Sincronización de itinerarios de buses en redes de gran tamaño
85
0
0
Texto completo
(2) PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE ESCUELA DE INGENIERÍA. SINCRONIZACIÓN DE ITINERARIOS DE BUSES EN REDES DE GRAN TAMAÑO. PAUL MICHAEL KNAPP DIMONTE Tesis presentada a la Comisión integrada por los profesores: RICARDO GIESEN ENCINA JUAN CARLOS MUÑOZ ABOGABIR HOMERO LARRAÍN IZQUIERDO ALEJANDRO TIRACHINI HERNÁNDEZ YADRAN ETEROVIC SOLANO. Para completar las exigencias del grado de Magíster en Ciencias de la Ingeniería. Santiago de Chile, enero, 2014.
(3) DEDICATORIA A mi familia y amigos, sin ellos nada habría sido posible.. ii.
(4) AGRADECIMIENTOS Indudablemente son muchas las personas que de una u otra forma me ayudaron o influyeron para que pudiera llegar aquí. Todas y cada una de ellas merece más allá de una mención, mi más profunda y eterna gratitud.. En primera instancia debo agradecer a los profesores del Departamento de Ingeniería de Transporte y Logística de la Pontificia Universidad Católica de Chile. Ellos no solo guiaron y acompañaron toda mi formación de pregrado sino que además, desde muy temprano y encabezados por el entonces Jefe del Departamento, el profesor Juan Enrique Coeymans, me incentivaron e insistieron para que continuara con ellos estudios de posgrado.. Mención especial debo hacer no solo para agradecer a mis dos profesores guías, Ricardo Giesen y Juan Carlos Muñoz, por haber sabido encausar y dirigir mi motivación y trabajo. También debo agradecer al profesor Robert Freund del MIT, a mis compañeros de posgrado y en general a todos quienes estuvieron en algún minuto conmigo, tuvieron la paciencia para escuchar sobre mi trabajo y supieron darme más de algún consejo.. Por otra parte, no puedo dejar de agradecer a mi familia y amigos. Ellos han sido un pilar fundamental a lo largo de toda mi vida, siempre mostraron interés por lo que yo hacía y nunca escatimaron en darme sus siempre buenas recomendaciones. Quizás no siempre contribuyeron a que mi trabajo fuese todo lo rápido que se podía pero, sin duda, son los responsables de que durante esta etapa hayan pasado muchos de los mejores momentos de mi vida.. Finalmente, esta investigación fue apoyada por el CEDEUS, CONICYT-FONDAP 15110020 y FONDECYT 1120993. Además debo reconocer el apoyo desinteresado del Centro de Excelencia “Bus Rapid Transit – Across Latitudes and Cultures” fundado por la Volvo Research and Educational Foundation (VREF). iii.
(5) ÍNDICE GENERAL Pág. DEDICATORIA ................................................................................................................ii AGRADECIMIENTOS ....................................................................................................iii RESUMEN ...................................................................................................................... vii ABSTRACT ....................................................................................................................viii 1.. INTRODUCCIÓN ...................................................................................................... 1 1.1.. Objetivos generales ............................................................................................. 3. 1.2.. Objetivos específicos ........................................................................................... 5. 2.. REVISIÓN BIBLIOGRÁFICA .................................................................................. 7. 3.. FORMULACIÓN MATEMÁTICA ......................................................................... 13. 4.. 3.1.. Supuestos del modelo ........................................................................................ 13. 3.2.. Modelo matemático ........................................................................................... 16. 3.3.. Características y tamaño del modelo ................................................................. 23. METODOLOGÍA DE RESOLUCIÓN .................................................................... 26 4.1.. 5.. 6.. Algoritmo para la optimización del modelo ...................................................... 28. APLICACIÓN AL TRANSANTIAGO ................................................................... 34 5.1.. Construcción de la base de datos ....................................................................... 35. 5.2.. Caso base de referencia ..................................................................................... 43. 5.3.. Resultados del modelo ....................................................................................... 44. 5.4.. Análisis de los resultados .................................................................................. 58. CONCLUSIONES Y RECOMENDACIONES ....................................................... 67. BIBLIOGRAFÍA ............................................................................................................. 73. iv.
(6) ÍNDICE DE TABLAS Pág. Tabla 3.1: Estimación del número de variables del modelo ............................................ 24 Tabla 3.2: Estimación del número de restricciones del modelo....................................... 25 Tabla 5.1: Resultados para el Caso A sin alterar las frecuencias ..................................... 46 Tabla 5.2: Headways óptimos y utilizados para el Caso A .............................................. 47 Tabla 5.3: Resultados para el Caso A con frecuencias optimizadas ................................ 48 Tabla 5.4: Resultados para el Caso A con frecuencias mínimas...................................... 49 Tabla 5.5: Resultados para el Caso B sin alterar las frecuencias ..................................... 51 Tabla 5.6: Resultados para el Caso B prohibido un aumento en el costo operacional .... 52 Tabla 5.7: Headways óptimos, utilizados y ajustados para el Caso B ............................. 54 Tabla 5.8: Resultados para el Caso B con frecuencias optimizadas ................................ 55 Tabla 5.9: Resultados para el Caso B con y sin frecuencias múltiplos de una base ........ 55 Tabla 5.10: Resultados para el Caso B con frecuencias mínimas .................................... 57 Tabla 5.11: Resultados para el Caso A amplificada la demanda ..................................... 63. v.
(7) ÍNDICE DE FIGURAS Pág. Figura 4.1: Algoritmo para la optimización del modelo .................................................. 28 Figura 5.1: Mapa de recorridos troncales nocturnos de Transantiago ............................. 36 Figura 5.2: Diagramas de las condiciones para la construcción de las rutas ................... 38 Figura 5.3: Recorridos y paradas usadas en la modelación ............................................. 42 Figura 5.4: Gráfico de los costos totales del Caso A ....................................................... 58 Figura 5.5: Gráfico de los costos totales del Caso B........................................................ 59 Figura 5.6: Gráfico de los costos de espera del Caso A ................................................... 60 Figura 5.7: Gráfico de los costos de espera del Caso B ................................................... 61 Figura 5.8: Gráfico de los costos asociados a la demanda para el Caso A ...................... 64 Figura 5.9: Paradas de los servicios 506 y 508 sobre la Avenida Grecia ........................ 65. vi.
(8) RESUMEN Es prácticamente imposible concebir un sistema de transporte público para una ciudad de gran tamaño en que los pasajeros no requieran hacer uno o más transbordos para llegar a su destino. Dado esto, será importante tratar de sincronizar los itinerarios de los distintos recorridos para prestar un buen servicio. Esto puede llegar a ser sumamente complejo si se tiene una fuerte estructura de red y múltiples transbordos en todas direcciones. No obstante, si se cuenta con la regularidad necesaria para tratar de predecir su comportamiento, se abre un sinfín de posibilidades para su modelación que pueden llevar a un sistema más conveniente y con una mejor calidad de servicio.. Diversos han sido los intentos por modelar redes de transporte público, muchos los conjuntos de variables consideradas y las metodologías de resolución. En esta investigación por primera vez se aplica y resuelve un modelo de programación matemática para un sistema de grandes dimensiones. Esto no solo optimizando los itinerarios de cada uno de los servicios sino que además considerando la reasignación de la demanda como consecuencia de las modificaciones que se imponen al sistema y la retención de buses en las paradas para facilitar los transbordos.. Como consecuencia de la modelación anterior no solo se consiguieron grandes ahorros en los tiempos de espera de los pasajeros sino que también disminuciones en los costos para el operador. Además se pudo mostrar que retener buses es positivo cuando las frecuencias de los servicios son bajas y/o la demanda es lo suficientemente alta. En definitiva, cuando los beneficios que ello le trae a los usuarios son comparables con los mayores costos que le trae al operador. Finalmente, también pudo verificarse empíricamente la validez de la sugerencia hecha por Knoppers y Müller (1995) respecto de que las frecuencias de los servicios presentes en una red deben ser todas iguales o al menos todas múltiplos de la más pequeña.. Palabras Claves: Transporte público, sincronización, itinerarios, retención. vii.
