UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS COMPUTACIONALES
“APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA DAR
AUTONOMIA DE MOVIMIENTO Y
PERCEPCION AUDITIVA EN EL
CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE
COMANDO DE VOZ.”
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN SISTEMAS COMPUTACIONALES
AUTOR: JOSE LUIS VILLOTA MIDEROS
TUTOR: ING. ALEX COLLANTES
i
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA
DAR AUTONOMIA DE MOVIMIENTO Y
PERCEPCION AUDITIVA EN EL
CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE
COMANDO DE VOZ.”
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN SISTEMAS COMPUTACIONALES
JOSE LUIS VILLOTA MIDEROS
TUTOR: ING. ALEX COLLANTES
GUAYAQUIL – ECUADOR
2012
ii
APROBACION DEL TUTOR
En mi calidad de Tutor del trabajo de investigación, “
APLICACIÓN DE LA
INTELIGENCIA ARTIFICIAL PARA DAR AUTONOMIA DE
MOVIMIENTO
Y
PERCEPCION
AUDITIVA
EN
EL
CONTROL DEL ROBOT HUMANOIDE “ROBOVIE - X”
MEDIANTE COMANDO DE VOZ.
“ elaborado por el Sr. José Luis Villota Mideros, egresado de la Carrera de Ingeniería en Sistemas Computacionales, Facultad de Ciencias Matemáticas y Físicas de la Universidad de Guayaquil, previo a la obtención del Título de Ingeniero en Sistemas, me permito declarar que luego de haber orientado, estudiado y revisado, la Apruebo en todas sus partes.Atentamente
………. Ing. Alex Collantes
iii
DEDICATORIA
iv
AGRADECIMIENTO
v
TRIBUNAL DE GRADO
Ing. Frenando Abad Montero Ing. Juan Chanabá Alcócer DECANO DE LA FACULTAD DIRECTOR
CIENCIAS MATEMATICAS Y FISICAS
Nombres y Apellidos Nombre y Apellidos MIEMBRO DEL TRIBUNAL MIEMBRO DEL TRIBUNAL
vi
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“
APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA
DAR AUTONOMIA DE MOVIMIENTO Y PERCEPCION
AUDITIVA EN EL CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE COMANDO DE VOZ.
“RESUMEN
vii
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“
APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA
DAR AUTONOMIA DE MOVIMIENTO Y PERCEPCION
AUDITIVA EN EL CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE COMANDO DE VOZ.”
Proyecto de trabajo de grado que se presenta como requisito para optar por el título de INGENIERO EN SISTEMAS COMPUTACIONALES
Autor: José Luis Villota Mideros.
C.I.:092366781-0
Tutor: Ing. Alex Collantes
viii
CERTIFICADO DE ACEPTACIÓN DEL TUTOR
En mi calidad de Tutor, nombrado por el Departamento de Graduación y la Dirección de la Carrera de Ingeniería en Sistemas Computacionales de la Universidad de Guayaquil,
CERTIFICO:
Que he analizado el Proyecto de Grado presentado por el/la egresado(a) José Luis Villota Mideros, como requisito previo para optar por el título de Ingeniero cuyo problema es:
“
APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA
DAR AUTONOMIA DE MOVIMIENTO Y PERCEPCION
AUDITIVA EN EL CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE COMANDO DE VOZ.”
considero aprobado el trabajo en su totalidad.
Presentado por:
VILLOTA MIDEROS JOSE LUIS 0 9 2 3 6 6 7 8 1-0 Apellidos y Nombres completos Cédula de ciudadanía N°
Tutor: Ing. Alex Collantes
Guayaquil, Mayo de 2012
ix
ÍNDICE GENERAL
CARÁTULA i
CARTA DE ACEPTACIÓN DEL TUTOR ii
DEDICATORIA iii
AGRADECIMIENTO iv TRIBUNAL DE GRADO v
RESUMEN vi
CERTIFICADO DE ACEPTACIÓN DEL TUTOR viii
ÍNDICE GENERAL ix
OBJETIVO xii ABSTRACT xiii
INTRODUCCIÓN xiv
CAPÍTULO 1.- EL PROBLEMA PLANTEAMIENTO DEL PROBLEMA 1
JUSTIFICACIÓN E IMPORTANCIA DE LA INVESTIGACIÓN 7
CAPÍTULO II..- MARCO TEÓRICO Antecedentes del estudio 8
FUNDAMENTACIÓN TEÓRICA 9
Inteligencia Artificial 9
Introducción 9
Nacimiento de la Inteligencia Artificial 9
¿Qué es la inteligencia Artificial? 11 Aportes de otras ciencias a la Inteligencia Artificial 12
La Inteligencia Artificial en la actualidad 14
Aplicación de la inteligencia artificial 15 La Robótica 17
x
Entrada y salida Digitales 20
FUNDAMENTACION LEGAL 22
Régimen del buen vivir 22
Consciencia tecnológica – Vittorio Frosini 23
AAAI 23
ISO Standard 8373:1994 23
Derechos de auditoria 24
Preguntas a contestarse 25
Variables de la investigación` 26
DESARROLLO DEL PROYECTO 27
d. Pruebas funcionales 52
2. Arduino UNO 54
a. Selección 54
b. Adquisición 64
c. Pruebas funcionales. 64
3. Modulo de voz 65
a. Selección 65
b. Adquisición 66
c. Pruebas funcionales 66
4. PRUEBAS INTEGRALES 77
Combinación de pruebas 90
5. PROGRAMACION DE COMANDOS E INSTRUCIONES 92
Definición de comandos de Voz. 92
5.2 Definición de rutina de movimientos a Robovie KT-X 94
i. Diagramación de bloques – Inicio 95
ii. Diagramación de bloques – Ejercicios 96
iii. Diagramación de bloques – Ritmo 97
iv. Diagramación de bloques – Defensa 98
xi
vi. Diagramación de bloques – Gracias. 100
Definiciones conceptuales 101
CAPÍTULO III.- METODOLOGÍA
DISEÑO DE LA INVESTIGACIÓN
Modalidad de la Investigación 103
Tipo de Investigación 104
Operacionalización de las Variables 105
Recolección de la Información 106
Procedimientos de investigación 106
CAPÍTULO IV.- MARCO ADMINISTRATIVO
CRONOGRAMA 108
PRESUPUESTO 109
Ingresos 110
REFERENCIAS BIBLIOGRÁFICAS 111
DIRECCIONES WEB 113
xii
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA
DAR AUTONOMIA DE MOVIMIENTO Y
PERCEPCION AUDITIVA EN EL
CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE
COMANDO DE VOZ.”
Autor/a: José Luis Villota Mideros. Tutor/a: Ing. Alex Collantes
xiii
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“
APLICACIÓN DE LA INTELIGENCIA ARTIFICIAL PARA
DAR AUTONOMIA DE MOVIMIENTO Y PERCEPCION
AUDITIVA EN EL CONTROL DEL ROBOT HUMANOIDE
“ROBOVIE - X” MEDIANTE COMANDO DE VOZ.”
