Aplicaciones de control implementadas en microcontroladores
69
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electrónica y Telecomunicaciones. TRABAJO DE DIPLOMA Aplicaciones de control implementadas en microcontroladores Autora: Yudisleidy Ruiz Rios [email protected]. Tutores: DrC. Carlos Bazán Prieto [email protected]. Msc. Yunier Valeriano Medina [email protected]. Santa Clara 2014 "Año 56 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la carrera de Ingeniería en Telecomunicaciones, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO Conserva lo que tienes, olvida lo que te duele, lucha por lo que quieres, valora lo que posees, perdona a los que te hieren y disfruta a los que te aman. Nos pasamos la vida esperando que pase algo y lo único que pasa es la vida. No entendemos el valor de los momentos hasta que se han convertido en recuerdos, por eso haz lo que quieras hacer antes que se convierta en lo que te hubiese gustado haber hecho. No hagas de tu vida un borrador, tal vez no tengas tiempo de pasarlo en limpio. Nunca es tarde para empezar a ser felices. Bob Marley.
(5) ii. DEDICATORIA A mi papá, que deseó este momento tanto como yo, y hoy que lo logré no está conmigo físicamente para disfrutarlo juntos. Se lo dedico con todo mi corazón por ser el motivo de inspiración más grande de mi vida, porque siempre quiso tener una hija ingeniera y ahora donde quiera que esté puede ver coronado uno de sus mayores sueños. A mi mamá, que ha sido todo en mi vida. Con su sacrificio, preocupación, paciencia y amor ha sabido darme siempre todo y cuanto ha podido..
(6) iii. AGRADECIMIENTOS A Estrella, mi madre, que a pesar de estar sola y triste por mi ausencia siempre me dio fuerzas para continuar, porque desde el día que desgraciadamente nos tocó enfrentarnos a la realidad supo encontrar en cada problema una solución, en cada tristeza, un momento de comprensión y alegría para animarme el rostro. Porque aun cuando las cosas se hacían un poco difíciles hacía lo posible para que yo no lo notara. Por darme siempre todo lo que quise, por ser su niña mimada, por ser mi mejor amiga. A Roberto, mi padre, porque por él cada día me levantaba con ganas de hacer realidad este sueño. A Pancho, Mary (quien para mí siempre estará presente), Marta, Legón, mi familia de Sancti Spíritus, por todo el amor y el apoyo brindado durante la mayor parte de mi carrera, muy en especial a Migueli, por hacerme parte de ella, y porque sus cosas malas las convertí en experiencias y las buenas en hermosos recuerdos. A mis hermanas y a mis a mis tías, porque al tenerlas a ellas cerca de mi madre estaba más tranquila en la universidad. A Valeriano, mi tutor de Automática, porque sin su colaboración nunca lo hubiera logrado. Por recibirme como una más de sus estudiantes, por dedicarme todo el tiempo que necesité para apropiarme de sus conocimientos, pero por sobre todas las cosas por ser un ejemplo de profesional y una persona maravillosa. A Bazán, mi tutor, por su ayuda durante esta investigación. A El Piti, por su ayuda desinteresada que fue super importante en esta investigación. A Lianet, Lili, Allen y Roberto, mis amigos de estudios y de fiestas, porque sin ustedes todo hubiera sido un poco más difícil. Por vencer juntos cada prueba, por.
(7) iv. apoyarme en los momentos de tristezas, por compartir juntos cada alegría, por ser una especial compañía para cada fiesta y por aceptarme tal y como soy. A todos los profesores y estudiantes del 117, porque aquel que no aportó su granito en esta investigación hizo que la vida en estos cortos meses fuera un poco más grata. A Aniel, mi primer amigo de la universidad, porque cuando existe el afecto no importa que los lazos de amistad se separen un poco, porque el día que lo necesites sabrás que podrás contar con él. A mis profesores, pero muy en especial a esos con los que a diario nos podemos sentar a hablar de cualquier tema, esos a los que cuando saludamos no solo lo hacemos con unos buenos días, sino que por ser excelentes personas casi llegaron a formar parte de nuestras amistades. A Aisha y Yango, mis amigos extranjeros, por hacerme parte de sus vidas, porque a su lado siempre me sentí muy feliz, aun en los momentos más tristes. Por todo lo que me brindaron que aunque para ellos parezca nada para mí era bien importante. A Jorgito, Vitico, Félix, personas especiales, que en un momento llegaron para siempre a mi vida y supieron brindarme lo mejor de sí para que yo alcanzara todas mis metas. A los que integran el grupo de la Salst, por ser únicos y verdaderamente especiales. A mis compañeros de grupo, a todos sin excepciones, porque junto a ellos pasé momentos que voy a recordar toda la vida. A los que aquí no menciono y forman parte de mi vida. A todos, aunque parezca poco: Gracias.
(8) v. RESUMEN. En las asignaturas de Microprocesadores, que se imparten en la carrera de Telecomunicaciones y Electrónica, se realizan tareas de investigación relacionadas con aplicaciones reales. En el mundo industrializado de hoy, se exige cada vez más, de procesos eficientes con un alto grado automatización. En la carrera estos estudiantes no reciben asignaturas relacionadas con la teoría del control, de ahí la importancia de disponer de una bibliografía detallada y resumida que aborde los principales contenidos de control digital, de una manera sencilla. En este trabajo se implementan algoritmos sencillos de control digital en microcontroladores, a partir de realizar el ajuste del controlador PID digital mediante la regla de Ziegler-Nichols. Los controladores implementados en esta investigación aseguran el funcionamiento estable de los sistemas para los cuales han sido diseñados. Los resultados obtenidos al simular los sistemas de control en el software Proteus así lo demuestran. Las aplicaciones han sido concebidas con componentes de bajo costo para su posterior aplicabilidad en las tareas y laboratorios de la asignatura de Microprocesadores..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA ...................................................................................................................... ii AGRADECIMIENTOS ......................................................................................................... iii RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 4 CAPÍTULO 1.. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SISTEMAS. DE CONTROL Y SU APLICACIÓN. ................................................................................... 6 1.1. Definiciones básicas de los sistemas de control ....................................................... 6. 1.2. Elementos de un sistema de control ......................................................................... 7. 1.3. Representación matemática de plantas y procesos................................................... 9. 1.4. Controladores ......................................................................................................... 10. 1.4.1. Controlador proporcional ................................................................................ 11. 1.4.2. Controlador proporcional-integral .................................................................. 12. 1.4.3. Controlador proporcional-derivativo .............................................................. 12. 1.4.4. Controlador proporcional-integral-derivativo................................................. 13. 1.4.5. Principales características de los controladores digitales ............................... 13. 1.5. Ajuste de controladores PID .................................................................................. 15.
(10) vii 1.5.1. Método de sintonía de Ziegler-Nichols ........................................................... 16. 1.5.2. Método de López y otros ................................................................................ 16. 1.5.3. Método de Rovira y Murrill ............................................................................ 17. 1.6. Aplicaciones comerciales utilizadas en el control ................................................. 17. 1.7. Consideraciones finales .......................................................................................... 22. CAPÍTULO 2.. ASTECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN. PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES. ............................................................................................. 23 2.1. Análisis de desempeño de los sistemas de control ................................................. 23. 2.2. Procedimiento para la sintonía de un controlador mediante la regla de Ziegler-. Nichols .............................................................................................................................. 27 2.3. Algoritmo de programación para la implementación del sistema de control en el. microcontrolador ............................................................................................................... 31 2.4. Características de la herramienta de diseño y simulación Proteus ......................... 34. 2.5. Consideraciones finales .......................................................................................... 36. CAPÍTULO 3.. LA IMPLEMENTACIÓN DE LAS APLICACIONES DE CONTROL. EN EL MICROCONTROLADOR PIC16F877A................................................................. 38 3.1. Descripción general de las aplicaciones ................................................................. 38. 3.2. Sistema térmico ...................................................................................................... 39. 3.3. Sistema eléctrico .................................................................................................... 43. 3.4. Implementación en Matlab del sistema de control para el ciruito RC ................... 46. 3.5. Consideraciones finales .......................................................................................... 47. CONCLUSIONES Y RECOMENDACIONES ................................................................... 48 Conclusiones ..................................................................................................................... 48 Recomendaciones ............................................................................................................. 49.
