección está determinada por dos parámetros: la profundidad f de la caja GARCÍA, Eloi Maduell i; “Visión artificial”; Primera edición. Cataluña España. Universitat Oberta de Cataluña.2012. 30 p 14. 15. BURGER,W. BURGE, M. Programing with images. EN: Principles of digital image processingfundamental techniques. Primera edición. Springer.p.1-24.
(21) de la cámara y la distancia Z del objeto desde el origen del sistema de coordenadas. Emparejando triángulos semejantes se obtienen las siguientes relaciones: 𝑦 = −𝑓. 𝑌 𝑍. y. 𝑥 = −𝑓. 𝑋 𝑍. (1). Figura 1. Geometría de la cámara estenopeica.. Fuente BURGER,W. BURGE, M. Programing with images. EN: Principles of digital image processing- fundamental techniques. Primera edición. Springer.p.5. Disponible en bit.ly/1ONqvD2. Obviamente, la escala de la imagen resultante cambia en proporción a la distancia f. Un tamaño de f pequeño genera una imagen pequeña y con un ángulo de vista amplio. Análogamente, en caso contrario se obtiene una imagen grande con un ángulo de vista pequeño. La geometría sencilla de la cámara estenopeica resulta útil para comprender los principios básicos, sin embargo, este dispositivo nunca se utilizó realmente en la práctica, entre muchos problemas que presentaba, el principal es que requiere una abertura muy pequeña para producir una imagen nítida. En la realidad, se utilizan lentes o sistemas de lentes ópticos de vidrio cuyas propiedades ópticas son muy superiores en muchos aspectos. Entre estos sistemas cabe resaltar el modelo de lentes ópticos “planos”, en donde se supone que el lente empleado es simétrico e infinitamente delgado, de tal manera que todos los rayos de luz que pasan a través de él se refractan en un plano virtual en el centro del mismo. La geometría de la imagen resultante es prácticamente la misma que la de la cámara estenopeica..
(22) Figura 2 Modelo de lentes planos. Lo que se proyecta en el plano de la imagen de la cámara es esencialmente una distribución continua de energía de luz bidimensional en función del tiempo. La transformación de esta distribución hacia lo que se conoce como una "fotografía digital" depende de tres pasos principales: 1. Muestrear espacialmente la distribución de la luz continúa. 2. La función "discreta" resultante debe ser muestreada en el dominio del tiempo para crear una sola imagen. 3. Los valores resultantes deben ser cuantificados a un conjunto finito de valores numéricos de manera que sean representables en el computador. El resultado de estas tres etapas resulta en la descripción de una imagen en la forma de una matriz ordenada y bidimensional de números enteros. El tamaño de una imagen se determina directamente a partir de su ancho M (número de columnas) y la altura N (número de filas) de la matriz de imagen I. La resolución de una imagen especifica las dimensiones espaciales de la imagen en el mundo real y se da como el número de elementos de imagen por medición..
(23) 4.2.2 Valores de los pixeles. Un píxel, acrónimo del inglés picture element, ‘elemento de imagen’, es la menor unidad homogénea en color que forma parte de una imagen digital16. La información dentro de un elemento de imagen depende del tipo de datos utilizado para representarla. Los valores de píxel son prácticamente siempre palabras binarias de longitud k de modo que un píxel puede representar cualquier valor 2k diferente. El valor k recibe el nombre de profundidad de bits (o simplemente "profundidad") de la imagen.17 La distribución exacta a nivel de bit de un píxel individual depende de la clase de imagen, entre las que cabe resaltar: 4.2.2.1. Imagen en escala de grises. Las imágenes en escala de grises constan. de un solo canal que representa la intensidad, el brillo, o la densidad de la imagen. Una imagen en escala de grises típica utiliza k = 8 bits (1 byte) por valores de píxeles y valores de intensidad dentro del rango [0... 255], donde el valor 0 representa la luminosidad mínima (negro) y 255 el máximo brillo (blanco). 4.2.2.2. Imagen binaria. Las imágenes binarias son un tipo especial de imagen,. en donde la intensidad de los píxeles sólo puede tomar uno de dos valores, blanco o negro. Estos valores se codifican típicamente usando un solo bit (0/1) por píxel. 4.2.2.3. Imagen a color. La mayoría de las imágenes a color se basan en los. colores primarios rojo, verde y azul (RGB), por lo que normalmente requieren de 8 bits para cada componente de color. En estas imágenes, cada píxel requiere 3×8 = 24 bits para codificar los tres componentes, y el rango individual de cada componente de color se encuentra entre [0... 255].. 4.2.3 Histogramas. De manera general, los histogramas son distribuciones de frecuencia. Cuando son aplicados a una imagen, describen la frecuencia de los. 16. REAL ACADEMIA ESPAÑOLA. Diccionario de la lengua española. (2 vols.) Madrid, España (2005) p.2400. 17. BURGER,W. BURGE, M., op cit., p. 10-12..
(24) valores de intensidad que se producen en la misma. Un histograma h para una imagen en escala de grises I con valores de intensidad en el rango I (u,v) ∈ [0, K-1] contendría exactamente K entradas, donde para una imagen en escala de grises típica de 8, K = 28 = 256. Cada entrada de histograma individual se define como: h(i) = número de píxeles de I con el valor de intensidad i, para todo 0 ≤ i <K. O de una manera más formal, ℎ(𝑖) = 𝑐𝑎𝑟𝑑{(𝑢, 𝑣)|𝐼(𝑢, 𝑣) = 𝑖}. (2). Figura 3. Imagen Representación de histograma (a) Imagen en escala de grises. (b) histograma de la imagen.. Fuente autores.. Los histogramas hacen evidentes los clásicos problemas de exposición, además de permitir la lectura de contraste directamente. El contraste se entiende como el rango de valores de intensidad utilizados con eficacia dentro de una imagen dada, que es la diferencia entre los valores máximos y mínimos de píxeles de la imagen. Una imagen completamente contrastada hace uso efectivo de la totalidad de la gama de valores de intensidad disponible desde a = 0...K-1 (negro a blanco)18. Los histogramas en imágenes a color por lo general son graficas que describen la intensidad de la imagen (luminancia) o de los canales de color individuales. Los histogramas de componentes proporcionan información adicional acerca de la. 18. Ibid., p. 37-52..
