Estimación de estado WLS mediante una formulación de restricciones de igualdad
77
0
0
Texto completo
(2) Facultad de Ingeniería Eléctrica Departamento Electroenergético Trabajo de Diploma Título: “Estimación de estado WLS mediante una formulación de restricciones de igualdad” Autor: Dariel Trujillo Palmero. E-mail: [email protected] Tutor: Dr. José Ángel González Quintero. E-mail: [email protected] Tutor: Ing. Jesús Secades Miyar. E-mail: [email protected] Santa Clara 2016 “Año 58 de la Revolución ".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor. Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de información Científico-Técnica.
(4) Pensamiento. En la tierra hacen falta personas que trabajen más, que critiquen menos, que construyan más, que destruyan menos, que prometan menos y resuelvan más, que esperen recibir menos y dar más, que digan: mejor ahora y no mañana.. Ché.
(5) Dedicatoria. Dedico este trabajo a mi familia que a lo largo de la vida han sido mi fuente de inspiración en todo lo que hago..
(6) Agradecimientos Primeramente quisiera agradecerles a mis padres por apoyarme y guiarme en mi vida para siempre lograr mis objetivos. A mi hermano por su optimismo y por contagiarnos siempre con su alegría. A mis sobrinas por regalarme tantos momentos inolvidables con sus ocurrencias. A mi tío Arturo que con su singular ingenio me ha inspirado a ser un profesional. A toda mi familia en general por hacerme más fácil el camino. Un agradecimiento especial a mi novia por estar todos estos años en los buenos y malos momentos junto a mí cuando más la necesité. A mis compañeros de aula por siempre ayudarme en los estudios y poder ver todo más fácil. A todos los profesores que a lo largo de estos cinco años me formaron como profesional, en especial a mi tutor Pepe por haberme ayudado y aceptado en este compromiso. A la Revolución y en especial al Comandante en Jefe por permitirme realizar mis sueños de ser ingeniero. En general a todas las personas que de una forma u otra han contribuido a mi crecimiento tanto personal como profesional. A todos, GRACIAS..
(7) Tarea técnica . Realizar un estudio bibliográfico sobre técnicas alternativas al método WLS para la estimación de estado de sistemas eléctricos de potencia mediante restricciones de igualdad.. . Plantear el algoritmo seleccionado como técnica alternativa en la estimación de estado.. . Implementar el algoritmo seleccionado como técnica alternativa en la estimación de estado utilizando como herramienta el MATLAB.. . Validar el algoritmo analizado aplicándolo en diferentes casos concretos encontrados en la literatura.. Firma del Autor. Firma del Tutor.
(8) Resumen En este trabajo se realiza un estudio del comportamiento de la estimación de estado WLS en sistemas de potencia, mediante una formulación de restricciones de igualdad, abarcando sus dos versiones, lambda y rho. Estos determinan la magnitud de voltaje y ángulo a partir de un conjunto de mediciones. Para ello se realiza primeramente, una amplia búsqueda bibliográfica sobre el tema, para lograr un mejor conocimiento y entendimiento acerca del mismo. Posteriormente se pasa a plantear e implementar en lenguaje MatLab algoritmos y formulaciones que den solución al tema planteado. Una vez implementados los algoritmos se analiza un ejemplo sencillo con varias variantes, esto para alcanzar una mayor familiarización y entendimiento de la técnica estudiada. Finalmente se aplican los métodos implementados a diferentes sistemas de potencias de mayor complejidad encontrados en la literatura y se evidencia la eficacia de los mismos. Adicionalmente se recomienda hacia donde deben enfocarse los trabajos investigativos futuros..
(9) Índice Introducción ...................................................................................................................... 1 Capítulo 1. “Estudio del estado del arte” ........................................................................... 3 1.1 Introducción ............................................................................................................ 3 1.2 Método de los Mínimos Cuadrados Ponderados ..................................................... 8 1.3 Procedimiento para detectar e identificar errores en las mediciones ......................10 1.4 Método de la Matriz Aumentada de Hachtel ...........................................................12 1.5 Método de Factorización Ortogonal .......................................................................14 1.6 Método Híbrido. .....................................................................................................16 1.7 Método de Peters y Wilkinson ................................................................................16 Conclusiones parciales ................................................................................................17 Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad .................................................................................................18 2.1 Implementación de la formulación en MatLab ........................................................20 2.2 Ejemplo 1: Sistema de 3 barras .............................................................................23 2.2.1 Variante número 1 ...........................................................................................25 2.2.2 Variante número 2 ...........................................................................................27 2.2.3 Variante número 3 ...........................................................................................28 2.2.4 Variante número 4 ...........................................................................................30 2.2.5 Variante número 5 ...........................................................................................32 Conclusiones parciales ................................................................................................35 Capítulo 3. “Resultados y análisis de casos” ....................................................................36 3.1 Ejemplo número 1: Sistema de 14 barras ..............................................................36 3.2 Ejemplo número 2. Sistema de 30 barras ..............................................................42 3.3 Ejemplo número 3. Sistema de 39 barras ..............................................................47 3.4 Ejemplo número 4. Sistema de 118 barras ............................................................51.
(10) Conclusiones parciales ................................................................................................55 Conclusiones ...................................................................................................................56 Recomendaciones ...........................................................................................................57 Bibliografía.......................................................................................................................58 Anexos ............................................................................................................................60.
(11) Introducción. Introducción Las técnicas de estimación de estado han sido desarrolladas y aplicadas desde los años 70 fundamentalmente a niveles de generación y transmisión. La investigación realizada en redes de distribución, tiene dificultades para ser llevada a la práctica debido a sus características, las cuales originan que el problema de estimación de estado para sistemas de distribución sea muy desafiante [1]. La expansión e interconexión de los sistemas eléctricos de potencia ha dificultado a los centros de control de energía (CCE) la tarea de supervisar y operar de manera segura las redes eléctricas. En la operación de un sistema de distribución existe poca información en tiempo real para monitorear la red [2]. El voltaje y la potencia entregada a los alimentadores de subestación son usualmente las únicas magnitudes disponibles en los centros de control de distribución. Los Estimadores de Estado, determinan el estado más probable de un sistema de energía a partir de conjuntos de mediciones que son capturados de forma remota en las subestaciones y recogidos periódicamente por un Sistema de Supervisión, Control y Adquisición de Datos (SCADA en inglés), que suministra mayor número de magnitudes en tiempo real en los centros de control. Sin embargo no es posible medir cada magnitud de un sistema y transmitirlo hasta el centro de control, solo un número limitado de estas está disponible [3, 4]. Uno de los principales inconvenientes dentro del análisis en tiempo real de los sistemas de potencia consiste en la determinación del estado actual de la red cuando la información proporcionada por los medidores contiene inconsistencias, generalmente atribuidas a problemas en la calibración o al tiempo de funcionamiento de los mismos [2]. La falta de mediciones puede ser contrarrestada con la introducción de mediciones virtuales. Estas mediciones no requieren ser medidas, como por ejemplo la inyección cero en las subestaciones de transporte (nodos dé tránsito). Su introducción a la formulación clásica del método WLS para la estimación de estado implica la utilización de un factor de peso. Cuando estos factores de peso representan mediciones de muy buena calidad, introducen inestabilidades numéricas en el sistema de ecuaciones conformado para resolver el problema.. 1.
(12) Introducción Existen varias causas que provocan inestabilidades numéricas: la existencia de disparidad en los factores de peso, la existencia de un número elevado de medidas de inyección y la existencia de conexión entre líneas de transmisión cortas y largas. De manera común todas conllevan a problemas de lentitud en la convergencia hacia la solución así como fallos en dicha convergencia. Por estas razones este trabajo tiene como objetivo general, implementar una formulación alternativa (mediante restricciones de igualdad) al método WLS para resolver las Ecuaciones Normales que logre evitar las inestabilidades numéricas. Para ello se han trazado los siguientes objetivos específicos. 1. Hacer una revisión del estado del arte en lo referente a las formulaciones alternativas del método WLS. 2. Plantear e implementar una formulación alternativa (mediante restricciones de igualdad) al método WLS para la solución de las Ecuaciones Normales. 3. Ejecutar los algoritmos en casos concretos de sistemas eléctricos. Para su presentación, este Trabajo de Diploma se estructura de la forma siguiente: una Introducción, donde se fundamenta el tema desarrollado; un Capítulo I, que contiene el análisis sobre las principales concepciones teóricas de lo que se ha publicado en lo referente a métodos alternativos al WLS para resolver los problemas de las inestabilidades numéricas; un Capítulo II, en el que se explica las Formulaciones Alternativas de la Estimación de Estado WLS (mediante restricciones de igualdad) y un Capítulo III donde se aplica el algoritmo descrito a la solución de casos concretos extraídos de la literatura. Posteriormente se arriba a Conclusiones y se presentan Recomendaciones derivadas de la investigación realizada.. 2.