(11) viii REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 50 ANEXOS .............................................................................................................................. 52 Anexo I Anexo II. Programación en microcontroladores de un controlador PID digital ............ 52 Programación en el PIC16F877A de un controlador PID digital para el. control de un sistema térmico ........................................................................................... 55 Anexo III. Programación en el PIC16F877A de un controlador PID digital para el. control de un sistema eléctrico.......................................................................................... 57.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. En el mundo industrializado se exigen cada vez procesos más eficientes, más rápidos, más económicos y que proporcionen productos de mejor calidad. Esto se ha conseguido con el desarrollo constante de nuevas tecnologías que son mejoradas o sustituidas por otras. De ahí la importancia que tiene el control de los procesos mediante dispositivos y sistemas adecuados, lo cual ha convertido a los sistemas de control en una temática necesaria y fundamental en los estudios de ingeniería actuales. En años recientes, el control automático ha desempeñado una función vital en el avance de la ingeniería y la ciencia. Además de su extrema importancia en los sistemas de vehículos espaciales, de guiado de misiles, robóticos y similares; el control automático se ha vuelto una parte importante e integral de los procesos modernos industriales y de manufactura. Por ejemplo, el control automático es esencial en el control numérico de las máquinasherramienta de las industrias de manufactura (Arraiga and Merino, 2009), en el diseño de sistemas de pilotos automáticos en la industria marítima y aeroespacial (Martínez, 2009, Valeriano-Medina et al., 2013), y en el diseño y construcción de vehículos en la industria automotriz (Kiencke and Nielsen, 2005). El control automático también se utiliza en aquellas operaciones industriales donde resulta necesario controlar variables como la presión (Eizaga et al., 2009),la temperatura (Méndez et al., 2012), y el nivel (Blanco et al., 2010). Los avances en la teoría y la práctica del control automático aportan los medios para obtener un desempeño óptimo de los sistemas dinámicos, mejorar la productividad, aligerar la carga de muchas operaciones manuales repetitivas y rutinarias, así como de otras actividades. Debido a estos beneficios casi todos los ingenieros y científicos deben tener un buen conocimiento de este campo (Ogata, 1998)..
(13) INTRODUCCIÓN. 2. Los microcontroladores están siendo utilizados con mucha frecuencia para desarrollar las aplicaciones de control (Rolle, 2006, Martínez et al., 2013, Instruments, 2013), esto se debe a que las nuevas unidades de cómputo disponibles en el mercado son cada vez más potentes y tienen precios asequibles, que permiten su utilización para el control en tiempo real de distintos tipos de variables asociadas a plantas y procesos industriales. Los controladores PID constituyen el algoritmo de control que más se utiliza a nivel mundial (Heong et al., 2005). En la mayoría de los casos su implementación se realiza en microcontroladores, aprovechando la incorporación de lenguajes de alto nivel que facilitan el proceso de programación, la distribución de software de desarrollo gratuito y la disponibilidad de amplia información científica relacionada con la temática (Ruge, 2009). Para dominar las novedosas tecnologías que ha creado el hombre se necesita de una preparación integral. Por tal motivo, en las principales escuelas de ingenierías y universidades de alrededor del mundo se imparte una docencia con un alto componente práctico que permite ejercitar los conocimientos teóricos. El colectivo de profesores que imparte la asignatura de Microprocesadores, en la carrera de Telecomunicaciones y Electrónica que se estudia en la Universidad Central Martha Abreu de Las Villas, ha estudiado. distintos. tipos. de. aplicaciones. para. que. sean. implementadas. en. microcontroladores por los estudiantes durante los laboratorios y tareas que se desarrollan en esta asignatura. Sin embargo, aún no se cuenta con los conocimientos teóricos que posibiliten la implementación en microcontroladores de aplicaciones de control como parte de la asignatura. De ahí que se plantee el siguiente problema científico para esta investigación: No se dispone de los conocimientos teóricos necesarios que les permita a los estudiantes de la carrera de Telecomunicaciones y Electrónica implementar algoritmos de control sencillos en microcontroladores, durante la realización de los laboratorios y tareas pertenecientes a la asignatura de Microprocesadores. Una vez realizada la revisión bibliográfica, cuyos resultados se presentan en el Capítulo I, se plantea la siguiente hipótesis: Si se ajustan controladores digitales PID utilizando el método propuesto por ZieglerNichols, se podrían implementar varias aplicaciones de control en microcontroladores que.
(14) INTRODUCCIÓN. 3. serían de mucha utilidad para la realización de tareas investigativas y laboratorios en la asignatura de Microprocesadores. Con esta investigación se pretende cumplir los siguientes objetivos: Objetivo general: Implementar algoritmos sencillos de control digital en microcontroladores. Objetivos específicos: Estudiar los fundamentos teóricos relacionados con los sistemas de control y determinar los algoritmos de control digital que se puedan aplicar en las Telecomunicaciones y la Electrónica. Ajustar los controladores PID utilizando las reglas propuestas por Ziegler-Nichols. Programar el algoritmo de control PID digital e implementarlo en el microcontrolador PIC. Desarrollar aplicaciones con microcontroladores que utilicen el algoritmo de control PID digital, empleando para ello la herramienta de simulación Proteus. Para cumplimentar los objetivos antes mencionados se establecieron las siguientes tareas de investigación: 1. Revisión de la literatura especializada en la temática relacionada con los algoritmos de control. 2. Análisis de las propuestas de algoritmos de control que se aplican en las Telecomunicaciones y la Electrónica. 3. Estudio de los métodos que se utilizan para ajustar los algoritmos de control digital. 4. Definición de la estructura matemática del controlador a ajustar. 5. Cálculo de los parámetros necesarios para realizar el ajuste. 6. Programación del algoritmo del control PID en el microcontrolador PIC16F877A. 7. Ajuste del controlador digital PID para cada aplicación. 8. Implementación en el software Proteus de las aplicaciones donde se use el algoritmo de control seleccionado para esta investigación..
(15) INTRODUCCIÓN. 4. 9. Evaluación del desempeño de las aplicaciones de control mediante simulación. 10. Elaboración de un informe científico que contenga los principales resultados obtenidos en esta investigación, así como los fundamentos teóricos que los respaldan. El principal aporte de este trabajo radica, en que se proponen y ajustan aplicaciones de control implementadas en un microcontrolador tipo PIC, que por su sencillez, pueden ser utilizadas para desarrollar prácticas de laboratorios y tareas investigativas en las asignaturas de Microprocesadores que se estudian como parte de la carrera de Telecomunicaciones y Electrónica. Las aplicaciones de control cuentan con el respaldo teórico necesario para que puedan ser comprendidas por aquellos especialistas que no tienen a la automática como centro de su atención. Organización del informe La investigación incluye tres capítulos, además de las conclusiones, recomendaciones, referencias bibliográficas y anexos correspondientes. Los temas que se abordan en cada capítulo se encuentran estructurados de la forma siguiente: Capítulo I: en este capítulo se abordan las definiciones básicas de los sistemas de control, así como los elementos que lo conforman. Se explican los pasos a seguir para obtener la representación matemática de las plantas y los procesos. A partir del análisis de la literatura consultada, se abordan las principales características de algunos de los controladores industriales que existen y varios de los métodos utilizados para su ajuste. Finalmente se presentan varias aplicaciones, donde se emplean controladores digitales implementados en distintas unidades de cómputo. Capítulo II: comienza abordando como se analiza el desempeño de los sistemas de control a partir de determinar los parámetros que caracterizan sus respuestas. Se realiza una descripción detallada del procedimiento de ajuste propuesto por Ziegler y Nichols. Además, se aborda la programación de un algoritmo de control en un microcontrolador PIC para utilizarlo en el desarrollo de aplicaciones de control. Por último, se dan a conocer las principales herramientas con que cuenta el software Proteus, donde se implementan y simulan las aplicaciones que se presentan en esta investigación..
(16) INTRODUCCIÓN. 5. Capítulo III: en este capítulo se detallan los pasos seguidos para la implementan de dos aplicaciones de control, una para un sistema térmico y otra para un circuito RC. Primeramente se presentan los valores numéricos de los controladores digitales PID derivados del proceso de ajuste y luego se evalúan los resultados obtenidos al simular las implementaciones realizadas..
(17) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 6. SU APLICACIÓN.. CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SISTEMAS DE CONTROL Y SU APLICACIÓN.. En este capítulo se incursiona en los aspectos principales relativos a los sistemas de control. Se plantea el marco teórico de la tesis sobre la base de la revisión bibliográfica realizada. Finalmente se presentan varias aplicaciones, donde se emplean controladores digitales, que sirven de base a los ejemplos que se presentan en esta investigación. 1.1. Definiciones básicas de los sistemas de control. El primer trabajo significativo en control automático fue el regulador de velocidad centrífugo de James Watt para el control de la velocidad de una máquina de vapor, en el siglo XVIII. Minorsky, Hazen y Nyquist, entre muchos otros, aportaron trabajos importantes en las etapas iniciales del desarrollo de la teoría de control (Ogata, 1998). Conforme las plantas modernas con muchas entradas y salidas se vuelven cada vez más complejas, la descripción de un sistema de control moderno requiere de una gran cantidad de ecuaciones. La teoría de control moderna, está basada en el análisis en el dominio del tiempo y la síntesis a partir de variables de estados. Desde alrededor de 1960, la disponibilidad de las computadoras digitales hizo posible el análisis en el dominio del tiempo de sistemas complejos. A partir de entonces la teoría de control moderna se ha desarrollado para enfrentar la creciente complejidad de las plantas y los requerimientos relacionados con la precisión, el peso y el costo en aplicaciones militares, espaciales e industriales. Durante los años comprendidos entre 1960 y 1980, se investigaron a fondo el control óptimo (Anderson and Moore, 1989) y el control adaptable (Gómez and Mendoza, 2009,.
