Esquemas de Control Predictivo Para Regular la Presión de Vapor Sobrecalentado en una Central Termoeléctrica de Ciclo Combinado Edición única
116
0
0
Texto completo
(2) INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY. CAMPUS MORELOS. DIVISIÓN DE GRADUADOS E INVESTIGACIÓN. ESQUEMAS DE CONTROL PREDICTIVO PARA REGULAR LA PRESIÓN DE VAPOR SOBRECALENTADO EN UNA CENTRAL TERMOELÉCTRICA DE CICLO COMBINADO.. TESIS QUE PARA OBTENER EL GRADO DE: MAESTRO EN CIENCIAS COMPUTACIONALES ESPECIALIDAD EN SISTEMAS DIGITALES Y DE CONTROL. Presenta:. Francisco Galindo Aburto.
(3) Noviembre de 1996. ESQUEMAS DE CONTROL PREDICTIVO PARA REGULAR LA PRESIÓN DE VAPOR SOBRECALENTADO EN UNA CENTRAL TERMOELÉCTRICA DE CICLO COMBINADO. ASESORES:. M.C. GUADALUPE MADRIGAL ESPINOSA Unidad de Control e Instrumentación Instituto de Investigaciones Eléctricas. DR. RICARDO FERNÁNDEZ DEL BUSTO División de Ingeniería y Ciencias Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Morelos.
(4)
(5) DEDICATORIAS. A Esmeralda.. A Ercilia, Hector Miguel y Diego Alfredo, espero que algún día logren entender que el hogar no es un lugar, sino un sentimiento.. i.
(6) AGRADECIMIENTOS. A mi ma Hercilia, por todo tu apoyo, cariño, comprensión y financiamiento económico, créeme que ayudaste a hacer un poco de desarrollo tecnológico en México. Al M.C. Guadalupe Madrigal, por darme una formación y maquilar en su cabeza este trabajo. Al Dr. Ricardo Fernández, por ser mi maestro y asesor en la teoría de control. A los Doctores José Ruiz Ascencio y Rogerio Enríquez Caldera y al M.C. Alejo Mosso Vázquez, por sus observaciones y comentarios en beneficio del trabajo de tesis. Al pueblo de México, por el financiamiento durante el tiempo que duraron mis estudios. A mi amigo Marco, el único que ha aguantado todas mis tonterías. A Francis, además de agradecerte todo, espero que me perdones todo. A Pedro Najera y Miguel de Olarte, por ayudarme a estudiar, sin su ayuda hubiera reprobado. A José Luis, Silvia, Carlos, Rocío, Salvador, Vicky y Diana, por ser buenos amigos. A Santa, por haber creído en mi. Y a mi maestra Carol, la semilla que sembraste esta creciendo.. ii.
(7) RESUMEN. El presente trabajo muestra la implementación de los esquemas de control predictivo: Control Predictivo Generalizado ( GPC por sus siglas en inglés ) y Asignación de Polos Generalizado ( GPP por sus siglas en inglés), con el objetivo de regular la presión de vapor sobrecalentado, del ciclo de vapor, en una Central Termoeléctrica de Ciclo Combinado. La implementación tiene una doble finalidad: buscar esquemas alternos de control que regulen más eficientemente la variable de interés e incursionar en el estudio y aplicación del control adaptable. Siguiendo la filosofía de los controladores predictivos, se muestra una metodología para la identificación del sistema de vapor sobrecalentado, así como para la implementación de este tipo de controladores. Se hace una comparación clara y objetiva entre ambos esquemas (desde el punto de vista teórico y práctico) para finalmente compararlos con el esquema de control convencional.. iii.
(8) ÍNDICE GENERAL. Página Dedicatorias Agradecimientos Resumen Índice General Lista de Figuras Lista de Tablas CAPÍTULO 1. INTRODUCCIÓN. 1.1) Control Predictivo. 1.2) El Sistema de Vapor Sobrecalentado. 1.3) Objetivos. 1.4) Justificación. 1.5) Organización de la Tesis.. i ii iii iv vii x 1 1 4 5 6 7. CAPÍTULO 2. EL PROCESO: SISTEMA DE VAPOR SOBRECALENTADO. 2.1) Necesidad de la Cogeneración. 2.2) Unidad Termoeléctrica de Ciclo Combinado. 2.2.1) Ciclo Brayton. 2.2.2) Ciclo Rankine. 2.3) Funcionamiento de la Planta. 2.4) El Sistema de Vapor Sobrecalentado. 2.4.1) Sobrecalentadores. 2.4.2) Válvula de Atemperación. 2.4.3) Válvulas de Control. 2.4.4) Válvula de Paso. 2.5) Esquema de Control Convencional para Regular la Presión de Vapor Sobrecalentado. 2.6) Modelo Aproximado de la CTCC. 2.7) Sumario. CAPÍTULO 3. IDENTIFICACIÓN DEL SISTEMA DE VAPOR SOBRECALENTADO EN UNA CENTRAL TERMOELÉCTRICA DE CICLO COMBINADO.. 8 8 8 9 9 11 13 13 13 14 14 14 15 17. 18. iv.
(9) 3.1) Metodología. 3.2) Escenario de Pruebas. 3.2.1) Proceso a Identificar. 3.2.2) Pruebas a Realizar. 3.2.3) Señales de prueba. 3.3) Pruebas de Respuesta al Escalón y Tiempo de Muestreo. 3.3.1) Respuesta al Escalón. 3.3.2) Intervalo de Muestreo. 3.3.3) Relación entre la Señal de Prueba, Respuesta al Escalón e Intervalo de Muestreo. 3.4) Elección del Conjunto de Modelos. 3.4.1) Estructura de los Modelos. 3.4.2) Orden de los Modelos. 3.4.3) Conjunto de Modelos. 3.5) Aplicación del Método. 3.5.1) Preprocesamiento de los Datos. 3.5.1.1) Resultados Usando Preprocesamiento. 3.5.1.2) Análisis de Resultados. 3.5.2) Modelo Elegido. 3.5.3) Estimación en Línea. 3.5.4) Estimación del Parámetro de Polarización. 3.6) Validación. 3.6.1) Validación Cruzada. 3.7) Sumario.. 18 20 20 21 22 23 23 25 26 26 26 27 28 29 30 30 32 33 33 34 35 36 37. CAPÍTULO 4. ALGORITMOS DE CONTROL PREDICTIVO GPC Y GPP. 38 4.1) Introducción. 4.2) Modelos de Sistemas Lineales. 4.3) Control Predictivo. 4.3.1) Control Predictivo Generalizado (GPC). 4.3.1.1) La Ley de Control. 4.3.1.2) Algoritmo GPC. 4.3.1.3) Ecuación de Lazo Cerrado. 4.3.2) Asignación de Polos Generalizado (GPP). 4.3.2.1) La Ley de Control. 4.3.2.3) Criterio de Lazo Cerrado. 4.3.2.4) Algoritmo GPP. 4.4) Sumario. CAPÍTULO 5. IMPLEMENTACIÓN Y PRUEBAS. 5.1) Introducción. 5.2) Algoritmos de Control Predictivo en la CTCC. 5.2.1) Método de Estimación.. 38 40 42 43 46 49 50 52 54 55 58 59 60 60 60. 61. v.
(10) 5.2.2) Controlador. 5.2.2.1) Filtrado. 5.2.2.2) Parámetros de los Controladores GPC y GPP. 5.3) Conjunto de Pruebas y Resultados. 5.3.1) Pruebas en Operación Normal. 67 5.3.1.1) Movimientos de Carga en TV. Análisis de Resultados. 5.3.1.2) Cambios en el Punto de Operación. Análisis de Resultados. 5.3.1.3) Cierre del Interruptor del Generador Acoplado a la TV. Análisis de Resultados. 5.3.2) Contingencias. Análisis de Resultados. 5.4) Sumario. CAPÍTULO 6. CONCLUSIONES. 6.1) Esquemas de Control Predictivo (ECP). 6.2) Comparación de los Esquemas de Control. 6.3) Metodología de Diseño. 6.4) Técnicas de Identificación. 6.5) Productos Obtenidos. 6.6) Trabajos Futuros.. 65 65 66 67 67 69 70 73 73 74 74 77 78. 80 80 80 81 82 83 83. APÉNDICES. APÉNDICE A. ALGORITMOS DE ESTIMACIÓN RECURSIVA. A.1) Modelo para Identificación. A.2) Estimación Paramétrica. A.2.1) Estimación por Mínimos Cuadrados. A.3) Estimación Recursiva por Mínimos Cuadrados (RLS). A.3.1) Algoritmo RLS. A.4) Estimación Recursiva por Factorización U-D. APÉNDICE B. SOLUCIÓN DE ALGUNAS ECUACIONES DE LOS CONTROLADORES PREDICTIVOS. B.1) Ecuación Diofantina. B.1.1) Algoritmo para Resolver la Ecuación Diofantina. B.2) Matriz Dinámica. B.2.1) Algoritmo para Calcular la Matriz Dinámica. REFERENCIAS.. A-1 A-1 A-1 A-2 A-5 A-8. B-1 B-1 B-3 B-4 R-1. VITA.. vi.
