Esta tesis es un proyecto de investigación que tiene como objetivo implementar un sistema mecatrónico para reconocimiento y exploración de terrenos basado en robótica móvil, visión artificial y hardware Kinect, para proporcionar un sistema que sea fácil de usar y comprender para el usuario. . En la situación actual, existen diversas herramientas que se utilizan en las labores de rescate, que facilitan el desempeño de la tarea y el acceso a zonas de alto riesgo. Los elementos mencionados anteriormente facilitan las labores de rescate, pero al mismo tiempo la mayoría de ellos cuentan con un sistema operativo poco interactivo y con un alto grado de dificultad.
Este artículo propone un sistema de control que utiliza hardware Kinect para facilitar y comprender mejor la interacción usuario-máquina.
PLANTEAMIENTO DEL PROBLEMA
- ANTECEDENTES
- FORMULACIÓN DEL PROBLEMA
- JUSTIFICACIÓN
- IMPACTO ESPERADO
Una de estas estrategias para reducir el riesgo de los rescatistas incluye el uso de última tecnología y sistemas electromecánicos, representados en robots móviles dedicados a labores de inspección, exploración y rescate en entornos de difícil operación como, por ejemplo, hospitales. : tierra, agua y aire Por su movilidad, eficiencia, su capacidad para manejar diferentes herramientas y su alto rendimiento en múltiples terrenos, los robots móviles destacan en las labores de rescate. Los robots móviles promueven que la ejecución sea más exacta, precisa y menos riesgosa para quien realiza las labores de rescate o aquellas tareas que investigan un sitio previo.
El impacto directo es la introducción de un sistema fácil de usar para los rescatistas que no tienen el conocimiento o las habilidades para controlar robots terrestres móviles, flexibilizando así el uso de estas herramientas durante el reconocimiento del terreno.
OBJETIVOS
OBJETIVO GENERAL
OBJETIVOS ESPECÍFICOS
MARCOS DE REFERENCIA
MARCO TEÓRICO
Según Microsoft, "C# es un lenguaje de programación diseñado para crear una variedad de aplicaciones que se ejecutan en .NET Framework. En las aplicaciones .NET Framework, CLR proporciona estos servicios en nombre de la aplicación. Con raras excepciones, las aplicaciones desarrolladas con un versión particular de .NET Framework, ejecútela sin modificaciones en una versión posterior.
Esto significa que también pueden coexistir varias versiones de aplicaciones y que una aplicación puede ejecutarse en la versión de .NET Framework con la que fue creada.
METODOLOGÍA DE LA INVESTIGACIÓN
FUENTES Y TÉCNICAS DE RECOLECCIÓN DE INFORMACIÓN
La principal fuente de información utilizada fue la base de datos ProQuest, la cual nos proporciona múltiples revistas científicas y publicaciones académicas, de igual manera se utilizaron los libros: Manipuladores y Robots Móviles de MARCOMBO Publishers y la Biblia C# de Anaya Multimedia Publishers. casa. La primera técnica de recolección de datos es a través de la observación, ya que permite acumular y sistematizar información sobre el problema que motiva la investigación. Al aplicar esta técnica, el investigador registra lo observado, mediante el análisis de datos en tiempo real con el sistema piloto que se desarrolla.
La segunda técnica de recolección de datos es a través de una encuesta que permite conocer en la población estudiada qué motiva un consumo tan elevado de alcohol y otras variables a tener en cuenta.