(13) Capítulo 1. “Estudio del estado del arte”. Capítulo 1. “Estudio del estado del arte” 1.1 Introducción En la comunidad académica es común encontrar aplicaciones o programas que permiten obtener el punto de operación de un sistema eléctrico a partir de una base de datos preestablecida. En la operación en tiempo real de los sistemas de potencia la obtención de estos datos es más compleja de lo que parece, debido al deterioro o pérdida de la información en el proceso de lectura, transmisión y recepción de los datos. Antes de que se haga cualquier evaluación de la seguridad de un sistema o de que se tomen acciones de control para el mismo, se debe determinar un estado confiable del estado existente de la información [5]. El estimador de estado es, básicamente, una herramienta utilizada por los centros de control de energía eléctrica para una construcción, en tiempo real, del modelo eléctrico del sistema. Este modelo creado en tiempo real, debe ser confiable, sobre todo en la operación de mercados de energía, donde cuestiones económicas entran en conflicto, como son los límites de operación del sistema. La importancia dada a la estimación del estado de los sistemas eléctricos ha creado la necesidad de nuevas metodologías de análisis que mejoren la confiabilidad y precisión [5]. Los primeros planteamientos de la teoría de la estimación de estado en sistemas eléctricos de potencia comenzaron a inicios de la década de los 70, desde entonces se ha convertido en una aplicación fundamental en los sistemas EMS (Energy Management System), puesto que obtiene el estado más probable el sistema, filtrando los errores producidos en las mediciones y de esta manera presenta información confiable y completa para la supervisión y control de sistemas de potencia, sirviendo de base para la ejecución de otras aplicaciones tales como: el análisis de contingencia y el flujo óptimo de potencia [6]. El principal objetivo del estimador de estado es determinar el estado correcto de operación del sistema. Para lograr este objetivo es necesario disponer de información en una base de datos relacionada con la localización e interconexión de los componentes del sistema, así como también se debe contar con la información entregada por el sistema de supervisión y adquisición de datos (SCADA= Supervisory Control and Data Adquisition) correspondiente a la lectura de los instrumentos de medición [7].. 3.
(14) Capítulo 1. “Estudio del estado del arte” Además de eso, existe otro tipo de información disponible para los CCE (Centro de Control de Energía), dicha información puede ser empleada en el proceso de estimación a pesar de no ser proveniente de ningún instrumento de medición. Este es el caso de los datos obtenidos por medio de registros históricos o en pronóstico de demanda, estas técnicas son conocidas como Pseudomedidas [8]. Todas las mediciones recolectadas en el CCE contienen errores propios del proceso de adquisición de datos y al ruido presente en la transmisión de la información. Por esta razón, se debe hacer una revisión previa para eliminar las mediciones que presentan grandes inconsistencias. Aun así, en algunas ocasiones es posible encontrar informaciones erróneas que logran evadir este filtro, este tipo de información deben ser identificada y separada del conjunto de datos que cumple con los requisitos de uso [9, 10]. Según Sepúlveda [7] para hacer esto posible, se cuenta con una metodología clásica de estimación de estado, la cual es conocida con el nombre de mínimos cuadrados ponderados (WLS = Weighted Least Square) la cual ejecuta un procedimiento estadístico y probabilístico sobre el conjunto de medidas, esperando depurar la información para estimar de forma precisa y segura las variables de estado del sistema y por consiguiente su punto de operación. La misma autora plantea que la relación encontrada entre el número de mediciones (nm) y el número de variables de estado (ve), es conocida como nivel de redundancia, por lo tanto se puede decir que NR = nm / 2n-1. Donde n es equivalente al número de barras del sistema. Según el valor obtenido del NR es posible encontrarse con los siguientes casos: 1.. Cuando NR=1 se efectúa un estudio convencional de flujo de carga. Aun así, este. procedimiento presenta algunas limitaciones, las cuales son presentadas a continuación. . Ante la falta de algún dato nodal, se hace imposible realizar el cálculo por medio de. este procedimiento. . Al encontrar mediciones erróneas, no logra detectar, ni identificar, ni desechar la. información obtenida. Los resultados finales reflejan los errores en los datos nodales. . A pesar de que en la práctica se dispone de mediciones de flujo de potencia (P, Q),. estas no se encuentran contempladas dentro del modelo matemático.. 2.. Cuando NR > 1 se ejecuta un estudio de estimación de estado. Esta metodología. no presenta las limitaciones descritas anteriormente para el análisis de flujo de carga. Es. 4.
(15) Capítulo 1. “Estudio del estado del arte” por esto que, un valor alto de NR juega un papel importante en la obtención de resultados confiables. 3.. Cuando NR<1 es decir, cuando existe deficiencia en el número de mediciones, se. hace necesario ejecutar un análisis de observabilidad antes de realizar la estimación de estado, para poder determinar la posibilidad de calcular las variables de estado del sistema. No obstante, en algunos casos, es imposible realizar el estudio de estimación de estado, dado que se han perdido uno o varios datos de forma simultánea, inclusive cuando NR>1. En definitiva la estimación de estado es una metodología que aprovecha la información redundante y se encuentra en condiciones de detectar, identificar y eliminar aquella información que presenta algún tipo de anormalidad a través del uso de la metodología clásica WLS [11]. Díaz [6] considera que un estimador de estado incluye básicamente las siguientes funciones: 1. Procesador topológico: Obtiene el modelo eléctrico de la red mediante la determinación del estado de los elementos de maniobra (interruptores y seccionadores) 2. Prefiltrado de mediciones: Se realiza una revisión de consistencia de mediciones, para detectar y descartar mediciones con errores gruesos, este proceso es también conocido como chequeo de razonabilidad. 3. Análisis de observabilidad: Determina si la redundancia, disponibilidad y distribución de mediciones permite que la estimación pueda realizarse sobre toda la red, y en caso contrario discrimina las partes observables de las que no lo son, formando lo que se llaman islas observables. 4. Estimación de estado: Calcula el estado más probable del sistema de potencia, ese estado puede ser conocido mediante la determinación de las variables de estado (voltajes complejos) en todas las barras de las islas observables. Para ello utiliza el modelo suministrado por el procesador topológico y las mediciones disponibles. Una vez de terminado el estado del sistema de potencia se puede obtener las estimación es de las mediciones.. 5.
(16) Capítulo 1. “Estudio del estado del arte” 5. Procesador de mediciones erróneas: Detecta la existencia de posibles errores en las mediciones, mediante las diferencias de los valores medidos y estimados, en base a ciertas probabilidades estadísticas. Si existe la cantidad suficiente de mediciones con la distribución adecuada será posible identificar y eliminar las mediciones erróneas. En la siguiente figura se muestra la dependencia funcional y las relaciones entre los distintos módulos que se acaban de describir.. Figura 1.1 Componentes de un estimador de estado y relaciones entre los mismos. Fuente: Grainger and Stevenson [12]. Como funcionalidad adicional, el estimador de estado puede proveer información confiable en puntos del sistema que no son telemedidos, siempre y cuando sea una sección. 6.
(17) Capítulo 1. “Estudio del estado del arte” observable de la red de potencia. El número de mediciones, así como su ubicación, tipo y precisión dependen de cada sistema de potencia, pero las mediciones más comúnmente utilizadas por los sistemas son las siguientes [6]: 1. Flujos: Flujos de potencia activa y reactiva medidos en ambos extremos de líneas y transformadores. 2. Inyecciones: Potencia activa y reactiva inyectada en las barras. Estas inyecciones suelen ser a su vez flujos de potencia por elementos que caen fuera del ámbito de modelación del sistema, normalmente en la frontera con el sistema de Distribución. 3. Magnitudes de Voltajes: Lecturas de voltaje en las barras del sistema de potencia. Pueden existir varias mediciones en la misma barra compuesto por varias barras acoplados por interruptores. 4. Magnitudes de corriente: Lecturas de corriente en ambos extremos de las líneas y transformadores. (Este tipo de mediciones son poco utilizadas) Cabe mencionar que todas las mediciones llevan asociado un error, que provienen de los transformadores de medición (potencial y corriente), del propio transductor, del proceso de conversión analógico-digital y del posible ruido introducido en la transmisión de la información, lo cual es asociado al sistema de comunicaciones. Por otra parte Manitsas, et al. [13] considera que de las mediciones ordinarias mencionadas en el párrafo anterior, existen ciertas magnitudes que, sin provenir de dispositivos de medida, pueden utilizarse como mediciones en el proceso de estimación, las mismas son listadas a continuación: 1. Mediciones virtuales: Valores que vienen impuestos por restricciones de la propia red. Las más comunes son las inyecciones cero ubicadas en las denominadas barras de tránsito (barras sin generación, ni consumo). 2. Pseudomediciones: Valores basados en datos históricos o en pronósticos de demanda, utilizados para mejorar la redundancia en zonas pobremente supervisadas.. 7.
