Ingeniería inversa de la tarjeta 318 del sistema de selección de objetos aéreos en movimientos
69
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. INGENIERÍA INVERSA DE LA TARJETA 318 DEL SISTEMA DE SELECCIÓN DE OBJETOS AÉREOS EN MOVIMIENTO. Autor: Aniladys de las Mercedes Lismé Reyes. E-mail: [email protected] Tutor: Dr. C. Emilio F González Rodríguez. E-mail: [email protected] Consultante: Dr. Juan Pablo Barrios Rodríguez. E-mail: [email protected] Santa Clara 2014 “Año 56 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la carrera de Ingeniería en Telecomuniciones y Electrónica autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “Es gracia divina empezar bien. Gracia mayor persistir en el camino correcto Pero la mayor gracia de las gracias es no desistir nunca”.
(5) ii. DEDICATORIA. A mis padres, por estar siempre ahí apoyándome dándome fuerzas para seguir adelante ,por no abandonarme ,confiar en mí ,por quererme y ayudarme siempre a levantar cuando creía que todo estaba perdido. Los amo mucho A mi abuelo Raúl que no pudo ver este sueño hecho realidad. Lo quiero y siempre lo tendré muy dentro de mi corazón. A mi abuela Vida, por toda su paciencia y cariño, su fe, sus años, su vida, dedicada a mí. A Javier que ha sido como un abuelo para mí brindándome su cariño incondicional. A Pedrosito por estar presente en los momentos buenos y malos. A mis amigos muchos que hoy no están cerca de mí pero siempre me brindaron su mano cuando los necesité..
(6) iii. AGRADECIMIENTOS A mi padre y mi madre, por su incondicionalidad, por su esfuerzo para mi educación, porque siempre encuentro en ellos la seguridad y la confianza necesarias para enfrentar los mayores retos, por lo que soy, y lo que quiero ser. A mi abuelo, Raúl, que aunque no me acompañe hoy, siempre vivirá dentro de mí. A mi abuela Vida, por su cariño. A Javier, por su apoyo incondicional. A Juan Pablo Barrios Rodríguez, mi cotutor, por confiar en mí, y por darme las fuerzas y la sabiduría que necesitaba para seguir adelante. A Allen por querer ser mi tutor a la fuerza muchas gracias. A mis amigas, por hacer que los momentos más difíciles se volvieran fáciles, Diana, Irina, Lianet, Lilo, Lorena, Sumito, Lila pila. A mis amigos Aniel, Alain y Pedrosito por ser mis concejeros. A Wendy por brindarme su ayuda incondicional. A mis amigos que estuvieron ahí en muchos momentos difíciles, Oziel, Eduardo, Julio Ernesto, Andrés. A todos los profesores que han contribuido a mi formación profesional en especial a Grettel María, María Isabel, Carlos Alejandro, Roche, Barrios, Bazán, Henry y Carlitos. A los familiares de Anier, Irina, Lilo, Lorena por recibirme en sus casas como si fuese una más de la familia. A todas aquellas personas que de una forma u otra contribuyeron a mi formación profesional o humana..
(7) iv. TAREA TÉCNICA. Para confeccionar el presente trabajo y alcanzar los resultados esperados, fue necesario seguir tareas técnicas que constituyen una guía para llegar al informe final .Ellas fueron:. 1- Identificación de las características principales. de la tarjeta 318 SISTEMA DE. SELECCIÓN DE OBJETOS AÉREOS EN MOVIMIENTO y de los dispositivos lógicos programables 2- Fundamentación de los procedimientos utilizados para realizar el proceso de ingeniería inversa de la tarjeta 318. 3- Descripción de la configuración de FPGA aplicadas en la tarjeta 318 4- Asimilación de la estrategia de diseño para FPGAs con el QuartusII. 5- Confección del informe técnico final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN Debido a la necesidad que tiene las Fuerzas Armadas Revolucionarias de actualizar sus equipos y técnicas, han surgido una serie de trabajos para renovarlos. Con vistas a mantener la seguridad e independencia nacional. Uno de los sistemas que precisa de renovación tecnológica es el Complejo Antiaéreo “Pechora”. Dicho sistema está implementado con electrónica analógica y digital. En el presente trabajo de diploma se explican los principios de funcionamiento del bloque Generador coherente (COHO) y el detector de fase (PH), perteneciente al esquemático principal de la tarjeta T318; a partir de la realización de ingeniería inversa al código fuente presente en el mismo. Para la realización de este trabajo se hizo una investigación de las funciones de la tarjeta T318 dentro del Complejo Pechora. En el desarrollo del trabajo se caracterizó la arquitectura general de los FPGA, y los Lenguajes de Descripción de Hardware (HDL) empleados en la programación de los mismos a partir de la descripción del componente programable de dicha tarjeta, el cual pertenece a la familia Cyclone I de Altera, y la herramienta de ayuda al diseño VLSI digital Quartus II..
(9) vi. TABLA DE CONTENIDOS. AGRADECIMIENTOS ......................................................................................................... iii TAREA TÉCNICA ................................................................................................................ iv RESUMEN.............................................................................................................................. v TABLA DE CONTENIDOS ................................................................................................. vi INTRODUCCIÓN ..................................................................................................................1 CAPÍTULO 1. Características generales de la T318 dentro del complejo Pechora ..............5 1.1. Generalidades de la Estación de Conducción de Artículos ECC S125MIA. Pechora................................................................................................................................5 1.1.1. Dinámica del funcionamiento del complejo coheteríl. .....................................9. 1.2. Funcionamiento de la T318 ....................................................................................14. 1.3. Funcionamiento del SOM ......................................................................................16. 1.4 Arquitectura general de la familia cyclone I de altera ..............................................19 1.5. Detector de fase........................................................................................................20. CAPÍTULO 2. La ingeniería inversa como base de la programación de los FPGA ............23 2.1 2.2 2.3 2.4. Características generales de los FPGA...................................................................23 Estructura del elnguage VHDL empleado en la descripcion del hardware ........24 Lenguaje AHDL utilizado en la programación de FPGA ......................................26 Proceso de ingenieria inversa .............................................................................28.
(10) vii 2.5. Caracteristicas del Quartus II..............................................................................29. CAPÍTULO 3. Obtención de la funcionalidad de bloques esquemáticos del código fuente del componente programable de la T318 ..............................................................................31 3.1. Señales de entrada al FPGA de la tarjeta T318 ......................................................31. 3.1.1. Señales de entrada de frecuencia intermedia a la T318 ..................................34. 3.2. Descripción de bloques lógicos empleados en la T318..........................................36. 3.3. Funcionalidad del generadorcoherente digital .......................................................40. 3.3.1. Funcionalidad del bloque Mixer .....................................................................43. 3.3.2. Funcionalidad del filtro FIR............................................................................45. 3.4. Funcionalidad del bloque PH. Detector de fase digital” ........................................47. CONCLUSIONES Y RECOMENDACIONES ...................................................................51 Conclusiones .....................................................................................................................51 Recomendaciones..............................................................................................................52 REFERENCIAS BIBLIOGRÁFICAS ..................................................................................53 ANEXOS ..............................................................................................................................55 Anexo I. Entidad AD7822 ........................................................................................55. Anexo II. Generador coherente digital ......................................................................55. Anexo III. Mezcladores digitales: DDC .......................................................................57. Anexo IV. Filtro FIR. ....................................................................................................57. Anexo V. Detector de fase. ...............................................................................................57.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN Hoy es una tarea de gran impacto la modernización de los sistemas de combate en nuestro país, pues el desarrollo actual de las Tecnologías de la Información y la Comunicación (TICs) en el mundo, se ha puesto en función de la industria militar y constituye un deber para el estado cubano llevar a cabo esta labor renovadora. Con motivo del análisis de la electrónica digital implementada en una Estación de Vigilancia del espacio aéreo, a partir de la adquisición de varias tarjetas diseñadas con electrónica digital programada, de las cuales hay que obtener su funcionalidad, surge la necesidad de. realizar un trabajo de documentación descriptiva, donde queden planteadas. las principales características y el modo de operación de la nueva tecnología adquirida. Debido a la contribución de la carrera de ingeniería en Telecomunicaciones y Electrónica a la defensa de Cuba, es que se desarrollan trabajos de esta naturaleza. El proceso de realizar nuevos algoritmos a partir de la práctica y el conocimiento que se tiene sobre el funcionamiento de la Estación, aunque se cuenta con suficiente personal preparado resultaría un trabajo de mayor envergadura, pues no existe experiencia alguna sobre el tratamiento digital y programado que se debe realizar para implementar los algoritmos planteados. Cuando se requiere implementar un sistema electrónico, en materia de hardware existen varias opciones. Si el circuito es simple, puede montarse con componentes discretos. En caso de que sea más complejo, esto no resulta una variante factible debido al costo y complejidad que tomaría este. En este caso, la solución más provechosa es su implementación por software, que es mucho más económica y flexible. El diseño y fabricación de un circuito para la realización de funciones específicas es una tendencia que se ha ido abandonando en la electrónica, ya que los dispositivos lógicos programables constituyen una buena oferta para el diseño en un tiempo asombrosamente corto de circuitos electrónicos digitales. Una FPGA (Field Programable Gate Array) es un dispositivo semiconductor que contiene bloques de lógica, cuya interconexión y funcionalidad pueden ser configuradas mediante un lenguaje de descripción especializado (VHDL, AHDL, ABEL, Verilog, etc.). La lógica.
