Orbital stability of standing waves for the nonlinear Schr¨ odinger equation with attractive delta potential and double power repulsive nonlinearity
Ram´on G. Plaza
Institute of Applied Mathematics (IIMAS)
Universidad Nacional Aut´onoma de M´exico (UNAM) July 3, 2019
ZumbrunFest - Stability of Nonlinear Waves: Analysis and Computation. Institut Henri Poincar´e.
Joint work with: Jaime Angulo Pava(Univ. Sao Paulo) and C´esar Hern´andez Melo(Univ. Maring´a)
Sponsors:
• DGAPA-UNAM, program PAPIIT, grant no. IN-100318.
• FAPESP, S˜ao Paulo, processo 12543-4.
Table of contents
1. Introduction
2. Local and global well posedness for the NLS 3. Existence of standing waves
4. Orbital stability
2
Introduction
Nonlinear Schr¨ odinger equation (NLS)
NLS equation withattractive delta potentialandrepulsive double power nonlinearity:
iut+uxx+Zδ(x)u+λ1u|u|p−1+λ2u|u|2p−2= 0
• Unknown: u=u(x,t)∈C, forx,t∈R.
• Parameters: λ1≤0,λ2<0,Z>0,p>1.
• δ :H1(R)→C,hδ,gi=g(0) (Dirac deltacentered atx= 0.)
• Linear interaction: ∂x2+Zδ(x).
• Nonlinear term: λ1u|u|p−1+λ2u|u|2p−2.
• i2=−1.
3
Physical applications
• We recall that the general NLS model
iut+uxx+V(x)u+f(|u|2)u= 0,
represents a trapping (wave-guiding) structure for light beams, induced by an inhomogeneity of the local refractive index.
• The delta-function termV(x) =Zδ(x) represents anarrow trap which is able to capture broad solitonic beams.
• It models a spatially localized point defectof the medium in which the soliton travels (localized attractive “impurity”).
• The non linear termf(x) =λ1x(p−1)/2+λ2xp−1is well known in optical media.
Standing waves
Standing wavesare solutions to the NLS model of the form u(x,t) =e−iωtφ(x),
whereω∈Rand theprofile of the waveφ:R→Rsatisfies (
φ00+Zδ(x)φ+ω φ+f(|φ|2)φ= 0,
φ∈H1(R), (ODE)
wheref =f(·) is an arbitrary function satisfying f ∈C1((0,+∞);R) with f(0) = 0,
f0(x)<0 for allx>0. (Hf)
Example: if 1<p<∞,λ1≤0 andλ2<0 then f(x) =λ1x(p−1)/2+λ2xp−1 satisfies (Hf).
5
Standing waves
Standing wavesare solutions to the NLS model of the form u(x,t) =e−iωtφ(x),
whereω∈Rand theprofile of the waveφ:R→Rsatisfies (
φ00+Zδ(x)φ+ω φ+f(|φ|2)φ= 0,
φ∈H1(R), (ODE)
wheref =f(·) is an arbitrary function satisfying f ∈C1((0,+∞);R) with f(0) = 0,
f0(x)<0 for allx>0. (Hf) Example: if 1<p<∞,λ1≤0 andλ2<0 then
f(x) =λ1x(p−1)/2+λ2xp−1 satisfies (Hf).
δ -interaction quantum operator
Theδ-interaction quantum operatorAZ is defined as AZ:=−∂x2−Zδ(x) (AZf(x) =−f00(x), x6= 0,
D(AZ) ={f ∈H1(R)∩H2(R\{0}) :f0(0+)−f0(0−) =−Zf(0)},
6
Orbital stability
Definition (orbital stability)
The standing wavee−iωtφω is orbitally stableby the flow of the NLS equation nH1(R), if for anyε>0 there existsδ>0 such that if ku0−φωkH1<δ then
inf
θ∈R
ku(t)−eiθφωkH1<ε, for all t∈R,
whereu(t) denotes the solution to the NLS equation with initial data u(0) =u0∈H1(R). Otherwise,e−iωtφω is said to beorbitally unstablein H1(R).