ABSTRACT
xiv
INTRODUCCIÓN
El hombre como tal se encuentra inmerso en una de las revoluciones más grandes
y más trascendentales de la historia, que es la llamada revolución tecnológica la
cual a medida que pasa el tiempo evoluciona a pasos agigantados, dado esto el
hombre ha tomado estas herramientas tecnológicas para agilitar los procesos en
diferentes campos con el fin de obtener una respuesta prudente a sus
requerimientos y contar con una mayor disponibilidad, por esto cada día existen
nuevas investigaciones y estudios.
Haciendo uso de la tecnología se han podido dar grandes aportes a una ciencia que
no tiene mucho tiempo, esta ciencia se la conoce como inteligencia artificial que
no es mas que la ciencia que intenta emular el comportamiento humano de forma
racional, las primeras ideas de crear maquinas pensantes fueron dadas por
historiadores y escritores, que en sus narraciones y obras manifestaban la
presencia de estas maquinas que ejercen interacción y desenvolvimiento en el
mundo real.
Poco a poco estas ideas han ido evolucionando permitiendo plasmar lo que en la
antigüedad eran puros comentarios vertidos de la imaginación, así poco a poco
xv
es la medicina, filosofía, matemáticas, neurociencia, robótica y demás. En la
actualidad por medio de este trabajo se busca incentivar a los integrantes de la
carrera de ingeniería en sistemas con el fin de que creen aportes a nuestra
sociedad y de romper esas limitaciones en el campo tecnológico.
En esta investigación se podrán ver plasmados los comentarios acontecidos de las
diferentes ciencias en un robot humanoide con capacidades similares a la de un
hombre, demostrando que se pueden adecuar estas invenciones a varios problemas
1
CAPÍTULO I
EL PROBLEMA
PLANTEAMIENTO DEL PROBLEMA
UBICACIÓN DEL PROBLEMA EN UN CONTEXTO
Autonomía de movimiento y percepción auditiva en el control de robots
humanoide, mediante comandos de voz.
SITUACIÓN CONFLICTO NUDOS CRÍTICOS
Estos problemas han sido evidenciados en ciencias y áreas como la industria,
medicina, construcción y tareas complejas que eran realizadas por la humanidad
por lo cual se presenta como necesitad que los robots realicen estas tareas sin
necesitad de que la mano humana intervenga ya que este tiempo podría ser usado
2 CAUSAS Y CONSECUENCIAS DEL PROBLEMA
Las causas que originan el planteamiento de este problema, se dan debido a los
recientes avances de la tecnología que hacen posible la interacción entre los
robots, el medio ambiente y los seres humanos. Dando como consecuencia la
invención de nuevas soluciones a limitantes de carácter humano, como aportes
hacia lo sociedad discapacitada, desarrollo de aplicaciones complejas y tareas de
precisión.
DELIMITACIÓN DEL PROBLEMA
Este problema enfatiza el uso de las herramientas informáticas, avances robóticos
y los portes de la IA (Inteligencia artificial), la cual promueve realizar una
investigación científica, que será esquematizada en un modelo que lleve la
integración de dichos conceptos.
FORMULACIÓN DEL PROBLEMA
La intervención de ciencias como la robótica, informática e inteligencia artificial
dierón cabida a que se busque alternativas para el desarrollo de actividades que
solo eran realizadas por el hombre, por ello el nacimiento de maquinas con
autonomía de movimiento para que desarrollen acciones con precisión y así
3 EVALUACIÓN DEL PROBLEMA
Delimitado:
Poco interés por parte de los estudiantes de la carrera de ingeniería en sistemas
computacionales en los campos de la robótica e inteligencia artificial, ya que en
la actualidad no existe mucha inversión tecnológica e incentivos profesional.
Claro:
Muestra claridad dado que este tema no permite ambigüedad alguna ya que se
enfoca en conceptos puntuales como la electrónica, robótica e inteligencia
artificial, dando a los integrantes de la carrera caminos convincentes de
investigación.
Evidente:
Es notable la evidencia ya que en varias industrias están aplicando día a día estas
metodologías e ingresando varios robots autónomos en diferentes tareas.
Concreto:
Es concreto ya que puntualiza en el uso de la inteligencia artificial, robótica y
electrónica para desarrollar un robot humanoide con autonomía de movimiento y
4 Relevante:
Esta problemática se muestra relevante ya que los aportes de la inteligencia
artificial no solo se muestra como punto académico, sino como una herramienta
de ayuda al hombre moderno, por ende es necesario realizar los respetivos
analices pertinentes para el desarrollo del mismo.
Original:
El análisis de este problema enfatiza la aplicación de nuevos términos y la
integración de varios conceptos que en su totalidad no han sido empleados y
explotados por la comunidad, lo cual permite desarrollar nuevas aplicaciones y
5
OBJETIVOS DE LA INVESTIGACION
Objetivos generales
Implementar un robot humanoide, el cual ejecute acciones móviles a través de
comandos de voz, basado en conceptos robóticos y aportes de la inteligencia
artificial.
Objetivos específicos
Ensamblar robot humanoide “Robovie - X”.
Manipular la aplicación RobovieMaker2 con el fin de proporcionar acciones
móviles al robot como:
o Saludar
o Realizar ejercicios.
o Defensa personal.
o Esperar.
o Bailar.
o Gracias
Estas acciones de movimiento se realizaran en terreno horizontal.
Integrar modulo Vrbot a placa controladora principal, con el fin de otorgar
percepción auditiva al robot humanoide “Robovie-X”.
Controlar el robot humanoide “Robovie-X” a través de comando de voz
6 ALCANCES
El robot humanoide KT-X con sus respectivos accesorios e integrados adicionales
serán entregados a la universidad con la capacidad de:
Ejecutar acciones a través de comandos unipersonales, por lo cual si se
desea que otra persona indique un comando este previamente tiene que se
ser registrados.
Las acciones y desempeño del proyecto se realizaran en terreno horizontal
no resbaloso, por lo cual no podrá realizar ninguna acción en terrenos con
topografía irregular.
El robot esta diseñado para tener forma de humanoide por lo cual sus
piezas no podrán ser modificadas para tener otra apariencia.
La programación se llevara acabo en las herramientas RobovieMaker2
(programador de servomotores), Vrbot GUI (reconocimiento de voz) y
7 JUSTIFICACION E lMPORTANCIA DE LA INVESTIGACION
Los avances tecnológicos y los aportes realizados por varios expertos que han
dedicado su vida a la contribución de nuevas aplicaciones son las primicias para
la creación de nuevas investigaciones e implementaciones en el campo robótico y
electrónica, así mismo la interacción de mecanismos móviles con el medio
ambiente resultado de varios experimentos y estudios de la inteligencia artificial.
Lo cual ha podido brindar beneficios a campos que tenían limitaciones en
aplicaciones que no podían ser realizadas por el hombre.
Dado que en la carrera no se han profundizado estos temas se iniciara los
estudios desde su nacimiento y evolución con el fin de incentivar el interés a los
estudiantes de nuestra carrera planteándolo en una investigación teórica -
práctica.
El beneficio de este estudio será parcialmente hacia la sociedad estudiantil, los
cuales a medida de que se creen nuevos desarrollos e investigaciones brindaran
8
CAPÍTULO II
MARCO TEÓRICO
ANTECEDENTES DEL ESTUDIO
Como antecedente a este estudio se ha tomado el texto desarrollado por J. Russel
y Peter Norvig “Inteligencia Artificial un enfoque moderno” Edición Nro. 2
el cual muestra desde lo esencial que es su nacimiento, primeras investigaciones y
porque el interés en estudiar esta ciencia tan amplia que es la inteligencia
artificial, así mismo se han tomado versiones dadas por el escrito Isaac Asimov el
cual en sus obras de ficción desde el año 1920 ya plasmaba la interacción del ser humano con agentes móviles “Robots” que con la ayuda de la inteligencia
artificial ejercía acciones con el mundo real.