(18) Capítulo 1. “Estudio del estado del arte” Mientras que las mediciones virtuales se consideran para todos los efectos, libres de errores, las pseudomediciones son consideradas en la mayoría de los casos como menos precisas que las mediciones ordinarias [14]. 1.2 Método de los Mínimos Cuadrados Ponderados Debido a la necesidad de conocer el estado actual de un sistema de potencia, se ha utilizado el método de mínimos cuadrados ponderados, el cual usa las variables de estado, es decir, el conocimiento de las magnitudes y de los ángulos de voltaje en cada uno de los nodos, para mostrar en cada instante el estado del sistema [7]. Teniendo como referencia el ángulo del nodo más débil, se puede determinar que para un sistema de nodos, se tiene un total de 2n - 1 variables de estado, los cuales corresponden a los valores de tensión y a los n - 1 ángulos de los nodos del sistema. Para que el estimador de estado pueda determinar el estado actual de la red, requiere como datos de entrada la siguiente información: . Valores de los parámetros y elementos de la red. Es decir, líneas de transmisión, elementos shunt, transformadores, entre otros.. . Datos concernientes a los medidores conectados al sistema. Lo que quiere decir, información sobre las inyecciones de potencia (Pi, Qj), flujos de potencia (Pij, Qij, Pij, Qij) y magnitudes de voltaje nodal (|Vi|).. Sepúlveda [7] considera que las mediciones anteriores pueden ser expresadas como una función, generalmente no lineal, de las variables de estado, agregando un término que representa el error asociado con tal medición. Eso debido a que el modelo matemático de estimación de estado así lo permite. Por lo tanto al tener un conjunto. de. ŋ. mediciones. y. variables. de. estado. se. obtiene. la. siguiente. expresión matricial: considera. Donde:. 8.
(19) Capítulo 1. “Estudio del estado del arte” Z: Representa el vector de mediciones del sistema. hi: Función no lineal que relaciona la medición i con el vector x. x: Representa el vector de las variables de estado. e: Representa el vector de errores de mediciones. Sabiendo que el error se encuentra definido como la diferencia entre el valor medido y el valor calculado, la expresión anterior puede ser expresada como [e] = [z] - [h(x)]. Debido a que los valores exactos de (x) no se pueden determinar, se realiza un cálculo iterativo para conocer sus estimados (Ẋ), por tanto el error estimado (ê) se calcula de la siguiente forma:. Los. errores. en. las. mediciones. se. consideran. como. variables. aleatorias. gaussianas independientes y su representación estadística se hace a través de la Función de Distribución de Probabilidad Normal con media µ y varianza σ2. La. metodología. de. mínimos. cuadrados. ponderados. busca. darle. un. peso. preferencial a aquellas mediciones que poseen valores más exactos. Para ello, se establece una matriz de ponderaciones W-1 la cual se define como una matriz diagonal cuyos elementos corresponden a los inversos de las varianzas individuales. de. cada medidor.. Por. tanto,. las ponderaciones más altas son. asignadas a los medidores más confiables.. Para cuantificar el error presente en la estimación se emplea la siguiente expresión conocida como la función de mínimos cuadrados J(Ẋ):. Para minimizar la expresión anterior se debe cumplir con las condiciones de optimalidad. de. primer. procedimiento. matemático. orden. usado. al. En aplicar. [12] el. es. método. presentado de. Newton. el para. 9.
(20) Capítulo 1. “Estudio del estado del arte” encontrar las variables de estado del sistema a través de un procedimiento iterativo tal como se muestra en la siguiente ecuación.. Siendo. Ẋ. las. convergencia. variables es. de. estado. alcanzada. estimadas. cuando. el. del. término. sistema ∆X→0.. y. en La. donde. la. expresión. matemática para ∆X se puede apreciar con detalle a través de la siguiente expresión:. Donde H corresponde a la matriz Jacobiana y el término HtWH se define como la matriz ganancia G, matriz simétrica cuyos valores de la diagonal principal corresponden a las varianzas. de. las. variables. de. estado.. Esta matriz en. algunas ocasiones presenta problemas de mal condicionamiento o singularidad imposibilitando el cálculo de las variables de estado. Por este motivo surgen varias técnicas encaminadas a reducir el mal condicionamiento de esta matriz [15]. 1.3 Procedimiento para detectar e identificar errores en las mediciones Un estimador de estado, a diferencia del flujo de carga, se encuentra en capacidad de detectar e identificar las medidas que puedan contener errores que alejen significativamente los resultados de los valores reales. Teniendo en cuenta que si algunas de las mediciones tuviesen errores los resultados del estimador no serían confiables, el principal objetivo de estos procedimientos es eliminar los efectos de estos errores sobre los resultados finales, permitiendo realizar acciones de control adecuadas en los centros de control.. Claramente en la ecuación anterior se puede apreciar como la condición de convergencia ∆x→ 0 es alcanzada cuando e → 0. Por tanto, cuando hay presencia de errores. en. las. mediciones. el. punto. de. operación. calculado. se. aleja de su valor real, lo que implica que para aplicaciones en tiempo real debe existir un procedimiento adicional que determine si los cálculos realizados en realidad hacen parte de resultados estimados de buena calidad. Para caracterizar los. 10.
(21) Capítulo 1. “Estudio del estado del arte” errores. se. debe. considerar. la. siguiente. clasificación. de. acuerdo a su desviación estándar [16]: . Errores de extrema amplitud: La diferencia entre el valor medido y el valor calculado sobrepasa hasta 20 veces su desviación υ.. . Errores de grande porte: La diferencia entre el valor medido y el valor calculado se encuentra entre 5 υ y 20 υ.. . Errores normales: La diferencia entre el valor medido y el valor calculado es menor a 5 υ.. Dentro de los procedimientos usados para detectar e identificar las mediciones con errores dentro del procedimiento de estimación de estado se encuentran los procedimientos estadísticos chi-cuadrado (X2k,α) y t-student (tk,α) [17]. Siendo α la probabilidad en. asociada. estadística. a. la. y. k. información. los. grados. independiente. de. libertad. disponible. para. asociados calcular. la. variabilidad de los datos. En estimación de estado los grados de libertad están asociados a la diferencia entre el número de mediciones y el número de variables de estado. El primer procedimiento según Sepúlveda [7] realiza una prueba global para detectar la presencia de errores en las mediciones. Este procedimiento establece que la siguiente ecuación se puede representar a través de la distribución de probabilidad chi-cuadrado siempre y cuando el error sea una variable aleatoria gaussiana.. La prueba Chi-cuadrado es una prueba de hipótesis de una cola donde el valor de J(Ẋ) se compara con el valor de X2k,α dada en tablas. De cumplirse la desigualdad J(Ẋ)< X2k,α los valores estimados para las variables de estado se aceptan. En caso de no cumplirse, es necesario realizar una segunda prueba estadística para identificar cuáles son las mediciones que tienen una influencia negativa sobre los valores estimados. El segundo procedimiento analizado también por la misma autora es una prueba realizada sobre cada medición para identificar puntualmente la medición que contiene algún tipo de error. Para ello se calcula la matriz de varianzas estimadas R=(I-GH-1HtW)W-1 en donde solo. interesan. mediciones. con. los. elementos. error. los. de. su. diagonal. errores. se. deben. principal. normalizar. Para por. identificar sus. las. respectivas. desviaciones de la siguiente forma:. 11.
(22) Capítulo 1. “Estudio del estado del arte”. La medición con error corresponde a aquella que presente un valor de error normalizado. de. mayor. cuantía.. La. medición. identificada. en. esta. prueba. estadística es eliminada del conjunto de medidas, por lo cual se debe realizar nuevamente restantes. estimación,. el. cálculo. Después detección. de. las. tendrán e. que. variables ser. identificación. de. estado. realizadas. para. las. operaciones. respectivamente.. El. mediciones cíclicas. de. procedimiento. finaliza cuando la prueba X2k,α no identifica la presencia de errores.. 1.4 Método de la Matriz Aumentada de Hachtel Para la resolución del problema de minimización con restricciones de x se utiliza el método de la matriz aumentada de Hachtel en el que las ecuaciones se aumentan con el vector de residuos y se resuelven en cada iteración. En el caso particular de que no existan restricciones de igualdad las ecuaciones a resolver se simplifican al no tener que hallar los multiplicadores de Lagrange, pero este método tiene el inconveniente de destruir la simetría de la matriz debido a los pivotamientos [18].. Este método también está llamado “tableau”, utiliza los residuos r de las mediciones como variables explicitas, dados por [6]:. Obteniendo el siguiente problema de optimización:. El lagrangeano resultante es:. Las condiciones de optimalidad son:. 12.