Main theorem
Theorem (Angulo Pava, Hernandez Melo, P (2019))
Let1<p<∞,λ1≤0,λ2<0and Z>0 in the NLS equation. Then for all values ofω<0 satisfying
− pλ12 (p+ 1)2λ2
<−ω<Z2 4
the family of standing wave solutions, u(x,t) =e−iωtφω, withφω given by
φω= α
−ω +
√v
−ωsinh
(p−1)√
−ω
|x|+R1−1 Z
2√
−ω
−p−11
where v=ω β−α2, areorbitally stablesolutions in H1(R)under the flow of the NLS equation.
8
Previous results
• CaseZ = 0: Ohta (1995), double power nonlinearity;Maeda (2008), multiple power nonlinearity.
• Repulsive δ potential: Fukuizumi, Jeanjean (2008)
• Attractiveδ potential: Fukuizumi et al. (2008)
• Kaminaga, Ohta (2009): attractiveδ with repulsive single power nonlinearity.
Multibody interactions ofsame sign(repulsive, double power
nonlinearity) appear in the study ofBose-Einstein condensates: Brazhnyi, Konotop (2004); Belobo Belobo et al. (2014); Kamchatnov, Salerno (2009); Kamchatnov, Korneev (2010) (dark solitons).
Concentration-compactness method: Cazenave, Lions (1982)
• The Cauchy problem: The initial value problem associated to the NLS equation isglobally well-posedinH1(R) for 1<p<+∞, λ1≤0,λ2<0 andZ>0.
• Existence of profile solution φω: for parameter valuesp,λ1,λ2,Z andω satisfying the assumptions there exists a profile solutionφω of the elliptic equation (ODE) (explicit construction).
• The stationary problem: The setAω ofnon-trivial solutionsof the equation for the profiles inH1(R) will be characterized, via
uniqueness, by
Aω={v:Gω0(v) = 0,v6= 0}={eiθφω:θ∈R}, where
Gω(v) =E(v)−ω 2kvk2L2, E(v) :=1
2kvxk2L2−Z
2|v(0)|2− λ1
p+ 1kvkp+1
Lp+1−λ2
2pkvk2p
L2p, forv∈H1(R).
10
Concentration-compactness method (ii)
• The minimization problem: Forp,λ1,λ2,Z andω satisfying the assumptions of our main theorem, the quantity
m(ω) = inf{Gω(v) :v∈H1(R)}, satisfies the following properties:
(a) (boundedness below) −∞<m(ω)<0; and, (b) (compactness) any sequencehn∈H1(R) such that
limn→∞Gω(hn) =m(ω) admits a subsequence converging to some h∈H1(R) withGω(h) =m(ω).
Local and global well posedness
for the NLS
Preliminaries (i)
The formal expressionAZ :=−∂x2−Zδ(x) represents all the self-adjoint extensions (von Neumann theory) associated to the following closed, symmetric, densely defined linear operator:
( A0=−∂x2
D(A0) ={g∈H2(R) :g(0) = 0}.
More precisely, the quantum operatorAZ =−∂x2−Zδ(x) is given by (AZf(x) =−f00(x) x6= 0,
D(AZ) ={f ∈H1(R)∩H2(R\{0}) :f0(0+)−f0(0−) =−Zf(0)}.
Preliminaries (ii)
Upon application of theFirst Representation Form Theorem(cf. Kato), it is possible to show that the associated form toAZ is given by
FZ[u,v] = Re Z +∞
−∞
u0(x)v0(x)dx−ZRe(u(0)v(0)),
where (u,v)∈D(FZ) =H1(R)×H1(R). The bilinear form defined above is closed and bounded below. In addition, operatorAZ =−∂x2−Zδ(x) can be extended as a linear bounded operatoru→AZufromH1(R) to H−1(R). This action is defined by
hAZu,vi=FZ[u,v], for u,v∈H1(R).
13
Spectral properties of A
Z• Essential spectrum: Σess(AZ) = [0,+∞), for allZ∈R.
• Discrete spectrum:
Σdis(AZ) = (
∅, Z≤0, −Z2/4 , Z>0, ForZ>0, ΨZ(x) =
qZ
2e−Z2|x| is thenormalized eigenfunction
associated to theunique negative simple eigenvalue−Z2/4. In addition, the operatorsAZ are bounded from below:
(AZ≥ −Z2/4, Z>0, AZ≥0, Z<0 Ref.: Albeverio, Gesztesy, Høegh-Kron (2005).
