Análisis para la implementación de servicios telemáticos en una empresa automotriz
83
0
0
Texto completo
(2) Índice. ' Indice Introducción general.. ..................................................................................... 7 Capítulo 1 : Generalidades de un sistema telemático en los automóvil,~s 1.1. Introducción ........................................................................................ 9. 1.2. Evolución de las redes automotrices ............................................................ 9 1.2.1 Concepto de Información y Entretenimiento "/nfotainment". 1.3. Evolución de los servicios de telecomunicaciones móviles ............ .. .... .... .... .. ...... .... .. 11 1.3.1 Sistemas telemáticos en los vehículos. 1.4. El estándar OSGi (Open Services Gateway lnitiative) ................................................... 13 1.4. 1 Arquitectura. 1.5. Conclusión ....................................................................................... 19. Capítulo II. Redes integradas al automóvil y redes de telecomunic3,ciones. 11.1. lntroducción .................................................................................................................. 21. 11.2. Redes Integradas al automóvil... ............................... ....... .. .. .. ............ ............. ........ ...... 21 11.2.1 Buses de prioridad 11.2.1.1 CAN (Controlled Area Network) 11.2 .1.2 VAN (Vehicle Area Network) 11.2 .1.3 JI 850 11.2.2 Redes disparadas por tiempo (Time-Triggered Networks) 11.2.2.1 El protocolo TTP/C 11.2.2.2 El protocolo FlexRelay 11.2.2.3 El protocolo CAN disparado por tiempo (TTCAN -Time Triggered CAN (TTCAN) Protocol) 11.2.3 Redes automotrices de bajo costo (Low-Cost Automotivc Networks) 11.2.3.1 LIN 11.2.3.2 La red TTP/A 11.2.4 Redes Multimedia 11.2.4.1 MOST 11.2.4.2 La red IDB-1394 11.2.5 Redes Inalámbricas (Wireless).
(3) Índice. 11.3. Comunicaciones de corto alcance ................................................................... ....... ....... 32 11.3.1 Bluetooth 11.3.2 IEEE 802.11 x. 11.4. Conexión a la red móvil de área amplia ......................... .. ........ . ... . .. .... ......... 38 11.4.1 Enlace Satclital (GPS) 11.4.2 GPRS. 11.5. Conclusión. Capítulo III. .................................................................................. 42. Diseño De Sistema Telemático. 111 .1. lntroducción ..... ............................................................................................................ .43. 111.2. Descripción de funcionamiento del sistema ................................................................ .43 111.2.1 Luz de verificación del motor 111.2.2 080-11 (On-Board Diagnostic /f). 111.3. Modelo de Red ......................................................... .............. ......... ..................... .47. 111.4. Componentes del sistema .............. . .. .. .... . .... . . . ......... . .............................. 51. 111.5. Modelo de operación ............................................................................ 59. 111.6. Conclusión .................................................................................................................... 60. Capítulo IV Estudio De Factibilidad. IV. Introducción ................................................................................................................. 61. IV .1. Estudio de factibilidad técnica ..................................................................................... 61. IV.2. Estudio de factibilidad económica ......... .. ..... ......... ....... ......... ............. .. ... ... ................ 70. IV.3. Estudio de factibilidad operativa ................................................................................. 74. IV.5. Análisis de mercado ..................................................................................................... 76. IV.6. Dispositivo de comunicación propuesto.................................................... 77. IV.7. Conclusión ................. . ............. . ........... . ........... . ...... . .... . ................... 78. Conclusión general y perspectivas........................................................................................ 79 Anexo .... ......... ... ........... ............ ....... ................................................ ...................................... 81 Bibliografia ............................................................................................................................ 83.
(4) Introducción General. Introducción General Introducción General En la actualidad los sistemas de información son una herramienta que caracteriza a las empresas de primer nivel y las hace más competitivas. Los sistemas e.e información tienen ahora una importancia crítica para tener una ventaja competitiva en los negocios. Las empresas que están habilitadas para identificar sistemas estratégicos de información de fácil desarrollo o adoptar programas de cómputo y usarlos para desarrollar su reingeniería de negocios y soportar sus procesos clave son las que serán exitosas (Manuel A. Alcuza, Jr, 1996 ). Los países en desarrollo como México tienen grandes oportunidades para que sus empresas aprovechen los avances tecnológicos y lleguen a ser más competitivas, e· uso de la tecnologías móviles son una gran oportunidad para poder ofrecer servicios de valor agregado. Los servicios de comunicación móvil se están expandiendo de una manera sin precedente alrededor del mundo. Las naciones en desarrollo están el proceso de llevar más adelante el desarrollo de su infraestructura de comunicaciones móviles con el conocimiento del crecimiento de la demanda por servicios (Kidnapillai Selvarajah, 2000). En el entorno actual tan competitivo, las empresas buscan diferenciar sus servicios, una de las formas de diferenciarse de la competencia es haciendo uso de la tecnología, pero como se menciona el artículo "Case Study in the Application of E-Business to the Retail Sector" de Mark Ripley, 2001 "En su prisa por explotar el Internet, algunos vend,~dores parece que han olvidado que, a menos que las tecnologías puedan significar una reducción de costos en el negocio, esta no tendrá la suficiente motivación en los usuarios para invertir en ella". Así pues en el marco del uso de la tecnología y los sistemas de información para hacer nuestras empresas más competitivas, considerando el crecimiento de los servicios móviles en México, podemos observar que los servicios de comunicación móvil están en continuo crecimiento y desarrollo, refiriéndonos a una publicación en Internet de Información sobre telecomunicaciones titulado "El futuro inmediato en los mercados de servicios PCS" editado por Roberto Martinez Illescas de diversos artículos de revistas tecnológicas, el editor comenta que de acuerdo con información difundida por la oficina de Medios y Telecomunicaciones del Financia] Times, cada tres segundos, un nuevo suscriptor se añade a la cuenta de algún servicio móvil de telecomunicaciones en Estados Unidos; en el resto del mundo lo mismo sucede cada segundo. Esta tesis trata del análisis para implementar serv1c10s telematicos en Mexico, para una empresa del ramo automotriz; la implementación de estos servicios pueden provocar un desarrollo importante en varios sectores, desde la mejora en las operaciones de la empresa usuaria hasta un mayor desarrollo en los servicios provistos por las empresas de telecomunicaciones, fomentando el desarrollo de nuevos servicios y la posible creación de empresas que pueden dedicarse a la operación de este tipo de sistemas. 7.
(5) Introducción General. La electrónica y redes incorporadas en los automóviles modernos, también nos proporcionan una área de estudio, bastante interesante y amplia, donde funciones de investigación y desarrollo pueden ser bastante interesantes de llevarse a cabo en nuestro país para el desarrollo de tecnología propia Esta tesis esta dividida en 4 capítulos, a continuación se presenta un resumen de los temas que pueden encontrarse en el desarrollo.. Capítulo 1.- En este capítulose puede encontrar información sobre los conceptos generales de las redes automotrices, servicios de comunicaciones móviles y los sistemas telemáticos existentes para los vehículos; se hace una revisión del estándar OSGi que es un estándar abierto, y que se pretende sea el estándar mundial para desarrollar e implementar dispositivos y servicios telemáticos aplicables a cualquier sistema e industria. Capítulo 2.- Se hace una revisión detallada de lo que son las redes integradas a un automóvil, sus características y funcionalidades, con esta información posteriormente se hace una revisión de diferentes tecnologías de telecomunicaciones móviles, con la información de este capítulo se puede tener una visión acerca de cuáles son los componentes que funcionan como entorno de red de área local y cuáles tecnologías de red de área amplia pueden usarse para interconectarlas. Capítulo 3.- Se muestra el diseño del sistema propuesto, se hace una revisión de los sistemas existentes en los automóviles para diagnosticar fallas y se explica como se pretende usarlo para los propósitos del sistema propuesto en esta tesis. Se desglosan los componentes y recursos a usar en el diseño y se muestra el modelo de red propuesto. Capítulo 4.- Se hacen los estudios de factibilidad técnica, económica y operativa; se revisa infonnación de los recursos tecnológicos disponibles para implementar el sistema, se desglosan y analizan los recursos financieros necesarios y el análisis de rentabilidad para determinar si el sistema financieramente viable; así también se lleva a cabo el estudio de factibilidad operativa para determinar si los recursos necesarios para su puesta en operación, son los suficientes y adecuados para poner a operar el sistema como se requiere. Esta tesis aporta información con datos recientes acerca de tecnologías de redes en automóviles, sistemas y estándares actuales para la interconexión y operación de dispositivos de red a distancia y de recursos tecnológicos de transmisión de datos móviles disponibles en México; la cuál puede servir como base de referencia a futuras investigaciones de los componentes mencionados o el tema tratado en esta tesis, como base para la creación de empresas que quieren incursionar en los servicios telemáticos con el sistema propuesto o alguno diferente, o para desarrollar programas de investigación o estudio, que tengan como objetivo la creación de tecnología propia para la puesta en operación de este tipo de sistemas, o componentes involucrados como las redes automotrices, enfocando estas investigaciones o estudios hacia aquellos componentes o servicios que son dificiles de conseguir en México.. 8.
