Implementación de algoritmos de estimación de parámetros en línea
80
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. DASC. Digitally signed by DASC DN: cn=DASC, c=<n, o=UCLV, ou=FIE Date: 2015.06.19 11:59:08 -04'00'. TRABAJO DE DIPLOMA Implementación de algoritmos de estimación de parámetros en línea. Autor: Gustavo Otero López Email: [email protected]. Tutor: Dr. Ángel Ernesto Rubio Rodríguez Dpto. de Automática, Facultad de Ing. Eléctrica, UCLV Email: [email protected]. Santa Clara 2015 “Año 57 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. "La ciencia y la tecnología son la base para que el hombre evolucione como especie pensante, hacia su futuro.". Eric Cabrera Ake.
(5) ii. DEDICATORIA. A las personas que me han guiado por el camino correcto, a las cuales les debo lo que soy, en especial a mis padres y a mi hermana promotores de este sueño hecho realidad..
(6) iii. AGRADECIMIENTOS. Al Dr. Ángel Ernesto Rubio Rodríguez, tutor de esta tesis, donde sin su ayuda y colaboración no se hubiera concretado este trabajo A nuestros profesores que con su esfuerzo y dedicación durante estos años hicieron posible nuestra formación profesional. A mis amigos que han estado a mi lado y me han ayudado en todo momento. A todo el que de una forma u otra ha hecho posible la realización de este sueño. Y en especial: A mis padres por su constante esfuerzo y consagración. A mi hermanita por su preocupación. A toda mi gran familia, mis agradecimientos..
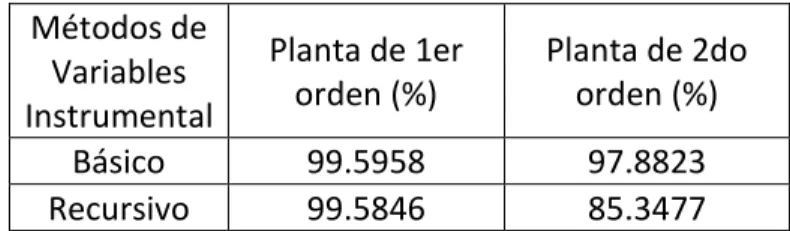
(7) iv. RESUMEN. Muchas aplicaciones de control requieren la estimación en línea del modelo de la planta, especialmente cuando este cambia según sean las condiciones en que se opere. Tal es el caso de los vehículos autónomos subacuáticos y aéreos, objetos de estudio del Grupo de Automatización Robótica y Percepción (GARP). Para la estimación en línea de los coeficientes de un modelo lineal la literatura describe, por ejemplo, el clásico Mínimos Cuadrados Recursivo. Este método tiene limitaciones que pueden atenuarse con modificaciones que dan lugar los métodos: Variable Instrumental y Mínimos Cuadrados Extendido. Este trabajo tiene como propósito general dotar al GARP con los códigos de la implementación de estos algoritmos. En primer lugar se realizó un análisis crítico de las potencialidades y limitaciones de los algoritmos de estimación en línea de modelos, haciéndose énfasis en sus descripciones matemáticas. Luego se implementó y validó estos algoritmos en el software MatLab, con los cuales se realizó la estimación del modelo de una planta real. Los resultados evidenciaron la superioridad de los Métodos Variable Instrumental y del Mínimos Cuadrados Extendido con respecto al Mínimos Cuadrados Clásicos, a partir del aumento de la complejidad del sistema, donde solo para primer orden las estimaciones fueron similares..
(8) v. TABLA DE CONTENIDOS PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii RESUMEN ............................................................................................................................iv TABLA DE CONTENIDOS .................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS ............................ 5. 1.1. Identificación de procesos ........................................................................................ 5. 1.2. Enfoques de Identificación ....................................................................................... 7. 1.3. Identificación Experimental mediante la respuesta a la señal escalón ..................... 8. 1.4. Identificación mediante el uso de señales aleatorias ................................................ 8. 1.4.1. Funciones de autocorrelación y correlación cruzada ........................................ 9. 1.4.2. Identificación mediante señales que se aproximan al ruido blanco ................ 10. 1.5. Identificación de modelos de sistemas ................................................................... 12. 1.5.1. Tipos de modelos ............................................................................................ 12. 1.5.2. Obtención del modelo paramétrico por diversos métodos.............................. 13. 1.6. Modelos de Sistemas .............................................................................................. 14. 1.6.1. Clasificación de Sistemas ............................................................................... 15. 1.6.2. Estructura del Sistema .................................................................................... 15. 1.7. Métodos de identificación ...................................................................................... 15. 1.8. Principio de identificación ..................................................................................... 17. 1.9. Ajuste de parámetros .............................................................................................. 17. 1.10. Proceso de identificación .................................................................................... 18.
(9) vi Consideraciones del capítulo ................................................................................................ 20 CAPÍTULO 2.. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS. CUADRADOS. 21. 2.1. Estructura del modelo ARX ................................................................................... 21. 2.2. Método de Mínimos Cuadrados para la estimación de los parámetros del modelo. ARX 26 2.3. Técnica del Olvido Exponencial ............................................................................ 30. 2.4. Algoritmo recursivo para la estimación mínimo cuadrático .................................. 32. 2.5. Modificaciones del MMC para la obtención de estimaciones insesgadas de los. parámetros ......................................................................................................................... 35 2.5.1. Método de la Variable Instrumental ............................................................... 36. 2.5.2. Método de Mínimos Cuadrados Extendidos ................................................... 41. Consideraciones del capítulo ................................................................................................ 43 CAPÍTULO 3.. ANÁLISIS DE LAS SIMULACIONES REALIZADAS EN MATLAB 44. 3.1. Estimación de una planta generada ........................................................................ 44. 3.1.1. Estimación mediante MMC ............................................................................ 45. 3.1.2. Estimación mediante el Metodo de Variable Instrumental (MVI) ................. 47. 3.1.3. Estimación mediante el Método de Mínimos Cuadrados Extendidos (MMCE) 49. 3.2. Estimación de una planta real. ............................................................................... 52. 3.2.1. Estimación mediante MMC ............................................................................ 52. 3.2.2. Estimación mediante el Método de Variable Instrumental (MVI) ................. 54. 3.2.3. Estimación mediante el Método de Mínimos Cuadrados Extendidos (MMCE) 55. 3.3. Análisis económico ................................................................................................ 56.
(10) vii Consideraciones del capítulo ................................................................................................ 58 CONCLUSIONES Y RECOMENDACIONES ................................................................... 59 Conclusiones ..................................................................................................................... 59 Recomendaciones ............................................................................................................. 60 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 61 ANEXOS .............................................................................................................................. 63 Anexo I. Implementación del MMC en sus versiones básicas y recursivas .................. 63. Anexo II. Implementación del MVI en sus versiones básicas y recursivas ................ 65. Anexo II. Implementación del MMC Extendido ......................................................... 68.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. A través de los años, la identificación de sistemas se ha convertido en una herramienta importante en la ingeniería y otras áreas tan diversas como medicina y economía, entre otras, que requieren de modelos que posibiliten el análisis, la simulación y el diseño e implementación de estrategias de control. Osorio Camargo (2013) En la actualidad la mayoría de las propuestas de sistemas de control están basadas en un modelo del proceso considerado y sujeto a parámetros determinados, por lo que el modelado y la identificación se convierten en etapas importantes en los diseños. Para satisfacer los requerimientos deseados en un proceso, el sistema de control debe garantizar la operación de este con un buen desempeño sobre un rango amplio de condiciones de operación. Las técnicas y modelos matemáticos utilizados comúnmente se basan en aproximaciones teóricas que no describen los procesos en su totalidad. Los modelos matemáticos de plantas o procesos son obtenidos mediante dos técnicas fundamentales, modelamiento e identificación, donde la identificación es la más utilizada al obtener modelos matemáticos en sistemas de control. Orjuela (2007) Para el desarrollo del modelo del sistema se utiliza información generada de un diseño de experimentos aplicados al sistema, lo que se conoce como identificación de sistemas. Una distinción general se realiza entre métodos en línea (on line) y fuera de línea. Los métodos en línea dan las estimaciones en forma recursiva, cuando se obtienen las medidas, y son la única alternativa si la identificación se va a utilizar en un controlador adaptativo o si el proceso es de tipo variable. En muchos casos los métodos de fuera de línea dan precisiones mayores y son más fiables, por ejemplo, en términos de convergencia. RÍOS and TORO (2006).