(25) distribución de intensidad dentro de los canales de color individuales.. 19Al. calcular. histogramas de componentes, cada canal de color se considera una imagen de intensidad separada y cada histograma se calcula de manera independiente de los otros canales. La Figura 4 muestra el histograma de luminosidad de la imagen y los tres histogramas compuestos de cada canal RGB de la imagen a color. Figura 4 Histogramas de una imagen RGB: imagen original (a), histograma de luminancia (b), componentes RGB como imágenes de intensidad (c-e), e histogramas asociados a cada canal (f-h).. Fuente BURGER,W. BURGE, M. Programing with images. EN: Histograms. Primera edición. Springer. p. 51. Disponible en bit.ly/1ONqvD2. 4.2.4 Operaciones. puntuales.. Las. operaciones. puntuales. realizan. una. modificación de los valores de píxel sin cambiar el tamaño, la geometría, o la. 19. Ibid., p. 37..
(26) estructura local de la imagen20. Ejemplos típicos de operaciones de puntos homogéneos incluyen, entre otros:. -. Modificación de brillo o contraste de la imagen.. -. Aplicación de transformaciones de intensidad arbitraria.. -. Cuantificación de imágenes.. -. Umbralización global.. -. Corrección gamma.. -. Transformaciones de color.. Algunas de estas técnicas se verán en más detalle a continuación. 4.2.4.1 Invertir imágenes. La inversión en la intensidad de una imagen es una operación simple en la que se invierte el orden de los valores de píxel (multiplicando por -1) y añade un valor constante para mapear el resultado de nuevo a la gama admisible21. Así, para un valor de píxel a=I(u,v) en el intervalo [0, amax], la operación de punto correspondiente es: 𝑓𝑖𝑛𝑣𝑒𝑟𝑡(𝑎) = −𝑎 + 𝑎𝑚𝑎𝑥 = 𝑎𝑚𝑎𝑥 − 𝑎. (3). 4.2.4.2 Umbralización. Umbralizar una imagen es un tipo especial de cuantificación que separa los valores de píxel en dos clases, dependiendo de un valor umbral ath dado, que suele ser constante. La función de umbral f(a) asigna a todos los píxeles uno de dos valores de intensidad fija: a0 o a1. 𝑓(𝑎) = {. 𝑎0 𝑝𝑎𝑟𝑎 𝑎 < 𝑎𝑡ℎ } 𝑎1 𝑝𝑎𝑟𝑎 𝑎 ≥ 𝑎𝑡ℎ. (4). La umbralización se utiliza comúnmente para la binarización de una imagen, definiendo valores de a0 = 0 y a1 = 1.. 20. Ibid., p. 55-94.. 21. Ibid., p. 86-94..
(27) Figura 5. Efectos de la umbralización sobre el histograma. El valor umbral es a th. La distribución original (a) se divide y se fusiona en dos entradas aisladas a a0 y a1 en el histograma resultante (b).. Fuente BURGER,W. BURGE, M. Programing with images. EN: Point Operations, threshold operation. Primera edición. Springer. p. 58. Disponible en bit.ly/1ONqvD2. 4.2.5. Operaciones morfológicas básicas. Las operaciones morfológicas más. utilizadas son la dilatación y la erosión, sin embargo, estas abarcan procesos mucho más complejos que retirar o colocar capas de pixeles individuales. 4.2.5.1 El elemento estructurante. Las propiedades de un filtro morfológico están especificadas por elementos en una matriz llamada "elemento estructurante". En la morfología binaria22, el elemento estructurante (al igual que la propia imagen) contiene sólo valores de 0 y 1 (𝐻(𝑖, 𝑗) ∈ {0, 1}). El punto de enfoque marca el origen del sistema de coordenadas de H (Figura 6). Aunque cabe resalta que este punto no se sitúa necesariamente en el centro del elemento de estructuración, ni que su valor debe ser 1. Figura 6. Ejemplo de un elemento estructurante binario.. Fuente BURGER,W. BURGE, M. Programing with images. EN: Morphological Operations,the Structuring Element. Primera edición. Springer. p. 161. Disponible en bit.ly/1ONqvD2. 22. Ibid., p. 157-184..
(28) Para la especificación formal de operaciones morfológicas, es útil describir las imágenes binarias como conjuntos de puntos con coordenadas bidimensionales. Para una imagen binaria I(u,v) ∈ {0, 1} el punto de referencia establecido QI consiste en las coordenadas pares p=(u, v) de todos los píxeles de primer plano. 𝑄𝐼 = {𝑝 | 𝐼(𝑝) = 1}. (5). Las operaciones fundamentales en imágenes binarias también se pueden expresar como operaciones de conjuntos simples. Por ejemplo, la inversión de una imagen binaria I → Ῑ (es decir, intercambiar el primer plano y el fondo) es equivalente a construir un conjunto complementario: ̅̅̅ = {𝑝 ∈ ℤ2 |𝑝 ∉ 𝑄𝐼} 𝑄𝐼 = 𝑄𝐼. (6). 4.2.6 Imágenes de color RGB. RGB es un sistema de color aditivo, lo que significa que todos los colores comienzan con negro y se crean mediante la adición de colores primarios. La intensidad distintiva de cada haz de color primario controla la sombra y brillo del color resultante. Los colores gris y blanco se crean mediante la mezcla de los tres haces de colores primarios en la misma intensidad. El espacio de color RGB se puede visualizar como un cubo en el que los tres colores primarios forman el eje de coordenadas. Los valores RGB son positivos y se encuentran en un rango que abarca desde [0, Cmax]; para la mayoría de imágenes digitales, Cmax = 255. Cada color posible Ci corresponde a un punto dentro del cubo de color RGB de la forma Ci = (Ri,Gi,Bi), donde 0 ≤ Ri,Gi,Bi ≤ Cmax..
