Aplicación Android para silla de ruedas, que permita controlarla por comandos de voz, pantalla táctil y programación de ruta
186
0
0
Texto completo
(2) Dedicatoria. Al creador de todas las cosas, el que me ha brindado la fortaleza para continuar en cada una de las etapas de mi vida; por ello, con toda la humildad que puede emanar mi corazón, dedico primeramente este logro a él. A mi madre que ha dado todo de sí para formarme con buenos hábitos, valores y sentimientos, brindándome con un abnegado esfuerzo continuo lo necesario para hoy estar en este punto de mi vida. A mi hermana que es mi modelo a seguir, quien ha estado junto a mí en todo momento, brindándome su apoyo, corrigiéndome cuando estuve errado y siempre impulsándome a ser mejor que ella en el campo profesional, muchas veces tomando el papel de padre. A mi Padre quien a pesar de no estar en todo momento junto a mí, siempre supo cómo reconfortarme en los malos momentos y ser un guía en este camino hacia el éxito. A mi familia en general por siempre creer en mí y apoyarme de forma moral, espiritual y Económicamente en el desarrollo de mi carrera.. Omar de Jesús Carreño Aguirre. 2.
(3) Dedicatoria. Agradezco primeramente a Dios por permitir llegar hasta este punto, haberme dado salud y lo necesario para salir adelante día a día para lograr mis objetivos. A mis padres por haberme apoyado en todo momento, por sus consejos, sus valores, por la motivación constante que me ha permitido ser una persona de bien, pero más que nada por su amor.. Luis Arias Mercado. 3.
(4) Dedicatoria. A Dios por haberme amparado en todo momento. A mi padre, que esperaba con ganas este triunfo. A mi madre, que multiplico sus esfuerzos y me dio fuerzas para terminar mi grado. A mi hermano, que vea con base mi esfuerzo, para que cumpla sus objetivos.. Sergio Andrés Guerrero Palencia. 4.
(5) Agradecimientos. A lo largo del desarrollo de este proyecto tuvimos muchos tropiezos que de una forma u otra retrasaron el proceso del mismo, agradecemos enormemente el apoyo de muchas personas quienes nos impulsaron a seguir adelante y a no desfallecer en el camino a convertirnos en ingenieros, y también dar gracias a todas esas personas que de una forma u otra hicieron parte de este proyecto, en especial al ingeniero José Noguera quien nos asesoró resolviendo muchas dudas, agradecemos al nuestros profesores Leonardo Arias Alemán quien nos guio en el proceso de aprendizaje en el diseño y desarrollo de software, gracias a ello pudimos llevar a cabo una gran parte de este proyecto, con cada una de las materias que nos impartió nos enamoró de la carrera con su amplio conocimiento, gracias al ingeniero José Egurrola que siempre nos infundo un pensamiento más objetivo para abordar los problemas desde diferentes puntos de vista, especial agradecimiento al ingeniero Danilo Juvinao por ser un gran tutor al enseñar con constancia y puntualidad su materia, gracias al docente Luis Carlos Hernández por el apoyo incondicional y por siempre creer que nosotros podemos lograr grandes cosas. Gracias a la Universidad Cooperativa de Colombia por el apoyo y financiamiento del proyecto.. 5.
(6) Contenido. Dedicatoria ....................................................................................................................................... 2 Dedicatoria ....................................................................................................................................... 3 Dedicatoria ....................................................................................................................................... 4 Agradecimientos............................................................................................................................... 5 Lista de ilustraciones ...................................................................................................................... 13 Lista de Tablas ............................................................................................................................... 15 1 Resumen ...................................................................................................................................... 16 2 Abstract ....................................................................................................................................... 17 3 Introducción ................................................................................................................................ 18 4 Planteamiento del problema ........................................................................................................ 19 4.1. Descripción del problema ................................................................................................ 19. 4.2. Formulación del problema ............................................................................................... 19. 5 Objetivos ..................................................................................................................................... 20 5.1. Objetivo General .............................................................................................................. 20. 5.2. Objetivos Específicos ...................................................................................................... 20. 6 Justificación ................................................................................................................................. 21 6.
(7) 6.1. Justificación Teórica ........................................................................................................ 21. 6.2. Justificación metodológica .............................................................................................. 21. 6.3. Justificación practica ....................................................................................................... 22. 7 Alcance y Limitaciones ............................................................................................................... 23 7.1. Alcance ............................................................................................................................ 23. 7.2. Limitaciones .................................................................................................................... 23. 8 Marco de referencias ................................................................................................................... 24 8.1. Antecedentes .................................................................................................................... 24. 8.1.1. Diseño de una silla de ruedas automático encontrando la trayectoria con el Sistema. de Orientación Inteligente. ...................................................................................................... 24 8.1.2. Evaluando la usabilidad de un teléfono para monitorear silla de ruedas ................. 24. 8.1.3. Control de una Silla de Ruedas por Medio de un Dispositivo Móvil con Sistema. Operativo Android. ................................................................................................................. 25 8.1.4. Automatización de una silla de ruedas controlada por comandos de voz. ............... 25. 8.1.5. Red neuronal basada en el control del desacoplamiento diagonal de los sistemas de. silla de ruedas eléctricas. ......................................................................................................... 26 8.1.6. Un enfoque de control visual autónomo para el paso de una silla de ruedas a través. de una puerta en un corredor. .................................................................................................. 26 8.1.7. Optimización para evadir obstáculos por generación de una trayectoria. reconfigurable de una silla de ruedas que sube escaleras. ...................................................... 27. 7.
(8) 8.1.8. Uso de una red inalámbrica de sensores visuales para navegar armónicamente. varias sillas de ruedas de bajo costo en un ambiente interior. ................................................ 27 8.1.9. Una Ondícula y sistema de voz basado en red neuronal para el control de una silla. de ruedas inteligente................................................................................................................ 28 8.1.10. Control neural de los movimientos de una silla de ruedas ....................................... 28. 8.1.11. Desarrollo de un sistema inteligente para una silla de ruedas para un usuario con. discapacidad motriz severa. .................................................................................................... 29 8.1.12. La silla Robótica SENA. Un Enfoque Basado en la Interacción Hombre-Máquina 29. 9 Marco Teórico ............................................................................................................................. 30. 9.1. Inteligencia artificial ........................................................................................................ 30. 9.2. Características de la Inteligencia Artificial...................................................................... 31. 9.3. Automatización ................................................................................................................ 32. 10 Marco Conceptual ..................................................................................................................... 34 10.1 Pwm ................................................................................................................................. 34 10.2 Módulo Arduino .............................................................................................................. 34 10.3 Android ............................................................................................................................ 35 10.4 Android Studio ................................................................................................................ 36 10.4.1. Componentes de Android Studio ............................................................................. 37. 10.5 Puente H .......................................................................................................................... 41 10.5.1. Estructura de un Puente H ........................................................................................ 42. 8.
(9) 10.6 WIFI ................................................................................................................................. 43 10.7 Módulo CC3000 .............................................................................................................. 43 10.8 Odometría ........................................................................................................................ 44 11 Marco contextual ....................................................................................................................... 45 12 Metodología .............................................................................................................................. 46 12.1 Área del conocimiento, área temática y tema .................................................................. 46 12.2 Título y área de investigación .......................................................................................... 46 12.3 Tipo de investigación....................................................................................................... 46 12.4 Método de investigación .................................................................................................. 48 12.5 Fases de la investigación. ................................................................................................ 49 12.5.1. Fase 1: Desarrollo del estado del arte....................................................................... 49. 12.5.2. Fase 2: Construcción e implementación de código .................................................. 49. 12.5.3. Fase 3: Generación documento y manual................................................................. 49. 12.6 Técnicas e instrumentos metodológicos .......................................................................... 50 12.6.1 12.6.1.1. Técnicas .................................................................................................................... 50 Fuente primaria ..................................................................................................... 50. 12.7 Planificación .................................................................................................................... 51 12.8 Recursos Humanos .......................................................................................................... 51 12.9 Cronograma de actividades.............................................................................................. 52 13 Delimitaciones del proyecto ...................................................................................................... 56 9.