Como acontecimiento de estos temas se enfatizo la investigación de la robótica, la
cual se pudo notar que este término ya era usado desde los años 1921 con el termino de “Robota” dado por el escrito Checo Karel Capek en una de sus obras RUR
(Robots Universales de Rossum), por lo cual a medida que pasa el tiempo se han
integrado nuevas ciencias como la electrónica que ha permitido plasmar las ideas
vertidas en estas obras.
Y en la actualidad los nuevos alcances desarrollados como el del proyecto de
enviar un robot humanoide al espacio, desarrollado por la NASA y General
Motors que consistió en enviar al robot Robonaut 2 para hacer pruebas de
9 FUNDAMENTACIÓN TEÓRICA
Inteligencia Artificial
Introducción
El hombre en el pasar de la historia ha intentado explicar y entender como
pensamos y en como un puñado de materia puede percibir, entender, predecir y
manipular cosas de un mundo tan complejo. Por lo que la inteligencia artificial
intenta ir un poco más allá no solo el hecho de comprender sino escalar un poco
más, tratar de construir entidades inteligentes.
La inteligencia es una de las ciencias más recientes, la cual se comenzó a plasmar
a finales de la segunda guerra mundial, por lo cual este nombre se le dio a raíz del
año 1956. (J. Russel y Peter Norvig “Inteligencia Artificial un enfoque moderno” Edición Nro. 2)
El desarrollo de esta ciencia ha sido muy compleja y ha tenido varias limitaciones
pero no cabe duda que con los primeros pasos dados, no están en un futuro no
muy lejano la meta de las llamadas maquinas pensantes.
Nacimiento de la Inteligencia Artificial
El nacimiento de la inteligencia artificial lo podemos enfatizar en tres
10 Este criterio dado por la historiadora Pamela McCorduck, no era más que
el primer punto de vista dado de forma imaginativa de lo que podía acontecer y de
lo que se buscaría en esta ciencia.
“nuestra historia está llena de intentos –estúpidos, fastidiosos, cómicos,
honestos, legendarios y reales – para obtener inteligencias artificiales, para
reproducir aquello que nosotros somos en esencia”
[MacCorduck, 1979:3]
Otro planteamiento formulado por Vannervar Bush el cual en una de sus
obras “As We May Think” publicada en el año 1945 predecía metafóricamente
una visión hacia el futuro, donde las computadoras asistirían a los seres
humanos en algunas actividades.
Y como ultimo el gran aporte de Alan Turing en el año 1950 en el cual
mostro un artículo sobre la inteligencia artificial, titulado “Inteligencia y Funcionamiento de Máquinas”. Esto consistía en una prueba llamada el
"Test de Turing" el cual quería determinar el carácter inteligente o no de una
máquina.
Este test se trataba que el interrogador tenga que descubrir el sexo de dos
participantes A y B situados en otra habitación, cuando, aunque los dos dicen
ser mujeres, en verdad son un hombre y una mujer. En la propuesta original de
Turing, se trataba de sustituir a la mujer por un ordenador, y que el
11 los dos decían ser personas. Este objetivo había que cumplirlo incluso sabiendo
que los participantes no estaban obligados a decir la verdad y que, por ejemplo,
la máquina podía decidir dar un resultado erróneo en una multiplicación o decir
el resultado lo suficientemente más tarde después de haberlo obtenido, para
engañar al interlocutor sobre su propia habilidad de cálculo.
Estos tres acontecimientos nos permiten viajar en el tiempo y denotar como fue
naciendo por medio de ideas el interés en la inteligencia artificial.
¿Qué es la Inteligencia Artificial?
Existen varias explicaciones de que es la inteligencia artificial pero hasta el
momento no existe un concepto globalizado en el cual se pueda fijar la
conceptualización del mismo. Ya que en las mayoría de las explicaciones lo
enfocan por diferentes características como son el de sistemas que piensan
como humano, sistemas que piensan racionalmente, sistemas que actúan como
humano y sistemas que actúan racionalmente por lo cual ha sido sintetizado
por J. Russel y Peter Norvig en el libro “Inteligencia artificial un enfoque moderno”.
Por lo cual podemos indicar que la inteligencia artificial es la ciencia que
intenta emular el comportamiento y pensamiento humano de forma racional, a
12 Aportes de otras ciencias a la Inteligencia Artificial
Fundamentalmente hablar de la inteligencia artificial es hablar de la integración de
varias ciencias para su desarrollo y evolución. Entre estas ciencias tenemos:
Filosofía
Esta ciencia se ha introducido a la inteligencia artificial por el hecho de usar las
palabras como base de conocimiento, plasmando que equipos mecánicos podrían
sacar sus propias conclusiones.
A esto podemos acotar criterios impartidos por grandes filososfos:
Aristóteles (384-322 a.c.) fue el primero en formular un conjunto preciso
de leyes que gobernaban la parte racional de la inteligencia.
Descartes (1596–1650), Leibniz (1646–1716): la mente está ligada al
mundo físico.
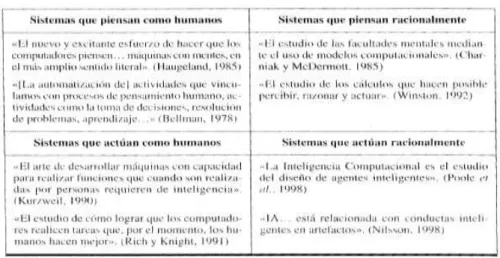
Cuadro 1.- Definiciones de la IA.
13 Hume (1779), Russell: el conocimiento es fruto de la percepción, se
adquiere por la experiencia (inducción) y está representado por teorías
lógicas.
Matemáticas
El aporte matemático a la inteligencia artificial fue primordial al notar los
filósofos que era necesario formulaciones matemáticas enfocadas en tres aéreas
como son la lógica, computación y probabilidad.
Comenzando su desarrollo en esquemas vertidos por George Boole ( 18 15- 1864)
que definió la lógica proporcional de (Boole -1847).
Luego en 1879 por Gottlob Frege (1848- 1925) donde amplio la lógica de Boole
para incluir objetos y relaciones. Además creo la lógica de primer orden la cual
hasta la actualidad se la usa sistemas básico de la presentación del conocimiento.
Psicología cognitiva
Este campo enfatizaba las teorías sobre la conducta y las bases del
comportamiento racional, mostrando la representación de los estímulos externos y
14 Ingeniería Computacional
Se podría decir que este campo es uno de los más importantes ya que se necesita
para la creación del mecanismo (hardware) así como de la implementación de una
aplicación (software).
Entre los aporte podemos citar el ENIAC, desarrollado para un proyecto militar
secreto, en la Universidad de Pensilvania donde John Mauichly y John Eckert
ayudaron en el desarrollo, podríamos indicar que este proyecto es el precursor de
los computadores modernos.
