La evaluación de los RPAS se realizó en misiones de vuelo autónomo a una velocidad constante de 1 m/s, a una altitud de 20 m y con un viento no mayor a 5 km/h. También se planificó una misión de vuelo con el prototipo, donde se obtuvieron imágenes RGB que fueron corregidas con puntos de control en tierra, y la densa nube de puntos generada se comparó con un levantamiento topográfico GPS posprocesado, con error absoluto y estándar 0.020. y 0,024 mo
INTRODUCCIÓN GENERAL
Introducción
Una variedad de sensores y software para procesamiento y análisis evalúan el estado de cultivos y plantas (Gerard, 2018), proporcionan un medio para monitorear y procesar cultivos mediante el análisis de imágenes obtenidas por dispositivos que no están en contacto directo (usando sensores remotos) (Yao et al. ., 2019; Nhamo, Magidi, Nyamugama y Clulow, 2020; Messina y Modica, 2020). GyuJin et al., (2020) mencionan que existen varios proyectos de código abierto que abordan la construcción de RPAS utilizando controladores de vuelo como Pixhawk, Naza y Navios para su control, permitiendo la creación de sistemas vehiculares, autónomos y confiables.
Objetivos
- Objetivo general
- Objetivos específicos
REVISIÓN DE LITERATURA
Agricultura digital
Genera decisiones basadas en el análisis y procesamiento de la información recopilada, mejorando la producción, la eficiencia y la rentabilidad (Gomes De Macedo et al., 2018). La agricultura digital utiliza nuevas tecnologías de la información y las comunicaciones (FAO, 2018), como el Internet de las cosas, la computación en la nube, la visión por computadora, el aprendizaje automático, la inteligencia artificial, los sistemas de información geográfica y los big data. (Gomes De Macedo et al., 2018).
RPAS en la Agricultura
- Aplicaciones agrícolas de RPAS
Debido a su alto nivel de precisión (tamaños de píxeles inferiores a un centímetro), permiten monitorear el estado de las plantas y partes de ellas (Hassler & Baysal-Gurel, 2019; Nhamo et al., 2020). Los procesos fotogramétricos permiten modelar la superficie del dosel a escala detallada de las plantas, con precisión centimétrica, para obtener propiedades físicas tales como: parámetros geométricos (altura, forma, volumen), propiedades espectrales (cobertura del dosel o textura espectral de las plantas). el dosel), propiedades fisiológicas (fotosíntesis), indicadores de estrés abiótico/biótico (conductancia estomática, temperatura de la copa, potencial hídrico de la hoja (índice de senescencia), clorofila, biomasa, contenido de pigmentos, nutrientes, proteínas, índice de área foliar (LAI), diferencia normalizada Índice de Vegetación (NDVI), Índice de Estrés Hídrico de Cultivos (CWSI), Índice de Nutrición de Nitrógeno (NNI), Modelos de Elevación o Modelos de Elevación Digitales (DEM) (Yang et al., 2017; Gerard, 2018; Hassler & Baysal-Gurel, 2019; Nhamo et al. ., 2020; Poley & McDermid , 2020), estimación de tamaños de árboles, ubicación y número de plantas (Sarabia-López, 2019).