(12) INTRODUCCIÓN. 2. programable puede reproducir desde funciones tan sencillas como las llevadas a cabo por una puerta lógica o un sistema combinacional hasta complejos sistemas en un chip (SOPC) (Bozich, 2005). Altera es uno de los pioneros de la lógica programable, siguiendo a líderes notables anteriores como Signetics y MMI en la introducción de. dispositivos electrónicos.. Actualmente Altera desarrolla algunas características que están orientadas hacia capacidad de sistemas en chips programables (SOPC). Algunos de los ejemplos más recientes incluyen memorias embebidas, procesadores embebidos, y transceptores de alta velocidad. Altera ofrece el software. Quartus II, que es una herramienta CAD dirigido al diseño y. simulación de circuitos lógicos, la cual reúne grandes facilidades, en cuanto a ahorro de tiempo y recursos se refiere, ya que evita el gasto innecesario de componentes a la hora de comprobar un diseño determinado y acelera la puesta en marcha del mismo al ofrecer mediante simulaciones, su funcionamiento evitando llegar a la implementación física del circuito sin antes haber comprobado su correcto funcionamiento. Además este software brinda un ambiente amigable y fácil de trabajar, tanto para el usuario inexperto como para el usuario avanzado (AlteraInc, 2013a). Por las razones mostradas se expone como situación problémica la presencia de los códigos fuentes que están en los componentes programables de la tarjeta 318, de los cuales aún no se ha logrado obtener su funcionalidad. Esto lleva a plantear como problema científico: ¿Cómo conocer el principio de funcionamiento de bloques pertenecientes a la tarjeta T318 del sistema DE SELECCIÓN DE OBJETOS AÉREOS EN MOVIMIENTO utilizando dispositivos lógicos programables? La investigación tiene como objeto de estudio: Analizar la funcionalidad del componente programable montado en la tarjeta 318 para su futura modificación y desarrollo en la DAAFAR. Partiendo del objetivo general se derivan los siguientes objetivos específicos: Describir el funcionamiento del complejo Pechora. Caracterizar los FPGA pertenecientes a la familia Cyclone I de Altera Corporation Asimilar las estrategias de diseño, análisis y simulación de las herramientas de Diseño Asistido por Computador de la firma Altera (Quartus II)..
(13) INTRODUCCIÓN. 3. Aplicar estrategias de trabajo del código fuente perteneciente a las tarjetas 318 mediante la ingeniería inversa. Documentar los módulos de programación hardware de código fuente (tanto en VHDL como AHDL) de bloques pertenecientes a la T318. Determinar la funcionalidad del Heterodino Coherente y Detector de Fase presentes en la T318.. De los objetivos específicos surgen las siguientes interrogantes científicas:. . Qué características poseerán los Lenguajes de Descripción de Hardware utilizados en. la programación de la FPGA? . ¿Qué procedimientos de ingeniería inversa utilizar para obtener la funcionalidad de la. tarjeta T318 a partir del código fuente? . ¿Qué características poseen los FPGA de la familia Cyclone I de la compañía Altera?. . ¿Cuáles son las ventajas que brinda el software Quartus II para realizar la ingeniería. inversa de los sistemas programados? . ¿Cómo realizar la labor de asimilación de tecnología y obtención del funcionamiento. del componente programable FPGA del tipo CYCLONE I (EP1K100QI208) mediante la ingeniería inversa?. El informe se ha estructurado de la siguiente manera: introducción, tres capítulos, conclusiones, recomendaciones, referencias bibliográficas y anexos En el primer capítulo se describen las características generales y el funcionamiento del subsistema electrónico la ECC Pechora, se describe la dinámica del funcionamiento del complejo coheteríl se caracteriza el funcionamiento de la tarjeta T318 y el SOM básico. El segundo programables. capítulo. aborda la ingeniería inversa en dispositivos VLSI digitales. ofreciendo una introducción a los Lenguajes de Descripción de Hardware. (HDL) empleados en la programación de la tarjeta T318 tanto VHDL como AHDL. Además se hace referencia a las características que posee el simulador Quartus II..
(14) INTRODUCCIÓN. En el tercer. 4. capítulo se caracterizan las señales de entrada de la tarjeta; a partir de la. realización de ingeniería inversa al código presente en los bloques esquemáticos implicados en la formación de estas con la herramienta Quartus II..
(15) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 5. CAPÍTULO 1. Características generales de la T318 dentro del complejo Pechora En el presente capítulo se realiza una descripción de las generalidades de la Estación de Conducción de Artículos ECC S125MIA “Pechora. Además se caracterizan los FPGA del tipo Cyclone I de la Compañía Altera de dicho complejo, en las cuales se encuentra programado el hardware encargado de procesar la información. 1.1. Generalidades de la Estación de Conducción de Artículos ECC S125MIA Pechora. La ECC (Estación de Conducción de Artículos) S125MIA se destina para la búsqueda, seguimiento y aniquilamiento de los objetivos aéreos, en los rangos de bajas y medias alturas, tanto de día como de noche y excepcionalmente de los objetivos navales y terrestres, en los regímenes de Radiolocalización o Televisión (Pierrat, 2013). La ECC está compuesta por (Pierrat, 2013): 1. Cabina de dirección, compuesta a su vez por: Dispositivo sincronizador Dispositivo de indicadores. Dispositivo de Dirección de las antenas y las Rampas de lanzamiento (SUPARL). Monitores del Sistema Tele Óptico (STO). Dispositivo de medición de las coordenadas (DDC). Dispositivo de elaboración de los mandos (DEM). Dispositivo Radiotransmisor de los mandos (DTM). Dispositivo de selección de los objetos móviles (SOM)..
(16) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 6. Dispositivo Demodulador de las interferencias. (GSHN). Dispositivo Automatizado de lanzamiento (DAL). Dispositivo de imitación y control. 2. Puesto de antenas compuesto por (Pierrat, 2013): Sistema Transmisor. . Sistema Receptor.. Sistema de Antenas y Guías de ondas (SAGO). Sistema de los Mandos de fuerza de seguimiento sincrónico (MFSS). Cámara del Sistema Tele Óptico (STO). La ECC posee dos canales de trabajo: Radiolocalización y Televisión. En el canal de Radiolocalización. posee dos regímenes de exploración del espacio aéreo: Localización. (LOC) y Acompañamiento (ACOMP), siendo el último el que se emplea para el tiro (Pierrat, 2013). En el régimen LOC se transmiten los impulsos de sondeo y reflejadas. se. reciben las señales. por la antena UV10 (es la antena cuyo reflector es un paraboloide. seccionado con el irradiador ubicado en la prolongación del brazo hacia el frente) cuyo diagrama explora o barre en 10 grados de abajo hacia arriba. En régimen. ACOMP. la. transmisión de los impulsos de sondeo se realiza por la antena UV10, que detienen el barrido de su diagrama y lo convierte en un cono fijo y la recepción se realiza por las antenas UV10, y UV11 (son las antenas que parecen rectangulares y se encuentran inclinadas a los lados de la UV10). Las antenas UV11 desplazan el diagrama direccional, de manera electromecánica en 15 grados. La señal del artículo entra siempre por la UV11 (Pierrat, 2013). El diagrama direccional de las antenas en LOC, explora el espacio. El régimen de LOC se usa para la localización de objetivos aéreos a distancias hasta 80 km, así como.