(23) Capítulo 1. “Estudio del estado del arte”. La tercera ecuación nos permite eliminar r (r=Rµ), con lo que se obtiene el siguiente sistema de ecuaciones:. Donde µ y λ son los multiplicadores de Lagrange. A la matriz de coeficientes se la conoce como la matriz aumentada de Hachtel. El método de la matriz aumentada de Hachtel provee estabilidad numérica y eficiencia computacional además de ser simple para la implementación [19].. Método de ecuaciones normales con restricciones. Para Aschmoneit, et al. [20] este método consiste en separar las inyecciones cero y crear una función Lagrangeana para solucionar el problema de minimización de la función objetivo de la siguiente manera:. Donde c(x) = 0 son las inyecciones cero. En [21] se plantea que para obtener la solución se utiliza la función Lagrangeana, la misma se deriva. En esas ecuaciones H(x) y C(x) son matrices Jacobianas. Estas ecuaciones lineales pueden ser resueltas mediante el teorema de Lagrange.. 13.
(24) Capítulo 1. “Estudio del estado del arte”. La solución del sistema no lineal anterior se obtiene iterativamente mediante el siguiente sistema lineal:. Donde:. Con la aplicación del método restricciones de igualdad, se genera un nuevo inconveniente, esto es, la matriz de ganancia G(x) deja de ser definitivamente positiva y su factorización LU se complica [6]. 1.5 Método de Factorización Ortogonal El método comienza realizando las transformaciones ortogonales a la función objetivo del método de mínimos cuadrados ponderados y a continuación se resuelve un sistema de ecuaciones mediante sustitución hacia atrás. Con el algoritmo propuesto por este método se evita tener que construir la matriz de ganancia, pero se emplea su matriz Q (de su transformación ortogonal o QR) que es más densa. Para la obtención de Q se utiliza la transformación de Givens [18]. Este método resuelve las restricciones de igualdad del estimador de estado WLS por linealización. El problema de optimización se presenta como:. 14.
(25) Capítulo 1. “Estudio del estado del arte” Donde H(.), C(.) y K(.) son matrices Jacobianas, ∆z= z – h(x), ∆b= 0 – c(x), ∆d= 0 – g(x) y ∆x pude ser usado para actualizar el valor de la variable de estado. El método de factorización ortogonal evita el ajuste de la matriz de ganancia al usar una descomposición de la matriz Jacobiana que es la siguiente:. Debido a que este método usa la factorización ortogonal (Descomposición QR) de la Matriz , se tiene que:. Esta descomposición consiste en encontrar una matriz ortogonal Q y una matriz trapezoidal superior R, es decir:. Siendo U la matriz triangular superior que aparece en la factorización LU de G(x), se tiene lo siguiente:. Para aplicar la factorización ortogonal al problema de estimación de estado por el método WLS, se escribe la siguiente ecuación que ofrece una forma más compacta sin que aparezca explícitamente la matriz de ponderaciones de la siguiente manera:. Al utilizar la propiedad QQT= I la ecuación anterior puede transformarse sucesivamente de la siguiente forma:. Debido a que U es una matriz regular, la última expresión conlleva a:. 15.
(26) Capítulo 1. “Estudio del estado del arte” Por lo tanto, no es requerido formar y factorizar la matriz G(x). Además la transformación ortogonal es numéricamente más robusta que la factorización LU, por lo que la utilización de pesos altos para las mediciones virtuales no genera problemas de convergencia [22]. El principal inconveniente que presenta este método es la necesidad de obtener la matriz Q, esta matriz es más densa que G(x) por lo que requiere de cálculos computacionales más demandantes. 1.6 Método Híbrido. Los puntos principales de este método son la transformación ortogonal de la matriz Jacobiana (H), con lo que se evita la necesidad de utilizar la matriz de ganancia (G), y la resolución de las ecuaciones normales mediante eliminación hacia adelante y sustitución hacia atrás sin necesidad de tener que almacenar Q [19]. Los pasos a seguir son los siguientes [23]: 1- Obtener U mediante transformaciones ortogonales sobre la matriz Jacobiana. No hay necesidad de almacenar la matriz Q. 2- Calcular el vector independiente.. 3- Obtener ∆x resolviendo el sistema siguiente.. Las ecuaciones normales son resueltas en el paso 3, pero U se obtiene al transformar H y no mediante la factorización triangular de G. Este método proporciona una mayor estabilidad y robustez ante errores, pero computacionalmente no es eficiente ya que requiere de mayor número de operaciones. 1.7 Método de Peters y Wilkinson Este método también es conocido como el método de pseudo-inversas, realiza una minimización de errores de mínimos cuadrados con una transformación del problema original. Esta transformación (Descomposición LU) consiste precisamente en encontrar dos matrices L (m filas por n columnas) y U (n filas por n columnas) para la matriz igual a LU (m filas por n columnas). Esta factorización no es única y debe ser realizada para mantener a la matriz U como no-singular. La factorización más conveniente es tal que la matriz L es trapezoidal inferior y U es trapezoidal superior [24].. 16.
(27) Capítulo 1. “Estudio del estado del arte” Al sustituir las ecuaciones normales se tiene:. Con lo que son sucesivamente se transforma de la siguiente forma:. Donde:. En resumen, el método de Peters y Wilkinson, realiza la minimización del error de mínimos cuadrados mediante la transformación del problema original a través de trasformaciones ortogonales. La solución se obtiene mediante el cálculo de una variable intermedia por resolución hacia adelante y hacia atrás y posteriormente se resuelve un segundo sistema de ecuaciones mediante factorización dispersa para finalmente hallar la solución con otro sistema de ecuaciones también por resolución hacia adelante y hacia atrás [25].. Conclusiones parciales. 1. Existen varias técnicas para resolver el problema de la estimación del estado de un sistema de potencia, siendo el método de mínimos cuadrados ponderados el más empleado, comentado y extendido dentro de la literatura. 2. Cuando el método de mínimos cuadrados ponderados se aplica a grandes circuitos de cierta complejidad y que además presenten restricciones, aparecen problemas de mal condicionamiento numérico, lo cual provoca afectaciones en la estimación de estado. 3. Para resolver esta situación se ha propuesto la alternativa de desarrollar una formulación con restricciones de igualdad, la cual permita mejorar el mal condicionamiento numérico y así lograr una mejor estimación de estado.. 17.
(28) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad”. Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” En el método WLS para la resolución del estimador de estado, las inyecciones cero son tratadas como mediciones de alta precisión asignándolas pesos altos (valor bajos de varianza), pero ese tratamiento generalmente produce problemas en la construcción de la matriz de ganancia G(x) que pueden causar la divergencia del estimador de estado. EL mal condicionamiento de la matriz ganancia G(x) que viene dado por la proximidad a la singularidad (problemas para invertirla) de su matriz de coeficientes, se puede producir por las siguientes causas: . La utilización simultanea de pesos muy altos para las inyecciones cero y relativamente baja para pseudomediciones.. . La incidencia simultánea de líneas muy cortas y largas en el mismo nodo.. . La existencia de un porcentaje elevado de mediciones de inyección frente a mediciones de flujos.. El método de restricciones de igualdad permite eliminar el mal condicionamiento debido a la utilización simultánea de pesos muy altos para las inyecciones cero. En el presente capítulo se desarrollará una formulación mediante restricciones de igualdad, dicho método se desarrollará mediante dos vías diferentes. Primeramente es necesario recordar en el primer capítulo todo lo mencionado del método restricción de igualdades para un mejor entendimiento de la formulación. Recuérdese que: Este método consiste en separar las inyecciones cero y crear una función Lagrangeana para solucionar el problema de minimización de la función objetivo de la siguiente manera: . Versión lambda:. Donde c(x) = 0 son las inyecciones cero.. 18.
(29) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Para la solución se utiliza la función Lagrangeana, la misma se deriva. En esas ecuaciones H(x) y C(x) son matrices Jacobianas. Estas ecuaciones lineales pueden ser resueltas mediante el teorema de Lagrange.. La solución del sistema no lineal anterior se obtiene iterativamente mediante el siguiente sistema lineal:. Donde:. . Versión rho:. Sistema de ecuación:. 19.
(30) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Con la aplicación del método restricciones de igualdad, se genera un nuevo inconveniente, esto es, la matriz de ganancia G(x) deja de ser definida positiva y su factorización LU se complica. Una vez recordado toda la teoría expuesta en el primer capítulo se pasa a la siguiente fase, desarrollar una formulación del método de restricciones de igualdad. 2.1 Implementación de la formulación en MatLab Los algoritmos expuestos anteriormente fueron implementados aprovechando las ventajas de la plataforma del MatLab. . La técnica de restricción de igualdades versión lambda y versión rho dio lugar a las siguientes líneas de códigos.. %1) Start iterations %------------------k = 0; %iteration index %--------------------------------------------------%2) Initialization state vector (xk) as a flat start %--------------------------------------------------%Flat Voltage Profile V = ones (Net.nN,1); %Voltage Vector An = zeros(Net.nN,1); %Angle Vector x0 = [An([2:size(V,1)]); V]; x = x0; % Scaling Factor alpha = 1/(max(max(W))); % a = 1/max(Wii) % alpha = (Net.nM)/(sum(diag(W)));% a = m/(sum(Wii)) % Number of Elements %%% nLs = size( c,1); % 'c' is a column vector (not used) nX = size(x0,1); % Number of elements in 'x' (Number of Estates) while (bconv==false)&(k<20),. 20.
