Control de trayectoria en el espacio de tareas para simulador neumático de dos grados de libertad
61
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Control de Trayectoria en el Espacio de Tareas para Simulador Neumático de dos grados de libertad. Autor: Oriel Jorge Suárez E-Mail: [email protected]. Tutor: Ing. Orlando Urquijo Pascual Profesor Instructor. Dpto. de Automática y Sistemas Computacionales. Facultad de Ingeniería Eléctrica. E-mail: [email protected]. Santa Clara 2012 "Año 54 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. He sido un hombre afortunado; en la vida nada me ha sido fácil. Sigmund Freud.
(5) ii. DEDICATORIA. A mi familia, que me ha entregado su infinito amor y sus modestos recursos sin esperar nada a cambio. A los amigos con los que conviví en la universidad..
(6) iii. AGRACIMIENTOS. A mi tutor Orlando A los profesores que me impartieron clases a lo largo de estos 5 años; aprendí de cada uno. A mis compañeros de Automática. A cada cubano que trabaja y se sacrifica para sostener conquistas como la educación..
(7) iv. RESUMEN. Las ventajas que presentan los robots paralelos en el manejo de grandes pesos, su exactitud en el posicionamiento del efector final y la rigidez de su arquitectura, los hacen una alternativa a tener en cuenta con respecto a las estructuras robóticas en series. En la medida que ha venido aumentando la inclinación por el uso de los robots paralelos, lo ha hecho también el interés por el estudio de estrategias de control que faciliten su correcta explotación. En este trabajo se presenta una estrategia de control de trayectoria en el espacio de tareas para gobernar un robot paralelo de dos grados de libertad accionado por actuadores neumáticos, este es empleado en la simulación de conducción de vehículos para entrenamiento de personal. El control está validado experimentalmente mediante simulaciones, primeramente con el modelo lineal de los actuadores y luego con el robot..
(8) v. TABLA DE CONTENIDOS PENSAMIENTO .................................................................................................. i DEDICATORIA .................................................................................................. ii AGRACIMIENTOS ............................................................................................ iii RESUMEN ........................................................................................................ iv INTRODUCCIÓN ............................................................................................... 1 CAPÍTULO 1. Robótica Paralela ...................................................................... 5 1.1. Antecedentes de los robots paralelos ................................................... 5. 1.2. Actuadores neumáticos ...................................................................... 11. 1.2.1. Atributos de los sistemas neumáticos........................................... 11. 1.2.2. Desventajas de los sistemas neumáticos ..................................... 11. 1.3. Cinemática de Robots Paralelos ......................................................... 12. 1.3.1. Cinemática Inversa ....................................................................... 13. 1.3.2. Cinemática Directa ....................................................................... 14. 1.4. Dinámica de Robots Paralelos ............................................................ 15. 1.5. Control de Robots Paralelos ............................................................... 16. 1.5.1. Control en el Espacio Articular...................................................... 17. 1.5.2. Control en el Espacio de Tareas................................................... 18. 1.5.3. Control de trayectoria en robots paralelos .................................... 19. CAPÍTULO 2. Control de trayectoria aplicado a una. plataforma de. 2GDL. ............................................................................................................... 23 2.1. Descripción de la plataforma de dos grados de libertad...................... 23. 2.1.1 2.2. Definición de las notaciones de la plataforma .............................. 25. Obtención del modelo cinemático de la plataforma ............................. 26. 2.2.1. Obtención del modelo cinemático mediante la formulación. vectorial…………………………………………………………………………..29 2.3. Modelo dinámico de los actuadores .................................................... 32. 2.4. Control de la plataforma de 2 GDL ..................................................... 33. 2.4.1. Control de posición en el espacio de tareas ................................. 34. 2.4.2. Control de trayectoria en el espacio de tareas ............................. 37. CAPÍTULO 3. ................................................................................................... 40.
(9) vi. 3.1. Herramientas de software y hardware................................................. 40. 3.2. Simulaciones con el modelo lineal de los actuadores ......................... 41. 3.2.1. Simulación del control de posición................................................ 41. 3.2.2. Simulación del control de trayectoria ............................................ 42. 3.3. Experimentos con el robot................................................................... 43. 3.3.1. Implementación del control de posición en el robot ...................... 43. 3.3.2. Implementación del control de trayectoria en el robot .................. 44. 3.4. Análisis económico.............................................................................. 45. CONCLUSIONES Y RECOMENDACIONES ................................................... 46 Conclusiones ................................................................................................ 46 Recomendaciones ........................................................................................ 47 REFERENCIAS BIBLIOGRÁFICAS ................................................................ 48 ANEXOS .......................................................................................................... 50 Anexo I: Datos del Cilindro FESTO DNCB-100-320-PPV-A ......................... 50 Anexo II: Características principales de la tarjeta MF 624. ........................... 51 Anexo III: Cálculo de la matriz Jacobiana del Robot. .................................... 51.
(10) INTRODUCCIÓN. 1. INTRODUCCIÓN. De forma general, la Robótica se define como: El conjunto de conocimientos teóricos y prácticos que permiten concebir, realizar y automatizar sistemas basados en estructuras mecánicas poliarticuladas, dotadas de un determinado grado de "inteligencia" y destinados a la producción industrial o a la sustitución del hombre en muy diversas tareas (Barrientos, Peñin et al. 2007). Teniendo en cuenta su estructura cinemática, los robots se pueden encontrar en tres grupos: robots series, paralelos e híbridos (Velazco 2007; García 2008; López 2008; Entenza 2009). Un robot serie es una secuencia de acoplamientos que comienza en una base y termina en un efector final (Siciliano and Khatib 2008), mientras que un robot paralelo posee una estructura mecánica formada por un mecanismo de cadena cinemática cerrada, en el que el efector final se une a la base por al menos dos cadenas cinemáticas independientes (Merlet 2006). La combinación de ambos tipos de cadena cinemática forma una estructura híbrida. Es sabido que las estructuras series son mucho más usadas que las paralelas (Aracil, Saltarén et al. 2006), sin embargo, en muchas aplicaciones resulta conveniente el uso de robots paralelos. Con el. fin de evaluar esta situación se ofrecen a. continuación una serie de ventajas y desventajas de los robots paralelos frente a los seriales, que servirán para comparar sus prestaciones (Aracil, Saltarén et al. 2006; Merlet 2006). En general, las plataformas paralelas presentan las siguientes ventajas: . Tienen capacidad para manejar grandes cargas ya que los accionamientos de potencia conectan directamente la base del robot al efector. final. funcionando así como elementos estructurales. Esto les permite manipular pesos muy superiores al suyo, proporcionándoles una alta eficiencia energética..
(11) INTRODUCCIÓN . 2. En términos de precisión son claramente superiores a los robots series, pues presentan pequeños errores de posicionamiento debido a que esta topología ofrece una alta rigidez y muy bajo peso.. . Las velocidades de operación son superiores a cualquier otra estructura robótica.. Sin embargo, también presentan otras características que pueden considerarse desventajas en dependencia de la aplicación en que se usen (Aracil, Saltarén et al. 2006): . La cinemática de los mecanismos paralelos es más complicada. En ocasiones esto obliga a recurrir a sensores redundantes para poder establecer un lazo de control.. . El espacio de trabajo suele ser pequeño comparativamente hablando. Además, no es sencillo su cálculo, pues la posición y orientación están muy fuertemente acopladas.. . El problema de las configuraciones singulares es más complejo y debe resolverse específicamente para cada topología.. . No existe, como ocurre en los robots serie, un modelo dinámico general para los mismos. Esto dificulta el desarrollo de algoritmos de control de carácter general y hace que los robots existentes en la actualidad se controlen de forma desacoplada.. Todo esto puede conducirnos a concebir para los robots el uso de estructuras paralelas que complementen las aplicaciones de los tradicionales robots series. En este caso una estructura paralela resulta ideal para aplicaciones como los simuladores de conducción y vuelo, que requieren mover elevadas cargas con relativa precisión y no requieren un área de trabajo muy grande. Estos simuladores tienen muchas aplicaciones a nivel mundial como pueden ser en sistemas de simulación de movimiento para la industria del entretenimiento o para el entrenamiento de conductores y pilotos (García 2008; López 2008; Entenza 2009)..
