Ingeniería inversa a los componentes programables (FPGA EP1C12Q240I7N) y DSP de la tarjeta T223
58
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Ingeniería inversa a los componentes programables (FPGA EP1C12Q240I7N) y DSP de la tarjeta T223. Autor: Cadete Yadier Abadía Casas [email protected]. Tutor: Tte. Cor MSc Ing. Félix Enrique Gomara Tristá [email protected]. Santa Clara 2014 "Año 56 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “… el enemigo es sumamente vil. Cabalga sobre los instintos, las ambiciones y las vanidades de aquellos en los que nunca germinó una elemental ética… el lado débil del enemigo imperialista es creer que con el hombre físico ha liquidado su pensamiento, sus ideas, ha liquidado sus virtudes y ha liquidado su ejemplo…”.
(5) ii. DEDICATORIA. A mis padres, porque son el ejemplo que guía mi vida.. A mi abuela Raquel, por todo su cariño, su fe, sus años, su vida, dedicada a mí. A toda mi familia, por ser tan especiales, por quererme siempre, confiar en mí, y enseñarme a crecer.. A mis amigos, los de lejos y los de cerca, los de ayer y los de hoy, los grandes y los chiquitos, los blancos y los negros, a todos, porque muy por encima de todo, está su amistad..
(6) iii. AGRADECIMIENTOS. A mis amigos Armandito, Oscarito, Javier, Jorgito y Humberto. A mis compañeros de aula Yosmaykel, Iván y Ernesto por considerarlos amigos. A Yenny por nunca fallarme, estar en cada momento que la necesité y darme su amor infinito. A mi tutor Gomara por brindarme su amistad y ayudarme en la realización de este trabajo. A todos los profesores que han contribuido en mi formación hasta los días de hoy. A Pierrat porque sin su ayuda no hubiera sido posible la realización de este trabajo..
(7) iv. TAREA TÉCNICA Revisión bibliográfica sobre los procesos de Ingeniería inversa a Software y Hardware, así como revisar sobre la existencia de alguna metodología o procedimiento para realizar ingeniería inversa al Hardware programado. Identificación de las entidades programadas y sus enlaces con las entradas y salidas.. Estudio del programa fuente de los sistemas programados en la tarjeta (T223).. Determinación de las características del sistema cuyas funciones se encuentran programadas en la T223, prestando atención a la forma de realizar la determinación del centro energético de las señales.. Elaboración del informe final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN La incesante evolución de la tecnología en estos tiempos, el constante y creciente uso de dispositivos electrónicos, ha desembocado en el desconocimiento de su principio de funcionamiento. Durante el presente trabajo se pretende realizar un proceso de asimilación por Ingeniería Inversa de la programación dentro de la T223 apoyándose en el diseño y evaluación de una metodología, que a pesar de estar orientada a dicha tarjeta, es utilizable a cualquier equipo diseñado mediante lenguajes de descripción de hardware. Un análisis detallado sobre el tema permitirá sustituir una tecnología obsoleta, sin el inconveniente de realizar grandes inversiones..
(9) vi. ÍNDICE. INTRODUCCIÓN ............................................................................................................................... 1 CAPÍTULO 1. Características generales de la Estación de Conducción de Artículos (ECC) S125MIA “Pechora”............................................................................................................................................. 4 1.1. El Complejo “PECHORA” ........................................................................................... 4. 1.2. La Estación de Conducción de Artículos (ECC) S125MIA ............................................ 4. 1.2.1. Composición ................................................................................................................. 4. 1.2.2. Esquema funcional ........................................................................................................ 7. 1.2.3. Dinámica del funcionamiento ........................................................................................ 8. 1.3. Características de los FPGAs ...................................................................................... 11. 1.3.1. Aplicaciones ............................................................................................................... 11. 1.3.2. Características de los FPGAs Cyclone I ...................................................................... 11. 1.4 1.4.1. Lenguaje de Descripción de Hardware de Alta Velocidad ........................................... 12 Procedimiento de diseño ............................................................................................. 14. 1.5. Lenguaje de Descripción de Hardware de ALTERA ................................................... 15. 1.6. Procesador digital de señales ....................................................................................... 15. 1.6.1. Arquitecturas estándar en DSP .................................................................................... 16. 1.6.2. Evolución.................................................................................................................... 16. 1.6.3. Aplicaciones ............................................................................................................... 17. CAPÍTULO 2. Tarjeta (T223). Funcionalidad dentro del complejo PECHORA ................................. 18 2.1. Tarjeta (T223), esquema funcional .............................................................................. 18.
(10) 2.1.1. vii Funcionamiento .......................................................................................................... 19. 2.1.2. Dispositivo de medición de las coordenadas (DDC) .................................................... 19. 2.1.3. Dispositivo de elaboración de los mandos (DEM) ....................................................... 20. 2.1.4. Esquema físico ............................................................................................................ 21. 2.2. Proceso de ingeniería inversa ...................................................................................... 21. 2.3. Code Composer Studio (CCS)..................................................................................... 23. 2.3.1 2.4 2.4.1. Flujos de trabajo ......................................................................................................... 23 Software Altera Quartus® II para componentes programables FPGAs ........................ 24 Módulos ejecutables .................................................................................................... 25. CAPÍTULO 3. Ingeniería inversa a los algoritmos implementados en la FPGA y DSP pertenecientes a la T223............................................................................................................................................... 26 3.1. Análisis del proyecto de Quartus correspondiente a la FPGA de la T223 ..................... 26. 3.2. Bloque 485_project ..................................................................................................... 27. 3.3. Bloque new_dsp.......................................................................................................... 28. 3.4. Análisis del DSP de la T223 ........................................................................................ 30. 3.4.1 3.5. Análisis de las matemáticas para la formación de los mandos K1 y K2 ....................... 31 Centro energético de la señal ....................................................................................... 35. CONCLUSIONES Y RECOMENDACIONES .................................................................................. 39 Conclusiones .................................................................................................................................. 39 Recomendaciones........................................................................................................................... 40 REFERENCIAS BIBLIOGRÁFICAS ................................................................................................ 41 ANEXOS ........................................................................................................................................... 42 Anexo I. Forma de la exploración del espacio............................................................................... 42. Anexo II Señales reflejadas de los objetos. ................................................................................... 43 Anexo III Indicador saturado por interferencias. ............................................................................ 43 Anexo IV Diagrama general de un FPGA. .................................................................................... 44.
(11) viii Anexo V Enlace eléctrico entre el DSP y la FPGA. ..................................................................... 44 Anexo VI Puesto de antenas de la ECC S125MIA. ....................................................................... 45 Anexo VII Forma de representar las señales en el indicador. ......................................................... 45 Anexo VIII Manivelas para acompañar al objetivo. ........................................................................ 46.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. En nuestro país se cuenta con Sistemas de Vigilancia Aéreos, no obstante, la utilización de estos se encuentra limitada debido a que la tecnología con que están implementados es aun analógica. Durante estos años el país ha adquirido Estaciones de Vigilancia relativamente modernas con tecnología ya digitalizada, dichas estaciones han demostrado en la práctica una apreciable mejoría en comparación con las que poseía el país, debido e esto ha surgido la necesidad de realizar un proyecto de renovación tecnológica, entre los sistemas más importantes a los que se les está aplicando la modernización se encuentra el Complejo Coheteril “Pechora”. De la adquisición de varias tarjetas diseñadas con electrónica digital programada surge la necesidad de realizar un trabajo de documentación descriptiva, donde queden planteadas las principales características y el modo de operación de la nueva tecnología adquirida. En el transcurso de la Segunda Guerra Mundial, nace la ingeniería inversa, cuando los ejércitos enemigos incautaban insumos de guerra como aviones u otra maquinaria de guerra para mejorar las suyas mediante un exhaustivo análisis. La situación de estudio es un caso particular de análisis y rediseño, que se fundamenta en diversos aspectos del producto original y es necesaria su ejecución pues el proceso de diseño y la documentación original no están disponibles (López, 2010). Específicamente en este trabajo se hará referencia a la T223, realizando observaciones en el dispositivo de medición de las coordenadas (DDC) y dispositivo de elaboración de los mandos (DEM).En dicha tarjeta se encuentra una componente programable FPGA del tipo CYCLONE I (EP1C12Q240I7N) y un DSP del tipo TMS320C6713PYPA. Una FPGA (Field Programmable Gate Array) es un dispositivo semiconductor que contiene bloques de lógica, cuya interconexión y funcionalidad pueden ser configuradas mediante un lenguaje de descripción especializado (VHDL, AHDL, ABEL, Verilog, etc.). La lógica programable puede reproducir desde funciones tan sencillas como las llevadas a cabo por una puerta lógica o un sistema combinacional hasta complejos sistemas en un chip (SOPC)..
