Los motores DC conectados en serie se caracterizan por tener una curva par-velocidad inversa. La tesis presenta el control activo de perturbaciones (ADRC) para controlar la velocidad angular del eje del motor en una conexión en serie.
Estado del arte
El surgimiento del método en América se remonta a los años 70 del siglo pasado en los trabajos de C.D. El término ADRC se utilizó por primera vez en [15], con la idea de introducir el término en la literatura inglesa.
Planteamiento del problema
Justificaci´ on
Pertinencia
Relevancia
Motivaci´ on
Hip´ otesis
Objetivos
Objetivos secundarios
Metas
X Construir una tarjeta electrónica para el acondicionamiento de señales, principalmente aquellas relacionadas con la medición de corriente, voltaje y velocidad angular.
Metodolog´ıa
Se seleccionan las partes mecánicas del proyecto, en el caso específico de esta investigación solo se seleccionan los sensores, ya que el motor DC en conexión en serie será el actuador. Una vez diseñado el controlador, se analiza el desempeño de la técnica de control y, si es necesario, se realizan los ajustes oportunos.

Estructura del documento
Una vez realizados todos los ajustes tanto del sistema físico como de la tecnología de control, se crea la versión final del proyecto. Adicionalmente se presenta la estructura del documento 11 prototipo necesario para implementar la técnica de control, las partes que lo componen, la descripción de cada una de ellas y los resultados obtenidos al implementar la técnica de control sobre el prototipo construido. A partir de una segunda parte de simulaciones, estas se acercan más a los resultados experimentales.
Motores de Corriente Directa
Tipos de motores de CD
Motor de derivación: el devanado de campo está conectado en paralelo con el devanado del inducido. Parte de la corriente absorbida fluye a través del devanado del inducido y, por tanto, a través de un devanado de campo;
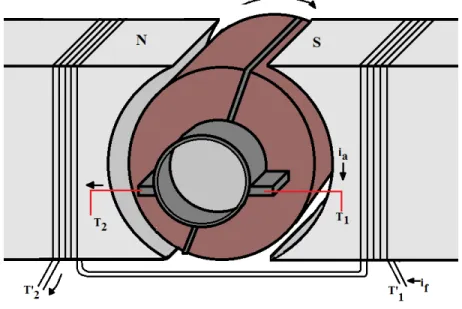
Motor de CD en conexi´ on en serie
De esta forma, toda la corriente absorbida por el motor circula una parte por el devanado de campo y la otra por el devanado del inducido. Motor compuesto: este motor puede verse como una combinación del motor en derivación y el motor en conexión en serie, ya que uno de los devanados de campo está en serie con el devanado del inducido y el otro en paralelo.
Sistemas de control de velocidad
La realimentación de velocidad ωf b (Figura 2.3) se obtiene en la salida del bloque WM. El sistema de control que se muestra en la Figura 2.3 se utiliza en los análisis preliminares de controladores de velocidad. Por esta razón, el par de referencia τref derivado del controlador de velocidad Wsc(s) se convierte en la corriente de referencia del inducido Ia* =τref/(kmφp).
Sistemas de control de velocidad 19 En aras de la simplicidad de las consideraciones de entrada, el amplificador de potencia que suministra la corriente de armadura en la Figura 2.2 se reduce a una fuente de corriente idealizada y controlable.
![Figura 2.2: Elementos b´ asicos de un sistema de control de velocidad [1].](https://thumb-us.123doks.com/thumbv2/123dok_es/12372650.0/32.918.127.732.133.406/figura-2-2-elementos-asicos-sistema-control-velocidad.webp)
Control por Rechazo Activo de Perturbaciones
Aplicaciones pr´ acticas del ADRC
Este tipo de aplicaciones se pueden encontrar en prácticamente todos los sectores industriales, desde la automatización de fábricas y la robótica hasta los discos duros de computadoras de alta tecnología. Los problemas de control de la electrónica de potencia son un desafío debido a la dinámica no lineal de los dispositivos semiconductores y a las perturbaciones externas. Además, la parametrización ADRC reduce la sintonización de un parámetro.
En la Universidad Tecnológica Mixteca se aplicó esta técnica de control a motores de corriente continua, logrando resultados exitosos.