(12) INTRODUCCIÓN. 3. En nuestro país el Centro de Investigación y Desarrollo de Simuladores (SIMPRO), se encarga de desarrollar estas estructuras para satisfacer las necesidades en las ramas de la producción y los servicios o en juegos virtuales que pueden ser usados en el sector del turismo. En la Universidad Central de las Villas (UCLV), el Grupo de Automatización, Robótica y Percepción (GARP) del Departamento de Automática. y Sistemas. Computacionales ha venido trabajando en colaboración con SIMPRO, y una de sus tareas consiste en diseñar e implementar el sistema de control para una plataforma electro-neumática. A pesar de contar con una estrategia de control articular probada y validada experimentalmente, no se puede garantizar que las variables cartesianas del simulador de dos grados de libertad sean las deseadas, y además, que siga una trayectoria deseada. Por lo que el objetivo general de esta investigación es: . Implementar control de trayectoria en el espacio de tareas para una plataforma de dos grados de libertad.. Con vista al cumplimiento de esta tarea los objetivos específicos de este trabajo son: . Analizar las tendencias mundiales y estrategias más utilizadas para el control de trayectoria en el espacio de tareas para robótica paralela.. . Proponer una estrategia de control de trayectoria en el espacio de tareas y sintonizar los controladores.. . Evaluar el desempeño de la estrategia de control mediante simulaciones.. . Evaluar el desempeño de las estrategias de control mediante experimentos con el robot.. Organización del informe Este trabajo de diploma se ha estructurado en tres capítulos. En el capítulo 1 se realiza un análisis de la evolución de las estructuras paralelas y sus diferentes pioneros a lo largo de la historia, se exponen las principales ventajas y desventajas de los actuadores neumáticos, luego se abordan aspectos teóricos relacionados con la.
(13) INTRODUCCIÓN. 4. cinemática y la dinámica de los robots paralelos y, por último, se dedica un epígrafe al tema del control de estos mecanismos, donde se exponen algunas estrategias de control de trayectoria. El capítulo 2 comienza con la descripción de la plataforma de conducción de sello SIMPRO y se definen sus notaciones, se describe la obtención de un modelo cinemático para la misma y se presenta un modelo para los actuadores y, por último, se describe el control y ajuste de los controladores. El capítulo 3 está destinado principalmente a ilustrar los resultados del control de la plataforma mediante simulaciones con el modelo de los actuadores y experimentos con el robot. El informe presenta 3 anexos y abundante bibliografía sobre el tema..
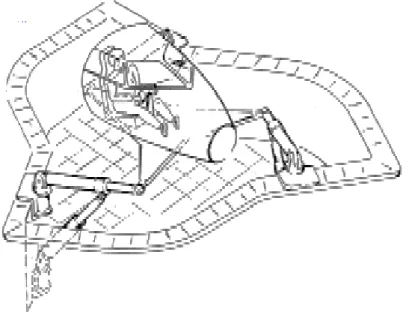
(14) CAPÍTULO 1. 5. CAPÍTULO 1. Robótica Paralela. Hace siglos los geómetras franceses e ingleses se interesaron por el estudio de los poliedros y sus aplicaciones, así aparecieron los primeros trabajos teóricos relacionados con las estructuras mecánicas paralelas (Aracil, Saltarén et al. 2006). Hoy día los robots paralelos se utilizan en gran cantidad aplicaciones, en las que se ha venido incrementando su uso por las diversas ventajas que brindan respecto a precisión, repetitividad y elevada fuerza. Para su correcta explotación se hace necesario desarrollar una estrategia de control satisfactoria, que dependerá en gran medida de la obtención de un buen modelo dinámico y cinemático.. 1.1. Antecedentes de los robots paralelos. En el año 1931 James E. Gwinnett patentó el primer mecanismo paralelo del que se tenga conocimiento. Se trataba de una plataforma de movimiento destinada a la industria del entretenimiento (figura 1.1). Al parecer este ingenioso proyecto nunca llegó a construirse (Bonev 2003).. Figura 1.1: Mecanismo espacial paralelo diseñado por James E. Gwinnett..
(15) CAPÍTULO 1. 6. Una década más tarde, y sólo 17 años después de que surgiera el término “robot” introducido por Karel Kapek, Willard L.V. Pollard inventó el que se conoce comúnmente como el primer robot industrial y fue precisamente un robot paralelo destinado a pintura con spray. Este ingenioso invento representa un robot paralelo de 5 Grados de Libertad (GDL) y tres brazos con motores rotativos montados sobre un pivote (figura 1.2). Así, los tres motores determinan la posición de la cabeza de la herramienta, mientras su orientación se controla por otros dos motores fijos en la base que transmiten el movimiento para la herramienta principal mediante cables rotativos flexibles. Desafortunadamente nunca se construyó (Bonev 2003; Aracil, Saltarén et al. 2006).. Figura 1.2: El primer robot paralelo industrial, patentado por W. L.V. Pollard. En 1947 V.E. Gough ideó un robot paralelo con seis actuadores lineales formando una estructura de octaedro (figura 1.3). Este robot con 6 GDL fue utilizado en la empresa Dunlop para el ensayo de neumáticos de aviación. La estructura fue presentada en un congreso de La Federación Internacional de Sociedades de Ingenieros y Técnicos del Automóvil (FISITA) en 1962 y es la que ha tenido mayor éxito. En la actualidad, existen multitud de plataformas basadas en este diseño en numerosas empresas. Injustamente, muchos autores le denominan plataforma de Stewart cuando se le debería conocer como plataforma de Gough (Bonev 2003; Zabalza and Ros 2007)..
(16) CAPÍTULO 1. (a). 7. (b). Figura 1.3: Plataforma de Gough. (a) Primer modelo (b) Prototipo actual. V.E. Gough en la presentación de su invento, citaba la existencia de unas mesas llamadas MAST (Multi-Axis Simulation Table) anteriores a su invento. En la actualidad estas mesas están accionadas por seis actuadores lineales, tres verticales y tres horizontales (figura 1.4).. Figura 1.4: MAST (Multi-Axis Simulation Table). En 1965 D. Stewart presentó en un artículo una plataforma con 6 GDL para ser utilizada como simulador de vuelo (figura 1.5). El artículo de Stewart tuvo y tiene una gran influencia en el mundo académico y se considera como uno de los primeros trabajos de análisis de plataformas paralelas (Bonev 2003; Zabalza and Ros 2007)..
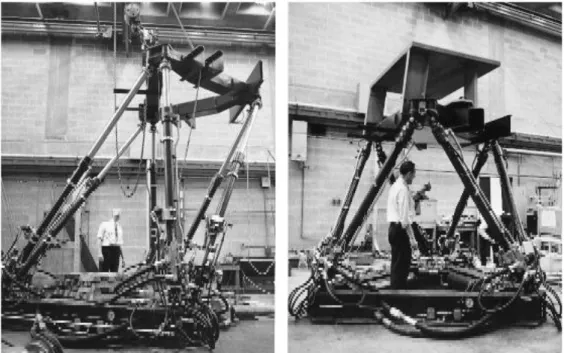
(17) CAPÍTULO 1. 8. Figura 1.5: Plataforma de D. Stewart. Paralelamente, el ingeniero Klaus Cappel realizaba en el Franklin Institute Research Laboratory numerosas investigaciones con plataformas paralelas de 6 GDL. En 1967 Cappel patentaba un simulador de movimiento basado en un hexápodo (figura 1.6), este fue construido al igual que varios de sus experimentos (figura 1.7) (Bonev 2003).. Figura 1.6: Klaus Cappel ilustrando su hexápodo a los gerentes del Franklin Institute..
(18) CAPÍTULO 1. 9. Figura 1.7: Simulador de movimiento de Klaus Cappel.. Más tarde, en 1978, K.H. Hunt sugirió que se usaran los mecanismos actuados de forma paralela en los simuladores de vuelo como robots manipuladores, y destacó que los manipuladores paralelos requerían de un estudio más detallado en el contexto de las aplicaciones robóticas a la vista de las ventajas en cuanto a rigidez y precisión respecto a los robots serie convencionales (Aracil, Saltarén et al. 2006). En 1983 presentó un manipulador paralelo con 6 GDL accionado por actuadores giratorios (figura 1.8).. Figura 1.8: Manipulador paralelo propuesto por K.H. Hunt..
(19) CAPÍTULO 1. 10. En la actualidad los robots paralelos están siendo cada vez más usados, principalmente gracias a un mejor conocimiento de su funcionamiento y sus prestaciones, y posibilitado por un aumento de la capacidad de cómputo de los nuevos procesadores para resolver procesos numéricos iterativos. Entre las principales aplicaciones de los robots paralelos en la actualidad figuran las aplicaciones espaciales, los simuladores de vuelos y de conducción de vehículos, la colocación u orientación de elementos mecánicos como son la orientación de grandes antenas, aplicaciones industriales como máquinas herramienta y centros de ensamblaje, aplicaciones médicas y otras donde se requiera el empleo de dispositivos de alta precisión, velocidad elevada y alta capacidad de carga (Merlet 2006; Velazco 2007).. Figura 1.9: Robots paralelos en aplicaciones médicas..