(29) Figura 7. Representación del espacio de color RGB como un cubo.. Fuente BURGER,W. BURGE, M. Programing with images. EN: Color Images seccion, RGB Color images. Primera edición. Springer. p. 168. Disponible en bit.ly/1ONqvD2. Las imágenes en color se representan de la misma manera que las imágenes en escala de grises, mediante el uso de matrices de píxeles en las que se utilizan diferentes modelos para ordenar los componentes de color individuales. Se pueden organizar de dos maneras: imágenes de color vivo, las cuales utilizan los colores seleccionados uniformemente en todo el espacio de color, y las llamadas imágenes paletizadas o indexadas, en las que sólo se utilizan un conjunto selecto de colores distintos. Un píxel de una imagen de color vivo puede representar cualquier color en su espacio de color, siempre y cuando se encuentre en la gama de sus componentes de color individuales. Los componentes se pueden ordenar de dos maneras distintas: ordenación plana y ordenación comprimida. En la ordenación plana los componentes de color se establecen en matrices independientes de dimensiones idénticas. En este caso, la imagen de color I = (IR, IG, IB) puede ser considerado como un vector de imágenes de intensidad relacionados IR, IG, e IB, y los valores de los componentes RGB de la imagen a color.
(30) I en la posición (u, v) se obtienen mediante el acceso a las tres imágenes de intensidad de la siguiente manera: 𝐼𝑅 (𝑢, 𝑣) 𝑅 𝑢, 𝑣 (𝐺 𝑢, 𝑣 ) ← ( 𝐼𝐺(𝑢, 𝑣) ) 𝐵 𝑢, 𝑣 𝐼𝐵(𝑢, 𝑣). (7). En la ordenación comprimida, los valores de los componentes que representan el color de un píxel en particular se embalan juntos en un solo elemento de la matriz de imagen de manera que I(u, v) = (Ru,v,Gu,v,Bu,v)23. El valor RGB de una imagen I en la posición (u, v) se obtiene mediante el acceso a los componentes individuales del pixel de color24: 𝑅𝑒𝑑(𝐼 (𝑢, 𝑣)) 𝑅 𝑢, 𝑣 (𝐺 𝑢, 𝑣 ) ← (𝐺𝑟𝑒𝑒𝑛(𝐼(𝑢, 𝑣))) 𝐵 𝑢, 𝑣 𝐵𝑙𝑢𝑒(𝐼(𝑢, 𝑣)). (8). Figura 8. Representación RGB. (a) Ordenamiento de manera plana. (b) Ordenamiento de manera comprimida.. Fuente BURGER,W. BURGE, M. Programing with images. EN: Color Images seccion, RGB Color images. Primera edición. Springer. p. 189. Disponible en bit.ly/1ONqvD2. Las imágenes indexadas por su parte, permiten sólo un número limitado de colores distintos y, por tanto, se utilizan sobre todo para las ilustraciones y los gráficos que 23. Ibid., p. 185-228. 24. Ibid., p. 168.
(31) contienen grandes regiones del mismo color. A menudo este tipo de imágenes se almacenan en archivos GIF o PNG indexados para su uso en la Web. En estas imágenes indexadas, la matriz de pixeles no contiene datos de color o de brillo, sino que se compone de números enteros k que se utilizan para indexar en una tabla de colores o "paleta" P(k) = (rk, gk, bk), para k = 0. . .N−1. N es el tamaño de la tabla de colores y por lo tanto también el número máximo de colores distintos (típicamente N = 2 a 256). Desde que la tabla de colores puede contener cualquier valor de color RGB (rk, gk, bk), estos valores deben ser guardados como parte de la imagen. Los valores de los componentes RGB de una imagen indexada Iidx en la posición (u, v) se obtienen: 𝑃𝑅(𝑘) 𝑟𝑘 𝑅 (𝐺 ) ← (𝑃𝐺(𝑘)) = (𝑔𝑘), con k= Iidx(u,v) 𝑃𝐵(𝑘) 𝐵 𝑏𝑘. (9). Durante la transformación de una imagen de color vico a una imagen indexada (por ejemplo, de una imagen JPEG a una imagen GIF), surge el problema de la reducción de color óptimo, o cuantificación del color. La cuantificación del color es el proceso de determinación de una tabla de colores óptima, que permita luego mapear a los colores originales. La conversión de una imagen de color RGB a una imagen en escala de grises se lleva a cabo mediante el cálculo del valor de gris o de luminancia equivalente Y, para cada píxel RGB.25 En su forma más simple, Y podría ser calculado como la media de los tres canales.. 𝑌 = 𝐴𝑣𝑔 (𝑅, 𝐺, 𝐵) =. 25. Ibid., p. 202.. 𝑅+𝐺+𝐵 3. (10).