La Inteligencia Artificial en la actualidad
La IA en la actualidad es de gran aporte a varios campos, los cuales se manifiestan
en propósitos generales, de aprendizaje y de percepción. Además abarcan
propósitos específicos como son el de diagnósticos médicos, apoyo industrial y
aportes aeroespaciales.
A medida que pasa el tiempo la inteligencia artificial avanza a pasos firmes para
llegar a la emulación del pensamiento humano, así como de la dotación de
15 Aplicación de la inteligencia artificial
Las áreas de aplicación de la Inteligencia Artificial se pueden dividir en dos, de
acuerdo al contenido del estudio o de acuerdo a las herramientas y técnicas
utilizadas.
a) Contenido
Los seres humanos, animales y robots inteligentes y otros artefactos, tienen una amplia variedad de capacidades, todas ellas muy complejas y difíciles de explicar o modelar, tanto en el plano científico como ingenieril, la IA ha generado varios subcampos, tratando aspectos particulares de la inteligencia.
b) Técnicas
Debido a que las aplicaciones de la IA son muchas y muy diversas, algunos de los subcampos se agrupan en torno a las técnicas relevantes a cada clase de problemas.
Subcampos basados en el contenido.
Percepción, dadas en la visión, percepción auditiva, táctil, el gusto y el olfato. Esto se desglosa en el estudio de los diferentes tipos de procesos incluyendo la transducción física, el análisis y reconocimiento de patrones, la segmentación y "parsing" complejo de los datos sensoriales, la interpretación y el control de la atención. Este es un enorme subcampo y puede dividirse en más campos especializados de acuerdo a la modalidad sensorial, el tipo de cosas que se perciben, las formas de representación utilizadas, si la percepción está puramente dirigida por los datos o incluye procesos top-down, los mecanismos utilizados (por ejemplo neuronales o simbólicos), la arquitectura más grande que contiene el sistema.
Procesamiento de lenguaje natural, incluida la producción y la interpretación de la lengua hablada y escrita, ya sea manuscrito, impreso o electrónico en todo (por ejemplo el correo electrónico).
16 Planificación, solución de problemas, diseño automático: dado un problema complejo y una colección de recursos, restricciones y criterios de evaluación crear una solución que cumpla con las restricciones y lo haga bien o sea óptima de acuerdo con los criterios establecidos, o si ello no es posible proponer algunas buenas alternativas.
Variedad de razonamiento: Esto incluye estudio tanto del razonamiento informal de sentido común como de razonamiento experto especializado. El primero 2 incluye el estudio del razonamiento analógico, la inferencia con revocación, razonamiento basado en casos. El último incluye la lógica y razonamiento matemático, incluyendo el diseño de demostradores de teoremas y de sistemas de inferencia, ya sea con la intención de modelar diversas clases de capacidades inferenciales y matemáticas humanas, o para fines prácticos, por ejemplo, en “toolkits” de álgebra simbólica, o razonamiento en robots o sistemas de control autónomos.
Estudio de las representaciones: la investigación de las propiedades formales de los diferentes tipos de representaciones, los mecanismos necesarios para su funcionamiento, y el tipo de tareas para las que son buenas o malas. Esto puede incluir el estudio de ontologías de diversos tipos. Sobre algunos mecanismos se afirma a veces que no utilizan ninguna representación (por ejemplo las redes neuronales), mientras que realmente son un tipo especial de representación, por ejemplo, numérica y continua, en contraposición a la estructural y discreta.
Técnicas y mecanismos de memoria: análisis de las necesidades de los diversos tipos de memoria, incluyendo grandes almacenes de conocimiento conteniendo diversos tipos, ya sea para modelar el conocimiento humano o para su utilización en diversos tipos de aplicaciones.
17 Mecanismos afectivos: durante los años 90 ha habido un creciente interés en el papel de la motivación y las emociones en la inteligencia. Esto se estudia a veces como un tema propio, y, a veces, como parte del estudio de arquitecturas completas para sistemas autónomos inteligentes. Una teoría general tendría que representar a una amplia variedad de estados afectivos y procesos, incluidos deseos, preferencias, antipatías, placeres, dolores, objetivos de largo plazo, intenciones, ideales, valores, actitudes, estados de ánimo, y mucho más. Uno de los debates actuales se refiere a si las emociones son necesarias para la inteligencia, o si son simplemente efectos secundarios o nuevas características de los mecanismos que se requieren para otras funciones.
Robótica: uno de los subcampos más antiguos de la IA. A veces estudiado con el propósito de producir nuevos tipos de máquinas útiles, y, a veces, porque diseñar completamente robots de trabajo proporciona un banco de pruebas para la integración de las teorías y técnicas de distintos subcampos de la IA, por ejemplo, percepción, aprendizaje, memoria, control motor, planificación, etc. Es decir, se trata de un contexto para explorar ideas acerca de sistemas completos.
La Robótica
El autor más prolífico de cuentos de ciencia ficción sobre robots fue Isaac
Asimov (2 de enero de 1920 - 6 de abril de 1992), quien puso a los robots y a su
interacción con la sociedad en el centro de muchas de sus obras. Asimov examinó
con mucho cuidado el problema del conjunto de instrucciones ideales que los
robots debían tener para disminuir el riesgo para los seres humanos, con lo cual
vertió tres leyes de la robótica:
1. “Un robot no debe dañar a un ser humano o, por su inacción, dejar
18 2. “Un robot debe obedecer las órdenes que le son dadas por un ser
humano, excepto si estas órdenes entran en conflicto con la primera
ley”.
3. “Un robot debe proteger su propia existencia, hasta donde esta
protección no entre en conflicto con la primera o la segunda ley”.
Estas tres leyes, aunque se anunciaron en algunas historias anteriores, fueron introducidas en 1942 en su cuento “Runaround”, que aparece en las colecciones
“I, Robot” (1950), “The Complete Robot” (1982) y “Robot Visions” (1990).
Más tarde, Asimov añadió la ley cero (la cuarta ley):
4. “Un robot no puede dañar la humanidad, o, por su inacción, permitir
que la humanidad sufra daño”.
En el primer parágrafo del cuento “Liar!” (1941), que además menciona la
19 Origen de la palabra robot
La palabra “robot” fue introducida al público por el escritor Checo Karel Capek,
en su obra RUR (Robots Universales de Rossum) que se estrenó en 1921. La obra
comienza en una fábrica que hace personas artificiales llamadas robots, pero estos
son más cercanos a la idea actual de androides o clones, criaturas que no pueden
ser confundidas por seres humanos. Estos robots pueden pensar claramente por sí
mismos a pesar de que parecen felices sirviendo a los seres humanos.
¿Qué es la robótica?
Es la ciencia que elabora maquinas que pueden hacer labores que hacemos los
humanos, esta se encarga de crear maquinas capaces de imitar al hombre en la
realización de diversas actividades o trabajos principalmente a través de la
inteligencia artificial.
Su propósito es crear maquinas que reproduzcan operaciones manuales, por lo
cual son muy útiles en la sustitución de personas en tareas tediosas, peligrosas y
20 Entrada y salida Digitales
Entradas digitales
Los módulos de entrada digitales permiten conectar al autómata, captadores de
tipo todo o nada como finales de carrera pulsadores
Los módulos de entrada digitales trabajan con señales de tensión, por ejemplo
cuando por una vía llegan 24 voltios se interpreta como un "1" y cuando llegan
cero voltios se interpreta como un "0"
El proceso de adquisición de la señal digital consta de varias etapas: Protección contra sobretensiones
Filtrado
Puesta en forma de la onda
Aislamiento galvánico o por optoacoplador.