(11) LISTA DE FIGURAS. Figura. Descripción. Página. 1.1 1.2. Diagrama a bloques de un controlador adaptable. Sistema de vapor sobrecalentado en una CTCC.. 2 4. 2.1 2.2 2.3 2.4 2.5 2.6 2.7. Ciclo Brayton (forma simple) para una turbina de gas y su gráfica T-S. Ciclo Rankine (forma simple) de una turbina de vapor y su gráfica T-S. Diagrama esquemático de una central termoeléctrica de ciclo combinado. Ciclo de vapor en una CTCC (se muestra un solo HRSG). Esquema de control convencional para el sistema de vapor sobrecalentado. 14 Punto de ajuste para PVR. Estructura del modelo de una CTCC utilizada para la validación de algoritmos de control.. 9 10 11 13. Metodología de la estimación como un problema iterativo. Diagrama a bloques del sistema de control convencional. Respuesta del proceso al escalón. (a) Carga base, (b) carga intermedia, (c) carga mínima. Señales a utilizar para la estimación: (a) entrada de prueba, (b) salida del proceso a la entrada mostrada. Estimación del modelo (3.5). (a) Parámetros de A, (b) Parámetros de B, (c) salida real Vs. simulada. Estimación del modelo (3.6). (a) Parámetros de A, (b) Parámetros de B, (c) salida real Vs. simulada. Parámetros estimados en línea usando el RLS para el modelo (3.13). (a) Parámetros del numerador, (b) parámetros del denominador. Parámetros estimados en línea usando el UDU para el modelo (3.13).. 20 20. 3.1 3.2 3.3. 3.4. 3.5. 3.6. 3.7. 3.8. 15 17. 24. 29. 31. 32. 34. vii.
(12) (a) Parámetros del numerador, (b) parámetros del denominador. Figura 3.9. Descripción. 34 Página. Validación cruzada utilizando el UDU, se muestra la salida real Vs. simulada cuando la entrada es una señal pseudoaleatoria de longitud 2047.. 36. 4.1. Diagrama a bloques del sistema de lazo cerrado utilizando GPC.. 51. 5.1. Control de la planta (5.1) utilizando el algoritmo GPC. (a) Se utiliza RLS para estimación; (b) se utiliza UDU para estimación. Control de la planta (5.1) utilizando el algoritmo GPP. (a) Se utiliza RLS para estimación; (b) se utiliza el UDU para estimación. 63 Esquema de control predictivo para el sistema de vapor sobrecalentado en una CTCC. Comportamiento de PVR ante movimientos de TV en carga base, cuando las válvulas de control se cierran en un 10%. Comportamiento de PVR ante movimientos de TV en carga intermedia, cuando las válvulas de control se cierran en un 10%. 68 Comportamiento de PVR ante movimientos de TV en carga intermedia, cuando las válvulas de control se abren en un 10%. Comportamiento de PVR ante movimientos de TV en carga mínima, cuando las válvulas de control se abren en un 10%. Comportamiento del sistema de vapor sobrecalentado ante cambios en el punto de operación de CI a CM: (a) PVR para los tres controladores, (b) señal de control producida por el PI, (c) señal de control producida por el GPC, (d) señal de control producida por el GPP. Comportamiento del sistema de vapor sobrecalentado ante cambios en el punto de operación de CI a CB: (a) PVR para los tres controladores, (b) señal de control producida por el PI, (c) señal de control producida por el GPC, (d) señal de control producida por el GPP. Comportamiento de PVR cuando se cierra el interruptor principal del generador acoplado a la turbina de vapor. Disparo de la TV en el punto de operación CM. (a) PVR para los tres controladores, (b) comparación de las señales de control del PI y del GPC, (c) comparación de las señales de control del PI y del GPP.. 5.2. 5.3 5.4 5.5 5.6 5.7 5.8. 5.9. 5.10 5.11. 62. 65 68. 69 69. 71. 72 73. 75. viii.
(13) 5.12. Disparo de la TV en el punto de operación CI. (a) PVR para los tres controladores, (b) comparación de las señales de control del PI y del GPC, (c) comparación de las señales de control del PI y del GPP. Figura Descripción. 5.13. Disparo de la TV en el punto de operación CB. (a) PVR para los tres controladores, (b) comparación de las señales de control del PI y del GPC, (c) comparación de las señales de control del PI y del GPP.. 76 Página. 77. ix.
(14) LISTA DE TABLAS. Tabla. Descripción. 1.1. Algunas aplicaciones de los controladores GPC y GPP.. 3.1. Características de la respuesta al escalón del proceso a diferentes puntos de operación, ver [Ogata80] para definiciones.. 4.1 4.2 4.3. Principales algoritmos LRPC. Parámetros de ajuste para el controlador GPC. Parámetros de ajuste del GPP.. 5.1 5.2 5.3 5.4 5.5. Valores iniciales utilizados para el estimador . Parámetros utilizados por los controladores GPC y GPP. Puntos de operación de la CTCC. Resultados comparativos de las pruebas en movimientos de TV. Resultados comparativos de la prueba de cierre del interruptor principal de acoplo. Resultados comparativos de las pruebas de disparo de la TV.. 5.6. Página 3. 25 39 50 59 64 66 67 70 74 78. x.
(15) CAPÍTULO 1. INTRODUCCIÓN “Adaptive control on-line is indeed the most enticing problem of control theory “. J. Richalet 1 1.1) Control Predictivo. S. i miramos retrospectivamente a la historia del control, podremos darnos cuenta que uno de los problemas dentro de esta área es el desconocimiento del proceso y ambiente a controlar. Aún cuando tengamos conocimiento de las ecuaciones que gobiernan la dinámica del proceso, prácticamente nunca conocemos en forma plena todos los parámetros que intervienen en dicha dinámica. Los esquemas de control convencional, los cuales son diseñados asumiendo que el proceso es lineal e invariante en el tiempo en un punto de operación dado, tienen un buen desempeño si los parámetros del controlador han sido seleccionados en forma correcta. Cuando la dinámica del proceso nos lleva a puntos de operación en los cuales las suposiciones hechas de linealidad e invarianza en el tiempo dejan de tener validez, o si los parámetros del proceso cambian debido a diversos factores (perturbaciones externas, degradación de equipo, etc.), el desempeño de los esquemas de control convencional se ve disminuido. Los esquemas de control adaptable o auto-ajustable2 (se usarán ambos términos en forma indistinta) proveen mecanismos adecuados para manejar ciertos procesos de los cuales se conoce muy poco su dinámica, sus parámetros son desconocidos, son no lineales o. 1. “ El control adaptable en línea, es de hecho, el problema más atractivo de la teoría del control ”. Tomado de: [Richalet93], pp. 1272. 2 En la literatura pueden encontrarse ambos términos, en escencia ambos convergen a la misma idea, solo por razones históricas tienen significados diferentes. Encontramos entonces que en un problema auto-ajustable, el proceso a controlar tiene parámetros constantes pero desconocidos. En un esquema de control adaptable, asumimos que los parámetros están cambiando con el tiempo [Åström89]. Diferentes puntos de vista del mismo problema.. 1.
(16) variantes en el tiempo. Dentro de la literatura del control auto-ajustable, la idea que ha prevalecido es la de ajustar controladores que sean más complejos que los tradicionales PID. La idea básica de un sistema adaptable es construir un algoritmo que cambie en forma automática sus parámetros, para funcionar adecuadamente en una situación en específico o para cumplir ciertos requerimientos solicitados con anterioridad. Esta tarea se realiza añadiendo un mecanismo de ajuste el cual monitorea el proceso y entonces ajusta los coeficientes del correspondiente controlador para mantener el desempeño requerido. El mecanismo de ajuste se basa en la estimación o identificación del proceso y ésta forma parte del algoritmo de control.. Parámetros del proceso Criterio de diseño. Síntesis. Estimación. Parámetros del controlador Referencia y. u Controlador. Proceso. Figura. 1.1.- Diagrama a bloques de un esquema de control adaptable.. Los esquemas de control adaptable pueden ser vistos como un sistema compuesto de dos lazos (ver figura 1.1); un lazo interno, que es la retroalimentación ordinaria de todo controlador, para formar una señal de error y, un lazo externo que se encarga de actualizar los parámetros del controlador. El lazo externo esta compuesto por un estimador recursivo de parámetros del proceso y un bloque de síntesis. Los tres elementos principales de un esquema de control adaptable son [Åström89]. 1. Una retroalimentación en forma de ecuación de diferencias, en la que actúan valores de señales medidas de salida y referencia 2. Un estimador de parámetros recursivo, que monitorea entradas y salidas del proceso. 3. Un algoritmo de control, que acepta las estimaciones actuales para calcular una nueva señal de control, por medio de una regla de síntesis de acuerdo con un criterio de desempeño.. 2.