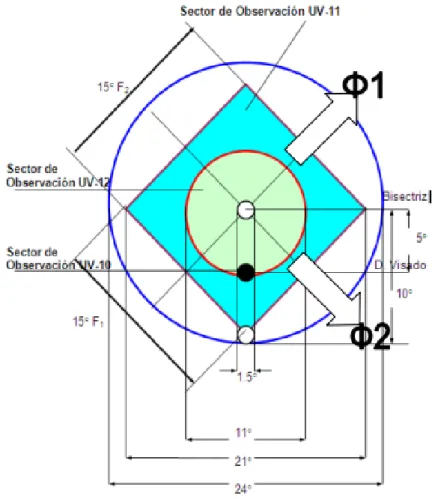
(17) CAPÍTULO 1.. para. la. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. localización. de. objetivos. 7. de superficie (terrestre o marítima) y para la. localización de objetivos portadores del CAR (Cohete Anti Radar)(Pierrat, 2013). Como se puede observar de la figura 1.1, la antena UV10 es transmisora y receptora, moviendo su diagrama direccional (en forma de aguja de 1,5 grados) desde abajo hacia arriba. La antena UV11 es solo receptora moviendo su diagrama direccional en los planos inclinados Ф1 y Ф2, comenzando por Ф1 desde la posición abajo a la izquierda. hasta. la posición arriba a la derecha y luego continúa por Ф2, desde la. posición arriba a la izquierda hasta la posición abajo a la derecha. El sector que cubre el solapamiento por el cruce de los barridos de Ф1 y Ф2 es el sector de exploración de la antena UV11 (cuadrado dibujado en azul)(Pierrat, 2013).. Figura 1.1 Forma de la exploración del espacio(Pierrat, 2013).. El sector que cubre la antena UV12 describe un círculo en el espacio (dibujado en verde). El centro de este círculo se denomina bisectriz del sector de exploración. El.
(18) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 8. centro del barrido que describe la entena UV10 recibe el nombre de directriz del sector de exploración(Pierrat, 2013). En caso de que los blancos sean portadores de interferencias e impidan la localización y el seguimiento del blanco se emplea el canal tele óptico, siempre y cuando el objetivo se pueda ver por este medio. El canal de televisión posee dos regímenes de exploración: Campo visual ancho (Foco F150) 6 grados diagonalmente y Campo visual estrecho (Foco F-500) 2 grados diagonalmente. En F-500 se tiene el diagrama de exploración que se muestra en la figura 1.2, en la parte superior. Se utiliza en los casos de localización de objetivos a distancias mayores de 18 km y para el seguimiento del objetivo durante el tiro(Pierrat, 2013).. Figura 1.2 Canal Tele óptico(Pierrat, 2013).. En F-150 tiene el diagrama de exploración que se muestra en la Figura 1.2, pero en la parte inferior. Se utiliza durante la localización de objetivos a distancias menores de.
(19) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 9. 18 km. El régimen de ACOMP se emplea para el tiro y permite (Pierrat, 2013): Actuar contra objetivos de pequeña SER (Superficie Efectiva de Reflexión). Actuar contra objetivos de grandes dimensiones. Actuar contra objetivos en grupo. Actuar contra objetivos del tipo ADA (Aerostatos Automáticos a la Deriva). Actuar contra objetivos portadores de interferencias activas y pasivas. En régimen de localización, la antena UV10 realiza el movimiento de diagrama de manera continua, y por lo tanto la señal que entra por la antena toma la forma o se modula por dicho diagrama. Esto hace que la forma de la señal, sumando todos los impulsos reflejados y recibidos en la ECC durante cada barrido del diagrama sea acampanada. A esta señal se le da el nombre de “Paquete de impulsos”. Esto mismo ocurre con la señal que se recibe por la antena UV11. En el caso del régimen. de acompañamiento cuando la. antena UV10 detiene el barrido, la señal que se recibe por ésta no está. modulada y su. forma la componen todos los impulsos que se reciben que tienen igual amplitud. A esta señal se le da el nombre de “Fila de impulsos”(Pierrat, 2013). 1.1.1. Dinámica del funcionamiento del complejo coheteríl.. La dinámica de funcionamiento del complejo comienza cuando hay un objetivo violador del espacio aéreo, que es localizado por alguno de los radares de la guardia combativa. A partir de esto el Puesto de Mando de la unidad superior (PM) designa el grupo que debe derribarlo y ordena localizarlo y destruirlo. Una vez transmitidas las coordenadas del objetivo la unidad pasa a “Posición 1”, momento en el cual se conectan la ECC y las RL. La conexión de la ECC se realiza “a distancia”, y durante el tiempo que se realiza el calentamiento los transmisores, se realiza un control de funcionamiento en el cual se comprueba, mirando los indicadores, el trabajo del sincronizador, del SUPA, del DAL, del DDC, del DEM y de parte del DTM (cifrador y descifrador). La presencia de trama en los.
(20) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 10. indicadores significa el buen trabajo del sincronizador; el movimiento de las antenas al mover las manivelas indica el trabajo correcto del SDA-RL; la presencia de las marcas y valores del DAL (Límites de la zona, Punto de encuentro,. Velocidad,. Altura. y. Parámetro) indican un trabajo correcto de este sistema (Pierrat, 2014a). En. la figura 1.3 se muestran los puestos de trabajo de los operadores, significando las. manivelas (volantes) que se emplean en el SUPA para el giro del sistema de antenas y de las Rampas de lanzamiento. Así mismo, el paso a Seguimiento Automático (SA) del objetivo imitado y la captura de los. artículos imitados indican el correcto paso de las. señales por los canales del receptor; la magnitud de los errores y el valor de los mandos de dirección indican el correcto funcionamiento del DDC, del DEM y de parte del DTM. A todo esto se le llama “control funcional de la ECC en baja frecuencia”(Pierrat, 2014a).. Figura 1.3 Manivelas (volantes) del SUPA(Pierrat, 2014a).. Después de transcurrir los 2 minutos de calentamiento de los transmisores aparecen los ruidos en la pantalla de los indicadores señalizando el trabajo de la parte de alta frecuencia de los receptores. A partir de ese momento se considera elevada la alta tensión en los receptores y se puede elevar la alta tensión de los transmisores (Pierrat, 2014a). Cuando se pasa el conmutador “antena – equivalente” a la posición “antena” y se comprueba que aparezcan los objetos locales (señales reflejadas de las lomas, edificios, nubes, etc.) y si hay un objetivo en el aire aparecerá también. Con esto se termina el control de funcionamiento y se informa si el complejo está listo o no para cumplir la misión de.
(21) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 11. combate. Inmediatamente debe recibirse la información sobre las coordenadas del objetivo, desde el PM, que a partir de ahora es un objetivo para el complejo. Con datos anteriores se orientan las antenas hacia la dirección indicada y se. conecta. “antena”, en el régimen de LOC para localizar el objetivo. La localización del objetivo se logra observando los indicadores (los monitores) y tratando de diferenciar los objetos móviles dentro del cúmulo de objetos fijos observados en las pantallas. En la figura 1.4, a la izquierda, se observa una imagen de la pantalla del monitor, estando la ECC en régimen de localización, en la cual se observan las señales reflejadas de los objetos locales (montañas, nubes, edificios, etc.) al irradiar hacia una dirección determinada. Hay que tener en cuenta que la antena UV10 explora de abajo hacia arriba en una magnitud de 10 grados; por lo tanto, en esta imagen, el borde izquierdo del indicador es la parte inferior del barrido (la tierra), y el borde derecho representa la parte superior del barrido. El espacio entre el borde izquierdo y derecho representa los 10 grados de exploración. El espacio longitudinal desde el borde inferior del indicador hasta el borde superior representa la distancia. Hay que notar que en el centro del indicador aparece una marca vertical, la cual coincide con el centro del barrido de la antena UV10, siendo esta la directriz del sector de exploración (Pierrat, 2014a).. Figura 1.4 Señales reflejadas de los objetos (Pierrat, 2014a).. Por ejemplo, la mancha alargada que está en medio de la imagen de la izquierda quiere decir que hay un gran objeto, muy parecido a un barco que se encuentra a una distancia.