Salidas digitales
Un módulo de salida digital permite al autómata programable actuar sobre los reaccionadores y accionadores que admitan ordenes de tipo todo o nada.
El valor binario de las salidas digitales se convierte en la apertura o cierre de un relé interno del autómata en el caso de módulos de salidas a relé.
En los módulos estáticos (bornero), los elementos que conmutan son los componentes electrónicos como transistores o triacs, y en los módulos electromecánicos son contactos de relés internos al módulo.
21 El proceso de envío de la señal digital consta de varias etapas:
Puesta en forma
Aislamiento
Cirduito de mando (relé interno)
Protección electrónica
22 FUNDAMENTACIÓN LEGAL
TÍTULO VII
RÉGIMEN DEL BUEN VIVIR
Capítulo primero
Sección primera
Educación
Art. 343.- El sistema nacional de educación tendrá como finalidad el desarrollo de
capacidades y potencialidades individuales y colectivas de la población, que
posibiliten el aprendizaje, y la generación y utilización de conocimientos,
técnicas, saberes, artes y cultura. El sistema tendrá como centro al sujeto que
aprende, y funcionará de manera flexible y dinámica, incluyente, eficaz y
eficiente.
El sistema nacional de educación integrará una visión intercultural acorde con la
diversidad geográfica, cultural y lingüística del país, y el respeto a los derechos de
las comunidades, pueblos y nacionalidades.
Art. 350.- El sistema de educación superior tiene como finalidad la formación
académica y profesional con visión científica y humanista; la investigación
científica y tecnológica; la innovación, promoción, desarrollo y difusión de los
saberes y las culturas; la construcción de soluciones para los problemas del país,
23 Consciencia Tecnológica - Vittorio Frosini
La coyuntura presente reclama de los juristas, los filósofos y los teóricos al
Derecho de una verdadera “consciencia tecnológica”.
AAAI (Association for the Advancement of Artificial Intelligence).
"Primero utilizar técnicas de IA y la ciencia cognitiva a los expertos, para resolver
problemas en un dominio, así como la enseñanza de los profesores y los
estudiantes aprenden en ese dominio.
El segundo objetivo de la investigación consiste en explicar el aprendizaje y la
enseñanza como partes del ser humano sistema de procesamiento de información.
El objetivo de la investigación tercero es para demostrar la integridad y fiabilidad
en la parte de ingeniería de la disciplina y para demostrar que los sistemas
inteligentes de instrucción se pueden utilizar con eficacia en situaciones de
formación y en el aula. "(Shapiro, Stuart C., editor 1992 Enciclopedia de la
Inteligencia Artificial 2 ª ed Nueva York: John Wiley & Sons, Volumen 1,
página 434).
ISO Standard 8373:1994
Manipulating Industrial Robots – Vocabulario, 11 de diciembre de 2009
Robot Industrial: Un manipulador automáticamente controlado, reprogramable,
multiuso, programable en tres o más ejes, que pueden estar fijos en un lugar o
24 ISO 11593:1996
Manipulating industrial robots - Automatic end effector exchange systems -
Vocabulary and presentation of characteristics. - 1st edition.
Automatic end effector exchange systems: This International Standard defines
terms relevant to automatic end effector exchange systems used for manipulating
industrial robots operated in a manufacturing environment. The terms are
presented by their symbol, unit, definition and description. The definition includes
applicable references to existing standards. Annex A provides a format for the
presentation of automatic end effector exchange systems characteristics.
Derechos de auditoria
De la obra y conservación del Proyecto (software y/o hardware), producto de mi
Proyecto de Grado, reservándose la misma, su uso exclusivo, así como la libertad
de realizar, autorizar ó prohibir su reproducción parcial ó total.
En caso que violaré la decisión anterior, me someto a la indemnización por daños
y perjuicios que ocasionare mi irrespeto a este compromiso y a las otras acciones
contempladas en la Ley de Propiedad Intelectual, Ley de Comercio Electrónico y
25 Cabe recalcar que todo lo usado será entregado a la universidad como respaldo del
proyecto.
PREGUNTAS A CONTESTARSE
1. ¿Desde qué punto se establece que un proyecto deja de ser robótica para
convierte en proyecto de inteligencia artificial?
2. ¿Qué opina de la implementación de sensores en la emulación de los
sentidos?
3. ¿Usted cree que la ejecución de acciones a través de comandos de voz, han
sido de gran a aporte a la sociedad?
4. ¿Qué opina del uso de herramientas didácticas para la implementación de
26 VARIABLES DE LA INVESTIGACIÓN
Variable Independiente
Inteligencia Artificial
Es la ciencia que intenta emular el comportamiento y pensamiento humano
de forma racional, a través de sistemas computacionales y adecuaciones de
hardware.
Variable Dependiente
Autonomía de movimiento.
Es la capacidad de poder desplazarse y ejecutar acciones sin tener
interacción alguna. Demostrando mayor grado de libertad.
Percepción auditiva.
Consiste en captar sonidos del ambiente lo cual es representado por el oído
ya que es el órgano receptor, el cual comienza el camino hacia el estímulo
acústico donde se va ha convertir en una sensación sonora.
Control de robot humanoide.
Fundamentalmente comprende en poder manipular un robot con forma
humana a través de comandos computacionales el cual ejecutara acciones
27 Comandos de voz.
Es una señal hablada que permite activar una función determinada. Los
comandos de voz se basan en las tareas de reconocimiento de voz.
DESARROLLO DEL PROYECTO
Antecedentes
El proyecto nace influido por los cambios tecnologicos y las necesidades humanas
ya que dia a dia la integracion hombre maquina es mas notable y al ser nosotros
entes promotores de estos proyectos se planteo abrir una brecha en esta linea de
desarrollo.
El proyecto como tal promueve realizar investigaciones a mayor escala de las
necesidades humanas las cuales podrian ser cubiertas con la ayuda de la
Tecnologia. Por lo cual haciendo referencia al ser humano se toma como prototipo
un robot humanoide, exiten diferentes tipos de robots como:
Industriales y manipuladores .- Son aquellos que son codificados para
realizar tareas monotonas como ensamblaje, cortes, reduciones, etc.
Moviles o transportadores .- Son aquellos que son creados para
movilizar objetos a diferentes puntos.
Didacticos o experimentales .- Son aquelos que son utilizados con la
28 no cumplen una tarea específica como tal, generalmente tienen la forma de
un brazo mecánico que imita la forma humana o de los robots industriales.
Básicamente podemos decir que hay dos tipos: los estáticos, que van sobre
una base fija, y los móviles, que van montados sobre una plataforma que
se puede desplazar sobre una superficie lisa.
El proyecto como tal se cita en el tercero tipo ya que la finalidad es contribuir al
desarrollo de nuevas experimentaciones pero con el valor agregado del
aprendizaje.
Una vez establecida la metodologia para desarrollar la tesis, es necesario verificar
las herramientas fisicas como logicas las cuales nombramos a continuación:
1. Robot Humanoide
a. Selección.