(6) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. Capítulo I Generalidades de un sistema telemático en los vehículos 1.1. Introducción. En este capítulo se revisa infonnación acerca de la evolución de las redes automotrices, estas redes han sido incorporadas en el proceso de fabricación de vehículos para reducir arneses de cable y mejorar la transferencia de datos entre sus dispositivos electrónicos [KOB-90]. Estas redes penniten la integración de nuevos sistemas que sirven para brindar mayor seguridad u opciones de entretenimiento a los ocupantes de un vehículo, apareciendo el concepto "lnfotainment" por las siglas de la abreviación en Inglés de "fnformation and entertainment" (Información y entretenimiento). Se hace una revisión del concepto y la historia de las tecnologías de comunicación inalámbricas, ya que parece ser la opción más evidente para comunicar dispositivos móviles, con esta revisión podemos tener una panorámica de su evolución, capacidades actuales y tendencias futuras. Al final del capítulo se hace una descripción de lo que son los sistemas telemáticos actuales para vehículos y el estándar de comunicación recomendado para la operación de los mismos, que pretende llegar a ser el estándar de facto para sistemas de diversas industrias que pueden ser operados a distancia.. 1.2 Evolución de las redes automotrices. El automóvil se ha venido transfonnando de ser una máquina analógica con sistemas de controles mecánicos e hidráulicos a un auto digital con un rápido de crecimiento de sistemas de control basados en computadoras [JUL-03]. El diseño de nuevos automóviles considera una amplia utilización d;: circuitos eléctricos y electrónicos para reducir costos, mejorar la confiabilidad y agregar funcionalidad. La industria automotriz esta desarrollando estándares abiertos de red para reducir los costos, mitigar la obsolescencia, nivelar los avances de la tecnología y acelerar el tiempo de mercado. Este tipo de circuitos eléctricos y electrónicos se han venido incorporado en los automóviles para proveer diversas funciones internas del automóvil, con aplicaciones, que pueden considerarse en algunos casos bastante sencillas, como por ejempb el despliegue de las 9.
(7) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. antenas de los radios hasta otras más complejas como el control de temperatura de los asientos [JUL-03]. La incorporación de estas funcionalidades ha hecho que se desarrollen diversos estándares y plataformas para redes de datos que forman parte integrante de los automóviles. Una plataforma común de red podría ayudar a los fabricantes de automóviles y a los fabricantes de dispositivos electrónicos a satisfacer las necesidades y demandas de sus clientes, asegurando que los nuevos dispositivos y funcionalidades puedan ser integrados en el automóvil en cualquier momento. Esta plataforma común idealmente debiera tener las siguientes características: 1.- Habilidad para soportar un ancho de banda garantizado. 2.- Capacidad de conexión y desconexión automática de dispositivos (Hot-plug). 3.-Solución universal de entrada y salida para la integración de puertos y consolidación de espacio de conexión. 4.- Habilidad para usar cables y conectores pequeños, flexibles y económicos. 5.- Contar con una topología flexible, que soporte la ampliación y desconexión de nodos. Las tecnologías de información y los sistemas de entretenimiento han estado por lo regular adelante de los ciclos de diseño automotrices, de manera especial las tecnologías de entretenimiento móvil están evolucionando y creciendo rápidamente en los campos de la industria automotriz y otras industrias. Las redes automotrices han desplazado a un gran número de los antiguos arneses de cable que constituyen la infraestructura de un automóvil para la transmisión de datos internos y para la comunicación de los dispositivos electrónicos del vehículo, que a su vez han reemplazado algunas operaciones manuales para el conductor como el control d(: cristales, la temperatura interna o el volumen del radio para proveer mayor confort al usuario.. 1.2.1 Concepto Información y Entretenimiento "Jnfotainment-. lnformation and Entertainment" La industria automotriz en el mundo esta incorporando mayor electrónica a los automóviles desarrollando novedosas aplicaciones tecnológicas de información y entretenimiento para el ocupante, este nuevo concepto se conoce como lnfotainment por sus siglas en Inglés de "lnformation and entertainment" que quiere decir información y entretenimiento. Los nuevos dispositivos electrónicos, agregan a los vehículos este tipo de sistemas, los cuáles pueden proporcionar al ocupante información de tráfico, rutas o lugares cercanos y pueden a su vez proveer las capacidades necesarias para el control de los dispositivos de entretenimiento como audio o DVD por ejemplo [KIB-04].. 10.
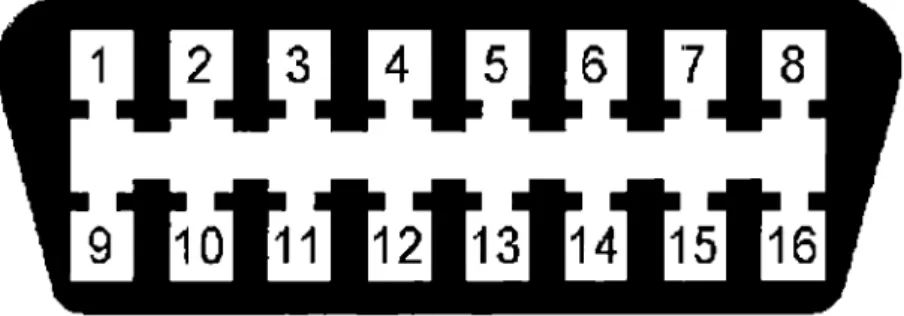
(8) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. Estas nuevas facilidades, proveen al ocupante de un automóvil, de aplicaciones y recursos tecnológicos que hacen más confortable su estancia en el automóvil y a :;u vez crea un mayor atractivo de compra entre las opciones de productos de las diversas empresas automotrices. Las telecomunicaciones juegan un papel muy importante dentro de este concepto aplicado a la industria automotriz, dado que por medio de ellas, se le puede proveer a los ocupantes de un vehículo, información o descarga de utilidades bajo demanda como por ejemplo música, directorios de cines o restaurantes.. 1.3. Evolución de los servicios de telecomunicaciones móviles.. Las telecomunicaciones móviles juegan un papel muy importante para el aprovisionamiento de nuevos servicios en la industria automotriz, por esta razón se presenta un pequeño resumen de la historia de las comunicaciones móviles, para comprender el origen de las mismas, su evolución y para saber de que manera podemos explotarlas.. Antes del "nacimiento de la radio" 1867 Maxwell predice la existencia de ondas electromagnéticas. 1887 Hertz prueba la existencia de ondas electromagnéticas. 1896 Guillermo Marconi demuestra el telégrafo inalámbrico a una oficina de telégrafos inglesa. El nacimiento del primer radio 1897 Marconi cede la patente para el telégrafo inalámbrico. 1897 La primera "estación Marconi" se estableció en la isla Leedles para comunicarse con la costa inglesa. 1898 Marconi concedió la patente inglesa no. 7777 para la comunicación sintonizada. 1898 Se establee,~ la comunicación telegráfica inalámbrica entre Inglaterra y Francia. Comunicación Tmnsoceánica 1901 Marconi transmite de manera exitosa una señal de radio a través del océano Atlántico de Comwall to Newfoundland. 1902 Se establece la primer comunicación bidireccional a través del A1 lántico. I 909 Marconi recibe el premio Nobel de física de voz sobre radio. 1914 La primera transmisión de voz por radio. 1920s Se instalan recptores de radio en los carros de policía de la Ciudad de Detroit en los Estados Unidos. 1930s. Desarrollo de transmisores móviles, los cuáles son principalmente usados por los carros de policía. 1935 La modulación en frecuencia (FM) es demostrada por Armstrong). 1940s. La mayoría de los sistemas de policía son convertidos a FM. Nacimiento de la telefonía móvil 1946 Es la primera interconexión de usuarios móviles a la red telefónica pública conmutada. 1949 La FCC reconoce al radio móvil como una nueva clase de servicio. 11.