(10) 13.1 Delimitación del problema .............................................................................................. 56 13.2 Delimitaciones del espacio .............................................................................................. 56 13.3 Delimitaciones del tiempo. .............................................................................................. 57 14 Descripción del sistema ............................................................................................................. 58 14.1 Diagramas del sistema ..................................................................................................... 58 14.1.1. Diagrama de envío de datos ..................................................................................... 58. 14.1.2. Diagrama de recepción de datos............................................................................... 63. 14.1.3. Esquema representativo del sistema de conexión .................................................... 64. 14.1.4. Protocolo de conexión con módulo cc3000 ............................................................. 65. 14.1.5. Protocolo conexión con silla de ruedas .................................................................... 66. 14.1.6. Explicación de pines de las tablas 1 y 2 ................................................................... 66. 14.1.7. Diagrama de clases del aplicativo Android .............................................................. 68. 14.1.8. Explicación de variables........................................................................................... 69. 14.2 Diseño de aplicativo ........................................................................................................ 73 14.3 Etapa de procesamiento ................................................................................................... 80 15 Pruebas ...................................................................................................................................... 82 16 Nuevos aportes y controversias conceptuales ........................................................................... 99 17 Descripción de las dificultades y las estrategias para confrontarlas creativamente ................ 100 17.1 Dificultades .................................................................................................................... 100 17.2 Soluciones ...................................................................................................................... 100 10.
(11) 18 Conclusiones y recomendaciones............................................................................................ 102 18.1 Conclusiones .................................................................................................................. 102 18.2 Recomendaciones .......................................................................................................... 103 19 Anexos ..................................................................................................................................... 104 19.1 Código Arduino para el control de la silla de ruedas..................................................... 104 19.2 Código Arduino neurona ............................................................................................... 113 19.3 Código Android ............................................................................................................. 121 19.3.1. MainActivity.java (ENVIO POR PANTALLA TACTIL) .................................... 121. 19.3.2. Main2Activity.java (ENVIO DE RUTA) .............................................................. 125. 19.3.3. Voz.java (ENVIO POR VOZ) ............................................................................... 130. 19.4 Diagrama de flujo Código Arduino ............................................................................... 135 19.5 Proyecto App Silla de Ruedas ....................................................................................... 138 19.5.1. Organización .......................................................................................................... 138. 19.6 Participantes................................................................................................................... 139 19.7 Reuniones ...................................................................................................................... 141. 19.8 Objetivos ........................................................................................................................ 145 19.9 Requisitos ...................................................................................................................... 147 19.9.1. Funcionales............................................................................................................. 147. 19.9.2. No funcionales........................................................................................................ 149. 20 Actores .................................................................................................................................... 150 11.
(12) 21 Casos de uso ............................................................................................................................ 151 21.1 Envío por voz................................................................................................................. 153 21.2 Pantalla Táctil ................................................................................................................ 155 21.3 Ruta Definida ................................................................................................................. 158 22. Pruebas .............................................................................................................................. 168. 22.1 Módulo de voz ............................................................................................................... 168 22.2 Pantalla Táctil ................................................................................................................ 173 22.3 Ruta Definida ................................................................................................................. 178 23 Diagrama de secuencia ............................................................................................................ 181 23.1 Pantalla táctil ................................................................................................................. 181 23.2 Modulo de voz ............................................................................................................... 182 23.3 Ruta Definida ................................................................................................................. 183 24 Bibliografía .............................................................................................................................. 184. 12.
(13) Lista de ilustraciones. Figura 1: Logo oficial de Android. Fuente: https://es.wikipedia.org/wiki/android........................ 36 Figura 2: Mesa de trabajo Android Studio. Fuente: Propia ............................................................ 37 Figura 3: Ejemplo de una activity. Fuente: http://www.itcsolutions.eu/2011/08/31/android-tutorial how-to-create-and-display-a-new-form-window-or-activity/ ........................................................ 38 Figura 4: Widgets en pantalla Android. Fuente: http://www.pcworld.com.mx/Articulos/24531.htm ....................................................................... 39 Figura 5: Ejemplo de código java que invoca un servicio. Fuente: https://developer.android.com/guide/components/services.html ................................................... 40 Figura 6: Estructura de un puente H, fuente :(Mancilla, Crespo, & Navarro, 2012, pág. 7) ......... 41 Figura 7: Estados básicos del puente h, fuente: (Mancilla, Crespo, & Navarro, 2012) ................. 42 Figura 8: Método de investigación Fuente: Propia ........................................................................ 48 Figura 9: Diagrama de envió de datos desde el aplicativo Android. Fuente: Propia ..................... 58 Figura 10: Envío de datos por ruta definida. Fuente: propia .......................................................... 60 Figura 11: Envío de datos por pantalla táctil. Fuente: Propia ........................................................ 61 Figura 12: Envío de datos por comando de voz. Fuente: Propia .................................................... 62 Figura 13: Diagrama de recepción de datos en el módulo Arduino en la silla de ruedas. Fuente: Propia ............................................................................................................................................. 63 Figura 14: Esquema de conexión Fuente: Propia, Utilizando fritzing ........................................... 64 Figura 15: Diagrama de clases. Fuente: propia, Paint Con el estilo Enterprise Architect ............. 68 Figura 16: Pantalla de inicio de aplicación Android. Fuente: propia. ............................................ 73 Figura 17: Pantalla de Ruta de la aplicación Android. Fuente: propia........................................... 74 13.
(14) Figura 18: Pantalla de voz de la aplicación Android. Fuente: propia. ........................................... 75 Figura 19: Panel de captura de voz dela aplicación Android. Fuente: propia ................................ 76 Figura 20: Pantalla de panel táctil de la aplicación Android. Fuente: propia. ............................... 77 Figura 21: Foto silla de ruedas. Fuente: propia. ............................................................................. 79 Figura 22: Panel de control Silla de Ruedas. Fuente: propia. ........................................................ 80 Figura 23: Verificación de la conexión del módulo wifi en la interface de Arduino. Fuente: Propia ........................................................................................................................................................ 84 Figura 24: Envío de comando adelante por parte del aplicativo. Fuente: Propia ........................... 85 Figura 25: Envío de comando izquierda por parte del aplicativo. Fuente: Propia ......................... 86 Figura 26: Envío de comando derecha por parte del aplicativo. Fuente: Propia............................ 87 Figura 27: Envío de comando detener por parte del aplicativo. Fuente: Propia ............................ 88 Figura 28: Envío de comando atrás por parte del aplicativo. Fuente: Propia ................................ 89 Figura 29: Recepción de los comandos. Fuente: Propia ................................................................ 90 Figura 30: Mapas de pruebas. Fuente: Propia ................................................................................ 90 Figura 31: Ruta definida en el aplicativo desde el dispositivo móvil. Fuente: Propia ................... 93 Figura 32: Ruta definida por comando en el aplicativo desde el dispositivo móvil. Fuente: Propia ........................................................................................................................................................ 95 Figura 33: Ruta definida por pantalla táctil en el aplicativo desde el dispositivo móvil. Fuente: Propia ............................................................................................................................................. 97. 14.
(15) Lista de Tablas. Tabla 1 protocolo de conexión con modulo. Fuente: propia .......................................................... 65 Tabla 2 protocolo de conexión con silla de ruedas. Fuente: propia ............................................... 66 Tabla 3 explicación de las variables utilizadas. Fuente propia ...................................................... 72 Tabla 4 tabla de pruebas. Fuente propia ......................................................................................... 84 Tabla 5 detalles del mapa n1, por pantalla táctil. Fuente: propia ................................................... 92 Tabla 6 detalles del mapa n2, por comando de voz. Fuente: propia .............................................. 94 Tabla 7 detalles del mapa n3, por ruta definida. Fuente: propia .................................................... 96. 15.
(16) 1. Resumen. En el presente trabajo se realizó el diseño y la implementación de un aplicativo en el sistema operativo Android para dispositivos móviles para el manejo de usa silla de ruedas eléctrica, tal proceso implico la implementación de módulos Arduino que permiten a todo el sistema estar conectado a wifi. El aplicativo cuenta con tres tipos diferentes de control, como lo son el control por pantalla táctil, el control por voz y el control por trazado de ruta, a partir de las pruebas realizadas se determinó que, al momento de utilizar la aplicación móvil, tanto esta como la silla deben estar ubicados en la misma red wifi, estar dentro el rango de los mismos y no tener implementado alguna configuración que pueda bloquear la comunicación dispositivo-silla tales como proxys. El correcto funcionamiento de la silla de ruedas está demostrado para superficies planas y usuarios que no superen un peso de 100kg.. 16.