Esta herramienta siendo la principal en el bosquejo del proyecto se
analizo las ventajas y las deventajas de los diferentes fabricantes de
29 Cuadro comparativo de Fabricantes de robots educativos.
Fabrica Robotis Hitec Robotics Kumotek Aldebaran Robotics
Robot Bioloid Robonova KT -X NAO
Controlados
Principal CM-5
ATMEL
ATMega128 H8-60MHZ HV
Intel Atom 1.6ghz CPU
Servomotor AX-12A: 18 16 17 x VS-S092J 25
Sensor AX-S1 25 sensores
S/W Bioloid Software Robonova-I Robovie Market Linux
Fuente NIMH 9.6V Bateria
SMPS 12V 5A 6-7.4V
1 cargador de
100V 27.6 watt
Imagen
Precio $ 899.00 $ 769.00 $ 1,920.00 $ 15,900.00
Web Site http://www.robotis.com http://www.robonova.de http://www.kumotek.com/ http://www.aldebaran-robotics.com
Verificando los diferentes el fabricante se eligio la compañia Kumotek Robotic
dado que el robot humanoide KT-X era el ultimo en el mercado con mejoras en
sus servomotores, su precio estaba dentro del presupuesto y la placa controladora
permitia agregar circuiteria y modulos adicionales, asi mismo por ser ultimo en el
mercado no estaba explotado lo cual dificultaba nuestra tesis, dadole mas peso a
nuestro desarrollo.
30 Caracteristicas principales
Una vez decido el fabricante se analizo la circuiteria de la
placa madre del robot para poder verificar que se necesita
integrar para poder cumplir con el objetivo planteado, es
aquí donde se encontro varias limitantes ya que al ser un robot nuevo en el
mercado solo se lo habia fabricado para actividades didacticas, conversando con
fabrica se dieron pautas para poder integran las actividades en mensión. Sacando
como conclusion que se adquiriria el Robot Humanoide KT-X Superbot ya que
este contenia 17 servomotores los cuales iban a permitir dar mas mobilidad asi
mismo la placa madre permitiria agregar una tarjeta adicional con la cual se podria
manejar entradas y salidas digitales.
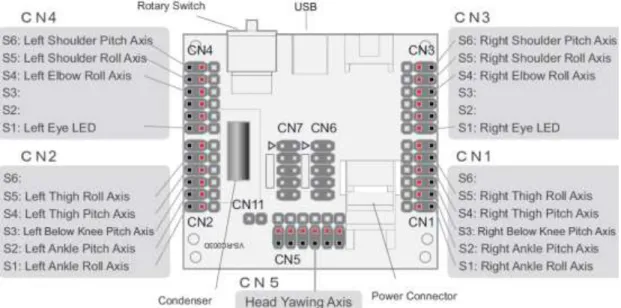
31 Figura 1.- Tarjeta VS-RC003
Fuente: Manual de conexiones.
32 b. Adquisición.
Se realizaron varias conversaciones con el personal tecnico de
la fabrica prevalenciendo como idioma de comunicación el
inglés donde se analizo ventajas y deventajas del robot(Anexo 1) luego de varias
conversaciones fabrica nos indico que el robot no podia ser usado para el objetivo
planteado, pero analizando el diseño digital se pudo verificar que a través de
circuiteria se podria agregar modulos e interfaces para que cumpla con el objetivo.
El fabricante indicando que la venta se hacia sin su responsabilidad ya que no se
podria usar para lo previamente conversado nos dirigio con su distribuidor en
Miami V-Stone los cuales nos ayudaron con una proforma que indicaba el precio,
modelo, accesorios adicionales, forma de pago.Teniendo esto se analizo la forma
de pago y la carga por salida de divisas decidiendo realizar la transferencia
electronica (Anexo 1.B). El envio se realizo desde la fabrica en Shangai, hasta
New York donde un familiar lo traslado a Ecuador, teniendolo fisicamente en 1
33 c. Ensamblaje.
Una vez llegado se procedio al ensamblaje dado que el robot se enontraba
dividido en varias placas de aluminio, placas plasticas, servomotores, placa
madre, fajas de datos, orines, engranes, bateria y varios tornillos de diferentes
tamaños los cuales se siguio paso a paso al manual de ensamblaje (Anexo 2).
Para iniciar con en el ensamblaje primeramente debemos tener conocimiento de
las herramientas que vamos a usar, asi como identificar cada una de las partes de
las cuales esta conformado el robot.
Lo que respecta a herramientas se van hacer uso de destornilladores relojeros,
cinta aislante y alicate.
34 Una vez identificadas las herramientas identificamos cada una de las partes de las
que va estar conformado el robot, separándolas por cada sección de ensamblaje,
haremos referencia a las extremidades ya que el robot a ensamblar es un robot
humanoide:
Brazo derecha.- Esta consta de cuatro platinas, dos servomotores, dos ruedas
plásticas y los tornillos respectivos para cada conexión
Ensamble mano derecha
Unimos las 2 platinas con la ayuda de la rueda plástica y asegurándola con
los tornillos.
Figura 4.- Partes del brazo derecho. Fuente: Manual de ensamblaje (Anexo 2)
35 Luego unimos los servomotores con la ayuda de las dos platinas sobrantes.
Para finalizar esta parte unimos los servomotores a las platinas.
Brazo izquierdo.- Realizamos los mismos pasos para brazo izquierdo Figura 6.- Partes del brazo derecho.
Fuente: Manual de ensamblaje (Anexo 2)
Figura 7.- Brazo derecho, ensamblado. Fuente: Manual de ensamblaje (Anexo 2)
36 Pierna derecha.- Siguiendo la misma metodología separamos cada una de las
piezas que van a ser necesarias para esta parte, encontrándonos con 10 platinas, 4
ruedas plásticas, 4 servomotores y los respectivos tornillos de interconexión.
Iniciamos uniendo la platina más grande que corresponde al pie con el
servomotor.
Figura 9.- Partes de pierna derecha. Fuente: Manual de ensamblaje (Anexo 2)
37 Luego esta con una platina en la parte superior del servomotor.
Después de esto se une un servomotor adicional a una de las platinas.
Unimos los dos servomotores anteriormente ensamblados con la ayuda de
dos platinas.
Figura 11.- Balance pierna derecha. Fuente: Manual de ensamblaje (Anexo 2)
Figura 12.- Soporte pierna derecha. Fuente: Manual de ensamblaje (Anexo 2)
Figura 13.- Balance y soporte pierna derecha.
38 Siguiendo con el ensamblaje unimos los dos servomotores sobrantes con la
ayuda de las platinas respectivas.
Para finalizar esta sección unimos todos los servomotores con la ayuda de
las platinas y a la vez agregamos dos platinas mas que son las que se van a
unir al tronco.
Figura 14.- Servomotores muslo pierna derecha. Fuente: Manual de ensamblaje (Anexo 2)
39 Pierna izquierda.- Realizamos los mismos pasos anteriormente mencionados.
Extremidades superiores e inferiores
Terminada esta etapa tenemos como resultado todas las extremidades. Figura 16.- Pierna derecha e izquierda, terminada.
Fuente: Manual de ensamblaje (Anexo 2)
40 Cabeza y tronco.- como se ha desarrollado anteriormente se separan todas las
partes, donde encontramos siete platinas, una rueda plástica, cinco servomotores,
un conector de voltaje, una tarjeta principal VS-RC003, una tarjeta VS-IX007
in/out digitales, un parlante y los respectivos tornillos de conexión.