Sistema de Aeronave Pilotada a Distancia RPAS
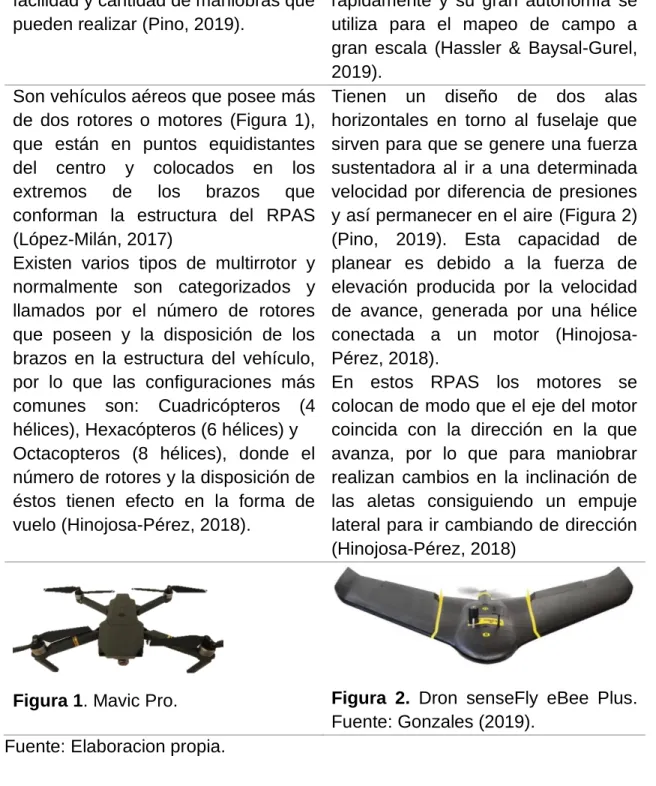
- Tipos de RPAS utilizados en la agricultura
- Sistemas y componentes de los RPAS
- Quadrotor o Cuadricóptero
- Dinámica y control de los Cuadricópteros
- Requerimientos para el diseño Cuadricópteros
- Vibraciones
- Variables de control “PID”
- Patentes
- Normativa y legislación
El sistema de control de un RPAS es responsable de la estabilidad, la orientación y la inclinación deseada de la unidad según los valores recibidos a través del sistema de comunicación, el cual luego de su análisis y corrección envía las señales PWM al Speed Controladores (ESC) de los Motores. El sistema de vuelo controla el movimiento variando la velocidad de rotación de los motores mediante controladores electrónicos de velocidad (ESC), pudiendo así realizar giros, elevaciones, rotaciones o mantener una posición estática (Lorduy-Hernández, 2017).
Topografía con RPAS (Proceso fotogramétrico)
La ubicación del GCP debe ser homogénea en el área de interés, se recomienda colocar uno en el centro del área de estudio para aumentar la calidad y precisión de la reconstrucción, y con el número de puntos de control al menos tres ( se recomiendan al menos cinco o seis). El software de planificación de la misión designa un polígono que delimitará el área de estudio y dentro de él se creará una ruta o plan de vuelo basado en las coordenadas geográficas (waypoints) que el RPAS recorrerá en secuencia, desplazándose con respecto a la posición. determinado por GPS incorporado (Lorduy-Hernández, 2017). En esta fase se utiliza un software de fotogrametría especializado que integra información de cada imagen georreferenciada y puntos de apoyo del terreno para producir un modelo tridimensional de la superficie.
Luego de georreferenciar las imágenes y crear los puntos de enlace, el siguiente paso es la compresión de la nube de puntos, donde la información de geolocalización interna se integra en las fotos y se cargan las coordenadas conocidas de los puntos de control de apoyo terrestre. , agregado por el usuario (ubicado en las fotos) (Zafra-Granados, 2018; Claros-Zelaya, Guevara-Aguilar, & Pacas-Cruz, 2016).

Bibliografía
Santigo de Chile, Chile: Universidad de Chile, Facultad de Ciencias Físicas y Matemáticas, Departamento de Ingeniería Eléctrica. Madrid, España: Universidad Politécnica de Madrid, Escuela Técnica Superior de Ingeniería de Montes, Montes y Medio Ambiente. Ciudad Real, España: Universidad de Castilla-La Mancha Escuela Superior de Informática Departamento de Ingeniería Eléctrica, Electrónica, Automática y Comunicaciones.
Desarrollo de algoritmos de seguimiento de trayectoria de cuadrotor utilizando técnicas modernas de control de álgebra lineal.