(9) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. 1940s 1950s 1960s 1960s. J976. 50,000 usuarios móviles. 500,000 usuarios móviles. 1,400,000 usuarios móviles. se introduce el sistema MTS por sus siglas en Inglés de "fmproved Mobile Te/ephone Service (IMTS) ", el cuál soporta comunicación bidireccional (full-duplex), auto marcación y auto troncal. La compañía telefónica Bell cuenta con 543 clientes usando : 2 canales en el área de la ciudad de Nueva Cork, y tiene en lista de espera a 3700 clientes, la calidad de servicio es baja.. Telefonía celular móvil 1979 NTT/Japón desarrolla el primer sistema de comunicación celular. 1983 Advanced Mobile Phone System (AMPS) desarrolló en Estados Unidos en la banda de los 900 MHz. 1989 Groupe Spécial Mobile define el estándar digital celular Europeo, GSM . 1991 Se introduce el sistema de telefonía celular en los Estados Unidos. 1993 Es implementado en los Estados Unidos el sistema digital celular IS-95 code-division multple-access (CDMA) spread spectrum. PCS y en adelante. 1995 En Estados Unidos la FCC subastó la banda de frecuencias de sistemas de comunicación personal (PCS Personal Communications System) a 1.8 GHz para telefonía móvil. 1997 El número de usuarios de teléfonos celulares en Estados Unidos rebasa los 5 50,000,000. 2000 Tercera generación de dispositivos móviles .. 1.3 .1 Sistemas telemáticos en los vehículos. Dos predecesores de los sistemas telemáticos están disponibles actualmente en el mercado. Primeramente podemos hablar de los sistemas individuales de navegación, desde hace algunos años están siendo ofrecidos en los automóviles modernos como accesorios adicionales . Se clasifican a estos sistemas como predecesores dado que no hacen uso de la tecnología de comunicaciones móviles para acceder su servicio de datos (SEN-O 1]. En segundo lugar podemos hablar de los servicios que proveen seguridad al conductor y soportan servicios basados en los sistemas de posicionamiento global (GPS.-Global Positioning System) y tecnología de telefonía móvil. Es importante hacer notar que ninguno de estos sistemas tiene interacción directa con las computadoras o sistemas de redes de los automóviles, lo cuál es una de las principales características de un sistema telemáticos. De esta manera podemos conceptualizar la evolución de los sistemas telemáticos, desde los sistemas iniciales de mapas sin conexión al vehículo y hasta aquellos sistemas separados con 12.
(10) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. teléfonos móviles, hasta la primera generación de los sistemas realmente conectados a los dispositivos de cómputo y redes del automóvil para proporcionarle1; servicios de voz, entretenimiento y funciones mejoradas de seguridad por medio de sistemas de posicionamiento global. Estos sistemas serán mejorados en el futuro próximo con dispositivos clientes de software que podrán usar conectividad a Internet de 2 vías y mejorar las aplicaciones y servicios que se provean. Con la incorporación de estos dispositivos se podrán proveer una mayor cantidad de servicios de valor agregado así como servicios orientados al consumidor. Las aplicaciones iniciales básicas en esta siguiente generación de si:;temas pueden ser la actualización de los mapas existentes de los sistemas guías y de los sistemas de seguridad. Así también pueden incluir servicios de diagnóstico y mantenimiento pro•,istos como parte del paquete de mantenimiento del vehículo. Algunas otras aplicaciones se incorporarán en el largo plazo las cuáles pueden incluir mensajería remota (e-mail y/o SMS), servicios de seguimiento e intercambio financiero, actualización d_e noticias, deportes y entretenimiento (mp3, video en ráfagas, juegos, etc.,); la lista de servicios es virtualmente interminable. Estas nuevas aplicaciones requerirán algún tipo de acceso directo al sist-~ma cliente, en el caso más simple esto puede llevarse a cabo mediante una interfase de usuario que puede ser gráficas o de voz. Los servicios más complejos como los diagnósticos pueden requerir interfaces a los dispositivos electrónicos y controladores del automóvil.. 1.4 El estándar OSGi "Open Services Gateway lnitiative" Las interfaces requeridas para proveer los servicios descritos deben ser construidas basándose en estándares abiertos a través de todas las variantes y plataformas de vehículos de forma tal que puedan incorporarse los productos de cualquier proveedor de serv1c1os y consecuentemente reducir los costos de los proveedores de servicios de aplicaciones y pueda motivarse la creación de servicios. La iniciativa de compuerta de servicios abiertos (OSGi- Open Services Gateway lnitiative) fue fundada en marzo de 1999, con la misión de crear una especificación abierta para la entrega de múltiples servicios sobre dispositivos y redes de área local. Los miembros de OSGi son compañías de software, hardware y proveedores de negocios [URB-03). OSGi está apresurando la adopción de su tecnología y acelerando mundialmente la demanda de productos y servicios basados en estas aplicaciones a través del patrocinio del mercado y programas de educación al usuario. Los tres aspectos principales de la misión de OSGi son: múltiples :;ervicios, redes de área amplia, y dispositivos y redes de de área local. A diferencia de otras iniciativas, OSGi se concentra en una arquitectura completa de soluciones de punto-a-punto (end-to-end) desde el proveedor de servicios remotos hasta los dispositivos locales. 13.
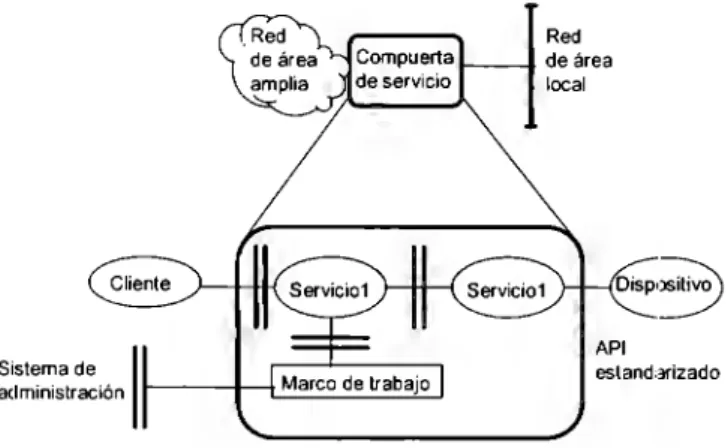
(11) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. El enfoque de la especificación OSGi es proveer una capa abie11a de aplicaciones y una interfase de compuerta, que complementa y mejora virtualmente todos los estándares actuales e iniciativas de redes locales. La especificación OSGi proporciona una arquitectura común y abierta para proveedores de servicio, desarrolladores de sistemas, vendedores de software, vendedores y fabricantes de equipo para desarrollar, implementar y administrar fácilmente muchos servicios de una manera coordinada. El componente central del esfuerzo de la especificación OSGi, es la compuerta de servicios, que funciona como la plataforma para muchos servicios basados en comunicaciones. La compuerta de servicios puede habilitar, consolidar, y administrar voz, datos, Internet, y comunicaciones multimedia hacia y desde el hogar, la oficina y otras localidades. La compuerta de servicios también puede funcionar como un servidor de aplicaciones para servicios de gran valor como administración de energía y control, servicios de seguridad, servicios de monitoreo de cuidado de salud, control y mantenimiento de dispositivos, servicios de comercio electrónico y más. La compuerta proporciona un punto focal a los proveedores de serv1c1os, para que estos puedan entregar sus servicios a los dispositivos cliente en las redes locales. Un ejemplo de implementación de la compuerta OSGi, es que puede enlazar los dispositivos cliente en las redes locales, como medidores de energía, dispositivos inteligentes o de información a proveedores externos de servicios. En la figura 1.1 se muestra el concepto de la red de área amplia, red local y compuerta de servicios.. 14.