(13) INTRODUCCIÓN. 2. Altera es uno de los pioneros de la lógica programable, siguiendo a líderes notables anteriores como Signetics y MMI en la introducción de dispositivos electrónicos. Actualmente Altera desarrolla algunas características que están orientadas hacia capacidad de sistemas en chips programables (SOPC). Algunos de los ejemplos más recientes incluyen memorias embebidas, procesadores embebidos, y transceptores de alta velocidad. Quartus II, es una herramienta CAD dirigido al diseño y simulación de circuitos lógicos, la cual ofrece grandes facilidades, en cuanto a ahorro de tiempo y recursos se refiere, ya que evita el gasto innecesario de componentes a la hora de comprobar un diseño determinado y acelera la puesta en marcha del mismo al ofrecer mediante simulaciones, su funcionamiento evitando llegar a la implementación física del circuito sin antes haber comprobado su correcto funcionamiento. Además este software brinda un ambiente amigable y fácil de trabajar, tanto para el usuario inexperto como para el usuario avanzado. Teniendo en cuenta lo anterior, en el presente trabajo se plantea el siguiente problema de investigación: ¿Cómo obtener el funcionamiento de la tarjeta T223 a partir de su código fuente ubicado en sus dos componentes programables: un FPGA del tipo CYCLONE I (EP1C12Q240I7N) y un DSP del tipo TMS320C6713PYPA para su futura modificación? La investigación tiene como objeto de estudio el código fuente del componente programable FPGA CYCLONE I (EP1C12Q240I7N) y el DSP del tipo TMS320C6713PYPA de la T223 y el campo de acción lo constituye la obtención del funcionamiento de la misma para su futura modificación y desarrollo en la DAAFAR. Para dar respuesta al problema de investigación se propone como objetivo general: Obtener por ingeniería inversa la funcionalidad del código fuente del componente programable FPGA del tipo CYCLONE I (EP1C12Q240I7N) y el DSP del tipo TMS320C6713PYPA de la T223 para su futura modificación. Partiendo del objetivo general se derivan los siguientes objetivos específicos: . Obtener las características de los FPGA y los Lenguajes de Descripción de Hardware para conocer sus peculiaridades.. . Investigar sobre el funcionamiento de las dos componentes programables de la tarjeta: la FPGA del tipo CYCLONE I (EP1C12Q240I7N) y el DSP del tipo TMS320C6713PYPA.. . Familiarizarse con los procedimientos que se utilizan para realizar la ingeniería inversa de sistemas programados en FPGA..
(14) INTRODUCCIÓN. . 3. Realizar un estudio del programa fuente del sistema programado en la T223 así como la identificación de las entidades programadas y sus enlaces con las entradas y salidas.. De los objetivos específicos surgen las siguientes interrogantes científicas: . ¿Qué procedimientos de ingeniería inversa escoger para obtener el funcionamiento de la T223 a partir del código fuente?. . ¿Cómo determinar las características del sistema cuyas funciones se encuentran programadas en la T223, prestando atención a la forma de realizar la determinación del centro energético de las señales?. . ¿Qué características poseerán los FPGA, así como los Lenguajes de Descripción de Hardware utilizados en su programación?. El informe de la investigación se organiza de la siguiente forma: resumen, introducción, capitulario, conclusiones y recomendaciones, referencias bibliográficas y anexos. En el Capítulo 1 se abordan las características generales de los FPGA y del Lenguaje descriptivo de hardware tanto VHDL como de ALTERA empleados en la programación del FPGA del tipo CYCLONE I (EP1C12Q240I7N) y del DSP del tipo TMS320C6713PYPA incluidos en la T223, así como se presentan procedimientos empleados en la realización de ingeniería inversa de software. Posteriormente en el Capítulo 2 se caracteriza la T223, a partir del dispositivo FPGA del tipo CYCLONE I (EP1C12Q240I7N) y del DSP del tipo TMS320C6713PYPA, dado que su aseguramiento matemático debe encontrarse programado en la T223.Y finalmente en el Capítulo 3 se realizará un estudio del programa fuente del sistema programado en la T223. La identificación de las entidades programadas y sus enlaces con las entradas y salidas así como la determinación de las características del sistema prestando atención a la forma de realizar la determinación del centro energético de las señales. Consecutivamente aparecen las Conclusiones y Recomendaciones, y las Referencias Bibliográficas; además de los Anexos para concluir la visión que se quiere facilitar acerca de los disímiles temas tratados a lo largo del trabajo..
(15) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 4. CAPÍTULO 1. Características generales de la Estación de Conducción de Artículos (ECC) S125MIA “Pechora” En este capítulo se describen las características fundamentales de la Estación de Conducción de Artículos (ECC), los sistemas de indicación de objetos en movimiento así como también las peculiaridades de los FPGAs del tipo CICLONE I y del DSP del tipoTMS320C6713PYPA. 1.1. El Complejo “PECHORA”. El objetivo principal que cumple una unidad de defensa antiaérea es lograr una alta efectividad del fuego contra los medios de agresión del enemigo, pudiéndose alcanzar los siguientes resultados (González, 2006). Aniquilamiento de los medios de agresión del enemigo. Desorganizar los órdenes combativos de los medios de ataque aéreo del enemigo (MAAE). Destruir las unidades aéreas del enemigo que cumplen las misiones de rescate de pilotos y tripulantes derribados. Disminuir la efectividad del empleo del armamento de los MAAE. Evitar, limitar o dificultar los aseguramientos a las tropas enemigas. 1.2. La Estación de Conducción de Artículos (ECC) S125MIA. La ECC se destina para la búsqueda, seguimiento y aniquilamiento de los objetivos aéreos, en los rangos de bajas y medias alturas, tanto de día como de noche y excepcionalmente de los objetivos navales y terrestres, en los regímenes de radio localización o televisión (Pierrat, 2013) 1.2.1 Composición La ECC está compuesta por: Cabina de dirección, compuesta a su vez por: Dispositivo sincronizador. Dispositivo de indicadores. Dispositivo de dirección de las antenas y las rampas de lanzamiento (SUPA-RL). Monitores del sistema teleóptico (STO). Dispositivo de medición de las coordenadas (DDC)..
(16) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 5. Dispositivo de elaboración de los mandos (DEM). Dispositivo radiotransmisor de los mandos (DTM). Dispositivo de selección de los objetos móviles (SOM). Dispositivo demodulador de las interferencias. (GSHN). Dispositivo automatizado de lanzamiento (DAL). Dispositivo de imitación y control. Puesto de antenas compuesto por: Sistema transmisor. Sistema receptor. Sistema de antenas y guías de ondas (SAGO). Sistema de los mandos de fuerza de seguimiento sincrónico (MFSS). Cámara del sistema teleóptico (STO). La ECC posee dos canales de trabajo: radiolocalización y televisión. En el canal de radiolocalización posee dos regímenes de exploración del espacio aéreo: localización (LOC) y acompañamiento (ACOMP), siendo el último el que se emplea para el tiro. En el régimen LOC se transmiten los impulsos de sondeo y se reciben las señales reflejadas por la antena UV10 (es la antena cuyo reflector es un paraboloide seccionado con el irradiador ubicado en la prolongación del brazo hacia el frente) cuyo diagrama explora o barre en 10° de abajo hacia arriba. En régimen ACOMP la transmisión de los impulsos de sondeo se realiza por la antena UV10, que detienen el barrido de su diagrama y lo convierte en un cono fijo y la recepción se realiza por las antenas UV10 y UV11 (son las antenas que parecen rectangulares y se encuentran inclinadas a los lados de la UV10). Las antenas UV11 desplazan el diagrama direccional, de manera electromecánica en 15 grados. La señal del artículo entra siempre por la UV11. El régimen de LOC se usa para la localización de objetivos aéreos a distancias hasta 80 km, así como para la localización de objetivos de superficie (terrestre o marítima) y para la localización de objetivos portadores del CAR (Cohete Anti Radar). La antena UV10 es transmisora y receptora, moviendo su diagrama direccional (en forma de aguja de 1,5°) desde abajo hacia arriba. La antena UV11 es solo receptora moviendo su diagrama direccional en los planos inclinados Ф1 y Ф2, comenzando por Ф1 desde la posición abajo a la izquierda hasta la.
