Equipos de ultrasonido Hiscan y Cinescan
86
0
0
Texto completo
(2) Equipos de ultrasonido Hiscan y Cinescan. Exergo. “Nuestro deber es lo que reclama el día de hoy”. Goethe.
(3) Equipos de ultrasonido Hiscan y Cinescan. Agradecimientos. Nuestro más sincero agradecimiento primeramente a nuestros familiares y amigos, sin cuyo apoyo, comprensión y amor no hubiésemos emprendido y culminado nuestros estudios. Agradecemos también a todos los profesores y compañeros de trabajo que con su experiencia profesional han contribuido a nuestra formación como ingenieros revolucionarios. A nuestra tutora Ing. Karenly Borges Pérez, a nuestro asesor Dr. Juan José Llovera González, al Ing. Pavel González García y a Alexis Marcané Izquierdo, Jefe del Departamento de Electromedicina del Hospital Oftalmológico Ramón Pando Ferrer por su dedicación y contribución en la elaboración de esta tesis de grado. A nuestros compañeros de estudio, con los cuales compartimos el aula, los conocimientos y parte de nuestra vida en estos 6 años de formación profesional.. Muchas Gracias..
(4) Equipos de ultrasonido Hiscan y Cinescan. Dedicatoria. Le dedicamos esta tesis a nuestros seres más queridos, a quienes les debemos todos nuestros sueños y anhelos, a quienes nos alientan con su espíritu y su ejemplo..
(5) Equipos de ultrasonido Hiscan y Cinescan. RESUMEN. El presente trabajo consiste en el estudio de dos equipos médicos que utilizan técnicas de ultrasonido, estos son utilizados en el diagnóstico de enfermedades oftalmológicas. Los equipos son el Cinescan de Quantel Medical SA y el Hiscan de Optikon Co. El objetivo de esta investigación es conocer las características y potencialidades de los equipos de este tipo que se encuentran instalados y en explotación en los centros oftalmológicos del país. El trabajo se dividió en 3 capítulos, en el primero se hace una introducción al Ultrasonido como fenómeno físico y las aplicaciones técnicas del mismo. En los capítulos 2 y 3 se estudian los equipos Cinescan e HiScan respectivamente y en el capítulo 4 se abordan los requerimientos médicos y la organización de un servicio de oftalmología. Como resultado de este trabajo tenemos que se logró estudiar desde el punto de vista técnico los equipos antes mencionados, sus características y potencialidades. Además se determinó que conocimientos debe poseer el personal médico para explotar al máximo las potencialidades de esta tecnología. Por todo lo anterior se concluye que esta tesis contribuye en cierta medida a brindar un servicio oftalmológico de excelencia..
(6) Equipos de ultrasonido Hiscan y Cinescan. Índice INTRODUCCIÓN .......................................................................................................... 1 CAPÍTULO 1. BREVE INTRODUCCIÓN AL ULTRASONIDO............................ 3 1.1 HISTORIA DEL ULTRASONIDO ................................................................................... 3 1.2 BASES FÍSICAS DEL ULTRASONIDO ........................................................................... 6 1.3 PRINCIPIO DE FUNCIONAMIENTO DE UN EQUIPO DE ULTRASONIDO ........................... 8 1.3.1 El transductor .................................................................................................. 8 1.3.2 Estructura del transductor .............................................................................. 9 1.3.3 El transductor actúa como emisor y receptor:.............................................. 10 1.3.4 Arreglos de transductores ............................................................................ 12 1.3.5 Tipos de barridos.......................................................................................... 12 1.3.6 Focalización y Deflexión............................................................................... 12 1.3.7 Formación de imagen por ultrasonido. Principio Pulso –Eco .................... 13 1.3.8 Velocidad de barrido .................................................................................... 13 1.3.9 Modos de visualización ................................................................................ 13 1.4 PARTES QUE COMPONEN UN SISTEMA DE ULTRASONIDO CON FINES MÉDICOS ........ 14 1.4.1 Principio básico de funcionamiento de un ultrasonido con fines médicos ... 15 1.5 APLICACIONES DEL ULTRASONIDO EN LA MEDICINA .............................................. 15 1.6 PRINCIPALES BENEFICIOS DEL ULTRASONIDO ........................................................ 18 CAPÍTULO 2: EQUIPO ULTRASONIDO CINESCAN ......................................... 19 2.1 USO ESPECÍFICO ..................................................................................................... 19 2.2 CARACTERÍSTICAS TÉCNICAS FUNDAMENTALES .................................................... 19 2.2.1 Configuración básica .................................................................................... 19 En la figura del anexo # 1se puede ver el equipo Cinescan y sus componentes básicos. ................................................................................................................... 20 2.2.2 Características del Hardware ....................................................................... 20 2.2.3 Características del Software ......................................................................... 28 2.3 PRINCIPIOS FÍSICOS DE FUNCIONAMIENTO.............................................................. 32 2.4 FORTALEZAS, FACILIDADES Y DEBILIDADES DEL EQUIPO ....................................... 32 2.4.1 Fortalezas y potencialidades del Cinescan .................................................. 32 2.4.2 Actualizaciones y mejoras ............................................................................. 37 2.4.3 Facilidades del Cinescan ............................................................................. 38 2.4.4 Principales debilidades del Cinescan ........................................................... 40 2.5 FALLOS MÁS FRECUENTES. REPUESTOS MÁS NECESARIOS ..................................... 40 2.6 EXIGENCIAS DEL LOCAL DONDE SE INSTALE EL EQUIPAMIENTO ............................. 41 2.7 MANTENIMIENTO TÉCNICO ................................................................................... 44 2.8 MANTENIMIENTO Y LIMPIEZA DE LOS SENSORES PARA EVITAR EL TRASPASO DE ENFERMEDADES CONTAGIOSAS .................................................................................... 46 CAPÍTULO 3. EQUIPO ULTRASONIDO HISCAN ............................................... 48 3.1 USO ESPECÍFICO ..................................................................................................... 48 3.2 PRINCIPIOS FÍSICOS DE FUNCIONAMIENTO.............................................................. 48 3.3 DESCRIPCIÓN DEL SISTEMA .................................................................................... 48 3.4 CARACTERÍSTICAS TÉCNICAS ................................................................................. 49 3.5 TRABAJO CON EL EQUIPO ....................................................................................... 52 3.5.1 Comandos del panel frontal .......................................................................... 52.
(7) Equipos de ultrasonido Hiscan y Cinescan. 3.5.2 Interfaz gráfica de usuario ............................................................................ 54 3.5.3 Software de imagen 3D.................................................................................. 55 CAPÍTULO 4. REQUERIMIENTOS MÉDICOS .................................................... 59 4.1¿QUE DEBEN SABER LOS MÉDICOS SOBRE LOS EQUIPOS EN CUESTIÓN? ................... 59 4.2 ORGANIZACIÓN DEL SERVICIO OFTALMOLÓGICO .................................................. 60 CONCLUSIONES ........................................................................................................ 66 RECOMENDACIONES .............................................................................................. 67 REFERENCIAS BIBLIOGRÁFICAS ....................................................................... 68 BIBLIOGRAFÍA .......................................................................................................... 69 GLOSARIO DE TÉRMINOS ..................................................................................... 70 ANEXOS ......................................................................................................................... 1.
(8) Equipos de ultrasonido Hiscan y Cinescan. Introducción El ultrasonido diagnóstico o sonografía, conocido popularmente como ultrasonido, ha tenido una evolución muy rápida gracias a su inocuidad, facilitando la posibilidad de practicar numerosos estudios en un mismo paciente, sin riegos, sin preparaciones dispendiosas y a un costo relativamente bajo. Su nombre sonografía, proviene del inglés sonography, y a los médicos que la ejercen se les denomina sonólogos, del inglés sonologist. Un avance científico que ha impulsado radicalmente el desarrollo de la medicina ha sido la informática. Gracias a los nuevos computadores ha sido posible obtener significativas mejoras en los equipos, como es el ultrasonido en color, las imágenes tridimensionales, la telesonografía, etc. También los equipos son cada vez más pequeños y livianos y permiten sondas que pueden penetrar incluso vasos de pequeño calibre. Además, ya son totalmente digitales con imágenes mucho más nítidas. Todos estos progresos han convertido al ultrasonido en una rama de la medicina con carácter multidisciplinario, que requiere en muchos casos una especialización en ciertas áreas. Técnicas como la exploración transvaginal han cambiado totalmente la concepción del ultrasonido. Nuevos estudios como la urosonografía hacen innecesaria la práctica de exámenes peligrosos y complicados como la urografía excretora. Así mismo la sonomamografía hace innecesaria la mamografía, el ultrasonido de tiroides desplaza a la gamagrafía y así encontraremos otros muchos ejemplos. En este trabajo se pretende hacer una introducción al tema de los ultrasonidos en general y más específicamente estudiar las características y potencialidades de dos equipos médicos que juegan un importante rol en el diagnóstico de enfermedades oftalmológicas así como el cálculo de parámetros de los tejidos del ojo humano (córnea, cristalino, vítreo y retina). Los equipos son el Cinescan de Quantel Medical SA y el Hiscan de Optikon Co. Los equipos antes mencionados están en explotación en los centros oftalmológicos que prestan sus servicios a los pacientes del programa Misión Milagro, auspiciado por. 1.