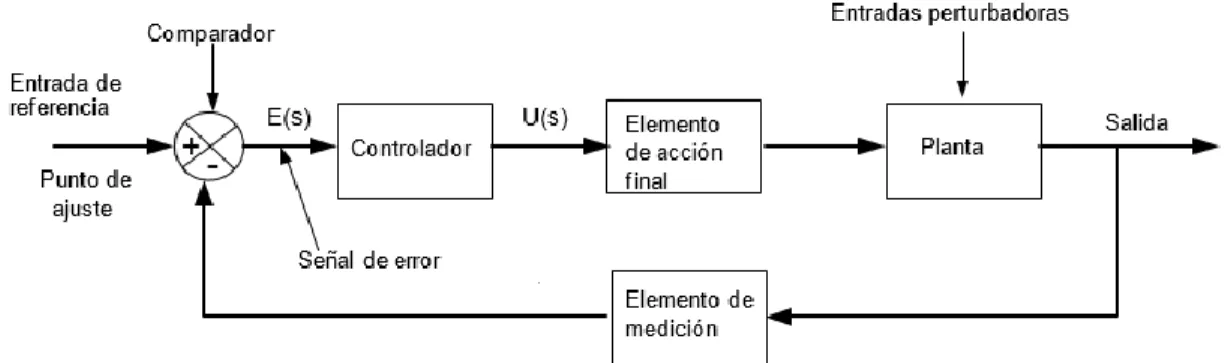
(18) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 7. SU APLICACIÓN.. Regalón et al., 2012), mediante el aprendizaje de sistemas complejos. De 1980 a la fecha, los descubrimientos en la teoría de control moderna se centraron en el control robusto (Regalón et al., 2012), el control H∞ (Hirwa et al., 2012), y temas asociados. Ahora que los dispositivos electrónicos se han vuelto más baratos y más compactos, se usan como parte integral de los sistemas de control. Las aplicaciones recientes de la teoría de control moderna incluyen sistemas ajenos a la ingeniería, como los biológicos, biomédicos, económicos y socioeconómicos (Ogata, 1998). 1.2. Elementos de un sistema de control. En la Figura 1.1 se presenta el esquema de un sistema de control típico. A partir del esquema es posible definir un conjunto de conceptos que son esenciales para comprender el funcionamiento de un sistema de control.. Figura 1.1 Sistema de control en lazo cerrado. Sistemas de control en lazo abierto. En estos sistemas la salida no afecta la acción de control. Es decir que en este tipo de control no se mide la salida ni se realimenta para compararla con la entrada. Por lo tanto, a cada entrada de referencia le corresponde una condición operativa fija; lo que obliga a que la precisión del sistema sea dependiente de la calibración del mismo. Sistema de control en lazo cerrado. Los sistemas de control en lazo cerrado (como el que se muestra en la Figura 1.1) alimentan al controlador con la señal de error, que es la diferencia entre la señal de entrada y la señal de realimentación, a fin de reducir el error y llevar la salida del sistema a un valor deseado. El término control de lazo cerrado siempre implica el uso de una acción de control realimentada para reducir el error del sistema; es.
(19) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 8. SU APLICACIÓN.. por eso que el término control de lazo realimentado y de lazo cerrado se usan indistintamente (Ogata, 1998). A continuación se definen todos los componentes del sistema de control en lazo cerrado (Ogata, 1998, Kuo, 1996): Planta. La planta es un conjunto de partes que trabajan juntas con el objetivo de realizar una operación en particular. Se le llama planta a cualquier sistema físico que se desea controlar, recibe como entrada la acción de control y produce la salida. Normalmente su comportamiento solo es modificable a través de las señales de entrada. Proceso. El proceso es cualquier operación que va a ser controlada. Entradas. Las entradas pueden ser entradas de referencia o entradas perturbadoras. Estas señales son consideradas dentro del lazo señales de tipo causa. Una perturbación es una señal que normalmente afecta a la variable controlada del sistema. Las perturbaciones pueden ser internas cuando surgen dentro del sistema, o externas porque se producen fuera del sistema y actúan como otra entrada. Salidas. Las salidas son consideradas señales de tipo efecto. Elemento de acción final. El elemento de acción final, también conocido como actuador, es un dispositivo de potencia que transforma la señal de control en una acción que puede ser interpretada por la planta. Genéricamente se conoce con el nombre de actuadores a los elementos finales que permiten modificar las variables a controlar en una instalación automatizada. Se trata de elementos que ejercen de interfaces de potencia, convirtiendo magnitudes físicas, normalmente de carácter eléctrico en otro tipo de magnitud que permite actuar sobre el medio o proceso a controlar. Al mismo tiempo aíslan la parte de control del sistema de las cargas que gobiernan el proceso. Entre los accionamientos más habituales se encuentran los destinados a producir movimiento (motores y cilindros), los destinados al trasiego de fluidos (bombas y válvulas) y los de tipo térmico (hornos, intercambiadores, etc.). Elemento de medición. El sensor-transductor o elemento de medición es un dispositivo que convierte la variable de salida en otra variable adecuada, como un desplazamiento,.
(20) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 9. SU APLICACIÓN.. presión, o voltaje, que se utiliza para comparar la salida con la señal de entrada de referencia. Existe una gran cantidad de sensores en el mercado, para poder medir magnitudes físicas, de los que se pueden enumerar los siguientes: temperatura, presión, posición, movimiento y velocidad. La temperatura es una de las variables que con mayor frecuencia se mide en la industria de proceso; una razón simple es que casi todos los fenómenos físicos se ven afectados por esta. La temperatura se utiliza frecuentemente para inferir otras variables del proceso; dos de los ejemplos más comunes son las columnas de destilación y los reactores químicos. Comúnmente, en las columnas de destilación se utiliza la temperatura para inferir la pureza de una de las corrientes existentes; en los reactores químicos la temperatura se utiliza como un indicador de la extensión de la conversión o reacción. Controlador. Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina la desviación y produce una señal de control que reducirá la desviación a cero o a un valor pequeño. La manera en la cual el controlador automático produce la señal de control se denomina acción de control. Los diferentes tipos de controladores y sus características se abordarán más adelante en este capítulo. 1.3. Representación matemática de plantas y procesos. Al estudiar los sistemas de control, se debe ser capaz de modelar sistemas dinámicos y analizar las características de los mismos. Una representación matemática de un sistema dinámico se define como un conjunto de ecuaciones que representan la dinámica del sistema. Téngase presente que una representación matemática no es única para un sistema determinado. Un sistema puede representarse en muchas formas diferentes, dependiendo de cada perspectiva. La dinámica de muchos sistemas, ya sean mecánicos, eléctricos, térmicos, económicos, biológicos, etc., se describe en términos de ecuaciones diferenciales. Dichas ecuaciones diferenciales se obtienen a partir de leyes físicas que gobiernan un sistema determinado, como las leyes de Newton para sistemas mecánicos y las leyes de Kirchoff para sistemas eléctricos. Debemos siempre recordar que obtener una representación matemática razonable.