(9) ABSTRACT It is almost impossible to conceive a mass public transit system that doesn’t force the passengers to make one or more transfers when traveling from one place to another. Taking this into account, it will be important to try to synchronize the timetables of the different lines in order to provide a good quality of service. This can become extremely difficult with a strong network design and multiple transfers in different directions. Nevertheless, if the network counts with the appropriate regularity to be able to predict its behavior, a whole spectrum of possibilities arise for its modelling that might take to a system more convenient and that provides a much better quality of service.. Many have been the attempts to model public transit systems, many the variables that have been taken into account and many the methodologies of resolution. Within this investigation, a mathematical programming model has been applied and solved for the first time to a large scale system. This not only optimizing schedules but also synchronizing the different services considering the demand reassignment as a consequence of the changes made in the network and the possibility of holding the buses at the different stops in order to allow passengers to transfer properly.. As a consequence of the prior modelling there were not only achieved great improvements in the passengers waiting times but also in the operator’s costs. Additionally, it has been showed that holding buses can have good results when the headways between them and/or the demand are big enough. In addition, when the benefits that this provides to the users are comparable with the bigger costs attached to the operator. Finally, it has also been empirically proved the veracity of the suggestion made by Knoppers and Müller (1995) in terms of the benefits of using the same frequencies for all the services in a same network or at least all of them multiple of the smallest one.. Keywords: Public transport, synchronization, scheduling, itineraries, holding. viii.
(10) 1. 1.. INTRODUCCIÓN. Con el desarrollo sostenido que experimentan las grandes urbes, cada vez son mayores las exigencias para sus sistemas de transporte. Es así como, con el correr de los años, las principales ciudades del mundo han visto aumentada tanto su población como su superficie requiriendo con ello cada vez más servicios de transporte público y que cubran cada vez mayores distancias. Por otra parte, muchas de ellas han visto aumentado fuertemente su parque automotriz y con ello más exigida su red vial haciéndose indispensable la construcción de redes separadas para el transporte público que permitan asegurar los estándares de calidad de servicio requeridos por la población. Este es el caso no solo de las redes de metro sino que también el de las pistas o corredores exclusivos que han buscado dotar a los sistemas de transporte público de superficie de una mayor regularidad y de mayores velocidades de circulación.. Asimismo, es usual ver en las grandes ciudades demandas de viaje altamente distribuidas en tiempo y espacio. Lo anterior y ante la imposibilidad de prestar servicios entre cada par origen-destino, hace común ver diseños de redes de transporte público que imponen la realización de los viajes en más de una etapa con transbordos de pasajeros, entre dos o más líneas de uno o más medios de transporte. Los usuarios del transporte público hoy entienden esta situación, sin embargo, también ven como cada uno de estos transbordos puede incidir notoriamente en la calidad del servicio que se les presta y por ende, quieren no solo poder hacer sus viajes con la menor cantidad de transbordos posible, sino que también de manera expedita, sin tener que recorrer grandes distancias a pie ni tener que esperar largos instantes de tiempo entre una etapa y la siguiente. Así también y más allá de un diseño que permita lo anterior, los usuarios esperan tener las herramientas necesarias para poder planificar sus viajes con anticipación, saber con qué opciones cuentan, cuánto tiempo toma y qué implica utilizar cada una de ellas. Todo esto poniendo cada vez más exigencias para la incorporación de las tecnologías de la información al mundo del transporte..
(11) 2. De acuerdo a Ceder y Wilson (1986) el diseño de una red de transporte público contempla cinco etapas: (1) el diseño de los recorridos y sus paradas, (2) la elección de las frecuencias de cada línea en cada período, (3) la organización de los itinerarios de cada línea durante todo el período de planificación, (4) la asignación de los vehículos a cada servicio de cada línea y (5) la asignación de los conductores que permita trabajar el conjunto de servicios. De esta forma, mientras la primera etapa tiene un carácter eminentemente estratégico e influye directamente en las características de las distintas rutas que estarán disponibles para los usuarios, las etapas dos y tres tienen un carácter más bien táctico y tienen directa relación con los tiempos de viaje. Las etapas cuatro y cinco tienen una connotación operacional y no guardan relación con la experiencia del usuario sino que con la optimización de los recursos del operador.. De esta forma y particularmente en redes en que una proporción importante de los usuarios debe realizar al menos un transbordo durante su viaje y en períodos horarios en que los tipos de viaje en la red cuentan con una baja variabilidad, es posible no solo prefijar e informar a los pasajeros los horarios en que pasarán los distintos buses por las distintas paradas sino que también tratar de sincronizar los buses entre los que existirán transbordos. Es así como se puede no solo incentivar que la llegada de los pasajeros a la parada inicial de sus viajes se concentre en los instantes previos al arribo de los buses, sino que también hacer coincidir a los buses en los puntos de transbordo de modo que esas esperas sean también breves. Esto es especialmente atractivo cuando además se tienen frecuencias relativamente bajas como ocurre particularmente en los períodos nocturnos.. Justamente con el propósito de mejorar la sincronización entre los buses de distintas líneas, se han desarrollado hasta la fecha modelos que consideran tanto tiempos aleatorios (Chowdhury y Chien, 2002; Ting y Schonfeld, 2005) como tiempos determinísticos (Ceder y Tal, 2001; Wong y Leung, 2004; Ibarra-Rojas y Ríos-Solís, 2012) de viaje para los buses entre una parada y la siguiente. Particularmente para los.
(12) 3. modelos con tiempos aleatorios, se disponen instantes de salida que exigen a los buses en ciertos casos esperar en las paradas. Con ello se aumenta la probabilidad de que los usuarios logren realizar los transbordos sin tener que esperar el siguiente bus pero aumentando los costos tanto para el operador como para quienes ven retrasada su salida desde las paradas. Tanto en el caso de tiempos de viaje aleatorios como determinísticos se han postulado métodos matemáticos, heurísticos y metaheurísticos para su resolución pero siempre aplicados a sistemas pequeños y que no consideran aspectos que pueden llegar a ser importantes si se consideran sistemas de mayor envergadura. Específicamente, al considerar redes de mayor tamaño los usuarios dispondrán de diversas rutas para alcanzar un mismo destino. Adicionalmente, es posible que dos o más servicios puedan coincidir en parte de su recorrido aunque igualmente a veces con un conjunto de paradas diferidas que obligan a caminar para transbordar entre ellos.. En este contexto, al existir más de una ruta los usuarios podrían modificar su elección de viaje al sacar partido de transbordos crecientes. Esto es especialmente importante si se considera la posible existencia de más de un punto de transbordo entre un mismo par de líneas, lo que permitiría construir más de una ruta factible con la misma secuencia de servicios induciendo a los usuarios a transbordar en ciertas estaciones. Finalmente, el considerar que no siempre los transbordos se realizan bajando de un bus y subiendo a otro en la misma parada podría justificar retener a los buses en los paraderos incluso si se consideran tiempos determinísticos de viaje. Lo anterior con el fin de permitir el traslado a pie y bidireccional de los pasajeros entre una parada y la otra.. 1.1.. Objetivos generales. Los objetivos generales de esta tesis son:. i). Formular un modelo de programación matemática entero mixto que basado en el recorrido de cada línea, un tiempo de viaje entre cada par de paraderos consecutivos y una matriz de demanda entre paraderos de la red, permita.
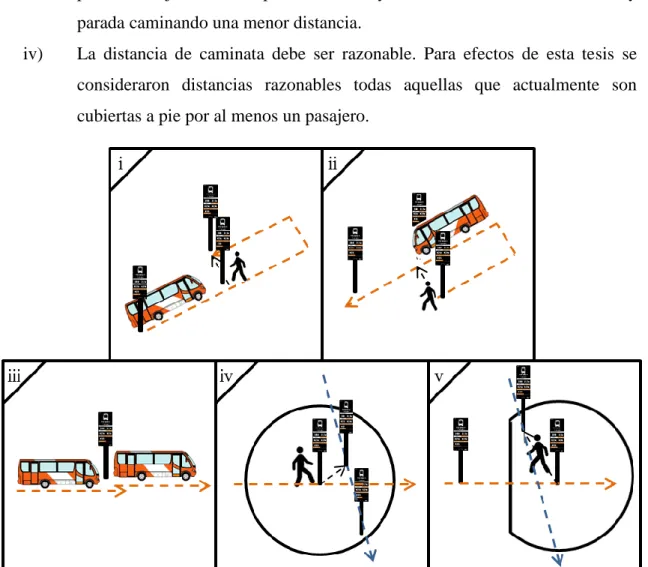
(13) 4. determinar la frecuencia y el itinerario para cada línea. El modelo debe representar adecuadamente la realidad de una red de buses de gran tamaño, es decir, una red en la que exista una cantidad importante de pares origendestino y de servicios que la recorren. Esta red de servicios deberá ofrecer distintas rutas posibles a un porcentaje importante de pasajeros. Asimismo, muchas de estas rutas deberán exigir a estos usuarios realizar un transbordo entre distintos buses para alcanzar el destino. Algunos transbordos requerirán caminatas a pie y en algunas partes al transbordar los pasajeros podrían sufrir retenciones dispuestas para reducir los tiempos de transbordo en la red. Así, el modelo debe permitir que la demanda entre un par origen-destino se distribuya entre las distintas rutas que lo sirven. ii). Proponer una metodología de resolución del modelo que permita identificar los instantes de llegada y de salida de cada parada y de cada uno de los buses del sistema minimizando su costo total, entendido este último tanto como el costo para los usuarios como el costo para el operador. Para ello se ha propuesto utilizar combinadamente algoritmos propios y métodos de resolución exacta por ser aquello que mostró tener las aptitudes necesarias para resolver satisfactoriamente el modelo propuesto.. iii). Aplicar y resolver el modelo en cuestión para la red de transporte público de Santiago de Chile denominada Transantiago. Esto particularmente para el período nocturno considerando sus características especiales de baja variabilidad en los tiempos de viaje y baja frecuencia.. iv). Proponer además de los nuevos itinerarios otras sugerencias que a partir de los resultados podrían resultar interesantes para la entidad a cargo de la coordinación de Transantiago y de otros sistemas hacia los cuales se podría extender la modelación. Entre ellas se propone la reubicación de las paradas de los servicios debido al impacto que podría generar en los resultados del modelo y en el costo total del sistema. Lo anterior con el propósito de acercar o eventualmente unificar paradas entre las que los pasajeros se desplazan.