DESARROLLO DE UN SISTEMA DE AERONAVE PILOTADA A
Resumen
Abstract
Introducción
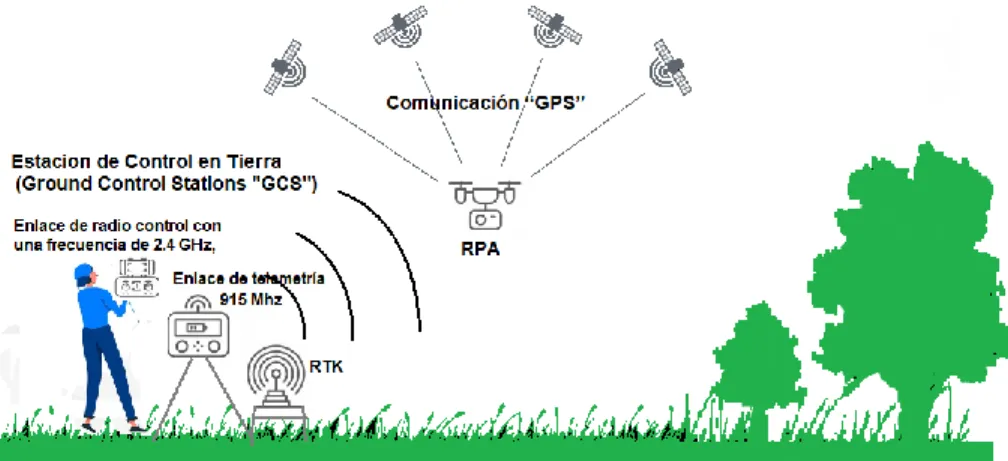
La tecnología actual proporciona sistemas de control como el Pixhawk, un hardware de sistema de control de vuelo y navegación civil utilizado en la investigación y el desarrollo de vehículos autónomos. El controlador puede permitir que el RPAS vuele de forma autónoma, gestione todos los controles de vuelo y navegación (Pei-Hsiang, Der-Ming y Jaw-Kuen, 2019), y también puede comunicarse con una estación de control en tierra (vía telemetría) y enviar imágenes. vídeo, o información sobre el estado del RPAS, como: posición, altitud, velocidad, batería y consumo de energía (Dávila, Orna, Rosales y Ávalos, 2017). El diseño de RPAS con sistemas abiertos es fundamental para la investigación y desarrollo de nuevas aplicaciones en agricultura de precisión, haciendo rápido y sencillo el ensayo e implementación de diferentes sensores (instrumentación) (Santoyo-Luévano, Cázares-Vieyra, Avilés-Cruz, Villegas- Cortez y Zúñiga-López, 2016).
Teniendo en cuenta las características necesarias que deben tener las aeronaves para su uso en agricultura de precisión, el objetivo de este trabajo es diseñar, construir y evaluar un RPAS, un tipo cuadricóptero con un sistema que permite realizar vuelos autónomos y estables. imágenes georreferenciadas de forma secuencial a través de la instrumentación de un sensor RGB.