(17) 2 Abstract. In this paper the design and implementation of an application on the Android operating system for mobile devices for handling chair uses electric wheelchair was made, such process involved implementing Arduino modules that allow the entire system to be connected to wifi. The application has three different types of control, such as the touch screen control, voice control and the control trace route, from tests it was determined that, when using the mobile application, both this as the chair must be located in the same wifi network, be within the range of them and not having implemented some settings that can block the device-chair communication such as proxies. The proper functioning of the wheelchair is shown for flat surfaces and users that do not exceed a weight of 100kg.. 17.
(18) 3. Introducción. El proyecto “Aplicación Android para silla de ruedas, que permita controlarla por comandos de voz, pantalla táctil y programación de ruta.” fue realizado para optar al título de Ingeniero de sistemas de la Universidad Cooperativa de Colombia y comprobar la viabilidad del mismo en beneficio de la sociedad aplicando innovación por medio de las nuevas tecnologías. En este documento se pretende demostrar el potencial que ofrecen este tipo de aplicaciones para mejorar la calidad de vida de las personas en estado de movilidad reducida, con impedimentos físicos, sensoriales o cognitivos, por lo que este proyecto se concibe con la intensión de desarrollar un sistema de control modular y de bajo costo que permita el movimiento de una silla de ruedas en diferentes entornos.. 18.
(19) 4. Planteamiento del problema. 4.1. Descripción del problema. Desde el año 1869, la silla de rueda ha sido una importante herramienta para todas aquellas personas que sufren de algún problema de locomoción o movilidad reducida, esta pieza ha sido ampliamente estudiada y rediseñada para adaptarse a las necesidades de las personas, la silla de ruedas eléctrica nos provee de un uso tecnológico avanzado con muchos componentes que facilitan la vida diaria. (Michael Boninger, 2011) Con el fin de reducir la necesidad de uso manual, El presente trabajo pretende desarrollar una aplicación para dispositivos móviles que permita el control de la silla de ruedas.. 4.2. Formulación del problema. El problema de la movilidad de las personas discapacitadas es un problema de una población que ha sido aislada de alguna manera por la sociedad.. ¿Cómo implementar un sistema de control por aplicaciones celulares para facilitar la movilidad, reducir el esfuerzo de las personas, y mejorar su calidad de vida?. 19.
(20) 5 Objetivos. 5.1. Objetivo General. Desarrollar una aplicación móvil para silla de ruedas, que contenta un manejo por Pantalla táctil, comandos de voz y permita la programación de una ruta.. 5.2. Objetivos Específicos. 1. Desarrollar una aplicación celular para maniobrar la silla de ruedas por medio del panel táctil del celular. 2. Incorporar un sistema de manejo de la silla por comandos de voz. 3. Programar un sistema de manejo por ruta en entorno definido para la silla. 4. Acoplar un sistema de control con redes neuronales.. 20.
(21) 6 Justificación. 6.1. Justificación Teórica. La Universidad Cooperativa de Colombia, sede Santa Marta, posee un excelente cuerpo de docente en el área de la ingeniería, también posee una base de datos e implementos de laboratorio, este proyecto es una actualización del proyecto presentado anteriormente, la silla de ruedas controlada por el movimiento de los ojos, este proyecto se busca motivar a los estudiantes para continúen implementando nuevas mejoras tecnológicas dejando como base este proyecto para así poder crear redes con los que los estudiantes y los docentes se motiven al desarrollo e investigación, los programas utilizados fueron creados en el sistema operativo de celulares Android, y el control de la silla de ruedas fue realizado a través de Arduino.. 6.2. Justificación metodológica. Los modelos presentados en el proyecto pueden ser modificados por cualquier estudiante interesado en el tema, con conocimientos básicos, para futuras investigaciones. La investigación realizada arrojo como resultado la utilización del sistema Android para los dispositivos móviles, para él envió de datos se utiliza clases conocidas de java, la recepción de datos se realiza a través de un módulo de Arduino. La presentación de una silla de ruedas asistida. 21.
(22) por un celular es una buena elección que permitirá mejor la calidad de vida a la población con movimiento reducido.. 6.3. Justificación practica. La necesidad de un sistema de control el cual transmitir los datos de la aplicación Android a la silla de ruedas dirigido por la universidad cooperativa de Colombia, fue el principal motivo por el cual se desarrolló este sistema; la finalidad del sistema es garantizar el movimiento de la silla de ruedas controlado por la aplicación móvil.. 22.
(23) 7 Alcance y Limitaciones. 7.1. Alcance. El proyecto se desarrolló en la Universidad Cooperativa de Colombia, sede Santa Marta. Tras probar los diferentes módulos para la conectividad, se escogió el módulo wifi, se tomó la decisión de trabajar con el dispositivo WIFI CC300, el cual ofrece un alcance y velocidad pertinentes, en base a esto se llevaron a cabo pruebas para probar la eficiencia del dispositivo, En definitiva, se optó por este para cumplir con el objetivo principal del proyecto, desarrollar el Sistema de Control por Aplicación Celular, el prototipo se probará en un recinto cerrado y con ambiente controlado.. 7.2. Limitaciones. La principal limitación en este proyecto es el alcance de los dispositivos, el módulo de wifi necesita un punto de conexión con un modem de internet, y se ve limitado a las interferencias características del protocolo wifi.. 23.
(24) 8 Marco de referencias. 8.1. Antecedentes. Durante la investigación encontramos distintas implementaciones de sillas de ruedas autónomas, Dentro de estas destacamos:. 8.1.1. Diseño de una silla de ruedas automático encontrando la trayectoria con el Sistema de Orientación Inteligente.. En España (Mjumder, Banerjee, & cresta, 2011) presentaron un proyecto de silla de ruedas, el cual consiste en: Una silla de ruedas motorizada convencional que ha sido equipada con sensores y programada con un sistema de guía inteligente para maniobrar de manera eficiente a sí misma automáticamente, a partir de un punto a otro en una instalación equipada con una red de sensores que proporcionan a la silla de ruedas un mapa básico de su curso.. 8.1.2. Evaluando la usabilidad de un teléfono para monitorear silla de ruedas. De acuerdo con (Yu-Kuang, Hsin-Yi, Annmarie, Jonathan, & Rory, 6 march 2015) , se realizó un estudio para verificar la usabilidad de las aplicaciones de monitoreo de sillas de ruedas, donde el objetivo de estas aplicaciones era brindar un sistema de aviso previo que alertara al usuario cuando está haciendo uso indebido de una silla de ruedas, para generar las alertas se hizo uso de unas recomendaciones clínicas. Este estudio evaluó la facilidad con la que se manejan estas. 24.
(25) aplicaciones mediante la recopilación de información a partir de cinco usuarios que utilizaban sillas de ruedas y cinco profesionales en el campo de la rehabilitación mediante cuestionarios y entrevistas, el cual presento como conclusión que esas Apps son de ayuda útil en usuarios y rehabilitadores profesionales.. 8.1.3. Control de una Silla de Ruedas por Medio de un Dispositivo Móvil con Sistema Operativo Android.. De acuerdo con (Mancilla, Crespo, & Navarro, 2012) se presentó una propuesta de un prototipo de una silla de ruedas para motorizarla y controlarla por medio de un dispositivo móvil con Sistema Operativo Android, que surgió como respuesta a la necesidad de desplazamiento que enfrentan niños y niñas con discapacidad motriz. La utilización de una silla de ruedas motorizada de bajo costo y manipulada por el propio usuario a través de un sistema móvil resulta una valiosa alternativa. El prototipo obtenido se diseñó de acuerdo a las especificaciones de los terapeutas y asesores de la UOP (Unidad de Orientación al Público, en Tuxtla) y fue evaluado satisfactoriamente con niños y niñas de esta institución.. 8.1.4. Automatización de una silla de ruedas controlada por comandos de voz.. Según (Garcia Pardo, feizzola, & calderon, 2003) se diseñó un Sistema que incluye diversos campos de la electrónica como lo son: el tratamiento de señales, la electrónica de potencia, la inteligencia artificial y el campo de control y la automatización. Todo esto concentrado en una silla de ruedas automatizada la cual posee un sistema automático de movimiento y un módulo reconocimiento de voz, donde su control se realiza a través de sencillos comandos como: 25.