(32) Desde que el ojo humano percibe tanto rojo y verde como sustancialmente más brillantes que el azul, la imagen resultante parecerá ser demasiado oscura en las áreas rojas y verdes y demasiado brillante en las zonas azules. 4.2.7 Comunicación inalámbrica. La comunicación inalámbrica o sin cables es aquella en la que la comunicación (emisor/receptor) no se encuentra unida por un medio de propagación físico, sino que se utiliza la modulación de ondas electromagnéticas a través del espacio26. La comunicación inalámbrica, que se realiza a través de ondas de radiofrecuencia, facilita la operación en lugares donde la computadora no se encuentra en una ubicación fija. Entre estos métodos de comunicación se encuentra la Red de área local inalámbrica o WLAN. Una red de área local inalámbrica, es un sistema de comunicación flexible, muy utilizada como alternativa a las redes de área local cableadas o como extensión de éstas. Como se mencionó anteriormente, usan tecnologías de radiofrecuencia que permite mayor movilidad a los usuarios al minimizar las conexiones cableadas. 27 Al hablar de ondas de radio se hace referencia a portadoras de radio, sobre las que va la información, ya que realizan la función de llevar la energía a un receptor remoto. Los datos a transmitir se superponen a la portadora de radio y de este modo pueden ser extraídos exactamente en el receptor final. Este proceso recibe el nombre de modulación de la portadora por la información que está siendo transmitida28.. 26. REAL ACADEMIA DE INGENIERIA. Comunicación inalámbrica [en linea]. España. [8 de agosto de 2015]. Real Academia de Ingeniería. Disponible en internet: < http://goo.gl/mB1xCb > 27. WIKIPEDIA. Red de área local inalámbrica [en línea]. Wikipedia: [28 de octubre de 2015]. Disponible en internet :< https://goo.gl/IqT9Sg > 28. Loc. Cit..
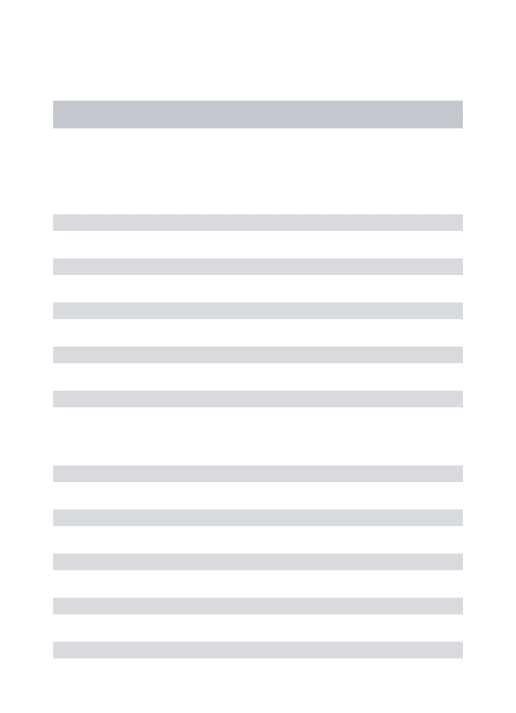
(33) Figura 9. Ejemplo de una red WLAN.. [Citado el 28 de Octubre de 2015] disponible en <http://bit.ly/1MfBYKo>. . En este tipo de redes se presentan 3 topografías principales:. Single BSS: La cobertura de un punto de acceso se denomina Basic Service Set (BSS). Cada BSS se identifica por el BSSID. La red WLAN más básica se puede establecer con un solo BSS, en donde todos los clientes se asocian al mismo. Si los clientes tienen las mismas autoresizaciones, pueden comunicarse entre sí. Esta configuración se muestra en la Figura 10. Figura 10. Configuración Single BSS.. [Citado el 28 de Octubre de 2015] disponible en bit.ly/1Rk1l0Z.
(34) Los clientes son capaces de comunicarse entre sí y también son capaces de llegar a un host en Internet. La comunicación entre los clientes dentro de la misma BSS se lleva a cabo por el Fat AP. Multi-ESS: Todos los clientes bajo la misma administración lógica forman un conjunto de servicio extendido (ESS). Esta topología multi-ESS describe un escenario en el que existe más de un ESS. Cuando un cliente móvil se une a la AP, puede unirse a una de las ESSS disponible. Figura 1-6 muestra la red ESS múltiple. Figura 11 Configuración Multi-ESS.. [Citado el 28 de Octubre de 2015] disponible en < bit.ly/1Rk1l0Z>. Single ESS Multiple BSS: Esta topología describe un uso donde un FAT AP tiene en su administración lógica única más de una radio. Ambos radios apoyan el mismo servicio establecido en el mismo ESS; pero puesto que el área de cobertura es lógicamente diferente, pertenecen a diferentes BSS. Figura 12 Configuración Single ESS Multiple BSS. [Citado el 28 de Octubre de 2015] disponible en bit.ly/1Rk1l0Z.
(35) Entre los protocolos y estándares empleados en una red inalámbrica local se encuentran: . ANSI/IEEE Std 802.11, 1999 Edition. . IEEE Std 802.11a. . IEEE Std 802.11b. . IEEE Std 802.11g. . IEEE Std 802.11i. . IEEE Std 802.11-2004.
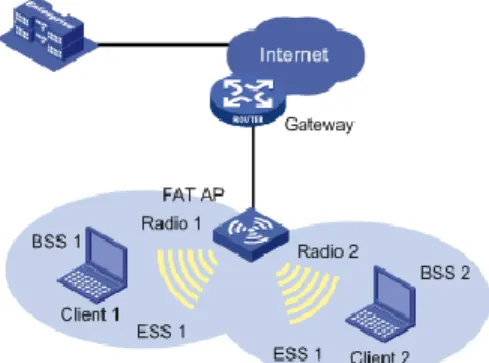
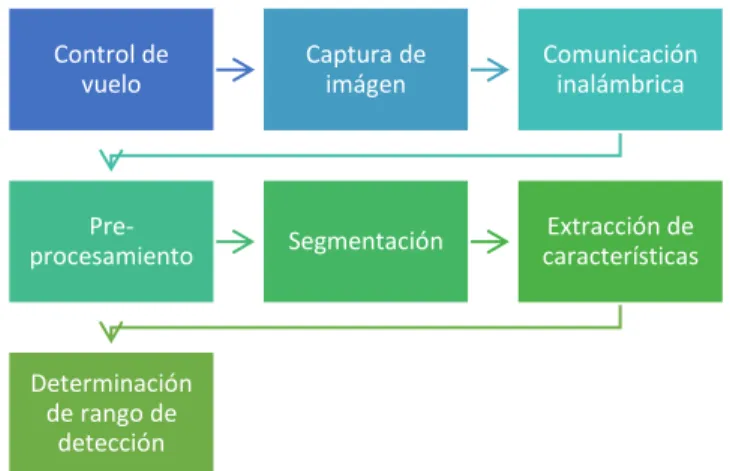
(36) 5. DESARROLLO DE PROPUESTA. En este proyecto se diseña un sistema de control utilizando tecnologías UAV, por lo que el factor más importante a considerar es el tiempo de vuelo que proporciona el drone. La referencia empleada corresponde a DJI Phantom3 Professional, el cual ofrece un periodo de 23 minutos. La ventaja principal que brinda esta referencia en particular es que, además de usar una plataforma de software libre, el periodo de vuelo es suficiente como para que se realice el análisis de una zona rural del departamento de Cundinamarca o aledaños a la Ciudad de Bogotá. Su desempeño también estará afectado por distintos factores ambientales que no podrán ser controlados, pero que se considerarán al momento de realizar su respectivo control automático de vuelo. A continuación, se presenta una descripción detallada del proceso del funcionamiento del sistema final, diseñado como alternativa para la determinación de tiempo justo en la rotación de pastos. Figura 13 Metodología Control de vuelo. Captura de imágen. Comunicación inalámbrica. Preprocesamiento. Segmentación. Extracción de características. Determinación de rango de detección. Fuente autores.. 5.1 CONTROL DE VUELO El Phantom 3 Professional cuenta con un control remoto, que posee un enlace descendente de vídeo integrado Lightbridge HD con puerto de salida USB para.
