DETERMINACIÓN EXPERIMENTAL DE PARÁMETROS MOTORES A UTILIZAR EN UN SISTEMA LOCOMOTORA DE ESFERA RODANTE. Doctor Edgar Barrios, director del proyecto, por su ejemplar formación en conocimiento, prudencia y formación integral. A los docentes de la Especialización por su aporte técnico y humano a la formación de este proyecto que inició con el primer grupo de la Especialización.
TÍTULO: DETERMINACIÓN EXPERIMENTAL DE LOS PARÁMETROS DEL MOTOR UTILIZADO EN EL SISTEMA DE LOCOMOCIÓN DE UNA ESFERA RODANTE. El proyecto consiste en la adquisición experimental de los parámetros de un motor de corriente continua, los cuales son: La resistencia del inducido, constante de inductancia del inducido y la constante de tiempo eléctrica, determinación del momento de inercia, adquisición de la constante de voltaje, determinación de la constante de torque. , determinación de la constante de tiempo mecánica, que obtiene la corriente de arranque. Con los valores anteriores de las constantes se obtiene el modelo matemático del motor eléctrico de corriente continua que será utilizado en el diseño del sistema de movimiento de esfera rodante.
Una esfera rodante es un robot de tipo esférico para este tema, hay estudios muy recientes y todo se basa en la facilidad con la que se puede mover una esfera.
INTRODUCCIÓN
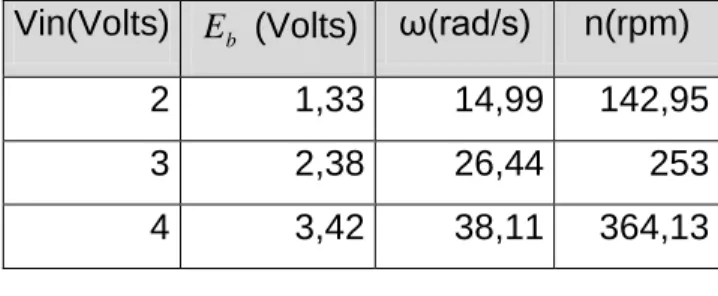
Obtención de la corriente de arranque y el par de fricción en servomotores CC. El tipo de motor que se utilizará será de corriente continua, la representación ideal del motor de corriente continua de imán permanente se puede ver en la figura 1. En la última ecuación se observa que cuando el valor de Ia aumenta, el valor de Eb disminuye .
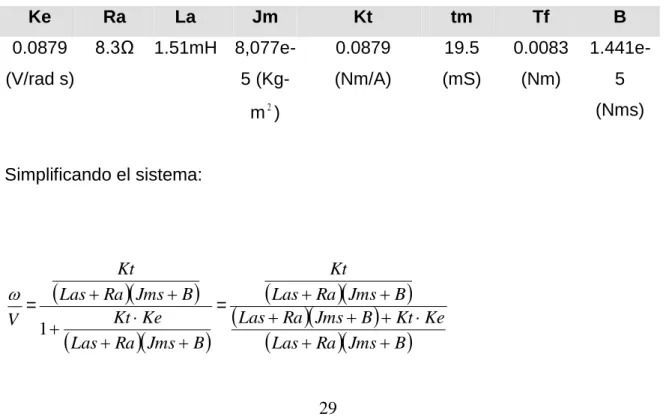
Para proceder al análisis o diseño del sistema de control del motor DC de imanes permanentes es necesario conocer la función de transferencia, lo que se conoce como modelado matemático de la instalación.

OBJETIVOS
OBJETIVO GENERAL
El primer método: este se obtiene midiendo la resistencia con un multímetro en los devanados de la armadura del motor (está en los cables rojo y negro) Para el método experimental dos: Se establece un valor mínimo de voltaje para la alimentación del motor DC, de tal que la corriente del inducido se mide antes de iniciar el movimiento del eje del motor, con este valor y mediante un amperímetro podemos obtener la corriente y aplicando la ley de Ohm se calcula la resistencia del inducido (Ra). Con un conocimiento previo de la resistencia del inducido Ra y de la inductancia del inducido (La), se puede proceder a calcular la constante de tiempo eléctrica (te). La constante de par Kt y la constante de fuerza electromotriz trasera Ke son dos parámetros separados; para un motor determinado, sus valores están estrechamente relacionados.