(26) Adelante, atrás, derecha, izquierda y pare. El modulo que realiza el procesamiento de la voz en el sistema, es el sistema de desarrollo “Voice Direct 364”, el cual en un circuito integrado incluye un DSP (Dispositivo de Protección contra Sobretensiones) y una red neuronal, el DSP realiza el procesamiento de la señal y la red neuronal realiza la identificación de la palabra.. 8.1.5. Red neuronal basada en el control del desacoplamiento diagonal de los sistemas de silla de ruedas eléctricas.. En este trabajo (Nguyen, Su, & Nguyen, 2013) proponen un método de control de desacoplamiento diagonal avanzado para sistemas de silla de ruedas eléctrica. Este método de control se basa en una combinación de la técnica de diagonalización sistemática y el diseño de control de red neural. Como tal, este método de control reduce los efectos de acoplamiento en un sistema multivariable, dando lugar a procedimientos de diseño de control independientes. El uso de un modelo dinámico obtenido, el problema del cálculo Jacobiano de la planta se elimina en un diseño de control de la red neural. La eficacia del método de control propuesto se verifica en una aplicación en tiempo real en un sistema de silla de ruedas eléctrica.. 8.1.6. Un enfoque de control visual autónomo para el paso de una silla de ruedas a través de una puerta en un corredor.. La motivación del trabajo realizado por (Pasteau, Narayanan, Babe, & Chaumette, 2016) proviene en parte del hecho de que los sensores de bajo costo como sensores de visión podrían ser empleados en el diseño de sistemas autónomos. El objetivo es desarrollar una solución para la navegación autónoma en silla de ruedas en un ambiente interior mediante un conjunto de cámaras monoculares con cada uno de ellos está dedicado a una tarea en particular. Tales sistemas de sillas de ruedas semi-autónomas serían útiles en condiciones en que las deficiencias motoras 26.
(27) puedan obstaculizar la navegación segura y eficaz, proporcionando asistencia segura en la realización de las tareas fundamentales que proporciona un control de alto nivel para el usuario. Los resultados de experimentos en una silla de ruedas robótica muestran que el sistema es capaz de ejecutarse con firmeza en diferentes pasillos con una variedad de representaciones de puertas.. 8.1.7. Optimización para evadir obstáculos por generación de una trayectoria reconfigurable de una silla de ruedas que sube escaleras.. Se desarrolló un prototipo de una silla de ruedas capaz de subir escaleras, siguiendo una característica clave en el diseño mecánico, el cual es la implementación de dos mecanismos desconectados en cada eje, uno para distribuir medidas, y el otro para posicionar el eje con respecto a la silla con el fin de adaptarse a la pendiente general. Este diseño simplifica considerablemente la tarea de control. Los Modelos cinemáticos son necesarios para describir el comportamiento del sistema y para controlar los grados de libertad accionados de la silla de ruedas con el fin de garantizar la comodidad del pasajero. (González, Morales, & Feliu , 2010).. 8.1.8. Uso de una red inalámbrica de sensores visuales para navegar armónicamente varias sillas de ruedas de bajo costo en un ambiente interior.. Según (Tian, Chao , Feng, Xing , & Shah , 2016) “la navegación de sillas de ruedas robóticas de bajo costo en una topología de nodos de sensores inalámbricos que se implementan en un entorno dinámico y lleno de gente en interiores es un problema difícil de tiempo polinómico no determinista (NP-duro)”. Para la solución de dicho problema se propone un algoritmo de 27.
(28) navegación distribuida multi-logica de ruedas global. El algoritmo posee distintivas características como son la navegación de búsqueda global y las capacidades locales de resolución de conflictos. En el algoritmo propuesto, un método de predicción de tiempo de viaje adopta una penalización por posibles conflictos sobre la base de las sillas de ruedas 'prioridad, la velocidad y la distancia entre los nodos.. 8.1.9. Una Ondícula y sistema de voz basado en red neuronal para el control de una silla de ruedas inteligente.. (AL-Rousan & Assaleh , 2011) Presentan un diseño de un sistema automatizado de silla de ruedas eléctrica que integra las últimas tecnologías, para ayudar a los usuarios con discapacidad motora, en el desplazamiento de la misma y en el envío de mensajes de ayuda a cuatro destinos diferentes por medio de mensajes SMS. Un usuario puede mover la silla de ruedas con una de las tres técnicas integradas en ella: un joystick, botones de dirección o de voz. Por otra parte, la velocidad de la silla de ruedas se puede controlar mediante dos botones (lento y rápido). Para el reconocimiento de los comandos de voz, el sistema utiliza wavelets (Ondiculas) y redes neuronales para la extracción de características y la clasificación, respectivamente.. 8.1.10. Control neural de los movimientos de una silla de ruedas. De acuerdo con (Boquete, García, Barea, & Mazo, 1999) existen problemas al controlar los movimientos de la silla de ruedas motorizada de una persona con discapacidad desde un punto de vista práctico. El sistema de control implementado se ha dividido en dos plantas: el "bajo nivel", que consiste en un sistema electrónico que controla directamente los controladores de los motores de la silla. El objetivo de este nivel es asegurar que las velocidades de cada una de las ruedas sean similares a la velocidad de entrada de estos tableros de control. El segundo nivel de control ("alto 28.
(29) nivel"), ejecutado por medio de técnicas neuronales, asegura que las velocidades lineales y angulares de la silla de ruedas son los indicados por un generador de trayectoria.. 8.1.11 Desarrollo de un sistema inteligente para una silla de ruedas para un usuario con discapacidad motriz severa. “Los usuarios con deficiencia motora severa pueden tener dificultades para operar una silla de ruedas cuando están en espacio reducido (por ejemplo, puerta de entrada que pasa) o al evitar obstáculos ya que no pueden ordenar a la silla de ruedas por medio de una palanca de mando convencional.” (Tomari, Kobayashi, & Kuno , 2012). Estos autores proponen un marco teórico que puede ser útil a los usuarios a superar las circunstancias adversas utilizando una estrategia de control semiautónomo jerárquica. Inicialmente, las entradas de usuario multimodal basado en el ángulo de guiñada y la cabeza del interruptor momentáneo se analizan para decidir un modo de maniobra y asignar la dirección de la marcha. A continuación, la información ambiental se percibe mediante la combinación de un telémetro láser y el sensor Kinect para determinar el mapa de seguridad alrededor de la vecindad de la silla de ruedas.. 8.1.12. La silla Robótica SENA. Un Enfoque Basado en la Interacción Hombre-Máquina. Los autores (González, y otros, 2008) presentan la silla de ruedas robotizada SENA. “SENA se basa en una silla eléctrica comercial a la que se ha integrado una serie de sensores y dispositivos que son gestionados mediante un ordenador portátil”. Dicho dispositivo está caracterizado por la capacidad que posee para navegar de forma autónoma en espacios interiores, su habilidad para interactuar, de un forma fácil, y cooperar con el usuario o personas del entorno gracias, entre otros, a una arquitectura software desarrollada específicamente para robots asistente. 29.
(30) 9 Marco Teórico. 9.1. Inteligencia artificial. Según (Álvarez, 1991), La inteligencia artificial es considerada una rama de la computación y relaciona un fenómeno natural con una analogía artificial a través de programas de computador. La inteligencia artificial puede ser tomada como ciencia si se enfoca a la elaboración de programas basados en comparaciones con la eficiencia del hombre, contribuyendo a un mayor entendimiento del conocimiento humano. La Inteligencia Artificial incluye varios campos de desarrollo tales como: la robótica, usada principalmente en el campo industrial; comprensión de lenguajes y traducción; visión en máquinas que distinguen formas y que se usan en líneas de ensamblaje; reconocimiento de palabras y aprendizaje de máquinas; sistemas computacionales expertos. (Henao, 2000, pág. 10). La silla de rueda ha suplido necesidades de muchas personas discapacitadas, pero algunas no están del todo satisfechas por lo que estas no presentan las mismas necesidades, por este motivo tantos ingenieros como diseñadores han acoplado la Inteligencia artificial, ya que permiten que las máquinas analicen y reconozcan patrones de comportamiento y adquieran estrategias para la solución de problemas mediante ejemplos, de forma análoga a como lo haría la mente humana. (Gómez Barrios, 2013) Los investigadores desarrollaron unos algoritmos que permiten a la silla adaptarse a la densidad y la velocidad de los objetos en su camino para encontrar una forma más eficaz de funcionar y no ir por ejemplo, a contracorriente de una multitud que va en cierta dirección. Finalmente, después de. 30.