(12) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. Red de área local. Disp,~. estand,3rizado. Figura 1.1.- Compuerta de servicio. A través de la habilitación de conectividad y administración de nuevas categorías de dispositivos inteligentes, la compuerta de servicios puede ser integrada de manera total o parcial en diferentes categorías de productos existentes (digitales o analógicos) como cablemodems, routers, compuertas residenciales, PC' s y otros. La figura 1.1 muestra una sola compuerta de servicios, pero la arquitectura OSGi soporta múltiples compuertas de servicios, múltiples puntos de acceso a redes de área amplia y múltiples redes locales trabajando conjuntamente para proveer diferentes servicios de diferentes proveedores. Todos los miembros de las compañías fundadoras han reconocido la necesidad de los estándares abiertos en el área de la implementación de plataformas de servicios remotos. Trabajando de manera conjunta, contribuyendo ideas y definiendo e~pecificaciones se han creado estándares que tanto los vendedores de equipo y proveedores de servicio han podido aceptar. Dentro de las principales especificaciones del estándar OSGi están las siguientes: • • • • • • •. Independiente de la Plataforma. Independiente de la Aplicación. Seguridad. Múltiples servicios. Múltiples tecnologías de red local. Múltiples tecnologías de acceso de dispositivos. Co-existencia con otros estándares. 15.
(13) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. 1.4.1 Arquitectura La especificación técnica de OSGi proporciona un estándar abierto para premisas programables del equipamiento de usuario que incluye: descargas de software, administración del ciclo de vida de la aplicación, compuerta de seguridad, acceso a los dispositivos conectados, administración de recursos y funciones necesarias para la administración remota de la compuerta. Los principales componentes identificados del modelo de arquitectura OSGi son: • • • • • •. Compuerta de servicios. Proveedor de servicios. Agregador de servicios. Operador de compuerta. Red de área amplia y proveedor de servicios de Internet. Dispositivos y redes locales.. Las relaciones entre estas entidades se muestran en la figura 1.2.. Red de ar,3a local 1 Proveedor de servicios #1 Proveedor de servicios #2. Proveedor de red temperatura • Servicios alámbricos. Cliente grueso Sensor de presión. Figura 1.2.- Arquitectura OSGi punto a punto. Compuerta de servicios. El componente central de la arquitectura punto-a-punto de OSGi es la compuerta de servicios abiertos (OSG-Open Services Gateway). Técnicamente la compuerta de servicios es un servidor integrado que esta enlazado a la red de área amplia para conectar a los proveedores de servicios externos a los clientes internos y separar de manera efectiva la topología dentro de la red externa y la red interna. La compuerta de servicios es un dispositivo seguro, de cero 16.
(14) Capílulo 1 : Generalidades de un sistema telemático en los vehículos. administración local con conectividad a dispositivos locales. La especificación OSGi incluye APl's (Application Programs Interfaces) para la administración del ciclo de vida del servicio, administración de la dependencia inter-servicio, administración de datos, acceso y administración de dispositivos, acceso de clientes, administración de recursos y seguridad. Proveedor de servicios El proveedor de servicios entrega servicios usando la compuerta de servi:ios en conjunto con un servidor opcional remoto y habilita dispositivos de cliente local. El servicio en la compuerta es una aplicación de software que se descarga por el operador de la compuerta dentro de la compuerta. Algunos ejemplos de servicio son: • • •. Servicio de mantenimiento verificando que los dispositivos en la casa están trabajando apropiadam,:nte. Facturación desglosada acorde al consumo de electricidad. Sistema de seguridad fisica monitoreando sensores y activando ahrmas con comandos desde un servidor remoto.. Los proveedores de servicio son verificados por el operador de la compuerta, de esta manera se asegura que las operaciones de descarga, instalan código confiable esta en la compuerta. Agregador de servicio. Un agregador de servicio es un tipo especial de proveedor de servicio que ofrece un conjunto de servicios (Por ejemplo lectura automática de electricidad, medición de gas y agua, administración de alarmas y energía) todos en conjunto. El agregador de servicio, agrega todos los servicios que esta permitido sean cargados en la compuerta y tiene la responsabilidad para asegurar que el conjunto de servicios sean mutuamente compatibles y que los dispositivos no entren en conflicto de usos o de requerimientos de recursos. A causa de la responsabilidad de poner servicio:; en conjunto, el termino agregador de servicio es frecuentemente intercambiado con operador de compuerta, pero hablando de manera estricta los roles son diferentes. Operador de compuerta. El operador de compuerta administra y mantiene los servicios de compuerta y sus servicios. Esta responsabilidad de administración puede sobrepasar algunas cosas c:on las de agregador de servicios y esta es la razón de que los términos frecuentemente se intercambien. Algunas funciones del operador de compuerta son: • • • • •. Descargar, arrancar, detener, actualizar y remover un servicio. Controlar los recursos de la compuerta, verificar el estado operativo de la compuerta y administrar las versiones de los servicios. Administrar la compuerta y monitorear el estatus del dispositivo. Definir y controlar los derechos de acceso entre la compuerta y los proveedores de servicios. Hacer que las comunicaciones entre la compuerta y los proveedores de servicios sean seguras. 17.
(15) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. • •. Verificar y validar los derechos de cualquier dependencia que un servicio puede tener sobre otros servicios. Controlar y administrar las conexiones lógicas de dispositivos y redes locales hacia la compuerta, incluyendo la autorización de descarga de controladores de dispositivos y red.. El operador de compuerta también puede jugar el papel de dueño de la compuerta (por ejemplo cuando renta la compuerta), el revendedor de la compuerta para comprar compuertas, el instalador de la compuerta (proporcionando instalación profesional), y el que da mantenimiento al hardware de la compuerta. El rol del operador de la compuerta puede ser combinado con el de proveedor de servicio, agregador de servicio o proveedor de red de área amplia. El operador de compuerta debe ser una entidad confiable y segura para llevar a cabo las operactoncs de descarga y asegurar que únicamente código confiable sea instalado en la compuerta.. Proveedor de red de área amplia. La red de área amplia proporciona las comunicaciones necesarias entre la compuerta de servicio, el operador de compuerta, el portador y el proveedor de servicios. Este servicio de comunicación puede ser proporcionado y administrado por un operador o, cuando la red de área amplia es Internet, puede ser provista por un proveedor de servicios de Internet ISP (ISPlnternet Service Provide1). El ISP puede ejecutar otras funciones, y en particular ser el operador de la compuerta. La combinación de ISP y operador de la compuerta, puede hacerse muy popular en algunos segmentos de mercado, como los de la industria de cable, pero puede ser posible tener independencia entre el operador de la compuerta y el ISP. Por ejemplo, una empresa de energía puede ser capas de correr un servicio de compuerta sin tener que operar un sistema ISP y una residencia puede tener diversas compuertas, algunas de las cuales son independientes del ISP . Si alguno de los servicios de la compuerta es el acceso a Internet la separación entre ISP y el operador de la compuerta puede ser un problema por ejemplo cuando se tiene que determinar quien es responsable de los dispositivos de seguridad de acceso a los archivos almacenados en la computadora de una casa '/irewalls ", del ruteo y otros aspectos relacionados al acceso.. Dispositivos y redes locales. La última pieza más importante de la arquitectura tiene que ver con los dispositivos y redes locales conectadas a los servicios de compuerta. Esta conexión de dispositivos hace de la compuerta de servicios algo más que solamente otra computadora. Los dispositivos pueden conectarse directamente a la compuerta usando conexiones de hardware paralelos o seriales o indirectamente conectados por medios de transporte de red local como 8/ue Tooth, IEEE 1394 o redes inalámbricas "wireless ". El valor real de los servicios de compuerta tiene que ver con los servicios que puede proveer en conjunto con los proveedores de servicios remotos y dispositivos locales. 18.