(9) Equipos de ultrasonido Hiscan y Cinescan. Cuba y Venezuela, mediante el cual se han tratado 200 000 personas afectadas de ceguera y otros tipos de deficiencia visual. Con este estudio se pretende alcanzar los siguientes objetivos: 1. Hacer una introducción a los ultrasonidos en general, historia, bases físicas y principio de funcionamiento. 2. Estudio de las características y potencialidades de los equipos ultrasonidos Cinescan e Hiscan. 3. Determinación del uso específico de estos equipos en los centros oftalmológicos del país. 4. Determinación del conocimiento que acerca de esta tecnología deben poseer los médicos para lograr brindar un servicio oftalmológico de excelencia. Para alcanzar estos objetivos se realizan las siguientes acciones: 1. Búsqueda en Internet de información sobre todo lo relacionado al tema de los ultrasonidos. 2. Trabajo con los Manuales de usuario y servicio de los equipos ultrasonidos Cinescan e Hiscan. 3. Visita a un centro de oftalmología, intercambio de conocimientos con el personal médico que trabaja con los equipos. 4. Calibración de los equipos ultrasonidos, realización de pruebas de campo para comprobar los parámetros que brinda el fabricante. Trabajo en colaboración con el personal de electromedicina del centro oftalmológico visitado.. 2.
(10) Equipos de ultrasonido Hiscan y Cinescan. Capítulo 1. Breve introducción al ultrasonido Los ultrasonidos son aquellas ondas sonoras cuya frecuencia es superior al margen de audición humano, es decir, 20 Khz. aproximadamente. Las frecuencias utilizadas en la práctica pueden llegar, incluso, a los giga hertzios. En cuanto a las longitudes de onda, éstas son del orden de centímetros para frecuencias bajas y del orden de micras para altas frecuencias.. 1.1 Historia del ultrasonido En la naturaleza encontramos desde tiempos inmemoriales animales que utilizan el ultrasonido como medio de orientación, comunicación, localización de alimentos, defensa, etc. Ejemplos de animales que utilizan el ultrasonido son: polillas, mariposas, pájaros, perros, murciélagos y delfines. A continuación haremos una reseña histórica de los principales acontecimientos que han marcado el progreso del ultrasonido en el campo médico: •. En 1881, Jacques y Pierre Curie publicaron los resultados obtenidos al experimentar la aplicación de un campo eléctrico alternante sobre cristales de cuarzo y turmalina, los cuales produjeron ondas sonoras de muy altas frecuencias.. •. En el año 1883, Galton investigó los límites de la audición humana, fijando la frecuencia máxima a la que podía oír una persona. Llegó a la conclusión de que los sonidos con frecuencias inaudibles por el ser humano, presentaban fenómenos de propagación similares al resto de las ondas sonoras, aunque con una absorción mucho mayor por parte del aire.. •. En 1912, abril, poco después del hundimiento del Titanic, L. F. Richardson, sugirió la utilización de ecos ultrasónicos para detectar objetos sumergidos.. •. En 1917, Paul Langevin y Chilowsky produjeron el primer generador piezoeléctrico de ultrasonido, cuyo cristal servía también como receptor, y generaba cambios eléctricos al recibir vibraciones mecánicas. El aparato fue utilizado para estudiar el fondo marino, como una sonda ultrasónica para medir profundidad.. 3.
(11) Equipos de ultrasonido Hiscan y Cinescan. •. En 1929, Sergei Sokolov, científico ruso, propuso el uso del ultrasonido para detectar grietas en metal, y también para microscopía.. •. En 1940, Firestone desarrolló un reflectoscopio que producía pulsos cortos de energía que se detectaba al ser reflejada en grietas y fracturas.. •. En 1942, Karl Dussik, psiquiatra trabajando en Austria, intentó detectar tumores cerebrales registrando el paso del haz sónico a través del cráneo. Trató de identificar los ventrículos midiendo la atenuación del ultrasonido a través del cráneo, lo que denominó "Hiperfonografía del cerebro".. •. En 1947, Dr Douglas Howry, detectó estructuras de tejidos suaves al examinar los reflejos producidos por el ultrasonidos en diferentes interfases.. •. En 1949 se publicó una técnica de eco pulsado para detectar cálculos y cuerpo extraños intracorpóreos.. •. En 1952, Howry y Bliss publicaron imágenes bidimensionales del antebrazo, en vivo.. •. En 1952, Wild y Reid publicaron imágenes bidimensionales de Carcinoma de seno, de un tumor muscular y del riñón normal. Posteriormente estudiaron las paredes del sigmoide mediante un transductor colocado a través de un rectosigmoideoscopio y también sugirieron la evaluación del carcinoma gástrico por medio de un transductor colocado en la cavidad gástrica.. •. En. 1953,. Leksell,. usando. un. reflectoscopio. Siemens,. detecta. el. desplazamiento del eco de la línea media del cráneo en un niño de 16 meses. La cirugía confirmó que este desplazamiento era causado por un tumor. El trabajo fue publicado sólo hasta 1956. Desde entonces se inició el uso de ecoencefalografía con M-MODE. •. En 1954, Ian Donald hizo investigaciones con un detector de grietas, en aplicaciones ginecológicas.. •. En 1956, Wild y Reid publicaron 77 casos de anormalidades de seno palpables y estudiadas además por ultrasonido, y obtuvieron un 90% de certeza en la diferenciación entre lesiones quísticas y sólidas.. •. En 1957, Tom Brown, ingeniero, y el Dr. Donald, construyeron un scanner de contacto bidimensional, evitando así la técnica de inmersión. Tomaron fotos con película Polaroid y publicaron el estudio en 1958.. •. En 1957, el Dr Donald inició los estudios obstétricos a partir de los ecos provenientes del cráneo fetal. En ese entonces se desarrollaron los cálipers (cursores electrónicos). 4.
(12) Equipos de ultrasonido Hiscan y Cinescan. •. En 1959, Satomura reportó el uso, por primera vez, del Doppler ultrasónico en la evaluación del flujo de las arterias periféricas.. •. En 1960, Howry introdujo el uso del Transductor Sectorial Mecánico (hand held scanner).. •. En 1962, Homes produjo un scanner que oscilaba 5 veces por segundo sobre la piel del paciente, permitiendo una imagen rudimentaria en tiempo real.. •. En 1963, un grupo de urólogos japoneses reportó exámenes ultrasónicos de la próstata, en el A-MODE.. •. En 1964 apareció la técnica Doppler para estudiar las carótidas, con gran aplicación en Neurología.. •. En 1965 la firma austriaca Kretztechnik en asociación con el oftalmólogo Dr Werner Buschmann, fabricó un transductor de 10 elementos dispuestos en fase, para examinar el ojo, sus arterias, etc.. •. En 1966, Kichuchi introdujo la "Ultrasonocardiotomografía sincronizada", usada para obtener estudios en 9 diferentes fases del ciclo cardiaco, usando un transductor rotatorio y una almohada de agua.. •. En 1967, se inicia el desarrollo de transductores de A-MODE para detectar el corazón embrionario, factible en ese entonces a los 32 días de la fertilización.. •. En 1968, Sommer reportó el desarrollo de un scanner electrónico con 21 cristales de 1.2 MHz, que producía 30 imágenes por segundo y que fue realmente el primer aparato en reproducir imágenes de tiempo real, con resolución aceptable.. •. En. 1969. se. desarrollaron. los. primeros. transductores. transvaginales. bidimensionales, que rotaban 360 grados y fueron usados por Kratochwil para evaluar la desproporción cefalopélvica. También se inició el uso de las sondas transrectales. •. En 1970 Kratochwill comenzó la utilización del ultrasonido transrectal para valorar la próstata.. •. En 1971 la introducción de la escala de grises marcó el comienzo de la creciente aceptación mundial del ultrasonido en diagnóstico clínico.. •. 1977 Kratochwil combinó el ultrasonido y la laparoscopía, introduciendo un transductor de 4.0 MHz a través del laparoscopio, con el objeto de medir los folículos mediante el A-MODE. La técnica se extendió hasta examinar vesícula, hígado y páncreas.. •. En 1982 Aloka anunció el desarrollo del Doppler a color en imagen bidimensional.. 5.