(14) 5. caminando de manera de facilitar los transbordos y disminuir los posibles tiempos de retención.. 1.2.. Objetivos específicos. Los objetivos específicos en que se desglosan los objetivos anteriores son:. i). Identificar los supuestos que serán considerados para la modelación del problema. Lo anterior poniendo atención a las investigaciones previamente hechas en la materia y a los objetivos propuestos en esta oportunidad.. ii). Definir las variables de decisión que formarán parte del modelo, la forma de la función objetivo y las condiciones o restricciones que darán vida al modelo.. iii). Recabar y procesar los datos necesarios para aplicar el modelo al sistema de transporte público Transantiago. Estos datos se obtuvieron a partir de las transacciones realizadas con las tarjetas electrónicas con que se cancelan los pasajes en el sistema y de los GPS localizados en cada uno de los buses. Con ellos fue posible construir los parámetros definidos para la modelación.. iv). Resolver y optimizar el modelo aplicado a Transantiago realizando un análisis de sensibilidad de los resultados así como un análisis comparativo conducente a verificar los reales beneficios que se pueden obtener de ajustar el diseño actual de los itinerarios del sistema a los obtenidos a partir de la modelación.. En lo sucesivo, en la sección 2 se explicitan los detalles de la bibliografía revisada, en la sección 3 se plantea matemáticamente el modelo que se desarrolló y en la sección 4 se analiza la metodología de resolución utilizada. En la sección 5 se resuelve el modelo particularmente para el caso de Transantiago analizándose tanto las medidas de desempeño del sistema con su configuración actual como con los resultados obtenidos tras su modelación. Finalmente, en la sección 6 se presentan las conclusiones de este.
(15) 6. trabajo y se sugiere una serie de recomendaciones para futuras investigaciones en la materia..
(16) 7. 2.. REVISIÓN BIBLIOGRÁFICA. La coordinación de horarios de los servicios de transporte público se ha estudiado desde la segunda mitad de los años 70. No obstante, la mayor cantidad de publicaciones al respecto se han hecho durante los últimos 20 años, en su mayoría en torno a las dos líneas principales de investigación propuestas por Bookbinder y Désilets (1992). Una que buscar hacer coincidir a los buses en las paradas que tienen en común y otra que buscar minimizar los tiempos de espera de los pasajeros.. Desaulniers y Hickman (2007) presentan un estado del arte de los trabajos sobre diseño estratégico, táctico, operacional y control en tiempo real de sistemas de transporte público. En el documento, mientras a nivel estratégico colocan los trabajos relacionados con el diseño de la red y la asignación de la demanda, a nivel táctico sitúan los relacionados con la determinación de las frecuencias y de los itinerarios. Con esto dan un primer indicio de que estos últimos y las demandas suelen ser trabajados de manera aislada. Por su parte, Guihaire y Hao (2008) realizan una extensa revisión bibliográfica aportando con una nomenclatura común para los distintos subproblemas que nacen de la planificación estratégica y táctica de una red de transporte público. Los autores distinguen no solo a aquellos trabajos enfocados solamente en el diseño de la red, en la selección de las frecuencias o en la fijación de los itinerarios sino que también a aquéllos que intentan trabajar de manera conjunta las tres etapas o un subconjunto de dos de ellas. En cuanto a las metodologías de resolución utilizadas en la bibliografía revisada por los autores, destacan los métodos exactos cuando la formulación de los problemas lo permite, las heurísticas específicas y ad hoc a cada problema frecuentemente basadas en los principios del algoritmo codicioso (greedy), la búsqueda local con métodos como simulated annealing y búsqueda tabú, los algoritmos evolutivos como los genéticos y, finalmente, las metodologías híbridas que utilizan una combinación de dos o más de las anteriores..
(17) 8. A modo de ejemplo, Kim y Barnhart (1999) proponen una serie de modelos generalizados para el diseño de las redes de transporte público mientras que Klemt y Stemme (1988), Bookbinder y Désilets (1992) y Daduna y Voss (1995) resuelven un problema cuadrático de semi-asignación para fijar los itinerarios de los servicios en una red. Por su parte, lo mismo hacen Chakroborty et al. (1995, 1997 y 2001), Deb y Chakroborty (1998) y Jansen et al. (2002) pero utilizando un modelo de programación matemática no lineal entero mixto. Así también, el mismo tipo de problema resuelven Constantin y Florian (1995) pero para la fijación de las frecuencias de los servicios.. Entre los trabajos que intentan analizar y optimizar más etapas del proceso en su conjunto destacan los de Ceder et al. (2001), Eranki (2004), Fan y Machemehl (2004) y Borndörfer et al. (2005). De esta forma, mientras los dos primeros plantean un modelo lineal entero mixto para optimizar frecuencias e itinerarios, los dos últimos intentan determinar el mejor diseño y las mejores frecuencias para la red. Fan y Machemehl mediante un modelo no lineal entero mixto y Borndörfer et al. mediante un modelo de flujos con múltiples demandas. Este mismo tipo de modelo es el que plantean Yan y Chen (2002), esta vez para optimizar el diseño de la red, las frecuencias de los servicios y sus itinerarios, todo en conjunto.. En cuanto a los métodos utilizados para resolver y optimizar los distintos modelos, son variados los que se cuentan si se trata de determinar únicamente los mejores itinerarios pero bastante más reducidos los que se han utilizado si lo que se quiere es determinar lo anterior junto con las mejores frecuencias. Es así como, para encontrar los mejores itinerarios se cuentan métodos matemáticos o exactos (De Palma y Lindsey, 2001; Wong y Leung, 2004), heurísticas específicas y ad hoc que siguen algoritmos codiciosos (Klemt y Stemme, 1988; Castelli et al., 2004; Fleurent et al., 2004), métodos de búsqueda local como simulated annealing o búsqueda tabú (Daduna y Voss, 1995; Jansen et al., 2002), métodos evolutivos como los algoritmos genéticos (Chakroborty et al., 1995, 1997, 2001; Chakroborty, 2003; Cevallos y Zhao, 2006) e incluso métodos.