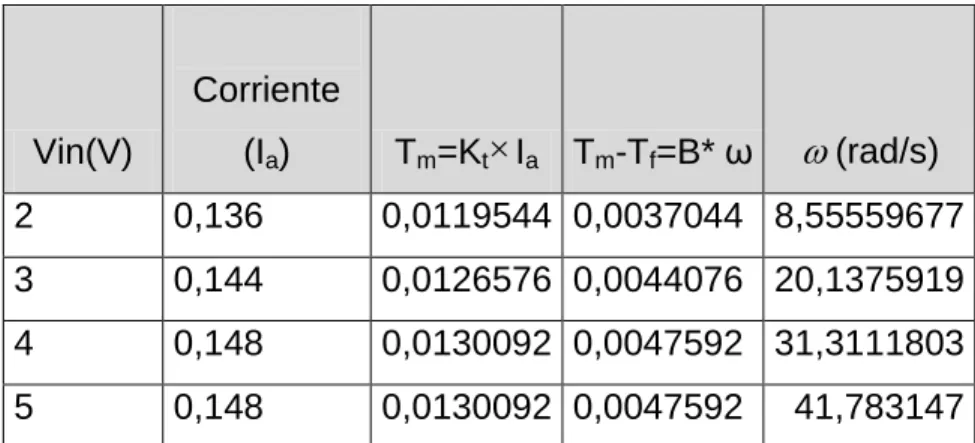
Aplicando la técnica paramétrica dimensional de (ecuación 8), se encuentra el valor de la constante de torque. Los ajustes necesarios se realizan en el osciloscopio para capturar, congelar y mostrar la respuesta de voltaje transitorio del motor. Se obtiene la gráfica del par mecánico versus velocidad, mediante el método de regresión lineal se determina la ecuación de la recta, la pendiente de esta gráfica dará el valor de la constante de fricción B.
La precisión para determinar la fricción de culombio depende de la precisión del tacómetro y amperímetro utilizados.
OBJETIVOS ESPECIFÍCOS
MARCO TEÓRICO
DETERMINACIÓN DE LS PARÁMETROS MOTOR DE
- Determinación de la Constante contraelectromotríz (k,)
- Determinación de la Resistencia de Armadura (ra)
- Determinación de la Resistencia de Armadura (la)
- Determinación de la Constante d Torque (ka)
- Determinación de la Constante de Tiempo Mecánica ™
- Determinación del Momento de Inercia (Jm)
- Obtención del Torque de Fricción y la Corriente de Arranque
- Determinación de la Constante de Fricción de Coulomb (B)
REVISIÓN DEL ESTADO DEL ARTE SOBRE VEHÍCULOS
El estudio reciente de los sistemas no holonómicos ha sido extenso, lo que básicamente significa que las ecuaciones derivadas de su análisis dinámico no son integrables; Estas ecuaciones se basan en la conservación del momento de inercia. En la Figura 1 se pueden ver los vehículos propuestos por diferentes autores. El modelo de péndulo es uno de los más difíciles de controlar debido a su naturaleza física y dinámica, propuesto originalmente para movimiento unidireccional. Una esfera unidireccional permitiría el movimiento por sí sola. Sin embargo, gracias al interior del vehículo, las limitaciones vienen dadas por el campo de acción del movimiento. Ambas propuestas anteriores se complementarían con un diseño con un vehículo en su interior con movimiento omnidireccional, que también se reflejaría en el movimiento de espera.
En el año 2000, estos autores solicitaron la patente para el vehículo esférico, que les fue concedida en julio de 2002 con el número 6414457, postulándose como miembros de la Universidad de Delaware [6]. Javadi y Mojabi [3] propusieron en 2002 un sistema esférico como vehículo propuesto y modelado matemáticamente como alternativa al movimiento omnidireccional, que requería sistemas de accionamiento mecánicos internos que eran difíciles de implementar. En 2006, Seeman [4] presentó la implementación, que no incluía modelización matemática, de un sistema de seguridad basado en un vehículo esférico en cuyo interior se encontraban cámaras de vigilancia.
Se aprovechan las ventajas de este tipo de vehículos para exponerlos a entornos hostiles. En 2008, Jia [5] publicó una gran cantidad de artículos científicos que proponían modelos matemáticos que gobiernan el comportamiento dinámico del vehículo esférico. Estos artículos publicados fueron el resultado de un trabajo desarrollado en la Universidad de Correos y Telecomunicaciones de Beijing de China.