(13) Equipos de ultrasonido Hiscan y Cinescan. •. En 1983, Lutz uso la combinación de gastroscopio y ultrasonido, para detectar CA gástrico y para el examen de hígado y páncreas.. •. En 1983, Aloka introdujo al mercado el primer equipo de Doppler a color que permitió visualizar en tiempo real y a color el flujo sanguíneo.. •. En 1994, el Dr. Gonzalo E. Díaz introdujo el postproceso a color para imágenes diagnósticas ultrasonográficas, pudiéndose extender a cualquier imagen.. En la actualidad las técnicas de ultrasonido han alcanzado un elevado nivel de desarrollo. Con la incorporación de transductores eléctricos de tiempo real, multifrecuenciales, adaptados al estudio de diferentes órganos y la creación de múltiples rutinas C.A.D. (Computer Aided Diagnosis o diagnóstico apoyado por computadora) se han obtenido notorios beneficios en la precisión del diagnóstico médico.. 1.2 Bases físicas del ultrasonido Para comprender el ultrasonido debemos comprender el concepto de sonido: Sonido es la sensación producida en nuestro aparato auditivo por una onda longitudinal originada por la vibración de un cuerpo elástico y propagada a través de un medio material. Estas ondas solamente pueden atravesar materia, es decir, son vibraciones que se transmiten de un punto a otro y no se propagan en el vacío como las ondas electromagnéticas. El ultrasonido podría entonces definirse como un tren de ondas mecánicas, generalmente longitudinales, originadas por la vibración de un cuerpo elástico y propagadas por un medio material y cuya frecuencia supera la del sonido audible por el genero humano: 20 000 ciclos/s (20 KHz) aproximadamente. Estas ondas sonoras corresponden básicamente a la rarefacción y compresión periódica del medio en el cual se desplazan como vemos en la gráfica siguiente:. 6.
(14) Equipos de ultrasonido Hiscan y Cinescan. Figura 1. Una onda de sonido se produce en un medio donde se pueden crear zonas de comprensión y de rarefacción, en el vacío no se propaga el sonido. Las ondas se caracterizan por su longitud de onda y su periodo.. Al igual que existe un espectro de ondas electromagnéticas, dentro del cual la luz visible ocupa una mínima porción existe un espectro de vibraciones acústicas, en el cual la gama de frecuencias audibles ocupa un mínimo porcentaje.. Figura 2. Rango de frecuencia de los ultrasonidos. En contraste, otros medios diagnósticos por imágenes utilizan ondas que corresponden al espectro electromagnético como son la gamagrafía y la radiología convencional, por acción directa de los fotones que impresionan el material sensible y. 7.
(15) Equipos de ultrasonido Hiscan y Cinescan. la Resonancia magnética nuclear que utiliza el efecto producido por ondas de radio sobre los átomos de hidrógeno alineados por medio de un campo magnético.. 1.3 Principio de funcionamiento de un equipo de ultrasonido Se utiliza la técnica del eco pulsado: pulsar un cristal y enviar paquetes de energía dentro del paciente. Un pequeño porcentaje es reflejado en las diferentes interfases y llega al transductor el cual la traduce a un pequeño voltaje. El mayor porcentaje de energía atraviesa las diversas interfases y penetra a regiones mas profundas. Las interfaces son los límites entre medios de diferentes impedancias. Impedancia (Z) es igual al producto de la densidad de un medio por la velocidad del sonido en dicho medio: Z=V*D 1.3.1 El transductor El transductor ultrasónico basa su funcionamiento en la propiedad que tienen algunos materiales de deformarse ante una excitación eléctrica y viceversa, produciendo una acumulación de cargas ante una deformación, a esto se le llama piezoelectricidad. Por tanto un transductor ultrasónico conecta al mundo mecánico con el eléctrico. El transductor es el componente más crítico del sistema y está compuesto por 3 estructuras básicas: contramasa, material piezoeléctrico y lámina de acoplamiento, como se muestra en la figura 3.. Capa de acoplamiento. Material piezoeléctrico. Contra-masa. Figura 3. Estructura básica del transductor ultrasónico. 8.
(16) Equipos de ultrasonido Hiscan y Cinescan. 1.3.2 Estructura del transductor Lamina piezoeléctrica La lamina piezoeléctrica cumple con el efecto piezoeléctrico el cual no es mas que la propiedad de algunas sustancias que al recibir oscilaciones mecánicas produce oscilaciones eléctricas o viceversa definiéndose como: - Directo: Cuando el material se excitado eléctricamente se deforma. - Inverso: Cuando el material se deforma aparece una respuesta eléctrica. Uno de los materiales piezoeléctricos más usado para la generación de imágenes médicas es el Titanato de circonio (PZT 5A) Existen tres modos de vibración para estos materiales piezoeléctricos los cuales son: 1. Modo de flexión 2. Modo radial 3. Modo de espesor Los dispositivos para la visualización de imágenes médicas trabajan regularmente en modo espesor. Eso quiere decir que la vibración de la cerámica piezoeléctrica ocurre en la misma dirección de la polarización. Unos de los problemas fundamentales de las cerámicas piezoeléctricas es su alta impedancia acústica. Lamina de acoplamiento (c capa frontal) La capa o lámina (capa frontal) de acoplamiento protege la cerámica Piezoeléctrica. Permite un mejor acople acústico entre la cerámica piezoeléctrica y el cuerpo humano. Contramasa (backing) La contramasa (backing) permite que los pulsos que entren a esta capa no recrezcan al material piezoeléctrico. Para lograr esto se utiliza un polímero con partículas de un material sólido, que se comporta como un hueco negro para las ondas ultrasónicas. Esto permite que los pulsos sean más pequeños garantizando así la poca duración de estos.. 9.
(17) Equipos de ultrasonido Hiscan y Cinescan. 1.3.3 El transductor actúa como emisor y receptor: Efecto piezoeléctrico, (modo receptor) tiene efecto cuando una presión comprime la superficie del cristal en el transductor y lo hace liberar un voltaje en su superficie. Efecto piezoeléctrico inverso, (modo emisor) ocurre cuando se aplica un voltaje a la superficie del cristal del transductor, produciendo una expansión del cristal. La intensidad del pulso de corriente eléctrica que actúa sobre el cristal es de 1 a 300 v aprox. y dura menos de 1.0 ms, que es el tiempo necesario para emitir el equivalente a 2 - 3 longitudes de onda, lo que equivale a 5-6 µs aproximadamente, quedando en silencio el tiempo suficiente para recibir los ecos superficiales así como lo provenientes de tejidos profundos para seguidamente emitir el siguiente pulso. La mayoría de equipos de ultrasonido emiten entre 500 y 3000 pulsos/s, con un promedio de 1000/s, lo cual se conoce como frecuencia del pulso de recepción. Un pulso ultrasónico está formado por tres componentes o fases: fase emisora, fase de equilibrio y fase receptora. La fase emisora corresponde a la utilizada para la generación del haz acústico; la fase receptora corresponde a la usada para la recepción de los ecos provenientes de las interfases, tanto de las superficiales y medias, como profundas; y la fase de equilibrio corresponde al tiempo del pulso durante el cual no hay emisión ni recepción de ondas sonoras (cristal en equilibrio). En un transductor que actúa con una frecuencia de 1000 pulsos/s, la duración de cada pulso ultrasónico será de 1 ms, en el cual, como ya vimos, la fase emisora durará 5-6 µs. El tiempo restante: 994 µs, o sea 99.4% del tiempo queda para las fases de equilibrio y receptora. La mayoría de ecógrafos tienen una profundidad de exploración máxima promedio de 20 cm. Como la velocidad del sonido en los tejidos es de aprox. 1540 m/s, el tiempo empleado desde la emisión del haz ultrasónico hasta la recepción de los ecos provenientes de las interfases más profundas será: 40 cm / 154.000 cm/s = 0.26 ms. Como el pulso (fase emisora + fase de equilibrio + fase receptora) dura 1 ms, el 26% de ese tiempo es utilizado en recibir ecos.. 10.
(18) Equipos de ultrasonido Hiscan y Cinescan. La onda reflejada al nivel de la primera interfase significativa, la cual podemos considerar establecida al nivel de la superficie externa del transductor, recorrerá solamente 1.0 cm de ida y vuelta, demorando en ello 6.5 µs. La fase de equilibrio durará 0.734 ms o sea 73.4 % del tiempo. Tenemos entonces que: Pulso ultrasónico (1 ms) = Emisión (0.006 ms) + Recepción (0.26 ms) + Equilibrio (0.734 ms). Las fases de equilibrio separan en el tiempo las fases activas y permiten el procesamiento de los ecos sin interferencias de los pulsos precedentes y siguientes. Como el tiempo empleado en el recorrido de las ondas depende de la velocidad del sonido, cuando existen grandes diferencias en las propiedades acústicas de los tejidos, por ejemplo al pasar de líquido a sólido, la relación tiempo distancia deja de ser lineal y se producen alteraciones en las medidas.. Figura 4. Producción de ondas sonoras, (a) usando un cristal de cuarzo alimentado con corriente alterna; (b) el cristal montado en un sostén produce un haz ultrasónico, se puede producir un haz enfocado usando lentes acústicas.. 11.