(22) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 12. dada. Hay que notar que ese objeto coincide con la línea de objetos locales que coincide con la superficie del terreno (Pierrat, 2014a). La imagen de la derecha, en la misma figura 1.4, es algo similar pero en régimen de acompañamiento y por el plano Ф2. En este caso el espacio entre los bordes derecho e izquierdo de la pantalla representa la exploración por ese plano que es de 15 grados. El espacio entre los bordes inferior y superior sigue siendo aquí la distancia. En este caso la marca vertical no aparece en el centro del indicador, sino desplazada hacia la derecha, lo que es típico en la exploración por el plano Ф2. Para este plano la marca representa la directriz del sector y por la forma del barrido la parte derecha del indicador está relacionada con el terreno. Si la presencia de los objetos locales afecta a la detección de los objetivos o existen interferencias pasivas lanzadas por el enemigo (objetos metálicos muy pequeños y en grandes cantidades que flotan en el aire y reflejan las OEM) entonces se conecta el dispositivo SOM (T318) para eliminar los objetos inmóviles y detectar con mayor facilidad los objetivos. Cuando se localiza al objetivo se pasa al régimen de Acompañamiento por “Seguimiento manual” (SM) por los operadores Ф1, Ф2 y Distancia. Si el seguimiento es estable y si no tiene interferencias se pasa a “Seguimiento automático con acompañamiento manual” (SA-AM) o “Seguimiento automático con acompañamiento automático” (SAAA). Seguidamente se conecta el DAL, implementado en la Computadora, y se observan los datos de Velocidad (V), altura (H) y Parámetro (P), de vuelo del objetivo con relación a la ECC; esto es, para escoger el método de conducción teledirigida del artículo y escoger el método de accionamiento de la carga de combate. También se observan las marcas del DAL y cuando la marca de “Distancia hasta el Punto de Encuentro” (PE) esté dentro del espacio limitado por la marca de “Distancia hasta el Límite Lejano”(Pierrat, 2014a) (LL) y por la marca de “distancia hasta el Límite Cercano” (LC), se procede a informar que el objetivo está en “Zona de Lanzamiento” y se espera por la orden de fuego. La Figura 1.5 muestra uno de los indicadores (monitores) desde donde se realiza la localización, el seguimiento de los objetivos y el tiro. Es de notar que en la parte superior del monitor se muestran los datos más significativos del DAL(Pierrat, 2014a)..
(23) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 13. Figura 1.5 Indicadores (monitores)(Pierrat, 2014a).. En la Figura 1.6 se muestra el esquema funcional de la ECC S125MIA “Pechora” En este esquema se muestran los diferentes dispositivos que componen la ECC S125MIA señalando las tarjetas que realizan las funciones en dichos dispositivos.. Figura 1.6. Esquema funcional ECC Pechora (Pierrat, 2013)..
(24) CAPÍTULO 1.. 1.2. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 14. Funcionamiento de la T318. Como se observa en la Figura 1.7 de la tarjeta en ella hay 3 componentes programables FPGA del tipo CYCLONE I (EP1K100QI208). En cada uno de estos componentes está programado el hardware que realiza las funciones de cada parte del sistema. Así mismo hay otros componentes que no están programados y que se encargan de la parte analógica y de las entradas y salida; entre estos componentes se encuentran los conversores A/D y D/A, algunos filtros analógicos de entrada y salida, y amplificadores de video (Pierrat, 2014b).. Figura 1.7.Imagen frontal de la tarjeta T318 (Pierrat, 2014b).. El esquema funcional del sistema implementado en la Tarjeta 318 se muestra en la Figura 1.8..
(25) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 15. Figura 1.8. Diagrama general de T318 (Pierrat, 2014b).. Las señales de entrada a la tarjeta son: la tensión de la compensación de la velocidad del viento; la muestra del impulso de sondeo desde el transmisor; y la señal (impulso) reflejada de los objetos cuando a ellos llega cada impulso de sondeo. Este esquema funcional responde al trabajo del Sistema o Dispositivo Selector de Objetos Móviles (o eliminador de objetos inmóviles), basado en el principio de que desde el receptor llegan las señales de entrada al sistema por dos vías, por una llega la señal que trae la muestra de la fase (impulso de faseo) del impulso que envía el transmisor al espacio (impulso de sondeo), por la otra vía llega la señal reflejada en el objeto que se encuentra en el espacio (como resultado del reflejo del impulso de sondeo en dicho objeto). Hay que tener presente que el impulso de sondeo emitido por el transmisor puede reflejarse en objetos aéreos (nubes, naves aéreas, zonas de intensa lluvia, etc.) y en objetos terrestres y marítimos (montañas, torres, antenas, chimeneas, naves marítimas, etc.). De acuerdo a las características del objeto así serán las características de su señal reflejada (Pierrat, 2014b). En el multiplicador se obtiene una mezcla de las frecuencias de las dos señales y se selecciona la componente armónica que plantea la resta de las fases entre ellas, con lo que se obtiene una señal de amplitud constante si el objeto es inmóvil o una señal de amplitud variable si el objeto es móvil. Esta señal de salida se aplica al esquema de resta (que puede tener diferentes configuraciones) donde la resta la señal con ella misma retardada en un.
(26) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 16. período de los impulsos o múltiplo de este período, elimina las señales de los objetos inmóviles. La señal de salida de la T318 es la señal reflejada desde el objeto que es móvil, que luego de ser procesada por el sistema no es eliminada (Pierrat, 2014b). 1.3. Funcionamiento del SOM. La parte del transmisor y el receptor garantizan la eliminación de los objetos inmóviles. El esquema en bloques de este sistema se muestra en la figura 1.9:. Figura 1.9 Parte del transmisor y el receptor que garantizan la eliminación de los objetos Inmóviles(Pierrat, 2014c).. Puede suceder que aumente o disminuya la velocidad radial hasta tal valor, en el cual, la frecuencia de modulación coincida con el período de los impulsos o sea un múltiplo de este, provocando que la amplitud de los mismos se mantenga constante, estando el objeto en movimiento. Al valor de la velocidad radial para el cual los impulsos de salida del DF se obtienen con amplitud constante se le llama “Velocidad radial ciega”. Este es un fenómeno que se presenta en los sistemas de eliminación de los objetos inmóviles que hay que tener presente (Pierrat, 2014c). Una vez que la señal está a la salida del detector de fase ya se tiene la información de si es la reflejada de un objeto inmóvil o si es de uno que se encuentra en movimiento. De aquí en adelante solo hay que estructurar la forma de eliminar los objetos inmóviles. La manera más común de eliminar los impulsos de las señales que so. inmóviles es mediante un. esquema de resta que reciba la señal actual y esa misma señal retardada en uno o más.
(27) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 17. períodos. Es obvio que si la señal es de un objeto inmóvil, sus impulsos tienen una misma amplitud en todos los períodos y el resultado de la resta los anula. Esta idea se muestra en la figura 1.10 (Pierrat, 2014c):. Figura1.10 Esquema de resta y retardo de la señal(Pierrat, 2014c).. Para el funcionamiento del Selector de Objetos Móviles (eliminador de objetos inmóviles) solo queda realizar un esquema en bloques, como continuación del esquema mostrado en la primera figura, de las partes funcionalmente necesarias de este sistema. El bloques de este sistema es el siguiente (Figura 1.11):. esquema en.