(20) CAPÍTULO 1 1.2. 11. Actuadores neumáticos. El actuador neumático representa el principal operador de control de la fuerza en muchas aplicaciones industriales, donde sus características estáticas y dinámicas juegan un papel importante en el comportamiento global del sistema de control. Por lo tanto, conocer sus atributos y desventajas es de vital importancia para el diseño de una estrategia de control (Ali, Noor et al. 2009).. 1.2.1 Atributos de los sistemas neumáticos Los sistemas neumáticos tienen muchos atributos que los hacen muy prácticos en ambientes difíciles. Estas son algunas de sus principales ventajas (Ali, Noor et al. 2009; Rubio 2009): . No están sujetos a las limitantes de temperatura de los fluidos hidráulicos.. . Los gases de escape no necesitan ser recogidos.. . Las líneas de retorno para líquido son innecesarias y el almacenamiento a largo plazo no es un problema porque los actuadores neumáticos son virtualmente secos y no necesitan de materiales orgánicos.. . Los actuadores neumáticos tienen un menor peso específico.. . Son de fácil uso y mantenimiento.. . Presentan una tecnología simple y de bajo costo.. . Son limpios, seguros y fáciles de instalar.. 1.2.2 Desventajas de los sistemas neumáticos Los. actuadores. neumáticos. presentan. características. que. dificultan. considerablemente el control de su posición en aplicaciones donde se requiera el posicionamiento de la carga en cualquier parte de la carrera posible del cilindro. Algunas característica que hacen que la dinámica de los actuadores neumáticos sea altamente no lineal son (Rubio 2009):.
(21) CAPÍTULO 1. 12. . La compresibilidad del aire.. . El comportamiento no lineal del flujo de aire a través de las válvulas.. . La existencia de elevadas fuerzas de fricción estáticas y dinámicas entre el cilindro y el pistón.. Otras dificultades en el control servo-neumático están dadas por la presencia de posibles disturbios provenientes de fugas en las válvulas. Además, la incertidumbre en los parámetros del sistema hace que el diseño de los controladores sea problemático (Song, Liu et al. 2006).. 1.3. Cinemática de Robots Paralelos. La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Realiza una descripción analítica del movimiento espacial del robot como una función del tiempo, y estudia las relaciones entre la posición y la orientación del extremo final del robot con los valores que toman sus coordenadas articulares (Barrientos, Peñin et al. 2007). Existen dos problemas a resolver por la cinemática del robot (Barrientos, Peñin et al. 2007), el primero se conoce como el problema cinemático directo que consiste en determinar cuál es la posición y orientación del extremo final del robot con respecto a un sistema de coordenadas que se toma como referencia conociendo los valores de las articulaciones y los parámetros geométricos de los elementos del robot. El segundo se denomina problema cinemático inverso que resuelve la configuración que debe adoptar el robot para una posición y orientación del extremo conocida (figura 1.10).. Figura 1.10: Relación entre Cinemática Directa e Inversa..
(22) CAPÍTULO 1. 13. 1.3.1 Cinemática Inversa La Cinemática Inversa consiste en establecer el valor de las coordenadas articulares correspondientes a la pose del efector final o extremo del robot (Merlet 2006). Establecer la Cinemática Inversa es esencial para el control de posición de un robot paralelo. Existen múltiples formas de representar la pose de un cuerpo rígido a través de. un conjunto de parámetros. La forma más común es usando las. coordenadas en un marco de referencia de un punto C dado, y tres ángulos para representar su orientación (Merlet 2006).. Método Analítico: véase cómo funciona el método analítico según Jean Pierre Merlet (Merlet 2006): Si se consideran cada una de las cadenas conectadas a la base para la plataforma móvil, entonces A representa el fin de la cadena que está conectada a la base, y B el fin de la cadena que está conectada a la plataforma móvil. Por construcción las coordenadas de A son conocidas en un marco fijo de referencia, mientras que las coordenadas de B pueden ser determinadas por la posición y orientación de la plataforma móvil. Por lo tanto, el vector AB juega un papel crucial en la solución del problema cinemático inverso. Si la X representa las coordenadas generalizadas de la plataforma móvil se tiene:. AB AO OB H1 ( X ). (1.1). De esta forma H1 ( X ) proporciona la posición de los puntos extremos de todas las cadenas para las cuales se quieren calcular las coordenadas articulares. Las coordenadas articulares de la cadena Ѳ permiten calcular el vector AB, con la ayuda de X en caso que sea necesario.. AB H 2 ( X , ). (1.2). El cálculo de las coordenadas articulares puede ser hecho resolviendo el siguiente sistema de ecuaciones:.
(23) CAPÍTULO 1. H1 ( X ) H 2 ( X , ). 14. (1.3). Nótese que resolviendo la ecuación (1.3) se está en condiciones de determinar no sólo las coordenadas articulares sino también las coordenadas de las articulaciones pasivas.. Método Geométrico: este procedimiento es adecuado para robots de pocos grados de libertad o para el caso de que se consideren sólo los primeros grados de libertad, dedicados a posicionar el efector final (Barrientos, Peñin et al. 2007). El método en sí se basa en encontrar suficiente número de relaciones geométricas en las que intervendrán las coordenadas del extremo del robot, sus coordenadas articulares y las dimensiones físicas de sus extremos (Barrientos, Peñin et al. 2007). Esto permite un acercamiento más geométrico al problema cinemático inverso pues considera que las extremidades A y B (donde nuevamente A representa el fin de la cadena que está conectada a la base, y B el fin de la cadena que está conectada a la plataforma móvil) de cada pierna tienen una posición más conocida en el espacio tridimensional (Merlet 2006).. 1.3.2 Cinemática Directa La resolución del problema cinemático directo consiste en encontrar las relaciones que permiten conocer la localización espacial del extremo del robot a partir de los valores de sus coordenadas articulares (Barrientos, Peñin et al. 2007). El análisis de la cinemática directa constituye uno de los problemas más complejos a resolver en la obtención del modelo en robots paralelos. Su objetivo es más bien para la simulación ya que la solución de la problemática de la cinemática inversa es uno de los elementos básicos para el control de cualquier robot (Velazco 2007). Aunque existen muchas y diferentes arquitecturas mecánicas de robots paralelos, el problema cinemático directo para la mayoría de estas se puede reducir en solucionar la cinemática directa sólo para algunas arquitecturas dominantes. Por ejemplo, la solución de la cinemática directa de la plataforma de Gough permite solucionar la del.
(24) CAPÍTULO 1. 15. Hexápodo aunque las arquitecturas mecánicas de estos robots son absolutamente diferentes (Velazco 2007). El verdadero problema sin solucionar de la cinemática directa radica en complementar los algoritmos actuales para encontrar un algoritmo que rechace las soluciones que no pueden ser alcanzadas (singularidades) del conjunto total de soluciones (Velazco 2007). La cinemática directa puede abordarse desde dos vertientes: la Mínima, que implica un mínimo número de sensores, igual al número de actuadores articulados, y la Redundante, donde el número de sensores es mayor que el número de actuadores (Merlet 2006).. 1.4. Dinámica de Robots Paralelos. La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento que en él origina. Por lo tanto, el modelo dinámico de un robot tiene por objetivo conocer la relación entre el movimiento del robot y las fuerzas implicadas en el mismo (Barrientos, Peñin et al. 2007). Esta. relación. se. obtiene. mediante. el. modelo. dinámico,. que. relaciona. matemáticamente: 1. La localización del robot definida por sus variables articulares o por las coordenadas de localización de su extremo y sus derivadas: velocidad y aceleración. 2. Las fuerzas y pares aplicadas en las articulaciones (o en el extremo del robot). 3. Los parámetros dimensionales del robot, como longitud, masas e inercias de sus elementos. A medida que aumentan los grados de libertad de estas estructuras mecánicas aumentará el nivel de complejidad de los procedimientos que se realizan para obtener el modelo matemático que describe la dinámica del sistema, por lo que siempre no será posible obtener un modelo dinámico expresado de una forma cerrada. No es tan.
(25) CAPÍTULO 1. 16. complicado para robots de uno o dos grados de libertad, pero a medida que aumenten crecerá la complejidad del análisis dinámico debido a la existencia de múltiples cadenas de lazo cerrado. Puede obtenerse el modelo matemático al integrar un conjunto de ecuaciones diferenciales, lo cual permite conocer el movimiento que surge al aplicar una fuerza, o las fuerzas que se deben aplicar para obtener un movimiento deseado (Barrientos, Peñin et al. 2007). La dinámica juega un papel importante en el control de los robots paralelos teniendo influencia en la rapidez de movilidad del efector final en robots que manejen grandes pesos, en el ancho de banda de la respuesta del robot en el caso de aplicaciones de vibraciones asegurando la rigidez de las articulaciones. De manera análoga a la cinemática se define la dinámica inversa y la dinámica directa (Velazco 2007). La dinámica inversa relaciona la trayectoria a seguir por el efector final, la velocidad y la aceleración, permitiendo determinar la fuerza de las articulaciones actuadas. Por su parte, la dinámica directa permite, conociendo las fuerzas o torques de las articulaciones actuadas, determinar la trayectoria a seguir por el efector final, su velocidad y su aceleración.. 1.5. Control de Robots Paralelos. El interés por el estudio y aplicación en la práctica de los robots de estructura paralela ha venido creciendo en los últimos años, por lo que también han aumentado los estudios relacionados con los esquemas de control más apropiados para gobernar dichos sistemas (Izaguirre, Hernández et al. 2011). Las estrategias de control para robots paralelos se pueden dividir en dos grupos: control en el espacio de articular y control en el espacio cartesiano o espacio de tareas (Paccot, Andreff et al. 2009)..