(21) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 10. SU APLICACIÓN.. es la parte más importante de todo el análisis. Por ejemplo, en algunos casos, es provechoso usar representaciones en el espacio de estados. En cambio, en otros, la representación mediante la función de transferencia puede ser más conveniente que cualquier otra. Atendiendo a que en esta investigación se con trabaja sistemas de dinámica sencilla, la representación matemática a utilizar será la función de transferencia, la cual se define como el cociente entre la transformada de Laplace de la salida y la transformada de Laplace de la entrada bajo la suposición de que todas las condiciones iniciales son cero. 𝐹𝑢𝑛𝑐𝑖ó𝑛 𝑑𝑒 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎 = 𝐺(𝑠) =. ℒ(𝑠𝑎𝑙𝑖𝑑𝑎) | ℒ(𝑒𝑛𝑡𝑟𝑎𝑑𝑎) 𝑐𝑜𝑛𝑑𝑖𝑐𝑖𝑜𝑛𝑒𝑠 𝑖𝑛𝑖𝑐𝑖𝑎𝑙𝑒𝑠 𝑐𝑒𝑟𝑜. (1.1). A partir del concepto de función de transferencia, es posible representar la dinámica de un sistema mediante ecuaciones algebraicas en el campo s. Si la potencia más alta de s en el denominador de la función de transferencia es igual a n, el sistema se denomina sistema de n-ésimo orden. Normalmente se realiza el modelado de un sistema y el proceso de identificación experimental del mismo. Lo ideal es obtener el modelo matemático y el de identificación experimental, cuando ambos convergen, o sea, los resultados de cada uno por separado son similares, entonces la tarea está completada. En caso de no coincidir se perfeccionan o corrigen ambos por separado y se van evaluando los resultados hasta que coincidan. En caso de que no coincidan nunca, se utiliza el modelo resultante de la identificación experimental porque es el que ofrece los datos reales del sistema. Si bien el matemático se obtiene a partir de leyes físicas y fórmulas, el de identificación se logra poniendo a operar el sistema sin perturbaciones e introduciéndole entradas que lo exciten, pero que no lo saturen. Se puede modelar tanto para obtener una función de transferencia, como para llegar a un modelo en espacio de estado. 1.4. Controladores. Los controladores, se pueden clasificar de acuerdo con sus acciones de control, de la siguiente forma (Ogata, 1998): 1. Controladores de dos posiciones o intermitentes (encendido-apagado).
(22) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 11. SU APLICACIÓN.. 2. Controladores proporcionales (P) 3. Controladores proporcionales-integrales (PI) 4. Controladores proporcionales-derivativos (PD) 5. Controladores proporcional-integral-derivativo (PID). La mayoría de los controladores industriales pueden clasificarse según el tipo de potencia que utilizan en su operación, como neumáticos, hidráulicos o electrónicos. La clase de controlador a usar se decide en base a la naturaleza de la planta y las condiciones de operación, incluyendo consideraciones tales como seguridad, costo, disponibilidad, confiabilidad, exactitud, peso y tamaño. Las funciones de transferencia de los principales controladores continuos, se encuentran resumidas en las siguientes ecuaciones: Proporcional. 𝑈(𝑠) = 𝐾𝑝 𝐸(𝑠). (1.2). Proporcional-Integral. 𝑈(𝑠) 1 = 𝐾𝑝 (1 + ) 𝐸(𝑠) 𝑇𝑖 𝑠. (1.3). Proporcional-Derivativo. 𝑈(𝑠) = 𝐾𝑝 + 𝑠𝐾𝑝 𝑇𝑑 𝐸(𝑠). (1.4). Proporcional-Integral-Derivativo. 𝑈(𝑠) 1 = 𝐾𝑝 (1 + + 𝑇𝑑 𝑠) 𝐸(𝑠) 𝑇𝑖 𝑠. (1.5). 1.4.1 Controlador proporcional Para un controlador con acción de control proporcional, la relación entre la salida del controlador 𝑢(𝑡) y la señal de error 𝑒(𝑡) es: 𝑢(𝑡) = 𝐾𝑝 𝑒(𝑡). (1.6). donde 𝐾𝑝 se denomina ganancia proporcional. No importando el mecanismo y la potencia que lo alimenta, el controlador proporcional es esencialmente un amplificador con ganancia.
(23) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 12. SU APLICACIÓN.. ajustable, con el inconveniente de que su acción de control produce una desviación del valor en estado estacionario, ya que nunca llegará por más que se aumente 𝐾𝑝 al valor de la referencia. El error de estado estacionario, es el que puede observarse cuando la planta ha estabilizado y su valor no es igual al de la referencia. 1.4.2 Controlador proporcional-integral Este controlador se define mediante: 𝐾𝑝 𝑡 𝑢(𝑡) = 𝐾𝑝 𝑒(𝑡) + ∫ 𝑒(𝑡)𝑑𝑡 𝑇𝑖 0. (1.7). donde 𝑇𝑖 se denomina tiempo integral y es quien ajusta la acción integral. Con un control proporcional, es necesario que exista error para tener una acción de control distinta de cero. Con acción integral, un error pequeño positivo siempre resulta en una acción de control creciente, y si el error es negativo la señal de control será decreciente. Este razonamiento sencillo muestra que el error en régimen permanente será siempre cero, lo cual constituye la principal ventaja que asegura este tipo de controlador. 1.4.3 Controlador proporcional-derivativo El controlador PD se define mediante: 𝑢(𝑡) = 𝐾𝑝 𝑒(𝑡) + 𝐾𝑝 𝑇𝑑. 𝑑𝑒(𝑡) 𝑑𝑡. (1.8). donde 𝑇𝑑 es una constante denominada tiempo derivativo. La acción derivativa tiene carácter de previsión, lo que hace más rápida la acción de control, aunque tiene la desventaja importante que amplifica las señales de ruido y puede provocar saturación en el actuador. La acción de control derivativa nunca se utiliza por sí sola, debido a que sólo es eficaz durante períodos transitorios. Cuando una acción de control derivativa se agrega a un controlador proporcional, permite obtener un controlador de alta sensibilidad, es decir que responde a la velocidad del cambio del error y produce una corrección significativa antes de que la magnitud del error se.
(24) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 13. SU APLICACIÓN.. vuelva demasiado grande. Aunque el control derivativo no afecta en forma directa al error en estado estacionario, añade amortiguamiento al sistema y, por tanto, permite un valor más grande de ganancia, lo cual provoca una mejora en la precisión en estado estacionario. 1.4.4 Controlador proporcional-integral-derivativo Este controlador reúne las ventajas de cada una de las tres acciones de control individuales. La ecuación de un controlador con esta acción combinada se obtiene mediante: 𝑢(𝑡) = 𝐾𝑝 𝑒(𝑡) +. 𝐾𝑝 𝑑𝑒(𝑡) ∫ 𝑒(𝑡)𝑑𝑡 + 𝐾𝑝 𝑇𝑑 𝑇𝑖 𝑑𝑡. (1.9). 1.4.5 Principales características de los controladores digitales El diseño de sistemas de control en tiempo discreto es similar en principio al diseño de sistemas de control en tiempo continuo. El objetivo del diseño es básicamente, determinar el controlador para que el sistema tenga un desempeño de acuerdo a especificaciones deseadas para la respuesta. De hecho, en la mayoría de las situaciones, el proceso controlado es el mismo, excepto que en sistemas en tiempo discreto el controlador está diseñado para procesar datos digitales o muestreados. Tal como en el diseño de sistemas de control en tiempo continuo, el diseño de sistemas en tiempo discreto puede llevarse a cabo ya sea en el dominio de la frecuencia, o en el dominio del tiempo (Kuo, 1996). La mayoría de las personas aprenden como diseñar sistemas en tiempo continuo antes que digitales. Por tanto no es sorpresa que la mayoría de los ingenieros prefieran diseñar sistemas en tiempo continuo en vez de sistemas de control digital. Si el diseñador intenta utilizar control digital, el sistema debería ser diseñado para que las dinámicas del controlador pudiesen ser descritas por una función de transferencia en el campo z o por ecuaciones en diferencias. Sin embargo, existen situaciones bajo las cuales el controlador analógico ya está diseñado, pero la disponibilidad y ventajas del control digital sugieren que el controlador sea implementado por elementos digitales (Kuo, 1996). El controlador PID en el dominio en tiempo continuo se describe mediante la ecuación 1.9. A partir de esa expresión, es posible representar la estructura de un controlador PID.
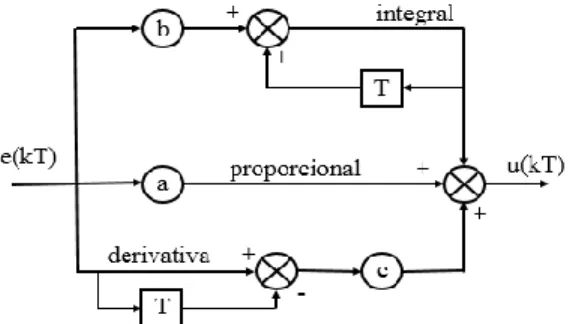
(25) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 14. SU APLICACIÓN.. discreto mediante la forma posicional. Esta función de transferencia se presenta a continuación (Ogata, 1996): 𝑈(𝑧) 𝐾𝐼 = 𝐾𝑃 + + 𝐾𝐷 (1 − 𝑧 −1 ) 𝐸(𝑧) 1 − 𝑧 −1. (1.10). 𝐾𝑝 𝑇 𝐾𝐼 = 𝐾𝑝 − = 𝑎 = 𝑔𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑝𝑟𝑜𝑝𝑜𝑟𝑐𝑖𝑜𝑛𝑎𝑙 2𝑇𝑖 2. (1.11). donde 𝐾𝑃 = 𝐾𝑝 −. 𝐾𝑝 𝑇 = 𝑏 = 𝑔𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑙 𝑇𝑖. (1.12). 𝐾𝑝 𝑇𝑑 = 𝑐 = 𝑔𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑑𝑒𝑟𝑖𝑣𝑎𝑡𝑖𝑣𝑎 𝑇. (1.13). 𝐾𝐼 =. 𝐾𝐷 =. Existen distintas posibilidades para la realización práctica de un controlador PID digital. En la Figura 1.2 se presenta el esquema derivado de la ecuación 1.10 que es el que se utilizará en esta investigación.. Figura 1.2 Controlador PID digital. En la Figura 1.3 se muestra un esquema genérico para un sistema de control digital.. Figura 1.3 Sistema de control digital.