(18) 9. híbridos que combinan uno o más de los anteriores (Bookbinder y Désilets, 1992). En cambio, para optimizar frecuencias e itinerarios solo sobresalen métodos matemáticos (Koutsopoulos et al., 1985) y más recientemente algunos métodos heurísticos (Rapp y Gehner, 1976; Ceder et al., 2001; Eranki, 2004).. En particular en lo relacionado con la determinación de las frecuencias y de los itinerarios cabe destacar una serie de trabajos que sirvieron como antecedentes para esta investigación. Bookbinder y Désilets (1992), a partir del modelo propuesto por Klemt y Stemme (1988) y probablemente en uno de los primeros acercamientos al tema, optimizan el instante de inicio de su recorrido del primer bus de cada línea. Esto considerando cierta variabilidad en los tiempos de arribo a las paradas sucesivas pero de tal forma que los instantes de salida de los buses siguientes quedan dados estrictamente por el intervalo de diseño de cada línea. Para lo anterior utilizan una simulación que además considera una demanda fija previamente establecida, un conjunto dado y finito de horarios de salida para los buses desde sus puntos de partida y distintas funciones objetivo asociadas a costos de espera no lineales con respecto al tiempo y a la variabilidad de los mismos. Además no consideran tiempos de traslado a pie al transbordar. Con todo ello concluyen entre otras cosas que con headways parecidos y transbordos mayoritariamente bidireccionales son recomendables funciones de los costos de espera distintas de una función lineal. Así también, concluyen que mientras mayores sean los headways, menor sea la variabilidad en los tiempos de viaje de los buses y mayor sea la direccionalidad en los transbordos (más transbordos en una sola dirección), mayores serán los beneficios de la sincronización.. Por su parte, Knoppers y Müller (1995) analizan las posibilidades y limitaciones de sincronizar los buses de un sistema de transporte de tal forma que se faciliten los transbordos. Entre sus principales conclusiones cabe mencionar que una posible sincronización de los servicios solo tiene sentido si la desviación estándar de los instantes de arribo de los servicios que hacen de alimentadores en un punto de.
(19) 10. transbordo (en los que arriban los pasajeros) es menor al 40% del headway de los servicios que hacen de troncal (a los que abordarán los pasajeros).. Desde otro ámbito, Chakroborty et al. (1995) plantea un modelo de programación matemática no lineal entero mixto para sincronizar una serie de servicios entre los que se realizarían transbordos aunque todos en un mismo punto con lo que se pierde la estructura de red. Para ello, además de utilizar algoritmos genéticos, considera tiempos de retención para los buses en la estación de transbordo, llegadas determinísticas de los buses y arribos aleatorios de los pasajeros a la misma. Chowdhury y Chien (2002) por su parte, diseñan una red con una única línea principal y una serie de servicios desde y hacia los cuales los pasajeros pueden transbordar en cada una de sus paradas. De esta forma, mientras la primera presenta un servicio determinístico los segundos lo hacen de manera aleatoria. Así, determina los headways y los tiempos de retención apropiados para cada estación, todo mediante una heurística propia de cuatro etapas.. Paralelamente, Ceder et al. (2001) y Hall et al. (2001) también abordan el problema de la sincronización. Ceder et al. intenta maximizar el número de paradas coincidentes entre las distintas líneas que comparten una misma parada, esto sin hacer consideraciones de demanda. Para lo anterior define el problema primeramente con un modelo no lineal y luego con otro lineal entero mixto. Para resolverlo considera la posibilidad de variar el headway entra las distintas salidas de los buses y tiempos de viaje determinísticos además de utilizar un algoritmo propio que asegura finaliza en tiempo polinomial. Hall et al., por otro lado y considerando tanto aleatoriedad en los tiempos de viaje de los buses como la retención de los mismos, estudia la existencia de soluciones óptimas para la función que minimiza el tiempo total esperado de espera. Así, asegura que, estando los instantes de arribo de los buses que hacen de alimentadores distribuidos normal e idénticamente, siempre existirá al menos una solución óptima local y no de borde..
(20) 11. Tampoco haciendo consideraciones de demanda y usando como base el modelo de Ceder et al. (2001), Eranki (2004) intenta maximizar el número de coincidencias entre los buses que comparten paradas pero asumiendo que éstas ocurren siempre que sus arribos estén dentro de los márgenes de una misma ventana de tiempo. Por otra parte, Liu et al. (2007) incorpora pesos o ponderaciones a las coincidencias entre los distintos servicios, esto de manera de priorizar aquellos que pudiesen resultar de mayor interés. Además, para resolver el problema incorpora al algoritmo propuesto por Ceder et al. un método de búsqueda tabú. Ibarra-Rojas y Ríos-Solís (2012), por su parte, tampoco consideran la demanda. En cambio, también consideran que dos buses no necesariamente se encuentran sincronizados bidireccionalmente por cuanto los asumen sincronizados siempre que arriben dentro de una misma ventana de tiempo. Además, no solo buscan sincronizar los servicios sino que también separar aquéllos que tienen tramos importantes de sus recorridos en común. Lo anterior mediante un algoritmo propio.. Por otra parte, Ting y Schonfeld (2005), quizás en una mayor aproximación a esta investigación, consideran una red con múltiples servicios y múltiples puntos de transbordo entre uno y otro. Si bien no consideran tiempos de traslado al transbordar, sí consideran la posibilidad de retener los buses en las paradas pero producto de un modelo estocástico en tiempos de viaje. Así también, utilizan headways múltiplos de un intervalo base, una demanda fija previamente establecida y aleatoriedad en la llegada de los pasajeros. Para resolver el problema utilizan una heurística propia que podría conllevar un gran desafío si se quiere aplicar a una red de gran tamaño.. Desde otra perspectiva, Wong y Leung (2004) trabajan sobre una red ferroviaria específica. En este caso logran una muy detallada representación de la realidad del sistema al considerar todas sus variables pero para resolver el problema de programación matemática entero mixto que proponen relajan las variables binarias y discretas, resuelven el problema relajado y luego aproximan los resultados al entero más cercano..
(21) 12. Cevallos y Zhao (2006), por su parte, optimizan los tiempos de transbordo de un sistema a partir de una solución preexistente. Para ello y sin considerar cambios en las frecuencias, utilizan un algoritmo genético con el que proponen cambios graduales basados en pequeñas modificaciones.. De esta manera, si bien existen diversos trabajos en el área, son pocos aquéllos que han logrado incluir conjuntamente la determinación de mejores frecuencias con la optimización de los itinerarios de cada uno de los servicios. Menos aún son aquellos trabajos que han considerado además el tiempo que les toma a los pasajeros trasladarse a pie entre una parada y otra cuando el descenso de un bus y al ascenso al siguiente no se realiza en el mismo lugar. Si a eso agregamos la posibilidad de retener a los buses en las distintas paradas, el readecuar las rutas seguidas por los pasajeros en base a las modificaciones que se hagan al sistema y la consideración como función objetivo de los costos totales del sistema más allá del número de coincidencias logradas o del tiempo de espera de los pasajeros, estamos hablando de un problema que sigue presentando un gran desafío. Lo anterior más aún si se trata de aplicar a una red de grandes dimensiones debido a la escasez de trabajos que efectivamente lo han realizado..
(22) 13. 3.. FORMULACIÓN MATEMÁTICA. Durante el proceso de formulación del modelo matemático propuesto más adelante se pasó de un análisis continuo del tiempo a uno que supone la llegada de los pasajeros en instantes discretos. Esta es probablemente una de las mayores novedades introducidas en esta investigación y que no solo permitió ahorrarse el uso del cálculo diferencial e integral considerado en otros trabajos sino también pasar de un modelo no lineal entero mixto de gran complejidad de resolución a un segundo modelo entero mixto y linealizable que, consecuentemente, implicó menores esfuerzos computacionales para su optimización. Es así como, mientras en el primero se hacía necesario identificar cada uno de los buses y la cantidad de pasajeros abordando, descendiendo y transbordando entre cada uno de ellos junto con los tiempos de espera asociados a cada uno de dichos movimientos en las diferentes situaciones posibles (tener o no que esperar considerando que se puede llegar al paradero mientras el bus que se desea tomar está siendo retenido), en el segundo se identifican los diferentes costos asociados a cada una de las posibles rutas considerando el instante de tiempo en que se inicia el viaje por ellas. Para ello, fue necesario identificar los instantes de tiempo en que llegan los pasajeros y los buses a cada una de las paradas.. 3.1.. Supuestos del modelo. Los principales supuestos considerados al formular el modelo de programación matemática propuesto en esta tesis son:. i). Existe un conjunto de líneas prestablecidas donde cada una de ellas recorre un conjunto ordenado de paradas o nodos.. ii). Ninguna línea pasa más de una vez por las paradas que forman parte de su recorrido. Esta restricción obedece a las características propias del modelo pero puede ser fácilmente levantada si se suponen las detenciones en una misma parada como detenciones en paradas distintas separadas por una distancia nula entre sí..