(26) CAPÍTULO 1. 17. 1.5.1 Control en el Espacio Articular El control en el espacio articular tiene como objetivo diseñar un control por retroalimentación tal que las coordenadas articulares q(t ) R n sigan el movimiento deseado q d (t ) tan fielmente como sea posible (Siciliano and Khatib 2008). En este sentido el control del manipulador del robot se realizará siempre en un marco referencial articular. Sin embargo, el usuario normalmente especifica el movimiento en términos de las coordenadas del elemento terminal por lo que se aplicará la estrategia mostrada en la figura 1.11 (Siciliano and Khatib 2008).. Figura 1.11: Concepto genérico de control en el espacio articular.. En este sentido, Ayssam Elkady (Elkady, Elkobrosy et al. 2008) presenta tres variantes de control PD como una alternativa viable para un manipulador paralelo de tres grados de libertad. Las variantes son el control PD con referencia de posición y velocidad (1.4), el control PD con compensación de gravedad (1.5) y el control PD con parámetros de retroalimentación dinámica (1.6).. F K p e K D e. F K p e K D e K (qd ) F M (qd )qd G(qd , q d )qd K (qd ) K p e K D e. (1.4) (1.5) (1.6). Elkady también presenta el control por par calculado (1.7). El control por par calculado es una estrategia que proviene de manipuladores seriales. El control está basado en la formulación de Lagrange del modelo dinámico inverso de una máquina (Paccot, Andreff et al. 2009)..
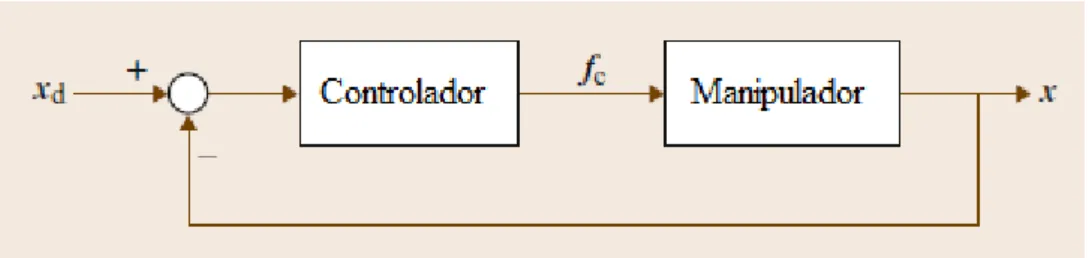
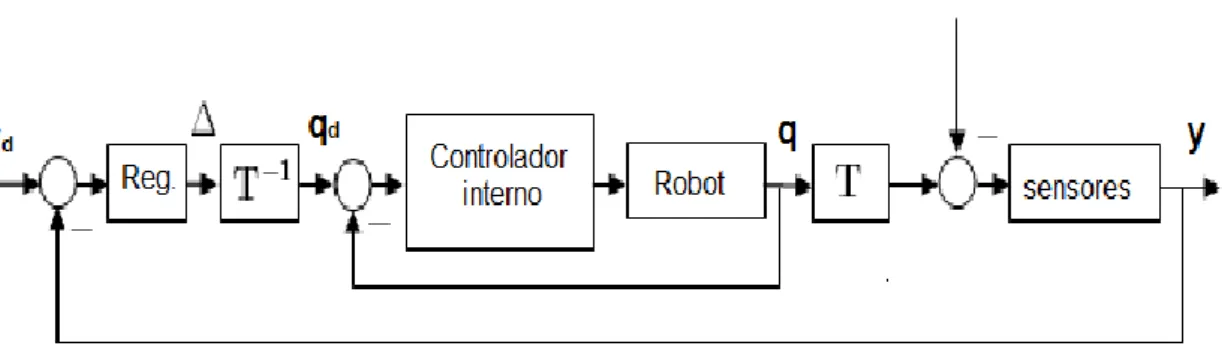
(27) CAPÍTULO 1. 18. En este control el ajuste de ganancia está fijado por un amortiguamiento y una frecuencia de corte. El amortiguamiento ξ se encuentra generalmente entre 0.9 y 1 con el fin de evitar las sobrecrestas y lograr un buen tiempo de establecimiento. La frecuencia de corte está fijada al valor más distante con respecto a la frecuencia mecánica de resonancia del sistema (Paccot, Andreff et al. 2009).. F M (q)[qd K D e K p e] G(q, q )q K (q). (1.7). 1.5.2 Control en el Espacio de Tareas El principal objetivo del control en el espacio de tareas es diseñar un controlador por retroalimentación que permita que la ejecución del movimiento del elemento terminal x(t ) R n siga al movimiento deseado del elemento terminal x d (t ) tan fielmente como sea posible (Siciliano and Khatib 2008). La figura 1.12 muestra un diagrama esquemático de este método de control.. Figura 1.12: Concepto básico de control en el espacio de tareas.. El Control en el Espacio de Tareas, también conocido como control en el Espacio Cartesiano, es particularmente importante en las máquinas de cinemática paralela. Teóricamente, debido a que este control se realiza tomando como referencia el efector final y la posición del elemento terminal es el estado de estas máquinas (Paccot, Andreff et al. 2009). En la Universidad Central de las Villas (UCLV) el Grupo de Automatización, Robótica y Percepción (GARP) presenta un control con dos lazos en cascada para una plataforma de tres grados de libertad (Hernández, Urquijo et al. 2010), donde el lazo interno posibilita el control del robot en el espacio articular, mientras que en el lazo externo se implementa el control en el espacio de tareas (figura 1.13)..
(28) CAPÍTULO 1. 19. El controlador interno presenta una arquitectura abierta donde puede ser implementado cualquier tipo de controlador mientras que en el lazo externo se lleva a cabo el control de posición.. Figura 1.13: Esquema de control en cascada para plataforma de tres 3 GDL.. 1.5.3 Control de trayectoria en robots paralelos El control de seguimiento de trayectoria, ya sea en el espacio articular o cartesiano, consiste en seguir una trayectoria variable en el tiempo dada q d (t ) o x d (t ). y sus. d (t ) o xd (t ) , las cuales describen la velocidad y sucesivas derivadas q d (t ) o x d (t ) y q aceleración deseadas respectivamente (Siciliano and Khatib 2008). Resulta conveniente controlar la trayectoria de un robot en el espacio de tareas puesto que asegura un estado de control feedback que conduce a una mejor precisión con respecto al control en el espacio articular (Paccot, Andreff et al. 2009). El francés Flavien Paccot (Paccot, Andreff et al. 2009) expone tres variantes diferentes de control PID simple en el espacio de tareas asumiendo que siempre estará disponible la información de la pose del elemento terminal: con la dinámica del efector final solamente (figura 1.14), con la dinámica de la articulación solamente (figura 1.15) y con la dinámica del elemento terminal y la articulación (figura 1.16)..
(29) CAPÍTULO 1. 20. Figura 1.14: Control PID en el espacio de tareas con la dinámica del efector final.. Figura 1.15: Control PID en el espacio de tareas con la dinámica de la articulación.. Figura 1.16: Control PID en el espacio de tareas con la dinámica del efector final y la articulación.. Flavien Paccot también hace un análisis del control por par calculado en el Espacio de Tareas (figura 1.17). En este control se podrían esperar buenos resultados si se.