(26) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 15. SU APLICACIÓN.. Para describir el funcionamiento de este sistema, es válido decir que en un muestreador convencional, un interruptor se cierra cada período de muestreo T para admitir una señal de entrada. En la práctica, la duración del muestreo es muy corta en comparación con la constante de tiempo más significativa de la planta, normalmente se elige como un décimo de la constante más pequeña. Un muestreador convierte una señal en tiempo continuo en un tren de pulsos que se presenta en los instantes de muestreo t=0, T, 2T,… (Ogata, 1996). Estos impulsos no pueden aplicarse directamente a la entrada de un sistema continuo ya que este trataría de responder y tendría una acción intermitente, produciéndose oscilaciones continuas. Por lo que se necesitan dispositivos para reconstruir la señal. Estos dispositivos se denominan circuitos de retención de datos. Si el circuito de retención de datos es un extrapolador polinomial de n-ésimo orden, se conoce como retenedor de nésimo orden. Debido a que un retenedor de alto orden utiliza las muestras anteriores para extrapolar una señal en tiempo continuo entre el instante de muestreo presente y el siguiente, la exactitud en la aproximación de la señal en tiempo continuo se mejora a medida que el número de muestras anteriores utilizadas se incrementa. Sin embargo, esta mejoría en exactitud se obtiene a costa de un tiempo de retardo mayor. En sistemas de control en lazo cerrado, cualquier tiempo de retardo adicional en el lazo afectará la estabilidad del sistema y en algunos casos podría causar la inestabilidad del mismo. El retenedor de datos más sencillo se obtiene cuando n=0, dicho retenedor de datos se conoce como retenedor de orden cero. 1.5. Ajuste de controladores PID. Desde que se tuvo la idea de cerrar el lazo de control e introducir un controlador en alguna parte del mismo han sido numerosos los investigadores que han trabajado con el objetivo de lograr el método de sintonización más idóneo. Cuando se realiza el ajuste se trata de lograr que el sistema responda, cumpliendo requisitos establecidos de antemano, en estado transitorio o estable. La gran variedad de controladores que existen ha propiciado el surgimiento de un número elevado de métodos que son utilizados en la sintonización. El sistema de control tiene dos posibles condiciones de operación: Servomecanismos, para la cual se requiere un buen seguimiento del valor deseado..
(27) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 16. SU APLICACIÓN.. Regulador, donde lo importante es la insensibilidad a las perturbaciones. La práctica ha demostrado que un lazo de control sintonizado como servomecanismo no funciona de la mejor manera como regulador y que el desempeño de uno sintonizado como regulador a su vez no es satisfactorio como servomecanismo. El primer método de sintonía que surgió fue el propuesto por Ziegler y Nichols, el mismo será el utilizado para esta investigación dado que es sencillo de aplicar y asegura buenos resultados en plantas de poca complejidad. Sin embargo, es importante abordar una panorámica de otras formas de sintonías que son ampliamente utilizadas. A continuación se exponen las principales características que distinguen a un pequeño grupo de métodos de ajuste de controladores de los tantos que existen en la actualidad. 1.5.1 Método de sintonía de Ziegler-Nichols Ziegler y Nichols tuvieron como propósito examinar la acción de los tres efectos principales del control, Proporcional (P), Proporcional-Integrativo (PI) y ProporcionalIntegrativo-Derivativo (PID), asignarle valores prácticos y ofrecer un método que permitiera obtener de una manera rápida y sencilla los ajustes óptimos de cada efecto del control. El criterio de desempeño seleccionado por los autores de este método consiste en obtener respuestas transitorias con un cuarto de razón de decrecimiento. Este parámetro no es más que la razón entre una oscilación y la que le precedió (Valeriano-Medina, 2009). Para su estudio las reglas de sintonización propuestas por Ziegler y Nichols se dividen en dos variantes: oscilaciones sostenidas y curva de reacción. En relación a la variante de oscilaciones sostenidas sus ajustes se basan en la última información del sistema, obtenida utilizando solamente la acción proporcional. Para el caso de curva de reacción los autores obtuvieron este tipo de respuesta ante entrada paso, de donde encontraron las relaciones para sus fórmulas de ajustes. 1.5.2 Método de López y otros Debido a que los parámetros de ajuste de los criterios que persiguen razón de decrecimiento un cuarto no son únicos, se crearon métodos donde las especificaciones de la respuesta fueran un error o desviación mínima de la variable controlada. El método presentado por.
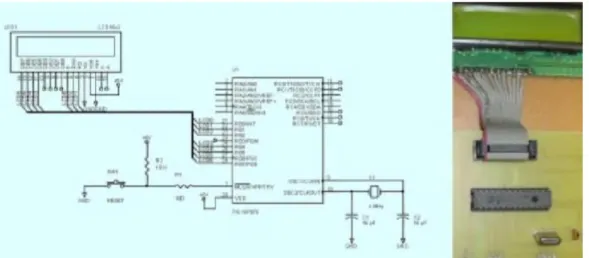
(28) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 17. SU APLICACIÓN.. López fue el primero basado en criterios integrales con ecuaciones para el cálculo de los parámetros del controlador. Estos autores desarrollaron sus fórmulas de manera empírica en base a la suposición de que la función de transferencia del proceso para entrada perturbadora es idéntica a la función de transferencia para la señal de salida del controlador. Los criterios de desempeño utilizados fueron: Integral del error absoluto (IAE), Integral del error absoluto por el tiempo (ITAE) e Integral del error cuadrático (ISE). La optimización de los criterios de desempeño de este método está basada en el mejor modelo de primer orden más retardo que se pueda obtener con un controlador PID-Ideal (Valeriano-Medina, 2009). 1.5.3 Método de Rovira y Murrill Estos autores siguiendo el trabajo realizado por López para el ajuste de controladores en lazo abierto, presentaron el primer método basado en criterios integrales para el cálculo de los parámetros del controlador que opera como servomecanismo. Las especificaciones de diseño utilizadas por Rovira fueron: la Integral del error absoluto (IAE), Integral del error absoluto por el tiempo (ITAE). No tuvieron en cuenta el criterio (ISE) por su naturaleza altamente oscilatoria. Estas reglas son empíricas, están basadas en un modelo de primer orden más retardo y fueron propuestas para un PID-Ideal (Valeriano-Medina, 2009). 1.6. Aplicaciones comerciales utilizadas en el control. Con el desarrollo de la electrónica y el aumento de la capacidad de cómputo que existe en la actualidad, ha dejado de ser un problema implementar distintos algoritmos matemáticos para conseguir controlar los más variados sistemas. Los controladores tipo PID marchan a la vanguardia en cuanto a su utilización en equipos comerciales como son los microcontroladores, los Controladores Lógicos Programables (PLC por sus siglas en inglés) y las computadoras. En este epígrafe se exponen algunos ejemplos que permiten ilustrar el auge y desarrollo del que están gozando en la actualidad estos dispositivos. La implementación de controladores PID digitales en un microcontrolador PIC se propone como un ejemplo de aplicación de bajo costo (Rolle, 2006). Se trata de ajustar un controlador tipo PID utilizando el método propuesto por Ziegler-Nichols para usarlo en el.
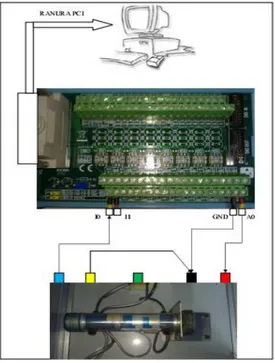
(29) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 18. SU APLICACIÓN.. control de un sistema de calefacción. Una vez ajustado el controlador se implementa en un PIC16F876. Esta aplicación dispone de un teclado mediante el cual se introducen los parámetros del controlador y de un display LCD que ofrece toda la información necesaria para un correcto funcionamiento del dispositivo realizado. En la Figura 1.4 y 1.5 respectivamente se presenta el esquema de conexiones lógicas correspondientes al teclado y al display LCD del controlador PID implementado.. Figura 1.4 Esquema de conexiones correspondientes al bloque del teclado. Figura 1.5 Esquema de conexiones correspondientes al bloque del display LCD. Otra de las aplicaciones donde se utiliza un controlador PID tiene como propósito controlar la posición de un motor de corriente directa (Rodríguez, 2011). En la Figura 1.6 se aprecian los elementos que son necesarios para lograr el control de la posición del motor. La medición analógica obtenida se convierte en señales digitales mediante el empleo de la.