(19) Equipos de ultrasonido Hiscan y Cinescan. 1.3.4 Arreglos de transductores Para la obtención de una imagen se necesita realizar un arreglo de transductores. Un arreglo ultrasónico esta formado por un conjunto de elementos colocados según una estructura determinada que puede ser lineal, anular, bidimensional y anular-sectorial y que pueden ser controlados mayormente con medios electrónicos. Sobre este arreglo se realiza un barrido que puede ser mecánico o electrónico activando sectores en secuencia. Estos arreglos permiten generar imágenes 2D y/o 3D sin necesidad de mover el transductor realizando barridos lineales y sectoriales 1.3.5 Tipos de barridos Barrido lineal: Consiste en desplazar electrónicamente la apertura en un arreglo que contenga un gran número de elementos. Sus características principales son: •. No realiza la deflexión del haz. •. Pocos elementos activos. •. Adquisición en coordenadas cartesianas. •. Electrónica más simple. Su inconveniente es la anchura de la imagen y el tamaño de la apertura. Barrido sectorial: Consiste en cambiar los retardos que se aplican a cada elemento de la apertura con lo que se puede controlar el ángulo de deflexión del haz emitido por el arreglo. Sus características son: •. Realizan la deflexión del haz. •. Muchos elementos activos. •. Adquisición en coordenadas polares. •. Cubren mayor área con menor apertura. Su inconveniente es la complejidad electrónica que requieren. 1.3.6 Focalización y Deflexión Las características del campo ultrasónico producido por un transductor o arreglo de transductores, determinan su posible aplicación. Los elementos de un arreglo pueden ser individualmente controlados con el fin de producir ciertos efectos sobre las. 12.
(20) Equipos de ultrasonido Hiscan y Cinescan. propiedades del haz ultrasónico. Estos efectos son la focalización y la deflexión del mismo. La primera se basa en compensar los retardos, las diferencias de tiempos de propagación desde cada elemento al foco y la segunda, es la focalización del haz fuera del eje principal. 1.3.7 Formación de imagen por ultrasonido. Principio Pulso –Eco En los equipos ultrasónicos se emplea el principio de pulso-eco, donde un pulso ultrasónico de gran magnitud y corta duración (banda ancha) es transmitido y éste interactúa por los tejidos a lo largo de su paso generando una serie de ecos que retornan al transductor. En la generación de imágenes por ultrasonido se emite una señal eléctrica que es adquirida por un conjunto de buffers. y pasadas al transductor donde se hace la. conversión a una onda mecánica esférica que incide sobre la piel, una parte se refleja (primer eco) y la otra sigue hasta penetrar en el órgano estudiado produciéndose una segunda onda reflejada (segundo eco). Ambos ecos son convertidos a pulsos eléctricos en el transductor, pasan por los convertidores A/D donde se digitalizan y se muestran en pantalla obteniéndose la imagen deseada en el modo en que se configure la visualización. 1.3.8 Velocidad de barrido Indica la velocidad a la que se están generando las imágenes. Los sistemas de imágenes más antiguos usaban un único elemento que se mueve a lo largo de la superficie de interés, por lo que la velocidad de barrido es excesivamente lenta. En la actualidad se incorporan arreglos al sistema con lo que se elimina el movimiento del transductor. De esta forma se puede obtener imágenes 2D y 3D del espacio de interés con velocidades muy rápidas, lo que permite observar el movimiento de órganos y tejidos en el cuerpo humano. 1.3.9 Modos de visualización Para visualizar la imagen en pantalla se emplean diferentes modos, dentro de los cuales podemos encontrar: •. Modo A. 13.
(21) Equipos de ultrasonido Hiscan y Cinescan. •. Modo B. •. Modo B-Scan. Con el modo A (amplitud) se representan solo las amplitudes de los ecos respecto al tiempo, es decir, es representada en una sola línea de ultrasonido en función de la profundidad. La imagen óptica es unidimensional. Con el modo B (brillo) se representa una imagen óptica en 2D asignando niveles de gris proporcionales a la amplitud de los ecos, las zonas mas claras corresponden a ecos de mayor amplitud y viceversa. En el modo B-Scan el transductor hace un barrido sobre la zona que se estudia y en cada una de las posiciones que se detiene recoge la información de una línea y al terminar la última línea tenemos una imagen bidimensional.. 1.4 Partes que componen un sistema de ultrasonido con fines médicos Los equipos de ultrasonido constan de los siguientes componentes: •. TRANSDUCTOR (También es conocido como sonda) - Es el sitio donde se encuentran los cristales que se mueven para emitir las ondas ultrasónicas. Estos transductores también reciben los ecos, para transformarlos en energía eléctrica.. •. RECEPTOR - Capta las señales eléctricas y las envía al amplificador.. •. AMPLIFICADOR - Amplifica las ondas eléctricas.. •. SELECCIONADOR - Selecciona las ondas eléctricas que son relevantes para el estudio.. •. MÓDULO. DE. PROCESAMIENTO. -. Transforma. estas. corrientes. en. representaciones gráficas para verlas en pantalla, guardarlas en disquete, vídeo o imprimirlas en papel. •. CALIBRADORES - Son controles que permiten hacer mediciones, poseen botones y teclas para aumentar o disminuir ecos, de acuerdo a la claridad con la que se reciba la señal.. •. TECLADO Permite introducir comandos y los datos del paciente, así como los indicadores de la sesión, incluyendo fecha del estudio.. •. IMPRESORA Para imprimir las imágenes en papel.. 14.
(22) Equipos de ultrasonido Hiscan y Cinescan. 1.4.1 Principio básico de funcionamiento de un ultrasonido con fines médicos Las ondas ultrasónicas. originadas en el transductor (sonda), que previamente es. apoyado sobre el cuerpo pasan a través de los tejidos hasta su límite de profundidad. Para mejorar el contacto entre la piel y la sonda se aplica una jalea líquida o aceite. El transductor está conectado a una computadora con una pantalla de presentación. Al pasar las ondas de sonido a través del cuerpo, los órganos las reflejan y crean ecos. La computadora convierte estos ecos en una imagen de los órganos del cuerpo. Esta técnica es especialmente útil para ver los tejidos blandos, como los riñones, el hígado y el útero. Los tejidos blandos no aparecen bien delineados en las imágenes de rayos X comunes.. 1.5 Aplicaciones del ultrasonido en la medicina En la medicina los ultrasonidos se utilizan en dos campos fundamentalmente: 1. Diagnóstico: El ultrasonido sirve para conocer las condiciones de los órganos del cuerpo humano (algunos de los más modernos equipos describen el flujo sanguíneo o el funcionamiento de las vísceras), más que para modificar las condiciones de salud del paciente. La principal aplicación del ultrasonido diagnóstico es en el campo de la Ginecoobstetricia porque permite monitorear al feto a lo largo de la gestación con posibilidades muy amplias de exploración, sin riesgo alguno. 2. Terapéutico: Los ultrasonidos son ondas de naturaleza mecánica que producen tres efectos principales: Mecánico. Permite que las células o moléculas se muevan (éste es el principio de la eliminación de placa dentobacteriana por ultrasonido). Térmico. Las ondas sonoras pueden producir calor. Químico. El ultrasonido también puede modificar las propiedades de la materia.. 15.
(23) Equipos de ultrasonido Hiscan y Cinescan. Estos efectos son utilizados fundamentalmente en traumatología y ortodoncia, aunque las dosis e intensidades son diferentes a los casos en los que el ultrasonido es empleado como método diagnóstico. Principales aplicaciones Diagnóstico: Cardiología (cámaras, coronárias, válvulas) Angiología (incluyendo imagen intravascular) Medicina interna (hígado, páncreas, riñones...) Sistema músculo-esquelético (Densitometría ósea) Ginecología y obstetricia Oftalmología Dermatología Nefrología Endocrinología (tiroides, supra-renal, gónadas...) Terapia: Fisioterapia Nefrología (litotripsia) Oncología (Hipertermia) Ortopedia. 16.
(24) Equipos de ultrasonido Hiscan y Cinescan. Figura 5. Las ondas sonoras reflejadas por las diferentes partes del útero de una mujer embarazada son distintas dependiendo del tejido con el que se encuentran.. Figura 6. El tamaño del feto, que puede medirse utilizando ultrasonido, permite a los médicos estimar la fecha del parto con precisión.. 17.
(25) Equipos de ultrasonido Hiscan y Cinescan. 1.6 Principales beneficios del ultrasonido Inocuidad: El sistema no afecta las condiciones de salud del paciente porque no emplea métodos invasivos (cirugía), productos químicos o radiaciones. Esto permite repetir las exploraciones cuantas veces sea necesario, sin perjudicar al paciente, ni siquiera en casos de embarazo, porque tampoco afecta al feto. El ultrasonido posee esta gran ventaja respecto a otros métodos diagnósticos como los rayos X o la utilización de medios de contraste. Comodidad: No requiere posiciones incómodas o compresiones para el paciente. Confiabilidad: Es muy alta, rango de certeza de cerca de 100 por ciento.. 18.