(17) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 6. posición arriba a la derecha y luego continúa por Ф2, desde la posición arriba a la izquierda hasta la posición abajo a la derecha. El sector que cubre el solapamiento por el cruce de los barridos de Ф1 y Ф2 es el sector de exploración de la antena UV11 (cuadrado dibujado en azul). (Ver anexo I). El sector que cubre la antena UV12 describe un círculo en el espacio (dibujado en verde). El centro de este círculo se denomina bisectriz del sector de exploración. El centro del barrido que describe la entena UV10 recibe el nombre de directriz del sector de exploración. En caso de que los blancos sean portadores de interferencias e impidan la localización y el seguimiento del blanco se emplea el canal tele óptico, siempre y cuando el objetivo se pueda ver por este medio. El canal de televisión posee dos regímenes de exploración: campo visual ancho (Foco F-150) 60 diagonalmente y campo visual estrecho (Foco F-500) 20 diagonalmente. En F-500 se tiene el diagrama de exploración que se muestra en la figura 1.1, en la parte izquierda. Se utiliza en los casos de localización de objetivos a distancias mayores de 18 km y para el seguimiento del objetivo durante el tiro. En F-150 tiene el diagrama de exploración que se muestra en la figura 1.1, pero en la parte derecha. Se utiliza durante la localización de objetivos a distancias menores de 18 km .. Figura 1.1 Canal teleóptico. El régimen de ACOMP se emplea para el tiro y permite: Actuar contra objetivos de pequeña SER (superficie efectiva de reflexión). Actuar contra objetivos de grandes dimensiones. Actuar contra objetivos en grupo. Actuar contra objetivos del tipo ADA (aerostatos automáticos a la deriva). Actuar contra objetivos portadores de interferencias activas y pasivas..
(18) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 7. En régimen de localización, la antena UV10 realiza el movimiento de diagrama de manera continua, y por lo tanto la señal que entra por la antena toma la forma o se modula por dicho diagrama. Esto hace que la forma de la señal, sumando todos los impulsos reflejados y recibidos en la ECC durante cada barrido del diagrama sea acampanada. A esta señal se le da el nombre de “paquete de impulsos”. Esto mismo ocurre con la señal que se recibe por la antena UV11. En el caso del régimen de acompañamiento cuando la antena UV10 detiene el barrido, la señal que se recibe por ésta no está modulada y su forma la componen todos los impulsos que se reciben que tienen igual amplitud. A esta señal se le da el nombre de “fila de impulsos” (Pierrat, 2013). 1.2.2 Esquema funcional En la Figura 1.2 se muestra el esquema funcional de la ECC S125MIA “Pechora”: En este esquema se muestran los diferentes dispositivos que componen la ECC S125MIA señalando las tarjetas que realizan las funciones en dichos dispositivos (Pierrat, 2013).. Tarjeta 223. Figura 1.2 Esquema funcional de la Estación de Conducción de Artículos..
(19) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 8. 1.2.3 Dinámica del funcionamiento La dinámica de funcionamiento del complejo comienza cuando hay un objetivo violador del espacio aéreo, que es localizado por alguno de los radares de la guardia combativa. A partir de esto el puesto de mando de la unidad superior (PM) designa el grupo que debe derribarlo y ordena localizarlo y destruirlo. Una vez transmitidas las coordenadas del objetivo la unidad pasa a “Posición 1”, momento en el cual se conectan la ECC y las RL. La conexión de la ECC se realiza “a distancia” y durante el tiempo que se realiza el calentamiento los transmisores, se realiza un control de funcionamiento en el cual se comprueba, mirando los indicadores, el trabajo del sincronizador, del SUPA, del DAL, del DDC, del DEM y de parte del DTM (cifrador y descifrador). La presencia de trama en los indicadores significa el buen trabajo del sincronizador; el movimiento de las antenas al mover las manivelas indica el trabajo correcto del SDARL; la presencia de las marcas y valores del DAL (límites de la zona, punto de encuentro, velocidad, altura y parámetro) indican un trabajo correcto de este sistema. Así mismo, el paso a seguimiento automático (SA) del objetivo imitado y la captura de los artículos imitados indican el correcto paso de las señales por los canales del receptor; la magnitud de los errores y el valor de los mandos de dirección indican el correcto funcionamiento del DDC, del DEM y de parte del DTM. A todo esto se le llama “control funcional de la ECC en baja frecuencia”. Después de transcurrir los 2 min de calentamiento de los transmisores aparecen los ruidos en la pantalla de los indicadores señalizando el trabajo de la parte de alta frecuencia de los receptores. A partir de ese momento se considera elevada la alta tensión en los receptores y se puede elevar la alta tensión de los transmisores. Cuando se eleva la alta se pasa el conmutador “antena – equivalente” a la posición “antena” y se comprueba que aparezcan los objetos locales (señales reflejadas de las lomas, edificios, nubes, etc.) y si hay un objetivo en el aire aparecerá también. Con esto se termina el control de funcionamiento y se informa si el complejo está listo o no para cumplir la misión de combate. Inmediatamente debe recibirse la información sobre las coordenadas del objetivo, desde el PM, que a partir de ahora es un objetivo para el complejo. Con estos datos se orientan las antenas hacia la dirección indicada y se conecta “antena”, en el régimen de LOC para localizar el objetivo. La localización del objetivo se logra observando los indicadores (los monitores) y tratando de diferenciar los objetos móviles dentro del cúmulo de objetos fijos observados en las pantallas. (Ver anexo II). Se observa una imagen de la pantalla del monitor, estando la ECC en régimen de.
(20) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 9. localización, en la cual se muestran las señales reflejadas de los objetos locales (montañas, nubes, edificios, etc.) al irradiar hacia una dirección determinada. Hay que tener en cuenta que la antena UV10 explora de abajo hacia arriba en una magnitud de 10 grados; por lo tanto, en esta imagen, el borde izquierdo del indicador es la parte inferior del barrido (la tierra), y el borde derecho representa la parte superior del barrido. El espacio entre el borde izquierdo y derecho representa los 10° de exploración. El espacio longitudinal desde el borde inferior del indicador hasta el borde superior representa la distancia. Hay que notar que en el centro del indicador aparece una marca vertical, la cual coincide con el centro del barrido de la antena UV10, siendo esta la directriz del sector de exploración. Por ejemplo, la mancha alargada que está en medio de la imagen de la izquierda quiere decir que hay un gran objeto, muy parecido a un barco que se encuentra a una distancia dada. Hay que notar que ese objeto coincide con la línea de objetos locales que coincide con la superficie del terreno. La imagen de la derecha, es algo similar pero en régimen de acompañamiento y por el plano Ф2. En este caso el espacio entre los bordes derecho e izquierdo de la pantalla representa la exploración por ese plano que es de 15° . El espacio entre los bordes inferior y superior sigue siendo aquí la distancia. En este caso la marca vertical no aparece en el centro del indicador, sino desplazada hacia la derecha, lo que es típico en la exploración por el plano Ф2. Para este plano la marca representa la directriz del sector y por la forma del barrido la parte derecha del indicador está relacionada con el terreno (Pierrat, 2013). Si la presencia de los objetos locales afecta a la detección de los objetivos o existen interferencias pasivas lanzadas por el enemigo (objetos metálicos muy pequeños y en grandes cantidades que flotan en el aire y reflejan las OEM) entonces se conecta el dispositivo SOM (T318) para eliminar los objetos inmóviles y detectar con mayor facilidad los objetivos. Cuando se localiza al objetivo se pasa al régimen de acompañamiento por “seguimiento manual” (SM) por los operadores Ф1, Ф2 y distancia. Si el seguimiento es estable y si no tiene interferencias se pasa a “seguimiento automático con acompañamiento manual” (SA-AM) o “seguimiento automático con acompañamiento automático” (SA-AA). Seguidamente se conecta el DAL, implementado en la computadora, y se observan los datos de velocidad (V), altura (H) y parámetro (P), de vuelo del objetivo con relación a la ECC; esto es, para escoger el método de conducción teledirigida del artículo y escoger el método de accionamiento de la carga de combate. También se observan las marcas del DAL y cuando la marca de “distancia hasta el punto de encuentro” (PE) esté dentro del espacio limitado por la marca de “distancia hasta el límite.