(12) INTRODUCCIÓN. 2. Muchas aplicaciones de control requieren la estimación en línea del modelo de la planta, especialmente cuando este cambia según sean las condiciones en que se opere. Tal es el caso de los vehículos autónomos subacuáticos y aéreos, objetos de estudio del Grupo de Automatización Robótica y Percepción (GARP). El MMC resulta sin dudas, uno de los enfoques básicos y más utilizados en la teoría y la práctica recientes de la identificación de procesos. Numerosos autores, tales como Peterka (1975) Eykhoff (1974) y muchos otros han dedicado un esfuerzo considerable al estudio de este método y sus diversas extensiones y modificaciones. Las razones son múltiples y bien fundamentadas: Aparte de su indudable atracción intuitiva, el MMC posee una serie de propiedades estadísticas muy convenientes y sobre todo, posibilita encontrar una forma recursiva suficientemente simple para implementarlo. Esta última posibilidad ha venido a ser la base de los llamados métodos de identificación en línea (on line) de procesos, que han alcanzado gran popularidad como resultado del desarrollo de los sistemas de control digital. Una de las hipótesis básicas en las que se sustenta el Método de Mínimos Cuadrados (MMC) para la identificación de modelos discretos lineales, es la suposición de que el término aleatorio tiene propiedades de ruido blanco no correlacionado. Pero en la práctica se ha demostrado la imposibilidad de que esta hipótesis pueda cumplirse estrictamente, donde esto trae como consecuencia que las estimaciones generadas por el MMC sean “sesgadas” o desviadas de los valores teóricos de los parámetros. El sesgo o desviación estará entonces relacionado con la intensidad o varianza del término aleatorio o ruido. Al tener en cuenta lo anterior, ha sido propuesto un numeroso grupo de algoritmos alternativos o modificaciones del MMC dirigidos a corregir las deficiencias teóricas de este método y obtener, en consecuencia, estimaciones insesgadas de los parámetros del modelo. Entre estos algoritmos podemos mencionar los siguientes: Variables Instrumentales y Mínimos Cuadrados Extendidos los cuales será objetivo sus implementaciones con la realización de este trabajo diploma. Problema científico: Para corregir las desviaciones presentes en la estimación de parámetros de procesos por el método de Mínimos Cuadrados Recursivos, se hace necesario introducir determinadas modificaciones bien descritas matemáticamente en la.
(13) INTRODUCCIÓN. 3. literatura. Sin embargo, no se cuenta con su descripción algorítmica en un lenguaje de programación de alto nivel, por lo que se carece del know-how de su implementación. Hipótesis: : Los Métodos Variables Instrumental y Mínimos Cuadrados Extendidos, modificaciones del MMC más utilizadas, pueden ser implementados con el software MatLab, herramienta seleccionada por sus potencialidades tanto en la implementación como en la simulación de estos métodos. Objetivo General: Programar en MatLab los algoritmos Variables Instrumental y Mínimos Cuadrados Extendidos para la obtención insesgada de los parámetros de los modelos a estimar. Objetivos Específicos: 1. Analizar críticamente las potencialidades y limitaciones de los algoritmos de estimación en línea de modelos dinámicos. 2. Describir matemáticamente los algoritmos básicos y recursivos de estimación, basados en mínimos cuadrados. 3. Implementar y validar en MatLab los algoritmos descritos anteriormente. 4. Estimar el modelo de una planta real conocida, con los algoritmos descritos anteriormente.. Tareas de Investigación: . Revisión de la literatura especializada en busca de toda la información relacionada con el tema de identificación de proceso y realizar un análisis crítico de los métodos más usados en la estimación de parámetros.. . Análisis del método de los Mínimos Cuadrados tanto en su versión básica como recursiva.. . Valoración de las posibles alternativas que se presentan como modificaciones para mejorar las estimaciones sesgadas por este método.. . Implementación en el software MatLab de las modificaciones escogidas (Variable Instrumental y Mínimos Cuadrados Extendidos).. . Validación por simulación de los métodos implementados en MatLab..
(14) INTRODUCCIÓN. . 4. Estimación de los parámetros de una planta real conocida con los métodos implementados.. Con este proyecto se pretende contribuir al desarrollo de las investigaciones llevadas a cabo por el GARP tal es el caso de los vehículos autónomos subacuáticos y aéreos, donde se brinda una herramienta para mejorar su desempeño. Ya que se puede contar con esta para la estimación en línea de parámetros, donde esto ha sido un problema ya que se carece de la implantación de algoritmos recursivos en el software MatLab. Los resultados de la realización de este proyecto es su gran aplicación práctica, ya que los especialistas e investigadores del GARP van a poseer una herramienta capaz de realizar estimaciones del proceso en pleno funcionamiento es decir en tiempo real. El proyecto es viable porque se cuenta con el presupuesto, los recursos materiales, el personal calificado para la realización del mismo y con la bibliografía necesaria para comenzar el trabajo. Metodología del trabajo: Para la realización del proyecto, el trabajo se dividirá en 3 capítulos, además de la introducción, conclusiones, recomendaciones, referencias bibliográficas y anexos correspondientes. La confección del informe se realizará a la par del desarrollo de las tareas técnicas. Introducción: Breve reseña, antecedentes, problemática, hipótesis, objetivos y tareas, además de la importancia, actualidad y necesidad del tema que se aborda. CAPÍTULO I: En este capítulo se va a realizar un bosquejo de los principales temas relacionados con la estimación de parámetros de sistemas, al utilizar la bibliografía complementaria. CAPÍTULO II: Análisis del MMC en especial de su versión recursiva y de sus modificaciones (Variable Instrumental, Mínimos Cuadrados Extendidos), donde se exponen sus algoritmos matemáticos y la implementación de estas modificaciones en el software MatLab. CAPÍTULO III: En este capítulo se analizará las simulaciones realizadas en el MatLab de los algoritmos implementados en el capítulo anterior. Donde es objetivo estimar los parámetros de una planta real..
