DISEÑO DE UNA SERIE DE COMPONENTES MECÁNICOS PARA CONVERTIR UN ASCENSOR TELESCÓPICO EN YESO DE ROCA. Operando en minería subterránea, la instalación Rock Scaler elimina rocas sueltas del embalse estancado para crear un área de trabajo segura. Por otro lado, no sólo se producen muertes por lanzamiento manual de piedras.
En este contexto, esta tesis cobra relevancia, ya que realiza el diseño y selección de un conjunto de componentes mecánicos para convertir el equipo de un montacargas telescópico en un removedor de rocas (Scaler) a un precio accesible para empresas mineras que no pueden obtenerlo. .
MARCO TEÓRICO
Tipos de desatado de rocas
- Desatado manual
- Desatado mecanizado
Fuente: Un aporte al estudio de los accidentes fatales por caída de rocas: el caso de la minería peruana [3]. El Scaler se caracteriza por ser un equipo robusto capaz de trabajar en condiciones de humedad, polvo y terreno rocoso [5]. Existen dos tipos de chasis compacto y articulado centralmente, este último diseñado con el objetivo de aumentar el ángulo de giro ya que la minería subterránea se caracteriza por caminos estrechos [14].
En cuanto al brazo hidráulico, este se posiciona dentro del ciclo minero en minería subterránea como se muestra en la Figura 1.2 [5].
Desatadores de rocas mecánicos (Scaler)
Elevador Telescópico Bobcat modelo T40140
Brazo telescópico
- Análisis de fuerzas en el brazo telescópico
- Cálculo de los esfuerzos entre las secciones de contacto del brazo
- Esfuerzo normal de flexión global
- Esfuerzo de flexión local
El diagrama de las fuerzas en el sistema del ala con sus secciones para las nueve partes se muestra en la figura 1.10. Usando estas dos ecuaciones, se puede calcular el momento flector en cualquier sección transversal del brazo telescópico y la tensión de flexión normal se puede calcular a partir de la siguiente ecuación. La tensión de flexión local se determina analizando la deflexión en una parte de la estructura del ala teniendo en cuenta las cargas que interactúan con ella.
Podríamos utilizar la teoría de la pared delgada; porque el espesor de la placa del brazo es menor que el ancho y el largo de la placa.

Hidráulica del Brazo telescópico
- Circuito Hidráulico
- Ciclo de trabajo hidráulico para rotar el brazo
- Cálculo de la fuerza sobre el bastidor
16 Un actuador de doble acción, llamado TBA, es responsable de variar la inclinación del brazo de 0° a 70°, como se muestra en la Figura 1.13. La Figura 1.15 muestra una comparación entre la variación del flujo y la presión experimental simulada con el software LMS imagine Lab AMESim [27]. La Figura 1.16 muestra las señales de presión para la ubicación del brazo hidráulico; También muestra el cambio de presión en diferentes momentos.
La relación entre la posición del brazo θ y la posición del actuador α se puede determinar en la Figura 1.17.

Rodamiento de giro
- Estudio Geométrico del rodamiento de giro
- Análisis teórico de carga y ángulo de contacto en el rodamiento de giro
- Modelo entre la pista de rodadura y elemento rodante
- Modelo multiparamétrico por elementos finitos
La Figura 1.22 muestra un sistema de carga convencional que funciona con un rodamiento giratorio [30]. Fuente: Capacidad de carga estática general para el diseño y selección de nuestros rodamientos giratorios de contacto puntual: cálculos de elementos finitos y validación de modelos teóricos. Fuente: Evaluación de carga estática general para el diseño y selección de rodamientos de giro: modelo teórico y de validación de cálculos de elementos finitos [30].
Fuente: Valor de carga estática general para el diseño y selección de rodamientos de giro: modelo de validación de cálculos teóricos y de elementos finitos [30].
![Figura 1.20 Geometría del rodamiento de giro con cuatro puntos de contacto Fuente: Ángulo de transporte y capacidad de transporte de un rodamiento giratorio [32]](https://thumb-us.123doks.com/thumbv2/123dok_es/12312182.0/40.892.278.618.386.573/geometría-rodamiento-contacto-transporte-capacidad-transporte-rodamiento-giratorio.webp)
Acero al carbono
- Soldabilidad de los aceros al carbono
- Fenómeno de grietas en la soldadura
La Tabla 1.2 muestra el contenido de carbono equivalente para 4 muestras; la soldabilidad es buena si CE es inferior a 0,47 [51]. El acero AISI 1018 se caracteriza por un bajo contenido en carbono y se utiliza ampliamente en la industria en la fabricación de bases de máquinas [48]. Para evitar la formación de microestructuras duras se realiza un precalentamiento; Generalmente, este proceso se lleva a cabo a temperaturas en el rango de 150°C a 250°C para porcentajes de carbono entre 0,1% y 0,2%.
Vijay observó el cambio de microestructura en acero bajo en carbono con estructura de perlita en una matriz de ferrita, con una microestructura de granos austeníticos a una temperatura crítica de 850°C.