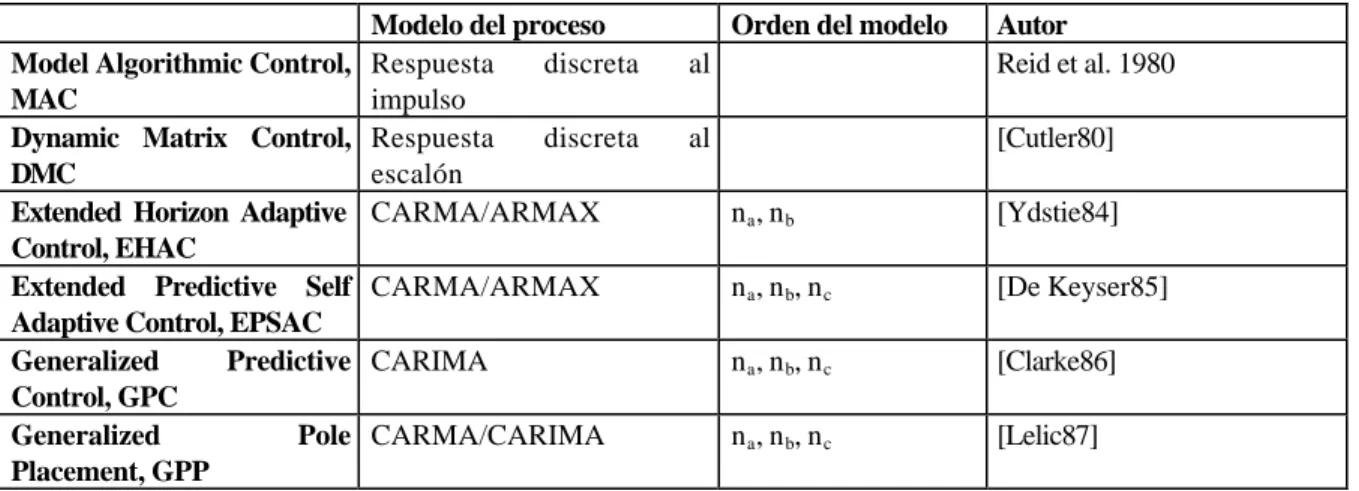
(17) Este tipo de controladores puede representar un proceso automatizado de las etapas de modelado, diseño y síntesis asociadas con la ingeniería del control. Cuando se diseña usando técnicas tradicionales, generalmente se repite la secuencia de diseño en varias ocasiones hasta obtener el funcionamiento deseado; ésto lleva a consumir tiempo y esfuerzo considerable. Una de las principales ventajas de los esquemas de control adaptable, es que la secuencia de diseño se realiza en línea, usualmente en tiempo real, en una manera tal que el proceso de validación y puesta en operación es mucho más rápido. Los esquemas de control adaptable están divididos en dos áreas: tradicionales y predictivos generalizados. Dentro de los tradicionales podemos mencionar dos principales esquemas [Wellstead91]: Asignación de Polos y Mínima Varianza. El objetivo de los métodos de control predictivos (también llamados de horizonte de predicción), es obtener un control óptimo mediante la minimización de una función de costo multietapa. Este tipo de controladores, además de hacer los cálculos de un controlador adaptable, predicen la respuesta del sistema a acciones de control de modo tal que minimizan una función de costo que puede ser, entre otras: • Varianza • Integral del error cuadrático. • Integral de la magnitud absoluta del error. Dos esquemas de control predictivo de los cuales se encuentran reportes de aplicaciones exitosas en la literatura de la última década son (ver tabla 1.1): • Control Predictivo Generalizado ( GPC -por sus siglas en inglés- ). • Asignación de Polos Generalizado ( GPP -por sus siglas en inglés- ). Estos esquemas aún retienen la flexibilidad en el diseño y desempeño de sus esquemas predecesores (Mínima Varianza Generalizado y Asignación de Polos, respectivamente), pero no sufren de la pérdida de robustez causada por elecciones incorrectas del tiempo muerto de la planta o el orden del modelo Tipo de proceso -Industria del Cemento -Manipuladores robóticos Caldera en planta de energía Intercambiadores de calor Caldera en planta de energía Turbina en planta de energía Manipuladores robóticos Turbina en planta de energía. Referencia [Clarke88]. Tipo de controlador GPC. [Hogg90] [Chan90] [Rossiter91] [González94] [Lelic87] [Muñoz94]. GPC GPC GPC GPC GPP GPP. 3.
(18) Tabla 1.1.- Algunas aplicaciones de los controladores GPC y GPP. Aún cuando la utilización de esquemas adaptables dentro de la industria de control de procesos está en creciente aumento, ésta es todavía mínima. La aceptación de estos esquemas está creciendo debido a su confiabilidad, robustez y capacidad de ajuste automático, características muy deseables dentro de los procesos industriales.. 1.2) El Sistema de Vapor Sobrecalentado. La generación de energía eléctrica a través de centrales termoeléctricas, desempeña un papel importante en la satisfacción de la demanda de energía eléctrica del país. En México, cerca del 70% [López96] de la capacidad total de MegaWatts instalados, son producidos en centrales termoeléctricas que consumen combustóleo, carbón o gas. Un tipo de estas centrales son las Centrales Termoeléctricas de Ciclo Combinado (CTCC). Dichas centrales reciben este nombre debido a que transforman la energía calorífica del combustible utilizado en energía eléctrica, mediante el empleo de dos ciclos termodinámicos (Brayton y Rankine). Ambos ciclos están divididos dentro de la CTCC en dos etapas de generación: una hecha por una o dos turbinas de gas y la otra por una turbina de vapor. En la primera etapa de generación eléctrica, la energía producida como resultado de la combustión de una mezcla de gas y aire se utiliza para producir un movimiento mecánico giratorio, el cual a su vez se transmite al generador eléctrico que se encarga de transformar finalmente el movimiento mecánico en energía eléctrica. Los gases producto de esta combustión, una vez que han realizado su trabajo en la turbina de gas, se conducen hacia la segunda etapa, en la cual se hacen pasar por un sistema de recuperación de energía donde el agua toma el calor del gas y se convierte en vapor, para finalmente impulsar otra turbina obteniéndose así una segunda etapa de generación eléctrica. Uno de los sistemas más importantes de una CTCC, es el sistema de vapor sobrecalentado, este sistema está inmerso dentro de la etapa de generación hecha por la turbina de vapor. Esta etapa es diseñada para mantaner cualidades importantes dentro de la central tales como: arranque rápido, buena capacidad de ciclo, etc. El sistema de vapor sobrecalentado (figura 1.2) fué diseñado para ayudar a cumplir estos objetivos.. 4.
(19) Del otro recuperador. Válvula de control superior. Recuperador de calor Turbina de vapor Domo Válvula de control inferior. Sobrecalentador. Vapor saturado Válvula de atemperación. Quemadores Válvula de combustible. Vapor sobrecalentado. Válvula de paso. Condensador. Figura. 1.2.- Sistema de vapor sobrecalentado de una CTCC.. En el sistema de vapor sobrecalentado, el vapor saturado (proveniente del domo) es secado (en el sobrecalentador) para su expansión en la turbina de vapor. Debido a que la turbina de vapor requiere el vapor sobrecalentado con ciertas características de presión y temperatura, existen dos válvulas de control ( válvula de atemperación y válvula de paso) para mantener siempre las condiciones requeridas.. 1.3) Objetivos Dependiendo del modo de operación en el que se encuentre una CTCC, es necesario controlar los diversos lazos de la misma para tener un desempeño óptimo. La atención del presente trabajo se centra en el lazo del sistema de vapor sobrecalentado, atacando el problema de la línea de paso del vapor sobrecalentado al condensador. El objetivo principal de este trabajo es: • Regular la presión de vapor sobrecalentado de dicho sistema, utilizando los esquemas de control predictivo: GPC y GPP. Utilizando técnicas de simulación. La utilización de los esquemas de control predictivo GPC y GPP se hace persiguiendo dos fines: • Obtener una mejora significativa en el desempeño de los nuevos esquemas con respecto al control convencional (PI) que se utiliza actualmente. • Realizar una comparación objetiva y clara de ambos esquemas de control predictivo, operando bajo las mismas circunstancias y resolviendo el mismo problema. Para realizar la identificación del sistema de vapor sobrecalentado, se proponen dos algoritmos de identificación recursiva: Mínimos Cuadrados Recursivo (RLS -por sus siglas en. 5.