(31) traducir las señales y saber hacia dónde se quiere mover, se transmiten los resultados a un actuador.. 9.2. Características de la Inteligencia Artificial.. 1. Los Métodos de inteligencia artificial se distingue de los métodos numéricos por una característica principal y es el uso de símbolos no matemáticos, no obstante esto no es suficiente para distinguirlo completamente. Otros programas como los sistemas de bases de datos y compiladores, procesan símbolos también y estos no se les consideran el uso de técnicas de Inteligencia Artificial. 2. El comportamiento de los programas no es descrito explícitamente por el algoritmo. La secuencia de pasos seguidos por el programa es influenciado por el problema particular presente. El programa especifica cómo encontrar la secuencia de pasos necesarios para resolver un problema dado (programa declarativo). En contraste con los programas que no son de Inteligencia Artificial, que siguen un algoritmo definido, que especifica, explícitamente, cómo encontrar las variables de salida para cualquier variable dada de entrada (programa de procedimiento). Las conclusiones de un programa declarativo no son fijas y son determinadas parcialmente por las conclusiones intermedias alcanzadas durante las consideraciones al problema específico. Los lenguajes orientados al objeto comparten esta propiedad y se han caracterizado por su afinidad con la Inteligencia Artificial. 3. Estos programas incorporan factores y relaciones del mundo real y del ámbito del conocimiento en que ellos operan, es decir, implementan el Razonamiento basado en el conocimiento. Programas como los de contabilidad y cálculos científicos, son programas. 31.
(32) realizados para un propósito específico, a diferencia de estos; los programas de Inteligencia Artificial pueden distinguir entre el programa de razonamiento y base de conocimientos dándole la capacidad de exponer discrepancias entre ellas. 4. Aplicabilidad a datos y problemas mal estructurados, sin las técnicas de Inteligencia Artificial los programas no pueden trabajar con este tipo de problemas. Un ejemplo es la resolución de conflictos en tareas orientadas a metas como en planificación, o el diagnóstico de tareas en un sistema del mundo real: con poca información, con una solución cercana y no necesariamente exacta.. 9.3. Automatización. La automatización es la acción de convertir un proceso manual o semiautomático en uno automático, es decir que el proceso se lleve a cabo de forma totalmente automática, con el fin de reducir y facilitar trabajos. En la actualidad la tecnología ha avanzado de manera drástica y más en áreas de la ingeniería, innovando para satisfacer necesidades que antes no era posible. Una de las primeras innovaciones tecnológicas, la silla de rueda fue desarrollada por ingenieros mecatrónicos debido a las diferentes necesidades que han tenido las personas discapacitadas. Dado que las discapacidades que estas personas padecen no generan las mismas necesidades, por este motivo se necesita que la silla de rueda sea lo más automatizada posible. De esta manera ingenieros y diseñadores han analizados estas discapacidades para diseñar una silla de rueda que satisfaga todas esas. 32.
(33) necesidades, en general la innovación de la silla de rueda ha avanzado para que esta tenga una mejor capacidad en cuanto a movimiento, y en cuanto a la interfaz hombre-máquina.. 33.
(34) 10 Marco Conceptual. 10.1 Pwm. Según ( Torrente Artero , 2013), PWM es una señal digital cuadrada que simula ser una señal analógica. El valor simulado de la señal analógica dependerá de la duración que tenga el pulso digital (es decir, el valor ALTO de la señal PWM). Si el segundo parámetro de esta función vale 0, significa que su pulso no dura nada (es decir, no hay señal) y por tanto su valor analógico “simulado” será el mínimo (0v).. PWM o modulación por ancho de pulso es una técnica de control con base a la variación del ciclo útil de una onda cuadrada para controlar el voltaje de entrada a una carga. Básicamente con esta técnica se le suministra tensión a la carga mientras esté en su ciclo útil y la tensión que llega a la carga se considera como la tensión de entrada multiplicada por el ciclo útil de la señal ( Grupo de Arquitectura y Tecnología de Computadore, 2007).. 10.2 Módulo Arduino. Según (Arduino, 2014), un módulo Arduino es una plataforma electrónica de código abierto (C) basado en un hardware y el software fácil de usar. Está dirigido a cualquier persona que realice proyectos interactivos. Fue inventado por primera vez en finales de 2005 en Ivrea, Italia por. 34.
(35) Massimo Banzi y David Cuartielles y consiste básicamente de una pieza sencilla de hardware. (Bayle , 2013).. Arduino Mega 2560 R3 Como su nombre indica, la Mega 2560 es una placa más grande que el Arduino Uno. Es para personas que quieren más: más entradas, salidas, más y más potencia de procesamiento. El Mega tiene 54 pines digitales y 16 pines analógicos en comparación con los 15 digital y 6 pines analógicos de la Uno. (Nussey, 2013).. 10.3 Android. Android es un sistema operativo multi-dispositivo, inicialmente diseñado para teléfonos móviles. En la actualidad se puede encontrar también en múltiples dispositivos, como ordenadores, tabletas, GPS, televisores, discos duros multimedia, mini ordenadores, cámaras de fotos, etcétera. Incluso se ha instalado en microondas y lavadoras. (Robledo Fernández, 2000, pág. 11). Este sistema operativo permite programar aplicaciones empleando una variación de Java llamada Dalvik, y proporciona todas las interfaces necesarias para desarrollar fácilmente aplicaciones que acceden a las funciones del teléfono (como el GPS, las llamadas, la agenda, etcétera) utilizando el lenguaje de programación Java. Como se observa en la Figura 1 vemos el logo del sistema Android muy simple. Su sencillez, junto a la existencia de herramientas de programación gratuitas, es principalmente la causa de que existan cientos de miles de aplicaciones disponibles, que amplían la funcionalidad de los dispositivos y mejoran la experiencia del usuario. (Robledo Fernández, 2000, pág. 11). 35.
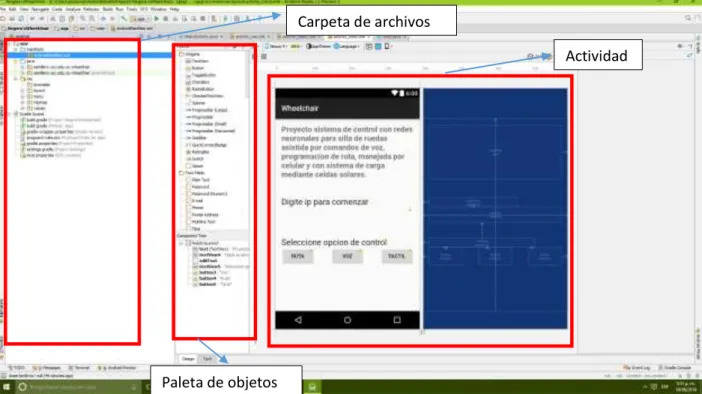
(36) Figura 1: Logo oficial de Android. Fuente: https://es.wikipedia.org/wiki/android. 10.4 Android Studio. El IDE oficial para Android, Android Studio proporciona las herramientas más rápidas para la creación de aplicaciones en todo tipo de dispositivo Android. Depuración, herramientas de rendimiento, un sistema de construcción flexible y una acumulación instantánea / sistema de desplegar todos le permiten centrarse en la construcción aplicaciones únicas y de alta calidad. (Google, s.f.). En la Figura 2 se puede ver la mesa de trabajo de Android Studio la cual está en la fase de creación de una activity, con la paleta de objetos a la izquierda y la activity en el centro. La interface se desarrolló en Android, por ser una plataforma de desarrollo libre para aplicaciones con gran riqueza e innovaciones (sensores, localización, servicios, etc.). “Una de las mayores fortalezas del entorno de aplicación de Android es que se aprovecha del lenguaje de programación Java. El SDK de Android no acaba de ofrecer todo lo disponible para su estándar del entorno de ejecución Java (JRE), pero es compatible con una fracción muy significativa de la misma”.. 36.