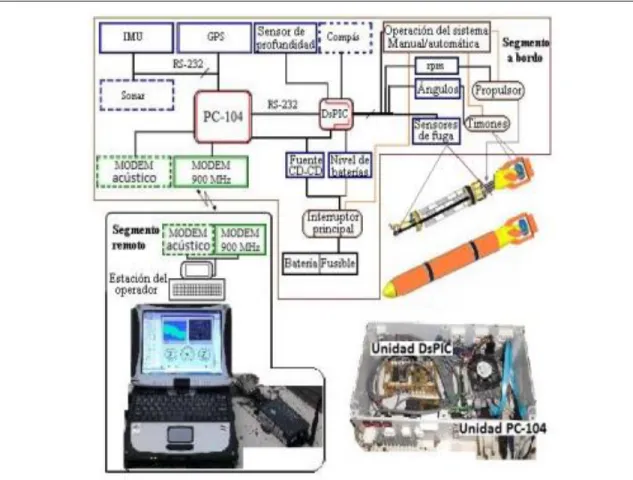
(30) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 19. SU APLICACIÓN.. tarjeta PCLAB 1711. De esta manera se posibilita la implementación de un controlador tipo PID en la computadora con el cual se pueda realizar el control de la posición del motor. El ajuste del control se realiza utilizando la técnica propuesta por Ziegler-Nichols. La utilización de esta arquitectura encarece la aplicación.. Figura 1.6 Esquema del sistema de control de posición de un motor de corriente directa. En el Departamento de Automática perteneciente a la Universidad Central Martha Abreu de Las Villas se desarrolla el proyecto HRC-AUV, que tiene como propósito diseñar un piloto automático que asegure el cumplimiento de misiones de manera autónoma para un vehículo subacuático. Para ello se emplea la arquitectura que se presenta en la Figura 1.7, la cual está compuesta por dos unidades de cómputo. Las unidades de cómputo son: una computadora industrial PC-104 modelo “PCM-3362” de la firma Advantech y un sistema empotrado diseñado por GARP basado en dos DsPIC 33FJ64 de la firma Microchip. En la Unidad DsPIC se manejan todas las mediciones analógicas relacionadas con: profundidad, ángulo de timones, parámetros de propulsión, nivel de baterías y sensores de fugas. En esta unidad se ejecutan los algoritmos de control de rumbo y profundidad del AUV (Autonomous Underwater Vehicles) utilizando controladores PID (Martínez et al., 2013)..
(31) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 20. SU APLICACIÓN.. Figura 1.7 Arquitectura de hardware del HRC - AUV. Un Autómata Programable es una microcomputadora de propósitos específicos, especialmente diseñada para el control industrial y adquisición de datos donde se mezclan elementos de cómputo (lenguaje de programación, interfaces hombre - máquina, unidades de memoria, etc.) y elementos de control (regulación PID, procesamiento analógico, señalización, mando, temporización y conteo, etc.) integrados en un mismo equipo, para cumplir las funciones de automatización de procesos en tiempo real con elevada fiabilidad y seguridad (Mateo de la Cruz, 2011). El PLC por sus características especiales de diseño tiene un campo de aplicación muy extenso. La continua evolución del hardware y el software amplía constantemente este campo para poder satisfacer, en el espectro de sus posibilidades reales, las necesidades que se presentan. Un PLC Telematique, modelo TSX Micro3721001, se usa para controlar cuatro variables de un proceso (temperatura, presión, nivel y velocidad). Para ello se utilizan los algoritmos.
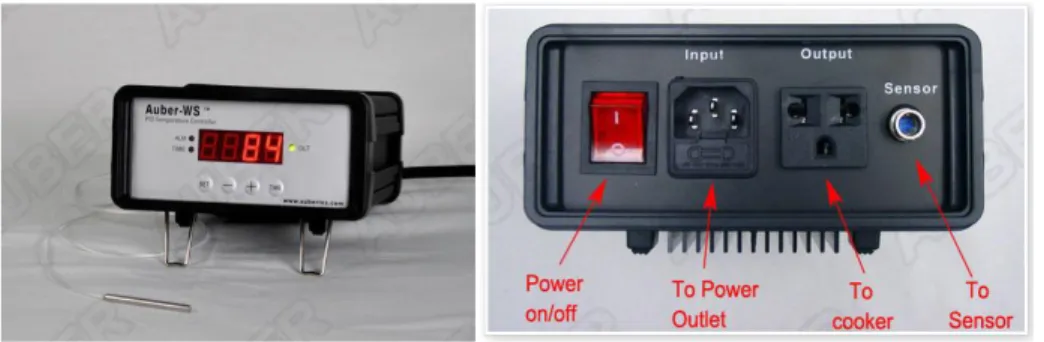
(32) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 21. SU APLICACIÓN.. de control tipo PID que vienen implementados en el dispositivo. El propósito final de esta aplicación tiene que ver con la realización de prácticas por parte de los estudiantes que complemente los conocimientos recibidos en distintas asignaturas (Mesa, 2004). En la Figura 1.8 se presenta una foto del PLC Telematique TSX Micro.. Figura 1.8 PLC TSX Micro. En la Figura 1.9 se observa la implementación en un equipo comercial de un controlador tipo PID que por un lado tiene una entrada para conectar un sensor térmico, y por otro lado un enchufe estándar al que se conecta el elemento calentador. Es decir, el calentador se conecta al controlador en vez de directamente a la toma de corriente, y en función de la lectura del sensor, el controlador es el que regula la potencia que suministra al calentador (Instruments, 2013).. Figura 1.9 Vista frontal y trasera del controlador PID de temperatura Auber WS-1500ES.
(33) CAPÍTULO 1. ESTUDIO SOBRE LAS CARACTERÍSTICAS DE LOS SITEMAS DE CONTROL Y. 22. SU APLICACIÓN.. 1.7. Consideraciones finales. Los microcontroladores se han convertido en dispositivos ampliamente utilizados en la actualidad en aplicaciones electrónicas, biomédicas y de control. Específicamente en el campo del control, la implementación en microcontroladores de distintos tipos de algoritmos de control, ha contribuido a darle solución a un numeroso grupo de problemáticas de carácter práctico que se presentan cotidianamente en la industria. Para aprovechar al máximo las potencialidades que brindan los algoritmos de control resulta necesario dominar la base teórica relacionada con los sistemas de control. Existen diferentes algoritmos de control cuya utilización depende del tipo de aplicación que se trate y de los requisitos de desempeño que se deseen alcanzar. Sin embargo, atendiendo a la simplicidad de su estructura y a los excelentes resultados que aseguran en aplicaciones muy diversas, los controladores PID continúan predominando a nivel mundial. Para su ajuste se han desarrollado distintos tipos de técnicas, pero en aquellos casos donde no sea necesario una exactitud extrema puede continuar utilizándose el procedimiento original propuesto por Ziegler y Nichols. Con esta investigación se pretende programar un controlador tipo PID en un microcontrolador PIC para que pueda utilizarse como una aplicación en la carrera de Telecomunicaciones y Electrónica para controlar distintas plantas. Los valores de los parámetros del controlador se calcularían con el criterio de Ziegler-Nichols a partir de las características dinámicas de las plantas. Como complemento, se abordan los principales aspectos teóricos relacionados con los sistemas de control que aseguran el adecuado entendimiento por parte de los estudiantes y brindan la posibilidad de realizar tareas y trabajos investigativos a partir de la propuesta de solución que se propone en este trabajo..
(34) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 23. CAPÍTULO 2. ASTECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. El trabajo con los sistemas de control se divide fundamentalmente en tres etapas: el proceso de ajuste, la implementación y la evaluación del desempeño. De la calidad del ajuste depende en gran medida el desempeño del sistema de control. Por eso este proceso tiene que realizarse en función de las características de la planta que se desea controlar y debe contar con un respaldo matemático que asegure exactitud en los resultados. La manera en que se implementa un sistema de control está dada por el tipo de aplicación que se trate, por los recursos con que se cuente y por los requisitos de desempeño que se establezcan. Un paso importante de la implementación lo constituye la simulación del sistema de control, es en este momento donde se perfecciona el ajuste o se decide remplazar un elemento del lazo por otro. Una vez que el sistema de control funcione adecuadamente se analiza su desempeño mediante simulación, en términos a las características que presente la variable que se controla. En este capítulo se presentan los aspectos teóricos y las herramientas de programación y simulación que son necesarias para ajustar, implementar y evaluar el desempeño de distintos sistemas de control basados en microcontroladores. 2.1. Análisis de desempeño de los sistemas de control. Ya que el tiempo es la variable independiente empleada en la mayoría de los sistemas de control, es usualmente de interés evaluar las respuestas de la salida con respecto al tiempo,.