(37) importar las imágenes tomadas a la memoria del celular o Tablet que se esté utilizando. Este control se combina con la aplicación gratuita “DJI GO”, disponible para plataformas Android y IOS en sus últimas versiones, para brindar diversas funciones en las que se incluyen botones dedicados a fotos o vídeo, inclinación de la cámara, entre otros. Otro punto importante a resaltar es que este modelo de Drone ofrece la configuración de una característica llamada Waypoints. Al contar con un receptor GPS es capaz de almacenar una posición en su memoria. Cada una de esas posiciones almacenadas, es lo que se conoce como Waypoint Los waypoint son puntos que indican una situación de coordenadas dentro del mapa que se marcan voluntariamente, previamente o durante la excursión. Con estos puntos se traza una ruta por adelantado para que posteriormente sea seguida por el vehículo aéreo de manera independiente y a una altura constante, aunque cabe resaltar que la toma de fotos es realizada de manera manual por el usuario y empleando el control remoto previamente mencionado. Los Waypoint se programan a partir de los 10 m de altura y a 5 m de donde se encuentra el control, debido a que este es un punto de referencia cuando el vehículo ya se encuentra ubicado en el punto donde se quiere inicializar. Para configurar esta modalidad se debe seleccionar la función de vuelo en el control, activando el modo inteligente..
(38) Figura 14 Configuración vuelo inteligente.. Fuente autores.. Cuando ya se tenga activada la función de modo inteligente en la pantalla del celular aparecerá una alerta para seleccionar la función de vuelo que se quiera usar. Para este caso se seleccionó la función Waypoints. Figura 15 Configuración Waypoint.. Fuente autores..
(39) Y posteriormente se elige si se agrega una nueva misión o una misión de vuelo ya realizada por el UAV. Primero se sobrevuela la zona donde se quieren tomar las muestras, para evitar posibles accidentes dañando o perdiendo el UAV, los puntos de interés correspondientes a las zonas de toma de muestras se almacenan de manera manual, por el usuario. Figura 16 Configuración puntos de interés.. Fuente autores.. A continuación, se programa la velocidad del UAV con la que se quiere volar por los puntos seleccionados. Gracias al estabilizador de la cámara esta velocidad no afecta el resultado de las fotos, conclusión a la que se llegó tras realizar pruebas, verificando que ninguna foto resultara corrida o algo similar. Para mayor seguridad, se decidió además tomar 3 fotos por punto de interés. También se deberá configurar el proceso que debe realizar el UAV una vez se finalice la misión de vuelo. Existen tres procesos para esta última tarea: volver hacer la ruta de vuelo, volar al último punto seleccionado en la ruta de vuelo activando el control manual, y por último activar la función de retorno a casa..
(40) Figura 17 Configuración del proceso que debe realizar el UAV una vez se finalice la misión de vuelo.. Fuente autores.. Sin embargo, se debe tener presente que este modo inteligente de vuelo sólo es utilizable cuando la señal GPS está lo suficientemente disponible. 5.2 CAPTURA DE IMAGEN Las imágenes tomadas por el drone quedan almacenadas dentro de la carpeta librería que se encuentra disponible en la aplicación DJI GO. Por lo tanto, es necesario seleccionar cada una de las imágenes a utilizar e importarlas a la memoria del dispositivo móvil que se está empleando. En algunos casos, y dependiendo las referencias de los equipos, la importación se realiza de manera automática, sin embargo, para este proyecto se utilizó un celular Samsung S3 en el cual el usuario debe realizar este proceso. 5.3 COMUNICACIÓN INALÁMBRICA La comunicación entre el computador y el dispositivo se logró gracias a la creación de una red de área local inalámbrica, también conocida como WLAN, en donde los equipos se conectan por medio de ondas de radiofrecuencia. Este tipo de redes son de utilidad en esta aplicación porque todos los equipos a utilizar disponen de tarjetas.
(41) de red inalámbricas, y la única condición que se requiere es que estén conectados a un punto de acceso común o un router. Para enviar archivos vía LAN desde el celular al computador y viceversa, es necesario primero y desde el computador, modificar los permisos de acceso a la carpeta que se desea compartir. Todos los permisos se pueden crear, modificar o eliminar manualmente en la pestaña Compartir, en la ficha de Propiedades, que se muestra al dar un clic derecho en cualquier carpeta o archivo. Figura 18 Cambiar propiedades de carpeta a compartir.. Fuente autores.. Los permisos determinan si se puede obtener acceso a un objeto y lo que se puede hacer con él. Los administradores del sistema y los usuarios con cuentas de administrador en los equipos pueden asignar permisos a usuarios individuales o a.