(15) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 5. CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. En este capítulo se va a realizar un acercamiento al tema de la identificación de sistema, donde se analizará la estructura que presentan los métodos de estimación de parámetros, donde se hace énfasis en sus principales características. La conformación de la señal de excitación y el tema ruido blanco. En general todo lo relacionado al mundo de la estimación de modelos matemáticos que simulan procesos reales. 1.1. Identificación de procesos. El término identificación de procesos adoptado en el ámbito de los especialistas de Ingeniería de Control y Automatización, podría ser definido como el conjunto de estudios que permiten obtener la estructura y los parámetros de un modelo matemático que represente las variables de salida de un proceso o sistema real objeto de estudio ante el mismo conjunto de variables de entrada, lográndose esto con suficiente exactitud para los fines del control automático. Orjuela (2007) Los objetivos concretos que se persiguen mediante la identificación de un proceso determinado, pueden ser de 3 tipos, Aguado (2000) a saber: 1). Estudio preliminar de un proceso tecnológico, generalmente utilizándose técnicas de. simulación con vistas a diseñar el sistema de control, reducir el número de alternativas posibles y eventualmente hacer una estimación inicial aproximada de algunos parámetros del regulador. 2). Ajuste sobre la marcha de los parámetros del regulador sobre la base de una. identificación recursiva de los parámetros del modelo (Identificación on-line)..
(16) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 3). 6. Uso del modelo como parte del algoritmo de control, donde generalmente hace las. veces de predictor de salidas futuras. Un ejemplo simple de esto es el conocido Predictor de Smith para la compensación del retardo puro existente en muchos lazos de control. El tipo de modelo, la precisión requerida del mismo y los métodos de identificación a utilizar dependen fuertemente del objetivo que se persigue. Así, por ejemplo, para el primer objetivo son generalmente preferibles modelos continuos, bien en la forma de funciones transferenciales o en el espacio de estados. En muchos casos es suficiente contar con un modelo simple que sea capaz de reproducir con fidelidad algunas características esenciales del proceso como son la ganancia, el tiempo de retardo y las constantes de tiempo dominantes. Aguado (2000) Para el objetivo 2 se han popularizado los modelos discretos, al tener en cuenta el uso generalizado de los dispositivos digitales en el control de procesos (computadoras, autómatas programables, reguladores digitales). Con relación al tercer objetivo, se han utilizado tanto modelos continuos como discretos, en dependencia del método u algoritmo de control asociado. En los tres casos se supone generalmente la condición de linealidad, en primer lugar para evitar las graves dificultades asociadas a la teoría del control de procesos no lineales y además, porque la aproximación lineal resulta plausible en la mayoría de los casos. Aguado (2000) En ocasiones, sistemas que se excitan con las mismas variables de entrada en dos instantes diferentes, no producen las mismas respuestas. Aparece, pues, la necesidad de considerar la existencia de sistemas de parámetros variables con el tiempo. Este hecho introduce dos importantes variantes en la identificación: Orjuela (2007) 1). Fuera de línea, cuando se tiene la seguridad de que no van a producirse cambios a lo. largo del tiempo en la estructura y parámetros del modelo considerado. 2). En línea, cuando se desea reproducir más fielmente el comportamiento del proceso y. por tanto tienda a la reproducción exacta del mismo, bajo diferentes circunstancias..
(17) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 1.2. 7. Enfoques de Identificación. Al tener en cuenta los objetivos que se persiguen en la identificación, así como los recursos e información disponibles, se han utilizado distintos enfoques o métodos para este propósito, donde los principales son: Identificación Analítica, Identificación Experimental mediante señales especiales de prueba e Identificación Recursiva. A continuación se hará una breve discusión de cada uno de ellos. Orjuela (2007) Identificación Analítica. Consiste en desarrollar un modelo basado en las relaciones físico químicas del proceso por identificar, al plantear ecuaciones de balance de masa, de energía, etc. Este enfoque conduce generalmente a modelos complejos y no lineales que deben ser sometidos a un proceso de simplificación y linealización. El inconveniente principal de este enfoque consiste en que se requiere un conocimiento muy especializado sobre la tecnología del proceso, no siempre disponible. Identificación Experimental mediante Señales Especiales. Este enfoque resulta generalmente el más directo y el que puede producir resultados a más corto plazo. Las señales utilizadas con más frecuencia son los escalones y las llamadas secuencias binarias seudo-aleatorias. También se han hecho intentos con rampas, sinusoides, impulsos y otras. La restricción más importante de esta solución es la necesidad de introducir perturbaciones indeseables en el proceso que a menudo tropiezan con la resistencia de los operadores. En condiciones ideales, el experimento de identificación debería hacerse contándose con una computadora conectada en línea con el proceso, pero en la práctica, en muchas ocasiones, es necesario basarse en observaciones periódicas de las variables y el procesamiento fuera de línea de los datos. Identificación Recursiva. Se basa generalmente en una u otra modificación del método de mínimos cuadrados. Se asume una estructura fija del modelo que consiste casi siempre en una ecuación de diferencias lineales. Lo característico de este enfoque es que se parte de una estimación inicial, generalmente arbitraria, de los parámetros del modelo que se actualiza y mejora con cada nueva información obtenida. Aunque este tipo de identificación está concebida fundamentalmente para usarse dentro de un esquema de control adaptable se ha utilizado también, por razones de conveniencia práctica, para obtener modelos de simulación. Como los datos que se utilizan tienen generalmente la forma de secuencias.
(18) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 8. discretas de mediciones de las variables del proceso, los modelos que se identifican son también de naturaleza discreta. 1.3. Identificación Experimental mediante la respuesta a la señal escalón. La señal más simple que puede utilizarse para la identificación es, sin duda, la función escalón. Esta señal se aproxima, por ejemplo, mediante la apertura o cierre súbitos de una válvula, un cambio rápido de voltaje o corriente que alimenta a algún tipo de actuador eléctrico, etc. Un escalón ideal es una señal cuyo tiempo de crecimiento inicial es cero. Resulta obvio que tal señal no puede ser realizada físicamente, pues sería necesaria una energía infinita, sin embargo, si el tiempo de crecimiento inicial es varias veces más pequeño que el período correspondiente a la frecuencia máxima de interés, el error que se introduce en la identificación puede considerarse despreciable. Aguado (2000) La función escalón es la señal que más se ha aplicado en la práctica convencional del control automático y con ella se obtienen modelos sencillos suficientemente exactos, sobre todo en los casos de procesos monovariables simples y poco perturbados. 1.4. Identificación mediante el uso de señales aleatorias. Los primeros intentos de aplicar señales de naturaleza aleatoria en la identificación de procesos, especialmente aquellas que poseen características cercanas al llamado ruido blanco, surgieron casi desde el comienzo de esta disciplina. El fundamento teórico de este enfoque puede encontrarse en los trabajos clásicos de Wiener (1949) en especial la célebre ecuación de Wiener-Hopf, que establece la relación entre las funciones de autocorrelación y correlación cruzada de las variables de entrada y salida de un sistema lineal. La entrada de excitación al sistema debe ser cuidadosamente elegida de forma que los datos recogidos proporcionen toda la información posible sobre su dinámica. Para ello, conviene tener en cuenta los siguientes aspectos: . La señal de entrada debe tener componentes de frecuencias que exciten todo el ancho de banda del sistema. Por ejemplo, una señal sinusoidal pura no es adecuada en un experimento de identificación, puesto que solo se obtendrá la respuesta del sistema para la frecuencia de dicha señal. Por el contrario, las señales escalonadas (con.