(35) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 24. o simplemente, la respuesta en el tiempo. Si el objetivo de control es hacer que la variable de salida siga a la señal de entrada, a partir de algún tiempo inicial y algunas condiciones iniciales, es necesario comparar la entrada y la respuesta a la salida como funciones del tiempo. Por tanto, en la mayoría de los sistemas de control, la evaluación final del desempeño de un sistema se basa en las repuestas en el tiempo. La respuesta en el tiempo de un sistema de control se divide normalmente en dos partes: la respuesta transitoria y la respuesta en estado estable. En sistemas de control, la respuesta transitoria está definida como la parte de la respuesta en el tiempo que tiende a cero cuando el tiempo tiende a infinito. La respuesta en estado estable es la parte de la respuesta que aparece después que la transitoria ha desaparecido (Ogata, 1998). Todos los sistemas de control estables presentan una etapa transitoria antes de alcanzar el estado estable. La respuesta transitoria de un sistema de control es necesariamente importante, ya que es una parte significativa del comportamiento dinámico del sistema; y la diferencia entre la salida y la entrada o respuesta deseada se debe controlar cuidadosamente antes de alcanzar el estado estable. El estudio de un sistema de control en el dominio del tiempo involucra esencialmente la evaluación de las respuestas transitorias y en estado estable del sistema. En el problema de diseño, las especificaciones se proporcionan normalmente en términos del desempeño transitorio y en estado estable, y los controladores se diseñan para que todas las especificaciones sean cumplidas por el sistema diseñado. Las entradas a muchos sistemas de control prácticos no se conocen con anticipación. En muchos casos, las entradas de un sistema de control pueden variar en forma aleatoria con respecto al tiempo. Es difícil diseñar un sistema de control que tenga un desempeño satisfactorio para todas las formas posibles de entrada. Para propósitos de análisis y diseño, es necesario suponer algunos tipos básicos de entradas de prueba para evaluar el desempeño de un sistema. A partir de la selección adecuada de estas señales de prueba básicas, no sólo se sistematiza el tratamiento matemático del problema, sino que la respuesta a este tipo de entradas permite la predicción del desempeño del sistema con otras entradas más complejas..
(36) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 25. Las señales de prueba típicas son (Kuo, 1996): Entrada función escalón Entrada función rampa Entrada función parabólica La entrada función escalón representa un cambio instantáneo en la entrada de referencia. Si un sistema de control es capaz de responder adecuadamente ante este tipo de entrada, también respondería de forma correcta ante otras. La representación matemática de una función escalón de magnitud A es: 𝑟(𝑡) = 𝐴𝑢(𝑡). (2.1). aplicando la transformada de Laplace se obtiene: 𝑅(𝑠) =. 𝐴 𝑠. (2.2). Para un sistema de control lineal, la caracterización de la respuesta transitoria frecuentemente se realiza utilizando como entrada una función escalón unitario 𝑢(𝑡). La respuesta de un sistema de control cuando la entrada es una función escalón unitario se conoce como respuesta al escalón unitario. La entrada escalón o paso es la que se utiliza para obtener las respuestas de los sistemas de control que se presentan en esta investigación. Si bien cuando los sistemas de control de segundo orden son raros en la práctica, su análisis generalmente ayuda a formar una base para el análisis del desempeño de sistemas de órdenes más altos, especialmente aquellos que pueden aproximarse mediante sistemas de segundo orden. La función de transferencia típica de un sistema de control de segundo orden es: 𝐶(𝑠) ω𝑛 2 = 2 𝑅(𝑠) 𝑠 + 2ξω𝑛 𝑠 + ω𝑛 2. (2.3). donde 𝐶(𝑠) representa la salida del sistema de control en lazo cerrado, 𝑅(𝑠) la entrada de referencia, ξ es el factor de amortiguamiento relativo del sistema y ω𝑛 la frecuencia natural no amortiguada (Kuo, 1996)..
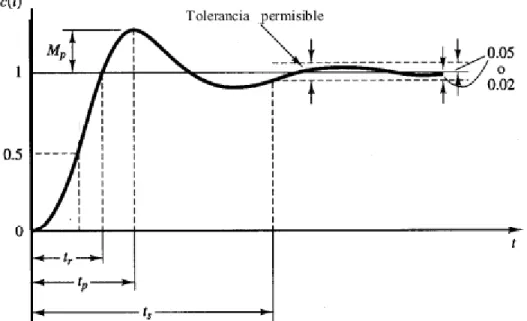
(37) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 26. El comportamiento dinámico de un sistema de segundo orden se describe en términos de los parámetros ξ y ω𝑛 . Si 0 < ξ < 1 el sistema se denomina subamortiguado y la respuesta transitoria es oscilatoria. Si ξ = 1, el sistema se denomina críticamente amortiguado. Los sistemas sobreamortiguados corresponden a ξ >1. La respuesta transitoria de los sistemas críticamente amortiguados y sobreamortiguados no oscila. Si ξ = 0, la respuesta transitoria no se amortigua (Ogata, 1998). Un sistema subamortiguado siempre llegará al valor final más rápido que uno críticamente amortiguado o uno sobreamortiguado, por lo que en la mayoría de los casos se desea que el comportamiento del sistema bajo estudio sea similar a uno subamortiguado. La Figura 2.1 muestra la curva de respuesta típica de un sistema subamortiguado ante una entrada tipo paso unitario por la referencia.. Figura 2.1 Respuesta típica de un sistema de segundo orden subamortiguado ante entrada paso unitario por la referencia. A continuación se definen un conjunto de parámetros característicos de este tipo de respuesta que suelen ser muy útiles para evaluar el comportamiento del desempeño del sistema de control (Ogata, 1998): Máximo sobreimpulso (𝑀𝑝 ): es el valor o pico máximo de la curva de respuesta, medido a partir de la unidad. Si el valor final en estado estable de la respuesta es diferente de la.
(38) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 27. unidad, es común usar el porcentaje de máximo sobreimpulso, que se define mediante la siguiente expresión:. 𝑀𝑝 =. 𝑐(𝑡𝑝 ) − 𝑐(∞) × 100% 𝑐(∞). (2.4). La cantidad de máximo sobreimpulso (en porciento) indica de manera directa la estabilidad relativa del sistema. Razón de decrecimiento (𝑅𝑑 ): es la razón de amplitud entre dos oscilaciones sucesivas. Para sistemas de segundo orden típico se puede calcular de la siguiente manera: 𝑅𝑑 = 𝑀𝑝 2. (2.5). Tiempo de establecimiento (𝑡𝑠 ): es el tiempo que se requiere para que la curva de respuesta alcance un rango alrededor del 2% o el 5% del valor final según se elija, y permanezca dentro de este. El tiempo de establecimiento se relaciona con la mayor constante de tiempo del sistema de control. Los objetivos del diseño del sistema en cuestión determinan cuál criterio de error en porcentaje usar. Tiempo de subida (𝑡𝑟 ): es el tiempo requerido para que la respuesta pase del 0 al 100% de su valor final. Tiempo pico (𝑡𝑝 ): es el tiempo requerido para que la respuesta alcance el primer pico del sobreimpulso. Error en estado estable (𝑒𝑠𝑠 ): es la diferencia entre la salida y la entrada de referencia en estado estable (Kuo, 1996). 2.2. Procedimiento para la sintonía de un controlador mediante la regla de ZieglerNichols. Conociendo el modelo matemático de la planta, es posible aplicar diversas técnicas de diseño con el fin de determinar los parámetros del controlador que cumplan con las especificaciones en estado transitorio y en estado estable del sistema en lazo cerrado. Sin embargo, si la planta es tan complicada que no es fácil obtener su modelo matemático, tampoco es posible un enfoque analítico para el diseño de un controlador PID. En este caso,.