(31) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” k = k + 1;%Count for iterations %---------------------------------------% Calculate H (Measurement Jacobian) [H] = h_jacob(x,Net); % Calculate 'h(xk)' [h] = h_fun(x,Net); %--New Code----------------------------------------------Dz = (z-h); % Calculate 'c(xk)' (Constraint Vector) = (accurate virtual measurements) [c] = c_fun(x,Net); % Calculate 'C(xk)' (Constraint Jacobian) = (Jacobian of 'c(xk)') [C] = c_jacob(x,Net); nC = Net.nC; % Number of Constrains. %--New Code----------------------------------------------% State vector actualization x = x + Dx; %--------------------------------------------------------%6) Test for convergence, max /Dxk/ <= eps? %--------------------------------------------------------%ermax = max(abs(Dx)); ermax = norm(Dx); %ermax = sum(abs(Dx)); %ermax = (Dx.'*Dx); %ermax = (Dx.'*Dx)^0.5; bconv = (ermax<tol);. 21.
(32) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” En primer lugar, las líneas de código expuestas anteriormente son comunes para el desarrollo de la formulación de ambas técnicas. El primer paso es inicializar las diferentes variables que intervendrán en el proceso. Se emplea una variable (k) para contar las iteraciones y para controlar la tolerancia se emplea otra (tol) cuyo valor pudiera estar en 1x10-6 por ejemplo. Es tradición comenzar el proceso iterativo desde una arrancada plana. Esto es equivalente a decir que el vector del módulo de los voltajes (V) se inicializa en uno para todas sus posiciones y el vector de los ángulos de los voltajes (An) se inicializa en cero. El vector de estado (x) queda conformado con los valores de los ángulos seguidos de los valores de los módulos de los voltajes. El valor inicial de este vector se coloca en x0. El ciclo iterativo de cálculo se ejecuta mediante una sentencia repetitiva que chequea la condición de terminación al inicio del proceso. La condición de terminación se conforma mediante una expresión booleana que chequea si la iteración corriente no supera un valor máximo (por ejemplo 20 iteraciones) y si una variable de control (bconv) de convergencia es falsa. Dentro del ciclo se calcula el valor de la Jacobiana (H) en función del valor de la variable de estado en la iteración corriente (x). Luego se calcula el vector de las mediciones estimadas (h) empleando los valores del vector de estado para conformar el vector de las diferencias (Dz) entre lo medido (z) y lo estimado (h). Luego se pasa a calcular el vector de las restricciones (c) en función del vector de estado (x) con los valores de la iteración corriente (xk). Esto es equivalente a calcular la matriz h pero solamente para mediciones de inyección de potencia de valor nulo que hayan sido colocadas como restricciones en la formulación del problema. Posteriormente se procede a calcular la matriz Jacobiana de las restricciones (C) en función del vector de estado (x) con los valores de iteración corriente (xk). Esto es equivalente a calcular la matriz H solamente para mediciones de inyección de potencia de valor nulo que hayan sido colocadas como restricciones en la formulación del problema. Se conforman los coeficientes a11, a12, a21 y a22 de la matriz de los coeficientes (A) del sistema de ecuaciones. Se conforma el vector de los términos independientes (B) del sistema de ecuaciones referido. Se calcula el vector de los términos independientes y se almacena en DxLs.. 22.
(33) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Con estos elementos se plantea y se resuelve el sistema de ecuaciones separando el vector de las incógnitas (versión lambda): a11 = alpha*H.'*W*H; a12 = C.'; a21 = C;. a22 = zeros (nC, nC);. %A = [alpha*H.'*W*H C.'; C zeros ()]; A = [a11 a12; a21 a22]; B = [alpha*H.'*W*Dz; -c]; [k cond(A)], pause; DxLs = A\B; %=inv (A)*B; % DxLs = [Dx Ls] Dx = DxLs (1: nX); Ls = DxLs (nX+1: end); Para la técnica de restricción de igualdades versión rho, la formulación desarrollada fue de igual forma, solamente se diferencian en la forma que se plantea y resuelve el sistema de ecuaciones, dichas líneas de código dio lugar a la siguiente formulación: a11 = H.'*W*H; a12 = C.'; a21 = C;. a22 = ones (nC, nC). /rho;. %A = [H.'*W*H, C.'; C, (1/rho)]; A = [a11 a12; a21 a22]; B = [H.'*W*Dz; -c]; DxL = A\B; %=inv (A)*B; % DxLs = [Dx Ls] Dx = DxL (1: nX); L = DxL (nX+1: end). 2.2 Ejemplo 1: Sistema de 3 barras. Se considera un sistema de tres barras en el cual la línea de 2 a 3 es el doble de la distancia de la línea de 1 a 2 y sus respectivas impedancias son L1-2 (0.1+j0.2) y L2-3 (0.2+j0.4). Las mediciones de potencia y voltaje serán tomadas en los puntos 1 y 2.. 23.
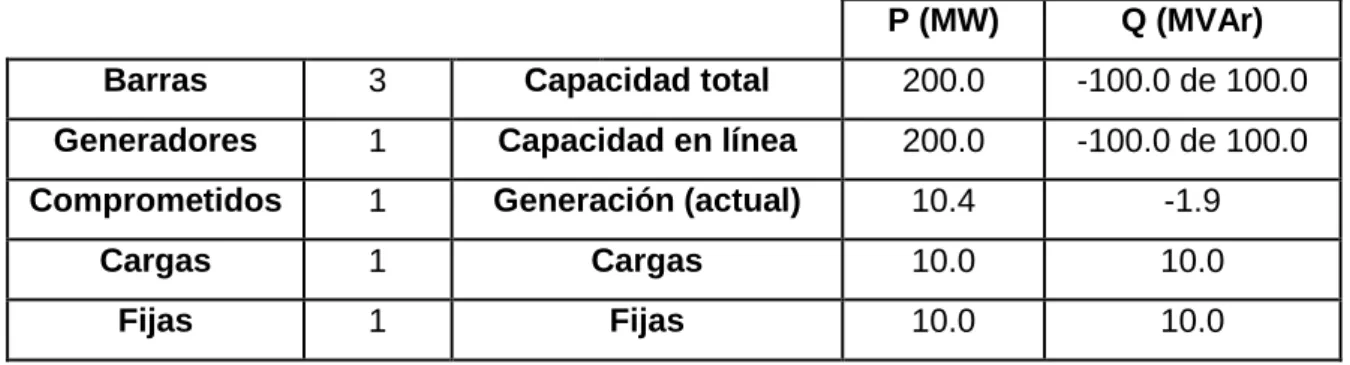
(34) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Como primer paso se correrá el flujo de carga del sistema de tres barras para la obtención generalizada de los datos del sistema.. A continuación se presenta la tabla 2.1 con los datos obtenidos por el flujo de carga para las barras del sistema: Tabla 2.1 Datos de las barras del sistema de tres barras. Voltajes Barras. Generación. Mag(pu) Ang(deg) P(MW). Cargas. Q(MVAr). P(MW). Q(MVAr). 1. 1.050. 0.000. 10.37. -1.90. ---. ---. 2. 1.040. -1.073. ---. ---. ---. ---. 3. 0.995. -2.620. ---. ---. 10.00. 10.00. Total. 10,37. -1.90. 10.00. 10.00. Seguidamente se presentan los datos de las ramas del sistema de tres barras obtenidos por el flujo de carga: Tabla 2.2 Datos de las ramas del sistema de tres barras. Inyección desde Inyección hasta Pérdidas(I^2 * Z) P. Q. P. Q. P. Q. Ramas. Desde. Hasta. (MW). (MVAr). (MW). (MVAr). (MW). (MVAr). 1. 1. 2. 10.37. -1.90. -10.28. -2.27. 0.098. 0.20. 2. 2. 3. 10.28. 2.27. -10.00. -10.00. 0.276. 0.55. Total. 0.373. 0.75. A continuación se presenta la tabla 2.3 con los datos generales del sistema de tres barras obtenidos por el flujo de carga: Tabla 2.3 Datos generales del sistema de tres barras. P (MW). Q (MVAr). Barras. 3. Capacidad total. 200.0. -100.0 de 100.0. Generadores. 1. Capacidad en línea. 200.0. -100.0 de 100.0. Comprometidos. 1. Generación (actual). 10.4. -1.9. Cargas. 1. Cargas. 10.0. 10.0. Fijas. 1. Fijas. 10.0. 10.0. 24.