(19) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 9. cambios bruscos) son muy utilizadas, pues contienen un espectro suficientemente amplio de frecuencias. . Para sistemas lineales, basta con utilizar dos niveles de entrada, preferiblemente al barrer todo el rango de variación permitido. En este tipo de sistemas se suelen utilizar señales binarias de duración aleatoria (conocidas como señales binarias aleatorias o Pseudo-aleatorias). Sin embargo, para sistemas no lineales es necesario trabajar con más de dos niveles de entrada. Ljung (1999). . Las señales aleatorias poseen con respecto a otras, como el escalón, la ventaja de que su amplitud puede ser muy pequeña, reduciéndose por tanto el grado de perturbación que se introduce en la planta objeto de identificación. Por otra parte, estas señales pueden superponerse a los valores normales de la variable de entrada, independientemente de las variaciones de esta, sin que se afecte, al menos teóricamente, el proceso de identificación. En este epígrafe se analizará algunas señales aleatorias que han sido utilizadas con éxito en la práctica, especialmente las secuencias binarias seudo-aleatorias, no sin antes introducir algunos conceptos y relaciones básicas.. 1.4.1 Funciones de autocorrelación y correlación cruzada La función de autocorrelación de una variable. , determinística o aleatoria, esta función. sirve para caracterizar el grado de variabilidad o inercia de una señal. En el límite teórico, cuando. es un ruido blanco, la función de autocorrelación es igual a la Delta de Dirac.. El conocimiento de la respuesta impulsiva de un sistema lineal. , constituye una. identificación no paramétrica del mismo, En efecto, mediante el cálculo de la integral de convolución (o su equivalente discretizada) puede calcularse la respuesta del sistema a cualquier estímulo. Por otra parte la función de peso. , obtenida en la forma de una. curva o tabla de valores, puede ser parametrizada fácilmente, si esto fuera de interés, al utilizarse algún procedimiento derivado del método de mínimos cuadrados. El problema de la identificación de un sistema mediante la aplicación de señales aleatorias, consiste en utilizar alguna que se aproxime suficientemente al ruido blanco , calcular la función de correlación cruzada función de peso resultante. y eventualmente parametrizar la. si esto resulta conveniente..
(20) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 10. 1.4.2 Identificación mediante señales que se aproximan al ruido blanco Como es conocido, el ruido blanco es una señal hipotética que no puede ser físicamente realizada, puesto que su espectro de frecuencias es infinito. No obstante, si se genera una señal de ruido cuyo ancho de banda es bastante mayor que el del sistema a identificar, a los efectos prácticos dicha señal se comporta como el ruido blanco y puede utilizarse para la identificación con un error despreciable. Al hablar en términos del dominio del tiempo, eso significa que la señal de autocorrelación de la señal aleatoria o ruido debe aproximarse suficientemente a la Delta de Dirac. Existen al menos 2 tipos de señales que poseen esa propiedad: Ruido analógico o discreto con un espectro de frecuencia mucho mayor que el ancho de banda del sistema. Secuencias binarias seudo-aleatorias (PRBS). La generación de ruido analógico requiere de un equipamiento especial y generalmente costoso y el ruido discreto puede simularse fácilmente mediante cualquier generador de números aleatorios, pero requiere necesariamente de una computadora conectada en línea. Esos inconvenientes de naturaleza práctica han reforzado el interés que presentan las PRBS, cuya aplicación es fácilmente realizable, bien al actuar manualmente o al utilizar una computadora conectada en línea con el proceso, en dependencia de las características dinámicas de éste. Convirtiéndose en un método alternativo, al utilizar señales de identificación que puedan generar datos informativos cuando la relación señal-ruido es baja. Godfrey (1993). La PRBS (Pseudo Random Binary Sequence) es una señal binaria Pseudo aleatoria, que tiene un espectro de frecuencias controlado por el usuario Ljung (1998). Esta señal se aplica a la entrada del sistema hasta provocar una excitación persistente de forma que los datos recogidos proporcionen toda la información posible sobre la dinámica de la planta. Es conveniente, dejar sentada una propiedad que es común a todas las señales especiales de ruido, a las que se ha hecho referencia anteriormente: La señal aleatoria o seudo-aleatoria que se utiliza para la identificación, puede superponerse sobre los valores normales de operación de la variable de entrada, sin que esto afecte sensiblemente al proceso de identificación..
(21) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 11. Las PRBS son señales periódicas cuyas integrales de autocorrelación se aproximan satisfactoriamente a la función Delta de Dirac. Graupe (1976) ; Briggs (1965). Las PRBS se codifican mediante secuencias de ceros y unos que satisfacen una ecuación de diferencias del tipo:. Operador de retardo, de manera que. .. Operador de suma módulo 2. Variable binaria que asume valores 0 o 1. Coeficientes binarios que asume también valores 0 o 1. Orden de la secuencia. Aunque las PRBS fueron concebidas inicialmente para la identificación de la respuesta impulsiva del sistema, ellas pueden aplicarse también ventajosamente para la identificación de otros tipos de modelos. La utilización práctica de estas secuencias consiste en la asignación de 2 valores de la variable de control, por ejemplo, posiciones de una válvula, que corresponden al 0 y al 1. Estos 2 valores deben ser simétricos con respecto a la posición normal del elemento de control, de manera que el efecto neto o promedio de la perturbación introducida al final del experimento sea cero. Las desviaciones con respecto al punto de operación pueden ser muy pequeñas sin que disminuya la efectividad de la perturbación aplicada. Aguado (2000) Una secuencia PRBS conduce a operaciones amigables con la planta, ya que es posible diseñar un experimento con una relación señal-ruido más baja que en el caso de un ensayo de un único salto en escalón. Sin embargo, la estimación de modelos a partir de datos producidos mediante una señal PRBS requiere técnicas más sofisticadas que los métodos gráficos que se aplican normalmente a la curva de reacción de un proceso. Franco and Flecha (2005) Para desarrollar el proceso de identificación del sistema es necesario registrar la señal obtenida a la salida después de ser excitado por la PRBS. Con ambas señales y al aplicar los métodos de estimación de parámetros, se determina el modelo dinámico discreto que las correlacione adecuadamente. Rubio (2009).
(22) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 1.5. 12. Identificación de modelos de sistemas. Podemos definir la identificación de sistemas, como los estudios de técnicas que persiguen la obtención de modelos matemáticos de sistemas dinámicos a partir de mediciones realizadas en el proceso: entradas o variables de control, salidas o variables controladas y perturbaciones Figura 1-1.. Figura 1-1 Proceso de identificación sobre un sistema para la obtención de un modelo matemático, mediante la realización de mediciones y captura de datos en el sistema.. El enfoque de la identificación se puede realizar en función de la estructura del modelo, y del comportamiento físico o no del mismo. Podemos distinguir: Black-box: los parámetros del modelo no tienen una interpretación física. Un modelo basado en leyes fundamentales es muy complicado o se desconoce. Gray-box: algunas partes del sistema son modeladas basándose en principios fundamentales, y otras como una caja negra. Algunos de los parámetros del modelo pueden tener una interpretación física; a este tipo de modelos también se les conoce como “Tailor-made”, donde estima sólo los parámetros no conocidos. White-box: la estructura del modelo se obtiene a partir de leyes fundamentales. Los parámetros tienen una interpretación física. 1.5.1 Tipos de modelos “La identificación de sistemas es la teoría y el arte de construir modelos matemáticos de sistemas dinámicos basándose en las entradas y salidas observadas”. BENNETT (1982) Para realizar el control de sistemas dinámicos es necesario conocer un modelo que describa la dinámica de dicho sistema; este modelo se obtiene al ajustar los parámetros de la planta a un conjunto de ecuaciones capaces de detallar el comportamiento de la misma. Godoy Ortega (2011).