(20) inglés) y Mínimos Cuadrados utilizando factorización UDU ( nombrado UDU); siendo otro de los objetivos: • El análisis y programación de ambos algoritmos para evaluar su funcionamiento dentro de los esquemas de control predictivo. El desempeño de los esquemas de control propuestos se evaluará utilizando técnicas de simulación, debido a que la simulación mediante técnicas computacionales permite ir ensayando hasta llegar a una configuración óptima, sin necesidad de disponer del sistema instalado físicamente, pudiéndose además, elaborar en poco tiempo hipótesis del cómo y por qué de ciertos comportamientos. Para ésto se utilizará un modelo no lineal que simula el comportamiento dinámico de una CTCC en una forma aproximada[Delgadillo96]. Así, se plantea la obtención de un sistema de cómputo el cual nos muestre gráficamente las tendencias de la variable a controlar y las principales variables de interés que afectan al sistema, las tendencias de los parámetros de los controladores predictivos y la opción de poder evaluar en forma rápida y amigable para el usuario, bajo diferentes configuraciones, los esquemas de control predictivo propuestos aplicados al control de modelos discretos de plantas.. 1.4) Justificación La mayoría de las centrales de generación de energía eléctrica que se encuentran en operación hoy en día, fueron instaladas en las décadas de los 60’s y 70’s. Aún cuando en el país se realiza investigación en fuentes alternas de energía, la dependencia de generación eléctrica a través de centrales termoeléctricas no se revertirá significativamente en los próximos 20 años [Gutiérrez95]. Las estrategias de CFE para satisfacer la demanda de energía eléctrica y simultáneamente manejar en forma eficaz los riesgos de inversión en nuevas instalaciones, presentan un enfoque hacia la producción, a menor costo, de más energía eléctrica con la capacidad instalada existente. Esto conduce a la modificación o sustitución de los sistemas de control en las centrales existentes por otros más eficientes. Las características de los controladores predictivos generalizados, los hacen buenos candidatos para el control eficiente de las CTCC. Dichas centrales son sistemas complejos que involucran diversos lazos no lineales y una fuerte interacción entre sus variables críticas; aunado a ésto, la demanda de energía eléctrica varía de acuerdo con la hora del día y la estación del año. Para satisfacer en forma óptima la demanda, la CTCC debe soportar los diversos puntos de operación; el ciclo de vapor debe tener el vapor que utiliza, en condiciones óptimas de presión y temperatura. La línea de vapor sobrecalentado a la caldera, es un sistema importante para mantener las condiciones de presión de vapor que requiere la turbina de vapor, existiendo diversos motivos por los que resulta importante mantener un estricto control sobre esta variable:. 6.
(21) 1. Bajo condiciones de arranque, la turbina de vapor (TV) debe seguir una curva de presión vs flujo, con la finalidad de evitar daños en las partes de la TV. Esta curva debe ser seguida lo más fielmente posible hasta sincronizar correctamente la turbina a su velocidad base. 2. Una vez que la turbina se ha sincronizado es necesario levantar carga, cuando ésto ocurre, las válvulas de control de TV sufren un cambio drástico en su apertura, produciendo entonces una despresurización en la línea. La válvula de paso se encarga de mantener la presión a un mismo nivel, para mantener los MegaWatts necesarios para la carga. 3. Pueden ocurrir diversos disparos (contingencias) tales como: salida de la turbina, salida de la carga, entrada y salida de turbinas de gas, etc. En todos estos casos es necesario un control de la presión de vapor sobrecalentado, para evitar daños en la turbina de vapor. 1.5) Organización de la Tesis El presente trabajo de tesis se organiza en 6 capítulos; en este primer capítulo se delimita el área de trabajo tanto en la rama del control automático como en el problema a atacar. Se aclaran los objetivos y se dan los motivos que condujeron a realizar la presente investigación. En el capítulo 2 se muestra la operación de una CTCC típica y la ubicación del sistema de vapor sobrecalentado dentro de ésta. Se hace el análisis del sistema y se muestra el modelo no lineal que describe la operación de la central y que fué el utilizado para evaluar el desempeño de los controladores diseñados. La identificación del sistema utilizando un estimador recursivo, forma parte de los esquemas de control adaptable, esta identificación evita realizar un modelo matemático detallado del sistema. El capítulo 3 muestra la metodología seguida para la identificación del sistema de vapor sobrecalentado en una CTCC y se muestra la obtención de los modelos utilizando los algoritmos de estimación RLS y UDU. El capítulo 4 es un resumen detallado de los controladores predictivos generalizados GPC y GPP, se muestran las ecuaciones que conforman dichos esquemas hasta derivar en los algoritmos utilizados en el control del sistema de vapor sobrecalentado. El capítulo 5 muestra la aplicación de los controladores GPC y GPP al sistema de vapor sobrecalentado de una CTCC, para regular la presión de vapor. Así mismo, se muestra el protocolo de pruebas realizadas a los tres esquemas de control (convencional, GPC y GPP) operando dentro de la CTCC para establecer un análisis comparativo de los 3 esquemas y la evaluación del desempeño de los mismos. En el capítulo 6 se dan las conclusiones obtenidas a lo largo de este trabajo de tesis, así como recomendaciones de posibles trabajos a futuro relacionados con la investigación presentada.. 7.
(22) Finalmente se incluyen dos Apéndices y las referencias utilizadas en el desarrollo del presente trabajo. En el Apéndice A se muestra la deducción del algoritmo de mínimos cuadrados recursivo ( RLS ) y las bases matemáticas para el algoritmo de estimación UDU, dichos algoritmos complementan los esquemas de control predictivo. El Apéndice B muestra dos ecuaciones de los algoritmos de control predictivo: la ecuación Diofantina y la matriz dinámica, mostrando también los algoritmos utilizados para su solución y cálculo.. 8.
(23) CAPÍTULO 2. EL PROCESO: SISTEMA DE VAPOR SOBRECALENTADO 2.1) Necesidad de la Cogeneración. N. o es difícil entender por qué la demanda de plantas de generación eléctrica de ciclo combinado ha crecido. Esta es una de las formas más eficiente para generar vapor y/o energía eléctrica [Makansi90]. Una planta de ciclo combinado junta en forma típica una turbina de vapor con turbinas de gas en una sóla central para generar energía eléctrica en forma eficiente. Incrementando la eficiencia de la central como un todo y decrementando la contaminación del aire con un mínimo equipo de control, las plantas de ciclo combinado pueden disminuir los costos de la generación eléctrica. Estas plantas exhiben un costo significativamente menor de generación que estaciones eléctricas convencionales alimentadas por combustibles fósiles y nucleares [Makansi90]. Dentro de las ventajas tradicionales que ofrecen las centrales termoeléctricas de ciclo combinado se tiene: •. Adecuadas para situaciones en que se requiere generación eléctrica de emergencia o a corto plazo. • Baja emisión de contaminantes. • Bajo consumo de agua. • Bajo costo de inversión por KW instalado, en comparación con otras centrales. Todas estas ventajas son obtenidas bajo una idea principal: producir más energía eléctrica por la misma cantidad de combustible que se usa en una central convencional [Makansi90] .. 2.2) Unidad Termoeléctrica De Ciclo Combinado Una planta convencional de vapor quema combustible (carbón, gas natural, etc.) para generar calor que convierte agua a vapor en una caldera. El vapor a una presión muy alta entra en una turbina de vapor donde se expande, haciendo girar la turbina que está conectada a un. 8.
(24) generador eléctrico. En una turbina de gas se mantiene el mismo principio, sólo que en lugar de usar como fluido motriz el vapor, éstas usan el producto de la combustión del carburante usado. Un sistema de ciclo combinado es cualquier sistema que combina 2 ciclos de generación de potencia que usan fluidos de trabajo operando a diferentes temperaturas. Las plantas de energía de ciclo combinado son en su forma básica una turbina de gas, cuyo fluido una vez usado para mover una turbina es mandado a un recuperador de calor - generador de vapor (HRSG por sus siglas en inglés) que alimenta a un ciclo de turbina de vapor. El nombre del ciclo combinado deriva de la combinación de dos ciclos termodinámicos; el ciclo Brayton que es realizado en la turbina de gas, y el ciclo Rankine, efectuado en la turbina de vapor.. 2.2.1) Ciclo Brayton.- Este ciclo está compuesto de compresión isoentrópica, adición de calor a presión constante, expansión isoentrópica y expulsión de calor a presión constante. Como se indica en la figura 2.1, el aire entra en un compresor y es comprimido, teóricamente, a entropía constante al punto 2’. La adición de calor toma lugar en la cámara de combustión (teóricamente de 2’ a 3), en realidad existe una pequeña caída de presión en la cámara de combustión. La expansión es isoentrópica al igual que en una turbina de vapor, siguiendo el ciclo teórico, se pasa entonces del punto 3 al 4’. Es importante distinguir entre ciclo abierto y ciclo cerrado, en la figura mostrada se observan los gases descargados a la atmósfera desde la turbina y aire entrando al compresor desde la atmósfera. Este es un ciclo abierto. En un ciclo cerrado, el escape de la turbina se conecta al punto de entrada de aire, los gases que dejan la turbina son “colados” y regresados al sistema.. Combustible Cámara de combustión. Turbina. Compresor. Entrada de aire. Generador. Gases calientes 3 T. 4 2. 4'. 2' 1 S Figura 2.1.- Ciclo Brayton (forma simple) para una turbina de gas y su gráfica T-S. 2.2.2) Ciclo Rankine.- El agua proveniente del condensador se bombea hacia la caldera. El agua llega a un intercambiador de calor llamado economizador, donde adquiere calor proveniente 9.