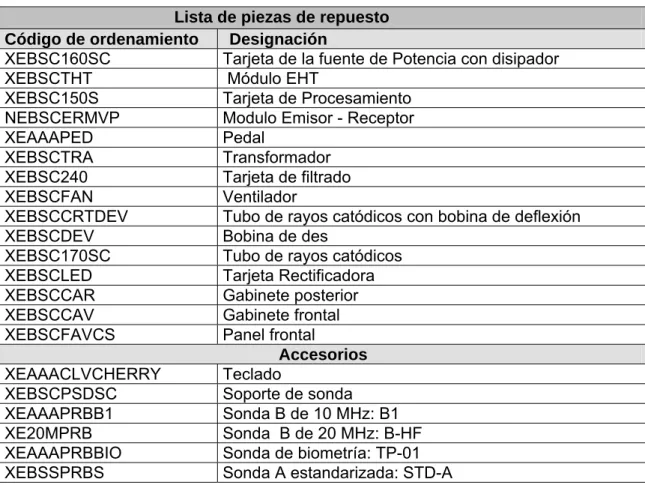
(26) Equipos de ultrasonido Hiscan y Cinescan. Capítulo 2: Equipo ultrasonido Cinescan 2.1 Uso específico El instrumento Cinescan S es un sistema completo de ecografía diseñado solamente para el diagnóstico y cálculo de parámetros en oftalmología [3] [6]. Consta de tres funciones básicas. 1. Ecografía B-scan usando una sonda mecánica de exploración sectorial. 2. Ecografía A estandarizada para diagnóstico y Biometría Axial. 3. Cálculo de la IOL (lente intraocular) utilizando las 6 fórmulas más populares. Los sitios en la anatomía del ojo con los que las sondas entran en contacto son la córnea y la esclera, empleando en ocasiones la técnica de inmersión. Principales usos: Se utiliza para el diagnóstico y cálculo de parámetros en oftalmología. Dentro de los parámetros que se pueden calcular se encuentran longitud axial total, cálculo de la lente intraocular, biometría axial, etc. Permite explorar la cámara posterior, más específicamente la retina, con la sonda B-scan de 20 MHz. También permite la exploración de la cámara anterior.. 2.2 Características técnicas fundamentales 2.2.1 Configuración básica El equipo de ultrasonido Cinescan S está compuesto por los siguientes componentes: 1. Unidad Cinescan 2. Accesorios 9 Teclado 9 Pedal 9 Soporte de sensor y bloque de prueba 9 Sensores tipo A y B. 19.
(27) Equipos de ultrasonido Hiscan y Cinescan. Unidad Cinescan: esta constituida por el monitor, la fuente de alimentación, el microprocesador y todo el hardware exceptuando los accesorios. Teclado: teclado de 80 teclas con trackball incluido Pedal: Permite al usuario congelar la imagen para el estudio detallado de esta. Soporte de sensor y bloque de prueba: Este ha sido diseñado para un fácil manejo de los sensores. Esta directamente fijado al monitor con el mismo tornillo que fija al bloque de pruebas. Donde los sensores están ubicados horizontalmente evitando así riesgos de caída, los orificios mayores son para los sensores B y los pequeños para los sensores estandarizados A-scan. Sensores tipo A y B: El equipo cuenta con diferentes tipos de sensores de diferentes características cada uno. Otros accesorios: . Frasco de Gel. Cables principales.. En la figura del anexo # 1se puede ver el equipo Cinescan y sus componentes básicos. 2.2.2 Características del Hardware Alimentación El equipo opera con una alimentación de 110/120V AC y un fusible a 2.5 AT o con una alimentación de 230/240V AC con un fusible a 1.25 AT, en un rango de temperaturas de 15 a 30 grados y con una humedad máxima relativa del 95%. El tipo de protección contra descargas eléctricas es Clase 1 y el acuerdo de protección contra estas descargas es de tipo B. Es necesaria una buena conexión de tierra con una baja impedancia (menor que 0,1 Ω) para garantizar que el dispositivo nos brinde una imagen de calidad ya que una tierra pobre introducirá ruido en nuestro sistema. Sensores Sensor B-scan de 10 MHz:. 20.
(28) Equipos de ultrasonido Hiscan y Cinescan. Sensor permanentemente sellado y a prueba de fuga. Tipo de referencia:. B1.. Sector angular. 50°. Frecuencia del transductor. 10 MHz. Modo de emisión corrida. Pulsada. Lente focal. 24 a 26 mm desde membrana. Diámetro activo. 7.5 mm. Superficie activa. 44 mm². Resolution axial. 0.20 mm (a - 6dB). Resolution lateral. 0.60 mm (a - 6dB). Sensor B-scan de foco largo de 20 MHz: Sensor permanentemente sellado y a prueba de fuga. Tipo de referencia:. B-HF.. Sector angular. 30 y 50°. Frecuencia del transductor. 20 MHz. Modo de emisión corrida. Pulsada. Lente focal. 24 a 26 mm desde membrana. Diámetro activo. 7.5 mm. Superficie activa. 44 mm². Resolution axial. 0.10 mm (a - 6dB). Resolution lateral. 0.25 mm (a - 6dB). Sensor B-scan de foco corto de 20 MHz: Sensor permanentemente sellado y a prueba de fuga. Tipo de referencia:. B-HF-FC. 21.
(29) Equipos de ultrasonido Hiscan y Cinescan. Sector angular. 50°. Frecuencia del transductor. 20 MHz. Modo de emisión corrida. Pulsada. Lente focal. 8 a 10 mm desde membrana. Diámetro activo. 7.5 mm. Superficie activa. 44 mm². Resolution axial. 0.08 mm (a - 6dB). Resolution lateral. 0.16 mm (a - 6dB). Sensor A-scan estandarizado: El sensor A-scan estandarizado es unidireccional Tipo de referencia:. STD-A. Frecuencia del transductor. 8 MHz. Modo de emisión corrida. Pulsada. Lente focal. No enfocado. Diámetro activo. 5 mm. Superficie activa. 20 mm². Resolution axial. 0.02 mm (a - 6dB). Sólo un sensor de 20MHz puede ser conectado a la vez, utilizando un conector con una etiqueta amarilla para el de enfoque largo y un conector con etiqueta roja para el enfoque corto. Ambos conectores tienen el mismo grosor y son metálicos. Tarjeta de filtrado Esta tarjeta se encarga de rectificar y filtrar los voltajes provenientes directamente del secundario del transformador, garantizando de esta forma el adecuado filtraje que requiere un dispositivo como este, sensible al ruido y demás perturbaciones de la red eléctrica, en el suministro de su energía. El secundario del transformador está constituido por tres enrollados:. 22.
(30) Equipos de ultrasonido Hiscan y Cinescan. - Dos idénticos de 33 Vac y 2 A. - Uno con derivación central suministrando 2 * 130 Vac / 0,2 A, protegido por fusibles rápidos de 0,25 A. Estos voltajes llegan a la tarjeta, son rectificados y filtrados convenientemente para luego salir de la misma hacia la tarjeta de suministro de energía como: - Dos salidas de 40 VDC / 2 A, protegidas por fusibles de retardo a 3,15 A y por los diodos CR4 y CR5. - Una salida de 140 VDC.. Tarjeta de suministro de energía Esta tarjeta, como su nombre lo indica, se encarga de suministrar la alimentación necesaria a todos los módulos del dispositivo. Se encuentra dividida en varias secciones o partes componentes. 1- Convertidor de 5 V.. Alimentará la tarjeta de procesamiento, el control del. suministrador de voltaje de emisión y diversos puntos donde se requieren 5 V. Este circuito utiliza el regulador L4977. 2- Convertidor de –20 V. Para alimentar los amplificadores X e Y, encargados de soportar los enrollados de deflexión. Este circuito utiliza el regulador L296P. 3- Convertidor de 24 V. Para alimentar los amplificadores X e Y más el control del circuito de alta tensión (EHT). Este circuito utiliza el regulador L296P. 4- Regulador de 22,4 V y -18 V. Para alimentar los amplificadores X e Y más el tubo de rayos catódicos. Este circuito utiliza los reguladores LM317L y el LM337L. 5- Reguladores de +- 12 V, los cuales alimentarán los amplificadores Y, X y Z, la tarjeta de procesamiento, el filamento del tubo de rayos catódicos, el control del suministrador de voltaje de emisión, más el control del circuito de alta tensión. Estos circuitos utilizan los reguladores 7812 y 7912. 6- Suministrador de voltaje de emisión: Este circuito se encarga, como su nombre propiamente lo dice, de suministrar el voltaje necesario para lograr la emisión de las ondas ultrasónicas y de esta manera logra controlar la intensidad de dicha emisión. Como sabemos, las sondas A y B son diferentes, para emitir necesitan diferentes intensidades en dependencia de la tecnología empleada y. 23.