(23) 14. iii). Todos los recorridos cuentan con una parada inicial en la que los buses parten vacíos y en las que consecuentemente solo es posible ascender y una parada final en la que necesariamente todos los pasajeros deben descender de los buses.. iv). Los buses prestan servicios en una única línea. De esta forma y entendiendo el tiempo de ciclo como el tiempo que le toma a un bus desde que inicia su recorrido hasta estar disponible para iniciarlo nuevamente, la flota de buses necesaria para prestar los servicios de cada línea corresponde al tiempo de ciclo divido por su headway. Esta restricción es prescindible si se toman las consideraciones necesarias para calcular adecuadamente los tiempos de ciclo, la flota de buses necesaria para operar cada uno de los servicios y con ellas los costos operacionales para el operador.. v). El costo operacional que enfrenta el operador por cada línea tiene una relación lineal con el número de buses necesarios para prestar el servicio y el tiempo durante el que se presta. Así también, está previamente establecido para cada línea independientemente de los buses que se utilicen para operarla o de otras variables que pudiesen alterar su valor.. vi). La demanda entre cada par origen destino es independiente del nivel de servicio que se preste.. vii). Los pasajeros tienen tanto por origen como por destino alguna de las paradas del sistema. Es decir, la matriz de demanda es una matriz parada-parada y no zona-zona o dirección-dirección. Así también, los pasajeros necesariamente abordan un bus en su parada de origen y descienden de uno en su parada de destino. En consecuencia, a los pasajeros solo les son útiles aquellas rutas que se inician en su origen y terminan en su destino no siendo posible, por ejemplo, caminar hasta otra parada cercana al origen para tomar el primer bus o bajarse en la última etapa de sus viajes en una parada cercana a la de destino..
(24) 15. viii). Los pasajeros llegan a las distintas paradas en que inician sus viajes en instantes de tiempo prestablecidos y de manera determinística.. ix). El número de pasajeros que esperan para abordar un bus nunca excede la capacidad disponible del mismo. Es decir, siempre es posible que aborde la totalidad de los pasajeros esperando.. x). Es necesario enumerar todas las rutas posibles para llegar de un punto a otro. Con poca congestión es esperable que existan pocas rutas atractivas entre cada par origen destino asignándose la demanda a la ruta menos costosa que lo una. Más específicamente, los pasajeros eligen sus rutas en base a los costos totales que experimentan por utilizar cada una de éstas. Este costo está compuesto por un costo de caminata, de viaje y de espera tanto en las paradas como a bordo de los buses. Además, es posible considerar una penalización adicional en el costo de cada ruta asociada al número de transbordos que implica.. xi). Los costos de caminata, de viaje y de espera tanto en las paradas como a bordo de los buses que experimentan los pasajeros son lineales con el tiempo transcurrido y dependen únicamente de éste (no hay caminatas, viajes o esperas más cómodas que otras).. xii). Las velocidades de caminata son las mismas para todas las personas mientras que las velocidades de circulación de los buses son iguales para todos los buses de una misma línea en un mismo tramo del recorrido.. xiii). Los buses circulan con perfecta regularidad, tienen llegadas y salidas determinísticas y cumplen en todo momento con los itinerarios previstos.. xiv). Los tiempos de detención de los buses en las paradas son fijos. Más específicamente, la cantidad de pasajeros que aborda o desciende en cada parada no altera los instantes previstos de salida y llegada de los buses en las paradas del recorrido.. xv). Los buses circulan en base a los itinerarios previstos que incluyen tiempos de viaje y parada conocidos. Más específicamente, la existencia o no de.
(25) 16. pasajeros que quieran subir o bajar del bus en una parada determinada no altera el cumplimiento de los itinerarios previstos. xvi). Los headways son homogéneos entre todos los buses de un mismo recorrido.. xvii). Los tiempos de retención son iguales para todos los buses de una misma línea en una misma parada de sus recorridos y en ningún caso superan al headway que los separa del bus que les sigue. En consecuencia, nunca existen dos buses de la misma línea detenidos en la misma parada.. xviii) Los servicios operan a lo largo de todo el período de planificación y con intervalos entre buses constantes a lo largo de este período.. 3.2.. Modelo matemático. Con respecto a la formulación del modelo matemático propiamente tal, fue necesario considerar los siguientes conjuntos de datos:. :. Conjunto de líneas.. :. Conjunto de nodos.. :. Conjunto de arcos (segmentos de línea).. :. Conjunto de nodos por los que pasan los buses de la línea .. :. Conjunto de arcos por los que circulan los buses de la línea .. :. Conjunto de nodos por los que pasan los buses de la línea. desde el. nodo inclusive hasta llegar al nodo exclusive. :. Conjunto de arcos por los que circulan los buses de la línea desde el inicio del recorrido hasta llegar al nodo .. :. Conjunto de todas las rutas posibles entre todos los pares de nodos.. :. Conjunto de todas las rutas posibles entre los nodos y .. :. Conjunto de líneas incluidas en la ruta .. :. Conjunto de nodos de subida y bajada incluidos en la ruta ..
(26) 17. :. Conjunto de nodos de subida incluidos en la ruta. (desde los que se. aborda un bus). :. Conjunto de nodos de bajada incluidos en la ruta. (en los que se. desciende de un bus). :. Conjunto de arcos incluidos en la ruta. entre el nodo de subida y el. siguiente nodo de bajada. :. Conjunto de intervalos de tiempo en los que llegan pasajeros al sistema.. Donde los intervalos de tiempo incluidos en. son intervalos mutuamente excluyentes y. están representados por el instante de tiempo en que finaliza el intervalo. Esto considerando todos los instantes de tiempo medidos en unidades de tiempo transcurridas desde un instante de referencia. .. Los parámetros del modelo están dados por:. :. Número de pasajeros que llegan al nodo. en el intervalo. queriendo. viajar al nodo . :. Tiempo de viaje de un bus de la línea por el arco .. :. Tiempo de reposicionamiento de los buses de la línea (tiempo que les toma trasladarse desde la última a la primera parada de sus recorridos).. :. Tiempo de caminata entre los nodos y .. :. Costo operacional de la línea .. ̅. :. Intervalo máximo de tiempo admitido entre los buses de la línea .. ̅. :. Último intervalo de tiempo en que llegan pasajeros al sistema.. :. Valor del tiempo de espera.. :. Valor del tiempo de espera a bordo de un bus.. :. Valor del tiempo de viaje..
(27) 18. :. Valor del tiempo de caminata.. :. Penalización en el costo experimentado por los usuarios que viajan por la ruta. Donde los costos. están expresados en unidades monetarias por bus y unidad de. tiempo y los valores , , unidad de tiempo.. debido al número de transbordos que ello implica.. y. están expresados en unidades monetarias por pasajero y. está expresado en unidades monetarias y bien podría expresarse. como un costo fijo por transbordo multiplicado por el número de transbordos que implica cada ruta.. Las variables de decisión por su parte están dadas por:. :. Intervalo de tiempo entre los buses de la línea .. :. Desfase de tiempo con respecto al instante de referencia. con que. inicia su recorrido el primer bus de la línea . :. Tiempo de retención de los buses de la línea en el nodo .. :. Número de pasajeros que habiendo llegado el sistema en el intervalo deciden viajar utilizando la ruta .. Finalmente, las variables auxiliares del modelo y que quedan expresadas en términos de los parámetros y las variables antes definidas según se detalla más adelante son:. :. Costo operacional del sistema.. :. Costo de caminata asociado a la ruta .. :. Costo de viaje asociado a la ruta .. :. Costo de viaje adicional (de espera a bordo de los buses) en que incurren los pasajeros que inician su viaje por la ruta. en el intervalo. producto de las retenciones que se aplican a los buses en que viajan..
(28) 19. :. Costo de espera en la parada iniciaron su viaje por la ruta. :. en que incurren los pasajeros que. en el intervalo .. Instante en que llega al nodo. la persona que, habiendo llegado al. sistema en el intervalo , decidió viajar por la ruta . :. Instante en que llega al nodo , el próximo bus de la línea esperada por quien, habiendo llegado al sistema en el intervalo , decidió viajar por la ruta . Lo anterior una vez que dicha persona alcanza dicho nodo.. :. Bus de la línea que abordará quien, habiendo llegado al sistema en el intervalo , decidió viajar por la ruta. (. indica que abordará el. -ésimo bus en iniciar su recorrido después del instante de referencia ). :. Tiempo de ciclo de la línea .. Definido lo anterior, es posible plantear la siguiente función objetivo en donde representa el costo total del sistema.. ∑∑. (. ∑. ). (3.1). De esta manera, el costo total queda expresado como el costo operacional del sistema sumado al costo que experimentan los pasajeros, éste calculado como la cantidad de pasajeros que inicia su viaje por cada una de las rutas posibles en cada momento multiplicado por el costo total asociado a ello. Esto es, la penalización en el costo de cada ruta asociada el número de transbordos, el costo asociado a la caminata necesaria para hacer cada uno de los transbordos, el costo de viaje asociado a las distancias recorridas, el costo de espera a bordo de los buses producto de la retención y el costo por esperar cada uno de los buses. Los tres primeros son independientes del instante en que se inician los viajes..