(21) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 10. lejano” (LL) y por la marca de “distancia hasta el límite cercano” (LC), se procede a informar que el objetivo está en “zona de lanzamiento” y se espera por la orden de fuego (Pierrat, 2013) Para efectuar el fuego existen dos canales de dirección de los artículos; esto quiere decir, que pueden dirigirse dos artículos a la vez contra un mismo objetivo. Cuando se da la orden de fuego se realiza el lanzamiento por uno de los canales y un tiempo después se realiza el lanzamiento por el otro canal. Al efectuar el lanzamiento por uno de los canales, el artículo sale de la RL y vuela sin dirección hacia la zona de captura. En esa zona debe aparecer el artículo en la pantalla del monitor y el sistema prepara al receptor y se prepara al DDC para capturar su señal, lo que se evidencia en la pantalla porque se le pega una marca denominada “estrobo” en la parte inferior de la señal del artículo. A partir de aquí el artículo vuela con los mandos que se forman en el DEM y que se transmiten desde el DTM. De esa manera transcurre el vuelo del artículo hacia el objetivo y cuando este último entra dentro del radio de acción de la carga combativa que lleva el artículo, se produce la explosión, originándose un flujo de fragmentos, precedidos por una onda expansiva que viaja en dirección hacia el objetivo. La onda expansiva, la densidad de fragmentos y el efecto rompedor de estos últimos, son los miembros de una integral de probabilidad que generalmente produce la destrucción del objetivo. Este es, en apretada síntesis, el trabajo de la ECC y del Complejo (Pierrat, 2013) Hay una tarea que está relacionada también con la T424, y parte de una problemática existente a la hora de realizar el acompañamiento a un blanco en régimen de TV. Como ya se dijo antes, en el caso de que los blancos lancen interferencia dirigidas hacia las antenas del complejo, dichas interferencias que generalmente es un ruido blanco con una densidad espectral de potencia superior a los 3 kw por MHz, estas entrarán por las antenas saturando completamente al receptor y por tanto la señal del objetivo quedará escondida dentro de ese efecto en las pantallas de los indicadores, razón por la cual no se podrá localizar. En el anexo III se muestra un indicador cuando hay interferencias activas ruidosas. Es significativa la brillantez de las bandas de interferencias en la pantalla del indicador, predominando la intensidad en la dirección donde se encuentra el objetivo portador de dichas interferencias, lo que anula completamente las posibilidades del receptor e impide la localización y el seguimiento del objetivo. (Ver anexo III) Ante esta situación, en la cual los indicadores se encuentran saturados de ruido y se hace imposible seguir al objetivo, hay que emplear el sistema teleóptico, que no es más que una cámara de TV con un teleobjetivo de características especiales montada junto al sistema de antenas y un monitor situado en el puesto de trabajo del operador dentro de la cabina de dirección..
(22) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 1.3. 11. Características de los FPGAs. Los FPGA son dispositivos lógicos que tienen la facilidad de ser programados directamente por el usuario, requiriéndose para ello de herramientas de costo relativamente bajo. A diferencia de lo que normalmente se conoce como sistema programado (microcontrolador, microprocesador, etc.) en donde un hardware fijo, limitado por el número de núcleos disponibles, es capaz de interpretar y ejecutar un programa especificado como un conjunto de instrucciones; sin embargo, en los FPGA lo que se tiene es un hardware que lleva a cabo diferentes operaciones de manera paralela, pues se configura realizando conexiones físicas que son especificadas por un programa o cadena de configuración. Cada tarea de procesos independientes se asigna a una sección dedicada del chip y puede ejecutarse de manera autónoma sin ser afectada por otros bloques de lógica. Como resultado, el rendimiento de una parte de la aplicación no se ve afectado cuando se agregan otros procesos. Los FPGA se programan a través de Lenguajes de Descripción de Hardware (HDL). (A. et al., 2008). Cada chip FPGA está compuesto de un número finito de recursos predefinidos con interconexiones programables para implementar un circuito digital reconfigurable. Posee una estructura interna formada por una matriz de bloques lógicos configurables CLB (Configurable Logic Block) que se comunican entre sí y con los bloques de entrada/salida (Input/Output Block, I/OB) a través de canales de ruteo o interconexión horizontales y verticales(Maxfield, 2004). (Ver anexo IV) 1.3.1 Aplicaciones Cualquier circuito de aplicación específica puede ser implementado en un FPGA, siempre y cuando este disponga de los recursos necesarios. Las aplicaciones donde más comúnmente se utilizan los FPGA incluyen a los DSP (procesamiento digital de señales), radio definido por software, sistemas aeroespaciales y de defensa, prototipos de ASICs, sistemas de imágenes para medicina, sistemas de visión para computadoras, reconocimiento de voz, bioinformática, emulación de hardware de computadora, entre otras. Se puede señalar que su uso en otras áreas es cada vez mayor, sobre todo en aquellas aplicaciones que requieren un alto grado de paralelismo (Instruments, 2008). 1.3.2 Características de los FPGAs Cyclone I Las densidades van desde 2910 a 20060 Les y disponen de hasta 288 kbs de memoria integrada. Dispositivos de ciclón se basan en un proceso de SRAM 1,5 V de todas las capas de cobre, optimizado para la máxima capacidad de la lógica en el costo más bajo..
(23) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 12. Con hasta dos bucles fase-lock (PLL) por dispositivo y una estructura jerárquica de reloj, oferta Ciclón FPGA un extenso circuito de administración de reloj on-y off-chip para diseños complejos. Cada dispositivo de ciclón está integrado con circuitería dedicada para la interfaz con alto rendimiento de datos única externa tasa (SDR) SDRAM y doble velocidad de datos (DDR) SDRAM y dispositivos de memoria FCRAM. Dispositivos Cyclone soporta una variedad de estándares de E / S de una sola terminal-como LVTTL, LVCMOS, PCI, y SSTL-2/3, y tener hasta 129 canales de interfaces de E / S compatibles LVDS, cada uno capaz de funcionar a 311 Mbps Como complemento de los dispositivos de ciclón, Altera también ofrece dispositivos de configuración de serie de flash especializado, con los precios para aplicaciones de volumen a menos de 10 por ciento del dispositivo de ciclón correspondiente. La versión 3.0 del Nios con procesador incorporado es totalmente compatible con la familia de dispositivos Ciclón. El procesador Nios toma ventaja de multi-master switch fabric Avalon ™ simultánea de Altera, e incluye la instrucción personalizada capacidades y soluciones avanzadas de depuración. Por un precio tan bajo como $ 2 para la lógica necesaria para integrar un procesador Nios y sus periféricos en el dispositivo de ciclón más pequeño, los diseñadores pueden tener una 32 bits, 50 Dhrystone MIPS RISC procesador que es menos costoso que la mayoría de los microprocesadores o microcontroladores independientes (Pierrat, 2013). 1.4. Lenguaje de Descripción de Hardware de Alta Velocidad. EL VHDL nace como un proyecto del Departamento de Defensa (DoD) de EEUU para disponer de una herramienta estándar independiente para el modelado (simulación), descripción y documentación de los sistemas electrónicos. Posteriormente el Instituto de Ingenieros Eléctricos y Electrónicos (IEEE) lo adopta y estandariza. En este lenguaje se pueden realizar descripciones a circuitos con un alto nivel. En VHDL, la interfaz del dispositivo a desarrollar con el exterior recibe el nombre de entidad (entity) y la descripción de su funcionalidad es lo que se denomina su arquitectura (architecture). La interfaz del dispositivo tiene como objetivo definir qué señales son visibles desde el exterior y se denominan puertos (ports). En la arquitectura se definen las acciones que se realizan sobre los datos introducidos a través de los puertos de entrada a fin de obtener los datos que serán transmitidos hacia los puertos de salida..