The Cauchy problem
Consider theCauchy problem,
( iut−AZu+ (λ1|u|p−1+λ2|u|2p−2)u= 0, u(0) =u0∈H1(R).
Ref. Cazenave, Courant LN, vol. 10 (2003).
15
Local well-posedness
Theorem (local well-posedness)
For any u0∈H1(R)and Z∈R, there exists T>0and a unique solution u∈C([−T,T];H1(R))∩C1([−T,T];H−1(R))to the NLS equation with u(0) =u0such that
lim
t→T−ku(t)kH1= +∞, if T <∞.
Moreover, the solution u(t)satisfies conservation of charge and energy:
ku(t)kL2=ku0kL2, E(u(t)) =E(u0), for all t∈[−T,T], where the energy functional E is defined as
E(v) :=1
2kvxk2L2−Z
2|v(0)|2− λ1
p+ 1kvkpL+1p+1−λ2
2pkvk2Lp2p, for v∈H1(R).
Proof sketch
• The nonnegative self-adjoint operatorA ≡AZ+β on the space X =L2(R), withβ =Z2/4 for Z>0 andβ= 0 forZ ≤0, and domainD(A) =D(AZ), induces a norm
kuk2X
A =kuxk2L2+ (β+ 1)kuk2L2−Z|u(0)|2, which is equivalent to the usual norm inH1(R).
• The self-adjoint operator AZ generates a strongly continuous group of unitary operatorsT(t)g=e−itAZg.
• Duhamel integral u(t) =T(t)u0+
Z t 0
T(t−s)(λ1|u(s)|p−1u(s) +λ2|u(s)|2p−2u(s))ds Direct application of Thm. 3.7.1 in Cazenave.
17
Remark: Gagliardo-Nirenberg interpolation inequality
For anyp>1,H1(R)⊂L2(R)∩Lp+1(R)∩L2p(R), inasmuch as the Gagliardo-Nirenberg interpolation inequality(cf. Leoni, 2017) yields
kukLp+1≤C1kukθL12kuxk1L−θ2 1, kukL2p≤C2kukθ2
L2kuxk1−θ2
L2 ,
with uniform constantsCj>0 andθ1= (p+ 2)/(2p+ 2)∈(0,1), θ2= (p+ 1)/2p∈(0,1).
Conservation of charge/energy
• Conservation of charge:
d
dt||u(t)||2L2= 2Re Z
R
utudx
= 2Re Z
R
−i(AZu)u+if(|u|2)|u|2dx= 0.
• Conservation of Energy: NLS equation can be written in the Hamiltonian form ut=−iE0(u(t)), then
d
dtE(u(t)) = Re Z
R
E0(u(t))utdx= Re Z
R
i|E0(u(t))|2dx= 0.
19
Auxiliary bound
Let us define the followingC1functional inH1(R), R(v) :=1
2kvxk2L2−Z
2|v(0)|2−λ2
2pkvk2p
L2p =E(v) + λ1
p+ 1kvkp+1
Lp+1.
Lemma (Auxiliary bound)
Let1<p<∞,λ1≤0,λ2<0and Z>0. Then there exists a uniform constant C=C(p,Z)>0such that
Z
2|v(0)|2≤R(v) +C, for all v∈H1(R).
Proof sketch
By Sobolev and Young’s inequalities, for anyZ>0 there exists C1=C1(Z)>0 such that forv∈H1(R)
Z|v(0)|2≤1
2kvxk2L2+C1kvk2L2(−1,1). Apply H¨older’s and Young’s inequalities to estimate
kvk2L2(−1,1)≤2(p−1)/p Z 1
−1
|v|2pdx 1/p
≤δkvk2p
L2p(−1,1)+ 2Cδ, for anyδ >0. Since λ2<0, chooseδ =−λ2/(2pC1)>0 to obtain
Z|v(0)|2≤1
2kvxk2L2−λ2
2pkvk2p
L2p+ 2C1Cδ.
21
Global well-posedness
Theorem (global well-posedness)
For every p>1, Z>0,λ1≤0andλ2<0the Cauchy problem is globally well-posed in H1(R).