(25) de la combustión del material fósil y después se deposita en el domo, trayectoria 3-4-5; en el domo se convierte en vapor y posteriormente se sobrecalienta. Este vapor se envía a la turbina, donde se expande produciendo suficiente potencia para hacer girar el eje del generador de energía eléctrica (trayectoria 1-2). El vapor a la salida de la turbina, una vez que ha efectuado trabajo, fluye hacia el condensador en el cual se transforma en líquido, cerrándose así el ciclo [Bautista83].. 1 Turbina. 6. Generador 2. Sobrecalentador. 5. Economizador. Domo. Recuperador. Condensador. Bomba de agua de alimentación 4. 3 5. T. 6. 1. 4. 3. 2. S Figura 2.2.- Ciclo Rankine (forma simple) de una turbina de vapor y su gráfica T-S. En una CTCC, el ciclo Rankine sufre algunas modificaciones, debido a que este tipo de centrales aprovechan el calor de los gases expulsados en el ciclo Brayton, mediante los HRSG. El ciclo Rankine de una CTCC es diferente con respecto al ciclo mostrado básicamente en 3 puntos [Gutiérrez95]. a) El flujo de gases calientes que fluyen por el interior del HRSG son proporcionados principalmente por los gases de escape de una turbina de gas. b) Existe un quemador posterior que adiciona calor a los gases de escape de la turbina de gas antes de entrar al HRSG. c) Existen tantos HRSG’s como turbinas de gas. El funcionamiento del ciclo es el mismo que el descrito anteriormente, con la diferencia que el vapor producido en cada HRSG es sumado antes de entrar a la turbina de vapor y cada recuperador tiene su propio sistema de: economizador, domo y sobrecalentador. 10.
(26) Entre más módulos tiene la planta, se tiene un alto grado de complejidad al operar los sistemas. Consideremos el caso típico en el que se tienen 2 turbinas de gas, acopladas cada una a su respectivo HRSG y una sola turbina de vapor. Algunos de los posibles modos de operación son: •. Una o dos turbinas de gas operando sin pasar por los HRSG. Una o dos turbinas de gas operando, utilizando los HRSG con o sin combustible en los quemadores. • Una o dos turbinas de gas utilizando los HRSG pero con la turbina de vapor fuera de línea. • Una sola turbina de gas utilizando el HRSG con o sin turbina de vapor. •. Dependiendo del modo de operación en el que se encuentra la central, es necesario controlar los diversos lazos de la misma para tener un desempeño óptimo.. 2.3) Funcionamiento de la Planta El diagrama de la figura 2.3 muestra las partes principales que integran una planta de ciclo combinado. Una vez que los gases han trabajado y producido energía en las turbinas de gas1, pasan al recuperador de calor (HRSG). Combustible. Cámara de combustión. Compresor 1. Alimentación de Agua Turbina de gas 1. Válvula de control superior. Generador 1 Motor de arranque 1. Entrada de aire. Recuperador de calor - Generador de vapor 1. Gases calientes. Turbina de vapor. Válvula de control inferior. Combustible a quemadores. Combustible. Compresor 2. Cámara de combustión. Generador 3. Alimentación de Agua. Condensador Válvula de paso. Turbina de gas 2. Alimentación de agua a calentadores Generador 2 Motor de arranque 2. Entrada de aire. Gases calientes. Recuperador de calor - Generador de vapor 2. Combustible a quemadores. Figura 2.3.- Diagrama esquemático de una central termoeléctrica de ciclo combinado.. 1. Los gases producto de la combustión pasan a la TG, haciéndola girar a 3600 rpm, la flecha de ésta se encuentra acoplada a la del generador para producir energía eléctrica.. 11.
(27) En las plantas de ciclo combinado, cada HRSG da el lazo crítico de unión entre las turbinas de gas y la turbina de vapor. Los HRSG para ciclo combinado están generalmente clasificados como de circulación natural y circulación forzada [Makansi90]. En la figura 2.3 se muestran HRSG de tipo circulación forzada; en estos, el tubo de escape de los gases de la turbina de gas fluyen verticalmente pasando por tubos horizontales. El agua de alimentación se bombea a través de dichos tubos. Cada recuperador está diseñado para manejar grandes volúmenes de gases. Los quemadores dentro del ducto de gases se utilizan para proporcionar energía adicional a los gases de escape de la turbina de gas, aumentando la producción de vapor y en consecuencia, incrementando la generación en la turbina de vapor. El vapor expulsado por la turbina de vapor es convertido en agua en el condensador. Esta agua (normalmente llamada condensado) se vierte en el pozo caliente y posteriormente se bombea hacia los deareadores. Los deareadores tienen como objetivo eliminar los gases incondensables (principalmente oxígeno) del agua. Esto lo hacen recibiendo la ayuda de un suministro de vapor conocido como vapor de presurización, además de contar con una línea de venteo para disminuir la presión acumulada. Cada recuperador cuenta con cuatro etapas de calentamiento separadas físicamente e integradas en la misma carcaza. En el evaporador de baja presión, el agua procedente del deareador se precalienta y se manda al tanque de oscilación. El agua que pasa al tanque de oscilación (llamada agua de alimentación) se envía al economizador del recuperador. En el economizador se eleva la temperatura del agua hasta el punto de saturación; esta agua se envía al domo de alta presión que es el encargado de separar el líquido del vapor. El agua saturada del domo de alta presión se extrae por una bomba de recirculación y se envía al evaporador de alta presión ubicado en el HRSG. En este punto se tiene vapor húmedo (o vapor saturado), el cual se regresa al domo. Este vapor sale por la parte superior del domo y llega al sobrecalentador. Esta es la zona de mayor temperatura y es donde se produce vapor seco en las condiciones requeridas por la turbina de vapor. El vapor sobrecalentado se conduce a la turbina de vapor donde se inyecta a través de 2 válvulas de control. La turbina de vapor se encarga de producir la energía eléctrica requerida. En la figura 2.4 se muestra a detalle el ciclo de vapor de la central termoeléctrica de ciclo combinado en el cual solo se observa un HRSG.. 12.
(28) Condensados del pozo caliente Válvula de condensado Válvula de control superior. Recuperador de calor. Dearea dor Válvula Pegging. Válvula de recirculación Evaporador de baja presión. Turbina de vapor. Tanque de oscilacion. Domo. Economizador. Generador eléctrico. Válvula de control inferior. Válvula de agua de alimentación. Válvula de retorno. Evaporador de alta presión. Condensador Válvula de paso (bypass principal). Sobrecalentador. Válvula de repuesto. Gases de escape de T.G. Quemadores. Válvula de atemperación Vapor sobrecalentado hacia la turbina. Combustible a quemadores Válvula de combustible. Figura 2.4.- Ciclo de vapor en una CTCC (se muestra un solo HRSG). 2.4) El Sistema de Vapor Sobrecalentado El sistema de vapor sobrecalentado, el cual incluye sobrecalentadores, válvula de atemperación, válvulas de control y válvula de paso, está diseñado para mantener un buen desempeño de la turbina de vapor en la central, con respecto a capacidad de ciclo y arranque rápido. 2.4.1) Sobrecalentadores .-El vapor saturado que se obtiene como producto de la evaporación al hacer circular agua del domo a los evaporadores de alta presión (ubicados dentro del HRSG), fluye por la parte superior del domo a la sección de tubos del sobrecalentador. Este vapor se hace circular en forma descendente con la finalidad de obtener una mejor transferencia de calor en contracorriente, adquiriendo entonces un mayor calentamiento para convertirse en vapor sobrecalentado con las condiciones necesarias de presión y temperatura. 2.4.2) Válvula de atemperación .- En el sobrecalentador se eleva la temperatura del vapor, sin embargo, esta elevación está limitada en función de los materiales de construcción. Controlando la alimentación de combustible a los quemadores posteriores, se obtiene una primera regulación de la temperatura de vapor sobrecalentado (regulación fuerte). Este control no es suficientemente fino y es por eso la necesidad de la válvula de atemperación. A través de la válvula de atemperación se realiza una regulación fina de la temperatura de vapor sobrecalentado.. 13.
(29) 2.4.3) Válvulas de control.- A través de las válvulas de control (superior e inferior) se inyecta el vapor sobrecalentado a la turbina de vapor. Estas válvulas se encargan de controlar la generación de energía eléctrica aumentando o disminuyendo el flujo de vapor que pasa a la turbina. 2.4.4) Válvula de paso.- Con el fin de poder controlar la generación hecha mediante la turbina de vapor, se encuentra una línea de vapor sobrecalentado que no pasa por ésta, y se dirige directamente al condensador (conocida como bypass de 30’’). Haciendo acciones de control sobre esta válvula se regula la presión de vapor sobrecalentado en la línea. Una ventaja de la válvula de paso es que la central puede operar con las turbinas de gas en ciclo abierto, mientras la turbina de vapor está fuera de servicio.. 2.5) Esquema de Control Convencional para Regular la Presión de Vapor Sobrecalentado Como se mencionó en la sección anterior, la presión de vapor sobrecalentado (PVR) se controla a través de la válvula de paso. El control tiene como objetivo calcular la posición correcta de la válvula de paso bajo diversas circunstancias de operación. La estrategia seguida para el diseño del control convencional (la cuál será también usada para el diseño del controlador predictivo) es regular la presión de vapor a un valor único especificado por las curvas características de presión Vs. flujo de la turbina de vapor, bajo circunstancias dinámicas tales como arranque o bajo disparos (ver capítulo 1). Válvula de control superior. Del otro recuperador Recuperador de calor. Turbina de vapor Domo Válvula de control inferior. Sobrecalentador. Vapor saturado Válvula de paso. Válvula de atemperación Quemadores Válvula de combustible. Condensador Señal de control. Vapor sobrecalentado PT. Control (PI). FT Flujo medido (GVR). Referencia de presión. P G. Presión medida (PVR). 14.