(16) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. 1.5 Conclusión En este capítulo se han revisado los principales conceptos de los sistemas, funcionalidades y recursos requeridos, para comprender que es un sistema telemático y los componentes que intervienen. Se ha visto que las redes que se están incorporando a los vehículos pem,iten por una lado la reducción de peso en los vehículos y por otro lado la integración de nuevas funcionalidades que requieren de un medio de comunicación confiable, rápido y que cubra las expectativas de crecimiento y capacidad para atender las necesidades actuales y futuras de seguridad y entretenimiento que los usuarios de los nuevos vehículos pueden tener a su alcance, mediante la utilización de tecnología moderna. La historia de las comunicaciones inalámbricas nos ha proporcionado una base de información y una perspectiva acerca de la evolución de este medio de comunicación y el potencial que tiene respecto a sus aplicaciones actuales y crecimientos futuros, este medio de comunicación sigue evolucionando de forma tal que se esperan mayores capacidades y diferentes métodos de conexión para atender eficazmente a nuevas aplicaciones móviles.. El conocimiento del estándar y la arquitectura OSGi para administrar y operar dispositivos a distancia, parece ser que se perfila como el estándar a nivel mundial, para ser adoptado por los diferentes fabricantes de dispositivos y sistemas telemáticos en diversas industrias, que permitirá habilitar una plataforma abierta, donde nuevos participantes podrán incursionar en este mercado, productos y servicios nuevos e innovadores, permitiendo su integración al mercado de una fo1ma más sencilla porque serán compatibles tecnológicamente en cualquier lugar del mundo.. 19.
(17) Capítulo 1 : Generalidades de un sistema telemático en los vehículos. 20.
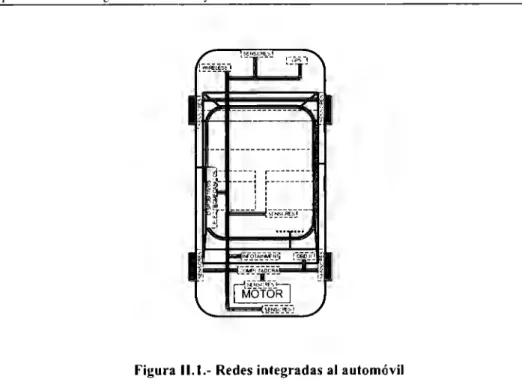
(18) Capítulo 11: Redes integradas al automóvil y redes de telecomunicaciones. c:apítulo 11 Redes integradas al automóvil y redes de telecomunicaciones 11.1.- Introducción En este capítulo se revisan los diferentes tipos de redes locales que se están implementando para la comunicación y funcionamiento de diversos dispositivos dentro de dominio del cuerpo de los automóviles. A través de este conocimiento de las redes integradas a los automóviles, se puede modelar a un automóvil como una red de área local que es capaz de manejar diferentes aplicaciones que operan con diferentes clases de servicio, al modelar un automóvil como una red de área local esta debiera ser capaz de interconectarse con otra red local que se puede encontrar geográficamente separada, esta interconexión puede llevarse a cabo por medio de una red de área amplia de telecomunicaciones y una compuerta de comuni:::ación. Se hace una revisión de diversas redes de comunicación inalámbrica de corto y largo alcance, con diferentes capacidades y tecnologías que pueden ser usadas para :::omunicar las redes locales modeladas por los automóviles, para proporcionar o entregar nuevos servicios o funcionalidades de acuerdo a las capacidades, tecnologías y rango de cob,!rtura proporcionado por las redes de telecomunicaciones.. 11.2 Redes integradas al automóvil Los diferentes requerimientos de desempeño en un vehículo, así como la competencia entre las compañías de la industria automotriz, han conducido al diseño de un gran número de redes de comunicaciones. En este capítulo proporcionamos información relacionada a este tipo de redes que existen actualmente en los automóviles, la figura Il. l muestra un esquema de este tipo de redes.. 21.
(19) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. r--------. r--------. '' ''. Figura 11.1.- Redes integradas al automóvil. 11.2.1. Buses de Prioridad. Para asegurar a tiempo el intercambio de datos y la entrega a tiempo de comandos a los actuadores, es crucial el protocolo de control de acceso al medio (MAC-Medium Access Control) para asegurar la respuesta a tiempo de las tramas. En la industria existen dos principales tipos representativos de "buses de prioridad" que son CAN ( Controlled Area Network) y J 1850.. 11.2.1.1. CAN "Controlled A rea Network". CAN es sin lugar a dudas la red mas ampliamente usada dentro de un vehículo. Fue diseñada por Bosch a mediados de los 80's para multiplexar las comunicaciones entre los EUCs (Electronic Controller Units) de los vehículos y para reducir la cantidad de arneses de cables eléctricos. Además permite compartir sensores entre los EUCs. CAN es un medio de cables de par de cobre que llegó a ser un estándar de la ISO en 1994, y es ahora de hecho un estándar en Europa para la transmisión de datos en aplicaciones automotrices, debido a su bajo costo, su robustez y su manejo del r,~tardo de la comunicación. En los automóviles actuales, CAN es usado como una red clase C para el control en tiempo real en el tren motriz y el dominio del chasis (a 250 o 500 kb/s), pero también funciona como una red SAE clase 8 para los componentes electrónicos en el dominio del cuerpo, usualmente a una velocidad de 125 kbps.. 22.
(20) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. Sobre CAN es posible segmentar los datos en diversas tramas, que pueden ser transmitidas periódicamente, aperiódicamente ó en demanda (por ejemplo bajo el paradigma clienteservidor). Una trama CAN puede ser etiquetada con un identificador, transmitido dentro de la trama, cuyo valor numérico determina la prioridad de la trama. Existen dos versiones del protocolo CAN los cuáles se diferencian en el tamaño del identificador: CAN 2.0.A (o estándar CAN) con un identificador de 11 bits y CAN 2.08 (o CAN extendido) con un identificador de 29 bits. Para las comunicaciones internas del vehículo, se usa solo el protocolo CAN 2.0A, ya que proporciona el número suficiente de identificadores (Por ejemplo el número de diferentes tramas distintas intercambiadas sobre una red CAN es menor que 2 El 1). CAN usa el código de línea NRZ (Nonreturn-to-zero) con un bit "stuffing" de longitud 5. De forma tal que no se pierda el tiempo de bit (por ejemplo el tiempo entre h emisión de dos bits sucesivos de la misma trama), las estaciones necesitan resincronizarse periódicamente y este procedimiento requiere cortes en la sefial. El bit "de relleno" es un método de codificación que permite la resincronización cuando se usa una representación NRZ de bit:, donde el nivel de la señal en el bus puede permanecer constante sobre un largo periodo de tiempo) por ejemplo en la transmisión de 000 000 ... ). Se generan cortes dentro de la trama de bits de salida de modo tal que eviten la transmisión de más de un número máximo consecutivo de bits de igual nivel (cinco para CAN). El receptor aplicara el proceso inverso y quita el relimo de la trama. CAN requiere de la capa fisica para implementar el operador lógico "ami": si al menos esta transmitiendo el bit de nivel "O" en el bus, entonces el bus está en ese estado a pesar de que otros nodos hayan transmitido el nivel de bit "I ". Por esta razón , '\)" es el valor de bit dominante del periodo, mientras que" I" es el valor de bit recesivo. El estándar de trama de datos CAN (CAN 2.0A; ver la figura 11.2) puede contener hasta 8 bytes de datos para un tamaño total de, cuando mucho, 135 bits, incluyendo todos los encabezados del protocolo así como los bits de relleno. SOF: Start Of Frame EOF: End or Frame Ack; Acknowledgement lnter: lntermission SOF. Header. Appllcation data. ... vacío. ,.. -16 bits Standard CAN (2.0A). CRC fleld. /) 0 ... 6 Bytes. Ack. Eo1= lnter. -15 bits. 3 bits 7 bit, 3 bits. 1 bit. Figura 11.2.- Formato de la trama de datos CAN. - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 23.