Proof. Letu∈C([−T,T];H1(R))∩C1([−T,T];H−1(R)) be the local solution to the Cauchy problem fort∈(−T,T).
1
2kuxk2L2=E(u) +Z
2|u(t)|2+ λ1
p+ 1kukp+1
Lp+1+λ2
2pkuk2p
L2p
≤E(u(t)) +Z 2|u(t)|2
≤E(u(t)) +R(u(t)) +C
Thus, we arrive at 1
2kux(t)k2L2≤E(u(t)) +R(u(t)) +C≤2E(u(t)) +C.
In view thatu conserves charge and energy we finally conclude that ku(t)k2H1≤4E(u(0)) +ku(0)k2L2+ 2C,
which implies, together with lim
t→T−ku(t)kH1= +∞, if T<∞, that the time of existence of the solutionuisT = +∞.
23
Existence of standing waves
ODE problem
Recall theprofile equation (
φ00+Zδ(x)φ+ω φ+f(|φ|2)φ= 0,
φ∈H1(R), (ODE)
Hypothesis onf:
f ∈C1((0,+∞);R) with f(0) = 0,
f0(x)<0 for allx>0. (Hf) φ∈H1(R) is a solution in thedistributional senseif for everyχ∈H1(R)
0 = Re Z +∞
−∞ φ0(x)χ0(x)dx−Zφ(0)χ(0)−ω Z +∞
−∞
φ(x)χ(x)dx
− Z +∞
−∞
f(|φ|2(x))φ(x)χ(x)dx
.
24
Analysis of the (ODE) (i)
Lemma
Letφ∈H1(R), withφ00+Zδ(x)φ+ω φ+f(|φ(x)|2)φ(x) = 0in the distributional sense, then
φ∈Cj(R\{0})∩C(R), j= 1,2. (1a) φ00(x) +ω φ(x) +f(|φ(x)|2)φ(x) = 0, for x6= 0. (1b)
φ0(0+)−φ0(0−) =−Zφ(0). (1c)
φ0(x),φ(x)→0, if |x| →∞. (1d)
|φ0(x)|2+ω|φ(x)|2+g(|φ(x)|2) = 0, for x6= 0. (1e) where g(s) =
Z s 0
f(s)ds.
Analysis of the (ODE) (ii)
Lemma
Let p>1,ω,λ1,λ2∈Rand Z∈R\ {0}. Letφ be a non-trivial solution to(1a) -(1e). Thenφ(x)6= 0for all x∈Rand|φ|>0. −φ is also a solution.
Lemma (Useful)
Let p>1,ω,λ1,λ2∈Rand Z∈R\ {0}. Letφ be a non-trivial solution to(1a) -(1e). Then we have either one of the following:
(i) Im(φ(x)) = 0 for all x∈R; or,
(ii) there exists c∈Rsuch that Re(φ(x)) =c Im(φ(x))for all x∈R.
26
Explicit profile construction for ω 6= 0, Z = 0, λ
1≤ 0, λ
2< 0
By usingφ,φ0→0 asx→∞we obtain
[φ0]2+ω φ2+ 2α φp+1+β φ2p= 0, withα=λ1/(p+ 1),β=λ2/p. Then,
φ(x) =
"
−α ω +
pω β−α2
ω sinh (p−1)√
−ωx
#−p−11
,
is the profile of the standing wave solution provided that
− pλ12 (p+ 1)2λ2
<−ω.
Explicit construction
The function φ1(x) :=φ(−|x| −d), −l<d,
satisfies all the properties of our first lemma except possibly the jump condition: φ0(0+)−φ0(0+) =−Zφ(0). If we consider
R1: (−l,∞)→(1,∞) the diffeomorphism defined by R1(d) =
pω β−α2cosh((p−1)√
−ωd) pω β−α2sinh((p−1)√
−ωd) +α .
then, we get d=R1−1
Z 2√
−ω
, with Z>0 and −ω<Z2 4 .
28
Profile existence theorem; case ω 6= 0
Theorem
Let p>1,λ1≤0,λ2<0and Z>0 in the NLS equation. Then for all values ofω<0satisfying
− pλ12 (p+ 1)2λ2
<−ω<Z2 4
the familiy of standing wave solutions, u(x,t) =e−iωtφω, withφω given by
φω= α
−ω +
√v
−ωsinh
(p−1)√
−ω
|x|+R1−1 Z
2√
−ω
−p−11
are solutions to the NLS equation. Here v=ω β−α2.
