Confirmar el comportamiento de 3 estrategias de control: óptimo, robusto y modo deslizante para estabilizar el péndulo giratorio en posición vertical. El objetivo de este proyecto es diseñar las técnicas de control utilizadas en un prototipo de péndulo rotatorio invertido diseñado en base a prototipos ya desarrollados en tesis, investigaciones, publicaciones y teniendo en cuenta prototipos desarrollados por empresas desarrolladoras y creando sistemas de control de tiempo realistas.
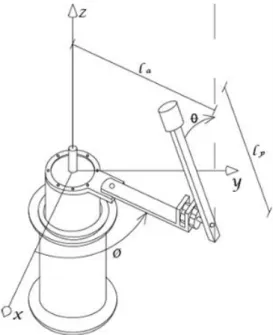
PÉNDULO DE FURUTA (PF)
- Modelo matemático
- Cinemática del sistema
- Análisis de energía
- Ecuaciones de movimiento
- Motor de corriente continua
- Diseño mecánico
- Dimensionamiento
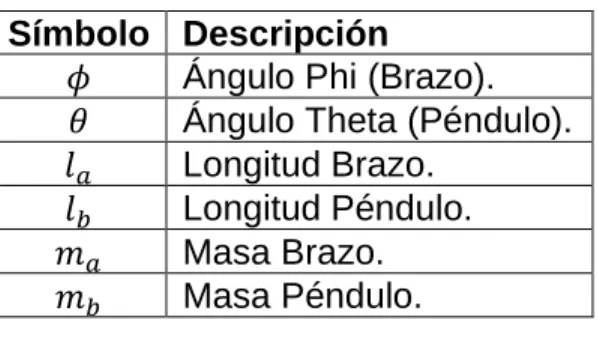
- Parámetros del modelo
- Diseño electrónico
- Sensores
- Caracterización de los sensores
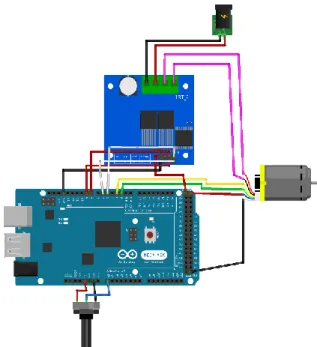
- Motor
- Sistema de adquisición de datos
- Conexiones
- Prototipo final
- Identificación del sistema
- Estimación de parámetros
La Figura 13 muestra los resultados obtenidos al comparar los datos experimentales con el modelo PF. Utilizando el modelo no lineal del sistema y los datos obtenidos en el proceso de identificación, en la pestaña Análisis de Simulink seleccione la opción Estimación de parámetros para el sistema.
DISEÑO DEL SISTEMA DE CONTROL
Representación en espacio de estados
- Puntos de equilibrio
- Linealización del modelo por espacio de estados
- Modelo de espacio de estados en tiempo discreto
Para proceder con la síntesis de control, el modelo de espacio de estados (41) debe linealizarse alrededor de los puntos de equilibrio. A partir de la expresión (46) y con las matrices de estado se determinan las funciones de transferencia que regulan el comportamiento de las variables de salida con relación a la entrada del sistema. El modelo lineal en espacio de estados de tiempo discreto se realizó definiendo un período de muestreo 𝑇, el cual se eligió analizando el diagrama de Bode del sistema a una atenuación de 40 db, donde la frecuencia más alta fue de 12 Hz, dando a este un período de muestreo de 𝑇 𝑠𝑒𝑔, sin embargo esto se fijó por conveniencia en 0.01 𝑠𝑒𝑔, ya que experimentalmente los controladores requirieron un período de muestreo menor para tener una respuesta óptima y rápida, dejando este valor para las estrategias de control.
De los polos de la matriz de estados se observa que el sistema es inestable ya que tiene polos fuera del círculo unitario.
Control por espacio de estados
Control LQG
- Control LQG del modelo del PF
- Diseño de control LQR
- Diseño filtro Kalman
- Simulación control LQG
Las siguientes matrices diagonales 𝑄 y 𝑅 se definen y explican en la Sección 2.3 para obtener una buena respuesta transitoria de los ángulos de rotación con el fin de minimizar la tensión generada en el actuador. Para el diseño se suponen las siguientes matrices de varianza, donde 𝑄𝑛 corresponde a la varianza del ruido en el actuador y 𝑅𝑛 a la varianza del ruido de los sensores explicados en la Sección 2.3. La Figura 17 muestra la respuesta transitoria de un sistema de péndulo con un controlador LQG que tiene un punto inicial de 20° con respecto a un punto de equilibrio de 0°.
La Figura 18 muestra la acción de control para la salida del sistema, donde se observa un voltaje pico de máximo 10 voltios, el cual es necesario para regular la posición del péndulo y que no es el voltaje máximo que el actuador puede entregar en la parte experimental. , no excede