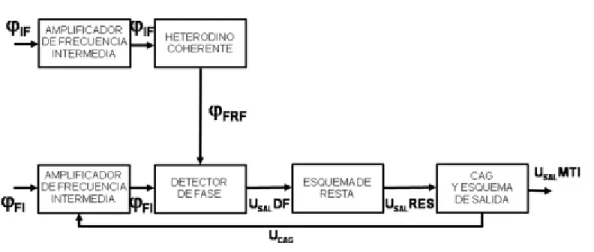
(28) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 18. Figura 1.11. Esquema en bloque del selector de Objetos Móviles (Pierrat, 2014c).. El funcionamiento del sistema, por su esquema en bloques, es el siguiente: desde el receptor llegan las señales de entrada al sistema por dos vías, por una llega la señal que trae la muestra de la fase (impulso de faseo) del impulso que envía el transmisor al espacio (impulso de sondeo), por la otra vía llega la señal reflejada en el objeto que se encuentra en el espacio (como resultado del reflejo del impulso de sondeo en dicho objeto).Hay que tener presente que el impulso de sondeo emitido por el transmisor puede reflejarse en objetos aéreos (nubes, naves aéreas, zonas de intensa lluvia, etc.) y en objetos terrestres y marítimos (montañas, torres, antenas, chimeneas, naves marítimas, etc.). De acuerdo a las características del objeto así serán las características de su señal reflejada. La fase del impulso de faseo, que la da el transmisor, se impone en la fase de la señal que genera el heterodino coherente, lo que se toma como fase patrón. Al detector de fase le llega por una parte la señal reflejada del objeto, con su respectiva fase afectada o no por el efecto doppler, y por la otra le llega la generación patrón del heterodino coherente que trae la fase inicial del impulso de sondeo. En el detector de fase se comparan las fases de ambas entradas y a la salida se obtiene una señal de amplitud constante si el objeto es inmóvil o una señal de amplitud variable si el objeto es móvil. La señal de salida del detector de fase se aplica al esquema de resta (que puede tener diferentes configuraciones) donde se resta la señal con ella misma retardada en un período de los impulsos o múltiplo de este período. Al final, lo que se obtiene en el esquema de resta se amplifica para su envío a los monitores y se emplea además para.
(29) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 19. formar la señal de control automático de ganancia, que acciona en los amplificadores de frecuencia intermedia, estabilizando la amplitud de la señal de salida del sistema (Pierrat, 2014c). 1.4 Arquitectura general de la familia cyclone I de altera Las FPGAs Cyclone. utilizan tecnologías de 0.13µm con densidades de hasta 20,060. elementos lógicos (LEs, Logic Elements) y hasta 288 Kbits de RAM.. Los dispositivos. Cyclone contienen una arquitectura basada en fila y 79 columnas de dos dimensiones para implementar lógica.. Las. interconexiones columna y fila de distintas velocidades. proporcionan señales de interconexión entre los LABs y los bloques integrados de memoria. El arreglo lógico está constituido por LABs, con 10LEs en cada LAB. Un LE es una unidad pequeña de lógica que proporciona una aplicación eficaz de funciones lógicas (AlteraCorporation, 1996). Los LABs se agrupan en filas y columnas a través del dispositivo. Los dispositivos Cyclone tienen entre 2910 a 20060 LEs. Los bloques M4K RAM son los verdaderos bloques de memoria de doble puerto con 4K bits de memoria más la paridad (4608 bits). Estos bloques proporcionan memorias de doble puerto especializado, doble puerto simple, o de un puerto de hasta 36 bits de ancho llegando a los 200 MHz. Estos bloques se agrupan en columnas a través del dispositivo entre ciertos LABs (Chan and Mourad, 1994). Los dispositivos Cyclone ofrecen entre 60 y 288 Kbits de RAM integrada. Cada pin E/S del dispositivo Cyclone es alimentado por un elemento de E/S (IOE) ubicado en los finales de las filas y columnas del LAB, alrededor de la periferia del dispositivo. Cada IOE contiene un buffer de E/S bidireccional y tres registros para registrar señales de entrada, de salida, y señales de habilitación de salida. Los dispositivos Cyclone proporcionan una red de reloj global y hasta dos PLL’s (AlteraCorporation, 2010). La red de reloj global consiste en ocho líneas de relojes globales que recorren el dispositivo entero. La red de reloj global puede proveer a relojes a todos los recursos dentro del dispositivo, como IOEs, LEs, y bloques de memoria. Las líneas de relojes globales también pueden usarse para señales del control (Sisterna, 2011)..
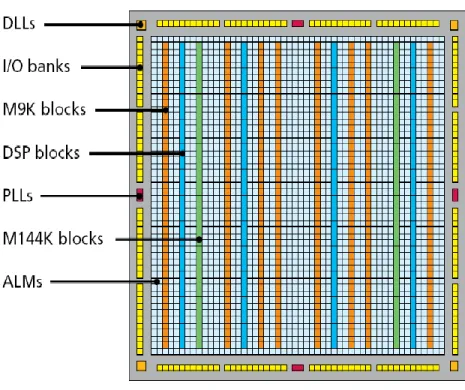
(30) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 20. La arquitectura del FPGA Cyclone I presenta un diseño bidimensional compuesto por filas y columnas entre los cuales están los arreglos de bloques lógicos. La disposición de los componentes se puede observar bloques de memoria, multiplicadores embebidos, los PLL’s, los arreglos lógicos y los bloques de entrada/salida (Input/Output Element, IOE). Por lo tanto, estos dispositivos están compuestos por arreglos de bloques lógicos (LAB’s), bloques de entrada/salida (IOEs), PLL’s, memorias y multiplicadores Figura (1.12) (Altera Corporation, 2010). Figura 1.12. Estructura y componentes de un FPGA de la empresa Altera(Sisterna, 2011).. 1.5. Detector de fase. Un detector de fase es un circuito mezclador de frecuencias o multiplicador analógico que genera una señal de voltaje que representa la diferencia en fase entre dos señales de entrada. Es un elemento esencial en el Lazo de seguimiento de fase (PLL, siglas en inglés de phase locked loop) (Rabinovich, 2003 )..
(31) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 21. Detecta la diferencia en fase de dos señales periódicas, una señal periódica está caracterizada por tener amplitud, factor de forma, frecuencia y fase, siendo ésta última la que es detectada por este dispositivo. Este dispositivo por lo general es una fuente de corriente, la corriente sale o entra del dispositivo dependiendo del resultado de la diferencia entre las fases de las entradas, es decir la corriente puede ser positiva o negativa, lo cual es una indicación de cual señal está adelantada o atrasada respecto de una referencia de tiempo dada. Este dispositivo forma parte de un sistema denominado PLL por sus siglas en inglés (Phase Locked Loop) o lazo de seguimiento de fase, en este sistema(figura 1.13) es el punto de comparación con una señal de entrada que sirve como referencia cuya frecuencia debe ser seguida por este sistema(Rabinovich, 2003 ).. Figura 1.13. Diagrama esquemático de un lazo de fijación de fase.(Miyara, 2005). El comparador de fase produce, idealmente, una señal KD⋅∆ϕ proporcional a la diferencia de fase entre la señal de entrada v1 y la señal v2 generada por el oscilador controlado por tensión (VCO, siglas en inglés de voltage-controlled oscillator) que, amplificada por el amplificador, se aplica a la entrada vc del VCO. Este último produce una frecuencia f2 que varía linealmente con vc (Miyara, 2005). La situación de equilibrio se alcanza cuando la señal KD⋅∆ϕ. amplificada por el. amplificador es tal que, aplicada al VCO, hace que éste oscile exactamente a la misma frecuencia que la entrada. En efecto, si fuera, por ejemplo, f1 > f2, la diferencia de faseiría en aumento, lo cual haría que f2 aumentara, tendiendo a acercarse a f1; y a la inversa si f1 < f2 (Miyara, 2005). Un tipo de detector de fase puede ser la compuerta X OR (or exclusiva) la cual por su tipo de funcionamiento es una opción muy buena. Existen varios tipos de detectores de fase para.
(32) CAPÍTULO 1.. CARACTERISTICAS GENERA LES DE LA T138 DENTRO DEL COMPLEJO PECHORA.. 22. la construcción de PLL, la elección de cuál emplear estará determinado por la aplicación en cuestión(Miyara, 2005).