(24) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 13. El VHDL incorpora elementos básicos que pueden definirse dentro de la sección process (proceso). Un proceso puede entenderse como un conjunto de sentencias que describen el comportamiento de un determinado elemento, de tal forma que el código que contiene dicho proceso se ejecuta de manera secuencial. Sin embargo, todos los procesos contenidos en una descripción VHDL se ejecutarán de forma paralela. El VHDL cuenta con la posibilidad describir circuitos con diversos niveles de abstracción. Posee sentencias de control de flujos como if, for y while. Tiene la capacidad de estructurar el código en subprogramas, funciones o procedimientos, lo que permite afrontar algoritmos complejos. Utiliza y desarrolla bibliotecas de diseño, es decir, incorpora conceptos específicos para el modelado del hardware como la concurrencia. Un proyecto de VHDL puede contener muchos ficheros. El código VHDL usualmente se encuentra en los ficheros con extensión. Dentro del VHDL hay varias formas con las que podemos diseñar el mismo circuito y es tarea del diseñador elegir la más apropiada (Güichal, 2005). Funcional: se describe la forma en que se comporta el circuito. Esta es la forma que más se parece a los lenguajes de software ya que la descripción es secuencial. Estas sentencias secuenciales se encuentran dentro de los llamados procesos en VHDL. Los procesos son ejecutados en paralelo entre sí, y en paralelo con asignaciones concurrentes de señales y con las instancias a otros componentes. Flujo de datos: describe asignaciones concurrentes (en paralelo) de señales. Estructural: se describe el circuito con instancias de componentes. Estas instancias forman un diseño de jerarquía superior, al conectar los puertos de estas instancias con las señales internas del circuito, o con puertos del circuito de jerarquía superior. Mixta: combinación de todas o algunas de las anteriores. En VHDL también existen formas metódicas para el diseño de máquinas de estado, filtros digitales, bancos de pruebas etc..
(25) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 14. 1.4.1 Procedimiento de diseño El primer paso del diseño consiste en la construcción del diagrama en bloque del sistema. En diseños complejos como en software los programas son generalmente jerárquicos y VHDL ofrece un buen marco de trabajo para definir los módulos que integran el sistema y sus interfaces, dejando los detalles para pasos posteriores. El segundo paso es la elaboración del código en VHDL para cada módulo, para sus interfaces y sus detalles internos. Como el VHDL es un lenguaje basado en texto, se puede utilizar cualquier editor para esta tarea, aunque el entorno de los programas de VHDL incluye su propio editor de texto. Después que se ha escrito algún código se hace necesario compilarlo. El compilador de VHDL analiza este código y determina los errores de sintaxis y chequea la compatibilidad entre módulos. Crea toda la información necesaria para la simulación. El próximo paso es la simulación, el cual le permite establecer los estímulos a cada módulo y observar su respuesta. El VHDL da la posibilidad de crear bancos de prueba que automáticamente aplica entradas y compara las salidas con las respuestas deseadas. La simulación es un paso dentro del proceso de verificación. El propósito de la simulación es verificar que el circuito trabaja como se desea, es decir es más que comparar entradas y salidas. En proyectos complejos se hace necesario invertir un gran tiempo en generar pruebas que permitan evaluar el circuito en un amplio rango de operaciones de trabajo. Encontrar errores en este paso del diseño es mejor que al final, en donde hay que repetir entonces una gran cantidad de pasos del diseño. Hay dos dimensiones a verificar: Su comportamiento funcional en donde se estudia su comportamiento lógico independiente de consideraciones de tiempo como las demoras en las compuertas. Su verificación en el tiempo, en donde se incluye las demoras de las compuertas y otras consideraciones de tiempo como los tiempos de establecimiento (set-up time) y los tiempos de mantenimiento (hold time). Después de la verificación sé está listo para entrar en la fase final del diseño. La naturaleza y herramientas en esta fase dependen de la tecnología, pero hay tres pasos básicos. El primero es la síntesis que convierte la descripción en VHDL en un conjunto de componentes que pueden ser realizados en la tecnología seleccionada. Por ejemplo con PLD se generan las ecuaciones en suma de productos. En ASIC genera una lista de compuertas y un netlist que especifica cómo estas compuertas.
(26) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 15. son interconectadas. El diseñador puede ayudar a la herramienta de síntesis especificando requerimientos a la tecnología empleada, como el máximo número de niveles lógicos o la capacidad de salida que se requiere. En el siguiente paso de ajuste (fiting) los componentes se ajustan a la capacidad del dispositivo que se utiliza. Para PLD esto significa que acopla las ecuaciones obtenidas con los elementos AND – OR que dispone el circuito. Para el caso de ASIC se dibujarían las compuertas y se definiría como conectarlas. En él último paso se realiza la verificación temporal ya que a esta altura es que se pueden calcular los elementos parásitos como las capacidades de las conexiones. Como en cualquier otro proceso creativo puede ser que ocasionalmente se avance dos pasos hacia delante y uno hacia atrás (o peor). 1.5. Lenguaje de Descripción de Hardware de ALTERA. Este lenguaje es un paso intermedio entre los lenguajes de bajo a alto nivel de abstracción o complejidad. El mismo está pensado para diseños de lógica combinacional compleja, operaciones de grupo, máquinas de estado y tablas de verdad (Noriega, 2008). AHDL, al igual que otros HDL, utiliza ecuaciones lógicas, variables, constantes, funciones, operadores aritméticos, tablas de verdad y expresiones condicionales. Es un lenguaje modular y concurrente que utiliza el modo “behavioral” para describir la lógica que se desee implementar. Además, está especialmente orientado para definir máquinas de estado de gran complejidad y toda la descripción del comportamiento es resuelta en forma concurrente (Corporation, 1996). Se puede utilizar cualquier editor de texto para crear archivos de diseño de texto en AHDL. Las únicas restricciones que presentan estos ficheros deben guardarse con la extensión .tdf (Text Design File), y que las líneas no deben exceder los 255 caracteres. Asimismo, AHDL no es case sensitive, o sea, no diferencia entre mayúsculas y minúsculas (Corporation, 1996). A continuación se realizará una descripción de las partes que componen un archivo de texto en AHDL (Betz, 2010). 1.6. Procesador digital de señales. Un procesador digital de señales o DSP es un sistema basado en un procesador o microprocesador que posee un conjunto de instrucciones, un hardware y un software optimizados para aplicaciones que requieran operaciones numéricas a muy alta velocidad..