(29) 20. El costo operacional es independiente de la cantidad de pasajeros que utiliza el sistema o que viaja por cada una de las rutas, esto por cuanto se asume que los buses no ven alterados sus tiempos de viaje producto de la mayor o menor cantidad de pasajeros abordando o descendiendo en cada una de las paradas. Sin embargo, depende de los tiempos de ciclo de cada línea y estos a su vez de las demoras que estas puedan experimentar producto de las retenciones que se les apliquen en las paradas. De esta forma y habiendo asumido también que todas las líneas operan a lo largo de todo el horizonte de planificación, se puede calcular el costo operacional para cada línea como ̅ Donde. (3.2). corresponde al número de buses que será necesario utilizar para prestar el. servicio de cada línea . Luego, calculando el número de buses como el tiempo de ciclo dividido por el headway. y sumando para todas las líneas, se puede calcular el costo. operacional del sistema como ̅. ∑. (3.3). El costo asociado a la caminata que deben efectuar los pasajeros en cada uno de los transbordos se puede calcular para toda ruta ∑. Con. como (. (3.4). ). la parada siguiente a en el conjunto de nodos. . El costo asociado al tiempo. de viaje por cada ruta, en cambio, se puede calcular para toda ruta ∑ ∑. como (3.5). Esto utilizando en cada término la línea correspondiente a la etapa de viaje de la ruta que comienza en el nodo ..
(30) 21. El tiempo de espera por el próximo bus en cada una de las etapas de viaje consideradas en una ruta dependerá necesariamente del instante en que se inicia el viaje por dicha ruta. De esta manera, el costo asociado a dicho tiempo de espera para toda ruta para todo instante de inicio del viaje. y para todo nodo de espera. ,. se puede. calcular con las expresiones (. ). (3.6) (3.7). De esta forma, la desigualdad (3.6) será activa en caso que la persona llegue efectivamente a la parada antes de que lo haga el bus mientras que la expresión (3.7) será activa en caso contrario. Esto considerando que un pasajero podría eventualmente alcanzar a tomar un bus aun cuando éste llegue antes que él a la parada si éste es retenido en ella. En este punto, cabe reiterar la suposición hecha respecto de la discretización de la llegada de los pasajeros al sistema. Esto se traduce en que se considera que las personas que llegan al sistema en el intervalo , llegan al nodo en que inician su viaje al término de dicho intervalo, es decir, en el instante .. Finalmente, el tiempo de espera a bordo del bus producto de la retención de este en la parada en que es abordado se puede calcular como (3.8) De esta manera y nuevamente considerando siempre la línea correspondiente a la etapa de viaje que inicia en el nodo quien viaja por la ruta , en que el bus abordado abandona la parada mientras que. corresponde al instante corresponde al. tiempo total de espera, es decir, el tiempo hasta que llega el bus más el tiempo a bordo de este hasta que retoma el recorrido. Sumando a lo anterior el tiempo de retención en cada una de las paradas en que el bus se detiene a lo largo de la etapa de viaje y a su vez sumando para cada una de las etapas, se obtiene la siguiente expresión para el costo.
(31) 22. asociado a la espera a bordo de los buses válida para toda ruta de inicio del viaje. y para todo instante. .. ∑. ∑ (. (. ). (. (3.9) ). ). Esto nuevamente con la línea en cada término correspondiente a la etapa de viaje que inicia en el nodo quien viaja por la ruta .. Definido lo anterior, solo resta incorporar las siguientes restricciones. ∑. (3.10) (. (. ). ∑. (. (3.11) (. ). ∑ (. ) ). (3.12). (3.13) ). (3.14) ∑. Donde. ∑. (3.15). corresponde al primer nodo en el conjunto. anterior a la parada. en el conjunto. y. corresponde al nodo. . De esta forma, la restricción (3.10) asegura la. repartición de los pasajeros entre las distintas rutas posibles para cada par origen destino, las restricciones (3.11) y (3.12) asignan respectivamente los tiempos de llegada de los pasajeros a la primera y a las sucesivas paradas en que abordan un bus, la restricción (3.13) calcula los instantes de llegada de los buses a cada una de las paradas, la.
(32) 23. restricción (3.14) asegura que los pasajeros lleguen a las paradas antes de que salga el bus y la restricción (3.15) calcula los tiempos de ciclo de cada línea. Esto nuevamente considerando, particularmente en las restricciones (3.13) y (3.14), la línea correspondiente a la etapa de viaje asociada a cada instancia de las restricciones.. Luego y considerando finalmente las siguientes restricciones de signo e intervalo ̅. (3.16) (3.17) (3.18) (3.19) (3.20). Se tiene el modelo de programación matemática no lineal entero mixto definido por la función objetivo en (3.1) y las restricciones (3.3) – (3.7) y (3.9) – (3.20).. 3.3.. Características y tamaño del modelo. El modelo antes planteado es un modelo entero mixto por cuanto todas sus variables son continuas. Esto con excepción de la variable. que, por estar asociada al bus al que se. sube cada pasajero, es discreta. La función objetivo es no lineal pero convexa mientras que las restricciones son todas de carácter lineal salvo por las restricciones (3.3) y (3.13). Ahora bien, se mencionó anteriormente que el modelo que se plantearía sería no lineal pero linealizable, esto por cuanto cumple con la particularidad de volverse un modelo con restricciones lineales con solo dejar fijos los headways. Asimismo, la función objetivo también será lineal si se fijan las demandas asignadas en cada instante a cada ruta. Es así como, haciendo uso justamente de dicha particularidad para simplificar el trabajo computacional, se desarrolla la metodología de resolución del modelo planteada en la sección 4..
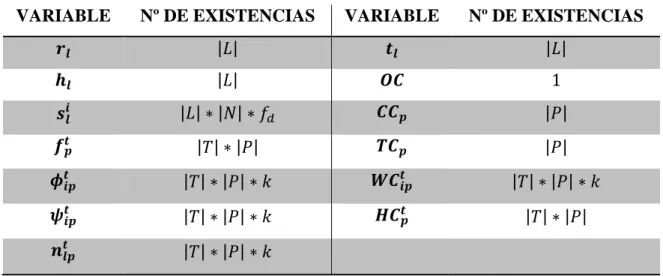
(33) 24. Con respecto al tamaño del modelo y principalmente para entender su dimensión, cabe analizar el número aproximado de variables y de restricciones que conlleva así como, particularmente, la razón de crecimiento de estas con el tamaño del sistema en estudio. Si denotamos como. el número de líneas, como. número de rutas y como. el número de nodos, como. el. el número de intervalos de tiempo que serán considerados. en la modelación, es posible estimar el número de cada una de las variables como se indica en la Tabla 3.1. Tabla 3.1: Estimación del número de variables del modelo VARIABLE. Donde. Nº DE EXISTENCIAS. VARIABLE. denota un factor de densidad de la red y. Nº DE EXISTENCIAS. denota una constante asociada al. promedio de etapas por viaje. A partir de esta información es posible visualizar la existencia de una relación algebraica entre el tamaño del sistema en estudio y el número de variables del modelo. Aun así cabe destacar la gran cantidad de rutas que se podría llegar a tener. Esto ya que, a modo de referencia y entendiendo que debe multiplicarse por un factor de corrección ligado a eliminar las rutas que podrían no ser del todo lógicas, el número de rutas es potencialmente del orden de. .. En relación con el número de restricciones y de manera análoga a lo anterior, en la Tabla 3.2 se muestran las estimaciones de sus cantidades..
(34) 25. Tabla 3.2: Estimación del número de restricciones del modelo RESTRICCIÓN. Nº DE INSTANCIAS. RESTRICCIÓN. (3.3). (3.13). (3.4). (3.14). (3.5). (3.15). (3.6). (3.16). (3.7). (3.17). (3.9). (3.18). (3.10). (3.19). (3.11). (3.20). Nº DE INSTANCIAS. (3.12) En esta oportunidad es posible observar nuevamente una relación algebraica entre el tamaño del sistema en estudio y el número de restricciones del modelo en donde la mayor preocupación debe radicar en el número de pares origen destino y en la cantidad de rutas posibles entre ellos..