(23) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 13. Existen varias formas de catalogar los modelos matemáticos Ljung (1999): deterministas o estocásticos, dinámicos o estáticos, de parámetros distribuidos o concentrados, lineales o no lineales, y de tiempo continuo o tiempo discreto: 1.. Modelos mentales. Sin formalismo matemático.. 2.. Modelos no paramétricos. Se caracterizan mediante gráficos, diagramas o representaciones que describen las propiedades dinámicas mediante un número no finito de parámetros, i.e., respuesta al impulso, al escalón, o en frecuencia.. 3.. Modelos paramétricos o matemáticos. Describen las relaciones entre las variables del sistema mediante expresiones matemáticas; ecuaciones diferenciales en sistemas continuos y ecuaciones de diferencias en sistemas discretos.. 1.5.2 Obtención del modelo paramétrico por diversos métodos Los modelos paramétricos quedan descritos mediante una estructura y un número finito de parámetros que relacionan las señales de interés del sistema (entradas, salida y perturbaciones). Generalmente estos modelos permiten describir el comportamiento de cualquier sistema lineal. La dificultad radica en la elección del tipo de modelo (estructura, número de parámetros, etc.) que se ajuste satisfactoriamente a los datos de entrada-salida obtenidos experimentalmente. Algunos de los métodos más usados con los cuales se puede lograr una correcta identificación del sistema. La ecuación genérica que devuelve los modelos paramétricos ARMAX, ARX, OE y BJ, es de la forma: (Juditsky et al. (1995)). ARX (Auto Regressive and Exogenous Variable). Estructura auto-regresiva con variables exógenas, suponiéndose un ruido blanco de media cero y varianza constante. Se resuelve directamente por el algoritmo de mínimos cuadrados, que responda a la forma:.
(24) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 14. ARMAX (Auto Regressive Moving Average and Exogenous Variable). Estructura auto-regresiva con variables exógenas, suponiéndose un ruido blanco de media cero y varianza constante afectado por un filtro de media móvil. Se resuelve al minimizar el error de predicción de forma iterativa y aplicar el algoritmo de mínimos cuadrados extendido. Donde responde a la siguiente forma:. OE (Output Error). Estructura auto-regresiva con variables exógenas, que solo afecta a la relación entrada-salida (no perturbada) con un ruido blanco aditivo. Se resuelve con un algoritmo similar al ARMAX al modificar el cálculo del error de predicción y el gradiente. Donde responda a la forma:. BJ (Box-Jenkins). Estructura auto-regresiva con variables exógenas, cuya parte determinista no tiene coeficientes comunes con la estocástica. Se resuelve con un algoritmo similar al ARMAX al modificar el cálculo del error de predicción y el gradiente. Al responder a la forma:. 1.6. Modelos de Sistemas. El modelo del sistema debe entenderse, no sólo en el contexto industrial, se extiende por el resto de sectores y campos del conocimiento como: bioingeniería, economía, termodinámica, organización, construcción…, y su uso va desde el control y la supervisión, hasta la optimización y la predicción, al pasar por el diagnóstico y la innovación en sistemas. Franco and Flecha (2005) La mejora continua, y las innovaciones en procesos, hacen necesario el desarrollo de herramientas que ayuden al operador humano en las tareas de supervisión, tareas destinadas a la detección y diagnosis de fallos, al comparar el proceso con un modelo de simulación; éstos son los métodos llamados de diagnóstico. Uno de los mayores expertos en este conocimiento, L. Ljung nos dice: “En la actualidad, cada vez más, el trabajo de un ingeniero consiste en la realización de modelos matemáticos”. Godoy Ortega (2011).
(25) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 15. 1.6.1 Clasificación de Sistemas En función del tipo de sistema y de la representación matemática utilizada, los sistemas pueden clasificarse en: Franco and Flecha (2005) Determinísticos o estocásticos: se dice que un modelo es determinístico, cuando expresa la relación entre entradas y salidas mediante una ecuación exacta; se estudia la relación entre la entrada y la salida con una parte no conocida. Por contra, un modelo es estocástico si posee un cierto grado de incertidumbre. Quedan definidos mediante conceptos probabilísticos o estadísticos. Dinámicos o estáticos: un sistema es estático cuando la salida depende únicamente de la entrada en ese instante de tiempo. La función que relaciona las entradas con las salidas, es independiente del tiempo. En un sistema dinámico las salidas varían con el tiempo, el valor actual de la salida en función del tiempo transcurrido desde la aplicación de la entrada. Tienen como objetivo conocer el comportamiento dinámico de un proceso. Continuos o discretos: los sistemas continuos trabajan con señales continuas, se formalizan mediante ecuaciones diferenciales. Los sistemas discretos trabajan con señales muestreadas, se describen por medio de ecuaciones en diferencias. De parámetros concentrados: no se considera la variación en función del espacio. Lineales o no lineales: un sistema lineal se define por una función matemática lineal ; siendo. no lineal.. 1.6.2 Estructura del Sistema Para realizar la modelización, es necesario partir de una observación de datos, compuesta de una salida en un instante de tiempo tiempo. , obtenida a partir de una excitación en el mismo. . Por consiguiente, el grupo de observación estará formado por una colección. finita de muestras: Franco and Flecha (2005) { 1.7. }. {[. ]|. }. Métodos de identificación. Los métodos de identificación tienen, como fin, encontrar un modelo matemático que nos relacione las colecciones de muestras de salidas con las de entrada..
(26) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 16. Las técnicas de identificación no paramétricas en el caso de sistemas lineales o linealizables, entre otras son: Godoy Ortega (2011) Análisis de la respuesta transitoria: consiste en obtener la respuesta del sistema a un impulso o a un escalón. Análisis de correlación: pertenece al dominio temporal, se obtiene la función de correlación entre las variables de entrada y salida. Análisis en frecuencia: son utilizadas directamente para estimar la respuesta frecuencial del sistema. Se determina mediante el análisis de Fourier o el análisis espectral, al depender de la forma de las señales de entrada. Paramétricos Dado. , datos obtenidos por muestreo, en un sistema lineal y estacionario (SLE),. entendiéndose por: Estacionario. Igual respuesta ante una entrada, independientemente del instante de aplicación. Lineal. Si la respuesta a una combinación de entradas, es idéntica a la combinación lineal de las respuestas de las entradas. La Identificación Paramétrica se puede realizar en forma Off Line, es decir que el computador simplemente es una herramienta que sirve para el cálculo de los parámetros buscados y no forma parte del lazo de control. En esta técnica se debe tomar en cuenta una estructura para el modelo, cuyos parámetros son calculables mediante ciertos criterios que se dan entre el proceso como tal y el sistema modelado. Godoy Ortega (2011) Las técnicas utilizadas para la identificación paramétrica son: En el dominio del tiempo: Minimiza el error temporal entre el proceso y el modelo del mismo. En el dominio de la frecuencia: Minimiza el error entre la respuesta de frecuencia real del proceso y la respuesta de frecuencia del modelo. En la Identificación Paramétrica en Sistemas, se toman en cuenta principalmente dos técnicas: determinísticas y estocásticas. Godoy Ortega (2011).