Iniciamos uniendo los servomotores a la platina grande correspondiente a
la parte frontal y uno en la parte superior correspondiente a la cabeza. Figura 18.- Partes de cabeza y tronco.
Fuente: Manual de ensamblaje (Anexo 2)
41 Luego adicionamos los servomotores a las platinas circulare.
Teniendo los servomotores conectados, incluimos todos haciendo un solo
cuerpo donde los dos servomotores sueltos corresponden a la parte de los
hombros.
Figura 20.- Servomotores internos. Fuente: Manual de ensamblaje (Anexo 2)
Figura 21.- Estructura con servomotores internos.
42 Terminada la parte frontal continuamos con la parte posterior donde se
ensamblara la platina con la tarjeta principal RC003, la tarjeta
VS-IX007 y el conector de voltaje.
Terminada esta etapa tendremos ensamblado la parte frontal y posterior,
aquí agregaremos el parlante en la parte frontal.
Figura 22.- Integración fuente de poder y placa principal. Fuente: Manual de ensamblaje (Anexo 2)
43 Para finalizar uniremos la parte frontal y la parte posterior.
Ensamblaje final.- Para el ensamblaje final uniremos el tronco con las
extremidades superiores e inferiores, para ello nos ayudaremos de acoples
plásticos, orines y tornillos de conexión.
Extremidades superiores.
Figura 24.- Vista general de parte frontal y trasera del tronco. Fuente: Manual de ensamblaje (Anexo 2)
44 Extremidades inferiores.
Vista completa.
Figura 26.- Ensamblaje parte inferior. Fuente: Manual de ensamblaje (Anexo 2)
45 Conexión de servomotores a placa principal VS-RC003
Termino el ensamblaje se procede a conectar todos los servomotores a la placa
principal, manejando el siguiente bosquejo:
Figura 28.- Conexión de servomotores. Fuente: Manual de ensamblaje (Anexo 2)
46 Calibración
Una vez terminado el ensamblaje es necesario calibrar la postura de robot, esto se
lo hace verificando la posición de cada uno de los servomotores y siguiendo los
pasos que nombraremos a continuación. Cabe recalcar que este procedimiento se
lo realizara siempre que se deje de usar el robot por un largo tiempo o se realice el
cambio de algún servomotor;
Para la calibración primero se debe seleccionar la “posición de referencia de
fábrica”, presionando el ícono el menú de herramientas, esta opción regresa
todos los deslizadores a su posición inicial.
47 Una de las principales razones de realizar una calibración es para evitar “bloqueo de servo”. Este estado puede causar daños al servomotor, e inclusive lesiones al
operador.
Bloqueo de Servo: es un estado en el cual el ángulo de un servomotor es distinto
al ángulo de control, y ha recibido una gran cantidad de carga. Cuando esto
ocurre, se observan varios fenómenos, tales como vibración y sonidos fuertes,
calentamiento en los servomotores. Si se deja este estado durante un lapso
prolongado de tiempo, los servomotores podrían quemarse. En el peor de los
casos, los servomotores defectuosos pueden generan gran cantidad de humo. Si
ocurre este estado se debe remover rápidamente la alimentación de los
servomotores; no se debería encender ningún servomotor hasta que el que se
encuentre en estado de bloqueo de servo esté lo suficientemente fresco.
La calibración consiste en definir una “posición de referencia”, postura en la cual
el robot se encuentra erguido, sin forzar ningún servomotor. Todas las posiciones
y movimientos que se vayan a crear deber ser realizados a partir de esta posición.
Es necesario verificar antes de calibrar que todos los servidores inicien en estado
apagado, esto se lo hace desactivando cada casilla de verificación en la parte
48 Iniciamos activando los deslizadores del eje de balanceo de los tobillos derecho
(R ankleRoll) e izquierdo (L ankleRoll). Con estos servomotores encendidos, se
debe colocar el robot en una superficie plana, y ajustar los deslizadores hasta que
las platinas correspondientes a pies estén paralelas a los soportes del eje de
balanceo del tobillo, como se muestra en el gráfico.
Luego se activa los deslizadores del eje de balanceo de los muslos derecho (R
thighRoll) e izquierdo (L thighRoll). Poner el calibrador en la parte superior de las
piernas del robot y variar los deslizadores hasta obtener un alguno de 90º entre el
calibrador y cada pierna del robot. Los ángulos del eje de balanceo del muslo de
ambas piernas deben de están en línea recta.
Figura 29.- Check I/O de servomotores. Fuente: Manual de operaciones (Anexo 3)
49 Verificamos que los ángulos de los ejes de balanceo del muslo de ambas piernas
deben formar una línea recta, y deben estar de forma perpendicular al calibrador.
Siguiendo con la calibración activamos los deslizadores del eje de cabeceo del
muslo derecho (R thighPitch) y el eje de cabeceo de la rodilla derecha (R kneePitch).
Visualizando el robot desde el lado derecho, hacer coincidir la planta del pie con
el muslo, de forma paralela al suelo, alineando los ángulos de las articulaciones de
la pierna para obtener una línea recta perpendicular al suelo, como se muestra en
el gráfico.
Figura 31.- Calibración de muslos. Fuente: Manual de operaciones (Anexo 3)
Figura 32.- Balanceo de cuerpo.
50 De igual manera lo realizamos para la parte izquierda del robot. Como
comprobación de que se ha realizado una calibración correcta, se debe observar el
robot de lado, y revisar que las platinas de ambos pies que se encuentren
alineadas, así como las rodillas y los muslos. Visto desde el frente, los pies del
robot deben tener una separación aproximada de 7 mm.
Para terminar con la calibración de las piernas se realiza una última comprobación
con el calibrador, las platinas de las plantas de los pies deben estar alineadas,
paralelas al calibrador, al tener al robot erguido los ejes de cada servomotor de la
pierna deben formar una línea recta, perpendicular al suelo.
Figura 33.- Calibración de piernas. Fuente: Manual de operaciones (Anexo 3)
Figura 34.- Comprobación de calibración de piernas.
51 Siguiendo con la calibración, trabajamos con los brazos activamos los
deslizadores del eje de cabeceo del hombro derecho (R shoulderPitch) y del eje de
balanceo del codo derecho (R elbowRoll). Calibrar el brazo derecho como se
muestra en el gráfico.
Luego activamos el deslizador del eje de balanceo del hombro derecho (R
shoulderRoll), y utilizamos el calibrador para dejar una distancia entre la pierna y
la mano.
Figura 34b.- Comprobación de calibración de piernas.
Fuente: Manual de operaciones (Anexo 3)
52 Realizar el mismo procedimiento para el lado izquierdo. Una vez terminada la
calibración, se debe confirmar que todos los servomotores se encuentran en la
posición adecuada ingresando a preferencias del proyecto -calibración de
servomotores.
d. Pruebas funcionales.