(31) Equipos de ultrasonido Hiscan y Cinescan. la distancia focal. B-scan necesita +- 30 V, A-scan necesita +- 70 V. El voltaje es fijado desde el circuito Dallas, utilizando las señales DQ, CLK y RST. Se ajustan los voltajes positivos y negativos por medio del potenciómetro R819, las salidas 14 y 8 de los amplificadores operacionales LM324 nos brinda la referencia de dichos voltajes. La regulación entonces queda a cargo de los otros dos amplificadores operacionales LM324. 7- Circuito inhibidor: Este circuito corta, o no deja funcionar los convertidores anteriormente mencionados si no está conectada la tarjeta de procesamiento, si recibe una señal de stand-by o si el nivel de la salida de reset del convertidor de 5 V está en un nivel bajo. Este circuito también brindará información al usuario por intermedio de los diodos LED, en el frente del equipo. 8- Circuito de seguridad en el barrido de las señales X e Y: Si la desviación de estas señales no se presenta simultáneamente, podría resultar peligroso para el tubo de rayos catódicos. En este caso los circuitos de disparo orientarán el corte de la alta tensión. 9- Circuito de control de EHT (Extra high tension): En este dispositivo la alta tensión utilizada es 11 kV. La señal proveniente del circuito visto en el punto anterior debe tener un nivel bajo, Q750 no conduce y el pin 10 del MA750 estará cercano a los 12 V, el pin 8 también lo estará y tendremos alta tensión. Si la señal antes mencionada viene con un nivel alto Q750 se saturará, los pines 10 y 8 se encontrarán cercanos a 0 V, el voltaje en TP750 bajará a 0 y la EHT se cortará. 10- Convertidor EHT: Este circuito es el encargado de generar la EHT propiamente dicha. La señal del circuito de control viene aquí a través de un fusible rápido de 200 mA. El transformador T701 entrega los voltajes para las diferentes puertas del CRT, - 30 V para la luminancia, 350 V de aceleración y el necesario para el foco, este último ajustado por medio de la R703. Este módulo cuenta con un multiplicador Schenkel, que no es otra cosa que un sistema con diodos cargando capacitores hasta lograr los 11 kV de EHT. 11- Amplificadores X e Y: Son dos amplificadores de potencia trabajando en modo Push-pull, para soportar los dos enrollados de deflexión para la desviación magnética del tubo de rayos catódicos. Esta amplificación es controlada por medio de los amplificadores operacionales LM318. 12- Circuito de corrección magnética: El primario del transformador introduce una influencia magnética en los enrollados de deflexión, sumándose a la normal. Es necesario entonces añadir una influencia igual en oposición de fase. Este. 24.
(32) Equipos de ultrasonido Hiscan y Cinescan. trabajo es realizado por una configuración con cuatro. amplificadores. operacionales LM324. 13- Amplificador Z: Esta sección se encuentra insertada en la tarjeta de alimentación. Es un buffer driving de la etapa CRT. Su entrada proviene de la tarjeta de procesamiento y es una entrada diferencial. Su ganancia es 1. 14- La tarjeta de modulación: Es un pequeño circuito que funciona como oscilador, introduciendo una pequeña variación en la frecuencia básica del convertidor conmutador de + 5V. Esto se hace con el propósito de evitar la interferencia que provoca en la pantalla el funcionamiento de la sonda B.. Tarjeta de procesamiento En esta unidad se lidera todo el proceso de funcionamiento del Cinescan. Está compuesta por: 1- Microprocesador Motorola MC 68302 a 20 Mhz. Encargado de controlar todo el proceso. 2- Una memoria flash EEPROM, con una escritura imposible de alterar por el usuario con el programa de aplicación. 3- Cinco Dispositivos de Lógica Programable (PLD) EPM7128-10ns de Altera con un reloj de 40 Mhz encargados de dar la secuencia básica de cronometraje. -. MAX A y MAX B trabajan en la conversión del barrido de las imágenes de los sensores A y B mediante el direccionamiento de memoria.. -. MAX C controla el sistema de operaciones globales por el procesamiento de datos e imágenes.. -. MAX D y MAX E controlan el flujo de las informaciones Y, Z y X para el monitor. El primero procesa los datos y el segundo el direccionamiento.. 4- Un sistema de memorias RAM de 512 K * 8. 5- El Cineloop: Es una pequeña tarjeta conectada a la tarjeta de procesamiento principal, está compuesto por dos circuitos: -. Un EPLD para manejar las operaciones.. 25.
(33) Equipos de ultrasonido Hiscan y Cinescan. -. Una memoria DRAM seccionalizada de la siguiente manera: 4 MByte para 20 imágenes con una secuencia de 2 segundos, 8 MByte para 40 imágenes con una secuencia de 4 segundos y 16 MByte para 80 imágenes con una secuencia de 8 segundos.. La tarjeta de procesamiento funciona de la siguiente manera: Desde el programa principal inicializa la memoria de trabajo, la conversión del barrido y el teclado con el trackball incorporado. Fija la secuencia de cronometraje en dependencia de la función que se está realizando. El periodo del reloj es de 25 nseg, la adquisición de la señal ultrasónica es hecha en 50 nseg y la velocidad de muestreo es de 20 MHz. La adquisición de la señal es realizada dentro del hardware independientemente del software y de las otras funciones. Otras operaciones pueden ser procesadas entre dos secuencias de emisión-recepción. El microprocesador tiene su propio ciclo de trabajo paralelo y sus operaciones son procesadas entre dos secuencias de adquisición. Este tiempo es utilizado para leer o escribir en la memoria de trabajo. Esta unidad adquiere los datos desde el bloque emisor – receptor, la amplitud de la señal es ajustada por el amplificador operacional AD817, en el bloque IC9,. para. corregir el rango dinámico del convertidor analógico – digital, este rango se establece de 0 a 5V. Los datos se escriben en las memorias IC15 para la conversión del barrido, IC20 para las señales del monitor, dentro del cineloop para guardar la continuidad de la secuencia. MAX A y MAX B se encargan del direccionamiento. La lectura de la señal de video es controlada por MAX C, los datos van a través del convertidor digitalanalógico ADV478 en el bloque IC14, debemos mencionar que el microprocesador puede añadir información a esta señal de video, como puede ser el nombre y la identificación del paciente. Las señales Y, Z y X son controladas por MAX D que procesa los datos y MAX E que procesa el direccionamiento. La señal Z viene desde el convertidor digital - analógico ADV478 en el bloque IC27, X e Y van a través de los convertidores digital – analógico LTC1448 en los bloques IC29 e IC31. A continuación de estos bloques, un sistema compuesto por varios amplificadores operacionales, genera el barrido en el tubo de rayos catódicos. Configuración básica del Microprocesador. 26.
(34) Equipos de ultrasonido Hiscan y Cinescan. - Microprocesador Motorola MC 68302/20MHz - Circuito de Reset TL7705 - Memoria Flash EEPROM : 1Mo x 8 / 90ns - 29F080 - Todas las bibliotecas necesarias de lenguaje de programación C - Memoria RAM de Sistema de 512K x 8 / 70ns El diagrama en bloques se puede ver en el anexo # 3.. Tarjeta CRT Esta tarjeta se encuentra directamente conectada al tubo de rayos catódicos (CRT). Aquí se concentran todas las conexiones necesarias para el trabajo del CRT. Llega el cordón J1 desde la tarjeta de alimentación. con los voltajes para el filamento, la. luminancia, aceleración, el foco y la conexión de tierra. J3 con la señal Z. J4 con los 140 VDC desde la tarjeta de filtrado. Como componentes interesantes tenemos el AD818 que amplificará la señal Z. Un CI 7812, regulador de 12 V y un CI LM2435 que es utilizado como excitador del cátodo. Módulo emisor / receptor Este bloque se encarga de emitir las ondas ultrasónicas y de recibir sus ecos. Las características de los pulsos son similares para los sensores A-scan y B-scan. La sonda B cuenta con un propio preamplificador mientras que la preamplificación de la sonda A se realiza dentro del bloque emisor-receptor propiamente dicho, sin embargo ambos preamplificadores tienen aproximadamente la misma estructura. Después de esta etapa la señal pasa por un filtro pasa banda y un amplificador logarítmico compuesto fundamentalmente por el circuito AD8310 alimentado con 5 V. El bloque consta también de un sistema de conmutación que selecciona o habilita una sonda u otra mediante el circuito 74HC595, que es quien permite al microprocesador activar los transistores T14, T15 y T13 para las sondas B10, B20 y A respectivamente. Teclado Este está compuesto de 80 teclas el cual puede ser “AZERTY” o “QWERTY” las que son usadas para las funciones básicas de la unidad. Para cada pantalla diferente las 4 funciones desde F1 a F4 están dispuestas en la parte baja de la pantalla, estas actúan como sub.-funciones de las funciones básicas las que están accesibles desde F5 a. 27.
(35) Equipos de ultrasonido Hiscan y Cinescan. F10. La tecla ESCAPE permite al usuario quitar cualquier pantalla en ejecución y regresar al nivel superior paso a paso. La tecla ALT permite al usuario el cambio de acercamiento (Zoom) en los modos A o B, ejecutable en la mayoría de las pantallas. Con la combinación de las teclas Ctrl + flecha derecha o flecha Izquierda se puede cambiar la profundidad de visualización a la derecha o izquierda en modo B o en modo A ejecutable en la mayoría de las pantallas. Ver anexo # 2. 2.2.3 Características del Software Principios del software. El microprocesador controla las siguientes tareas: −. La secuencia de inicialización por transferencia de datos desde la memoria Flash hacia la memoria de trabajo para realizar la conversión del barrido a salida de video estándar.. −. La exploración de la interface de entrada de usuario (teclado y trackball) para detectar las selecciones del usuario.. −. La visualización y refrescamiento en pantalla de los valores de parámetros como la Ganancia, Dinámica, etc.. −. El análisis automático de los datos obtenidos por la exploración A-Scan.. −. Atención de las interfaces de salida tales como impresoras y computadoras enlazadas.. −. La visualización de la fecha y la hora.. Pantalla oculta o Setup Este equipamiento, al igual que casi todos los modernos dispositivos electrónicos como computadoras, receptores de TV, etc., consta de una pantalla oculta a la que no debe tener acceso el usuario común. Desde esta pantalla se tiene acceso a una serie de parámetros que pueden ser modificados desde la misma para corregir errores o poner el equipo a punto después de actualizar el software. También hay una serie de valores que al comenzar el funcionamiento del equipo son asumidos por defecto y que pueden requerir variaciones para un mejor aprovechamiento del mismo. Instalación de software. 28.