Variable Costo - Performance para el diseño
METODOLOGÍA
- Generación de modelo 3D del elevador telescópico
- Definición del Diseño del brazo hidráulico
- Metodología de Diseño
- Diseño Conceptual Ingenieril del brazo hidráulico
- Diseño Estructural del brazo telescópico
- Selección del rodamiento de giro
- Selección de componentes Hidráulicos
- Análisis de fuerzas y estabilidad usando Adams
34 dimensiones que aparecen en el manual del equipo como en la Figura 2.2 y el manual de componentes del modelo TL40140, donde se puede ver en detalle la geometría de los componentes, como se muestra en la Figura 2.3. Para aplicar el QFD, se construyó una casa como se muestra en la Figura 2.6, siendo el "Qué" y el "Cómo" las principales características de esta metodología. Las dimensiones del brazo están diseñadas en base al alcance máximo del escalador para trabajar en una mina cuyas dimensiones de sección están entre 4m x 4m y un máximo de 6m x 6m, como se muestra en la Figura 2.10, realidad que se da en minas subterráneas de pequeña y mediana minería.
41 Para calcular el espesor mínimo de placa y las longitudes óptimas para cada parte del ala se utilizó el procedimiento establecido por la norma, como se muestra en la figura 2.11. La Figura 2.12 muestra el diagrama de carga que se utilizó para seleccionar el rodamiento. A continuación, en la figura 2.13, se muestra un algoritmo para diseñar un sistema hidráulico.
Los circuitos hidráulicos se utilizan para representar esquemáticamente los componentes interconectados cuyo propósito es transformar la energía hidráulica en energía mecánica, como se muestra en la Figura 2.14. La Figura 2.15 muestra un diagrama de flujo para el análisis dinámico en el entorno de movimiento de Solidworks. Primero se importó el CAD generado en SolidWorks y se guardó el documento CAD en formato Parasolid como se muestra en la Figura 2.16, y luego se abrió desde Adams y tenía la geometría en el entorno de Adams.
Una vez obtenido el cuerpo 3D en el software Adams (como se muestra en la Figura 2.17), se comienza a determinar el material de cada sólido importado, en nuestro caso acero. Luego se establecieron las conexiones de los brazos mediante conectores de articulación, traslación y fijos, según el trabajo realizado por cada componente, como se muestra en la Figura 2.19; Posteriormente, los movimientos se definieron como: rotación y/o traslación, dependiendo del movimiento del componente individual.