(27) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 16. 1.6.1 Arquitecturas estándar en DSP Las arquitecturas de los computadores actuales están comúnmente clasificadas como RISC's (Reduced Instruction Set Computers) y CISC's (Complex Instruction Set Computers). Estos últimos tienen un gran número de instrucciones sumamente poderosas, mientras que la arquitectura RISC posee pocas instrucciones y realiza movimientos de datos entre registros en un ciclo de máquina. Hoy en día los computadores RISC comienzan a reemplazar a los CISC's, porque se puede alcanzar un más alto rendimiento por medio del uso de un eficiente compilador como a través de la ejecución de instrucciones simples en forma ordenada. DSP's estándars tienen mucho rasgos de una arquitectura tipo RISC, aunque son procesadores de propósitos específicos cuya arquitectura está especialmente diseñada para operar en ambientes de alta necesidad de cálculo. Un DSP estándar ejecuta varias operaciones en paralelo mientras que un RISC usa unidades funcionales altamente eficientes que pueden iniciar y completar una instrucción simple en uno o dos ciclos de reloj. 1.6.2 Evolución En 1978, INTEL lanzó el 2920 como un “procesador analógico de señales”. Este poseía un chip ADC/DAC con un procesador de señales interno, pero no poseía un multiplicador de hardware, el 2920 no tuvo éxito en el mercado. En 1979, AMI lanza el S2811, que fue diseñado como un microprocesador periférico, al igual que el 2920 no tuvo gran éxito en el mercado. En el mismo año, Bell Labs introduce el primer chip procesador digital de señales (DSP), The Mac 4 Microprocessor. Luego en 1980 fueron presentados en el ISSCC80 los primeros DSP completos: el PD7710 de NEC y el DSP1 de AT&T, ambos procesadores fueron inspirados en las investigaciones de PSTN telecomunicaciones. En ese mismo año NEC comenzó la producción del PD7710, la primera producción de DSP completos en el mundo. En 1982, TI introduce el TMS32010, el primer DSP de punto fijo en la familia de los TMS320. Antes de finalizar el año la revista Electronics Products premió el TMS32010 con el título de ``Producto del Año´´(Instruments, 2004). Este entró a competir directamente con los microcontroladores de 8-16 bits que había en el mercado. Otros dispositivos con los que competían eran los microprocesadores de propósito general..
(28) CAPÍTULO 1. CARACTERISTICAS GENERALESDE LA ESTACION DE CONDUCCION DE ARTICULOS (ECC) S125MIA “PECHORA”. 17. Rápidamente los DSP fueron ganando la batalla a los competidores anteriormente enumerados. Esto condujo a la aparición de nuevos miembros, cada vez más potentes y baratos, en este nuevo segmento del mercado. Entre las razones de este éxito comercial de los DSP están: Elevada potencia de cálculo. Emulación, simulación y ejecución en tiempo real. Flexibilidad. Fiabilidad. Incremento del rendimiento del sistema. Coste reducido del sistema. En los últimos años hemos asistido a un crecimiento espectacular en el uso de los DSP, comenzando a ser utilizados en campos que hasta ahora casi no había entrado la electrónica (automoción, multimedia, entretenimiento, etc.). Así mismo, su aparición ha permitido que desarrollos que hasta entonces sólo se habían realizado a nivel de simulación, hayan podido ser realizados en tiempo real. El crecimiento en el mercado de los DSP triplica el que experimenta el resto del mercado electrónico. En resumen, los DSP han facilitado la creciente digitalización de los más diferentes campos. Este desarrollo no tiene un final definido, apareciendo cada día nuevas aplicaciones en las que son usadas (Instruments, 1998). 1.6.3 Aplicaciones La introducción del TMS320 provee velocidad y flexibilidad; esta combinación produce una familia de procesadores capaces de ejecutar más de 33 millones de puntos de flotantes por segundo (MFLOPS). Dicha familia optimiza velocidad por la implementación de funciones en hardware mientras que otros procesadores lo implementan a través de software o microcódigos. El aprovechamiento del hardware provee un diseño digital con una potencia anteriormente inalcanzable en un solo chip (Instruments, 1998). Dichas características dan paso al empleo de los DSP en diferentes áreas, con la certeza de que estos van a asegurar la rapidez y fiabilidad requerida..
(29) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 18. CAPÍTULO 2. Tarjeta (T223). Funcionalidad dentro del complejo PECHORA Durante este capítulo se expondrán las principales características de la T223, su esquema en bloques y físico, de igual modo se abordará todo lo relacionado con el dispositivo de medición de coordenadas (DDC) y el dispositivo de elaboración de los mandos (DEM). Además se analizan los procedimientos de ingeniería inversa a seguir y se presentarán los distintos software que permitirán realizar las simulaciones y con ello arribar a conclusiones. 2.1. Tarjeta (T223), esquema funcional. En la Figura 2.1 se observa el esquema funcional del sistema implementado en la T223, mostrando así los principales bloques que la componen.. Figura 2.1 Esquema funcional de la Tarjeta (T223) (Pierrat, 2013). En el esquema de la Figura 2.1 se observa que a la T223 le llegan las señales de video del blanco y de los artículos, que se llevan a formato digital y se introducen en la FPGA. También se observa que de esta tarjeta salen, hacia la T224, los mandos que se le envían al artículo ya modulados, con el objetivo de utilizar el descifrador durante el régimen de control, sin tener que emplear la parte de alta frecuencia del DTM, desde donde vienen esos mandos en régimen de combate. A la T223 también llegan impulsos de sincronismo desde la T221, que pueden ser los reales o imitados por esa misma tarjeta. Los impulsos.
(30) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 19. de sincronismo por ángulo son los blanqueos de las antenas, por el plano ε desde la antena UV10 y por los planos F1 y F2 desde la antena UV11, además llegan las directrices de estas mismas antenas. Por distancia llega como sincronismo el impulso que se denomina Ro-UK. 2.1.1. Funcionamiento. Las señales en frecuencia de video que se obtienen a la salida del distribuidor (T316) se envían al dispositivo de determinación de las coordenadas (DDC) del objetivo y del artículo. En el DDC las señales se convierten del formato analógico a formato digital, a cada señal tanto por distancia (impulso de duración 0,5 μs y período de repetición del orden de los 300 μs) como por ángulo (paquete acampanado formado por 11 a 13 impulsos de distancia) se le determina su centro energético, y con este centro se forma un impulso de referencia que dice dónde está el objetivo y el artículo, tanto por distancia como por ángulo. Cuando se realiza el seguimiento automático del objetivo y del artículo el DDC compara el impulso de referencia con unos impulsos denominados “estrobos”, a partir de lo cual crea una magnitud que informa sobre la diferencia entre estos que se toma para mantener siempre las señales en el centro de los estrobos. Estos estrobos, en el caso del objetivo, representan la marca directriz del sector de exploración y para el caso del artículo representan la posición donde debe estar este en el espacio para cada momento dado (Pierrat, 2013). 2.1.2. Dispositivo de medición de las coordenadas (DDC). Las señales de los canales: principal y anti feeding, desde la salida de los amplificadores previos de FI del puesto de antenas, se aplican a los amplificadores principales de FI (T312 y T313). La señal de respuesta del artículo que viene en video desde el puesto de antenas se aplica al amplificador principal de video (T314) en la cabina de dirección. De los amplificadores principales se obtienen las respectivas señales en frecuencia de video y se envían a los bloques del SOM (318) y a la T317 dispositivo ГШН (siglas en ruso que se pronuncian de G SHA EN), y de la salida de todas estas tarjetas se aplican las respectivas señales al distribuidor (T316) que se encarga de enviar las señales, según el régimen que esté conectado, al DDC del objetivo y del artículo, de manera directa, y a los indicadores a través de la T424. De la salida de los bloques del DDC se obtienen impulsos representativos del centro energético de la señal y por tanto la posición por distancia y ángulo del objetivo y del artículo. Para comprender el lugar y la función del DDC dentro del funcionamiento del Complejo hay que remitirse a la figura 2.2..