Materiales y métodos
- Diseño del RPAS
- Construcción del RPAS
- Evaluación del prototipo RPAS
- Análisis económico
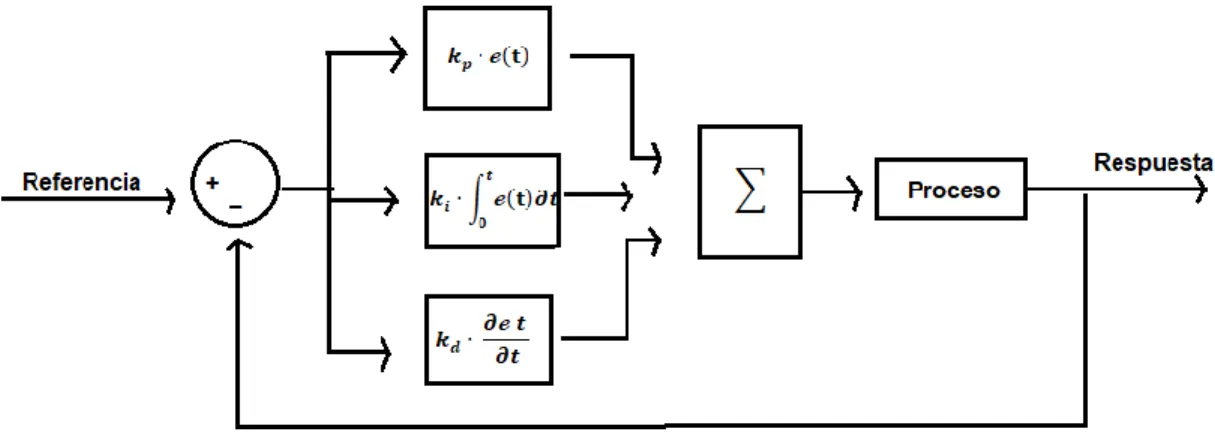
El GPS estaba ubicado en el lado derecho del controlador de vuelo y asegurado con tornillos. 66 Los cables de control ESC se colocan en los puertos PWM del controlador (1-4, respectivamente), el cable de disparo automático de la cámara se conecta al puerto 51 y el receptor de radio control al puerto RC (Figura 12). En la Figura 16 se desarrolla el diagrama de control PID del controlador de vuelo pixhawk, que se utiliza para corregir la estabilidad y la altitud.
Diagrama del control PID, utilizado para corregir altitud y ángulos, del controlador de vuelo pixhawk.

Análisis del funcionamiento del prototipo RPAS
Para evaluar este factor se realizaron dos misiones de vuelo, mostradas en la Figura 23 y Figura 24, donde se puede apreciar el swing para “Roll” y “Pitch” en los vuelos autónomos de los RPAS. La Figura 25 muestra que la vibración promedio (de los tres vuelos) está entre 6 y 16𝑚. El control PID realizó la corrección de la altura de vuelo y mantuvo la altura en 20m con un error de ±0,5m, error aceptado en fotogrametría.
82 El comportamiento de los valores de control PID de los ejes de cabeceo (eje Y) y balanceo (eje X) se representa en la Figura 28 y la Figura 29.
Conclusiones
Bibliografía
Procedimiento de adquisición de datos fotogramétricos mediante dispositivos controlados remotamente, como herramienta de evaluación de estabilidad de taludes y difusión con Realidad Aumentada. NORMA oficial mexicana NOM-107-SCT3-2019, que establece los requisitos para la operación de un Sistema de Aeronaves Pilotadas a Distancia (RPAS) en el espacio aéreo mexicano.
EVALUACIÓN DE UN PROTOTIPO DE RPAS PARA EL
Resumen
Abstrac
Introducción
89 La fotogrametría permite determinar las propiedades geométricas de objetos o situaciones espaciales, a partir de imágenes con superposiciones que generan una visión estereoscópica (información tridimensional), por lo que es una técnica de medición de coordenadas 3D, que fotografía y puntos de referencias topográficas sobre el suelo (Florentino-Soriano, 2017). En aplicaciones topográficas, la fotogrametría permite medir grandes áreas de forma remota y rápida, y también genera una alta densidad de puntos del terreno en modelos digitales. Considerando las características necesarias para la fotogrametría, utilizando RPAS y la ventaja que representaría en la nivelación de terrenos agrícolas, el objetivo de este trabajo fue evaluar un prototipo de RPAS para levantamiento topográfico, basado en imágenes RGB. , incluidos los puntos de control terrestre.