RESULTADOS
Modelo 3D del elevador telescópico Bobcat TL40140
Diseño del brazo hidráulico definido
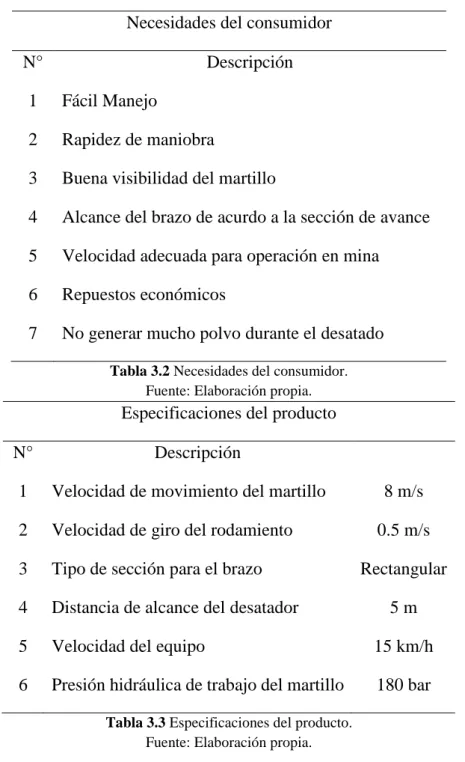
- Especificaciones de ingeniería para el brazo hidráulico
- Caja Negra
- Estructura de funciones
- Matriz Morfológica
- Generación de concepto
- Evaluación de concepto
51 para generar un diseño innovador de brazo hidráulico diseñado para la operación a realizar en minería subterránea. 1 Velocidad de movimiento del martillo 8 m/s 2 Velocidad de rotación del rodamiento 0.5 m/s 3 Tipo de sección para el brazo rectangular 4 Alcance del gatillo 5 m Como se muestra en la Figura 3.3, el recuadro negro define ASTM A- 572 acero (acero comercial en Perú) como principal material requerido para la obtención de las piezas del brazo estructural luego de realizar un proceso metal-mecánico.
La función principal del brazo hidráulico es colocar el martillo hidráulico en la zona inestable de la sección de alimentación para realizar la rotura de rocas. La matriz morfológica dio como resultado la obtención de conceptos de solución en función de la función que realiza el brazo y las necesidades del usuario. Debido a la variedad de componentes mecánicos alternativos y la operación del equipo durante el amarre, la Figura 3.6 y la Figura 3.7 muestran los dos conceptos generados para el brazo telescópico.
En el primer concepto, el brazo telescópico está situado en la parte central delantera del ascensor y tiene una distancia horizontal máxima de 5 m. El brazo consta de tres secciones, los pistones se ubican en el interior del brazo y realizan la función de mover las piezas, por lo que el martillo hidráulico tiene versatilidad de posiciones. Como se observa en la Tabla 3.6, el concepto de solución 2 tiene un valor técnico mayor que el primer concepto generado; también se obtiene de la comparación entre la solución propuesta y la solución técnica ideal.
A continuación, se muestra en la Figura 3.8 donde se presenta la comparación del aspecto técnico y económico de los conceptos 1 y 2. 61 Los resultados obtenidos, tanto económicos como técnicos, conducen al diseño del brazo hidráulico del concepto número 2; porque ofrece un mayor valor técnico y menos valor económico.
Diseño conceptual ingenieril
- Martillo hidráulico seleccionado
- Análisis de fuerzas sobre la estructura del brazo hidráulico
- Especificaciones del material para el brazo estructural
- Diagrama de cortante y momento flector
- Cálculo de las propiedades de sección
- Validación de la sección según recomendación SAE J1078
- Análisis por elementos finitos del brazo madre
- Selección del rodamiento de giro
- Selección de pistones Hidráulicos
- Selección de motor hidráulico
- Selección de bomba hidráulica
63 del brazo hidráulico, mientras que la Figura 3.13 muestra la imagen de simulación en el entorno Adams. 64 Las conexiones mencionadas en la Tabla 3.7 se detallan en la Figura 3.2, donde se ubica cada uno de los componentes analizados con el software Adams durante la operación del brazo hidráulico. A continuación se muestra la figura 3.12, donde se realiza la comparación entre las tallas obtenidas analíticamente en posición horizontal con el brazo completamente extendido; porque en esa posición se registra la mayor magnitud de fuerza luego de realizar la simulación con el software Adams.
La figura 3.13 es un modelo que pretende mostrar cómo se dobla el brazo cuando recibe la fuerza provocada por el impacto del martillo hidráulico al soltarlo, no muestra la magnitud sino el comportamiento del brazo. Esto se realizó utilizando el programa SolidWorks, que idealiza el brazo hidráulico como soporte. La Figura 3.16 muestra el análisis de la pata principal con refuerzo en la región crítica y la Figura 3.16 sin refuerzo. El cálculo realizado para cada paso se adjunta en el Anexo 4 y la Figura 3.18 muestra una alternativa para rotar el riel al tamaño; para la selección se calculó el momento equivalente: 12016N.m y la fuerza axil equivalente 25170N.
Por otro lado, a partir de la Simulación Adams se establece un momento de trabajo de 1940 N.m, con esto se calcula el momento máximo de 5820 N.m, como se muestra en la figura 3.19. 77 Además, para garantizar un tiempo de trabajo teniendo en cuenta el desgaste que sufrirá el eje sinfín, se debe calcular un valor límite Gw que relacione el par de funcionamiento con un número de horas de funcionamiento como se muestra en la Figura 3.21. A continuación, la Figura 3.22 muestra las características técnicas del rodamiento y la Figura 3.23 muestra el rodamiento final seleccionado.
La Figura 3.28 muestra las relaciones geométricas en función de las dimensiones del diámetro del cilindro, el del vástago, la carrera y cómo todas estas determinan un tamaño final del cilindro. En la Figura 3.30 y Figura 3.31 se muestran las características del motor Seleccionado de la marca Custom, modelo BM6.