(30) Figura 2.5.- Esquema de control convencional para el sistema de vapor sobrecalentado.. El sistema de control cuenta con dos estados operativos: manual o automático. Durante operación manual, existe un mecanismo de seguimiento de tal forma que cuando el control se transfiera a modo automático, se produzca una transferencia suave hacia el punto de operación indicado. Las entradas al sistema de control son PVR y el flujo de vapor sobrecalentado (GVR), la señal de control generada se aplica a la válvula de paso. La referencia de vapor sobrecalentado se calcula en base a la curva característica PVR Vs. GVR, como se muestra en la figura 2.6.. 1400 1200 1000 800 600 400 200 0 0. 100. 200. 300. 400. 500. Para 2 recuperadores multiplicar el eje "x" por 2 Figura 2.6.- Punto de ajuste para PVR.. 1 uc = Kc e + ∫ edt Ti . (2.1). El controlador es implementado en forma digital con un periodo de muestreo de 1 seg.. 2.6) Modelo aproximado de la CTCC. 15.
(31) representar el comportamiento de un sistema ante diferentes condiciones experimentales. La de for dicho sistema.. [Delgadillo93] para posteriormente ser detallados en [Fuentes94]. Los modelos fueron desarrollados siguiendo las leyes fundamentales de la term. 1. 2. 3. 4. 5. 6.. Turbina de gas. Turbina de vapor. Condensador. Deareador. Controles de la planta.. s un modelo simplificado, a la hora de modelar sistemas puede decirse que se cumple una ley [Ribas94]: un 80% del Los modelos utilizados identifican correctamente la parte reducida y significante. El modelo se desarrollo bajo consideraciones que no afectan sensiblemente el comportamiento del sistema, tales como [Delgadillo96] : 1. 2. 3.. estructurar un co. 16.
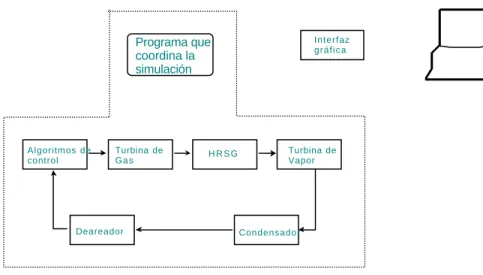
(32) Interfaz gráfica. Programa que coordina la simulación. Algoritmos de control. Turbina de Gas. Deareador. HRSG. Turbina de Vapor. Condensador. Figura 2.7.- Estructura del modelo de una CTCC utilizada para la validación de algoritmos de control.. El modelo está diseñado en una forma completamente modular, de tal forma que para realizar las pruebas de validación sólo es necesario modificar el módulo en donde se encuentran los controladores de la planta, sustituyendo los esquemas convencionales por los nuevos algoritmos programados. Los modelos utilizan el método de integración de Runge-Kutha de segundo orden para dar solución a las ecuaciones diferenciales, utilizando un paso de integración de 0.1 segundos; este tiempo es diez veces menor al tiempo de muestreo de los controladores digitales (1 segundo), de tal forma que mientras el modelo del proceso se ejecuta diez veces, el controlador lo hace una vez. Esto da una buena aproximación al sistema real.. 2.7) Sumario En el presente capítulo se mostró la operación de la CTCC y su relación con el sistema de vapor sobrecalentado (objetivo de control de la presente investigación). Se analiza el esquema de control convencional utilizado actualmente y se de una breve descripción del modelo de la CTCC a utilizar en la evaluación de los esquemas de control a diseñar. Se hace hincapié en la importancia de las técnicas de simulación para la puesta en operación de sistemas complejos, eligiendo el lenguaje C para elaborar la simulación requerida. Aún cuando existen actualmente alrededor de 100 lenguajes distintos de programación de uso comercial, no se debe olvidar que el modelo (algoritmo del proceso) es independiente del lenguaje usado y la elección del lenguaje de programación obedece a necesidades de tipo específico.. 17.
(33) CAPÍTULO 3. IDENTIFICACIÓN DEL SISTEMA DE VAPOR SOBRECALENTADO EN UNA CENTRAL TERMOELÉCTRICA DE CICLO COMBINADO. 3.1) Metodología. C. uando se intenta resolver un problema de identificación dentro del área de control automático, siempre se busca alguno de los siguientes objetivos [Åström71]: • •. Realizar experimentos en el sistema para obtener conocimiento pleno de éste. Diseñar una estrategia de control.. En la formulación del problema de identificación, es importante tener el propósito presente. En este trabajo, el objetivo final es diseñar una estrategia de control para un sistema particular, aun cuando también sea importante (pero no de interés primario) analizar las propiedades del sistema. Aún cuando está claro el objetivo a perseguir dentro del problema de identificación, debe tomarse en cuenta las características del sistema de control, ya que estas pueden variar mucho dependiendo de su naturaleza, así por ejemplo es posible atacar problemas como: •. Diseño de un regulador que estabilice al sistema. Diseño de un controlador servo (para realizar transición óptima de un estado a otro). • Diseño de un regulador el cual minimice las variaciones en las variables del proceso debido a disturbios. •. En el presente trabajo, el problema de control está incluido en el tercer caso, ya que los controladores predictivos, caen dentro del campo de los controladores los cuales minimizan la varianza de una función formada por la salida del sistema y señales de control, basados en una función de costo previamente definida. Se debe entonces tener un modelo que incluya el sistema de vapor sobrecalentado, el cual se describió en el Capítulo 2. Se asume que el objetivo último del proceso de identificación es diseñar una estrategia de control óptima para el sistema de presión de vapor sobrecalentado de una Central Termoeléctrica de Ciclo Combinado (CTCC).. 18.
(34) Una vez que está claro el propósito de la identificación, es importante tener en cuenta que las técnicas de identificación fueron diseñadas para obtener un modelo confiable, con una cantidad de trabajo razonable. Para alcanzar este objetivo, es necesario plantear una estrategia a seguir y diseñar una metodología que conduzca con éxito al objetivo deseado. Lennart Ljung en [Ljung87] muestra una lista de tareas a seguir para alcanzar una identificación satisfactoria:. 1. Diseño del experimento: • Seleccionar señales dependientes a medir (salidas). • Seleccionar señales de entrada. • Seleccionar intervalo de muestreo. • Seleccionar la cantidad de muestras a tratar, N. 2. Elección del conjunto de modelos y estructura de estos: • Elección de la característica de los modelos (lineal, no lineal, etc.). • Elección del orden de los modelos. • Elección de la estructura (en caso de ser lineal e invariante en el tiempo): Funciones de transferencia. Orden del ruido presente en el sistema. 3. Elección del criterio de identificación: • Procedimiento numérico para encontrar los estimados. • Condiciones iniciales del método, etc. 4. Validación del modelo. • Seleccionar un procedimiento mediante el cual la validez de un cierto modelo sea evaluado.. Resulta entonces una lista de opciones y variables de diseño. Cada una de estas opciones va a tener influencia en la calidad del modelo resultante. El procedimiento de identificación tiene un flujo lógico natural: se obtienen datos, se escoge un conjunto de modelos y, se elige el mejor de ellos en función de los objetivos perseguidos. Es natural pensar que el primer modelo obtenido después de finalizar completamente el experimento no de resultados satisfactorios en la etapa de validación. Se debe entonces regresar y revisar los pasos dentro del procedimiento. El modelo puede no ser bueno debido a varias razones, debiéndose entonces corregir los posibles errores hasta lograr una identificación exitosa. El problema en su conjunto puede ser visto como un problema iterativo (ver figura 3.1). La figura 3.1 refleja el hecho de que aún cuando el problema es iterativo, el diseño del experimento, la elección de los modelos y los criterios para elección del modelo, tienen independencia en el contexto del escenario de pruebas. Si es necesario realizar una iteración más, no tienen que plantearse nuevamente todos los pasos del escenario de pruebas, sólo es necesario plantear los que se crea convenientes. Dentro de este proceso iterativo, la aplicación del método. 19.