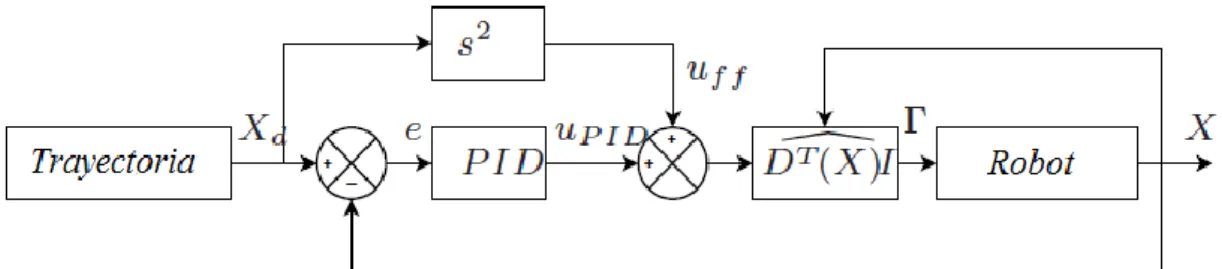
(30) CAPÍTULO 1. 21. contara con un buen modelo dinámico y una buena identificación dinámica, además de un buen algoritmo para las transformaciones numéricas restantes (Paccot, Andreff et al. 2009).. Figura 1.17: Control por par calculado en el espacio de tareas.. Jean Jacques Slotine (Slotine and Li 1989) en su libro “Applied Nonlinear Control” presenta una estrategia de control (figura 1.18) donde la parte feedforward es usada para cancelar el efecto de las perturbaciones conocidas proveyendo una acción anticipativa por lo que resulta de gran ayuda para controlar sistemas no lineales. Nótese que para realizar una compensación feedforward siempre se requiere el modelo de la planta, aunque en muchos casos no necesita ser un modelo tan exacto. Luego el término feedforward se calcula invirtiendo el modelo de la planta y será responsable de reducir y eliminar el error de seguimiento. El problema de implementar este control radica en el hecho de que en la mayoría de los casos el modelo inverso de la planta será un sistema con más ceros que polos, o sea, un sistema irrealizable físicamente puesto que implicaría conocer el futuro.. Figura 1.18: Estrategia de control planteada por Slotine..
(31) CAPÍTULO 1. 22. Conclusiones del capítulo . Contar con un buen modelo dinámico y cinemático del sistema resulta de vital importancia para evaluar el desempeño de una estrategia de control, sin embargo, modelar la dinámica de actuadores neumáticos puede resultar altamente complicado debido a que estos sistemas son altamente no lineales.. . El control en el espacio de tareas, o espacio cartesiano, resulta especialmente efectivo en mecanismos paralelos, y más aún si lo que se desea controlar es la trayectoria del robot, puesto que garantiza un estado de retroalimentación que proporciona una mayor precisión con respecto al control en el espacio articular..
(32) CAPÍTULO 2. 23. CAPÍTULO 2. Control de trayectoria aplicado a una plataforma de 2GDL. En este capítulo se pretende diseñar un control que permita contralar la trayectoria para los movimientos de ladeo y cabeceo de la plataforma de conducción desarrollada por SIMPRO. En función de este objetivo primeramente se hace necesario describir los detalles técnicos y el funcionamiento del simulador, se expone la solución del problema cinemático y es presentado el modelo lineal del sistema electro-neumático. Por último se propone una estrategia de control y se sintonizan los controladores.. 2.1. Descripción de la plataforma de dos grados de libertad. El simulador de conducción de sello SIMPRO (figura 2.1) está compuesto por una cabina de conducción con un monitor que brinda información visual del entorno virtual con el que interacciona el conductor. Este simulador puede simular diferentes tipos de vehículos ligeros o pesados.. Figura 2.1: Plataforma de conducción de sello SIMPRO. La plataforma es un robot paralelo de dos grados de libertad, ladeo y cabeceo, la cabina pivotea sobre una columna central mediante una articulación pasiva en cuyo extremo superior se encuentra una unión universal. Los movimientos de la plataforma.
(33) CAPÍTULO 2. 24. móvil se logran mediante la acción de los dos cilindros electro-neumáticos lineales (actuadores). que. constituyen. articulaciones. actuadas. prismáticas,. cuyos. desplazamientos le imprimen al elemento terminal rotaciones sobre dos ejes perpendiculares entre sí (ejes x y y para nuestro caso). Estas rotaciones simulan las pendientes del mundo virtual y son visualizadas en el monitor ubicado en la propia cabina. En ambos extremos de las articulaciones prismáticas se encuentran uniones universales que le brindan la movilidad necesaria para lograr las orientaciones de la plataforma móvil superior (Figura 2.2).. Figura 2.2: Arquitectura de la Plataforma de conducción de SIMPRO.. Tabla 2.1: Datos mecánicos del simulador de conducción.. Parámetros. Valor. Masa total de la cabina (Kg). 250. Posición de centro de masa (x,y,z) en mm. [0, 0, 700]. Ángulo de cabeceo máximo. de -13° a 19°. Ángulo de ladeo máximo. De 13° a -19°. Distancia del origen a cada cilindros (mm). 560. Elongación máxima de los cilindros (mm). 320.
(34) CAPÍTULO 2. 25. 2.1.1 Definición de las notaciones de la plataforma Para el caso particular de la plataforma objeto de estudio, la base fija está compuesta por el triángulo formado por los puntos A1OA2, dependiendo solamente de las longitudes a1 y a2 (figura 2.3). La plataforma móvil está conformada por el plano que forman los puntos B1PB2, siendo única su geometría, y solamente dependiente y definida por la longitud de sus bordes b1 y b2. La definición de los orígenes de coordenadas en los sistemas de referencia fijo y móvil se realiza de acuerdo la bibliografía consultada (Merlet 2006). En tal sentido se considera ubicar el sistema de referencia móvil coincidente con el centro del triángulo que conforma la plataforma superior (elemento terminal), esta es la responsable de soportar la cabina de conducción. El sistema de referencia fijo se coloca en el centro de la base fija ubicada en la parte inferior de la base metálica que soporta toda la estructura de la plataforma, la cual va anclada al suelo.. Figura 2.3: Definición de los sistemas de referencia y de las longitudes de los brazos en la plataforma SIMPRO.. La orientación en el espacio de la plataforma móvil estará determinada por los ángulos de rotación α y β (Figura 2.4). El ángulo α es el ángulo de rotación alrededor del eje x’ del sistema x’y’z’ de coordenadas móviles, el cual brinda la sensación de cabeceo, mientras que β es el de rotación alrededor del eje y’, brindando la sensación de ladeo..
(35) CAPÍTULO 2 2.2. 26. Obtención del modelo cinemático de la plataforma. En la plataforma de conducción de SIMPRO la solución del problema cinemático tanto directo como inverso resulta menos complicado que en otros robots paralelos, debido principalmente al hecho de que no existe acoplamiento de una articulación sobre la otra. Para resolver el problema cinemático se fijaron las notaciones de la plataforma de manera similar al trabajo de diploma presentado por León (Guerra 2011). En el caso de la cinemática directa la variable conocida en cada caso será la longitud del brazo articulado, y las incógnitas son el ángulo α (rotación en el eje x’) y el ángulo β (rotación en el eje y’) que definen la orientación del efector final (Figura 2.4).. Figura 2.4: Representación de las rotaciones de alabeo y cabeceo en la plataforma.. Para obtener la cinemática inversa se cuenta con los valores de los ángulos α y β (especificados por el usuario) que representan las rotaciones en los ejes x’ y y’ respectivamente, y la incógnita es el valor de la longitud del brazo actuado. Si se analiza la rotación en uno de los ejes (eje x’ en este caso) como se muestra en la figura 2.5, el segmento PB2 describe una circunferencia de centro P..
(36) CAPÍTULO 2. 27. Figura 2.5: Geometría de las rotaciones de la plataforma móvil. Si se analiza detenidamente la figura 2.5, puede verse que mediante soluciones trigonométricas pueden existir varias formas de resolver el problema cinemático para una articulación. En el triángulo definido por los vértices A2PB2’ se puede ver siempre que el lado PB2’= PB2, pues este es el brazo de la plataforma que no varía y aplicando la ley de los cosenos referida al ángulo φ se obtiene lo siguiente:. 2. 2. 2. A2 B2 PA2 PB2 2 cos PA2 PB2 '. '. '. (2.1). La ecuación (2.1) representa la expresión de la cinemática inversa ya que permite conocer la longitud de la articulación A2B2’ en función de la orientación del elemento terminal, en este caso, el ángulo de ladeo o cabeceo. Del lado derecho de la igualdad todos los términos pueden ser conocidos con relativa facilidad como se muestra:. PB2 b2 '. 2. PA2 OP OA2. (2.2). 2. (2.3).
(37) CAPÍTULO 2. 28. El ángulo φ puede ser obtenido en la ecuación (2.4):. 0 . Donde. 0. (2.4). es el ángulo inicial comprendido entre PA2 y PB2, y se puede calcular. mediante la siguiente ecuación:. OP OA2. 0 tan 1 . . (2.5). Para obtener la cinemática directa, se puede despejar de la ecuación (2.1) el término φ de la siguiente forma:. PA 2 PB '2 A B '2 2 2 2 2 cos 2 PA2 PB2 ' 1. . (2.6). Luego α puede ser obtenida mediante la ecuación (2.7):. 0. (2.7). El análisis correspondiente al movimiento de ladeo se realiza de la misma forma, sólo que el ángulo α se cambia por β, φ por ϴ y el punto B2’ se sustituye por B1’ como se muestra en las siguientes ecuaciones:. 2. 2. 2. A1B1 ' PA1 PB1 ' 2 cos PA1 PB1 '. (2.8). PB1 ' b1. (2.9).