-�� -� � � ��
���
���
���
���
���
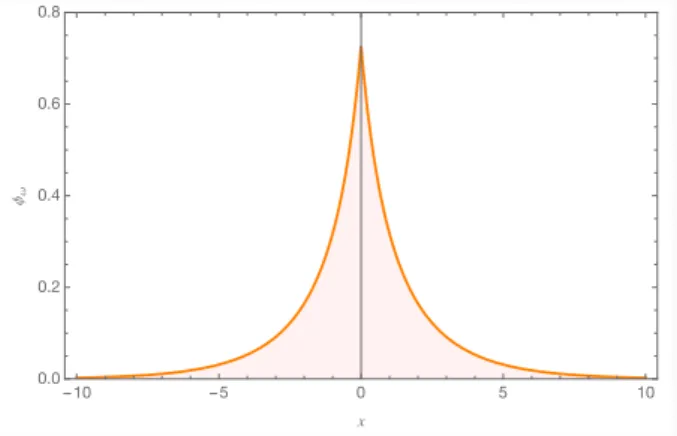
� ϕω
Figure 1: Profile functionφω=φω(x) for parameter valuesω=−0.25,Z= 2, p= 3,λ1=λ2=−1.
30
Figure 2: Time evolution of the standing wave solutionu(x,t) =e−iωtφω(x) withω=−0.25,Z= 2 and in the case of a quintic/cubic (p= 3), doubly repulsive (λ1=λ2=−1) nonlinearity.
-��� -��� ��� ��� ���
-���
-���
���
���
���
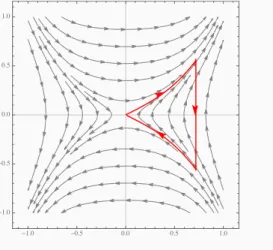
Figure 3: Dynamics in the (φ,φ0)-plane forf(x) =−x(1 +x2), that is, for λ1=λ2=−1 andω=−0.25, in the case of a quintic/cubic nonlinearity with p= 3.
32
Orbital stability
Critical points
Let us consider the functionalGω:H1(R)→Rfor valuesω≤0, defined as
Gω(v) =1
2kvxk2L2−Z
2|v(0)|2−ω
2kvk2L2−1 2
Z ∞
−∞
g(|v(x)|2)dx, and theset of critical pointsassociated toGω as
Aω={v∈H1(R) :Gω0(v) = 0,v6= 0}.
Hereg =g(·) is the antiderivative off =f(·). Forφ∈Aω we have the relation
Gω0(φ) =AZφ−ω φ−f(|φ|2)φ
33
Properties of the set of critical points (i)
Lemma
Let1<p<∞, Z>0and let ω∈Rbe such that ω+Z42 ≤0. Then the setAω is empty.
Proof. If there existsh∈H1(R)\ {0} satisfyingGω0(h) = 0, then 0 = d
dsG(sh)
s=1, and since hAZh,hi ≥ −Z2 4 khk2L2
for allh∈H1(R), we then obtain
0 =khxk2L2−Z|h(0)|2−ωkhk2L2− Z ∞
−∞
f(|h(x)|2)|h(x)|2dx
≥ −(Z2/4 +ω)khk2L2− Z ∞
−∞
f(|h(x)|2)|h(x)|2dx
≥ − Z ∞
−∞
f(|h(x)|2)|h(x)|2dx>0,
Properties of the set of critical points (ii)
Lemma
Let1<p<∞and Z∈R. Ifω>0then Aω=∅. Lemma
Letω∈Rand Z<0. Then, we have thatAω=∅.
Proofs by contradiction.
35
Properties of the set of critical points (ii)
Lemma
Let1<p<∞and Z∈R. Ifω>0then Aω=∅. Lemma
Letω∈Rand Z<0. Then, we have thatAω=∅. Proofs by contradiction.
Properties of the set of critical points (iii)
Lemma
Let p>1,λ1<0,λ2<0, Z >0andω such that −(p+1)pλ122
λ2 <−ω<Z42. Considering f(x) =λ1x(p−1)/2+λ2xp−1, then
Aω={eiθφω:θ∈R}.