(37) Carpeta de archivos Actividad. Paleta de objetos Figura 2: Mesa de trabajo Android Studio. Fuente: Propia. 10.4.1 Componentes de Android Studio Toda Aplicación Android posee elementos esenciales denominados Componentes. Cada uno de estos componentes es un punto distinto de entrada por medio del cual el sistema operativo puede interactuar con la aplicación. Ahora bien, no siempre un componente es un punto de entrada, sino que unos dependen de otros, aunque cada uno exista como una entidad aislada en Android y ejecute un papel determinado que define el comportamiento general de la aplicación. (Robledo , Fernández, & Robledo, 2011, pág. 37). 37.
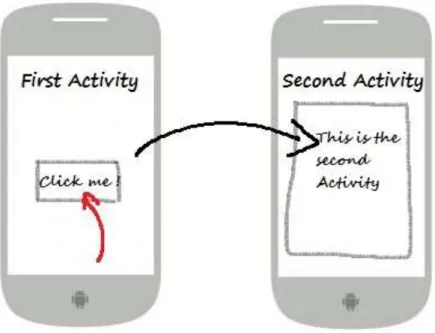
(38) Actividades (Activities): Una pantalla única con una interfaz de usuario se denomina actividad, por ejemplo, una aplicación de correo electrónico puede tener una actividad que muestra una lista de correo electrónico nuevo, otra actividad que compone un correo y otra actividad que lee los mensajes. Aunque las actividades trabajan conjuntamente para dar la sensación de una única aplicación, cada una de es autónoma de las otras. Por lo tanto, otra aplicación externa diferente podría arrancar cualquiera de estas actividades (si la aplicación de correo electrónico lo permite). Por ejemplo, una aplicación que gestiona los contactos podría iniciar la actividad que compone nuevos mensajes de correo indicando como destinatario del mensaje al contacto elegido en la primera aplicación. Tal como se muestra en la Figura 3 podemos ver dos actividades interactuando entre sí, una actividad invoca a la otra, para el usuario esto sería como pasar página en un libro.. Figura 3: Ejemplo de una activity. Fuente: http://www.itcsolutions.eu/2011/08/31/android-tutorial how-to-create-and-display-anew-form-window-or-activity/. 38.
(39) Componentes de la pantalla de inicio (Widgets): Estos tipos de componentes son visuales y son usados principalmente en la Pantalla de inicio (HomeScreen) de Android para dar a conocer información que se actualiza habitualmente como, por ejemplo, un reloj, la previsión del tiempo, etcétera. (Ver Figura 4). Figura 4: Widgets en pantalla Android. Fuente: http://www.pcworld.com.mx/Articulos/24531.htm. Servicios (Services): Es aquel componente que se ejecuta en segundo plano y no está en constante uso, es decir, realiza operaciones cada cierto tiempo. Un servicio no brinda una interfaz gráfica al usuario. Por ejemplo, un servicio puede reproducir música en segundo plano mientras 39.
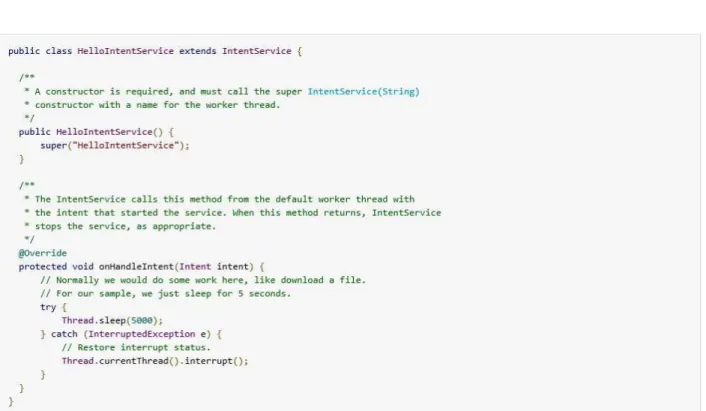
(40) el usuario está en otra aplicación, o puede obtener información de Internet sin la interacción del usuario. Un servicio es implementado a partir de la clase Java Service. En la Figura 5 podemos ver una clase de java que representa un servicio, esta clase de ejemplo al ser llamada por una actividad (Ver sección 7.4 - Actividades) esperará 5 segundos en segundo plano y luego se detendrá.. Figura 5: Ejemplo de código java que invoca un servicio. Fuente: https://developer.android.com/guide/components/services.html. 40.
(41) 10.5 Puente H. Según ( Torrente Artero , 2013), “Un puente H es un circuito electrónico que permite a un motor eléctrico DC girar en ambos sentidos, avance y retroceso”. Estos componentes electrónicos son usados ampliamente en el campo de la robótica como convertidores de potencia.. Figura 6: Estructura de un puente H, fuente :(Mancilla, Crespo, & Navarro, 2012, pág. 7). Los puentes H son utilizados en la construcción de una silla de ruedas automatizada para invertir el giro de un motor, pero a su vez puede usarse para frenarlos (de una manera brusca), al hacer un corto entre las bornes del motor, o hasta puede usarse para permitir que el motor frene bajo su propia inercia, es decir, cuando desconectamos el motor de la fuente de energía que lo alimenta. (Mancilla, Crespo, & Navarro, 2012).. 41.
(42) 10.5.1 Estructura de un Puente H. Figura 7: Estados básicos del puente h, fuente: (Mancilla, Crespo, & Navarro, 2012). Como se puede apreciar en la Figura 6, los interruptores S1-S3, nunca deberán ser cerrados al mismo tiempo, esto ocasionaría un cortocircuito en la fuente de tensión de entrada. Lo mismo, ocurre con los interruptores S2-S4. Este estado, se conoce con el término inglés “shootthrough”, algo así, como, “paso a través”. (Gia, 2014) Ver Figura 7 estado básicos del puente H.. Si los interruptores todos los interruptores (S1, S2, S3 y S4) están abiertos, el motor estará libre, por el contrario, si el motor está girando y queremos frenarlo o pararlo, la tensión inducida que se genera con la inercia, se debe derivar hacia un sistema llamado de frenado. En general, los cuatro elementos de conmutación se pueden activar y desactivar de forma independiente, aunque hay algunas restricciones evidentes, (Gia, 2014).. 42.
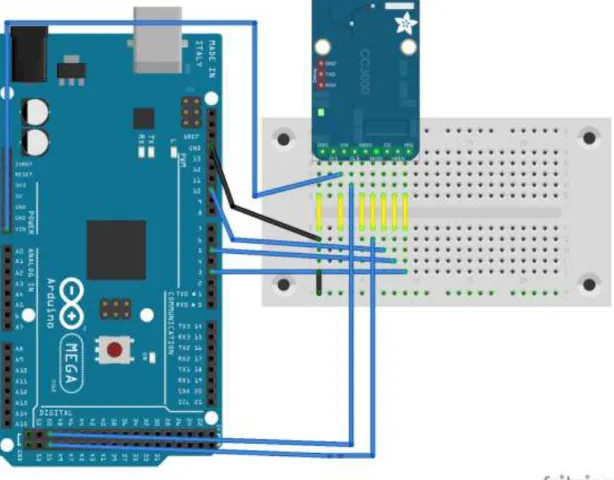
(43) 10.6 WIFI. Según (Aliance, s.f.) Una Red WiFi es la creación de una estructura de red implementando como base principal la utilización de tecnología inalámbrica WiFi (802.11a - 802.11b - 802.11g 802.11n) como forma para que los equipos se conecten entre sí y a internet. El uso más frecuente de esta tecnología es la conexión de portátiles a internet desde las cercanías de un punto de acceso. La emisión y recepción de datos se realiza a través de radiofrecuencia. Existen diferentes formatos de conexión, pero el más popular es el conocido como 802.11b, que opera en la banda de los 2,4 gigahertzios.. 10.7. Módulo CC3000. Según (Instruments, 2013) El módulo CC3000 es un procesador de red inalámbrica independiente que simplifica la implementación de la conectividad a Internet. El módulo CC3000 Wi-Fi simplifica el diseño y crea una mejor experiencia de usuario para aplicaciones tales como la automatización del hogar, electrodomésticos, energía inteligente, seguridad y salud y bienestar. Este módulo posee un regulador de 3.3V a bordo que pueda manejar la corriente máxima de 350 mA, y un cambiador de nivel para permitir nivel lógico 3 o 5V, este no posee una antena. En la sección 14.1.5 se puede apreciar cada pin y su funcionalidad. Es importante resaltar que Texas Instruments sacó al mercado dos nuevos microcontroladores, el microcontrolador CC3100 y el CC3200 para sustituir al microcontrolador CC3000. Por tal motivo actualmente, desde Texas Instruments no se recomienda el uso del microcontrolador CC3000, por presentación de problemas en su codificación y promueve la adquisición o migración hacia el microcontrolador CC3200 (adafruit, 2013). 43.