(27) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 17. Las técnicas determinísticas logran identificación a partir de la respuesta de frecuencia ante señales de entrada sinusoidales; y en el dominio del tiempo, las señales de entrada son funciones paso o impulso. Las técnicas estocásticas logran identificación a partir de la respuesta de frecuencia y el dominio del tiempo con señales de entrada aleatorias. La Identificación Paramétrica se puede programar On Line, es decir la PC está en el lazo de control por lo que se denomina Control en Tiempo Real. Las técnicas de identificación paramétricas se pueden realizar en el dominio temporal, estimación de modelos discretos (Z) o frecuencial, estimación de modelos continuos o discretos (S y Z). Ambas se refieren a la minimización del error: Error entre respuesta en frecuencia del sistema y del modelo. Error de predicción y error de salida entre el sistema y el modelo. 1.8. Principio de identificación. El criterio de identificación consiste en evaluar quién de la familia de modelos candidatos se adapta y describe mejor la observación de los datos. Por consiguiente, la esencia del modelo, será su característica de predicción. Franco and Flecha (2005) Según Ljung (1999), un buen modelo será el que tenga una buena predicción, eso es, aquel que produzca pequeños errores, cuando se le apliquen los datos observados. 1.9. Ajuste de parámetros. Además del método de mínimos cuadrados y las soluciones al mismo existen otra serie de métodos para el ajuste de parámetros, detallados a continuación. Franco and Flecha (2005) Método de mínimos cuadrados generalizado (GLS), (Åström and Eykhoff, 1971); elimina el inconveniente del método de mínimos cuadrados en lo relativo a la no convergencia de su algoritmo, si la perturbación no es blanca. Método de la variable instrumento (IV), consistente en multiplicar la función. , por. un vector llamado instrumento independiente del ruido, pero muy dependiente del vector de regresión. .. Método de la máxima probabilidad (ML); su fundamento es construir una función de probabilidad, para relacionar datos con parámetros desconocidos. La función de.
(28) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 18. probabilidad es una función de densidad de probabilidad y la estimación se resuelve al maximizar dicha función. Método de predicción de error; consiste en predecir el valor de salida. , en función. de las entradas y salidas al sistema en los estados anteriores, éste será la diferencia entre el Método recursivo para la estimación de parámetros, los calculan a partir de los. , utilizándose los nuevos. ,. estimados, se. donde se permite una. fácil adaptación a los sistemas variantes en el tiempo, los cuales son utilizados en control adaptativo y diagnosis. El Filtro Kalman es un algoritmo recursivo, que realiza estimaciones tanto de estados presentes, pasados y futuros, mediante la solución de la estima de mínimos cuadrados. 1.10 Proceso de identificación El proceso de identificación consta de una serie de pautas y decisiones con el objeto de que el modelo final sea representativo del modelo identificado; éstas son: Franco and Flecha (2005) . Diseño de experimentos: para la obtención de datos de entrada-salida, deberán realizarse experimentos informativos, los datos de un grupo M* de modelos pueden ser discriminados entre dos modelos del grupo; para ello, debe excitarse el sistema con señales lo suficientemente ricas, insistentemente excitadas;. es persistentemente. excitada de orden n. La elección de las señales se hará teniendo en cuenta: 1. Las propiedades asintóticas de la estima (bias y variance) sólo dependen del espectro de entrada y no de la forma de onda de la señal. . .. Bias (desvío): errores sistemáticos causados por características de la señal de entrada, elección de la estructura de modelo (complejidad de la representación) y modo de operación (lazo cerrado o lazo abierto).. . Variance (varianza): errores aleatorios introducidos por la presencia de ruido en los datos, que impiden que el modelo reproduzca exactamente la salida. Está afectado por los siguientes factores: número de parámetros del modelo, duración del experimento de identificación, relación señal-ruido.. 2. La entrada debe de estar limitada en amplitud..
(29) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 19. 3. El orden de la señal, persistentemente excitada, tiene que ser mayor o igual al número de parámetros que van a ser estimados. 4. Las señales periódicas tienen ciertas ventajas. Observación de datos: será el paso previo antes de realizar la estimación de los parámetros, ya que los datos capturados poseen deficiencias que deberán ser tratadas para una correcta utilización de los modelos citados anteriormente; este tratamiento consistirá: eliminación de pérdida de datos (missing), datos erróneos (outliers), variaciones de tendencia (detrending), estacionalidad (seasonal), impulsos (drifts), señales de offsets, perturbaciones de alta frecuencia, tratamiento de niveles. Selección de la estructura del modelo: es la fase donde se hace necesario el definir el modelo a emplear: black-box, gray-box, white-box, modelo lineal o no lineal, recursivo o no recursivo, modelos en tiempo continuo o discreto, operación on-line (estimación en tiempo real) u operación off-line (a posteriori), modelos paramétricos, etc. Selección del modelo y estimación de parámetros: consistirá en elegir un modelo dentro del grupo que mejor se adapte a los datos, básicamente consistirá en minimizar la función de error de predicción del modelo, y determinar la estimación de los parámetros que minimice el criterio anterior. Validación del modelo: es la fase donde se comprueba la calidad del modelo, y cómo es capaz de reproducir nuevos grupos de datos; en este sentido, será necesario probar con diferentes órdenes y estructuras en base a unos criterios: a la aplicación del modelo (simulación, predicción, diseño); a la comprobación física de los parámetros, si existe un conocimiento a priori; a la caracterización del comportamiento entrada-salida, al comprobarse las dinámicas del sistema; a la fiabilidad de los parámetros estimados, conociéndose sus índices de desviación estándar..
(30) CAPÍTULO 1. TEMAS DE IDENTIFICACIÓN DE PARÁMETROS. 20. Consideraciones del capítulo La identificación de sistemas, es una técnica que tiene por objeto, la obtención de modelos matemáticos de sistemas dinámicos, a partir de mediciones realizadas en el proceso; para ello, existe una metodología que consta de una serie de etapas, pautas y decisiones, donde se tiene como fin, que el modelo resultante sea representativo del modelo identificado. Este procedimiento de identificación, va desde el diseño del experimento, la adquisición y tratamiento de los datos, la elección de la estructura del modelo y la selección de los parámetros, hasta concluir con la fase de validación del modelo. Es necesario apuntar que, para conseguir una coherencia de estimación, todos los pasos citados deben tratarse con el mismo orden y rigor; y descuidos en consideraciones sobre ellos, provocarán inexactitudes y comportamientos erróneos del modelo final..
(31) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 21. CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. Karl Friedrich Gauss fue quien formuló el principio de los mínimos cuadrados a finales del siglo XVIII, y lo utilizó para determinar las órbitas de los planetas y los asteroides. En el capítulo se discutirá en detalle el método de mínimos cuadrados, tanto su versión convencional como varias modificaciones orientadas a mejorar la precisión del MMC cuando los datos utilizados están contaminados con ruido. El capítulo está organizado en la forma siguiente: En 2.1 se introduce el modelo ARX en sus formas posibles, ya que es la estructura básica utilizada para aplicar los métodos de identificación en línea. En 2.2 se aplica el método general de mínimos cuadrados al modelo ARX y se obtienen expresiones para la estimación óptima de los parámetros así como de la matriz de covarianza de la estimación. En 2.3 se discute una técnica heurística de extrema utilidad para la aplicación del método de mínimos cuadrados en tiempo real: la llamada Técnica del Olvido Exponencial. En 2.4 se deriva en detalle el algoritmo recursivo mínimo cuadrático convencional y se discuten las bondades y limitaciones de este método. En 2.5 se introducen las modificaciones del MMC que tienen como objetivo la obtención de estimaciones insesgadas de los parámetros: Variables Instrumentales y Mínimos Cuadrados Extendidos. 2.1. Estructura del modelo ARX. En el esquema de la Figura 2-1 se representa en forma simplificada una planta de una entrada y una salida, con un ruido aditivo. en esta última..