Proof. It is clear that for allθ∈R, eiθφω∈Aω. Conversely, ifg∈Aω, theng satisfies all the necessary conditions to be a solution of the Euler-Lagrange equation and|g|>0. Goal: to show that there exist θ∈Rsuch that g(x) =eiθφω(x) for allx∈R.
36
• φω∈D(AZ) is the unique positive solution of the Euler-Lagrange equation. Indeed, ifv∈H1(R) is a positive solution thenv satisfies the IVP
(−ψ00(x) =ω ψ(x) +f(ψ2(x))ψ(x) :=H(ψ(x)), x>0, ψ(0) =c0, ψ0(0) =−Zc0/2,
where c0 is the unique positive root of Φω(c,Zc/2) =Z2
4 c2+ωc2+g(c2).
SinceHis locally Lipschitz around zero the IVP has a unique positive solution given byφω. Thus,v≡φω on (0,∞). Similar arguments show that v≡φω on (−∞,0). Hence,v(x) =φω(x) for allx∈R.
• Ifg(x) =eiθ(x)ρ(x) then θ,ρ>0 satisfy
( θ00ρ+ 2θ0ρ0= 0, x>0,
−(θ0)2ρ+ρ00+ω ρ+f(|ρ|2)ρ= 0, x>0.
The first equation together with the boundedness of|g0|imply that g(x) =eiθ0ρ(x) for allx∈(0,+∞). Then, from second equation and by the analysis above we necessarily have thatg(x) =eiθ0φω(x) for allx∈(0,∞). A similar analysis shows thatg(x) =eiθ1φω(x) for all x∈(−∞,0). Hence,
g(x) =eiθ0φω(x), for allx∈R.
38
The minimization problem
Let us suppose that 1<p<∞,Z>0,λ1≤0,λ2<0,ω is such that
− pλ12 (p+ 1)2λ2
<−ω<Z2
4 , and f(x) =λ1x(p−1)/2+λ2xp−1. Minimization problemassociated toGω:
m(ω) = inf{Gω(v) :v∈H1(R)}, and theminimal set
M(ω) ={u∈H1(R) :Gω(u) =m(ω)}.
The set of minima
Lemma
−∞<m(ω)<0and M(ω)⊂Aω.
Proof. First verify that−∞<m(ω). Write Gω(v) =R(v)−ω
2kvk2L2− λ1
p+ 1kvkp+1
Lp+1, v∈H1(R).
Then, by the auxiliary bound lemma we get Gω(v)≥R(v)≥Z
2|v(0)|2−C≥ −C,
for allv∈H1(R) and some uniformC>0, yielding−∞<m(ω).
40
To show thatm(ω)<0, letv(x) :=sh(x)∈H1(R) withs>0 and where h(x) =e−Z|x|2 is the eigenfunction of the operatorAZ associated to the eigenvalue −Z42. Therefore
Gω(v) =−s2 2
Z2 4 +ω
khk2L2−1 2
Z ∞
−∞
g(s2h2(x))dx.
Since −g(s2h2(x))<−f(s2)s2h2(x), Gω(v)≤ −s2
2khk2L2
Z2
4 +ω+f(s2) .
SinceZ2/4 +ω>0 and lims→0+f(s2) = 0 we conclude that there exists s0>0 such thatZ2/4 +ω>−f(s2)>0 for 0<s≤s0and so
Gω(s0h)<0. Lastly, supposeM(ω)6=∅. Then since forh∈M(ω) we haveh6= 0 andGω0(h) = 0, then by previous Lemmata we obtain M(ω)⊂Aω.
Auxiliary result: Br´ ezis-Lieb lemma
A refinement of Fatou’s lemma:
Lemma (Br´ezis-Lieb, 1983)
Let2≤q<∞and{uj} be a bounded sequence in Lq(R)such that uj(x)→u(x)a.e. in x∈Ras j→∞. Then,
kujkqLq− kuj−ukqLq− kukqLq→0, as j→∞.
42
Compactness
Lemma
Let hn∈H1(R)be such thatlimn→∞Gω(hn) =m(ω). Then there exists a subsequence hnj and h∈H1(R)such that limnj→∞hnj=h in H1(R)and Gω(h) =m(ω).