El trabajo desarrollado fue validado con software de simulación e implementado en un pequeño prototipo de dimensiones similares al desarrollado en este trabajo a escala. Las siguientes ecuaciones propuestas por Jia [5] describen la cinemática tomando siempre el centro de masa en C como se ilustra en la figura anterior, R el radio de la esfera, P el punto de contacto S seno y C coseno. Posteriormente, los mismos autores publicaron artículos haciendo referencia al control implementado en el prototipo inicial, que garantizaba una cilindrada adecuada, ya que los motores necesitarán un control permanente.
Se han mostrado aplicaciones que garantizan el movimiento de este tipo de vehículos sobre la nieve con prestaciones suficientes, confirmando la versatilidad de este mecanismo. La Agencia Aeronáutica Norteamericana NASA, junto con algunos centros de investigación, también están apostando por este tipo de vehículos esféricos, que aprovechan su bajo consumo energético para su movimiento, pero de momento no tienen un producto final que muestre resultados tangibles. de sus esfuerzos, sólo los avances que publican periódicamente en sus sitios web como difusión de sus proyectos.

SISTEMA DEL VEHÍCULO ESFÉRICO DESARROLLADO…. 37
Circuito Electrónico
La tarjeta de control dispone de un microcontrolador dsPIC30F4013 programado con el lenguaje de programación Assembler de Microchip. La tarjeta tiene la posibilidad de gestión adicional con radiocontrol, es decir, el uso de módulos estándar de los cuales dos de sus canales se utilizan para controlar sus dos motores. El manejo del servomotor se realiza mediante control basado en el ancho de pulso que oscila entre una tonelada y 0,6 msegundos.
Los otros ángulos manejados son de hasta 40 grados para giros bruscos a la derecha y -40 grados para giros bruscos a la izquierda.
Estrategia de Control
El control utilizado para el arranque suave fue mediante modulación de ancho de pulso desde un valor pequeño hasta uno final que determinaría la velocidad de crucero del vehículo. El control del ángulo del cigüeñal fue creado para variaciones suaves, ya que aceptaba directamente el avance o retroceso del sistema al realizar cambios bruscos de rotación. Se comprobó que los datos encontrados experimentalmente permitieron obtener un modelo bastante preciso del motor, ya que la simulación muestra una respuesta del sistema bastante cercana a la respuesta de la planta.
Uno de los usos importantes del lugar radicular es que permite identificar la dinámica de la planta, ya que el polo más cercano al origen indica el tiempo mecánico, que es predominante en el sistema. Por otro lado, el polo más alejado del origen representa la constante de tiempo eléctrica. Se realizó un panorama del estado del arte en el campo de los vehículos esféricos a partir de artículos científicos que sirvieron de sustento a la propuesta presentada y convertida en prototipo.
El diseño de la estructura 3D permitió obtener fácilmente un prototipo físico realizándolo en el taller utilizando acrílico como material. Se logró implementar un vehículo esférico con control remoto automático que aprovecha las ventajas de la estructura que consiste en utilizar un bajo torque para su movilidad gracias al único punto de contacto y que esta inercia se puede superar fácilmente cambiando el ángulo angular. posición desde el centro de su masa. Se realizaron varias pruebas en superficies, garantizando el progreso también en superficies con diferentes pendientes, abriendo un camino para la medición de pares de la estructura sometida a ambientes de simulación, con la facilidad de validar estas simulaciones en el prototipo.
Este vehículo permitirá probar estrategias de control que garanticen un movimiento mucho más suave, ya que hasta el momento sólo se ha implementado un arranque suave para alcanzar la velocidad de crucero, y presenta dificultades para realizar giros si se desea que estos se realicen a diferentes velocidades. La placa electrónica implementada no tomó en cuenta que era posible cambiar el programa mediante terminales de comunicación, lo que inicialmente dificultó este proceso, y tomó un tiempo valioso para desmontar la estructura y retirar el integrado, lo cual es de fácil solución, prever por dejando algunos terminales de programación a disposición de los usuarios. Esta área de movimiento con vehículos esféricos podría integrarse para diseñar estructuras mecánicas robustas haciendo proyectos conjuntos con la Facultad de Mecánica.
Este campo de investigación requiere de una simulación dinámica de la estructura que permita confirmar el par utilizado por el motor de tracción y su rendimiento, por lo que en el trabajo de grado desarrollado en paralelo al presente se quiere desarrollar parte de estas necesidades.