Circuito hidráulico del brazo y martillo hidráulico
- Selección de mangueras
- Selección de válvulas
- Aproximación del costo de los componentes diseñados y seleccionados
Según la Figura 3.34, se puede definir el número de mangueras principales en el sistema hidráulico. Las mangueras se seleccionaron de los catálogos de Parker como se muestra en la Figura 3.35. Es necesario saber instalar la manguera, lo que limita el radio de curvatura, la presión y el caudal de la manguera. Las válvulas están limitadas por su capacidad de flujo y presión de trabajo, la figura 3.36 muestra la variación de flujo y presión para una válvula de distribución 4/3 seleccionada en la figura 3.34.
Cambiar la fuerza durante el movimiento estableció rápidamente la posición crítica donde las fuerzas son mayores; Con esto comparamos el cálculo analítico en esta posición con los obtenidos durante la simulación. El brazo hidráulico diseñado se ensambla en la posición trasera del equipo con el fin de darle al equipo mayor estabilidad y mejor distribución de la carga sobre el chasis; Por este motivo, en el segundo brazo telescópico se diseñó una articulación de cojinete giratorio; que es más pequeño. Josu Aguirrebeitia, “Cálculo teórico de la capacidad de carga estática general para el diseño y selección de rodamientos de rodillos cilíndricos de tres hileras”, Elseiver, vol.
Daidié, «3D Simplified Finite Element Analysis of Load and Contact Angle in a Deflected Ball Bearing», our issue of Mechanical Design, vol. Bustos, “Theoretical calculation of total static load-carrying capacity for the design and selection of three-row rolling element rolling bearings,” Elsevier, vol. Perez, "Hydraulic Systems Design Methodology," ResearchGate, vol. 69] SolidWorks, «Introduction to the Movie Analysis Application in SolidWorks Motion», Dassault Systèmes SolidWorks Corporation, Massachusetts, 2010.
LV, "Lateral stability analysis of telehandlers based on multibody dynamics", WSEAS TRANSACTIONS on APPLIED and THEORETICAL MECHANICS, vol. 85] Gurjot, "Stress Analysis of a Pick-n-Carry Mobile Crane Boom," International Journal of Science and Research, vol.

PROPIEDADES MECÁNICAS DEL ACERO A-572
FUERZAS EN CADA CONEXIÓN DEL BRAZO TELESCÓPICO
CÁLCULO ANALÍTICO BRAZO ESTRUCTURAL
CÁLCULO DEL RODAMIENTO DE GIRO
USO DE LA NORMA SAE J1078
CÁLCULO DE LOS PISTONES HIDRÁULICOS
PLANOS DE LA ESTRUCTURA DEL BRAZO HIDRÁULICO
PLANO MECÁNICO DEL RODAMIENTO DE GIRO
DESATADOR FINAL
![Figura 1.2 Ciclo de minado en minería subterránea Fuente: Disponibilidad del equipo desatador [5]](https://thumb-us.123doks.com/thumbv2/123dok_es/12312182.0/22.892.217.676.124.414/figura-ciclo-minado-minería-subterránea-fuente-disponibilidad-desatador.webp)





![Figura 1.11 Análisis cargas en la parte superior del brazo [63].](https://thumb-us.123doks.com/thumbv2/123dok_es/12312182.0/31.892.262.634.124.369/figura-análisis-cargas-parte-superior-brazo.webp)