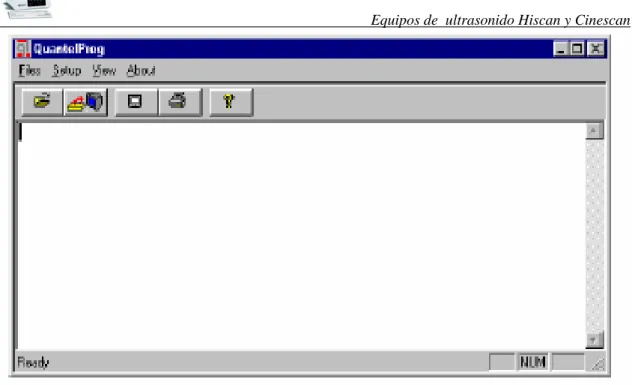
(36) Equipos de ultrasonido Hiscan y Cinescan. Este equipo permite la actualización de su software en caso de que el fabricante así lo recomiende debido a alguna mejora que se le quiera incorporar al Cinescan. Conexión de la unidad a la computadora Existe el riesgo de el Cinescan reciba una descarga electrostática cuando este se conecta a una Laptop. Es más seguro usar una laptop con suministro de energía externo desde la red eléctrica si esta posee conexión a tierra física. Conexión segura Para evitar una descarga eléctrica se debe proceder de la siguiente manera: 1. Conectar primeramente el cable a la computadora: conector Sub D de 9 pines a cualquier puerto RS232 disponible, COM1 u otro. 2. Estar seguro de que el interruptor del Cinescan está en Off pero conectado a la red de suministro eléctrico. 3. Antes de conectar el cable al Cinescan se debe tocar la parte metálica del conector Mini-DIN de 6 pines (parecido a un conector BNC) para poner la referencia a tierra de la Laptop. Preparación del Cinescan para la transferencia 1. Poner el interruptor del Cinescan en On. 2. Acceder a la pantalla oculta (setup). •. El diálogo entre la computadora y la unidad para la transferencia de software solo es posible en esta página. Los detalles se describen con claridad en [ 7].. •. La nueva versión del software será cargada desde la computadora hacia las memorias Flash de la Unidad.. Software Quantel Prog Quantelprog es el software utilitario para realizar la conexión entre la computadora y el equipo Cinescan. El fichero Quantelprog.exe se puede ejecutar desde el disquete, CDROM o desde el disco duro si se copió previamente hacia la computadora. Cuando es ejecutado la siguiente ventana aparece en pantalla:. 29.
(37) Equipos de ultrasonido Hiscan y Cinescan. Figura 7 Ventana de inicio del software Quantel Prog del Cinescan.. Botones de funciones. Posibles selecciones Botón para localizar y seleccionar el fichero de la nueva versión del software a instalar. La extensión del nombre del fichero es .p . Por defecto la ubicación del directorio está puesta en A: \ . Botón para iniciar la transferencia del nuevo software hacia el Cinescan. Botón que limpia la pantalla, cualquier dato es borrado.. Botón para imprimir los datos mostrados en la pantalla. Botón mediante el cual se obtiene información de la versión del software. Chequeo de los datos en el menú Setup En el menú Setup de la barra de herramientas del software QuantelProg se encuentra la opción Port (también se puede acceder a esta opción con la tecla F9) la cual permite definir los parámetros de la transferencia a realizar. Los valores que trae por defecto el software son los siguientes:. 30.
(38) Equipos de ultrasonido Hiscan y Cinescan. −. Razón de Baudios: 115200. −. Paridad: par. −. Bits de datos: 8. −. Bits de parada: 1. −. Eco: Off. −. Auto Stop: No seleccionada. Transferencia del nuevo software hacia la Unidad del Cinescan Después de haber preparado el Cinescan (selección en la pantalla oculta) y haber seleccionado (desde QuantelProg) el fichero de instalación, solo basta presionar el botón de transferencia para transferir el nuevo software desde la computadora hacia la memoria del Cinescan. En [7] se describen los detalles de esta operación. Cuando concluye el proceso de transferencia en la computadora aparece una ventana de notificación. Posteriormente se deben realizar las siguientes acciones: −. Poner a Off el switch del Cinescan.. −. No desconectar el cable de RS232.. −. El switch de la unidad debe ponerse nuevamente en On. Inicialización y configuración de la Unidad con el nuevo software Después de poner en On el switch de la Unidad se visualiza en la pantalla de la computadora una ventana donde se entran parámetros como el número de serie del equipo, la fecha y la hora. Posteriormente le sigue un mensaje de advertencia indicando que de seguir con la instalación del software el sector 0 de la memoria del Cinescan será modificado. El software chequea toda la memoria del Cinescan y borra las versiones antiguas para proseguir con la actualización. Procedimiento de RESET General Es necesario hacer un RESET general porque es la única vía de conseguir que todos los parámetros del equipo sean compatibles con la nueva versión del software, las pantallas de este proceso se visualizan en el Cinescan. Si el número de la versión anterior es menor que el de la nueva versión el RESET general comienza automáticamente. En [7] se exponen los detalles de este proceso.. 31.
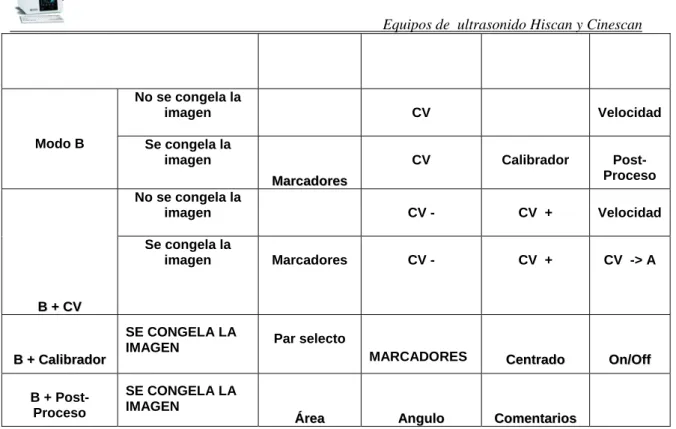
(39) Equipos de ultrasonido Hiscan y Cinescan. 2.3 Principios físicos de funcionamiento El funcionamiento del Cinescan se basa en el principio físico del ultrasonido de imágenes diagnóstico. En el epígrafe 1.3 del Capítulo 1 se trató este tema, por lo que solo mencionaremos en el presente epígrafe que el material piezoeléctrico de la sonda A-scan estandarizada es de cerámica PZT, que es uno de los materiales eléctricos más usados para la generación de imágenes médicas. Las tres restantes sondas tienen un material piezoeléctrico compuesto (aleación). Las láminas piezoeléctricas de las 4 sondas son rectangulares y su modo de vibración es de espesor, pues la vibración de la cerámica piezoeléctrica ocurre en la misma dirección de polarización.. 2.4 Fortalezas, facilidades y debilidades del equipo 2.4.1 Fortalezas y potencialidades del Cinescan El Cinescan posee una serie de potencialidades las cuales lo convierten en un equipo muy útil en el diagnóstico y cálculo de parámetros en oftalmología. Su fortaleza radica en los distintos modos de trabajo que posee y la calidad y fiabilidad de las imágenes obtenidas. A continuación se exponen las características y potencialidades de sus modos de trabajo. Ecografía B-SCAN: La ecografía B-scan muestra una imagen de alta definición en la pantalla interna. Esta tiene 384 líneas de 1664 puntos. El ángulo del sector de exploración es de 50 grados. Existe una salida estándar de vídeo compuesto disponible en el panel trasero para conexiones directas para: Video printer, monitor. externo, V.C.R, etc. La memoria. interna permite el almacenamiento de 10 imágenes para su posterior estudio. El acceso a este modo posee acceso desde el teclado con la tecla F5. La cual contiene una serie de funciones disponibles en las teclas de funciones secundarias desde F1 a F4. Ver tabla # 1. 32.