(38) CAPÍTULO 2 2. 2. PA1 OP OA1. 29 2. 0 . (2.10). (2.11). Donde:. 0 : Ángulo inicial formado por. PA1 y PB1 .. OP OA 1. 0 tan 1 . PA 2 PB '2 A B '2 1 1 1 cos 1 2 PA1 PB1 ' . (2.12). 1. (2.13). 2.2.1 Obtención del modelo cinemático mediante la formulación vectorial. El modelo cinemático de la plataforma puede ser obtenido también mediante la formulación vectorial similar al trabajo de diploma de León (Guerra 2011), método analítico muy intuitivo que permite desarrollar un sistema de ecuaciones cinemáticas con igual cantidad de ecuaciones que de incógnitas mediante procedimientos geométricos. Partiendo de una cadena cinemática cerrada (figura 2.6):. Figura 2.6: Representación vectorial de una cadena cinemática cerrada..
(39) CAPÍTULO 2. 30. Se definen las variables principales:. 0 O 0 0. Origen del sistema de referencia fijo.. 0 P 0 Origen del sistema de referencia móvil. 950. 560 A1 0 Base del pistón 1. 0 0 A2 560 Base del pistón 2. 0 560 B1 0 Punto B1 de la plataforma móvil. 950. 0 B2 560 Punto B2 de la plataforma móvil. 950 Luego la ecuación vectorial cerrada para una cadena cinemática del robot queda:. ai L Rbi p 0. (2.14). Donde R representa la matriz de rotación (ver su obtención en el Anexo 3). Despejando se obtiene:. Luego. Li Rbi p ai. (2.15).
(40) CAPÍTULO 2 r 11 Li r21 r31. r1 2 r2 2 r3 2. 31. r13 bi x p x ai x r2 3 bi y p y ai y r3 3 bi z p z ai z . (2.16). r b r b r b p x ai x 11 i x 1 2 i y 13 i z Li r21bi x r2 2 bi y r2 3bi z p y ai y r3 bi r32bi r3 bi p z ai y 3 z z 1 x. (2.17). En la ecuación anterior los términos que involucran las funciones trigonométricas que tienen que ver con la rotación alrededor del eje z son cero, ya que el robot no presenta movimiento de guiñada. La longitud de Li puede ser conocida calculando la norma del vector Li, obteniéndose las expresiones que representan la cinemática inversa:. 560 cos 5602 560 sin 9502 L1 10 100 100 . . (2.18). 2 560 cos sin 9502 560 cos 560 2 2 (2.19) L2 10 3136 sin sin 100 100 . De esta forma, el desplazamiento de cada articulación responde a las siguientes ecuaciones, donde q1 y q 2 son los desplazamientos articulares y Lin1 Lin2 950 :. . . . . q1 130 L1 Lin2. q2 130 L2 Lin2. (2.20). (2.21).
(41) CAPÍTULO 2 2.3. 32. Modelo dinámico de los actuadores. Para poder diseñar una estrategia de control para la plataforma de SIMPRO se hace necesario obtener previamente un modelo matemático el cual describa de la manera más exacta posible las características del sistema. Esto permite estudiar e implementar las acciones de control más apropiadas para así poder evaluar su funcionamiento y comprobar si cumplen con las exigencias de desempeño del robot. En el caso de la plataforma que se presenta en este trabajo los actuadores son cilindros electro-neumáticos. Para obtener el modelo dinámico de un cilindro electroneumático, normalmente en la literatura se tienen en cuenta varias consideraciones, como por ejemplo: sólo hay fricción viscosa, la temperatura es constante e igual en todas las cámaras del cilindro, el gas es ideal, y la válvula es perfectamente ajustada y su dinámica despreciable. En la presente investigación el modelo es obtenido de acuerdo a la tesis doctoral de Rubio (Rubio 2009), se tiene en cuenta el subdimensionamiento de la válvula y no se promedian las constantes de tiempo de las cámaras del cilindro, por lo que se obtiene un modelo que describe con mayor exactitud la verdadera dinámica de los actuadores electro-neumáticos. Para obtener el modelo se aplica el método de identificación experimental, sometiendo el sistema a un proceso de identificación experimental que consiste en excitarlo con una señal pseudo-aleatoria, registrar la señal obtenida a la salida, y con ambas, aplicar métodos de estimación de parámetros para determinar el modelo dinámico (Rubio 2009). De esta forma se obtiene un modelo de quinto orden que puede ser reducido a un modelo de tercer orden y se obtiene como resultado la siguiente expresión:. G( s) . ka0 4928 s s 2 a1s a0 s s 2 1.186s 88.22. . . . (2.22).
(42) CAPÍTULO 2 2.4. 33. Control de la plataforma de 2 GDL. El objetivo final que se pretende alcanzar con este control es el seguimiento de una trayectoria deseada en el espacio de tareas para los movimientos de ladeo y cabeceo del robot. Para esto se necesita diseñar un control por retroalimentación tal que el error de seguimiento de trayectoria y(t) - yd(t) sea cero, o lo más pequeño posible. Para esto se propone la estrategia de control de la figura 2.7, similar a (Hernández, Izaguirre et al. 2010). El control del robot se realiza partiendo de conocer el estado de la máquina en el espacio de tareas, o sea, tomando como referencia la posición del elemento terminal. De este modo, los valores deseados para las posiciones articulares, qd, no pueden ser conocidos directamente sino que se obtienen mediante la estimación de la señal de control a la salida del regulador y la solución del problema cinemático inverso. Luego, a la salida del lazo interno las posiciones articulares del robot pueden ser medidas mediante encoders, pero se necesita un modelo cinemático directo para obtener y(t) en el espacio de tareas.. Figura 2.7: Esquema de control en el espacio de tareas propuesto.. En el lazo interno el control se desarrolló según la tesis doctoral de Rubio (Rubio 2009), donde a partir del modelo obtenido se propone un controlador PI en cascada con un filtro de segundo orden para compensar los polos complejos conjugados de la planta, garantizando una adecuada estabilidad relativa, independientemente de las variaciones de los coeficientes. Este controlador tiene la siguiente forma:.
(43) CAPÍTULO 2. 34. . k p s ki s 2 a1m s a0 m S s 2 qd s ss wd . . (2.23). Luego de sintetizado el controlador, suponiendo que la dinámica para cada pistón es la misma, se obtiene la siguiente expresión:. . S s 0.00442s 1.8182 s 2 2087 s 4276000 qd s s s 2 133.3s 8896. . . . (2.24). 2.4.1 Control de posición en el espacio de tareas En el lazo externo se lleva a cabo el control de posición en el espacio de tareas y para garantizar la estabilidad se propone un controlador integral. El esquema de control será implementado digitalmente, Åström (Åström and Wittenmark 1997) sugiere que la razón de muestreo de un sistema de control digital debe estar entre 10 y 30 veces el ancho de banda deseada de lazo cerrado. Para el caso de un simulador de conducción de bajo costo el ancho de banda de lazo cerrado se encuentra alrededor de 0.1 Hz (Hernández, Izaguirre et al. 2010). Por lo que una razón de muestreo para el lazo externo entre 100 y 30 ms sería suficiente para satisfacer las necesidades del sistema. Para analizar el control de trayectoria en el campo digital, el lazo interno puede ser representado como uno o dos retardos de tiempo con respecto al lazo externo (figura 2.8) similar a Peter Corke (Corke 1996).. Figura 2.8: Reducción del esquema de control..
(44) CAPÍTULO 2. De esta forma, tomando un período de. 35. muestreo de 60 ms, la ecuación del. controlador digital queda:. C. 0.06 K I ( Z 1). (2.24). En este sentido el esquema de control en el espacio de tareas puede ser interpretado como sigue:. Figura 2.9: Esquema de control simplificado.. En la figura 2.10 se observa el diagrama del lugar geométrico para el sistema, los polos de lazo cerrado se seleccionaron para una ganancia de K I 0.1 ya que los valores de respuesta transitoria ante entrada paso son satisfactorios para esta ganancia, obteniéndose una respuesta sobreamortiguada con un tiempo de establecimiento de 2.25 segundos..
(45) CAPÍTULO 2. 36. Figura 2.10: Lugar geométrico para el controlador integral con ganancia K I 0.1 .. Este procedimiento se realiza independiente para cada articulación y las figuras 2.11 y 2.12 representan la respuesta del sistema ante señal cuadrada y sinusoidal respectivamente para una articulación cualquiera.. Figura 2.11: Gráfico de respuesta del control de posición ante entrada cuadrada..