(35) 26. 4.. METODOLOGÍA DE RESOLUCIÓN. Quak (2003) citando a Magnanti y Wong (1984) explica que la planificación de los sistemas de transporte público es un problema en extremo complejo y difícil. Esto por cuanto incluso los subproblemas en que lo dividen Ceder y Wilson (1986) considerados separadamente son, desde un punto de vista computacional, NP-Complejos.. Por otra parte, la sincronización de los servicios en una red de trasporte público es considerada en sí misma un problema difícil. No solo porque los transbordos se dan en todas direcciones sino también porque los servicios con los posibles transbordos entre sí conforman múltiples circuitos cerrados que estarán fuertemente interrelacionados. En consecuencia, sincronizar los buses que se detienen en un punto en particular y a partir de allí las detenciones en las paradas sucesivas muy probablemente generará descoordinaciones más adelante. Así también, mejorar la sincronización en un punto muy probablemente perjudicará la coordinación en otro.. Finalmente, el modelo propuesto además de buscar optimizar conjuntamente varios aspectos del sistema como lo son la demanda, las frecuencias y los itinerarios, se quiso aplicar a una red de grandes dimensiones considerando las características propias que estas presentan y con la gran cantidad de variables y restricciones que conllevan. Además, es un modelo en esencia no lineal entero mixto que en consecuencia presentó grandes dificultades para ser resuelto computacionalmente. No obstante y como se mencionó anteriormente, al fijar las frecuencias de cada uno de los recorridos se obtiene un modelo con restricciones lineales y función objetivo no lineal convexa. Así también, fijando las demandas de cada ruta en cada instante de tiempo se obtiene el modelo entero mixto completamente lineal definido por la función objetivo en (3.1) y las restricciones (3.3) – (3.7), (3.9), (3.11) – (3.15) y (3.17) – (3.20). Esto es, el mismo modelo original prescindiendo de las restricciones (3.10) y (3.16) relacionadas con las variables que pasan a ser parámetros (. y. ). Adicionalmente y debido a la fijación de las demandas,. los aportes al costo total que hacen los tiempos de caminata, los tiempos de viaje y las.
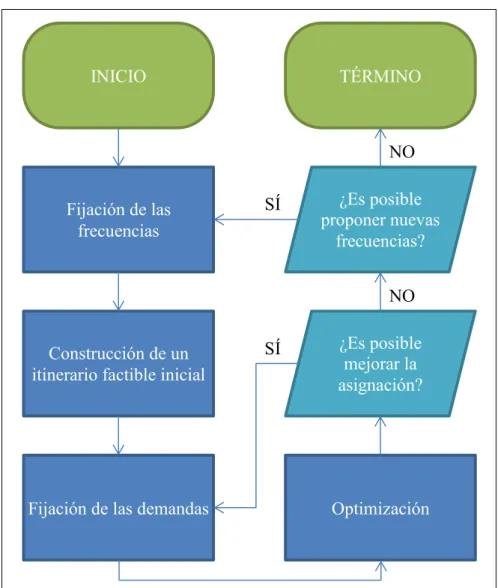
(36) 27. penalizaciones por transbordo pasan a ser fijos. En consecuencia, también es posible eliminar estos términos de la función objetivo y prescindir de las restricciones (3.4) y (3.5).. Cabe mencionar que fijar las frecuencias es razonable si se considera que en redes con baja demanda normalmente están dadas por el sistema y se fijan no en base a criterios de optimalidad sino en base a criterios de calidad de servicio. De esta forma y aprovechando la mayor simplicidad que el modelo alcanzado conlleva para su resolución, se utilizó para resolver el problema el algoritmo iterativo que se detalla a continuación y que se resume en la Figura 4.1..
(37) 28. INICIO. TÉRMINO. NO Fijación de las frecuencias. SÍ. ¿Es posible proponer nuevas frecuencias? NO. Construcción de un itinerario factible inicial. SÍ. Fijación de las demandas. ¿Es posible mejorar la asignación?. Optimización. Figura 4.1: Algoritmo para la optimización del modelo. 4.1.. Algoritmo para la optimización del modelo. El algoritmo utilizado para la optimización del modelo propuesto es el que se plantea a continuación.. i). FIJACIÓN DE LAS FRECUENCIAS Se determinan y fijan las frecuencias a ser utilizadas en la próxima iteración del algoritmo. Dichas frecuencias pueden ser las frecuencias vigentes en el sistema de manera previa a su optimización u otras que se quieran proponer..
(38) 29. ii). CONSTRUCCIÓN DE UN ITINERARIO FACTIBLE INICIAL El modelo, para una mejor y más rápida optimización, requiere de un itinerario factible inicial. Dicho itinerario se puede encontrar en todos los casos fijando las variables según se indica a continuación.. Esto es, todas las líneas tienen un bus iniciando su recorrido en el instante de referencia. y los tiempos de retención en todas las paradas son nulos.. En consecuencia, los instantes de salida de los buses de todas las líneas desde las paradas en que inician sus recorridos quedan dados por. con. y. los instantes de llegada y salida desde el resto de las paradas de sus recorridos quedan dados por. ∑. también con. . Así. también, a partir de lo anterior y de manera inequívoca quedan determinados los tiempos de ciclo de cada una de las líneas y el costo operacional.. iii). FIJACIÓN DE LAS DEMANDAS A partir de un itinerario factible previo, esto es, los instantes de llegada y salida de los buses desde cada una de las paradas es posible encontrar la mejor ruta posible entre todos los pares origen-destino y para todos los instantes posibles de llegada de los pasajeros. Lo anterior minimizando el costo total percibido por ellos. De esta manera, en esta etapa del algoritmo, ya sea a partir del itinerario factible inicial o de los itinerarios obtenidos tras la última iteración, se asigna la demanda que se origina en cada instante por cada par origen-destino a la ruta con menor costo que lo une.. Es importante mencionar que a la hora de asignar las demandas a las rutas con menores costos deben considerarse todos sus componentes, es decir,.
(39) 30. también los costos asociados a los tiempos de caminata, los tiempos de viaje y las penalizaciones por transbordo aun cuando estos hayan podido ser eliminados de la función objetivo.. iv). OPTIMIZACIÓN Habiéndose fijado las frecuencias y las demandas así como dado un itinerario factible anterior, es posible intentar optimizar el modelo con alguno de los algoritmos de resolución exacta disponibles en el mercado. De esta manera se sincronizan los itinerarios de la mejor manera posible desfasando los instantes de salida de los buses de cada línea y modificando los tiempos de retención en cada una de las paradas. Para efectos de este trabajo se utilizó CPLEX sobre la base de ILOG AMPL 11.0. Todo esto corriendo en un servidor Linux con 16GB RAM.. Notar que el óptimo que se encuentra es necesariamente un óptimo global para esta instancia debido a que se está optimizando un problema completamente lineal y por ende convexo. Por otra parte el costo total social se reduce dado que la solución previa es factible para este problema y el propósito del modelo es justamente minimizar los costos.. v). MEJORA EN LA ASIGNACIÓN Dado que el modelo fue optimizado manteniendo fija la asignación de la demanda, es posible que tras la optimización llevada a cabo en el paso anterior, las rutas sobre las cuales fueron asignadas las demandas ya no sean las con menor costo para llegar del origen al destino que sirven. De serlo estamos en una solución óptima al menos para las frecuencias en estudio por lo que solo es factible pasar al paso vi) y analizar la posibilidad de estudiar nuevas frecuencias. De no serlo, es posible reasignar las demandas a las rutas con menor costo debiéndose volver al paso iii)..
(40) 31. Notar que con esto se obtiene una solución global igualmente factible pero con un costo total del sistema menor respecto de la solución anterior. Esto dado que los costos operacionales se mantienen mientras que los costos para los usuarios caen.. vi). PROPUESTA DE NUEVAS FRECUENCIAS Habiéndose alcanzado un óptimo para las frecuencias en estudio durante las últimas iteraciones del algoritmo solo cabe preguntarse si acaso es razonable optimizar el sistema para un conjunto distinto de frecuencias de los servicios y probar así si acaso puede conseguirse una solución mejor. De bastar con las soluciones previamente obtenidas se está en condiciones de finalizar el algoritmo mientras que, de querer hacer nuevas iteraciones con otras frecuencias, se debe volver al paso i).. Con respecto a la búsqueda de nuevos conjuntos de frecuencias, si bien no podemos asegurar que ellos necesariamente conlleven una mejor solución, sí se pueden proponer inteligentemente algunas alternativas. Si suponemos un caso base en que los servicios funcionan de manera perfectamente regular pero sin ningún tipo de sincronización entre las distintas líneas, sin ningún tipo de retención en las paradas y sin hacer públicos los itinerarios de los buses, podemos suponer que los tiempos de espera de los pasajeros se regirán, en promedio, en todas las etapas de viaje según la fórmula propuesta por Larson y Odoni (1981), esto es. ̅̅̅̅̅. (4.1). Luego, considerando la expresión (3.2) para calcular el costo operacional asociado a cada línea. y reescribiendo la flota necesaria para operar la línea. como. podemos escribir el aporte al costo total del sistema hecho por cada línea pasajeros que la abordan en función del headway de dicha línea como. , y los.