(31) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 20. Figura 2.2 Esquema simplificado del trabajo del Complejo (Pierrat, 2013). En esta figura se observa como la señal reflejada del objeto llega al receptor y luego al DDC, tanto para la señal del objeto como para la señal del artículo, en el DDC se determinan las coordenadas y esa información se le envía al DEM, el cual elabora los mandos para el movimiento de los timones del artículo en vuelo a través del DTM (dispositivo trasmisor de los mandos). Tanto la señal que llega por el canal principal del receptor (señal que llega desde la antena UV11) como la que viene por el canal anti feeding (señal que llega desde la antena UV10) reciben el mismo tratamiento en el DDC. 2.1.3. Dispositivo de elaboración de los mandos (DEM). Los impulsos del objetivo y del artículo se aplican a este bloque, donde se obtiene el error angular entre objetivo y artículo, y a partir de este error se van a elaborar los mandos de dirección. A la salida del DEM se obtienen los mandos de dirección K1, K2, y los mandos únicos K3, K4, K5 y K6. Los mandos K1 y K2, contienen las magnitudes y el sentido en que debe moverse el artículo en el espacio para disminuir el error lineal entre su posición calculada y la real. Los mandos únicos K3, están destinados para el accionamiento a distancia de la Radioespoleta o explosión de la carga combativa del artículo. Los mandos K4 están destinados para elevar la trayectoria del artículo una vez que éste haya rebasado el punto de encuentro. El mando K5 se emplea para el tiro contra objetivos de superficie y el mando K6 para el tiro al alcance. Estos mandos se envían al dispositivo cifrador del DTM (T811)..
(32) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 2.1.4. 21. Esquema físico. En la T223, hay 2 componentes programables: un FPGA del tipo CYCLONE I (EP1C12Q240I7N) y un DSP del tipo TMS320C6713PYPA. En cada uno de estos componentes está programado el hardware y los algoritmos que permiten realizar las funciones de cada parte del sistema (Pierrat, 2013).. Componente programable FPGA del tipo CYCLONE I EP1C12Q240I7N. DSP del tipo TMS320C6713 PYPA.. Figura 2.3 Imagen de la Tarjeta (T223) (Pierrat, 2013).. 2.2. Proceso de ingeniería inversa. La ingeniería inversa se define como aquel proceso analítico-sintético que busca determinar las características y/o funciones de un sistema, una máquina o un producto o una parte de un componente o un subsistema. El propósito de la ingeniería inversa es determinar un modelo de un objeto o producto o sistema de referencia (Francisco, 2013). Ingeniería inversa del software es la actividad que se ocupa de descubrir cómo funciona un programa, función o característica de cuyo código fuente no se dispone, hasta el punto de poder modificar ese código o generar código propio que cumpla las mismas funciones. La gran mayoría del software de.
(33) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 22. pago incluye en su licencia una prohibición expresa de aplicar ingeniería inversa a su código, con el intento de evitar que se pueda modificar su código y que así los usuarios tengan que pagar si quieren usarlo. El objetivo de este proceso es obtener información a partir de un producto accesible al público, con el fin de determinar de qué está hecho, qué lo hace funcionar y cómo fue fabricado, es una metodología que se utiliza para obtener modelos o duplicados a partir de un objeto de referencia. En el ámbito industrial, la ingeniería inversa se aplica de manera directa o indirecta en procesos, máquinas, así como en el duplicado de partes y componentes. La experiencia indica que en casi un 80% de las actividades de las industrias, está relacionado algún método de la ingeniería inversa. Este método es denominado ingeniería inversa porque avanza en dirección opuesta a las tareas habituales de ingeniería, que consisten en utilizar datos técnicos para elaborar un producto determinado. En general si el producto u otro material que fue sometido a la ingeniería inversa son obtenidos en forma apropiada, entonces el proceso es legítimo y legal. De la misma forma, pueden fabricarse y distribuirse, legalmente, los productos genéricos creados a partir de la información obtenida de la ingeniería inversa, como es el caso de algunos proyectos de software libre ampliamente conocidos. Formulada concisamente, la ingeniería inversa inicia el proceso de rediseño de un producto, donde este es observado, desensamblado, analizado y documentado en términos de su funcionalidad, forma, principios físicos, manufacturabilidad y ensamblabilidad. La intención inicial de este proceso es entender y representar completamente el estado actual del producto (Torres, 2008). Existen dos tipos de ingeniería inversa. El primero se basa en el código estático, es decir, cuando no se utiliza información de tiempo de ejecución, y el segundo analiza el código en. ejecución. Esta. diferencia es importante, en tanto establece la dificultad de la inversión y sus alcances. Mientras que la inversión del código estático se utiliza, ante todo, cuando se generan diagramas que describen su estructura, como el diagrama de clases y el de paquetes, la inversión que analiza el código en ejecución se utiliza, primordialmente, cuando se requieren modelos que revelen las características dinámicas del sistema, como el diagrama de objetos (FOWLER, 2004). El diagrama de secuencias modela el comportamiento dinámico de un software, lo cual sugiere que se debe invertir usando el código en ejecución. Sin embargo, por ser la secuencia de mensajes la que interesa analizar, es posible utilizar la información estática obtenida en tiempo de compilación para invertir sus características esenciales..
(34) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 2.3. 23. Code Composer Studio (CCS). Texas Instruments posee herramientas de desarrollo disponibles que posibilitan un rápido movimiento a través del proceso de diseño de las aplicaciones del DSP desde el concepto, al código, a través del análisis del perfeccionamiento, calibración y puesta a prueba. Muchas de las herramientas son parte del eXpress DSP en tiempo real de Texas Instruments, diseñado para permitir a los innovadores e inventores acelerar el lanzamiento de nuevos productos al mercado y poner en marcha nuevas ideas. Este software incluye tres importantes herramientas que les permite a los desarrolladores explotar al máximo el potencial de los DSP TMS320: Herramientas de Code Composer Studio. El software eXpress DSP, que a su vez incluye: Un software dimensionadle, en tiempo real: DSP/BIOS Algoritmos estandarizados del DSP TMS320 Referencias de entramados de eXpress DSP Una base creciente de los productos TI basados en DSP incluyen productos del eXpress DSP, que son flexibles y por tanto pueden ser integrados fácilmente dentro de los sistemas (Instruments, 2004). 2.3.1. Flujos de trabajo. El flujo recomendado implica utilizar las herramientas de la generación de código C6000 para la optimización en vez de obligar al programador a usar lenguaje ensamblador. De aquí que todo el trabajo difícil le corresponda al compilador y permite que el programador enfoque su atención en conseguir el producto para comercializarlo rápidamente. El flujo de trabajo de la mayoría de las aplicaciones basadas en DSP consiste de cuatro fases principales: diseño de la aplicación, creación del código, la eliminación de los errores del programa y el análisis (Instruments, 2004)..
(35) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 24. Figura 2.4 Flujo de trabajo de la mayoría de las aplicaciones basadas en DSP (Instruments, 2004). 2.4. Software Altera Quartus® II para componentes programables FPGAs. Quartus II es una herramienta de software producida por Altera para el análisis y la síntesis de diseños realizados en HDL. Permite al desarrollador compilar sus diseños, realizar análisis temporales, examinar diagramas RTL y configurar los dispositivos de destino. Con el programa de diseño Quartus II los diseñadores pueden usar los dispositivos Hard Copy Stratix de manera que puede prever y verificar su rendimiento, el cual resulta como promedio un 50 por ciento más rápido que su FPGA equivalente. Además, en el flujo de diseño del Hard Copy Stratix, Quartus II incluye una serie de utilidades que reducen el tiempo de diseño. Como contraste adicional, el software está disponible a un precio inferior en comparación con otras herramientas de diseño de ASIC. Las herramientas de simulación y modelado de alto nivel permiten mejorar y optimizar los tiempos de desarrollo e implementación de las aplicaciones. Asimismo, poseen funciones predefinidas en bibliotecas propias del software para facilitar y agilizar el trabajo del diseñador, y módulos con dispositivos reales del mercado para semejar todo lo posible el trabajo real de los dispositivos (Medina, 2013). Quartus II permite el análisis y síntesis de un circuito digital a partir de su descripción simbólica o a partir de una descripción HDL permitiendo llegar hasta la implementación física del diseño en un dispositivo comercial programable de la compañía Altera. En la Figura 2.5 se muestran las etapas del proceso de diseño en la plataforma de Altera (Altera, 2013)..