(32) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 22. Figura 2-1 . Planta con ruido aditivo a la salida. Al suponer que la entrada y la salida de la planta representada son accesibles, es decir, pueden ser medidas con un período de muestreo T. Independientemente de que el sistema original P puede ser continuo, para describir el comportamiento dinámico de un conjunto discreto de mediciones de su entrada y su salida, tomadas durante un cierto número de intervalos de tiempo T, es posible en muchos casos, asumir el siguiente modelo lineal en diferencias:. ∑. ∑. Donde los índices. (2.1). se utilizan, en aras de la simplicidad de la. notación, en lugar de. . El modelo discreto definido en ((2.1),. consta de tres partes fundamentales: una autoregresión de los valores anteriores de la salida hasta. , una suma de valores previos de la entrada hasta. componente estocástica El término. y una. .. es un proceso estocástico al que pueden atribuirse varias interpretaciones.. Desde el punto de vista puramente estadístico, este término generalmente se interpreta como el residuo o efecto no considerado en el modelo ARX. Mirado desde la óptica de los sistemas de control, el proceso. puede asociarse al ruido o indeterminación presente en. la planta. Como este ruido no es medible, el cálculo de proceso. a partir del modelo, puede. servir como una estimación del mismo. El hecho de suponer a priori la presencia del ruido, sitúa en un plano más cercano a la realidad la identificación del proceso. En efecto, esto significa que se admite que el modelo asumido no es exacto, que refleja sólo parcialmente el proceso y que factores tales como la no linealidad, la imprecisión de las mediciones, la.
(33) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 23. presencia de perturbaciones no consideradas explícitamente, etc., influyen sobre la salida. Todos estos efectos y muchas otras fuentes posibles de imprecisión, se engloban en el término proceso. considerado como ruido.. Al término del proceso. , que en lo sucesivo será denominado ruido del modelo, se le. atribuyen generalmente las siguientes propiedades estadísticas, para { {. }. (2.2). }. (2.3). }. (2.4). { {. }. {. }. (2.5). Donde el operador { } simboliza a la Esperanza Matemática que puede interpretarse como el ¨valor más esperado¨ o en muchos casos ¨valor medio¨ de la variable o función en el argumento. Entonces, varianza constante. se considera un proceso de ruido blanco, con media cero y , no correlacionado con la entrada o salida del proceso. El modelo. (2.1) puede escribirse también en la forma: (2.6). ̂ ̂ El término ̂. ∑. ∑. (2.7). en la expresión (2.7) puede interpretarse entonces como la predicción de la. salida en el tiempo k, a partir de las mediciones anteriores. ,. y los parámetros del modelo. Nótese que de acuerdo con (2.6) y (2.7) se cumple: {. }. ̂. (2.8). Una manera alternativa de expresar el modelo (2.1) muy usada en la literatura, resulta de introducir el operador de retardo. , definido como sigue: (2.9).
(34) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 24. Definiéndose además los polinomios: (2.10) (2.11) Se puede escribir entonces el modelo ARX en la forma: (. (2.12). ). (2.13). El segundo término de la parte derecha de la ecuación (2.13) puede identificarse con el ruido aditivo. que aparece en la Figura 2-1.. Esta última forma del modelo ARX pone en evidencia un hecho de gran importancia para la identificación de los parámetros del modelo (2.1) o (2.13) y es que el ruido resultante que actúa sobre la salida no satisface generalmente las condiciones de ruido blanco no correlacionado supuestas en (2.4) y (2.5). En efecto, el término estocástico del modelo (2.13) es un ruido filtrado a través de la función transferencial La ecuación (2.13) puede escribirse entonces:. (2.14). (2.15). ∑. (2.16). Al resumir el análisis anterior se puede afirmar que aun cuando al ruido del modelo. se. le atribuyan las propiedades del ruido blanco no correlacionado, el ruido resultante sobre la salida de la planta no cumple en general con esas condiciones..
(35) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 25. Se va ahora a introducir otra forma del modelo ARX que será de extrema utilidad cuando se estudien los algoritmos recursivos de identificación. La ecuación (2.1) puede, en efecto, escribirse de la siguiente forma más compacta: (2.17) Donde. y. son respectivamente los vectores de los parámetros y de las mediciones.. Ambos pueden definirse de varias formas; una muy conveniente desde el punto de vista de los algoritmos de identificación en línea, es la siguiente: [. (2.18). ]. [ y. (2.19). ]. son vectores de dimensión 2n+1.. El modelo (2.17) puede expresarse en forma generalizada para t observaciones del par entrada-salida (u, y) como sigue: (2.20) [. (2.21). ]. (2.22). [. ]. Es la matriz de las mediciones de dimensión (2n+1)*t. También:. [. (2.23). ]. Es el vector de ruido de dimensión t. Una observación se refiere a la inclusión de. en el modelo que se propone, es decir, la. admisión implícita de que el valor de la variable de entrada el mismo tiempo. influye sobre la salida en. . Se ha adoptado la convención que se ilustra en la Figura 2-2..
(36) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 26. Figura 2-2 . Orden supuesto de las mediciones. Donde se supone que la variable de entrada se mide (o se calcula) antes de la salida y aunque ambas se denotan con el mismo índice. ,. o. ,. etc., en. realidad corresponden a tiempos distintos, al mediar entre ellos, como mínimo, el tiempo necesario para la medición de la variable de entrada. . Ese tiempo, desde luego, debe. ser mucho menor que el período de muestreo. Desde el punto de vista ilustrado en la Figura 2-2, resulta entonces admisible y además conveniente, la inclusión del coeficiente. 2.2. en el modelo ARX.. Método de Mínimos Cuadrados para la estimación de los parámetros del modelo ARX. Se puede considerar el modelo ARX para sistemas de una entrada y una salida, correspondiente a t mediciones: (2.24) Donde ,. y. se definen en (2.17), (2.20), (2.21) y (2.22). El vector de las. salidas puede considerarse como un vector aleatorio que tiene las siguientes propiedades estadísticas: { {. (2.25). } }. {. }. (2.26). Donde I es la matriz unitaria. La estimación de los parámetros contenidos en el vector P, al utilizar el MMC, consiste en hallar un estimador ̂ tal que minimice la forma cuadrática: (. ). (2.27).
(37) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 27. Donde W es una matriz definida positiva arbitraria llamada matriz de peso, que puede asumir distintas formas especiales, donde se provoca diversas modificaciones del MMC. Nótese que para darle mayor generalidad al problema se considera que los parámetros pueden variar con el tiempo. El caso más simple y que será objeto de nuestro interés inmediato, consiste en considerar W = I. Entonces, el criterio J puede también escribirse: (2.28). ∑ La minimización del criterio J con respecto a. puede realizarse al seguir un. procedimiento analítico. En efecto, al desarrollar a (2.26) con W = I, se llega a:. (2.29). Pero. pues se trata de un escalar y entonces: (2.30). Derivándose la expresión (2.30) con respecto a. e igualándola a cero, se obtiene: (2.31). Y de (2.31) se obtiene la expresión del estimador mínimo cuadrático que tiene la forma: ̂ La segunda derivada menos semidefinida positiva. (. (2.32). ). como puede deducirse fácilmente de (2.31), es la matriz al , lo cual es una condición suficiente para que la. expresión (2.32) minimice efectivamente a J. Nótese que la existencia del estimador óptimo ̂. está condicionada a que la matriz cuadrada. de dimensión 2n+1 sea. invertible. Esta última condición equivale a su vez, a que la matriz (2n+1), sea de rango 2n+1.. de dimensión t x.