(21) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. Las secciones de la trama son: • El campo del encabezado ( ver figura 11.3 ), el cuál contiene el identificador de la trama, el bit de solicitud de transmisión remota (RTR) que hace la distinción entre la trama de datos (RTR puesto a O) y la trama de solicitud de datos (RTR puesto a 1) y el código de longitud de datos (DLC) usado para informar del número de bytes del campo de datos. • El campo de datos que tiene una longitud máxima de 8 bytes. • 15 bits del campo de verificación de redundancia cíclica (CRC), el cuál asegura la integridad de los datos transmitidos. • El campo de reconocimiento (Ack). En CAN, el esquema de reconocimiento solamente permite al transmisor conocer que al menos una estación, pero no necesariamente el recipiente intencionado, ha recibido la trama correctamente. • El campo de fin de trama (EOF End-Of-Frame) y el espacio de intermisión de trama, el cuál es el número mínimo de bits separando mensajes consecutivos.. O: Trama de datos 1: Trama de solicitud. DLC. Identificador. 1. ---. ~. ~~ R T Oo 1. o ---. .. . 11 bits. Oo1. R. 3 bits. .. . 4 bits. Figura 11.3.- Formato del campo de encabezado de la trama de datos CAN 2.0A Cualquier nodo CAN puede empezar una transmisión cuando el bus está vacío. Los posibles conflictos son resueltos por un proceso de arbitraje basado en prioridad, el cuál se dice que no es destructivo en el sentido de que, en el caso de transmisiones simultáneas, la trama con mayor prioridad será enviada a pesar de la contención con tramas de menor prioridad. El arbitraje es determinado por los campos de arbitraje (El identificador más el campo RTR) de los nodos en contienda. Un ejemplo de arbitraje se ilustra en la figura 11.4. Si un nodo transmite un bit recesivo en el bus mientras que otro transmite un bit dominante, el nivel resultante en el bus es dominante debido al operador "AND" realizado por la capa física. Por lo tanto, el nodo que esta transmitiendo un bit recesivo observara un bit dominante en el bus y entonces inmediatamente detendrá su transmisión. Como el identificador es transmitido "el primer bit más significativo", el nodo con el campo de identificador numérico más bajo ganará acceso al bus. Un nodo que ha perdido el arbitraje esperará hasta que el bus se encuentre libre y entonces nuevamente intenta retransmitir su trama. El procedimiento de arbitraje de CAN recae en el hecho de que un nodo envíe un monitoreo del bus mientras esta transmitiendo. La señal debe ser capaz de propagarse al nodo más remoto y regresar antes de que el valor del bit sea decidido. Esto requiere que el tiempo de bit sea por lo menos el doble que el retardo de. 24.
(22) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. propagación, el cuál limita la velocidad de datos: por ejemplo, 1 Mbps es realizable en un bus de 40m como máximo, mientras que 250 kb/s puede ser desarrollado sobre 250m. SOF Campo de arbitraje. o o o o o o. o. Nodo 1. 1 Nodo2. ffi¡,~ 1. Nivel de bus. bi ¡.¡' 0. 1. La fase de arbitraje arranca. 1°1°1°1° 1° 1° 1. 1 1 1. T. Solo el nodo1 permanece. Figura 11.4.-. La fase de arbitraje de CAN con dos nodos arranca transmitiendo simultáneamente. El nodo 2 detecta que una trama con alta prioridad que la suya esta siendo transmitida cuando la monitorea a un nivel O (por ejemplo el nivel dominante) en el bus, mientras que este envía 1 bit con un nivel 1 (por ejemplo el nivel recesivo). Despu~s de lo cuál el nodo 2 detiene inmediatamente la transmisión.. CAN tiene diversos mecanismos para detección de errores, por ejemplo, se verifica que el CRC transmitido en la trama es idéntico al CRC computado en el receptor final, que la estructura de la rama es válida, y que no ha ocurrido un error de bit de relleno. Cada estación que detecta un error envía una "bandera de error", la cuál es un tipo particular de trama compuesta de seis bits dominantes consecutivos que permite a todas las estaciones en el bus advertir el error en la transmisión. La trama corrupta de manera automática reingresa dentro de la siguiente fase de arbitraje, la cuál puede conducirla a perder su fin debido al retardo adicional. El tiempo de recuperación de error, esta definido como el tiempo desde que se detecta el error hasta el posible arranque de una nueva trama, es de 17 a 31 tiempos de bit. CAN procesa algunos mecanismos de confinamientos de falla asignados a identificar de manera permanente fallas debidas al mal funcionamiento del hardware al nivel del microcontrolador, controlador de comunicación o capa fisica. El esquema esta basado en contadores de error que son incrementados o decrementados de acuerdo a eventos particulares (por ejemplo recepción exitosa de una trama, recepción de una trama corrupta, etc.). La relevancia de los algoritmos involucrados es cuestionable, pero el principal esquema es que el nodo tiene que diagnosticar por sí mismo, lo cuál puede conducir a la M detección de algunos errores críticos. La falta de facilidades adicionales de tolerancia a fallas, hace que CAN no sea confiable para aplicaciones de seguridad crítica como algunas de los futuros sistemas "x-bywire". Porque por ejemplo un solo nodo puede perturbar el funcionamiento de toda la red enviando mensajes fuera de su especificación (por ejemplo longitud y periodo de tramas). - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 25.
(23) Capítulo 11 : Rei.les integradas al automóvil y redes de telecomunicaciones. El estándar CAN únicamente define la capa física y la capa de enlace de datos (OLL- Data link Layer). Algunos protocolos de alto nivel han sido propuestos, por ejemplo, para estandarizar procedimientos de arranque, implementación de segmentación de datos, o enviar mensajes periódicos.. 11.2.1.2. VAN ( Vehicle Area Network). VAN es muy similar a CAN (en el formato de datos y la velocidad de datos), pero posee algunas características adicionales y diferentes que son ventajosas desde un punto de vista técnico (por ejemplo un nodo al cuál le solicitan un dato, responde en la misma trama que contiene la solicitud). VAN fue usado por los fabricantes de automóviles franceses PSA en el dominio del cuerpo, pero como este no fue adoptado por el mercado, fue abandonado y reemplazado por CAN.. 11.2.1.3. 11850. J 1850 es un bus SAE de prioridad clase 8 que fue adoptado en los Estados Unidos para comunicaciones sin requerimientos fuertes de tiempo real, como el control de la carrocería o diagnósticos. Están definidas dos variantes de J 1850: una versión de un solo cable a 10.4 kb/s y una versión de 2 cables a 41.6 kb/s. La tendencia en los nuevos diseños parece ser remplazar J 1850 por CAN o por una red de bajo costo como UN.. 11.2.2. Redes disparadas Networks). por. tiempo. (Time-Triggered. Entre las redes de comunicación, como las que se han descrito anteriormente, una distingue a las redes de disparo de tiempo (time-triggered networks), donde las actividades son manejadas por el progreso del tiempo, y algunos eventos "disparados", donde las actividades son manejadas por la ocurrencia de eventos. Ambos tipos de comunicación tienen ventajas, pero una considera que, en general, las dependencias son más fáciles de asegurar usando un bus por disparo de tiempo. Esto explica que, actualmente, solo los sistemas de comunicación de disparo de tiempo están siendo considerados para el uso en las aplicaciones "x-by-wire". En este caso los protocolos de acceso múltiple basados en TOMA están particularmente bien situados; ellos proporcionan acceso deterministico al medio (el orden de las transmisiones se define estáticamente en el diseño del tiempo), y en los tiempos de respuesta conjuntos. Más sin embargo, sus transmisiones regulares de mensajes pueden ser usadas como latidos para detectar fallas en la estación. Las tres redes basadas en TOMA que son candidatas para soportar aplicaciones "x-by-wirc" son TTP/C, Flex Rclay y TTCAN.. 26.