Control Robusto
- Loop-Shaping
- Diseño de control robusto
- Simulación de control robusto
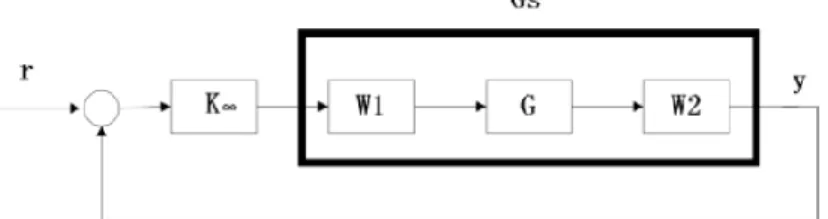
Una vez que se obtiene el controlador 𝐾 para el modelo 𝐺𝑠, el controlador 𝐾 se puede expresar en la siguiente forma (66), como se muestra en la Figura 21. En el caso de un diseño de controlador robusto, se establece una función de transferencia H∞ elegida apropiadamente para el sistema , y se utiliza la función loopsyn de la herramienta Matlab. Para el diseño de controladores robustos se requiere una función o filtro 𝐺𝑑 que penalice el comportamiento de la planta con un controlador de lazo abierto en frecuencia.
La respuesta de la planta con el controlador con las especificaciones mencionadas se muestra en la figura 23.
Control por modos deslizantes (SMC)
- Diseño control modos deslizantes
- Simulación control modos deslizantes
La idea del control del modo deslizante se puede ver en la Figura 27.b [20], donde se utiliza una superficie deslizante para representar la dinámica deseada del sistema, donde el estado actual del sistema se deslizará hacia su estado. deseado (punto de ajuste). La Figura 28 [22] muestra la forma de cada una de las funciones mencionadas y su aproximación gráfica con la función de signo aplicada [22]. La expresión de saturación se utiliza para la simulación e implementación del controlador, ya que la variación del parámetro 𝛿 permite generar suavidad en la operación de control y se asemeja a la señal del comportamiento de inicio de sesión de la superficie.
Se puede observar en la Figura 33 que el controlador, ahora diseñado con una implementación de saturación, logra regular ambos ángulos del sistema cuando opera en su punto de equilibrio.

Método Swing-Up
- Simulación método Swing-Up
La Figura 38 muestra un diagrama de bloques de la integración entre el controlador Swing-Up y el controlador LQG. La Figura 39 muestra las respuestas transitorias de los ángulos expuestos al controlador Swing-Up-LQG, se observa un giro hacia arriba de 180°. La Figura 41 muestra un diagrama de bloques de la integración entre el controlador Swing-Up y el controlador de modo deslizante.
Las Figuras 42 y 43 muestran las respuestas transitorias de los ángulos regulados y la respuesta de la acción del controlador generada respectivamente para levantar el péndulo y regularlo a su posición de equilibrio.

Comparación estrategias de control
En la Figura 45 se muestra la respuesta de los controladores con una apertura máxima de 35° respecto al punto de equilibrio, se puede observar que los controladores logran regular la posición del péndulo, pero a la vez generan una acción de control muy fuerte. que el actuador en una posible implementación no podrá regular la posición ya que su área de trabajo es mucho menor que la expuesta por la simulación. La Figura 46 muestra la simulación de los controladores; Para la simulación se utilizó 𝑘 = 4200 y se puede observar que. Finalmente se realiza una simulación buscando el rango límite en grados en el que el controlador Swing-Up tiene capacidad para ingresar a la zona de operación de equilibrio, que en este caso extiende el rango de -45° a 45° y así sucesivamente. la posición del péndulo en su punto de equilibrio con los controladores lqg y los modos deslizantes, en la simulación se utiliza el mismo 𝑘 de 4100 para ambas simulaciones.
En la Figura 48, la simulación se realiza cambiando el controlador a 45°, se puede observar que el controlador logra regular la posición de ambos ángulos, pero la acción de control que se observa en la Figura 49 es muy fuerte al ejecutar la simulación. controles de conmutación y, por lo tanto, exceder los límites de activación del actuador incorporado.