(44) 10.8 Odometría. Según (Borenstein & Feng, December 1996) Odometría es el método más utilizado para determinar la posición momentánea de un robot. En las aplicaciones más prácticas de odometría, ofrece fácil acceso al posicionamiento en tiempo real, La frecuencia a la que las medidas absolutas se deben llevar a cabo depende en gran medida de la precisión del sistema de odometría. En este orden de ideas se debe tener claro que la odometría es la información relativa que nos dice cuánto hemos avanzado, pero no en donde estamos. Si sabemos dónde empezamos, entonces podemos añadir el movimiento con relación a la posición inicial y obtener una estimación de nuestra posición actual. Odometría nos da una respuesta muy rápida, pero debido a errores acumulados, que está sujeta a la deriva. Se necesitarán otras técnicas para corregir la estimación de odometría periódicamente. Algunos de estas pueden corregir todos los ejes, y algunos pueden corregir uno o dos. Ahora bien, la odometría de un vehículo es directamente proporcional a la capacidad de su navegación, es decir, entre mejor sea su odometría mejor será capaz de navegar. (Holland, 2004).. 44.
(45) 11 Marco contextual. El proyecto se encuentra enfocado en la implementación de una aplicación móvil para controlar la silla de ruedas, por medio del panel táctil del celular, poder controlar también por voz, y predefinir una ruta la cual la silla recorrerá, destinada a usuarios con movimiento reducido con el fin de aumentar su calidad de vida. “Este tipo de dispositivos mejora gratamente la calidad de vida de las personas discapacitadas y en muchos casos puede permitir manejar una silla de ruedas a personas que de otra manera serían incapaces de realizarlo”. El software desarrollado para la silla de ruedas es capaz de conducir el sistema de movimiento en situaciones de difícil maniobrabilidad, las cuales son complicadas para personas con patologías relacionas con el Parkinson o movimientos espasmódicos, por ejemplo. (Alcubierre , y otros, 2005).. 45.
(46) 12 Metodología. 12.1 Área del conocimiento, área temática y tema. El área del conocimiento en el que se desarrolló el proyecto fue la de ingeniería de sistemas, el área temática fue; Desarrollo de software; El tema de investigación, fue la movilidad en la población con movimiento reducido.. 12.2 Título y área de investigación. El título del proyecto fue: Sistema de control con redes neuronales para silla de Ruedas asistida por comandos de voz, programación de ruta, manejada por Aplicación celular y con un sistema de carga mediante celdas solares Y abarco las áreas de investigación de: implementación de inteligencia artificial y programación en plataformas móviles.. 12.3 Tipo de investigación.. Las investigaciones pueden ser de diferentes tipos, bien sea de campo, de proyectos especiales, factibles o de tipo documental, todo esto según (Balestrini, 2002). La presente investigación es del tipo factible puesto que está en concordancia con los objetivos planteados y la finalidad con la 46.
(47) que se desarrolló el proyecto, es decir, se. un prototipo orientado a proporcionar una solución a. un problema planteado en un ambiente real. Este proyecto se apoyó en un diseño de campo, puesto que los datos requeridos para la investigación fueron obtenidos directamente de una silla de ruedas en funcionamiento.. Para alcanzar el éxito de los objetivos planteados, el desarrollo del proyecto se ha separado en. fases. según. la metodología de descomposición de trabajo WBS (Work Breakdown. Structure) y basando la constitución y desarrollo de las actividades en la gestión de proyectos, que es la disciplina que permite gestionar de manera organizada y administrar recursos de manera tal que se pueda alcanzar con exito los objetivos dentro del alcance, el tiempo y los costos definidos. En este orden de ideas y teniendo en cuenta lo expuesto por (Pereira Z. , 2011) el tipo de investigación es mixta porque recolecta, analiza y vincula datos cualitativos y cuantitativos en un solo proyecto de investigación.. 47.
(48) 12.4 Método de investigación. El proyecto se dividió en tres fases, la fase de búsqueda de información, la fase de implementación, y la fase generación de documentos, los cuales se describen en la Figura 8.. Proyecto. Fase. Acción. Generación de documentación Figura 8: Método de investigación Fuente: Propia. 48.
(49) 12.5 Fases de la investigación.. 12.5.1 Fase 1: Desarrollo del estado del arte En esta fase se investigó sobre proyectos relacionados con la silla de ruedas con movimientos autónomos, luego de tener una idea sólida, se plantearon puntos clave que sirvieron en la fase de creación de código, tales como, la plataforma móvil a trabajar (Android), y la comunicación con la silla de ruedas (Arduino). 12.5.2 Fase 2: Construcción e implementación de código En esta fase se consolidaron en documentos las fuentes de información, en base a estas se creó el posterior código que luego fue probado reiterativas veces en la silla de ruedas.. 12.5.3 Fase 3: Generación documento y manual. Cuando culmine la etapa práctica, se reunirá toda la información y material utilizados con la cual se redactará un documento que evidencia los pasos del desarrollo del proyecto, para dar a conocer a toda la comunidad interesada los resultados del trabajo realizado.. 49.
(50) 12.6 Técnicas e instrumentos metodológicos. 12.6.1 Técnicas 12.6.1.1 Fuente primaria Como primera instancia se contó con la información del proyecto anterior, Implementación de silla de ruedas guiada por señales electrooculograficas desarrollada por Jose Lozano Mendoza Jorge Núñez Jiménez, la cual proporciono las bases necesarias para proyección en el desarrollo de este proyecto. Revisión del manual de usuario de la silla de ruedas para comprender su funcionamiento y posterior planificación para la incorporación de los aplicativos de software.. 12.1.1.1 Fuente secundaria.. Se realizaron consultas en diversas fuentes como en la base de datos de la universidad cooperativa de Colombia, artículos, trabajos, tesis y trabajos de grado para profundizar y ampliar los conocimientos referentes a los distintos temas que se abordaron a lo largo del desarrollo de este proyecto, también se reforzaron conocimientos en Arduino (Arduino, 2014) y Android Studio (Robledo Fernández, 2000) ya que no se presentó antes la oportunidad de manejar este tipo de tecnología, la cual fue muy útil, dada su sencillez de uso.. 12.1.1.2 Instrumentos. La silla de ruedas utilizada en el proyecto de investigación anterior, lo que nos facilitó el trabajo, ya que teníamos una base sólida muy cerca de nuestra comunidad, los elementos usados fueron:. 50.
(51) 1 Arduino Mega 2560 muy fácil de programar, un módulo adaptable a Arduino Mega 2560, el CC3000 darle conectividad wifi a la silla de ruedas.. 12.7 Planificación. 1. Análisis del tema 2. Dar un orden de prioridad a las actividades (cual se realiza primero) 3. Recopilación de la información. 4. Análisis de la información y planteamiento del problema. 5. Planteamiento de soluciones al problema. 6. Selección de materiales. 7. Diseño, construcción e implementación del proyecto. 8. Entrega de resultados.. 12.8 Recursos Humanos. El laboratorio de la Universidad Cooperativa de Colombia, que nos brindó el espacio para trabajar.. 51.
(52) 12.9 Cronograma de actividades. Aplicación Android para silla de ruedas, que permita controlarla por comandos de voz, pantalla táctil y programación de ruta. Objetivo. Actividad. Tarea. Meses 1 2. Investigar. Buscar. Los. documentos. diferentes. relacionado. sistemas. s con sillas. operativos. de ruedas. de. automatizad. dispositivos. as. móviles. controlados. 3 4 5 6 7 8 9 10. 11. 12. Desarrollo de aplicación celular para maniobrar la silla de ruedas por manejo del panel táctil del celular. por dispositivos móviles Estudiar los datos encontrados Diseñar un. Recopilar. 52. 13.