(35) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Despachables. 0. Despachables. -0.0 de -0.0. -0.0. Shunt. 0. Shunt (Inyecciones). -0.0. 0.0. Ramas. 2. Pérdidas (I^2 * Z). 0.37. 0.75. Transformadores. 0. Ramas cargadas. -. 12.7. Interconexión. 0. Flujo de interconexión. 0.0. 0.0. Áreas. 1. Tabla 2.4 Resumen del sistema de tres barras. Mínimo. Máximo. Magnitud de voltaje. 0.995 p.u. en la barra 3. 1.050 p.u. en la barra 1. Ángulo de voltaje. 2.62 deg en la barra 3. 0.00 deg en la barra 1. P Pérdidas (I^2*R). -. 0.28 MW en la línea 2-3. Q Pérdidas (I^2*X). -. 0.55 MVAr en la línea 2-3. 2.2.1 Variante número 1 Se toman como mediciones las transferencias de potencia de P y Q por las líneas, siendo i nodo de envió y j nodo de recibo. Además se toma en cuenta una inyección de potencia activa nula P en el nodo 2 a la cual se le agrega un factor de calidad (Rii^0.5) de 0.0080.. 25.
(36) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Resultados: Tabla 2.5 Proceso iterativo del método de restricciones de igualdad. iteración. n.cond. 1. 2,27*1017. 2. 1.75*108. 3. 2.55*108. 4. 2.58*108. 5. 2.59*108 Variante 1. Al ejecutar el estimador de estado con los datos planteados se puede observar del mal condicionamiento del sistema dado a que el número de condición desde la primera iteración es muy elevado (2.27*1017). Al continuar con el proceso iterativo el número de condición disminuye tratando de lograr la convergencia, luego como se puede observar, desde la iteración 2 hasta la iteración 5 el programa mantuvo un número de condición equilibrado, logrando así la convergencia con un resultado de Jmin= 7.7488*10-19 para la versión lambda, para la versión rho Jmin=1.3121*10-17.. A continuación se presentan las tablas 2.6 y 2.7 con los valores de voltajes y ángulos estimados por el programa. Tabla2.6 Voltajes y ángulos versión lambda. i. V(pu). A(degrees). 1. 1.05. 0. 2. 1.0397. -1.0731. 3. 0.99497. -2.6196. Tabla 2.7 Voltajes y ángulos versión rho. i. V(pu). A(degrees). 1. 1.05. 0. 2. 1.0397. -1.0731. 3. 0.99497. -2.6196. Como se puede observar los valores de ambas tablas son exactamente iguales, entendiéndose así la elevada exactitud de la estimación de estado por ambas versiones del método de formulación con restricciones de igualdad.. 26.
(37) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Resultados de los métodos normales: Tabla 2.8 Resultados de los métodos normales. Método No. Condición Iteraciones Jmin WLS 5.0814828*1016 6 4.2066*10-15 Ortogonal 7.2073387*1016 20 394.5141 Híbrido 1137688.7 20 394.5141 18 P&W 16.309714 5.5988455*10 20 394.5141 Como se puede observar todos los métodos normales presentan un mal condicionamiento para lograr su convergencia, esto se debe al alto valor del número de condición que presentan cada uno de ellos, lo que le impiden también lograr la reducción de Jmin. Sin embargo como se puede observar, el método WLS pese a su elevadísimo número de condición, logra la convergencia en 6 iteraciones, simplificando excelentemente la Jmin, logrando un valor muy cercano a cero. 2.2.2 Variante número 2 Para la siguiente variante se toman los mismos datos, solo que se asume la inyección de potencia activa en el nodo 2 como una restricción, en este caso no se tiene en cuenta el factor de calidad.. Resultados: Tabla 2.9 Proceso iterativo del método de restricciones de igualdad. iteración. n.cond. 1. 1,34*1017. 2. 5,89*107. 3. 8,51*107. 4. 8,46*107. 5. 8,46*107 variante 2. 27.
(38) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” En este caso se comienza también con mal condicionamiento pero converge en la quinta iteración dando como resultado una Jmin= 2.92*10-19 para la versión lambda, para la versión rho Jmin= 4.31*10-19. A continuación se observan las tablas 2.10 y 2.11 con los resultados estimados por el programa para ambas versiones: Tabla 2.10 Voltajes y ángulos versión lambda. i. V(pu). A(degrees). 1. 1.0521. 0. 2. 1.04. -1.0731. 3. 0.995. -2.6196. Tabla 2.11 Voltajes y ángulos versión rho. i. V(pu). A(degrees). 1. 1.0521. 0. 2. 1.04. -1.0731. 3. 0.995. -2.6196. Al igual que en la variante 1, en la presente variante ambas versiones obtienen el mismo valor estimado tanto para voltaje como para ángulo, incluso, su puede observar y analizar ambas variantes, teniendo en cuenta de que los datos introducidos al programa son diferentes, pero el resultado de estimación de estado en ambos casos es exactamente el mismo, lo que da a entender la precisión de dicha formulación de restricciones de igualdad, tanto para la versión lambda como para la versión rho.. Es importante destacar que los métodos normales (WLS, Ortogonal, Híbrido, P&W) no llegan a la convergencia para esta variante, demostrando así el poder para la estimación de estado del método de restricciones de igualdad, este realizado por ambas vías, lambda y rho.. 2.2.3 Variante número 3 En la siguiente variante se estará analizando el mismo ejemplo, pero en este caso se analizará combinando las dos variantes anteriores, o sea, una inyección de potencia activa nula P en el nodo 2, a la cual se le agrega un factor de calidad (Rii^0.5) de 0.0080, y una inyección de potencia activa en el nodo 2 como una restricción a la que no se le tendrá en cuenta su factor de calidad.. 28.
(39) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad”. Resultados: Tabla 2.12 Proceso iterativo del método de restricciones de igualdad. iteración. n.cond. 1. 7.74*104. 2. 7.36*104. 3. 7.68*104. 4. 7.67*104 variante 3. Como se puede percibir, para esta variante el programa contó solamente con cuatro iteraciones, las cuales estuvieron muy equilibradas entre sí, entendiéndose por esto, un mejor acondicionamiento del sistema para la estimación de estado. El proceso obtuvo como resultado una Jmin= 8.7*10-11 para la versión lambda e igual resultado de Jmin para la versión rho. Se continúa presentando las tablas 2.13 y 2.14 con los resultados estimados de voltaje y ángulo por el programa, tanto para la versión lambda como para la versión rho:. Tabla 2.13 Voltajes y ángulos versión lambda. i. V(pu). A(degrees). 1. 1.05. 0. 2. 1.039. -1.0731. 3. 0.9949. -2.6196. 29.
(40) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Tabla 2.14 Voltajes y ángulos versión rho. i. V(pu). A(degrees). 1. 1.05. 0. 2. 1.039. -1.0731. 3. 0.9949. -2.6196. Una vez más se puede observar que, los resultados estimados por el programa son exactamente igual para ambas versiones. Resultados de los métodos normales: Tabla 2.15 Resultados de los métodos normales. Método. No. Condición. WLS. 5.0814828*1016. Ortogonal. 7.2073387*1016. Híbrido. 1137688.7. P&W. 16.309714. 5.5988455*1018. Como se puede observar el número de condición en cada uno de los casos para los métodos normales es muy elevado, provocando esto la divergencia en cada uno de los métodos normales de estimación de estado. 2.2.4 Variante número 4 Una vez más se analizará el ejemplo de tres barras, en este caso se analizará añadiéndole una inyección de potencia activa nula P y una inyección de potencia reactiva nula Q, los datos seguirán siendo los mismos, al igual que el factor de calidad seguirá siendo 0.0080, para ambas mediciones de potencias nulas.. 30.
(41) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Resultados: Tabla 2.16 Proceso iterativo del método de restricciones de igualdad. iteración. n.cond. 1. 1.5038*105. 2. 1.4216*105. 3. 1.4410*105. 4. 1.4403*105 variante 4. Una vez más como en las anteriores variantes, se observa que el número de condición es un tanto elevado, pero no obstante a esto el programa converge con cierta facilidad, llegando a minimizar Jmin=8.5955*10-11 para la versión lambda e igual valor de Jmin para la versión rho. Tabla 2.17 Voltajes y ángulos versión lambda. i. V(pu). A(degrees). 1. 1.05012. 0. 2. 1.03882. -1.0731. 3. 0.995. -2.6196. Tabla 2.18 Voltajes y ángulos versión rho. i. V(pu). A(degrees). 1. 1.05012. 0. 2. 1.03882. -1.0731. 3. 0.995. -2.6196. Tabla 2.19 Resultados de los métodos normales. Método. No. Condición. Iteraciones. Jmin. WLS. 150375.37. 4. 8.5955*10-11. Ortogonal. 387.78263. 4. 8.5955*10-11. Híbrido. 206008.79. 5. 2.2452*10-15. 4. 8.5955*10-11. P&W. 16.903276. 229.48316. Como se puede observar en la tabla, los número de condición son un tanto elevados, sin embargo, cada uno de estos métodos normales logra la convergencia en un máximo de 5. 31.