Figura 36.- Calibración de mano. Fuente: Manual de operaciones (Anexo 3)
53 El ensamblaje tomo alrededor de 1 mes, una vez armado se realizo las primeras
pruebas de movilidad con la finalidad de verificar su funcionamiento, para esto se
establecio el siguiente orden:
a) Encendido.- En este punto se verifico la carga de batería, el encendido de
los leds de la placa controladora.
b) Conexión.- Aquí se verifico el reconocimiento de la placa controladora
con el computador, esto se lo hizo mediante la detección de dispositivos.
c) Movilidad.- Luego de ser detectada la tarjeta controladora se ejecuto la
aplicación Roboviemaker para verificar el funcionamiento de cada
servomotor esto se lo hizo con la opción en línea y realizando el
movimiento en el panel comenzando desde los servomotores inferiores
hasta los superiores. Aquí se verifico que la temperatura sea estable para
que no exista daño en los mismos.
54 d) Carga de archivo.- Se cargo un archivo ejemplo a la tarjeta madre por
medio del software Roboviemaker que no es más que un manejador de
bloques programado a través de diagramas de flujo, aquí se verifico el
correcto almacenamiento y ejecución del mismo. Terminado esto se
confirmo que el robot funciona correctamente.
2. Arduino
a. Selección
Al conocer que en el proyecto se realizarían comunicaciones de entradas y salidas
digitales, así como de señales TTL surgió la necesidad de
usar una plataforma electrónica que nos permita manipular
este tipo de comunicación a través de pines y de un
microcontrolador. La primera opcion era ensamblar una placa con los respectivos
integrados y resistensias para que nos sirvan de puente entre el modulo y el
computador, realizando los respectivos estudios y analisis del mercado se
encontro con una placa desarrolada en Italia por la compañía ARDUINO la cual
realiza diferentes placas integradoras de diferentes esquemas electronicos,
escogiendose la placa Arduino UNO por su costo, la facil configuración por
55 Arduino Uno
El Uno difiere de todas las placas anteriores en que no utilizan el chip controlador
USB FTDI a serie. Por el contrario, cuenta con la Atmega16U2 (Atmega8U2
hasta la versión R2) programado como un convertidor de USB a serie.
Revisión 2 de la junta Uno tiene una resistencia tirando de la línea HWB 8U2 a
tierra, por lo que es más fácil de poner en modo DFU .
1,0 pinout: añade pines SDA y SCL que se encuentran cerca al pin AREF y dos
pasadores de otros nuevos que se pongan cerca del pin de RESET, el IOREF que
permiten a los escudos de adaptarse a la tensión proporcionada por la junta.
Detalles:
Microcontroladores ATmega328
Voltaje de funcionamiento 5V
Voltaje de Entrada (recomendado) 7-12V
Voltaje de entrada (los límites) 6-20V
56 Digital pines I / O 14 (6 de las cuales proporcionan una salida PWM)
6 Pines de entrada analógica
Corriente de I / S de CC Pin 40 mA
De corriente continua de 3,3 V Pin 50 mA
Memoria Flash 32 KB (ATmega328) de los cuales 0,5 KB utilizado por
gestor de arranque.
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Velocidad de reloj 16 MHz
Esquema de diseño de referencia y
EAGLE archivos: arduino-uno-Rev3-reference-design.zip (NOTA: trabaja
con Eagle 6.0 y posteriores)
Poder
El Uno Arduino puede ser alimentado a través de la conexión USB o con una
fuente de alimentación externa. La fuente de alimentación se selecciona
automáticamente.
Externo (no USB), el poder puede venir de un adaptador de CA a CC (en la pared
verruga) o la batería. El adaptador se puede conectar al conectar un centro de
2.1mm-positivo enchufe en toma de alimentación de la placa. Cables de la batería
se puede insertar en los encabezados de pin GND y Vin del conector de
alimentación.
La junta puede operar en un suministro externo de 6 a 20 voltios. Si se
57 menos de cinco voltios y la junta puede ser inestable. Si utiliza más de 12V, el
regulador de voltaje se puede sobrecalentar y dañar la placa. El rango
recomendado es de 7 a 12 voltios.
Los pines de alimentación son los siguientes:
VIN. El voltaje de entrada a la placa Arduino cuando se utiliza una fuente de
alimentación externa (a diferencia de 5 voltios de la conexión USB o de otra
fuente de alimentación regulada). Usted puede suministrar tensión a través de este
pin, o, si el suministro de tensión a través de la toma de poder, acceder a ella a
través de este pin.
5V. Este pin genera una 5V regulado por el regulador en el tablero. El tablero
puede ser alimentado ya sea desde la entrada de alimentación (7 - 12 V), el
conector USB (5V), o el pasador de VIN de la junta (7-12V). El suministro de
tensión a través de los pasadores de 5V o 3.3V no pasa por el regulador, y puede
dañar la placa. No se lo aconsejo.
3V3. Un suministro voltios 3,3 generada por el regulador de a bordo. Consumo
de corriente máxima es de 50 mA.
58 Memoria
El ATmega328 tiene 32 MB (con 0,5 KB utilizados para el gestor de arranque).
También dispone de 2 KB de SRAM y 1 KB de memoria EEPROM (que se puede
leer y escribir con la librería EEPROM ).
Entrada y salida
Cada uno de los 14 pines digitales en el Uno se puede utilizar como entrada o de
salida, usando pinMode () , digitalWrite () , y digitalRead () funciones. Ellos
operan a 5 voltios. Cada pin puede proporcionar o recibir un máximo de 40 mA y
tiene una interna de resistencia pull-up (desconectado por defecto) de 20 a 50
kOhm. Además, algunos pines tienen funciones especializadas:
Serie:. 0 (RX) y 1 (TX) Se utiliza para recibir (RX) y transmisión (TX) datos
serie TTL. Estos se encuentran conectadas a los pines correspondientes de la
ATmega8U2 USB-a-chip de serie TTL.
Interrupciones externas: 2 y 3 Estos pines pueden ser configurados para
activar una interrupción en un valor bajo, un flanco ascendente o descendente, o
un cambio en el valor. Ver la attachInterrupt () la función para más detalles.
PWM:. 3, 5, 6, 9, 10 y 11 Proporcionar 8-bits de salida PWM con la
analogWrite () función.
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) Se trata de las espigas de
59 LED: 13 Hay un built-in LED conectado al pin digital 13.. Cuando el pin es de
alto valor, el LED está encendido, cuando el pasador es bajo, es apagado.
El Uno tiene 6 entradas analógicas, etiquetados A0 a A5, cada una de las cuales
proporcionan 10 bits de resolución (es decir 1024 valores diferentes). Por defecto
miden desde el suelo a 5 voltios, aunque es posible cambiar el extremo superior
de su rango con el pasador y el AREF analogReference () función. Además,
algunos pines tienen funciones especializadas:
IST: A4 o A5 y pin SDA o SCL pasador de soporte de comunicación con el
IST. librería Wire .
AREF. Voltaje de referencia para las entradas analógicas. Se utiliza con
analogReference ().
Restablecer. Lleve esta línea LOW para reiniciar el microcontrolador.
Normalmente se utiliza para añadir un botón de reinicio para escudos que
bloquean el uno en el tablero.
Comunicación
El Uno Arduino tiene una serie de facilidades para comunicarse con un ordenador,
otro Arduino, u otros microcontroladores. El ATmega328 ofrece UART TTL (5V)
de comunicación en serie, que está disponible en los pines digitales 0 (RX) y 1
(TX). Un ATmega16U2 en los canales de comunicación a bordo esta serie a
través de USB y aparece como un puerto COM virtual con el software en el