(33) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 23. CAPÍTULO 2. La ingeniería inversa como base de la programación de los FPGA En el presente capítulo se explican algunos procedimientos utilizados para la realización de ingeniería inversa de software, tales como la reestructuración y la redocumentación del código, se caracterizan los lenguajes de descripción de hardware prestando especial atención a las particularidades del AHDL y VHDL; lenguajes empleados en la implementación de los códigos pertenecientes al componente programable de dicha tarjeta. Además, se ofrece una introducción al software Quartus II, simulación en el proceso de. el cual se ocupa de la. ingeniería inversa al código fuente del FPGA de la tarjeta. T318. 2.1 Una. Características generales de los FPGA FPGA (del inglés field Programmable Gate Array) es un dispositivo semiconductor. que contiene bloques de lógica cuya interconexión y funcionalidad puede ser configurada mediante. un. lenguaje. de. programable aquel circuito. descripción. especializado.. Se. entiende. por. dispositivo. de propósito general que posee una estructura interna que. puede ser modificada por el usuario final (o a petición suya, por el fabricante) para implementar una amplia gama de aplicaciones. La lógica programable puede reproducir desde funciones tan sencillas como las llevadas a cabo por una puerta lógica o un sistema combinacional hasta complejos sistemas en un chip (circuito integrado) (Sisterna and Lipari, 1997) Las FPGA, son el dispositivo programable por el usuario de más general espectro. También se denominan LCA (Logic Cell Array). Consisten en una matriz bidimensional de bloques configurables. En el nivel más alto, los FPGAs son chips de silicio reprogramables. Al utilizar bloques de lógica programables,. se. pueden. configurar. pre-construidos y recursos para ruteo. estos chips para implementar funcionalidades. personalizadas en hardware, solo desarrollando tareas de cómputo digital en software y compilándolas en un archivo de configuración o bitstream que contenga información de cómo deben conectarse los componentes. Además, los FPGAs son completamente.
(34) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 24. reconfigurables y al instante toman una nueva “personalidad” cuando se compila una diferente configuración de circuitos(LÓPEZ and AYALA, 2004). Un FPGA consiste en arreglos de varios bloques programables (bloques lógicos) los cuales están interconectados entre sí a través de canales verticales y horizontales, y cuenta además con bloques de entrada/salida (Figura 2.1). En general, se puede decir que posee una estructura bastante regular, aunque el bloque lógico y la arquitectura de interconexión varía de un fabricante a otro (Maxfield, 2004).. Figura 2.1 Arquitectura básica de un FPGA (Bozich, 2005).. 2.2. Estructura del elnguage VHDL empleado en la descripcion del hardware. En la actualidad, el lenguaje de descripción en hardware más utilizado a nivel industrial es VHDL (Hardware Description Language), que apareció en la década de los ochenta como un lenguaje estándar, capaz de soportar el proceso de diseño de sistemas electrónicos complejos, con propiedades para reducir el tiempo de diseño y los recursos tecnológicos requeridos (SUARDÍAZ, 2003)..
(35) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 25. VHDL es un lenguaje portable y eusable ya que es independiente de la tecnología o el fabricante. (Xilinx,. Altera,. Actel, QuickLogic, etc.). Sus sentencias a diferencia de un. programa de software se ejecutan. inherentemente en forma “concurrente” salvo aquellas. que se incluyan dentro de un Proceso (Process) donde se ejecutarán en forma secuencial(Betz, 2010). Una vez introducida la necesidad de diseñar utilizando lenguajes HDL y todo lo que ello significa nos decantamos por presentar el VHDL como lenguaje de diseño. Existen varias cuestiones previas que hay comentar antes de iniciar la exposición forma del lenguaje. Primeramente, el VHDL es un lenguaje en el que se define el sentido del flujo de las señales, es decir, una señal es de entrada y/o salida definida en el código, no por la evolución de la señal en sí misma. La importancia de este comentario radica en que el nivel de descripción más bajo que podemos alcanzar en VHDL es el nivel de puerta lógica, y no de transistor. Por ejemplo, para representar un switch en VHDL se ha de incluir una subrutina de cerca de 750 líneas de código, ineficiente a todas luces. En Verilog esto está bien resuelto por comando switch(Betz, 2010). En segundo lugar, el VHDL no es sensible a mayúsculas y minúsculas, por tanto la señal PEPE es igual a la señal PePe y a su vez a la señal pepe. Los comentarios son solamente de línea y van marcados por dos signos menos (Chu, 2008): --Esto es un comentario en VHDL El lenguaje VHDL está dotado de muy pocos recursos inicialmente, de pocas funciones y tipos de variables. Para darle mayor versatilidad es preciso utilizar librerías estándar que le dotan de mucha mayor potencia para representar comportamientos digitales. Dejaremos a capítulos posteriores la formalización de esta idea. El mecanismo para realizar la síntesis de un diseño descrito en VHDL se realiza, de modo estándar utilizando una librería de compilación donde se ubican los modelos de referencia, que físicamente es un subdirectorio en el directorio de diseño. Esta librería de modelos, por defecto se suele llamar WORK. Ampliaremos esta idea en el apartado referido a librerías. Estructura de un diseño VHDL.
(36) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 26. Una de las grandes aportaciones de los lenguajes HDL, como se expuso en el capítulo 1, es la posibilidad de organizar jerárquicamente los diseños, de tal manera que cada elemento, junto con los elementos de inferior nivel jerárquico, es en sí mismo un diseño auto contenido. En consecuencia cada unidad en la jerarquía tiene entidad como circuito, con entradas, salidas y funciones (Güichal, 2005). La unidad jerárquica en cuestión es designada por la palabra reservada entity o entidad. La entidad tiene asociado un nombre identificador usualmente relativo a la función que realiza. Cada vez que hagamos uso de este circuito utilizaremos el nombre asociado. Asimismo está definida por señales de enlace con el exterior y una arquitectura funcional. El VHDL ha previsto la posibilidad de modelar diferentes arquitecturas para una misma entidad de ahí que haya que asignar nombres tanto a la entidad como a la arquitectura. Asimismo dispone de un mecanismo para poder acceder de forma automática a las diferentes arquitecturas de una misma entidad desde una entidad de orden jerárquico superior (Maxinez and Jara, 2002). 2.3. Lenguaje AHDL utilizado en la programación de FPGA. Altera Hardware Descripción Lenguaje (AHDL), es un lenguaje de descripción de hardware (HDL), de alto nivel, desarrollado por la compañía Altera. El mismo está pensado para el diseño de lógica combinacional compleja, operaciones de grupo, máquinas de estado,. tablas de verdad, y lógica parametrizada (ALTERA_CORPORATION, 2006).. AHDL, al igual que otros HDLs utiliza ecuaciones lógicas, variables, constantes, funciones, operadores aritméticos, tablas de verdad y expresiones condicionales. Es un lenguaje modular y concurrente (Cheng, 1998). Se puede utilizar cualquier editor de texto para crear archivos de diseño de texto en AHDL (.tdf), las únicas restricciones de que estos ficheros deben guardarse con la extensión ya mencionada y que las líneas no deben exceder los 255 caracteres. Estos archivos pueden compilarse para crear archivos de salida para usar en el proceso de simulación, análisis de temporización. (timing. analysis). y. la. programación. de. dispositivos.. (ALTERA_CORPORATION, 2006)AHDL no es case sensitive (no diferencia entre mayúsculas y minúsculas)..
(37) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 27. Un archivo .tdf presenta una estructura determinada por once secciones. De estas secciones, solo dos son imprescindibles y el resto son opcionales, esto no significa que no sean necesarias. A continuación se mencionan las mismas y se da una breve descripción de cada una (Cheng, 1998). La sección TITULO es un campo opcional, único, que no afecta a la descripción del hardware. Permite incorporar comentarios que luego serán incorporados al reporte de compilación. Tributa a la documentación del diseño (Pierrat, 2012). AHDL permite la descripción del hardware a través de su comportamiento (behavior), en lugar de hacerlo a través de un circuito. Usa ecuaciones lógicas, variables, constantes, funciones, operadores aritméticos, tablas de verdad, y expresiones condicionales, en forma similar a la de un lenguaje de software de alto nivel. Usa un archivo de texto, de extensión .tdf. Está especialmente orientado para definir máquinas de estado de gran complejidad. Toda la descripción del comportamiento es resuelta en forma concurrente.. Algunos de los recursos utilizados por AHDL son (Noriega, 2008): Palabras. reservadas: Como en todo lenguaje de descripción de hardware, AHDL. tiene una serie de palabras reservadas, que no son más que palabras o identificadores que tiene un significado particular para el lenguaje. Los ejemplos más clásicos serían las palabras usadas en construcciones de flujo de control, tales como if, then, y else, presentes en casi todos los lenguajes de programación. Es necesario hacer esta aclaración ya que las palabras reservadas no pueden usarse como nombres de variables, constantes o funciones. De violar este principio, con seguridad, el hardware en cuestión no se programará correctamente. Operadores y otros símbolos: Los operadores son aquellos símbolos que indican algún tipo operación o acción. A pesar de que pueden clasificarse en muchas.