(40) Equipos de ultrasonido Hiscan y Cinescan. No se congela la imagen Modo B. CV. Se congela la imagen. Velocidad. CV. Calibrador. PostProceso. CV -. CV +. Velocidad. CV -. CV +. CV -> A. MARCADORES. Centrado. O n / O ff. Angulo. Comentarios. Marcadores No se congela la imagen Se congela la imagen. Marcadores. B + CV. B + Calibrador B + PostProceso. SE CONGELA LA IMAGEN SE CONGELA LA IMAGEN. Par selecto. Área. Tabla 1. Teclas de funciones secundarias para el modo de exploración B-Scan. Sector de orientación del sensor B de 10 MHz Por convención la parte superior de la imagen del barrido B con este sensor esta en correspondencia con la parte marcada con una franja blanca en el sensor. La adquisición de la imagen con este sensor es la técnica menos invasiva ya que el sensor trabaja sobre el párpado del paciente obteniéndose imágenes del cristalino y retina así como de cualquier cuerpo extraño localizado en el humor vítreo. Adquisición de la imagen de la cámara anterior con el sensor modo B de 20 MHz de enfoque largo Para la adquisición de esta imagen se instala un dispositivo en la sclera (sclera shell) el cual se llena con suero fisiológico, obstruyendo con methylcelulosa para evitar que este se derrame. A continuación se introduce el sensor evitando la acumulación de burbujas de aire entre el transductor y dicho suero, esto último es para lograr una imagen óptima. El plano focal del sensor esta restringida a un pequeño segmento de aproximadamente 25 mm. Presionando el pedal se congela la imagen para su mejor estudio. Adquisición de la imagen de la cámara anterior con el sensor modo B de 20 MHz de enfoque corto. 33.
(41) Equipos de ultrasonido Hiscan y Cinescan. Para la adquisición de esta imagen con este tipo de sensor se escoge el Zoom de 20mm/ 50° y se aplica un poco de methylcelulosa en el ojo que actúa como acople entre el transductor y el ojo; luego se posiciona el sensor evitando la acumulación de burbujas de aire al frente del transductor, posicionando este ultimo verticalmente a la cámara anterior donde el plano focal esta designado por un pequeño segmento de alrededor de 8 mm. Presionando el pedal se congela la imagen para su mejor estudio. Adquisición de la imagen de la cámara posterior con el sensor modo B de 20 MHz de enfoque largo En este caso el sensor se emplaza sobre la sclera evitando así el cristalino o lente. Siendo en este caso la retina la zona focal.. Figura 8. Imagen obtenida del segmento posterior en una prueba B-scan.. Ecografía A-SCAN: La ecografía A-scan estandarizada es especialmente diseñada para diagnósticos ecográficos. El rayo de ultrasonido no es enfocado es un rayo paralelo. Este modo de barrido tiene un acceso rápido desde el teclado con la tecla F6. Con este modo se obtiene la longitud axial del ojo, la cual se puede obtener con dos técnicas diferentes como la técnica de inmersión y la de contacto, aunque en este caso la técnica de inmersión es la indicada.. 34.
(42) Equipos de ultrasonido Hiscan y Cinescan. Técnica de inmersión Esta técnica se realiza usando la scleral shell, la cual se llena con suero fisiológico. En ella se ajusta la ganancia para obtener la cima de los ecos dentro de las 2 líneas horizontales, así una baja ganancia de T-20 dB permite ver todas las estructuras más fácilmente. La técnica de inmersión puede resultar algo difícil para principiantes, en su forma básica ayuda a controlar la posición axial del ecograma recomendándose el ajuste de la ganancia a –6 dB. El software tiene un criterio de nivel mínimo para el control de la posición axial del ecograma: • La cima de los ecos debe ser más alta que la línea horizontal que está al 82% del nivel de saturación. • Se debe reconocer el patrón de longitud axial en adición. • El borde ascendente de la curva retinal debe ser muy espaciado. • Sí. el eco retinal esta por encima de la línea horizontal pero el borde. creciente no es lo bastante agudo se activa la alarma. Cuando se cumplen todos estos criterios la imagen se congela. Técnica de contacto Técnica de contacto básica: La ganancia recomendada es de -6 dB y el software tiene un criterio de nivel mínimo para el control de la posición axial del ecograma que son los mismos que para la técnica de inmersión. Técnica de contacto avanzada: Se recomienda una baja ganancia de –20 dB. La cima de los ecos debe estar dentro de las 2 líneas horizontales que están entre el 5% y el 95% del nivel de saturación. Para los usuarios más experimentados en esta técnica, como en la técnica de la inmersión, la altura de los ecos no puede ser un criterio suficiente. Con una Ganancia más baja el usuario puede distinguir. las. diferentes capas y debe ser capaz de apreciar la mejor posición de la sonda. El programa chequea que los ecos están entre el 5% y el 95%, debe reconocer el patrón de longitud axial y entonces congela la imagen.. 35.
(43) Equipos de ultrasonido Hiscan y Cinescan. Figura 9. Ecograma obtenido en una prueba A-scan.. Medición de la longitud axial: La memoria interna, permite el almacenamiento de hasta 10 exploraciones para cada ojo. Cada exploración se guarda con las 3 medidas del segmento: cámara anterior, lente, vítreo y la longitud axial total. La página de resultados exterioriza el valor medio de las 10 medidas y calcula la desviación estándar para cada segmento. El programa de adquisición es adaptable para todos los casos posibles: - Ojos Phakic, aphakic o seudo phakic (PMMA, Acrylico o Silicona) - Congelamiento manual o automático de la imagen. - Almacenamiento manual o automático de 10 exploraciones. Cálculo de IOL: La página de cálculo brinda la longitud axial a partir de: - Una exploración específica - El promedio de varias exploraciones. 36.
(44) Equipos de ultrasonido Hiscan y Cinescan. - Un valor introducido por el operador Efectúa la keratometría. de ambos ojos almacenada en el fichero de archivo del. paciente en campos diferentes. El rango posible de la keratometría es de 5 a 13 mm ó 25 a 68 Dioptrías. Las 6 fórmulas disponibles para el cálculo del I.O.L son: SRK-II, SRK-T, HOLLADAY, HOFFER-Q, BINKHORST II, HAIGIS. 2.4.2 Actualizaciones y mejoras El hardware y el software de este equipo se han venido actualizando desde su salida en el año 2001 [5]. Con estas actualizaciones se han erradicado fallas existentes en las primeras versiones y se han mejorado las potencialidades del equipo, aumentando la fiabilidad y calidad de las imágenes obtenidas. A continuación mencionamos algunas de las mejoras: •. A partir del modelo SN 1230 se realizan modificaciones del hardware pues existía un problema en la pantalla: un zoom de 60 mm de la imagen obtenida en el modo B provocaba una distorsión en la parte izquierda de dicha imagen. Esto estaba presente en algunas unidades donde los ajustes no permitieron una buena imagen. El haz explorador del tubo de rayos catódicos no tenía el suficiente tiempo para retornar a la parte izquierda de la pantalla entre dos líneas del modo B-Scan de 60mm. Para corregir este defecto se acortó el tiempo de duración global de una trama de 22ms a 20ms. Este tiempo se acorta aumentando el voltaje entregado a las bobinas de deflexión. Para ello se modificaron componentes internas en la tarjeta de suministro de energía.. •. Para evitar interrupciones de la imagen al cambiar de una página para otra, la resistencia que regula el retardo del pulso de tiempo del circuito monoestable X (MN620) fue incrementada (la resistencia R627 fue incrementada de 100 KΩ a 390 KΩ). Para el circuito monoestable Y la resistencia R629 fue incrementada de 220 KΩ a 390 KΩ desde los comienzos del modelo Cinescan.. •. A partir de la versión con número de serie 1433 se mejora la estabilidad de la imagen del Cinescan cambiando un capacitor en la tarjeta de procesamiento. Se reemplaza el capacitor C86 (1µF) por un nuevo capacitor C86 de Tantalum /10µF/25 V/±20%/SMC. Ver figura del anexo 4.. •. Se mejora la estabilidad de la imagen del modo B-Scan cambiando un capacitor en la tarjeta de procesamiento. Se reemplaza el capacitor C19 (1µF). 37.
Figure




+7



Documento similar
Para la Competencia Mexicana de Tostado, la AMCCE proporcionará el equipo de tueste y software Cropster para uso durante la competencia, así como las 3 facilidades para catación y
LÍNEA DE VIDA DOBLE DE CABLE DE ACERO DE 1/4”, CON AMORTIGUADOR DE CAÍDA, 1 GANCHO DE 3/4“ Y 2 GANCHOS DE 2 1/4”.. Es un equipo de protección individual (1
Fabricante: GE Dirección del dispositivo: SECCION 3 No de serie: C5281028 Info adicional 1: Info adicional 2: Hardware Configuration Equipo en prueba Tipo No de serie CMC356
En la primera unidad se enfoca al desarrollo de competencias de diagnóstico de fallas en los componentes hardware y software de un equipo de cómputo que le permitirán
El software del DigivibeMX M20 permite realizar análisis de vibración en tiempo real así como de balanceo dinámico, ya que posee una serie de herramientas de
N064 EQUIPO DE HERRAMIENTAS PARA ALUMNOS DE MANTENIMIENTO 4 EQUIP DE FERRAMENTES PER A ALUMNES DE MANTENIMENT. EQSP EQUIPO DE SOLDADURA ELECTRICA
Cobertura 4.5G inicialmente disponible en algunas zonas de 162 centros poblados de 9 departamentos del país.. Requiere Chip 4G y equipos con hardware y software compatible con la