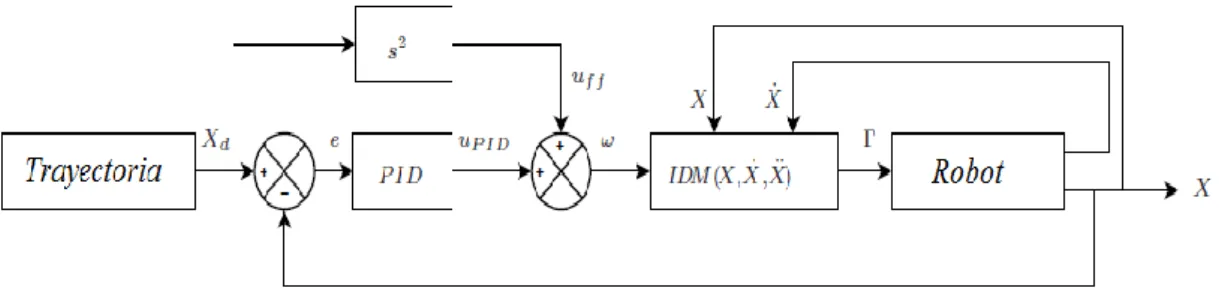
(46) CAPÍTULO 2. 37. Figura 2.12: Gráfico de respuesta del control de posición ante entrada sinusoidal.. 2.4.2 Control de trayectoria en el espacio de tareas. Se puede ver que el control implementado hasta el momento no garantiza un seguimiento de la trayectoria en el espacio de tareas debido a que el error de seguimiento de trayectoria y(t) - yd(t) es demasiado grande como para ser aceptable. Para garantizar el seguimiento de la trayectoria deseada se propone implementar el esquema de control mostrado en la figura 1.18. En este esquema de control planteado por Slotine, el término feedback se encarga de la estabilidad de todo el lazo, y la parte feedforward se calcula invirtiendo el modelo de la planta y será responsable de reducir y eliminar el error de seguimiento. El problema de aplicar este procedimiento es que se hace necesario obtener la señal zYd z , lo cual es prácticamente imposible pues representaría conocer el futuro. Como una solución alternativa a este problema de acuerdo con (Hernández, Urquijo et al. 2010), se retarda la señal de entrada un período de muestreo y la señal feedforward es tomada antes para obtener un efecto similar al deseado (figura 2.13)..
(47) CAPÍTULO 2. 38. Figura 2.13: Implementación del esquema de control de trayectoria.. Con el nuevo esquema de control, para. K f 1 , se obtiene la respuesta que se. observa en la figura 1.14, donde en teoría no existe error de seguimiento de trayectoria.. Figura 2.13: Gráfico de respuesta del control de trayectoria ante señal sinusoidal.. Conclusiones del capítulo . Para poder evaluar una estrategia de control, el modelo lineal de los actuadores juega un papel fundamental, pero obtener este modelo resulta complicado debido, entre otras cosas, a las características no lineales de los sistemas neumáticos..
(48) CAPÍTULO 2 . 39. Tratar cada articulación del robot de forma desacoplada resulta muy conveniente tanto para efectuar el control como para resolver el problema cinemático.. . La aproximación del lazo interno y la cinemática del robot a un retardo de tiempo para el lazo externo simplificó la sintonía del regulador y la implementación del control de trayectoria..
(49) CAPÍTULO 3. 40. CAPÍTULO 3. Análisis de resultados del control de trayectoria para la plataforma de 2 GDL. Según R.E. Shannon (Shannon 1976) la simulación es el proceso de diseñar un modelo de un sistema real y llevar a término experiencias con él, con la finalidad de comprender el comportamiento del sistema o evaluar nuevas estrategias, dentro de los límites impuestos por un cierto criterio o un conjunto de ellos, para el funcionamiento del sistema. En este trabajo la simulación juega un papel importante ya que permite analizar el comportamiento cinemático de la plataforma sin necesidad de someterla a procesos de identificación experimental que pueden dañar la estructura, permitiendo así evaluar las estrategias de control más eficaces para su desempeño.. 3.1. Herramientas de software y hardware. Para realizar las simulaciones; se utilizó una PC con procesador Intel core i3 a una frecuencia de 2.93 GHz y 2 GB de memoria RAM. Esta además de generar la referencia, captura la posición real de la plataforma con vistas a verificar el desempeño del controlador. El intercambio de datos con la plataforma se hace a través de una tarjeta de adquisición de datos Humusoft MF 624 cuyas características se muestran en el anexo 2. Esta tarjeta se comunica con la PC a través del Simulink del Matlab. La señal de las posiciones articulares de ladeo y cabeceo de la plataforma son medidas mediante encoders lineales y se introducen en la tarjeta de adquisición de datos.. Figura 3.1: Arquitectura de hardware..
(50) CAPÍTULO 3 3.2. 41. Simulaciones con el modelo lineal de los actuadores. Para validar las estrategias de control mostradas en el capítulo 2 primeramente se realizaron simulaciones haciendo uso del modelo de la ecuación 2.22. El modelo usado es el mismo para ambas articulaciones por lo que los resultados mostrados en este epígrafe son similares para los movimientos de ladeo y cabeceo.. 3.2.1 Simulación del control de posición. Figura 3.2: Diagrama en Simulink del control de posición.. En las figuras 3.3 y 3.4 se muestran los resultados de la implementación en Simulink (figura 3.2) del control de posición ante señal cuadrada y sinusoidal respectivamente para una amplitud de 6° en la referencia.. Figura 3.3: Simulación del control de posición ante señal cuadrada..
(51) CAPÍTULO 3. 42. Figura 3.4: Simulación del control de posición ante señal sinusoidal. Como se observa en la figura 3.3 el control de posición garantiza un posicionamiento exacto en el espacio de tareas, pero, en la figura 3.4 podemos ver que este control no asegura seguimiento de trayectoria al igual que en la figura 2.12.. 3.2.2 Simulación del control de trayectoria. Figura 3.5: Diagrama en Simulink del control de trayectoria. En la figura 3.6 se observan los resultados de la implementación en Simulink (figura 3.5) del control de trayectoria ante una señal sinusoidal de 6° de amplitud en la referencia. Se observa que la estrategia logra un buen seguimiento de trayectoria con pequeños errores en los momentos de cambio de dirección..
(52) CAPÍTULO 3. 43. Figura 3.6: Simulación del control de trayectoria ante señal sinusoidal.. 3.3. Experimentos con el robot. Al realizar las simulaciones con el modelo lineal de los actuadores se obtuvieron los resultados esperados, de esta forma están creadas las condiciones para evaluar el desempeño de las estrategias de control mediante experimentos con el robot. Las gráficas fueron tomadas del movimiento de ladeo, pero para el cabeceo se obtienen resultados similares.. 3.3.1 Implementación del control de posición en el robot En las figuras 3.7 y 3.8 se observan los resultados de la implementación del control de posición en el robot ante señales cuadrada y sinusoidal respectivamente para una amplitud de 6° y una frecuencia de 0.5 rad/s en la referencia.. Figura 3.7: Respuesta del robot ante señal cuadrada para el control de posición..
(53) CAPÍTULO 3. 44. Figura 3.8: Respuesta del robot ante señal sinusoidal para el control de posición. En la figura 3.7 se puede ver que se logra un posicionamiento exacto de la articulación de ladeo del robot con un tiempo de establecimiento de aproximadamente 5 segundos. Sin embargo en la figura 3.8 se observa la necesidad de aplicar control de trayectoria para corregir el retardo en la señal de salida.. 3.3.2 Implementación del control de trayectoria en el robot En la figura 3.9 se observan los resultados de la implementación del control de trayectoria en el robot ante señal sinusoidal para una amplitud de 6° en la referencia y una frecuencia de 0.3 rad/s.. Figura 3.9: Respuesta del robot ante señal sinusoidal para el control de trayectoria..
(54) CAPÍTULO 3. 45. Este resultado es satisfactorio debido a que cuando el sistema se estabiliza el error nunca supera el grado. El error alcanza su mayor valor en los picos de la señal, en el momento donde la velocidad de la articulación es cero, esto se debe a la fricción de Coulomb. Cabe señalar que los mejores resultados se obtuvieron a frecuencias menores de 0.5 rad/s lo que evidencia que la estrategia propuesta es válida solamente en este rango.. 3.4. Análisis económico. La plataforma objeto de estudio tiene un precio de aproximadamente 12 000 USD con el control implementado, y con la cabina de conducción incluyendo el sistema de visualización y mando oscila entre 30 000 y 40 000 USD. El costo de un paquete de electrodos de soldar por arco eléctrico vale en el mercado 3.00 USD, el metro cuadrado de plancha de acero de 3 mm cuesta 13.00 USD, las articulaciones universales 2.5 USD, y las vigas de acero de perfil U cuestan alrededor de 8 USD el metro, un cilindro neumático de doble efecto 50 USD, de ahí la importancia que reviste realizar un diseño y construcción de la plataforma de manera adecuada, puesto que estos materiales forman parte de los necesarios para construir una plataforma de este tipo. El empleo de esta plataforma de conducción permite el adiestramiento del personal a la hora de conducir un vehículo lo que representa un ahorro de combustible, gomas, rodamientos y piezas de automóviles y se logra el perfeccionamiento de la técnica de conducción evitando accidentes de tránsito. Por último cabe mencionar que esta plataforma contribuye a la formación profesional de estudiantes en la UCLV ya que a raíz de la misma se diseñan y validan estrategias de control y modelos matemáticos, lo cual también representa una ventaja económica considerable..