(41) 32. ̅. Donde. (4.2). corresponde a la demanda total de pasajeros que abordan dicha línea,. corresponde a la suma de los costos en que incurren dichos pasajeros por caminar para abordar la línea ,. corresponde a la suma de los costos asociados al viaje a bordo de. los buses de dicha línea de cada uno de los pasajeros y. corresponde a la suma de las. penalizaciones por transbordo que pagan los pasajeros que utilizan la línea .. Dado que la demanda se encuentra previamente asignada. ,. y. no dependen de. las frecuencias de los servicios. Luego, derivando la expresión (4.2) con respecto a. se. obtiene. ̅. Luego, el headway óptimo para cada línea. (4.3). dadas las demandas y demás condiciones. del caso base antes descrito, queda dado por. √. ̅. (4.4). Con lo que se tiene un primer conjunto de frecuencias distintas de las previamente vigentes que podrían ser probadas durante el desarrollo del algoritmo. En todo caso, la pertinencia de estas frecuencias dependerá de la demanda que se tenga por cuanto en un sistema o período con baja demanda, las frecuencias que se le exigirán al operador probablemente distarán muchísimo de las que se podrían considerar óptimas. En dicho caso, los resultados que se obtengan igualmente sirven de pauta para establecer, aunque en otro orden de magnitud, las frecuencias de uno y otro servicio.. Además de lo anterior, se aconseja revisar a Ting y Schonfeld (2005) quienes sugieren para obtener mejores resultados normalizar las frecuencias de los distintos servicios de manera que pasen por las distintas paradas con intervalos iguales de tiempo. De esta.
(42) 33. forma y a partir de las frecuencias obtenidas previamente, se propone igualar todas aquellas frecuencias que sean relativamente similares y fijarlas todas de tal forma que sean múltiplos enteros de la frecuencia más pequeña..
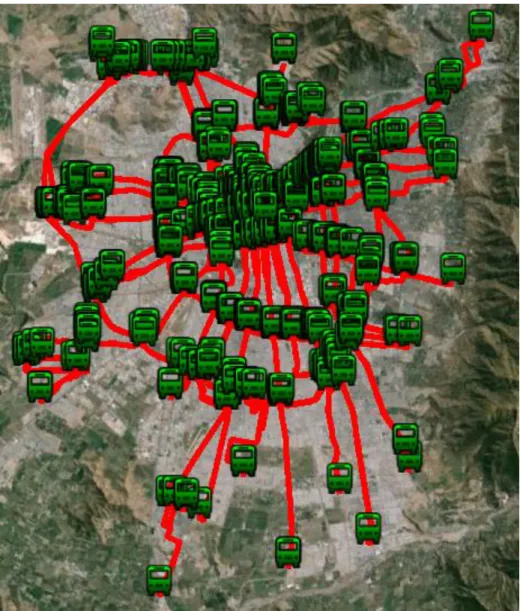
(43) 34. 5.. APLICACIÓN AL TRANSANTIAGO. Transantiago es el nombre que recibe el sistema de transporte público de la ciudad de Santiago de Chile. Este fue puesto en marcha el mes de febrero del año 2007 y, si bien ha sufrido una serie de cambios en sus años de funcionamiento principalmente enfocados en mejorar algunos incentivos hacia los operadores, permitió migrar entre dos sistemas muy diferentes. Por una parte, el sistema antiguo estaba sumamente atomizado y desregulado, los servicios se prestaban con buses muy antiguos, los conductores trabajaban bajo condiciones laborales inapropiadas y se daban bajas frecuencias en los períodos de menor demanda y locas carreras en las calles por captar a los pasajeros en los períodos punta. Transantiago, en cambio, incorporó buses modernos y administrados por solo unos pocos operadores, con recorridos estructurados sobre una red articulada por el metro y basada en una serie de servicios troncales y locales donde los primeros atraviesan la ciudad y los segundos alimentan a los primeros. Asimismo, se incorporó el pago mediante tarjetas electrónicas y junto con esto la integración tarifaria consiguiendo no solo disminuir el número de asaltos a los conductores para quitarles su recaudación sino que, principalmente, facilitar los transbordos que pasaron a formar parte indiscutible del viaje de cualquier santiaguino.. Por esto último es que Transantiago es un excelente sistema para aplicar el modelo desarrollado en esta tesis. De acuerdo a la información proporcionada por el Directorio de Transporte Público Metropolitano (2013), el sistema operó durante el año 2012 sobre una superficie de 680 kilómetros cuadrados con 6.298 buses que recorrieron 470 millones de kilómetros. Lo anterior prestando el servicio en 374 recorridos que en su conjunto cubrían 2.766 kilómetros de red vial con 11.165 paradas. En cuanto al número de transbordos, el año 2012 se realizaron 1.685 millones de transacciones con un promedio de 3.184.289 transacciones por día laboral. Además, del total anual anterior, 596 millones correspondieron a combinaciones, es decir, se operó con un promedio de 1,55 transacciones o etapas por viaje..
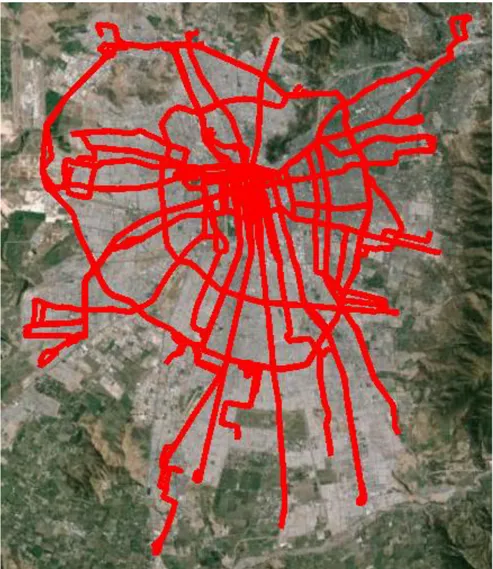
(44) 35. Ahora bien, aun cuando Transantiago cuenta una importante y creciente red de corredores segregados y vías exclusivas, es particularmente en el período nocturno en el que se enfocará el estudio. Esto por presentar una frecuencia considerablemente menor en los servicios y una baja variabilidad en los tiempos de viaje que no se logra durante el día. Por lo mismo, es en este período donde se puede conseguir una coordinación efectiva, con retenciones relativamente bajas y donde el efecto en el nivel de servicio es más notorio.. 5.1.. Construcción de la base de datos. Durante la noche el servicio de Metro no opera, en cambio, sí lo hacen 58 de los 374 recorridos de buses, 26 de ellos siendo servicios troncales y los restantes 32 alimentadores (ver Figura 5.1). En su conjunto cubren un total de 4.747 paraderos que se ven reducidos a 2.855 si se consideran solo aquellos servidos por las líneas troncales. Estos últimos originan un universo de potenciales pares origen-destino cuyo orden de magnitud probablemente puede ser estimado como la mitad de 2.855*(2.855–1), esto es 4.074.085. Para efectos de este trabajo y con el propósito de reducir en alguna medida el tamaño del problema, solo se consideraron los servicios troncales. Esta simplificación resulta razonable si se considera que los headways de los servicios alimentadores son un 42% mayor al headway promedio de los servicios troncales, que estos transportan una demanda considerablemente menor y tienen recorridos significativamente más cortos en muchos casos con un único punto de transbordo que los hacen fácilmente tratables de manera independiente como una etapa posterior a la coordinación de la red troncal..
(45) 36. Figura 5.1: Mapa de recorridos troncales nocturnos de Transantiago Para armar con la información disponible la base de datos necesaria para optimizar el modelo, se incurrió en una serie de supuestos y simplificaciones. Más específicamente, se calcularon las distancias geográficas entre cada par de paradas y se supusieron una velocidad promedio de viaje de los buses de 31 km/h (Coordinación General de Transportes de Santiago, 2011) y una velocidad promedio de caminata de las personas de 5 km/h. A partir de lo anterior se estimaron los tiempos de viaje en bus entre cada par de paradas consecutivas, los tiempos de reposicionamiento y los tiempos de caminata en que incurriría una persona para trasladarse a pie entre los distintos nodos del sistema..
Figure

+7


Documento similar