(24) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. 11.2.2.1. El protocolo TTP/C. El protocolo de disparo de tiempo TTP/C, es una parte central de la arqu.tectura de disparo de tiempo (TT A- Time-Triggered Architecture), y posee numerosas características y servicios relacionados a la dependencia. La arquitectura TT A y el protocolo TTP/C que han sido diseñados y estudiados extensivamente en la Universidad de Tecnología ce Viena, Austria. En una red TTP/C, la transmisión se lleva a cabo sobre canales redundantes y cada canal transporta su propia copia del mismo mensaje. En el nivel de acceso al medio (MAC), el protocolo TTP/C implementa un esquema síncrono de TOMA: las estaciones o nodos tienen acceso al bus en un estricto orden secuencial y deterrninístico y cada estación usa el bus por un periodo constante de tiempo llamado slot, durante el cuál tiene que transmitir una trama. La secuencia de los slots permite que todas las estaciones accedan el bus a un tiempo, esta operación es llamada ronda TOMA.. 11.2.2.2. El protocolo FlexRelay. Un consorcio de las principales compañías en el campo de la industria automotriz desarrolló el protocolo FlexRelay. La red FlexRelay es muy flexible respecto a la topología y soporte a la redundancia de transmisión. Puede ser configurada como un bus, una estrella o una multiestrella. En el nivel de acceso (MAC), FlexRelay define un ciclo de cornunicac10n como la concatenación de una ventana de disparo por tiempo ( o estático) y ura ventana de evento disparado (o dinámico). Los ciclos de comunicación son ejecutados periódicamente. La ventana de tiempo de disparo usa un protocolo TOMA MAC; la principal diferencia con TTP/C es que una estación en FlexRelay puede poseer diversos slot:; en una ventana de disparo de tiempo, pero el tamaño de todos los slots es idéntico. En la parte del disparo por evento del ciclo de comunicación, el protocolo es Flexible TOMA (FTOMA): el tiempo es dividido en pequeños mini-slots llamados (no necesariamente consecutivos), y puede arrancar la transmisión de una trama dentro de cada uno de sus propios mi nislots. Un minislot permanece vacío s;1 la estación no tiene nada que transmitir lo cuál genera una perdida de ancho de banda. El protocolo MAC FlexRelay es más flexible que el MAC TTP/C, dado que en la ventana estática los nodos son asignados tanto como slots son necesarios, y dentro de la parte dinámica del ciclo de comunicación las tramas solo se transmiten si es necesario. De una manera similar como con TTP/C, ,~I ciclo de la estructura de comunicación es almacenada estáticamente en los nodos, sin embargo, a diferencia de TTP/C, los cambios de modo con una diferente agenda de comunicación para cada modo no es posible. En la especificación de FlexRelay, se argumenta que el protocolo provee una dependencia escalable por ejemplo la habilidad para operar en configuraciones que proveen varios grados de tolerancia a fallas.. - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27.
(25) Capítulo 11 : Redes integradas al aulomóvil y redes de telecomunicaciones. 11.2.2.3. El protocolo CAN disparado por tiempo (TimeTriggered CAN (TTCAN) Protocol). El protocolo CAN por disparo de tiempo (TTCAN) es un protocolo de comunicación desarrollado por Robert Bosch GMBH en el tope de la capa física y de la capa de enlace de datos. TTCAN usa el estándar CAN pero, además, requiere que los controladores tengan la posibilidad para deshabilitar las retransmisiones automáticas de tramas por los errores de transmisión y proveer a las capas superiores con el punto en el tiempo al cuál el primer bit de la trama fue enviado o recibido. La topología de bus de la red , las características de soporte de la transmisión, el formato de trama , así como la velocidad máxima de datos -1 MBPS- son impuesta por el protocolo CAN.. II.2.3. Redes automotrices de Automotive Networks). bajo. costo. (Low-Cost. Diversos buses de redes han sido desarrollados para satisfacer completamente las necesidades para comunicaciones de baja velocidad/bajo costo dentro de los subsistemas básicos de mecatrónica generalmente hechos de un ECU y su conjunto de sensores y actuadotes. Dos representantes de este tipo de redes son LIN y TTP/ A. El objetivo de bajo costo se logra no solamente por la simplicidad de la comunicación de los controladores sino también porque los requerimientos de comunicación de manejo de los microcontroladores son reducidos (por ejemplo baja potencia computacional, una pequeña cantidad de memoria, oscilador de bajo costo). Las aplicaciones típicas que involucran a estas redes incluye controles de puertas (por ejemplo los seguros de las puertas y la apertura/cerradura de ventanas) o controles de asiento (por ejemplo los motores de posiciones de asientos, control de ocupantes). Además de las consideraciones de costo, una arquitectura de comunicación jerárquica, incluyen un backbone del tipo CAN y diversas subredes como UN, que pennite la reducción de carga de tráfico total sobre el backbone. Las redes LIN y TTP/A son del tipo maestro-esclavo donde un solo nodo maestro, que debe de poseer una precisa y estable base de tiempo, coordina la comunicación en el bus: a un esclavo solo se le permite enviar un mensaje cuando es "polcado". Siendo más precisos, el dialogo comienza con la transmisión desde un maestro de un "comando de trama" que contiene el mensaje solicitado enviado por uno de los esclavos por el maestro en sí mismo (por ejemplo el mensaje puede ser producido por el maestro).. 28.
(26) Capítulo 11: Redes integradas al automóvil y redes de telecomunicaciones. 11.2.3.1. LIN. LIN es un sistema serial de comunicación de bajo costo usado como una red SAE de clase A, donde las necesidades en términos de comunicación no requieren la implementación de redes de multiplexación de un gran ancho de banda como CAN. Un cluster de LIN consiste de un nodo maestro y diversos esclavos conectados a un nodo común. Para llevar a cabo una implementación de bajo costo, la capa fisica esta definida como un solo cable con una velocidad de datos limitada a 20 Kb/s debido a las limitaciones de EMI. El nodo maestro decide como y cuál nodo maestro puede ser transmitido de acuerdo a la tabla de programación. La tabla de programación es el elemento principal en LIN; la cuál contiene una lista de tramas que serán enviadas y asociadas a slots de la trama, asegurando la determinación en el orden de la transmisión. Al momento que la trama es agendada para la transmisión, el maestro envía un encabezado (un tipo de solicitud de transmisión o trama de comando) invitando a un nodo esclavo a enviar sus datos en respuesta. Cualquier nodo interesado puede leer una trama de datos transmitido en el bus. Como e:1 CAN, cada mensaje tiene que ser identificado; se dispone de 64 identificadores distintivos de mensajes. LIN define cinco diferentes tipos de tramas; incondicional, disparado por evento, esporádico, de diagnóstico y definidos por el usuario. Las tramas del último tipo se les asigna un valor de identificador específico y se pretende sean usados en un tipo de aplicación específico que no se describe en la e:,pecificación. Los primeros tres tipos de tramas son usados para transmitir las señales. Las tramas incondicionales son un tipo de tramas usuales en el diálogo maestroesclavo y siempre son enviadas en sus slots de tramas. Las tramas esporádicas son tramas enviadas por el ma,estro, solo si al menos una señal que compone la trama ha sido actualizada. Usualmente, múltiples tramas esporádicas son asignadas al mismo slot de trama, y la trama de mayor prioridad que tiene una actualización de señal es transmitida. Una trama disparada por evento es usada por el maestro de buena voluntad para obtener una lista de diversas señales de diferentes nodos. Un esclavo puede responder al maestro solamente si las señales que produce han sido actualizadas, esto da como resultado ahorro en anchos de banda si las actualizaciones no ocurren frecuentemente. Si más de un esclavo responde, puede ocurrir una colisión. El maestro soluciona las colisiones a través de solicitar todas las señales en la lista una por una. Un ejemplo típico del uso de transferencia por disparo de evento se da en el monitor de seguros de puertas en un sistema central de seguros. Es muy raro que múltiples pasajeros presiones un seguro simultáneamente, en lugar de polcar cada una de las cuatro puertas, una sola trama de evento disparado puede ser usado. Por supuesto, en el raro evento cuando más de un escalvo responde, una colisión puede ocurrir. Cuando el maestro resuelve la colisión enviando uno a uno de los identificadores individuales de la lista durante los slots sucesivos de tramas reservados para el poleo de la lista. Finalmente, las tramas de diagnóstico tienen un tamaño fijo de 8 bytes con identificadores de valor fijo para solicitudes de maestros y respuestas de esclavos y siempre conteniendo datos de diagnóstico o configuración cuya interpretación es definida en la especificación. Es importante hacer notar que LIN ofrece servicios para enviar nodos a un modo de descanso "sleep mode" (a través de una trama de diagnóstico especial llamada "go-to-sleep-command"). - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 29.