(53) prototipo. los datos y diseñar un prototipo de software adecuado. Construir el. Crear a. aplicativo. partir del. móvil. modelo la aplicación que se conecta con la silla de ruedas. Incorporación de. Acoplar al. Acoplar la. un sistema de. aplicativo. investigació. manejo de la silla. móvil. n de. por comandos de. comandos. voz.. de voz en dispositivos móviles con la. 53.
(54) aplicación final. Programación de ruta en entorno. Acoplar al. Acoplar lo. aplicativo. investigado. móvil. en creación de rutas. definido para la. predetermin. silla.. adas En la aplicación principal. Diseño de un sistema de control con redes neuronales.. Diseñar un. Investigar. prototipo de. sobre redes. control con. neuronales. una red. para el. neuronal. control de las silla de ruedas. 54.
(55) Acoplar los datos investigados en la aplicación principal. 55.
(56) 13 Delimitaciones del proyecto. 13.1 Delimitación del problema. Este proyecto está orientado al desarrollo de un sistema de control mediante dispositivos móviles, que permiten manipular la silla de ruedas desde cualquier parte que tenga acceso a la red de la silla, la silla de ruedas se puede adaptar a diferentes tipos de control y con diferentes métodos de acceso y comunicación con ella, todo esto se hizo sin quitarle merito a los métodos de control comunes, como lo puede ser el clásico joystick (palanca de manejo) que en el entorno real sería mucho más práctico.. 13.2 Delimitaciones del espacio. Este proyecto fue ejecutado en la costa caribe Colombiana, en el departamento de Magdalena, específicamente en la ciudad de Santa Marta, su planeación, creación, implementación, pruebas y designación de trabajos se llevaron a cabo en las instalaciones del laboratorio de electrónica de la Universidad Cooperativa de Colombia.. 56.
(57) 13.3 Delimitaciones del tiempo.. Para el proceso de recolección de información, y todo lo relacionado con el desarrollo del proyecto, imprevistos y su sustentación, se programaron 12 meses a partir del 1ro de Julio del año 2015, dado el esfuerzo dedicado al proyecto, se espera finalice Antes de que se culmine el tiempo.. 57.
(58) 14 Descripción del sistema. 14.1 Diagramas del sistema. 14.1.1 Diagrama de envío de datos. Figura 9: Diagrama de envió de datos desde el aplicativo Android. Fuente: Propia. 58.
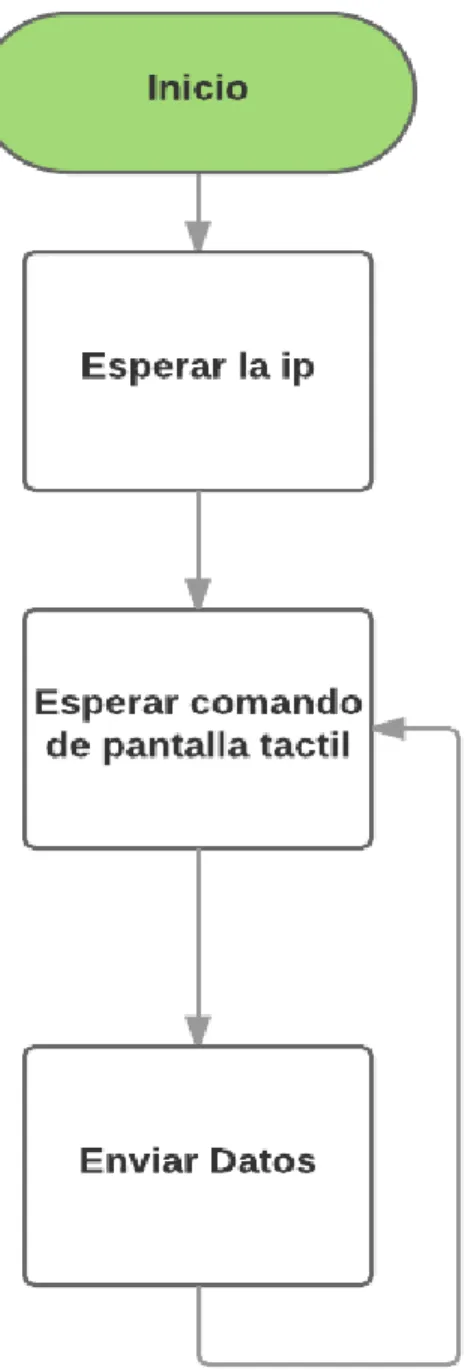
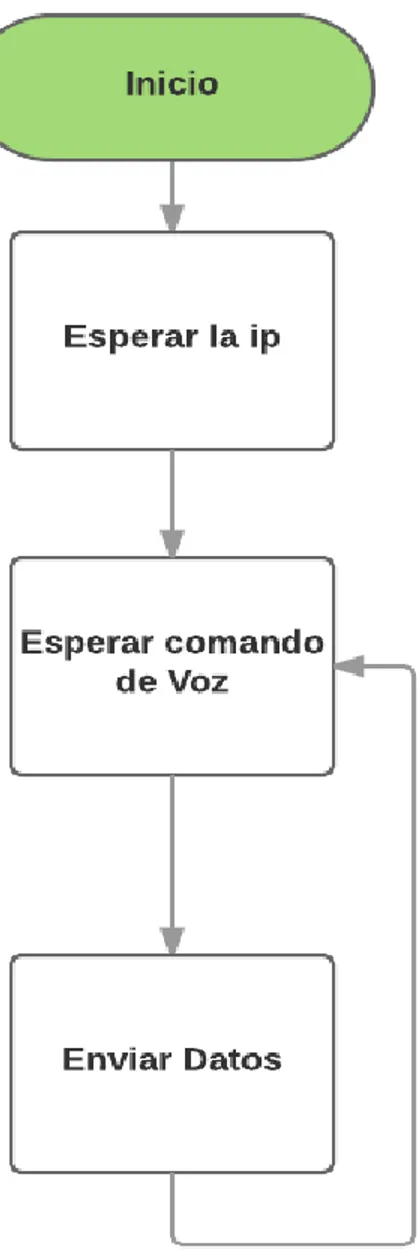
(59) La Figura 9 describe el proceso completo de envío de datos desde el aplicativo móvil, Para generar movimiento en la silla de ruedas. El aplicativo cuenta con tres distintas formas de enviar datos a la silla de ruedas por medio del aplicativo, el envío de datos capturados por la pantalla táctil, esta captura los movimientos realizados en la pantalla, mover hacia arriba envía el comando “adelante” mover hacia abajo envía el comando “abajo”, mover hacia la derecha, envía “derecha”, mover hacia la izquierda, envía “izquierda”, y soltar la pantalla, envía “detener”. Él envió de comandos por voz, recibe las palabras anteriores y envía el comando especificado para ellos, “adelante, abajo, izquierda, derecha, detener”, Él envió de ruta definida nos permite dibujar en la pantalla, lo cual hace que la silla de ruedas se mueva igual a como se le indique en el aplicativo.. 59.
(60) Figura 10: Envío de datos por ruta definida. Fuente: propia. En la Figura 10, el diagrama de envió de datos por ruta, muestra como la aplicación procesa la información y la envía en el seccional de ruta definida, el programa espera a que el usuario digite la IP a la cual va a enviar los datos, (la cual debe ser la IP del módulo cc300), luego, espera a que el usuario dibuje los 4 trazos permitidos y procede a enviar estos a la silla. 60.
(61) Figura 11: Envío de datos por pantalla táctil. Fuente: Propia. En la Figura 11, el diagrama de envió de datos por pantalla táctil, muestra como la aplicación procesa la información y la envía en el seccional de táctil, el programa espera a que el usuario digite la IP a la cual va a enviar los datos, (la cual debe ser la IP del módulo cc300), luego, espera. 61.
Figure

+7


Outline
Documento similar
En cuarto lugar, se establecen unos medios para la actuación de re- fuerzo de la Cohesión (conducción y coordinación de las políticas eco- nómicas nacionales, políticas y acciones
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