(42) grupos. En el cuadro 1 se encuentran registrados todos los permisos disponibles para asignar.29 Cuadro 1 Descripción niveles de permiso. Nivel de permiso. Descripción. Control total. Los usuarios pueden ver el contenido de un archivo o una carpeta, cambiar los archivos y las carpetas existentes, crear nuevos archivos y carpetas y ejecutar programas de una carpeta.. Leer. Los usuarios pueden ver el contenido de una carpeta y abrir archivos y carpetas.. Escribir. Los usuarios pueden crear nuevos archivos y carpetas, y realizar cambios en los archivos y carpetas existentes.. Fuente Microsoft.. El permiso que se estableció en la carpeta compartida corresponde a control total, ya que se desea escribir, modificar y cambiar los contenidos que se encuentran en la misma. Después, es necesario instalar en el dispositivo móvil la aplicación gratuita “ES Explorador de Archivos”, la cual posee múltiples funciones entre ellas administrar los archivos almacenados tanto localmente como en la red. Sin embargo, hay que tener presente que esta aplicación solo se encuentra disponible para dispositivos Android. Con la aplicación se escanea los dispositivos conectados al punto de acceso, se identifica la dirección ip del computador que posee la carpeta compartida y se establece la conexión. Para visualizar los archivos en el computador, solo basta con 29. Microsoft. ¿Qué son los permisos? [en línea]. RedMond, Whashintong : [30 de Octubre de 2015]. Disponible en internet:< http://windows.microsoft.com/es-419/windows/what-arepermissions#1TC=windows-7 >.
(43) seleccionar desde el carrete de fotos del celular las imágenes que se desean observar y después guardarlas o copiarlas dentro de esta carpeta compartida. 5.4 PRE-PROCESAMIENTO Antes de extraer información directamente de la imagen, se acostumbra a hacer un procesamiento previo de la misma para conseguir otra que permita hacer el proceso de extracción de datos más sencillo y eficiente. Es pertinente recordar que una imagen RGB está compuesta por tres canales: rojo, verde y azul, además de un canal compuesto que se utiliza para editar la imagen. Cada uno de estos canales corresponde a imágenes en escala de grises que almacenan diferentes tipos de información. En este proyecto se optó por trabajar con el canal rojo de la imagen y el método de binarización de Otsu, cuyo principio se rige por la similitud entre píxeles pertenecientes a un objeto y sus diferencias respecto al resto, debido a que era el que presentaba mejores resultados en cuanto a diferenciación verde claro-verde oscuro y pasto-tierra se refiere, como se verá más adelante..
(44) Figura 19 Comparación entre imágenes: imagen original (a, c), imagen binarizada tras procesamiento por método de otsu (b, d).. (a). (b). (c). (d). Fuente autores.. Al aplicar un umbral, T, la imagen en escala de grises, f(x,y), quedará binarizada; etiquetando con ‘0’ los píxeles correspondientes al objeto y con ‘1’ aquellos que son del fondo. Matemáticamente se puede expresar de la siguiente manera:30 𝑔(𝑥, 𝑦) = {. 0 ↔ 𝑓(𝑥, 𝑦) > 𝑇 } 1 ↔ 𝑓(𝑥, 𝑦) ≤ 𝑇. (11). En la Figura 19 se puede observar el resultado tras la aplicación de esta binarización. Al canal rojo de las imágenes originales (19 a y 19 c) se les realiza la umbralización por el método de Otsu, creando nuevas imágenes (19 b y 19 d) conformadas únicamente por pixeles blancos y negros. Las zonas claras toman el valor de 0, mientras que las oscuras el de 1.. 30. Programa de Ingeniería en automatización y control industrial en la Universidad Nacional de Quilmes. Cátedra de Visión Artificial: Segmentación por Umbralización, Argentina. Octubre 2005..
(45) Sin embargo, también se hicieron pruebas con otros métodos de umbralización en donde la imagen no correspondía a uno de los canales RGB, sino que era convertida al completo a otros formatos tales como escala de grises o HSV. Así mismo, se probó el método de Otsu de manera “manual”; es decir, en donde se asignaban valores mínimos y máximos para la binarización de la imagen. Los valores que se asignaron a este umbral se escogieron siguiendo el método de prueba y error, comparando que el resultado que se obtuviera correspondiera con lo que se observaba en la imagen original. Para el valor mínimo se asignó [62,50,50], mientras que para el máximo fue [250,255,255]. Los resultados obtenidos se muestran en la Figura 20. Figura 20 Comparación entre imágenes: imagen original (a, c), imagen binarizada tras procesamiento por método de Otsu asignando valores (b, d).. (a). (c). (b). (d). Fuente autores.. Tal y como se evidencia en la anterior Figura, este método de binarización presenta fallas entre las que cabe resaltar la diferenciación poco constante de colores relacionados al pasto-tierra. Al igual que en el caso anterior, a las imágenes.
(46) originales (20 a y 20 c) se les aplica la umbralización, con la diferencia de que en este caso la imagen original fue previamente convertida a escala de grises. El principal problema con este método es que muchas zonas claras son presentadas como listas para rotación, hecho que se repite al aplicarse sobre porciones de tierra con cierta tonalidad (figuras 20 b y 20 d). Este método se descartó debido a que al comparar los resultados con los arrojados al aplicar el mismo método de manera automática (Ilustraciones 19 y 21), se llegó a la conclusión de que arrojaba datos erróneos que no se podían despreciar. El siguiente procesamiento que se realizó fue igual al anterior, con la diferencia de que los valores para el umbral se determinaban automáticamente. Los resultados obtenidos se muestran en la Figura 21. Figura 21 Comparación entre imágenes: imagen original (a, c), imagen binarizada tras procesamiento por método de Otsu (b, d).. (a). (c). (b). (d). Fuente autores.. Sin embargo, las imágenes obtenidas (Figuras 21 b y 21 d) siguen presentado el mismo problema que mostraban las anteriores; zonas que no estaban listas para.