(36) CAPÍTULO 2. TARJETA (T223). FUNCIONALIDAD DENTRO DEL COMPLEJO PECHORA. 25. Figura 2.5 Etapas del proceso de diseño en la plataforma Altera (Altera, 2013). 2.4.1. Módulos ejecutables. El software Altera Quartus II provee a los diseñadores módulos ejecutables para cada paso del flujo de diseño en una FPGA, lo que permite hacer el proceso modificable y flexible. Los beneficios previstos por lo módulos ejecutables incluyen control de línea de comando sobre cada paso del flujo del diseño, integración fácil con flujos para los que se escribió un guión del diseño incluyendo makefiles, requisitos de baja memoria y mejor desempeño, además son completamente compatibles con el interfaz de usuario gráfica de Quartus II (Corporation, 2004)..
(37) CAPÍTULO 3. INGENIERIA INVERSA A LOS ALGORITMOS IMPLEMENTADOS EN LA FPGA y DSP PERTENECIENTES A LA T223. 26. CAPÍTULO 3. Ingeniería inversa a los algoritmos implementados en la FPGA y DSP pertenecientes a la T223. 3.1. Análisis del proyecto de Quartus correspondiente a la FPGA de la T223. En la jerarquía del navegador de proyecto aparece como principal y único elemento, el esquemático, que comprende todo el diseño. El proyecto cuenta con 75 archivos de los cuales 45 son archivos con extensión .vhd de código VHDL, 16 son .tdf de código AHDL y 14 son esquemas en archivos .bdf, esta cantidad de archivos es desde el punto de vista del navegador de proyecto. El esquema principal está formado por un conjunto de bloques, compuertas lógicas y puertos, los bloques se nombran a continuación ubicados de izquierda a derecha en el proyecto: tres bloques AD_readdata_lim, ocho bloques Rocket_R_first, cuatro bloques Rocket_R_answer_sel, cuatro bloques Pochak_distance, dos bloques pochak_time, clkcr, clkcr1, fai12gen, fai12_masking, Fai_jun_val, L0imp, pochak_en, 485_Project, Target_R, seis bloques Target_Fai1_AC, dos bloques Rocket_R, dos bloques R_R_sel_gen, cuatro bloques Strob_gen, dos bloques GM_gen, new_dsp, AD_CHK y F_modulation. Obteniendo un total de 49 bloque funcionales. Los puertos de entrada son: clk, D1[9..0], D2[9..0], D3[9..0], SIN[12..1], ROC1_IMP, ROC2_IMP, TAR_IMP, RXD_SB1, RXD_SB6, RXD_SB17 y clk40m1. Por otra parte las salidas son: clk20m, SOUT[24..1], RESETn, FRAM_RSTn, INT4, INT5, NMI, FRAM_CEn, FRAM_wEn, FRAM_O, DA1[9..0], LED1, LED2, LED3, LED4, LED5, LED6, LED7, LED8, ADCLK1, ADCLK2, ADCLK3, DACLK1, BRD_ACT, DSP_ACT, TXD_SB7, TXD_SB2, TXD_SB17 y TXD_SB17_EN. Es notable destacar además que existe una señal bidireccional. Las señales bidireccionales son aquellas que pueden ser utilizadas tanto de entrada como de salida..
(38) CAPÍTULO 3. INGENIERIA INVERSA A LOS ALGORITMOS IMPLEMENTADOS EN LA FPGA y DSP PERTENECIENTES A LA T223. 3.2. 27. Bloque 485_project. La transmisión de los mandos desde la T223 hacia el cifrador (T211) se realiza por la vía de comunicaciones serie mediante la señal SB7. Esta señal se elabora en el bloque de diseño esquemático denominado 485_project, programado en el FPGA de la T223. En la figura 3.1 se muestra el esquema del bloque “485_project”, que se encuentra en el archivo 485_project.bdf.. Figura 3.1 Bloque de diseño esquemático 485_project. En la figura 3.2 se muestran los componentes del bloque “485_project” que están relacionados con la formación de la señal serie SB7. En este esquema se observa el bloque típico “T_15_SB7”, que se usa para poner las señales de 16 bits que llegan en paralelo en una serie de señales que salen en serie, en palabras de 8 bits y que luego, en el bloque “send40_guan”, se llevan al formato exigido por la trama del protocolo RS485, formando así la señal SB7..
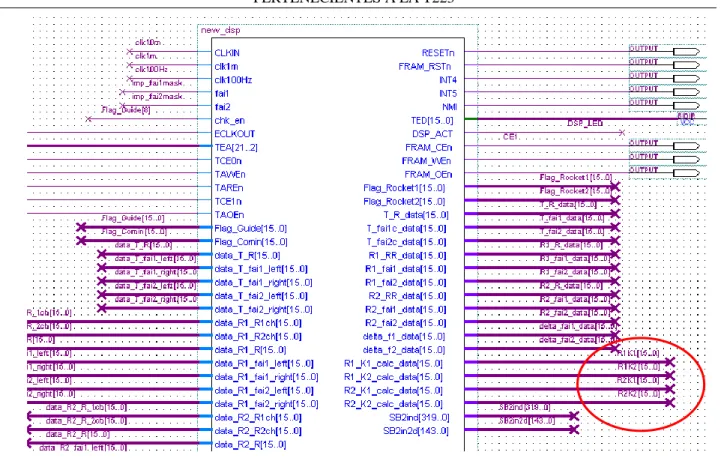
(39) CAPÍTULO 3. INGENIERIA INVERSA A LOS ALGORITMOS IMPLEMENTADOS EN LA FPGA y DSP PERTENECIENTES A LA T223. 28. Figura 3.2 Conversión de señales en paralelo a serie. 3.3. Bloque new_dsp. De este esquema se hará referencia a sus entradas en paralelo, entre las cuales se encuentran las señales de 16 bits “R1K1[15..0]”, “R1K2[15..0]”, “R2K1[15..0]” y “R2K2[15..0]”, que son los mandos de dirección K1 y K2, por los dos canales, que se pretenden convertir en mandos cifrados (en la T811) para enviárselos por la antena UV12 a los artículos en vuelo..
(40) CAPÍTULO 3. INGENIERIA INVERSA A LOS ALGORITMOS IMPLEMENTADOS EN LA FPGA y DSP PERTENECIENTES A LA T223. 29. Figura 3.3 Esquema del bloque new_dsp. Como se observa en la figura 3.3, lo mandos K1 y K2 salen del bloque de diseño esquemático denominado new_dsp, programado en el FPGA de la T223. Dentro del bloque new_dsp esos datos toman el nombre de “R1_K1_calc_data[15..0]”, “R1_K2_calc_data[15..0]”, “R2_K1_calc_data[15..0]” y “R2_K2_calc_data[15..0]”, que salen del bloque de diseño esquemático main_IO. En el bloque de diseño esquemático main_IO se organiza el acceso a la información proveniente del DSP, de donde llegan los mandos K1 y K2 por el bus de 16 bits denominado DSP_ED[15..0] (TED[15..0]). (Ver figura 3.4).
(41) CAPÍTULO 3. INGENIERIA INVERSA A LOS ALGORITMOS IMPLEMENTADOS EN LA FPGA y DSP PERTENECIENTES A LA T223. 30. Figura 3.4 Segmento del bloque main_IO. El bus de datos (bidireccional) por el cual llegan al FPGA los mandos K1 y K2, desde el DSP pasa por los arreglos de resistencias R8, AR9, AR10 y AR11, implementados en el esquema electrónico de la T223, que están conectados a los pines 111 – 132 del DSP. (Ver anexo V) 3.4. Análisis del DSP de la T223. En el programa instalado en el DSP la formación de los mandos K1 y K2 se realiza en segmentos del programa main.c. Esto se muestra a continuación. Para el primer canal del artículo:. Figura 3.5 Representación del segmento del programa main_ c para el primer canal del artículo.
Figure




+7





Documento similar