(42) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” iteraciones, como es el caso del método híbrido, el resto de estos métodos logra la convergencia en solo cuatro iteraciones. Cabe destacar también que, pese al elevado número de condición obtenidas en esta variante por los métodos normales, estos pudieron minimizar los valores de Jmin hasta ser casi cero, logrando así, una buena eficiencia para la estimación de estado. 2.2.5 Variante número 5 Para la siguiente variante se retomará la variante número cuatro, pero esta vez se manipulará manualmente el factor de calidad de las potencias nulas activas y reactivas añadidas, el factor de calidad se irá aumentando diez veces a partir del factor de calidad tomado por defecto. Luego se realizará el mismo procedimiento pero a la inversa, se disminuirá diez veces a partir del factor de calidad tomado por defecto. Recordar que el valor del factor de calidad tomado por defecto hasta ahora para todas las variantes analizadas, es de 0.0080.. Los resultados de la primera parte de la variante número cinco se presentarán a continuación en la siguiente tabla. Además se muestran los resultados de los métodos normales y los del método de restricciones de igualdad: . Factor de calidad: 0.0080. Tabla 2.20 Resultados variante 5, factor de calidad 0.0080 Método. Jmin. Iteraciones. Convergencia. Restricción de igualdades Lambda/Rho WLS. Jminλ=8.5955*10-11 Jminρ=8.5955*10-11 8.5955*10-11. λ=4 ρ=4 4. Si converge Si converge Si converge. 32.
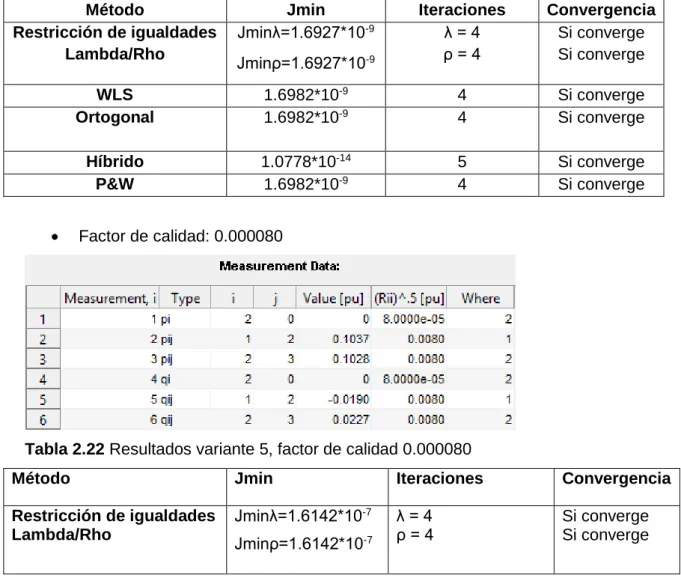
(43) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Método. Jmin. Iteraciones. Convergencia. Ortogonal. 8.5955*10-11. 4. Si converge. Híbrido. 2.2452*10-15. 5. Si converge. P&W. 8.5955*10-11. 4. Si converge. . Factor de calidad: 0.00080. Tabla 2.21 Resultados variante 5, factor de calidad 0.00080 Método Restricción de igualdades Lambda/Rho. . Jmin Jminλ=1.6927*10-9 Jminρ=1.6927*10-9. Iteraciones λ=4 ρ=4. Convergencia Si converge Si converge. WLS Ortogonal. 1.6982*10-9 1.6982*10-9. 4 4. Si converge Si converge. Híbrido P&W. 1.0778*10-14 1.6982*10-9. 5 4. Si converge Si converge. Factor de calidad: 0.000080. Tabla 2.22 Resultados variante 5, factor de calidad 0.000080 Método. Jmin. Iteraciones. Convergencia. Restricción de igualdades Lambda/Rho. Jminλ=1.6142*10-7. λ=4 ρ=4. Si converge Si converge. Jminρ=1.6142*10-7. 33.
(44) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Método. Jmin. Iteraciones. Convergencia. WLS. 1.6143*10-7. 4. Si converge. Ortogonal. 1.6143*10-7. 4. Si converge. Híbrido. 2.069*10-11. 5. Si converge. P&W. 1.6143*10-7. 4. Si converge. . Factor de calidad: 0.0000080. Tabla 2.23 Resultados variante 5, factor de calidad 0.0000080 Método Restricción de igualdades Lambda/Rho. Jmin Jminλ=1.6148*10-5. WLS Ortogonal. 1.6159*10-5 1.6134*10-5. Híbrido P&W . Jminρ=1.6129*10-5. 3.1391*10-10 1.6134*10-5 Factor de calidad: 0.00000080. Iteraciones λ=4 ρ=4. Convergencia Si converge Si converge. 4 4. Si converge Si converge. 20 4. No converge Si converge. 34.
(45) Capítulo 2. “Formulaciones Alternativas de la Estimación de Estado WLS mediante restricciones de igualdad” Tabla 2.24 Resultados variante 5, factor de calidad 0.00000080 Método. Jmin. Iteraciones. Convergencia. Restricción de igualdades Lambda/Rho. Jminλ=0.0016885. λ=4 ρ=4. Si converge Si converge. WLS. 1.6159*10-5. 4. Si converge. Ortogonal. 0.0016135. 4. Si converge. Híbrido P&W. 5625000394.5141 0.0016134. 20 4. No converge Si converge. Jminρ=0.0016253. Como se pudo observar en esta variante, no por mejorar el factor de calidad de la medición, se obtendrá un mejor valor de estimación de estado, se puede observar que a medida que se fue mejorando el factor de calidad de la medición, los métodos comenzaron a obtener un valor más elevado de Jmin que el que habían presentado con factor de calidad por defecto (0.0080). Cuando el factor de calidad alcanzó un valor de 0.0000080, se observó que el método híbrido se fue de equilibrio alcanzando hasta 20 iteraciones para tratar de lograr su convergencia.. Para finalizar esta primera parte de la variante número cinco, es válido aclarar, que los métodos analizados obtuvieron unos valores de voltajes y ángulos estimados, muy similares a los de la variante número cuatro, solamente el método híbrido se fue de rango estimando valores pocos lógicos cuando fue elevado el factor de calidad hasta 0.0000080, lo que le provocó dificultades de convergencia, alcanzando hasta 20 iteraciones.. Conclusiones parciales. 1. Se logró implementar una formulación de restricciones de igualdad en MatLab para el proceso de estimación de estado de sistemas eléctricos. 2. El método implementado obtuvo mejores resultados que los métodos normales en cuanto a condicionamiento numérico. 3. Con el método implementado de restricciones de igualdad se logró la estimación de estado en circuitos que no pudieron ser estimados por los métodos normales.. 35.
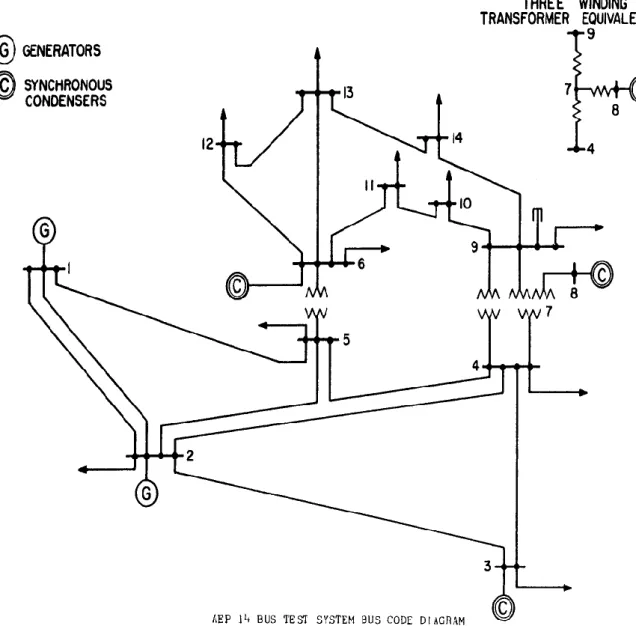
(46) Capítulo 3. “Resultados y análisis de casos”. Capítulo 3. “Resultados y análisis de casos” En el presente capítulo, se muestran los resultados de los algoritmos descritos en el capítulo anterior, estos serán aplicados a diferentes casos obtenidos de la literatura. Para el presente capítulo, los sistemas de potencia 14, 30 y 118 barras, fueron tomados de la página oficial del Departamento de la Universidad de Ingeniería Eléctrica de Washington (www.ee.washington.edu).. 3.1 Ejemplo número 1: Sistema de 14 barras. Fig. 3.1 Sistema de 14 barras.. 36.