(47) rotación eran marcadas como si lo estuvieran. Aunque se aprecia una mejora en el reconocimiento, los resultados iguen siendo incorrectos, razón por la cual se decidió por seguir buscando una alternativa que representara una solución más adecuada. 5.5 SEGMENTACIÓN Se eligió emplear la segmentación por color, porque es la característica visible que mejor determina la cantidad de densidad de pasto que puede haber en un lugar. Entre mayor proporción de pasto se encuentre, mayor intensidad de verde tendrá la zona y viceversa. Es importante considerar la relación contraste/brillo en este punto, pues lo que se desea desarrollar es un algoritmo robusto que funcione en exteriores bajo factores que no se pueden controlar, entre ellos la iluminación del lugar. Está segmentación por color generará la aparición de blobs (Binary Large OBject), que no resultan ser más que conjuntos conectados y amorfos de pixeles cuya intensidad es superior al umbral.31 La extracción de blobs se realiza sobre la imagen previamente segmentada según el color de los objetos. De esta manera serán extraídos como blobs todas aquellas agrupaciones de pixeles que tienen un valor de color con una probabilidad alta de correspondencia, es decir, todas las zonas blancas presentes en la imagen, quienes representan la porción del terreno en las que el pasto se encuentra en mayor medida, para seguidamente conocer el porcentaje que ocupan en la imagen. 5.6 EXTRACCIÓN DE CARACTERÍSTICAS Como resultado del paso anterior se obtiene un conjunto de blobs que facilitan la extracción de características, haciendo posible conocer la medida exacta de pixeles que ocupan estas agrupaciones y la relación en la que se encuentran presentes con respecto a la matriz total de la imagen.. 31. JIMÉNEZ GONZÁLEZ, Adrián. Percepción Activa para Seguimiento de Objetos en Entornos Urbanos. Master en Automática, Robótica y telemática. España. Universidad de Sevilla. 2009.
(48) Como se mencionó anteriormente, la característica que se tuvo en cuenta principalmente fue la coloración de la zona, pues por medio de la observación se llegó a la conclusión que los terrenos que presentaban mayor densidad de forraje, eran más oscuros que aquellos en donde todavía no estaba listo. El principal problema al utilizar esta característica es que las imágenes se ven afectadas, entre otros factores, por las condiciones de iluminación, y más si se tiene en cuenta que la aplicación funcionará en ambientes no controlados. A pesar de esto, se encontró que la cámara que se está utilizando, la cual es HD y posee configuraciones autoajustables según el ambiente, permitía hacer la discriminación que se buscaba en este proyecto, sin mayores complicaciones. Aunque sí se presentaron algunos casos en donde las muestras se veían afectadas por la iluminación, ya que se tomaron cuando el sol estaba irradiando demasiado dándole una coloración amarillenta al terreno, eran muchas más las fotografías con el tono y contraste que se esperaba. Hay que tener presente que la cámara se ajusta después de unos segundos sobre el terreno, opacando la imagen y dando la oportunidad de tomar una fotografía que presente los matices de verde propios para la correcta umbralización, sin que se tenga que buscar alternativas más complejas y costosas. También el hecho preventivo de tomar varias fotos del mismo punto permite que se descarten aquellas fotografías afectadas por la iluminación. 5.7 DETERMINACIÓN DE RANGO DE DETECCIÓN Es importante considerar que en el pastoreo rotacional el momento propicio para ocupar nuevamente el potrero es aquel en el que el pasto está en pleno crecimiento y no se ha lignificado. De tal forma que sus contenidos de proteína y energía son los apropiados, así como la cantidad de forraje por hectárea. La calificación del terreno se hace de manera cualitativa (baja, media, alta) considerando que un punto de crecimiento bajo se encuentra por debajo de 1 Kg/m2.
(49) y el alto es superior a los 3 Kg/m232.. Sin embargo, también se debe complementar esta calificación cualitativa con una calificación cuantitativa, asignando un valor de representatividad a cada nivel de crecimiento. Este porcentaje debe ser un estimado de lo que visualmente ocupa en el área total cada nivel de crecimiento, de modo que al ponderar los resultados se pueda obtener una medida más precisa. El porcentaje utilizado en este proyecto, que establece si la zona está lista o no para rotación corresponde al 70%. Este valor se determinó por observaciones hechas en terrenos, además de sugerencias de personas especializadas en el campo, pues según muestras obtenidas a partir de este porcentaje el forraje ya está maduro y llegando al punto superior de crecimiento, lo que permite concluir que la zona está lista para pastoreo. Este proceso se realiza con todas las imágenes que conforman el terreno, para este caso solo se requieren seis, en donde el programa comparará cada uno de los seis porcentajes obtenidos determinando cuáles zonas están listas para rotación. Además, se realizó la conformación del terreno total haciendo uso de las coordenadas GPS de las imágenes, con el fin de generar una imagen total del terreno estudiado, que agrupa toda la serie de imágenes y a la que también se le realizará el proceso anteriormente descrito. 5.8 INTERFAZ GRÁFICA La interfaz gráfica se diseñó bajo la idea de ser amigable para el usuario y no necesitar conocimientos previos para ser utilizada. Básicamente cuenta con dos botones, uno que se encarga de cargar las imágenes que serán posteriormente procesadas, y el otro que justamente se encarga de iniciar este proceso, tal y como se muestra en la Figura 22.. 32. SITIO ARGENTINO DE PRODUCCIÓN ANIMAL. ¿Cómo aforar un pastoreo para pastorear correctamente? [en línea] MICHAEL RUA, F. [2015, septiembre 20]. Disponible en internet < bit.ly/1ZilvrJ >.