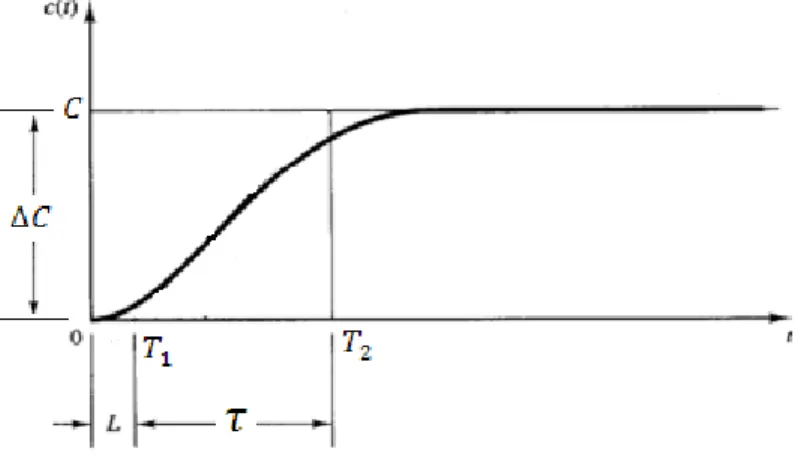
(39) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 28. debemos recurrir a los enfoques experimentales para la sintonización de los controladores PID. El proceso de seleccionar los parámetros del controlador que cumplan con las especificaciones de desempeño se conoce como sintonización del controlador. Ziegler y Nichols sugirieron reglas para sintonizar los controladores PID (lo cual significa calcular valores de 𝐾𝑝 , 𝑇𝑖 y 𝑇𝑑 ) con base en las respuestas escalón experimentales sin presencia de controlador alguno o, basadas en el valor de 𝐾𝑝 que se produce en el límite de estabilidad cuando sólo se usa la acción de control proporcional. En ambos se pretende obtener una razón de decrecimiento de un cuarto en la respuesta escalón, aunque teniendo en cuenta la relación que existe entre 𝑅𝑑 y 𝑀𝑝 , establecida por la ecuación 2.5, muchos autores prefieren utilizar al máximo sobreimpulso como parámetro para evaluar la calidad de las respuestas. Las reglas de Ziegler-Nichols, que se presentan a continuación, son muy convenientes cuando no se conocen los modelos matemáticos de las plantas aunque también pueden emplearse en aquellos casos en que los modelos matemáticos sean conocidos (Ogata, 1998). El método de oscilaciones sostenidas consiste en aumentarle la ganancia a un sistema bajo la acción del efecto proporcional hasta que la respuesta del mismo alcance oscilaciones sostenidas y guardar los valores de ganancia y período de oscilación que el sistema muestra en esas circunstancias. Este método utiliza la información última del sistema y pone a trabajar al sistema en la frontera de su estabilidad, lo que constituye un peligro en aplicaciones reales porque su comportamiento se puede volver inestable. Los sistemas a los que se le puede aplicar este método son aquellos de tercer orden en adelante (ValerianoMedina, 2009). El procedimiento de ajuste y las relaciones matemáticas para hallar los parámetros del controlador se pueden encontrar en el libro Ingeniería de Control Moderna (Ogata, 1998). Para utilizar la variante del método basada en la curva de reacción el sistema debe tener polos reales. Para este método los cambios se realizan a la salida del regulador, se aplica una entrada paso (ver Figura 2.2), se evalúan los resultados y a partir de estos se predicen los ajustes. La utilización de la curva de reacción del proceso se justifica porque con esta se obtiene una aceptable representación del sistema ahorrándose trabajos matemáticos engorrosos. Si bien ella no ofrece una información completa del proceso, al menos permite realizar una predicción aceptable de los ajustes del regulador (Valeriano-Medina, 2009). La.
(40) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 29. curva de reacción que utilizaron Ziegler y Nichols para la obtención de sus ajustes se muestra en la Figura 2.3.. Figura 2.2 Sistema de control al que se le aplica la prueba escalón. Figura 2.3 Curva de reacción utilizada por Ziegler y Nichols en sus pruebas. Si la planta no contiene integradores ni polos dominantes complejos conjugados, la curva de respuesta escalón unitario debe tener forma de S, como se observa en la Figura 2.3. Si la respuesta no exhibe una curva con forma de S, este método no es pertinente. La curva con forma de S se caracteriza por dos parámetros: el tiempo de retardo 𝐿 y la constante de tiempo τ. A partir de la curva de respuesta escalón obtenida, la función de transferencia de la planta 𝐺𝑝 (𝑠) se puede aproximar mediante un sistema de primer orden con retardo (PORT) del modo siguiente (Ogata, 1998): 𝐺(𝑠) =. 𝐾𝑒 −𝐿𝑠 𝜏𝑠 + 1. (2.6). donde los parámetros de la misma se calculan a partir de la curva de reacción utilizando las siguientes expresiones:.
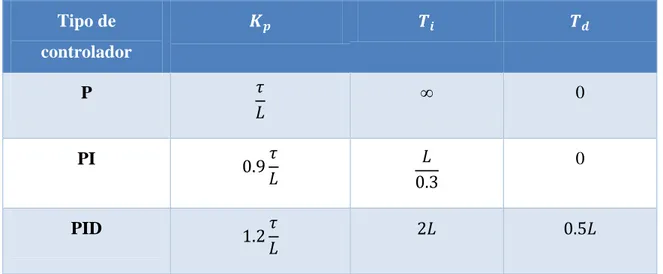
(41) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 𝐾=. ∆𝐶 ∆𝑈. 30. (2.7). 3 𝜏 = (𝑇2 − 𝑇1 ) 2. (2.8). 𝐿 = 𝑇2 − 𝜏. (2.9). ∆𝐶: variación de la salida del sistema ∆𝑈: variación de la amplitud de la función escalón que se aplica como entrada al sistema en lazo abierto. 𝑇1 : tiempo que demora la respuesta del sistema en alcanzar el 28,3% de su valor final 𝑇2 : tiempo que demora la respuesta del sistema en alcanzar el 63,2% de su valor final Ziegler y Nichols sugirieron calcular los valores de 𝐾𝑝 , 𝑇𝑖 y 𝑇𝑑 de acuerdo con las fórmulas que aparecen en la Tabla 2.1 (Ogata, 1998). Tabla 2.1 Regla de sintonización de Ziegler-Nichols basada en la curva de reacción. 𝑲𝒑. 𝑻𝒊. 𝑻𝒅. P. 𝜏 𝐿. ∞. 0. PI. 0.9. 𝜏 𝐿. 𝐿 0.3. 0. PID. 1.2. 𝜏 𝐿. 2𝐿. 0.5𝐿. Tipo de controlador. Estas ecuaciones, por lo general, proporcionan un primer juego de valores para los controladores que aseguran la estabilidad del sistema pero que no ofrecen la exactitud requerida. Por tal motivo, se debe realizar un reajuste posterior que asegure los índices de desempeño de las repuestas, previamente establecidos en función de las características que presente la planta que se desea controlar..
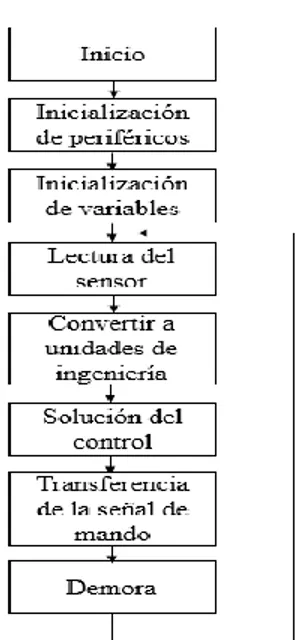
(42) CAPÍTULO 2. ASPECTOS TEÓRICOS Y HERRAMIENTAS DE SIMULACIÓN PARA EL AJUSTE E IMPLEMENTACIÓN DE SISTEMAS DE CONTROL EN MICROCONTROLADORES.. 2.3. 31. Algoritmo de programación para la implementación del sistema de control en el microcontrolador. Los controladores que se ajustan en esta investigación se implementan en el microcontrolador PIC16F877A (Microchip, 2003), que se muestra en la Figura 2.4. La selección está motivada por la disponibilidad de los subsistemas necesarios para la aplicación, así como la posibilidad de futuras implementaciones con teclado y display.. Figura 2.4 Microcontrolador PIC16F877A. La estructura del programa implementado en el microcontrolador se observa en la Figura 2.5 (Ruge, 2009).. Figura 2.5 Estructura del programa implementado en el microcontrolador.
Figure
+7
Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
El nuevo Decreto reforzaba el poder militar al asumir el Comandante General del Reino Tserclaes de Tilly todos los poderes –militar, político, económico y gubernativo–; ampliaba
quiero también a Liseo porque en mi alma hay lugar para amar a cuantos veo... tiene mi gusto sujeto, 320 sin que pueda la razón,.. ni mande
En suma, la búsqueda de la máxima expansión de la libertad de enseñanza y la eliminación del monopolio estatal para convertir a la educación en una función de la
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
D) El equipamiento constitucional para la recepción de las Comisiones Reguladoras: a) La estructura de la administración nacional, b) La su- prema autoridad administrativa
Esta nueva representaci´on se define a trav´es de la curvatura, es decir, una funci´on que explica cu´anto se curva la carretera.. Si se curva hacia la derecha la curvatura