(27) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. y para "despertarlo, con lo que se optimiza el consumo de energía, especialmente cuando el motor no esta funcionando, lo cuál es una cuestión meramente del contexto automotriz.. 11.2.3.2. La red TTP/A. Así como TTP/C, TTP/ A persigue los mismos objetivos y comparte los mismos principios de diseño de UN, y ofrece, al nivel de controlador de comunicación, algunas funciones similares - en particular en las áreas de las capacidades de conectar y usar "p/ug-and-play" y servicios de diagnósticos en línea "online ". TTPI A implementa el clásico diálogo maestro-esclavo, termino de la ronda maestro-esclavo, donde el esclavo responde las solicitudes del maestro con una trama de datos de longitud fija en el campo de carga útil de 4 bytes. Las rondas "multipartner" habilitan diversos esclavos para enviar hasta una cantidad de 62 bytes de datos después de cada única trama de comando. Una ronda de ráfaga '"/woadcast" es una ronda especial maestro-esclavo en la cuúl los esclavos no envían datos, que se usan, por ejemplo para la implementación de servicios de descanso y despertar ("sleep/wake-up "). La velocidad de datos en un solo cable de transmisión soporta, así como para UN, igual a 20 kb/s, pero otros soportes de transmisión pem1iten velocidades de datos más altas en lo posible. TTP/ A, no se usa actualmente en la producción de los vehículos.. 11.2.4. Redes Multimedia. Muchos protocolos han sido adaptados o concebidos específicamente para transmitir una gran cantidad de datos como se necesite de acuerdo a las aplicaciones multimedia en los sistemas automotrices.. 11.2.4.1. MOST. Es un desarrollo de red multimedia que fue iniciado en 1998 por la organización cooperativa MOST (un consorcio de fabricantes de automóviles y proveedores de componentes). MOST proporciona un medio de comunicación punto a punto para la transferencia audio y video con una velocidad de transferencia de 24.8 Mbps., esta red soporta aplicaciones de usuario final como radios, sistemas de posicionamiento global (GPS), pantallas de video y sistemas de entretenimiento. La capa fisica de transmisión de MOST es a través de una fibra óptica de plástico (POFPlastic Optical Fiher), que proporciona una mejor resistencia a la interferencia electromagnética (EMI-ElectroMagnetic lnterference) y mayores velocidades de transmisión que las que se alcanzan en cables de cobre.. 30 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -.
(28) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. 11.2.4.2. La Red IDB-1394. IDB-1394 es una versión automotriz de IEEE 1394 para aplicaciones multimedia y telemáticas de vehículos, conjuntamente desarrollada por el forum IDB la asociación de comercio 1394. La arquitectura del sistema de IDB-1394 permite a los dispositivos electrónicos de consumo existentes IEEE 1394 intcr-operar con los dispositivos existentes incluidos en los automóviles. IDB-1394 soporta velocidades de transmisión de IOO Mbps sobre un par trenzado o fibra óptica. Con un número máximo de dispositivos conectados que están limitados a 63 nodos. Desde el punto de vista de la velocidad de transmisión y la interoperabilidad con los dispositivos electrónicos existentes IEEE 1394, IDB -1394 es un serio competidor de la tecnología MOST.. 11.2.5. Redes Inalámbricas (Wireless). Una red inalámbrica es un sistema flexible de comunicaciones de dato:;, que utiliza medios inalámbricos tales como tecnología de radiofrecuencia para transmitir y recibir datos sobre el aire, reduciendo al mínimo la necesidad de las conexiones con cable. Las redes inalámbricas se utilizan más bien para aumentar y no para sustituir las redes alámbricas y se utilizan de manera más común para proveer las últimas etapas de la conectividad entre un usuario móvil y una red alambica. Las redes inalámbricas utilizan ondas electromagnéticas para transmitir la información de un punto a otro sin neo:esitar de ninguna conexión física. Las ondas de radio se conocen como portadoras de radio porque simplemente realizan la función de entregar energía a un receptor alejado. Los datos que son transmitidos se sobreponen en la portadora de radio de forma tal que puedan ser extraídos exactamente igual en el extremo de recepción. Una vez que los datos se sobreponen (modulan) sobre la portadora de radio, la señal de radio ocupa más de una sola frecuencia, debido a que la frecuencia o la velocidad de bits de la modulación de la información se agrega a la transmisión. Múltiples portadores de radio pu{:den existir al mismo tiempo sin interferir uno con otro si las ondas de radio se trarsmiten en diversas radiofrecuencias. Para extraer los datos, un receptor de radio se sintoniza a una radiofrecuencia mientras que rechaza el resto de las frecuencias. La señal modulada entonces es recibida en el demodulador y los datos son extraídos de la señal. Las redes inalámbricas ofrecen las siguientes ventajas de productividad, conveniencia, y costo sobre las redes de alámbricas tradicionales. Movilidad: provee a los usuarios móviles el acceso a la información en tiempo real de modo que puedan moverse alrededor de la red sin ser desconectados. Esta movilidad apoya las oportunidades de productividad y oportunidades de servicio que no son posibles con las redes alámbricas. Velocidad y simplicidad de instalación: la instalación de un sistema inalámbrico puede ser rápido y fácil y puede eliminar la necesidad de tender cable a través de las paredes y de los techos. - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 31.
(29) Capítulo 11 : Redes integradas al automóvil y redes de telecomunicaciones. Alcance de la red: la red se puede extender a los lugares que no se pueden enlazar con alambre Más flexibilidad: las redes inalámbricas ofrecen más flexibilidad y se adaptan fácilmente a los cambios en la configuración de la red. Costo reducido de la propiedad: mientras que la inversión inicial requerida para el hardware inalámbrico de la red puede ser más alta que el costo de hardware alámbrico de la red, los costos de la instalación y los costos totales del ciclo de vida pueden ser perceptiblemente más bajos en ambientes dinámicos. Escalabilidad: los sistemas inalámbricos se pueden configurar en una variedad de topologías para resolver las necesidades de usos y de instalaciones específicos. Las configuraciones de las redes inalámbricas se pueden cambiar fácilmente, existe una amplia gama de este tipo de redes, redes de corto alcance para atender a un número pequeño de usuarios y cubren pequeñas áreas de cobertura y las redes de gran infraestructura que proveen movilidad sobre un área amplia. Bluetooth y 802.11 b tienen el potencial de evolucionar dramáticamente conforme la gente utiliza este tipo de dispositivos para conectarse y comunicarse en la vida diaria. Bluetooth es una tecnología de baja potencia y de corto alcance para el reemplazo del cable; permite a la gente comunicar sus dispositivos móviles de comunicación dondequiera que los traigan. Inversamente, 802.1 1b es una tecnología de velocidad moderada basada en Ethernet; provee a los usuarios por medio de tecnología inalámbrica acceso a la red de una organización cuando se encuentra dentro de un campus o edificio de una organización. Estas tecnologías comparten la banda de 2.4 Gigahertz, tienen algunos usos potencialmente traslapados, estas tecnologías no compiten y se pueden combinar con éxito para el uso corporativo.. 11.3 Comunicaciones de Corto Alcance Actualmente existen muchos estándares para conectar varios dispositivos. Al mismo tiempo, cada dispositivo tiene que soportar más de un estándar para hacerlo interoperable entre diferentes dispositivos. En los últimos años, muchos estándares y tecnologías de conectividad inalámbrica (wireless) están emergiendo. Estas tecnologías permiten a los usuarios conectarse a un amplio rango de servicios de cómputo y dispositivos de telecomunicaciones fácilmente, sin la necesidad de comprar, portar o conectar cables. Estas tecnologías dan la oportunidad para rápidas conexiones "ad-hoc" y dan la posibilidad de conexiones automáticas entre dispositivos. Esto eliminará la necesidad de comprar cableado propietario para conectar dispositivos individuales, así como crear la posibilidad de usar datos móviles en una variedad de aplicaciones. Las redes cableadas han sido muy exitosas en los últimos años y ahora con las tecnologías de conectividad inalámbrica, las redes de área local inalámbricas (wireless LAN's) han comenzado a emerger con mucha más fuerza y flexibilidad que las redes alternativas alámbricas.. 32.
Figure


+7


Documento similar
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
No había pasado un día desde mi solemne entrada cuando, para que el recuerdo me sirviera de advertencia, alguien se encargó de decirme que sobre aquellas losas habían rodado
Luis Miguel Utrera Navarrete ha presentado la relación de Bienes y Actividades siguientes para la legislatura de 2015-2019, según constan inscritos en el
En cuarto lugar, se establecen unos medios para la actuación de re- fuerzo de la Cohesión (conducción y coordinación de las políticas eco- nómicas nacionales, políticas y acciones
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
D) El equipamiento constitucional para la recepción de las Comisiones Reguladoras: a) La estructura de la administración nacional, b) La su- prema autoridad administrativa
b) El Tribunal Constitucional se encuadra dentro de una organiza- ción jurídico constitucional que asume la supremacía de los dere- chos fundamentales y que reconoce la separación