(50) Figura 22 Interfaz gráfica Sistema para supervisión de pastoreo.. Fuente autores.. Como se mencionó anteriormente, el programa requiere seis imágenes que constituyen una zona global para la determinación del estado del potrero para rotación, las cuales deberán ser seleccionadas por el usuario. Para evitar que se generen errores debido a equivocaciones en la secuencia de carga, se aseguró que sin importar la imagen que se seleccione primero, la ubicación de las mismas en el terreno general no cambiará. Cuando se termina de cargar todas las imágenes, el programa mostrará la reconstrucción del terreno original. También está en la capacidad de establecer la altitud media a la que fueron tomadas estas fotos, para garantizar que el usuario conoce los datos e información pertinente acerca de todo el procedimiento..
(51) Figura 23 Interfaz gráfica tras cargar las seis imágenes. Fuente autores.. Al iniciar el procesamiento, se generarán dos imágenes: la primera corresponde a la imagen del terreno total tras ser aplicado el Método de Otsu, y la segunda solo representará las zonas de la parcela en la que el porcentaje de pasto es suficiente para iniciar la rotación. Estas imágenes indicadoras vendrán debidamente señalas por nombre y puntos geoespaciales. Si el terreno no está listo para pastoreo, el programa lanzará una alarma que indicará este hecho, y así mismo se imprimirá también el valor del porcentaje calculado..
(52) Figura 24 Interfaz gráfica ante porcentaje insuficiente.. Fuente autores. Por el contrario, si el terreno está listo el programa generará una advertencia y de igual manera indicará el valor del porcentaje. Figura 25 Interfaz gráfica ante terreno listo para rotación. Fuente autores..
(53) 6. ANÁLISIS DE RESULTADOS. Con el fin de lograr los objetivos planteados, se presentan los resultados obtenidos de las muestras realizadas en campo, además, con esta información es posible evaluar el desempeño del algoritmo. Para el análisis se emplearon 3 tipos de fotos diferentes, donde inicialmente en cada toma se procuraba comparar en la misma foto dos terrenos donde una porción de la foto ya se encuentra lista para rotar y la otra porción no. Las fotografías fueron tomadas a una altura constante en las primeras horas de la mañana, para que la luz fuera lo más clara y favorecedora posible. Figura 26 Comparación a imagen original (a) e imagen tras procesamiento (b).. (a). (b). Fuente autores. Es sencillo evidenciar como las zonas con menos concentración de pasto toman valores de 1, es decir, la porción de la imagen representada en color negro, mientras que a una mayor densidad lo que prevalece es el blanco. Siguiendo esta lógica, se procede a hallar la relación existente entre ambos valores de pixeles, encontrando un porcentaje que determina si el terreno está listo o no para pastorear. En este caso, el porcentaje obtenido fue de 44.27%; es decir, se encuentra listo para rotación. Para el segundo tipo de imagen se procuró identificar un terreno con muy poco pasto en su mayoría. Además, se agregaron elementos como una manguera y una parte.
(54) de la cerca que delimita el terreno. Esto, con el fin de analizar el comportamiento del algoritmo ante la presencia de objetos ajenos al objetivo que se desea identificar. Figura 27 Comparación imagen original (a) e imagen tras procesamiento (b).. (a). (b). Fuente autores. Porcentaje obtenido: 23.09% En algunos casos las zonas cafés demasiado oscuras son consideradas verdes y por tanto, marcadas de color blanco, es por esta razón que se decidió analizar el cañar rojo de una imagen RGB, debido principalmente a los matices rojos presentes en la tierra. Con respecto a los elementos ajenos, se observa como su presencia no altera el procesamiento de imagen, y ambos son despreciados sin agregar porcentajes de error al resultado obtenido. El último tipo de imagen que se identificó presenta varias tonalidades de verde con el fin de observar si el algoritmo se ve afectado por estos matices, o en realidad es capaz de realizar el procesamiento de la manera adecuada. Figura 28 Comparación imagen original (a) e imagen tras procesamiento (b).. (a) Fuente autores. (b).
(55) Porcentaje obtenido: 39.48% Se puede observar como el algoritmo sigue siendo capaz de identificar las zonas con las tonalidades más oscuras, discriminándolas de las más claras. Estos análisis permiten concluir que el algoritmo funciona correctamente, sin mencionar que los porcentajes obtenidos se a semejan mucho a los esperados. En cuanto a programación del vuelo del drone, es necesario tener en cuenta la distancia a la que se deberán tomar las fotografías y lograr recrear todo el terreno de manera fiable. Este fue el principal problema que se tuvo en la realización de este proyecto, ya que muchas veces estas distancias se pasaron por alto y aunque los resultados son los esperados, pues a partir de la experticia de las personas que trabajan en rotación de potreros, previamente fueron indicadas las zonas que estaban aptas para la realizacion del proceso, la imagen del terreno que se está analizando no posee mucha coherencia..
Figure



+7




Documento similar
En la Figura.1.1, se muestra el diagrama de bloques del sistema propuesto en este trabajo de grado, donde a partir de una imagen de una lesión cutánea a través del pre-
Es decir, si consideramos la figura femenina como Hispania, a pesar de no lle- var atributo alguno que la identifique, estaríamos ante un cuadro iconográfico que reflejaría, por
La recuperación histórica de la terciaria dominica sor María de Santo Domingo en los últimos años viene dada, principalmente, por causa de su posible influjo sobre personajes
Esto nos da lugar a un nuevo problema: para los pixeles situados en los bordes de nuestra imagen, la ventana recogerá una parte de valores nulos (ver figura 4-4). En una
Figura 7: a) Imagen original; b) Imagen tras apertura; c) Imagen tras cierre.. La siguiente figura muestra un ejemplo de la erosión en niveles de gris. La imagen que aparece en la
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
Nos ba- samos entonces en numerosos nombres, de los que resaltaremos el del pintor Francisco Reigón, que aparece tanto en las poesías 31 , como escrito en sus respectivas