Materiales y métodos
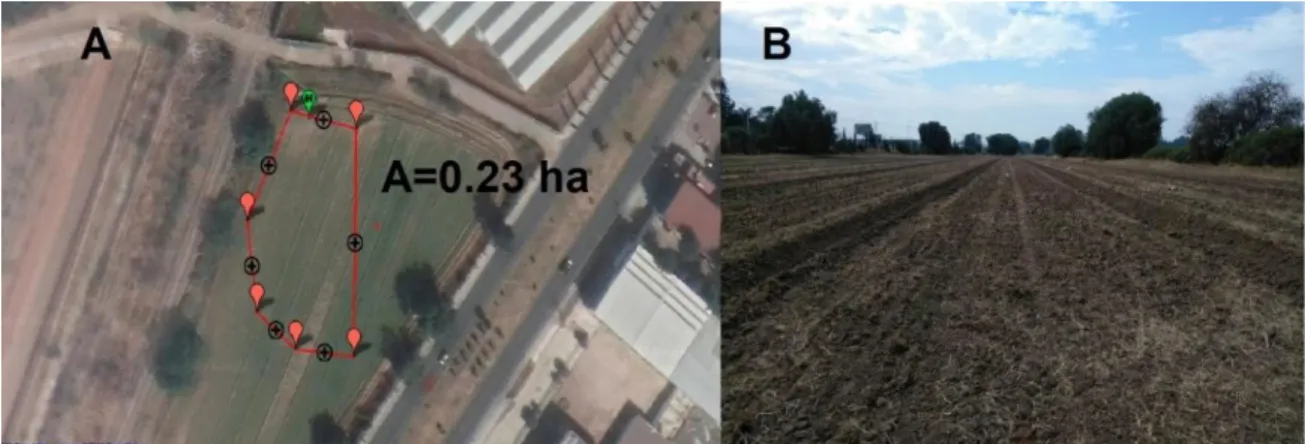
- Parcela experimental
- Prototipo de RPAS
- Levantamiento topográfico GPS
- Proceso fotogramétrico
- Procesamiento de datos GPS en postproceso
- Procesamiento digital de las imágenes
- Evaluación
Para la corrección de las coordenadas de posición y altura se utilizaron los datos de la Red Geodésica Nacional Activa (RGNA) del Instituto Nacional de Estadística y Geografía (INEGI), específicamente la estación ICMX ubicada en las coordenadas N O, con una altura geodésica de 2267.252. . metro. A) Sistema Trimble GNSS B) Receptor GPS RGNA Figura 3. Los datos de las coordenadas X, Y y Z de los puntos GPS observados en campo contienen un error de posicionamiento (Claros-Zelaya, Guevara-Aguilar, . & Pacas-Cruz, 2016), por lo tanto es necesario realizar una corrección mediante el posprocesamiento de la información recibida. Para corrección de /geo2/rgna/), para.
El segundo criterio de ajuste fue cuantitativo, para ello se realizó un análisis de la frecuencia de errores absolutos y se calcularon los parámetros estadísticos de error relativo, error estándar y error absoluto, que son indicadores de la distribución entre los valores de altura geodésica. con el prototipo RPAS.
Resultados y discusión
En la Figura 11 se observa que la altura geodésica del GPS, en la mayoría de los casos (22 puntos), es mayor que la altura geodésica del modelo digital, por lo tanto el 63% de los puntos obtenidos a través del GPS de levantamiento sobreestiman la altura geodésica obtenida. con el modelo digital, resultado del procesamiento digital de las imágenes tomadas con el prototipo RPAS. 99 En los errores calculados a partir de los puntos de muestra de la encuesta, el valor medio general del error absoluto fue de 2 cm, el error estándar fue de 2,3 cm y el error relativo fue de 0,00089. Lo que indica que la precisión es alta, muy similar a los valores obtenidos con un sistema GNSS en tiempo real en geodesia.

Conclusiones
Bibliografía
UAV: (Vehículo Aéreo No Tripulado), UAS (Unmanned Aircraft System): Sistema de aeronave no tripulada. OPTIMIZACIÓN DE LA ASIGNACIÓN DE RECURSOS RADIO BASADOS EN INFORMACIÓN DE RUTA DE VUELO DE VEHÍCULOS AÉREOS NO TRIPULADOS. DISPOSITIVO DE PRUEBA DE ALGORITMOS DE MEDICIÓN Y CONTROL DE POSE DE VEHÍCULOS AÉREOS NO TRIPULADOS.
El piloto del RPAS debe tener en todo momento el control sobre la trayectoria de vuelo del dron.