(38) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 28. categorías, las dos más comunes y más usadas son los operadores lógicos y matemáticos. Puertos, grupos y números: Se entienden como puertos en AHDL a las variables presentes en las entradas y salidas de primitivas o macrofunciones (Pierrat 2012). También reciben esta denominación, aquellos puertos destinados a la entrada y salida de señales procedentes de los pines de la FPGA. Existen varios puertos, entre ellos es necesario destacar los que siguen 2.4. Proceso de ingenieria inversa. La ingeniería inversa (disección de productos) es una metodología de rediseño. Esto significa que es un proceso de diseño que puede ser aplicado a un producto existente, a un prototipo o un concepto detallado. Este es un proceso que utiliza una variedad de técnicas en forma de modelos, esquemas, pautas y teorías normativas para diseccionar y entender completamente un producto. Formulada concisamente, la ingeniería inversa inicia el proceso de rediseño de un producto, donde este es observado, desensamblado, analizado y documentado. en. términos. de. su. funcionalidad,. forma,. principios. físicos,. manufacturabilidad y ensamblabilidad. La intención inicial de este proceso es entender y representar completamente el estado actual del producto (Aguirre, 2013). Su mayor uso se ve los casos que (Ameneyro, 2012): No existe documentación o la misma está obsoleta. Se haya realizado la programación en bloque de códigos muy grandes y/o sin estructurar. No existe documentación interna en los programas, o es incomprensible o está desfasada. Se prevé que la aplicación pueda tener aún larga vida. La disección de productos y el benchmarking son procedimientos comúnmente empleados en la industria para mejorar el diseño de un producto y para producir una calidad de desempeño superior. Cuando se aplican adecuadamente en la universidad en las carreras de.
(39) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 29. pregrado, estos procedimientos puede mejorar el proceso de la enseñanza del diseño de ingeniería (Cajaraville et al., 2008). Aunque la ingeniería inversa es extensamente utilizada para propósitos de rediseño, puede también ser utilizada por otras razones, al menos cinco posibles motivaciones detrás de la ingeniería inversa de un producto son: (1) Benchmarking, (2) evaluación y estudio crítico del producto de un competidor, (3) mejoramiento de la calidad, (4) reducción de costos, y (5) simplemente para entender su funcionamiento.. A menudo la ingeniería inversa es. utilizada para estudiar el producto de un competidor por razones diferentes al benchmarking, como por ejemplo para determinar si se ha violado alguna patente, o si se tiene interés en clonar o modificar un producto o su aspecto para uso propio. Otro incentivo para realizar ingeniería inversa a un producto es la valoración de mejoras en la calidad o reducción de costos; estas evoluciones pueden ser: a) al nivel de subsistema, b) configuración, c) componente o d) perimétrico. Una última posible motivación para realizar un proceso de ingeniería inversa a un producto puede ser solo para entenderlo. La ingeniería inversa involucra el metódico desarme y ensamble de un dispositivo, teniendo cuidado de documentar, evaluar, y reportar sobre el estudio de su función; como valor agregado de este proceso se desprenden las modificaciones o mejoras que se le hagan al dispositivo como resultado del ejercicio(López, 2010). 2.5. Caracteristicas del Quartus II. Anteriormente solo los ingenieros con un profundo entendimiento de diseño de hardware digital podían trabajar con la tecnología FPGA. Sin embargo, el aumento de herramientas de diseño de alto nivel está cambiando las. reglas de programación de las FPGAs, con. nuevas tecnologías que convierten los diagramas a bloques gráficos, o hasta el código ANSI C a circuitos de hardware digital (AlteraInc, 2013a). Quartus II es una herramienta de software producida por Altera para el análisis y la síntesis de diseños realizados en HDL. Este software brinda un ambiente de diseño multiplataforma que se adapta con facilidad a las necesidades del diseñador, brindando grandes facilidades en el diseño de sistemas SOPC (system-on-a-Programmable-chip). Quartus II incluye soluciones para cada una de las fases de diseño de FPGAs, CPLD Puede añadir tantos acápites como le sean necesarios (Pressman, 2003)..
(40) CAPÍTULO 2. LA INGENIERIA INVERSA COMO BASE DE LA PROGRAMACION DE LOS FPGA. 30. El Quartus II es una herramienta permite la creación de un circuito digital a partir de su descripción gráfica. o a partir de una descripción HDL, admitiendo. llegar. hasta la. implementación física del diseño en un dispositivo comercial programable del fabricante Altera. El flujo básico de un proceso de este tipo, figura 2.2, comienza con la creación de un nuevo proyecto basado en un modelo descriptivo como se mencionaba anteriormente, sobre el cual se realizan un grupo de asignaciones dependiendo de las características de la aplicación, luego el programa realiza una compilación, que permite un análisis posterior de los resultados, posibilitando que estos sean perfeccionados con la meta de optimizar el producto final. Su empleo ha sido de gran utilidad para analizar el código fuente del dispositivo Cyclone II EP2C70F896C8, tarea que recoge el contenido principal de la investigación.. Figura 2.2 Flujo de diseño básico del software Quartus II (AlteraInc, 2013a)..
(41) CAPÍTULO 3. OBTENCIÓN DE LA FUNCIONALIDA D DE BLOQUES ESQUEMÁTICOS DEL CÓDIGO FUENTE DE LA T318. 31. CAPÍTULO 3. Obtención de la funcionalidad de bloques esquemáticos del código fuente del componente programable de la T318 En el presente capítulo se describen de forma general los bloques que contiene el diseño esquemático principal de la tarjeta T318. También se hace un análisis de los principios de funcionamiento del bloque generador coherente (COHO) y el detector de fase (PH), a través de la realización de la ingeniería inversa del código presente en dicho bloque. Para que la tarjeta T318 pueda ejecutar todas sus funciones necesita señales de entrada que de acuerdo a su contenido, realizan una acción u otra en determinado bloque. También necesita diferentes señales de reloj que son empleadas para generar los sincronismos de los procesos. Seguidamente se realizará una breve descripción de cada uno de estos bloques. 3.1. Señales de entrada al FPGA de la tarjeta T318. La T318 tiene dos conectores: El Xp1 para señales de entrada y salida y el Xp2 para los voltajes de la fuente de alimentación (+12v, -12v, +5v y Tierra).Las señales que entran y salen por el conector Xp1, que se muestran en la FIGURA 3.1, se describen de la manera siguiente(Pierrat, 2014c):.
(42) CAPÍTULO 3. OBTENCIÓN DE LA FUNCIONALIDA D DE BLOQUES ESQUEMÁTICOS DEL CÓDIGO FUENTE DE LA T318. 32. Figura 3.1 Conector Xp1 de la T318(Pierrat, 2014c).. Video señal SOM (punto 6de Xp2). Esta es la señal de salida del SOM, que se envía hacia la tarjeta distribuidora de señales (T316). Desde esta última tarjeta se distribuyen las hacia los sistemas de coordenadas (T223),hacia los monitores (T424)y hacia la computadora de control (T101-T102)(Pierrat, 2014c). Blanqueos (puntos 3 y 4 de Xp2). Estos son impulsos de período angular (período del orden de los milisegundos),. sincrónicos con el desplazamiento. del diagrama direccional (barrido) de la antena UV11 por los planos F1 y F2, y representan el intervalo de paso inverso del barrido por cada plano(Pierrat, 2014c). Impulsos selectores (punto 11 de Xp2). Estos son un grupo de impulsos que, por ángulo coinciden con la posición de la marca vertical, y por distancia coinciden con la posición de.