VALIDACIÓN DE CONTROLADORES
Interfaz gráfica
La sección 3 de la interfaz monitorea las respuestas transitorias de las variables del péndulo en forma numérica y gráfica, enviadas desde la máscara. Finalmente cuenta con un modelo 3D donde configura y simula el funcionamiento del prototipo de péndulo con implementación en tiempo real. Matlab cuenta con una Toolbox que permite diseñar modelos 3D que se pueden colocar y mover en Simulink dependiendo de las señales que llegan, esta herramienta se llama V-Realm, se explica cada uno de los bloques en la sección 3 y la construcción del modelo virtual. en el Apéndice 4.

Implementación control LQG
- Punto de equilibrio
- Swing-Up
- Punto de equilibrio, perturbación
- Swing-Up, perturbación
La figura 55 muestra la acción generada por el actuador para regular el péndulo; muestra una acción suave característica del uso del filtro Kalman. La implementación de la integración del controlador Swing-Up con el LQG diseñado en el apartado 2.6 se muestra en la Figura 56, se observa la respuesta transitoria de las variables, el péndulo sale de su zona de reposo a 180°, como en En el punto de equilibrio, el brazo oscila entre una serie de ángulos de -100° a 100° y regula la posición del péndulo, que en este caso permanece cerca de su zona de estabilidad. La Figura 57 muestra la acción generada por el motor para continuar llevando el PF desde su posición de reposo a 180° hasta una región cercana a su punto de equilibrio.
La Figura 60 muestra el levantamiento del péndulo y luego se realizan pequeñas perturbaciones en la zona de equilibrio para verificar el comportamiento del controlador.

Implementación control por modos deslizantes
- Punto de equilibrio
- Swing-Up
- Punto de equilibrio, perturbación
- Swing-Up, perturbación
La Figura 67 muestra la acción generada por el controlador a través de modos deslizantes para llevar el PF desde 180° a su zona de equilibrio. Una parte continua de las acciones de control generadas por el controlador del ascensor se observa y una vez que alcanza su equilibrio, toma un comportamiento discontinuo debido a la dinámica de control del modo deslizante. La Figura 69 muestra la acción de control generada ante perturbaciones. Se puede observar que el voltaje de la acción de control se mantiene constante ante perturbaciones, debido a la dinámica de respuesta del controlador. Sin embargo, logra mantener el péndulo en su posición.posición de equilibrio. En la prueba realizada, la perturbación logró desestabilizar el péndulo y el controlador del ascensor devolvió el péndulo a su zona de estabilización.
La figura 71 muestra la acción operativa, se genera una parte continua por parte del controlador de elevación y se observa un comportamiento discontinuo debido a la dinámica del deslizador en la zona de equilibrio.

Implementación control robusto
- Punto de equilibrio
- Punto de equilibrio, perturbación
En la Figura 73, la acción de control robusta presenta un comportamiento similar a lqg en que utiliza valores pequeños para regular el sistema. Se realiza la implementación de la unidad de control robusta, la misma es sometida a pequeñas perturbaciones donde se afecta la variación del ángulo, la Figura 74 muestra el comportamiento de los ángulos en relación a estas fuerzas, se observa que el ángulo del brazo se mantiene desregulado en una zona de trabajo continúa girando, aunque logra regular la posición del péndulo, el péndulo mantiene su estabilidad ante las perturbaciones. La Figura 75 muestra la acción de control robusta que se genera; se observa que ante perturbaciones realiza una acción fuerte y rápida para mantener la regulación del sistema.

Comparación de controladores
Durante el desarrollo del proyecto, los conocimientos adquiridos en el diseño de sistemas de control se utilizaron principalmente para la creación, puesta a punto e implementación de los controladores en el sistema de péndulo furuta. En la implementación de los controladores, el controlador con mejores resultados en cuanto a generar acciones de control es el control LQG, en comparación con los controladores robustos y modos deslizantes, además de un buen comportamiento en cuanto a perturbaciones aplicadas al sistema. La implementación de la función de saturación se realizó para el controlador mediante modos deslizantes para reducir las altas frecuencias de acciones, pero no hubo gran diferencia respecto al controlador sin saturación, presentaron el mismo comportamiento de acciones de control.
Implementación de una estrategia de control para la dosificación automática de cisco en el quemador de una. Para conectar el eje al brazo, se realiza un acoplamiento que conecta el eje del sistema al brazo del péndulo. La Figura 100 muestra el acondicionamiento de la señal del potenciómetro para obtener el valor del ángulo del péndulo y su velocidad.