(47) Capítulo 3. “Resultados y análisis de casos” Primeramente se corre el flujo de potencia para el sistema de 14 barras, los resultados se muestran a continuación en tablas. Tabla 3.1 Datos generales del sistema de 14 barras. P(MW). Q(MVAr). Barras. 14. Capacidad Total. 21. 0,0 de 20,0. Generadores. 2. Capacidad en línea. 21. 0,0 de 20,0. Comprometidos. 2. Generación (actual). 3,6. 3,4. Cargas. 10. Cargas. 3,6. 3,5. Fijas. 10. Fijas. 3,6. 3,5. Despachables. 0. Despachables. -0,0 de -0,0. -0,0. Shunt. 0. Shunt (Inyecciones). 0,0. 0. Ramas. 16. Pérdidas (I^2 * Z). 0,01. 0,01. Transformadores. 0. Ramas cargadas. -. 0,1. Interconexión. 0. Flujo de interconexión. 0. 0,0. Áreas. 1. Tabla 3.2 Resultado del flujo de potencia en las barras. Voltajes. Generación. Barras Voltaje(p.u) Ángulo(deg) P(MW). Barras. Cargas Voltaje(p.u) Ángulo(deg). 1. 1,0497. -0,0061. 0. 1. 1,0497. -0,0061. 2. 1,0487. -0,0254. 0. 2. 1,0487. -0,0254. 3. 1,0484. -0,0285. 0. 3. 1,0484. -0,0285. 4. 1,0495. -0,0089. 0. 4. 1,0495. -0,0089. 5. 1,0481. -0,0319. 0. 5. 1,0481. -0,0319. 6. 1,0481. -0,0340. 0. 6. 1,0481. -0,0340. 7. 1,0500. 0. 2,6731. 7. 1,0500. 0. 8. 1,0500. 0. 0,9340. 8. 1,0500. 0. 9. 1,0496. -0,0057. 0. 9. 1,0496. -0,0057. 10. 1,0485. -0,0242. 0. 10. 1,0485. -0,0242. 11. 1,0480. -0,0313. 0. 11. 1,0480. -0,0313. 12. 1,0494. -0,0114. 0. 12. 1,0494. -0,0114. 13. 1,0479. -0,0322. 0. 13. 1,0479. -0,0322. 14. 1,0479. -0,0340. 0. 14. 1,0479. -0,0340. 37.
(48) Capítulo 3. “Resultados y análisis de casos” Tabla 3.3 Resultado del flujo de potencia en las líneas.. Inyección desde. Inyección hasta. Q Ramas Desde Hasta P (MW). Pérdidas(I^2 * Z). Q. Q. (MVAr). P (MW). (MVAr). P (MW). (MVAr). 1. 7. 1. 2,6731. 2,12. -2,6725. -2,1221. 0,001. 0,00. 2. 1. 2. 2,0100. 1,65. -2,0087. -1,6695. 0,001. 0,00. 3. 2. 3. 1,1087. 0,97. -1,1085. -0,9912. 0,00. 0,00. 4. 1. 4. 0,6625. 0,4724. -0,6624. -0,4723. 0,00. 0,00. 5. 9. 12. 0,8941. 0,6652. -0,8940. -0,6650. 0,00. 0,00. 6. 4. 5. 0,8926. 0,6202. -0,8916. -0,6190. 0,001. 0,00. 7. 5. 6. -0,01. -0,1410. 0,0084. 0,1410. 0,00. 0,00. 8. 8. 9. 3,1340. 2,4013. -3,1332. -2,4002. 0,001. 0,00. 9. 9. 10. 1,7089. 1,3870. -1,7075. -13,850. 0,001. 0,00. 010. 10. 11. 1,1075. 0,9350. -1,1071. -0,9344. 0,00. 0,00. 11. 12. 13. 0,8940. 0,6650. -0,8929. -0,6637. 0,001. 0,00. 12. 13. 14. 0,0929. 0,0137. -0,0929. -0,0137. 0,00. 0,00. 13. 7. 8. 0. 0. 0. 0. 0. 0. 14. 14. 11. -0,21. -0,2063. 0,2071. 0,1844. 0,00. 0,00. 15. 4. 9. -0,23. -0,1479. 0,2302. 0,1480. 0,00. 0,00. 16. 6. 3. -0,41. -0,4410. 0,4085. 0,4412. 0,00. 0,00. Caso 1: En este primer caso de este ejemplo de 14 barras, se tomará como datos, las transferencias de potencias activas y reactivas por las líneas obtenidas del flujo de potencia, además se tendrá en cuenta unas inyecciones de potencias nulas activas y reactivas en los 4 y 12. A continuación se muestra una tabla con los resultados del proceso iterativo del método de restricciones de igualdad, tanto para la versión lambda como para la versión rho: Tabla 3.4 Resultado del proceso iterativo del método de restricciones de igualdad. Métodos. Iteraciones. Jmin. Converge. Lambda. 4. 3.8547*10-13. SI. Rho. 4. 5.9376*10-13. SI. 38.
(49) Capítulo 3. “Resultados y análisis de casos” Como se puede observar, ambas versiones del método de restricciones de igualdad convergen sin problemas en solo 4 iteraciones, a pesar de su mal condicionamiento numérico llegando a obtener unos muy elevados números de condiciones. Es válido destacar, que la versión lambda tuvo una mínima ventaja sobre la versión rho a la hora de reducir Jmin. A continuación, se muestra los resultados de los valores estimados de voltaje y ángulo por ambas versiones del método de restricciones de igualdad: Tabla 3.5 Resultados de los valores estimados por el método de restricciones de igualdades. Nodos. V(pu). A(degrees). 1. 1,04967. 0. 2. 1,04871. -0,0193732. 3. 1,04842. -0,022421. 4. 1,04954. -0,00288592. 5. 1,04806. -0,0258338. 6. 1,04813. -0,0279832. 7. 1,05. 0,0060634. 8. 1,05. 0,0060634. 9. 1,04965. 0,000321555. 10. 1,04854. -0,018097. 11. 1,04802. -0,0252275. 12. 1. -0,00532848. 13. 1. -0,0261772. 14. 1,04788. -0,0279573. Ahora se pasará a analizar el proceso iterativo por los métodos normales, los resultados se muestran a continuación en la siguiente tabla. Tabla 3.6 Resultados del proceso iterativo de los métodos normales. Método. No. Condición. Iteraciones. Jmin. Converge. WLS. 1.7473342*108. 4. 1.3131*10-12. SI. Ortogonal. 13218.677. 4. 5.890110-13. SI. Híbrido. 1.3099257*108. 20. 0.0045179. NO. 39.
(50) Capítulo 3. “Resultados y análisis de casos” Método P&W. No. Condición 121.85012. Iteraciones. Jmin. Converge. 4. 5.890110-13. SI. 12682.363. En este caso, excepto el método híbrido que no logró converger, los restantes métodos normales logran su convergencia con facilidad en solo 4 iteraciones. Estos métodos presentaron un elevado número de condición, no obstante, logran disminuir la Jmin a pequeñísimos valores haciéndola casi cero. Los valores estimados de voltajes y ángulos, son exactamente igual a los de la tabla 3.5. Caso 2: En este caso se retoma el sistema de potencia de 14 barras, a diferencia del caso anterior, se tendrán en cuenta las inyecciones de potencias nulas activas y reactivas de los nodos 4 y 12 como restricciones. Se presentarán a continuación una serie de tablas, en estas se podrán observar primeramente, los resultados del proceso iterativo del método de restricciones de igualdad y de los métodos normales. También se podrá observar una tabla con los resultados de los voltajes y ángulos estimados. Para concluir este caso se analizarán y compararán los métodos de restricciones de igualdad y los métodos normales. Tabla 3.7 Resultados del proceso iterativo del método de restricciones de igualdad. Métodos. Iteraciones. Jmin. Converge. Lambda. 4. 9.791*10-14. SI. Rho. 4. 8.4209*10-14. SI. Al igual que en el anterior caso, ambas versiones del método de restricciones de igualdad, convergen con facilidad en cuatro iteraciones. En este caso la versión rho pudo reducir la Jmin a un valor más pequeño que la versión lambda. Cabe destacar, que para este caso ambas versiones obtuvieron un valor de Jmin menor al del caso anterior, entendiéndose por esto, que dicha formulación se encontró con un mejor condicionamiento para este sistema de 14 barras, al tener en cuenta las inyecciones de potencias nulas, como restricciones. Los resultados obtenidos en la estimación de voltaje y ángulo para el método de restricciones de igualdad, son iguales a los de la tabla 3.5.. 40.
Figure


+7


Documento similar
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
dente: algunas decían que doña Leonor, "con muy grand rescelo e miedo que avía del rey don Pedro que nueva- mente regnaba, e de la reyna doña María, su madre del dicho rey,
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