PRESUPUESTO
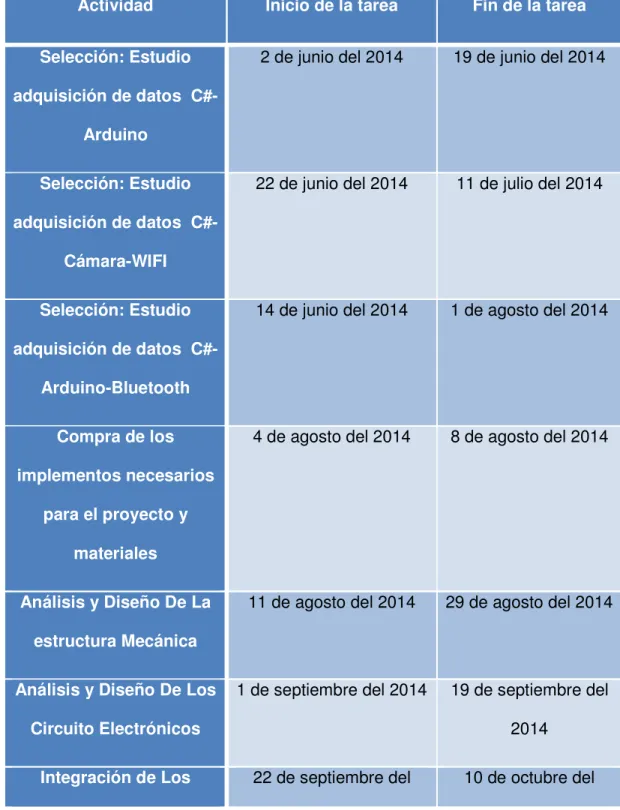
CRONOGRAMA
PROPUESTA INGENIERIL
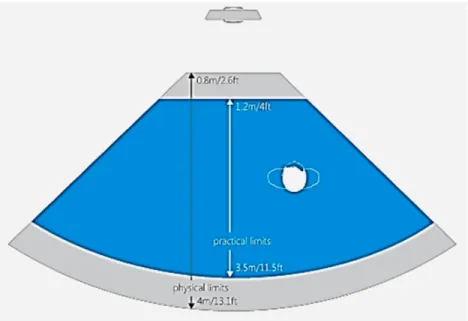
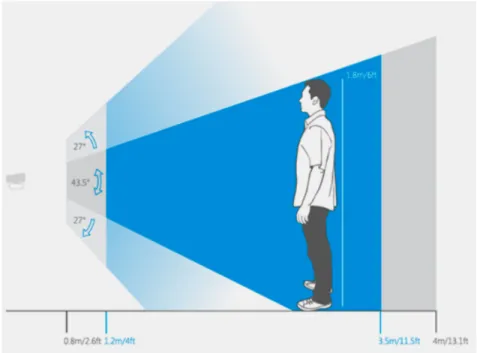
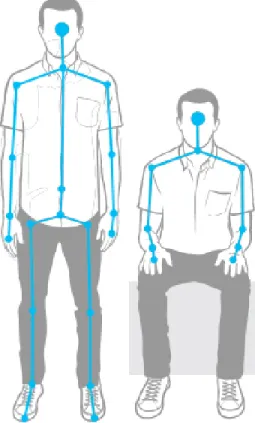
Entre las herramientas que nos proporciona Microsoft para procesar la información capturada por el Kinect se encuentra el monitoreo del esqueleto humano, esta herramienta crea una matriz que contiene las coordenadas de cada miembro del cuerpo humano, tomando como referencia el propio Kinect, para las mediciones de coordenadas ( ver Figura 10). Para el primer uso de esta herramienta, se explicará brevemente qué partes del cuerpo humano utiliza esta herramienta como referencia y cuál es el alcance de la cámara de profundidad. Una vez normalizada la imagen, el algoritmo SDK encuentra el centro de gravedad del cuerpo en la imagen, la.
En la Figura 11, Gesto 1, se encontró que los valores de las coordenadas del eje Y de la muñeca, el codo y el hombro de la mano derecha tienen el mismo valor. En la Figura 12, Gesto 2, se comprobó que los valores de las coordenadas de la muñeca, codo y hombro de la mano izquierda tienen el mismo valor con respecto al eje Y, en cambio, los valores de la muñeca, el codo y el hombro derecho tienen en consecuencia un valor diferente para identificar este gesto. En la Figura 13, Gesto 3, se encontró que los valores de coordenadas de la muñeca, codo y hombro de la mano derecha e izquierda con respecto al eje Y tienen el mismo valor, en otras palabras, el software Si reconoce esto gesto, el usuario debe alinear las manos derecha e izquierda horizontalmente.
En la Figura 14, gesto 4, se expresó que los valores de las coordenadas de la muñeca y el codo son menores que el valor de las coordenadas de los hombros en los brazos derecho e izquierdo en relación al eje Y, por lo que para su identificación. de este gesto el usuario debe mantener los brazos quietos. Una vez conectada la red, el robot móvil generará una retransmisión mostrando lo que percibe el robot explorador, la calidad de esta retransmisión dependerá de la cámara y de la configuración proporcionada por el usuario. El tamaño de la estructura prototipo es de 15 cm de largo y 22 cm de ancho.
En la Figura 12 se puede ver el circuito diseñado en Proteus para la regulación de voltaje. La reducción de velocidad de la caja es de 58 a 1 (58:1), lo que crea suficiente fuerza para mover el robot. Como cámara web se utilizó una cámara web, un teléfono inteligente moto x de Motorola Mobility LL.
Para la transmisión de la imagen tomada por la cámara del smartphone se utilizó una aplicación llamada IP Webcam almacenada en Google Play, que nos permite visualizar nuestra cámara desde una dirección IP.

RESULTADOS
ANÁLISIS DEL FLUJO DE DATOS REALIZADO POR LA WEBCAM DEL ROBOT MÓVIL. Porcentaje de uso de la red informática para una calidad de transmisión del 50 %. Los datos de las 2 figuras mostradas antes fueron tomados por el monitor de red de Windows.