(43) CAPÍTULO 3. OBTENCIÓN DE LA FUNCIONALIDA D DE BLOQUES ESQUEMÁTICOS DEL CÓDIGO FUENTE DE LA T318. 33. la marca horizontal. Se elaboran para permitir, en el receptor, el paso de la señal que se encuentra encentrada por ángulo y por distancia, para efectuar con ella el seguimiento automático.. Los impulsos selectores por distancia tienen el período de repetición de los. impulsos de sondeo y una duración de 0.5uS. Estos impulsos selectores por distancia solo se elaboran en el intervalo en que están presente los impulsos selectores angulares por F1 y por F2; es decir, que los impulsos angulares están presentes en un intervalo de tiempo que cubre 3.6 grados angulares, coincidiendo con la marca vertical (directriz) por cada uno de los planos, que divide dicho impulso selector en dos partes de 1.8 grados(Pierrat, 2014c). Conexión “Antena-Imitador” (punto 10 de Xp2). Este es un mando de 5v que surge en un interruptor del armario 2, e indica que se está trabajando con los impulsos angulares (blanqueos y directrices de la exploración) emitidos por el mecanismo de exploración de la antena UV11 (en el caso de “Antena”) o emitidos por el imitador de estos impulsos que se encuentra implementado en el sistema sincronizador (T221)(Pierrat, 2014c). Ro1 UK (punto 2 de Xp2). Este es un impulso de distancia (sincrónico con los impulsos de sondeo). Este impulso se adelanta al impulso emitido al espacio por el transmisor, ya que se emplea para garantizar su formación y también para sincronizar el osciloscopio cuando se quiere ver la muestra del. impulso emitido al espacio por el transmisor denominado. “Impulso de faseo del SOM”(Pierrat, 2014c). Conexión SOM I (punto 9 de Xp2). Este mando, que surge en un interruptor del armario 3 que tiene tres posiciones: “SOM I”-“Desconectado”-“SOM II”. La presencia del mando SOM I a la entrada de la T318 indica que el SOM debe trabajar con una sola etapa de resta. El SOM, aunque no esté conectado (posición del interruptor en “Desconectado”), está funcionando y le llegan las señales a su entrada. Siempre el SOM está trabajando con dos etapas de resta a no ser que le esté llegando el mando conexión SOM I. SOM I se emplea cuando la señal de radiolocalización que entra por la antena contiene objetos locales que impiden observar y acompañar el objetivo. SOM II se emplea cuando hay más complejidad en la señal de radiolocalización; es decir, que hay objetos locales y además, interferencias pasivas lanzadas por el enemigo, y también nubes(Pierrat, 2014c)..
(44) CAPÍTULO 3. OBTENCIÓN DE LA FUNCIONALIDA D DE BLOQUES ESQUEMÁTICOS DEL CÓDIGO FUENTE DE LA T318. 34. Tensión de compensación del viento (punto 1 de Xp2). Esta es una tensión (0 – 5v) que llega desde un potenciómetro ubicado en el armario 3 y se emplea para eliminar los objetos que tienen pequeña velocidad, como las nubes, que se mueven producto a la velocidad del viento. Estos objetos tienen una velocidad radial muy pequeña y el SOM los considera como objetos móviles y no se eliminan. Entonces para ellos existe esta alternativa; o sea, con la Tensión de compensación del viento se varía la frecuencia del generador coherente en un pequeño rango, y como esta frecuencia es la que se emplea para la comparación con la frecuencia que trae la señal reflejada en los objetos (la nubes que se mueven), es posible igualar la del generador coherente con la de los objetos y como resultado eliminar dichos objetos. De esa forma se despeja en los monitores la imagen de radiolocalización afectada por la presencia de las señales de los objetos inmóviles(Pierrat, 2014c).. 3.1.1. Señales de entrada de frecuencia intermedia a la T318. Además de los conectores ya explicados hay tres conectores más que son del tipo coaxial, con cables de 75Ω, por donde llegan las señales de frecuencia intermedia (FI).Esto se puede ver en el segmento del esquema electrónico de la T318 que se muestra en la figura 3.2(Pierrat, 2014d)..
(45) CAPÍTULO 3. OBTENCIÓN DE LA FUNCIONALIDA D DE BLOQUES ESQUEMÁTICOS DEL CÓDIGO FUENTE DE LA T318. 35. Figura 3.2 Entradas de FI a la T318(Pierrat, 2014d).. Por el conector coaxial XRJ1 llega el “impulso de faseo” desde el transmisor del Puesto de antenas. El recorrido por la parte de alta frecuencia de este impulso, desde que se toma con un lazo inductivo en la guía de ondas del transmisor, hasta que llega a la salida del Puesto de antenas, se puede ver en el esquema de la parte de alta frecuencia del Receptor. Este impulso trae muestra de la frecuencia del impulso que se transmite al espacio por el Magnetrón y se amplifica en el AD8057 a la entrada de la T318(Pierrat, 2014d). Por el conector coaxial XRJ3 llega la señal de radiolocalización del canal principal. El recorrido por la parte de alta frecuencia de esta señal, desde que entra por la antena UV11, hasta que llega a la salida del Puesto de antenas, se puede ver en el esquema de la parte de alta frecuencia del Receptor. Esta señal, si el la reflejada de un objeto en movimiento, trae la misma frecuencia del transmisor pero alterada por el efecto Doppler. Si es de un objeto inmóvil su frecuencia coincide con la frecuencia del transmisor y por tanto con la del impulso de muestra(Pierrat, 2014d). Por el conector coaxial XRJ2 llega el “impulso de faseo” imitado que se elabora en la T311. Este impulso trae la frecuencia intermedia que se emplea para modular los impulsos.
(46) CAPÍTULO 3. OBTENCIÓN DE LA FUNCIONALIDA D DE BLOQUES ESQUEMÁTICOS DEL CÓDIGO FUENTE DE LA T318. 36. de las señales de los objetivos imitados en la T311. Como el impulso de faseo imitado tiene la misma frecuencia que las señales imitadas, cuando ambos llegan al SOM, éste los ve con frecuencias iguales y considera que son objetos inmóviles y los elimina. Esto se emplea para el control de funcionamiento de la Estación y para los entrenamientos de las dotaciones combativas (Pierrat, 2014d). Las tres señales se aplican al conmutador analógico, implementado en el integrado CD4053. Aquí a la entrada Y1 se aplica el impulso de faseo del Puesto de antenas y a la entrada Y0 se aplica el faseo imitado. A las entradas Z1 y Z0 se aplican al mismo tiempo la señal de FI del canal principal. La codificación que llega a las entradas A, B y C del integrado CD4053 provoca que a su salida “Y” se obtenga el faseo del transmisor o el del imitador en dependencia del mando “Antena-Imitador” que llega a la T318 (este código se elabora en el FPGA). Así mismo, en la salida “Z” siempre estará la señal del canal principal, ya que es la misma para las dos entradas (Z0 y Z1). Ambas señales de salida se introducen en los canales “principal” y “de faseo” para, luego de ser filtradas, realizarles la conversión A/D en los integrados AD9224 (Pierrat, 2014d). 3.2. Descripción de bloques lógicos empleados en la T318. Las señales que se toman para el funcionamiento del SOM vienen, como se explicó en el funcionamiento básico del SOM, desde el receptor, desde la etapa de frecuencia intermedia. En el SOM el impulso de faseo y las señales reflejadas del objeto, que mantienen su relación de fase después de la conversión a FI, se comparan en el detector de fase (DF). El impulso de faseo que tiene una muestra de la fase del impulso del transmisor, impone su fase al heterodino coherente, que se emplea como oscilador patrón en este detector de fase; por tanto la fase de la señal reflejada desde el objeto se compara, en el detector de fase, con la fase del impulso de ese oscilador patrón (Pierrat, 2014d). Si el objeto es inmóvil, las fases coinciden y el detector de fase da a su salida impulsos con igual amplitud, y el esquema de resta los elimina; eliminándose la señal de salida del objeto inmóvil. Por el contrario, si el objeto es móvil, las fases entre faseo y señal reflejada no coinciden y en la salida del DF aparecen impulsos modulados por esa diferencia de fase proporcional a la frecuencia doppler, habiendo señal a la salida del esquema de resta..
Figure



+7




Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
En junio de 1980, el Departamento de Literatura Española de la Universi- dad de Sevilla, tras consultar con diversos estudiosos del poeta, decidió propo- ner al Claustro de la
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
«Según el artículo 21 de la vigente Ley de Expropiación de 16 de diciembre de 1954, el acuerdo de necesidad de ocupación inicia el ex- pediente expropiatorio, y a tenor del artículo
Así, antes de adoptar una medida de salvaguardia, la Comisión tenía una reunión con los representantes del Estado cuyas productos iban a ser sometidos a la medida y ofrecía