(55) CONCLUSIONES Y RECOMENDACIONES. 46. CONCLUSIONES Y RECOMENDACIONES Conclusiones Como resultado de este trabajo se ha logrado implementar un sistema de control de trayectoria que garantiza adecuadas prestaciones para los movimientos de la plataforma de sello SIMPRO. Esto ha permitido arribar a las siguientes conclusiones: 1. El control en el espacio de tareas resulta cómodo y efectivo en robots paralelos como el que se ha venido tratando, siempre que se parte de un buen control articular y un buen modelado cinemático y dinámico del robot, además de un sistema capaz de determinar la pose del elemento terminal con suficiente rapidez y precisión. 2. Para obtener un seguimiento de trayectoria en el espacio de tareas se propuso una estrategia de control y se sintonizó el control de posición. El sistema demostró un buen desempeño a partir de la reducción del lazo interno a un retardo de tiempo para el lazo externo. 3. A través del análisis de las simulaciones realizadas, utilizando el modelo lineal del sistema electro-neumático obtenido a partir de identificación experimental, se comprobó el buen desempeño de la estrategia de control seleccionada en cuanto al error de seguimiento de trayectoria. 4. Mediante pruebas reales en la plataforma de 2 GDL se corroboraron los resultados. de. las. simulaciones.. Donde. se. obtuvieron. respuestas. aproximadamente iguales a las simuladas reafirmando el buen desempeño del sistema..
(56) CONCLUSIONES Y RECOMENDACIONES. 47. Recomendaciones Algunas recomendaciones para futuras investigaciones pudieran ser: 1. Que se mejore el control de trayectoria incorporándole seguimiento de velocidad y aceleración. 2. La implementación de una estrategia de control de fuerza para simuladores neumáticos, la cual mejoraría el desempeño del sistema..
(57) REFERENCIAS BIBILIOGRÁFICAS. 48. REFERENCIAS BIBLIOGRÁFICAS. Ali, H. I., S. B. B. M. Noor, et al. (2009). "A Review of Pneumatic Actuators (Modeling and Control)." Australian Journal of Basic and Applied Sciences: 15. Aracil, R., R. Saltarén, et al. (2006). "Robots Paralelos: Máquinas con un pasado para una Robótica del Futuro." Revista Iberoamericana de Automática e Informática Industrial 3: 16-28. Åström, K. and B. Wittenmark (1997). Computer-Controlled Systems. Theory and Design, Prentice Hall. Barrientos, A., L. F. Peñin, et al. (2007). Fundamentos de Robotica, Mc Graw-Hill Interamericana. Bonev, I. (2003). "The True Origins of Parallel Robots." Corke, P. I. (1996). Visual Control of Robots: High-Performance visual servoing, Research Studies Press (John Wiley). 2. Elkady, A., G. Elkobrosy, et al. (2008). Cartesian Parallel Manipulator Modeling, Control and Simulation. Parallel Manipulators, Towards New Applications, Vienna, Austriad. Entenza, P. J. P. (2009). Diseño de una estructura paralela en ADAMS y su enlace con Simulink, Universidad Central “Marta Abreu” de Las Villas. García, C. M. L. (2008). Control virtual de un simulador de conducción, Universidad Central “Marta Abreu” de Las Villas. Guerra, J. E. L. (2011). Estudio cinemático, dinámico y modelado de Plataforma Simulación de 2-GDL., Universidad Central de las Villas. Hernández, L., E. Izaguirre, et al. (2010). "Kinematic Task Space Control Schemefor 3DOF Pneumatic Parallel Robot." Hernández, L., O. Urquijo, et al. (2010). "Tracking task space control for 3DOF pneumatic parallel robot.". Izaguirre, E., L. Hernández, et al. (2011). "Análisis Cinemático y Control Articular Aplicado a Simulador de Movimiento de Estructura Paralela." Revista de Ingeniería Electónica, Automática y Comunicaciones.
(58) REFERENCIAS BIBILIOGRÁFICAS. 49. Izaguirre, E., S. E. Dominguez, et al. (2008). Modelo cinemático y dinámico para robot paralelo de dos grados de libertad. 5ta Conferencia Internacional FIE'08, Santiago de Cuba, Cuba. López, Y. R. (2008). Modelo Cinemático para Robot Paralelo de tres grados de libertad, Universidad Central “Marta Abreu” de Las Villas. Merlet, J. P. (2006). Parallel Robots, Springer, France. Ogata, K. (2002). Ingenieria de Control Moderna. Paccot, F., N. Andreff, et al. (2009). "A review on dynamic control of parallel kinematic machine: theory and experiments." Rubio, E. (2009). Modelación, identificación y control de actuadores electroneumáticos para aplicaciones industriales. Ph.D., Universidad Central "Marta Abreu" de Las Villas. Shannon, R. E. (1976). "Systems simulation: the art and science." IEEE Siciliano, B. and O. Khatib (2008). Handbook of Robotics, Springer. Slotine, J. J. E. and W. Li (1989). Applied Nonlinear Control. Englewood Cliffs, New Jersey. Song, Q., F. Liu, et al. (2006). Improved Fuzzy Neural Network Control for a Pneumatic System Based on Extended Kalman Filter. International Conference on Computational Intelligence for Modelling, Control and Automation. Tsai, L. W. (1999). Robot analysis. The mechanics of serial and parallel manipulators., Wiley-Interscience Publication. Velazco, S. E. D. (2007). Modelo Cinemático y Dinámico para Plataforma de dos grados de libertad, Universidad Central “Marta Abreu” de Las Villas. Zabalza, I. and J. Ros (2007). APLICACIONES ACTUALES DE LOS ROBOTS PARALELOS. 8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA..
(59) ANEXOS. 50. ANEXOS Anexo I: Datos del Cilindro FESTO DNCB-100-320-PPV-A. Principales datos del actuador neumático. Descripción. Parámetro. Modo de operación. Doble acción. Diámetro del Pistón. 100 mm. Movimiento. 320,000 mm. Temperatura ambiente. de -20 a 80 °C. Presión de funcionamiento. de -0,6000 a 12,000 bar. Peso básico para el movimiento de 0 milímetros. 4.575,000 g. Peso adicional por movimiento de 10 milímetros. 101,000 g. Fuerza teórica a 6 bar, con movimiento hacia arriba. 4.712,000 N. Fuerza teórica a 6 bar, con movimiento hacia abajo. 4.418,000 N. Medio de funcionamiento. Aire comprimido seco.
(60) ANEXOS. 51. Anexo II: Características principales de la tarjeta MF 624. . Arquitectura de 32 bit.. . Convertidor A/D de 14 bit con circuito sample & hold simultaneo.. . Rango de entrada de. . 4 contadores de tiempo de 32 bit con resolución de 20 ns.. . Puede ser usado en ranuras de 5 V o 3.3 V.. . 8 convertidores D/A con 14 bit de resolución y voltaje de salida de. . Compatible con puerto de entrada digital de 8 bit TTL.. . Compatible con puerto de salida digital de 8 bit TTL.. . Consumo de energía: 500 mA@+5V, 150 mA@+12V, 150 mA@-12V. . Temperatura de operación de 0°C a +70°C.. 10 V.. Anexo III: Cálculo de la matriz Jacobiana del Robot. Matriz de rotación alrededor del eje x con ángulo de ladeo:. 0 1 MRx 0 cos 0 sin . 0 sin cos . Matriz de rotación alrededor del eje y con ángulo de cabeceo:. cos MR y 0 sin . 0 sin 1 0 0 cos . Matriz de rotación alrededor del eje z:. 10 V..
(61) ANEXOS. 1 0 0 MRz 0 1 0 0 0 1 La matriz de rotación se calcula por el convenio ZYX:. M rot MRz MRy MRx. cos MRz 0 sin . sin sin cos cos sin . cos sin sin cos cos . 52.
(62)
Figure


+7


Outline
Documento similar
Memorias de ultratumba de F.-R. de Chateaubriand, en traducción anónima (1849-1850) Marta Giné Janer
Además de aparecer en forma de volumen, las Memorias conocieron una primera difusión, a los tres meses de la muerte del autor, en las páginas de La Presse en forma de folletín,
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Entre los distintos terminales de los que dispone el dispositivo de National Instrument, para realizar nuestro robot se deben utilizar 6 entradas analógicas (AI,