(35) de identificación es necesaria siempre que el modelo no esté debidamente validado, únicamente cuando se tiene una validación satisfactoria en base a los criterios dados, se podrá decir que el experimento tuvo éxito. Conocimiento previo. Diseño del experimento. Datos. Escenario de pruebas Elección del conjunto de modelos Criterios de elección de un modelo. Aplicación del método. Modelo encontrado. Validación erronea: Revisar. Validación del Modelo. Validación exitosa: Usar el modelo. Figura 3.1.- Metodología de la estimación como un problema iterativo.. 3.2) Escenario de Pruebas 3.2.1) Proceso a Identificar.- Como fue descrito con anterioridad (Capítulo 1), una de las variable más importantes dentro de una CTCC es la presión de vapor sobrecalentado (PVR). La presión de vapor sobrecalentado, es controlada por la válvula de paso (XP) existente entre la línea de vapor sobrecalentado y el condensador. El sistema de control convencional está configurado como se muestra en el diagrama a bloques de la figura 3.2.. GVR. ref_pvr P. + G. -. Controlador (PI). sc_xp. PVR Planta. GVR = Flujo de vapor sobrecalentado PVR = Presión de vapor sobrecalentado ref_pvr = Referencia de vapor sobrecalentado sc_xp = Señal de control a la válvula de paso. Figura 3.2.- Diagrama a bloques del sistema de control convencional. 20.
(36) Sobre la línea de vapor sobrecalentado se tienen 2 medidores, de presión y de flujo (ver figura 2.5). La señal de presión es la variable a retroalimentar para obtener el error, dentro de un esquema clásico de control retroalimentado. Con la señal de flujo, con base en una curva característica (presión Vs. flujo), se fija la referencia de presión del vapor sobrecalentado (como se describió en el Capítulo 2). La acción de control se efectúa sobre la válvula de paso al condensador. Aunque se tiene un sistema claramente delimitado, el cual además es un sistema SISO (Single Input - Single Output), las variables del sistema están relacionadas y se ven afectadas por las variaciones en otras partes de la CTCC. El sistema a identificar es el que tiene como entrada la señal de control a la válvula de paso (SC_XP) y como salida PVR. A partir de ahora y para evitar ambigüedades, se llamará al sistema bajo prueba: proceso y al resultado de la identificación: modelo.. 3.2.2) Pruebas a Realizar.- Una vez establecidas tanto la variable de entrada como la de salida, es necesario establecer que tipo de pruebas se van a realizar, así como las señales necesarias de prueba, las cuales permitan obtener resultados satisfactorios. Los diferentes esquemas de identificación pueden ser clasificados con base a los elementos del problema, y cada esquema de identificación marca el tipo de pruebas a realizar. De esta forma, se puede pensar en esquemas los cuales exigen hacer una colección de n datos, para posteriormente procesar todos los datos al mismo tiempo; éste es un esquema de los llamados en lote. Por otra parte, cuando se utilizan esquemas iterativos, en algunos casos es suficiente realizar todos los cálculos fuera de línea, mientras que otros problemas pueden necesitar que los resultados sean obtenidos en línea [Åström71]. Los experimentos fuera de línea, son realizados generalmente cuando únicamente se desea caracterizar al sistema para tener un conocimiento más completo de su estructura y propiedades. Los experimentos en línea deben ser hechos siempre que se intenta resolver un problema de control auto-ajustable, ya que la identificación forma parte del propio algoritmo de control (ver Capítulo 1). Cuando se hace identificación en línea, existen dos tipos de pruebas a realizar: experimentos en lazo abierto y en lazo cerrado. En los experimentos en lazo abierto, se debe tomar en cuenta que los datos a utilizar sean lo suficientemente informativos con respecto al modelo, a esta condición se le conoce como excitación persistente[Åström89]. La identificación en lazo abierto se realiza cuando el proceso no esté funcionando en forma continua y sea posible detenerlo para realizar pruebas, y cuando se hace la suposición de que u(t) (entrada al sistema) y e(t) (ruido presente en el sistema) son independientes y no están correlacionados. Cuando es necesario realizar identificación a plantas que son inherentemente inestables, o cuando la entrada depende de los disturbios con el proceso en operación normal, la identificación. 21.
(37) se realiza en lazo cerrado. Se debe tener cuidado con este tipo de prueba, ya que los resultados pueden ser erróneos con suma facilidad [Ljung87], o se puede identificar un proceso diferente al de interés [Åström71]. Con base en estas consideraciones se plantea el siguiente conjunto de pruebas: 1. Identificación fuera de línea.- Con esta prueba se pretende tener un conocimiento más exacto del sistema, el cual arroje una primera aproximación del modelo a utilizar, así como el descartar modelos los cuales no sean necesarios para los fines perseguidos. Esta prueba también se plantea debido al tiempo de computo, es más rápido obtener un conjunto de datos de entrada y salida, para después procesarlos fuera de línea. Aunque se esta trabajando mediante simulación, cada simulación de la planta en conjunto es lenta. 2. Identificación en línea (lazo abierto).- Una vez obtenido un conjunto reducido de modelos, estos serán probado en línea (inmersos en el proceso funcionando) con la finalidad de evaluar su desempeño y decidir cuál será el modelo a utilizar dentro de los esquemas de control predictivo (GPP y GPC).. 3.2.3) Señales de Prueba.- Dentro del esquema de identificación planteado, es necesario introducir una señal de perturbación a la entrada del sistema que, como ya se menciono, debe ser tal que sea persistentemente excitadora, de tal forma que un único conjunto de parámetros estimados resulten del proceso de estimación. Un conjunto de señales que son buenas candidatas para estimación recursiva son dadas a continuación [Wellstead91]: •. Onda Cuadrada.- Estas señales son fáciles de generar y pueden limitarse fácilmente en amplitud. Hay que tener cuidado con la selección del periodo de la señal cuadrada para poder excitar todos los modos del sistema, una regla heurística dice que el periodo T, debe ser aproximadamente seis veces la constante de tiempo más significativa del sistema. O la frecuencia de la señal debe ser aproximadamente 0.16 del ancho de banda del sistema[Wellstead91].. •. Ruido uniformemente distribuido.- No son difíciles de generar si se aprovechan las funciones de generación de números aleatorios de casi todos los lenguajes de programación existentes, aunque el problema principal es la presencia de muy bajas frecuencias las cuales pueden causar distorsiones si el sistema tiene zonas muertas no lineales.. •. Ruido gausiano.- Este tipo de señal no es recomendada como señal de prueba en situaciones prácticas, normalmente es necesario filtrar esta señal para producir una señal que sí pueda ser usada para propósitos de identificación.. •. Secuencia Binaria Pseudo-Aleatoria (PRBS por sus siglas en inglés).- Estas son señales muy usadas en el campo de identificación de sistemas dinámicos. No es difícil generarlas y además tienen un espectro de frecuencia muy rico.. 22.
(38) La señal elegida no debe perturbar demasiado al sistema, esto es debido a que el método de identificación se basa en la suposición de que el sistema está operando en una región lineal y es invariante en el tiempo. Esta suposición tendrá mayor validez en cuanto menos se aleje el sistema de su punto de operación nominal. En [Alvarez83] se encuentran las características que debe tener la señal de entrada al sistema ( u(t) ): • Ser centrada para que perturbe muy poco al proceso. • Ser determinística para que se pueda generar fácilmente, aunque se considerará como aleatoria. • Ser binaria. • Ser periódica de manera que su autocorrelación se pueda calcular fácilmente. Estas características las llenan completamente las secuencias pseudoaleatorias, por lo que éstas serán las señales de prueba a utilizar.. binarias. 3.3) Pruebas de Respuesta al Escalón y Tiempo de Muestreo 3.3.1) Respuesta al Escalón.- Con la finalidad de seleccionar el intervalo de muestreo, así como de tener una idea aproximada de la dinámica del sistema, se hizo uso de una de las pruebas más comunes en el diseño de sistemas de control, la respuesta al escalón. En el caso de una CTCC, la planta puede tener una gran diversidad de puntos de operación, trayendo esto como consecuencia que se tenga una gama muy amplia de puntos en los cuales es posible linealizar la planta para diseñar un sistema de control. Desde este punto de vista, existen en realidad todo un conjunto de procesos, los cuales además de ser completamente factibles de presentarse, lo son también de controlarse. Toda la teoría desarrollada para obtener los métodos de estimación recursiva, recae en la fuerte suposición de que tanto las señales presentes en el proceso, así como el proceso mismo son lineales; esto es condicionalmente cierto en el rango de operación que sea importante para la aplicación auto-ajustable. Cuando se utiliza algún método de identificación, usualmente se intenta identificar los coeficientes de una representación aproximada lineal. Únicamente hay que tener cuidado en que la señal de excitación u(t) no sea lo suficientemente grande en amplitud de tal forma que lleve al sistema fuera del rango normal de operación (como fue mencionado al seleccionar la señal de prueba). Cuando la aplicación auto-ajustable se implementa en el modelo de la CTCC, el cual además de ser un proceso no-lineal, puede estar en diversos puntos de operación, maneja estos hechos de la siguiente forma[Wellstead91]: •. El estimador recursivo debe ser configurado para seguir los cambios en los parámetros estimados durante un cambio en el punto de operación. Dentro de este esquema, un cambio. 23.