Proof. First, notice that for allv∈H1(R) Iω(v) :=1
2kvxk2L2−ω 2kvk2L2
=Gω(v) +Z
2|v(0)|2+ λ1
p+ 1kvkp+1
Lp+1+λ2
2pkvk2p
L2p. Sinceω<0, it follows that Iω(v) is equivalent tokvk2H1. From the fact thatλ1,λ2<0, we obtain
1
2kvxk2L2−ω
2kvk2L2≤Gω(v) +R(v) +C≤2Gω(v) +C, for some uniformC>0.
Hence, it is clear that if the sequenceGω(hn) converges then the sequencehn is bounded inH1(R). Thus, there exists a subsequencehnj andh∈H1(R) such that {hnj}converges wealky tohinH1(R). Since H1(−1,1) is compactly embedded in C[−1,1], we deduce that
hnj(0)→h(0). Thus,
m(ω)≤Gω(h)≤lim inf
nj→∞Gω(hnj) =m(ω), which implies thath∈M(ω).
Now, sincehnj*hweakly inH1(R) we have that hnj(x)→h(x) a.e. in x∈Rand also that
khnj−hk2L2+khk2L2=khnjk2L2+o(1), k∂xhnj−hxk2L2+khxk2L2=k∂xhnjk2L2+o(1), asnj→∞.
44
khnjkH1 uniformly bounded⇒ khnjkLp+1 andkhnjkL2p are uniformly bounded (by Gagliardo-Nirenberg interpolation inequalities). As hnj(x)→h(x) a.e. inx∈R, by Br´ezis-Lieb lemma we get
khnj−hkp+1
Lp+1+khkp+1
Lp+1=khnjkp+1
Lp+1+o(1), khnj−hk2p
L2p+khk2p
L2p=khnjk2p
L2p+o(1), asnj→∞.
Combining yields
Gω(hnj−h) +Gω(h) =Gω(hnj) +o(1), as nj→∞.
From the def. ofIω,
0≤Iω(hnj−h)≤Iω(hnj−h)− λ1
p+ 1khnj−hkp+1
Lp+1−λ2
2pkhnj−hk2p
L2p
=Gω(hnj−h) +Z
2|hnj(0)−h(0)|2
=Gω(hnj)−Gω(h) +o(1),
inasmuch ashnj(0)→h(0). This yieldshnj→hinH1(R).
Characterization of the minimal set
Lemma
M(ω) =Aω={eiθφω:θ∈R}, whereφω denotes the standing wave profile.
Proof. From the previous lemmas, we infer thatM(ω)6=∅. Then there existsh∈H1(R) such thatGω(h) =m(ω), that is,h∈M(ω). Since M(ω)⊂Aω, h∈Aω. Thus, there existsθ0∈Rsuch thath=eiθ0φω. Now, sinceφω∈H1(R) and
Gω(φω) =Gω(h) =m(ω),
thenφω∈M(ω). This implies thatAω⊂M(ω). The other inclusion was already proved above.
46
Proof of the main theorem
Suppose that the standing wavee−iωtφω is orbitally unstable. Then there existsε0>0, a sequence{hn(t)}of solutions of the NLS equation and a sequencetn>0, such that
n→∞limkhn(0)−φωkH1= 0, (2a)
θ∈infR
khn(tn)−eiθφωkH1≥ε0. (2b) SinceGω is conserved by the flow of the NLS equation, we get that Gω(hn(tn)) =Gω(hn(0)) for alln∈N. Then (2a) and continuity ofGω yield
n→∞limGω(hn(tn)) =Gω(φω) =m(ω).
Henceforth, from the former results there exists a subsequencehnj such thathnj(tnj)→hwithGω(h) =m(ω). Thenh∈Aω andh=eiθ0φω for someθ0∈R. Therefore,
nlimj→∞hnj(tnj) =eiθ0φω, inH1(R), which contradicts
θ∈infR
khn(tn)−eiθφωkH1≥ε0. Hence, we conclude thate−iωtφω is orbitally stable.
48
Reference
• J. Angulo Pava, C. A. Hern´andez Melo, R. G. P.,J. Math. Phys.
(2019), in press.
Happy birthday Kevin!
50