(38) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. La necesidad de que la matriz. 28. sea de rango completo, lleva a profundizar un tanto en. los requerimientos que deben cumplir las señales de entrada u. a fin de que el sistema sea. identificable. (Åström and Eykhoff, 1971), Introducen el concepto de excitación persistente y lo consideran un requerimiento indispensable para que sea posible obtener un estimador mínimo cuadrático único de los parámetros de la planta. Este concepto puede expresarse en la forma siguiente: Un sistema se encuentra sometido a una excitación persistente si existen los límites:. ̅. (2.33). ∑. ∑[ Además la matriz definida por:. ̅][ {. ̅] }. (2.34). (2.35). Es definida positiva. La condición de excitación persistente asegura no solamente que la matriz. sea de. rango completo sino también que la estimación de los parámetros del modelo mediante el MMC sea estadísticamente consistente. Debe señalarse, sin embargo, que en adición a la condición de excitación persistente generalmente se requiere que las señales de entrada utilizadas sean perturbantes, es decir, que su espectro de frecuencias sea suficientemente amplio, de manera que las frecuencias fundamentales del sistema sean perturbadas. Esta última condición, sin embargo, no resulta necesaria desde el punto de vista de la existencia de un estimador mínimo cuadrático de los parámetros del proceso. En un plano intuitivo, las condiciones de persistencia y perturbación pueden interpretarse como el requerimiento de que la variable de entrada sea suficientemente diversa para poder identificar adecuadamente al proceso. En un caso límite, si la variable de entrada permanece constante durante el tiempo de la identificación, todas las filas y columnas de la matriz inversible.. serían iguales, su rango sería 1 y evidentemente la matriz. no sería.
(39) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 29. Resulta pertinente hacer un análisis de algunas propiedades del estimador mínimo cuadrático de los parámetros, cuya expresión se obtuvo en (2.32). La esperanza matemática del estimador, viene dada por: {̂. }. {(. La matriz de mediciones. ). (2.36). }. , contiene valores de. , para. tal como puede apreciarse en (2.22). Las variables de salida contienen términos de ruido (. ). a su vez. y por tanto, el producto de matrices. que es una seudoinversa de. , contiene funciones de la secuencia. , para i=1, 2,..., n. Si se parte de la suposición de que el ruido. es blanco. (ecuaciones (2.4) y (2.5)), puede demostrarse que la esperanza matemática de los términos aleatorios presentes en la seudoinversa de forma además. , donde f es una función no lineal de la secuencia. y. . Por otra parte, al admitir la no correlación de los términos aleatorios. presentes en ( blanco para. es cero. Estos términos tienen en general la. ). e. , consecuencia también de la suposición de ruido. , la expresión (2.36) puede escribirse: {̂. }. (. ). {. }. (2.37). Pero de acuerdo con (2.30) se cumple: { Entonces:. {̂. (2.38). } }. (. ). (2.39). La ecuación (2.39) confirma el resultado conocido de que, bajo la suposición de ruido blanco para la secuencia. , la estimación de los parámetros del modelo ARX mediante. el MMC es estadísticamente insesgada. Es conveniente recalcar el hecho de que los estimadores obtenidos son insesgados en el sentido estadístico si y sólo si, se cumple la condición de que el ruido. sea blanco y no. correlacionado. Esta suposición, por otra parte, no se satisface generalmente para el modelo.
(40) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 30. ARX. Esto último implica que el MMC en este caso genera estimadores sesgados, donde el sesgo o desviación es una función no lineal del nivel de ruido presente en el sistema. Las expresiones obtenidas para los estimadores mínimos cuadráticos no resultan adecuadas para el propósito de la identificación en línea, dado que todos ellos requieren almacenar cantidades masivas de datos y realizar operaciones relativamente complejas con matrices cuyas dimensiones crecen con el tiempo. Un algoritmo recursivo orientado a ese objetivo será desarrollado en el epígrafe 2.4, no sin antes introducir en 2.3 la técnica del olvido exponencial.. 2.3. Técnica del Olvido Exponencial. Resulta conveniente introducir la técnica del olvido exponencial, de manera que los algoritmos de identificación en línea que serán derivados posteriormente sean más flexibles y robustos. El modelo ARX introducido en el epígrafe 2.1 resulta apropiado para el caso en que los parámetros de la planta contenidos en el vector P, son constantes. Aunque este modelo es adecuado para el tratamiento de muchas situaciones prácticas, ocurre con frecuencia que los parámetros de los procesos que son objeto de identificación varían como consecuencia de influencias aleatorias de muy diversa naturaleza. Si la ley estadística de las posibles variaciones de los parámetros fuera conocida a priori, una técnica tal como la de los filtros de Kalman pudiera aplicarse ventajosamente (Aguado et al., 1980) Sin embargo, muy raramente esta es la situación en la práctica. Con gran frecuencia, es posible solo asumir que las variaciones de los parámetros ocurren con suficiente lentitud. En tal caso, una técnica heurística conocida en la literatura como el "olvido exponencial", puede aplicarse sin introducir grandes complicaciones adicionales. La idea esencial de esta técnica es también muy simple y puede explicarse en la forma siguiente: Sea t el tiempo actual mientras τ denota el instante pasado en que los datos. y. fueron obtenidos. El estimador de los parámetros del modelo en el tiempo t se calcula a partir de un conjunto de ecuaciones del tipo: (2.40).
(41) CAPÍTULO 2. IDENTIFICACIÓN MEDIANTE EL MÉTODO DE MÍNIMOS CUADRADOS. 31. Para τ = 1, 2,..., t. Si los parámetros han variado en el tiempo, resulta evidente que las ecuaciones más "viejas" en este conjunto resultan menos confiables que las más recientes. Es posible tener este hecho en cuenta considerándose que la varianza del término estocástico. no es constante, sino que varía de forma tal que a las ecuaciones más viejas. del tipo (2.40) corresponde una varianza mayor que a las ecuaciones últimas, es decir, para τ próximo a t. Nótese que la consideración de una varianza mayor del ruido. se. interpreta como equivalente a que los parámetros del modelo sean menos exactos. Para modelar la varianza como una función del tiempo, resulta adecuado utilizar la expresión: {. (2.41). }. Donde es un factor escalar positivo, menor o igual a 1. La condición impuesta mediante (2.41) resulta equivalente a la siguiente: (2.42) tiene propiedades de ruido blanco y varianza constante: {. (2.43). }. La sustitución de (2.42) en (2.40) conduce a: [. (2.44). ]. Nótese que la diferencia entre (2.44) y (2.40) consiste en que los datos ahora pesados por el factor de olvido. y. son. . La introducción del factor de olvido. exponencial no altera la forma de la ecuación del estimador mínimo cuadrático de los parámetros dados en (2.32), salvo que ahora las matrices. y. se definen en la forma. modificada:. (2.45) [. ]. [. ]. El valor del coeficiente de olvido exponencial debe escogerse intuitivamente, de acuerdo con la velocidad del cambio de los parámetros. Una elección generalmente razonable se encuentra en el intervalo 0.9 a 1. Nótese que los valores próximos a 0.9 corresponden a un.
Figure




+7





Documento similar
El método de los mínimos cuadrados permite calcular los parámetros de forma y escala, mediante la transformación doble logarítmica de la función de distribución acumulativa