(39) en el punto de operación de un sistema no lineal es tratado como un cambio en el valor de los parámetros de un sistema lineal. Las técnicas para seguir estos cambios son las que usan los factores de olvido. De esta forma, puede asegurarse que el esquema de identificación va a funcionar en los diversos puntos de operación del proceso.. Se realizaron tres pruebas al escalón, observando la respuesta del proceso en: 1) Carga base (TG a 55 Mw y TV a 32 Mw). 2) Carga intermedia (TG a 35 Mw y TV a 17.5 Mw). 3) Carga mínima (TG a 20 Mw y TV a 10 Mw). Las tres pruebas fueron realizadas sobre el punto de operación estable del proceso, abriéndose o cerrándose la válvula de paso (XP) sobre el valor que tenga en dicho punto de operación, con el sistema en lazo abierto. En la figura 3.3 (a), (b) y (c) se muestran las respuestas en carga base, carga intermedia y carga mínima respectivamente.. 4620. 3300 Se cierra XP. 4580. 3200. Se cierra XP. 3100. 4540. 3000 4500. 2900. 4460. 2800 Se abre XP. 4420. Se abre XP. 2700 2600. 4380 0. 100. 200. 300. 400. 500. 600. 700. 800. 0. 100. 200. 300. (a). 400. 500. 600. 700. (b). 3400 3250 3100 2950 2800. Se cierra XP. 2650 2500 2350 2200 2050. Se abre XP. 0. 100. 200. 300. 400. 500. 600. 700. 800. (c). 24. 800.
(40) Figura 3.3.- Respuesta del proceso al escalón. (a) Carga base, (b) carga intermedia, (c) carga mínima.. De la figura 3.3, puede observarse que estando en el mismo punto de operación y aún cuando la válvula se abre o se cierra en el mismo porcentaje, la respuesta no es simétrica, reflejando este hecho la no linealidad del proceso. Puede también notarse que la respuesta es diferente (ya sea al abrir o cerrar la válvula) en cada punto de operación, pudiendo interpretarse este hecho como cambios en el orden del modelo. Resultados obtenidos:. Carga base Se cierra XP Se abre XP XP inicial (% de apertura) 0.013509 XP final (% de apertura) 0.000509 0.026 PVR inicial (KPa) 4483.1298 Tiempo de retardo (s) 25 25 Tiempo de subida (s) 20 20 Tiempo de pico (s) 50 80 Máximo sobreimpulso (KPa) 4600 4385 Tiempo de establecimiento 350 350 (s). Carga intermedia Se cierra XP Se abre XP 0.102845 0.05 0.2 3005.8515 20 40 20 35 40 110 3280 2630 300 400. Carga mínima Se cierra XP Se abre XP 0.146509 0.028 0.28 2559.609375 30 25 20 60 40 120 3220 2060 200 200. Tabla 3.1.- Características de la respuesta al escalón del proceso a diferentes puntos de operación, ver [Ogata80] para definiciones.. 3.3.2) Intervalo de Muestreo.- No existen reglas completamente determinísticas para seleccionar en intervalo de muestreo en aplicaciones de control auto-ajustable. Sin embargo, como ocurre en diversas ocasiones en la teoría de control, existen guías heurísticas que pueden auxiliar en la selección apropiada. Teniendo una idea de la respuesta al escalón del sistema, es entonces razonable usar un modelo discreto en el tiempo el cual (en el dominio del tiempo continuo) entregue al menos cuatro puntos dentro del tiempo de subida de la respuesta transitoria del sistema [Wellstead91]. Ts ≥. Tr 4. (3.1). Dentro del dominio de la frecuencia, si se conoce el ancho de banda del sistema, se puede capturar toda la información dentro de este límite, seleccionando entonces una frecuencia de muestreo al menos 4 veces más grande. Nótese que se cumple el teorema de muestreo, el cual dice que para poder capturar la información más significativa de una señal, es necesario muestrear a una frecuencia que sea al menos el doble de su frecuencia más alta.. 25.
(41) Estas reglas dadas no son más que una guía para la selección del intervalo de muestreo, durante la estimación recursiva e incluso en aplicaciones de control auto-ajustable, el intervalo de muestreo pude ser cambiado en línea con la finalidad de obtener el mejor resultado. Con base en estas consideraciones y las figuras mostradas de la respuesta al escalón, se elige un tiempo de muestreo de 1 segundo. Este es el mismo tiempo de muestreo que tienen todos los controladores dentro del simulador de la CTCC, que fue sobre el cual se hicieron todas las pruebas. Eligiendo este periodo de muestreo, se asegura que las dinámicas principales del proceso son consideradas y al mismo tiempo, permite elegir una secuencia binaria con una longitud razonable para lograr una buena identificación. 3.3.3) Relación entre la Señal de Prueba, Respuesta el Escalón e Intervalo de Muestreo.Con base en el análisis mostrado, puede observarse que la mayor parte de la dinámica en las pruebas de escalón se encuentra dentro de los primeros 400 segundos. Es necesario entonces establecer la longitud de la PRBS, así como el número de muestras a considerar para el proceso de estimación fuera de línea. La decisión a tomar sobre la PRBS está relacionada con la frecuencia del reloj que la genera, y es suficiente con igualar el ancho de banda del proceso a ser estimado. Es decir, debemos hacer que la longitud de la PRBS esté contenida en su totalidad dentro del ancho de banda del proceso. La longitud de la secuencia no es de mayor importancia, aunque se recomienda en la literatura longitudes mayores a 63. Para realizar las pruebas en este caso de estudio, se hará uso de una secuencia de longitud 1023 para todas las pruebas de identificación, la cual puede ser generada a partir de un registro binario de longitud 10, y para realizar la validación, se usará una secuencia de longitud 2047 la cual se genera con un registro de longitud 111. Para realizar la estimación, se consideraran 700 datos para ser procesados, esto asegura una velocidad razonable para las diferentes pruebas, además de que utilizando 700 datos de la PRBS, puede considerarse como una señal no - periódica.. 3.4) Elección del Conjunto de Modelos La elección de la estructura y orden del modelo es una de las más importantes decisiones dentro de la formulación del problema de identificación. En principio existen 2 diferentes caminos. 1. Si se tiene un registro binario de orden n, con una retroalimentación que es una función booleana F(x1, x2, ... , xn), el problema consiste en encontrar el circuito correspondiente a la función F que genere una secuencia de longitud máxima. La función más usada es la suma módulo 2 de ciertos dígitos xi del registro. Para una longitud máxima de 1023, se retroalimentan los dígitos 7 y 10 del registro binario. Para una longitud máxima de 2047, se retroalimentan los dígitos 9 y 11 del registro binario. 26.
(42) para obtener el orden del modelo a utilizar: utilizando conocimiento previo o experimentando sobre el proceso; el mayor beneficio se obtiene al combinar ambas aproximaciones. 3.4.1) Estructura de los Modelos .- El desarrollo de los métodos de estimación recursiva a utilizar ( -RLS y UDU- en el Apéndice A se muestra la deducción de los algoritmos), se realiza con base en un modelo paramétrico del proceso, el cual además es lineal e invariante en el tiempo, y puede ser descrito como una función de transferencia en el dominio de z, o en una forma canónica:. Ay(t) = B u(t-1) + D v(t) + D(t) + C e(t). (3.2). donde: u(t) = secuencia de entrada (generalmente de control). y(t) = secuencia de salida. v(t) = fuente medible de ruido. D(t) = ruido móvil (drift disturbance). e(t) = ruido blanco. con: A(z-1) = 1 + a1 z −1 +K+a n a z − na. (3.2a). B(z ) = b0 + b1 z +K +bnb z D(z-1) = d0 + d1 z −1 +K +d nd z − nd D(t) = d 0 + d1 t +K + d n d t nd. (3.2b) (3.2c) (3.2d). C(z-1) = 1 + c1 z −1 +K+ cnc z − nc. (3.2e). -1. −1. − nb. Por lo tanto dentro de esta estructura, se debe decidir cuáles de los componentes de la ecuación 3.2 están presentes. • En primer lugar, se está tratando un problema de control (específicamente de regulación), por lo tanto el término que involucra la señal de control debe estar presente. • Como el proceso, es una simulación hecha por computadora, el sistema en si es determinístico, aun si tomamos en cuenta los errores introducidos por la longitud finita de la representación numérica, se tienen niveles de ruido muy pequeños, por lo que el orden del polinomio C pude ser considerado 0 o a lo máximo 1. El error de redondeo en computadoras digitales puede ser modelado como un proceso aleatorio de ruido blanco, teniendo una densidad de probabilidad uniforme en ciertos limites y varianza conocida [Franklin90]. • Por las mismas consideraciones que el inciso anterior, se asume que: D = 0, no hay una fuente de ruido externa que sea posible medir.. 27.
Figure




+7



Documento similar
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
(1886-1887) encajarían bien en una antología de textos históricos. Sólo que para él la literatura es la que debe influir en la historia y no a la inversa, pues la verdad litera- ria
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
En este sentido, puede defenderse que, si la Administración está habilitada normativamente para actuar en una determinada materia mediante actuaciones formales, ejerciendo