Para las dos calidades de streaming utilizadas para muestrear los datos, se revela que la calidad de video mínima de 480p utiliza el porcentaje más bajo de la red informática total, por otro lado, a medida que la calidad del video aumenta hasta llegar a la calidad máxima, se observó que el porcentaje de la red utilizada también aumentó, lo que significa que el aumento en la calidad del video y la transmisión es directamente proporcional al porcentaje de uso de la red informática. Para el análisis del robot móvil se dividirá en 2 secciones, donde se podrá ver un análisis detallado del robot móvil en cuanto a los movimientos ingresados al Kinect y los campos de exploración. El análisis de los movimientos introducidos tiene como objetivo calcular el porcentaje de error de los movimientos detectados por el Kinect en relación al movimiento del robot móvil.
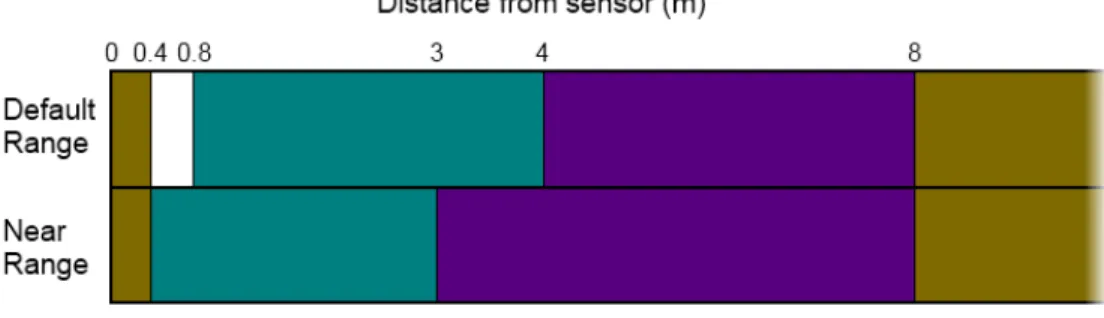
Para ilustrar lo expresado anteriormente se resaltará una imagen donde se podrá ver cuál es el error para las 3 distancias encontradas. De la imagen anterior se puede observar que el rango de funcionamiento ideal, para que el robot no se vea afectado por el error en el modo de pie o el kinect predeterminado, es de 1,4 metros a 2,2 metros. El rango de funcionamiento ideal del Kinect en modo sentado, que no afecta al funcionamiento del robot, es de 0,6 M a 1,7 M.
Para el análisis del funcionamiento del robot móvil en el área de exploración se tuvo en cuenta 6 tipos de terreno, donde se midió el tiempo que tarda en recorrer una distancia de 2 metros por 3 pendientes, y se determinó si había presencia de atascos en la ruta. De los datos presentados anteriormente se puede inferir que a una inclinación de 0° el robot no presentó bloqueo en su trayectoria, además, el terreno donde mostró una mayor eficiencia es el concreto.

CONCLUSIÓN
La interfaz gráfica puede consumir el 60% de la CPU de una computadora con un procesador de 5 núcleos y una velocidad de procesamiento de 2,5 GHz, ralentizando temporalmente otras funciones de la computadora, sin llegar a afectar el funcionamiento del sistema. La retransmisión generada por la cámara web del robot móvil se ve afectada principalmente por la calidad de la cámara y la calidad de la reproducción, que aumentan el uso de la red informática a medida que aumenta su calidad, generando un retraso en la transmisión al recibir el vídeo. información. El robot oruga móvil diseñado se ve afectado por la pendiente, generando bloqueos en el robot a medida que aumenta la pendiente, cabe agregar que el terreno donde presentó mayor desempeño fue en concreto.
Con base en los resultados obtenidos en este trabajo de grado, el sistema de transmisión se puede mejorar en el futuro implementando una transmisión de oruga con rodillos dobles más compleja para solucionar las fallas encontradas en el sistema. En conjunto, la interfaz gráfica se puede mejorar optimizando el software para que utilice menos recursos. Imagen tomada vía Internet: http://msdn.microsoft.com/en-us/library/hh973078.aspx [28] Microsoft Developer Network.
Las figuras 21 y 22 muestran el estado actual del robot móvil diseñado por la investigación. Para el análisis se utilizó terreno seco y terreno húmedo para simular el fenómeno atmosférico de la lluvia. Las siguientes imágenes describen el terreno utilizado para la recolección de datos presentados en los resultados (ver capítulo 8).

![Figura 3. Partes del Kinect. [22]](https://thumb-us.123doks.com/thumbv2/123dok_es/12316746.0/19.918.253.745.131.528/figura-partes-del-kinect.webp)