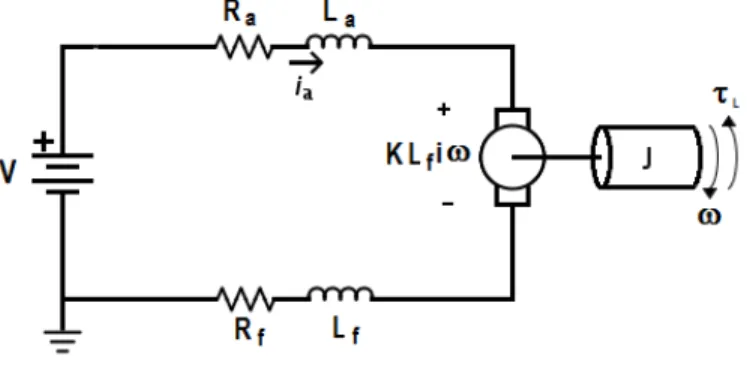
Modelo matem´ atico del motor de CD en conexi´ on en serie
Sistema de control no-lineal af´ın
Planitud diferencial
Parametrizaci´ on diferencial del motor de CD en conexi´ on en serieen serie
No es difícil ver en (3.15) y (3.18) que todas las variables del sistema, incluida la entrada, son funciones diferenciales de la salida plana ω =F y de un número finito de sus derivadas en el tiempo, por lo que el sistema diferencial departamento. Se conocen los valores nominales de los parámetros del sistema Rf, Lf, Ra, La, km, J, D. Las estimaciones de la velocidad angular, ω(t), y el par de carga τL(t) y un número finito de sus derivadas temporales, digamos m de las mismas, vistas como funciones del tiempo, están acotadas de manera absolutamente uniforme para cada trayectoria. , ω (t), del sistema, converge a una vecindad de una trayectoria de referencia dada, ω∗(t), mediante la acción apropiada de un determinado controlador de retroalimentación suave.
De la ecuación (3.18) se resuelve la derivada de mayor orden de la producción plana y se obtiene lo siguiente:
Observador de estado extendido
El observador de estado extendido está diseñado para evaluar los estados originales y el estado extendido. De esta forma, la perturbación es rechazada por su valor estimado obtenido por el observador. La diferencia entre ESO y otros estimadores de perturbaciones es que no solo evalúa las perturbaciones, sino también la dinámica de la central eléctrica; además, ESO requiere un conocimiento mínimo de la central eléctrica, a diferencia de otros observadores.
Resultados de simulaci´ on
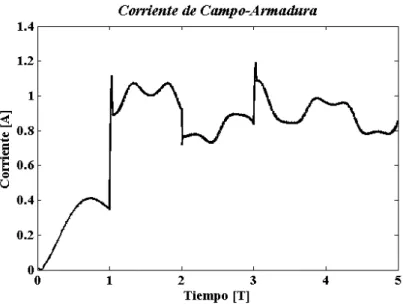
El gráfico de la Figura 3.3 muestra la trayectoria de la velocidad angular del eje del motor bajo la influencia del esquema de control propuesto mediante cancelación activa de ruido. En este gráfico se puede observar que existen pequeñas variaciones en la velocidad del eje del motor, especialmente en los segundos 1, 2 y 3. Este error (ver Figura 3.4) se debe a que en esos momentos el par de carga se altera. ha sido identificado. El gráfico de la Figura 3.5 muestra el comportamiento del campo o corriente de armadura del motor, bajo la influencia del algoritmo de control propuesto.
Finalmente, la Figura 3.6 muestra la perturbación estimada por el observador de ESO, que, como ya se mencionó, incluye tanto la perturbación exógena como las perturbaciones de naturaleza interna.
Partes del prototipo
- Computadora con Matlab & Simulink
- Tarjeta de control DS1104 dSPACE
- Etapa de potencia y acondicinamiento de las se˜ nales
- Motor de CD en conexi´ on en serie y motor/dinam´ ometro
Para calcular la constante mecánica del motor km, el circuito de campo se alimenta con un voltaje constante (Vf = 25v), el voltaje del inducido del motor se varía en el intervalo cerrado Va ∈[10,40], y la corriente del inducido ia y se miden la velocidad angular w. Mediante (3.1), aia se considera una constante, y el valor de la constante mecánica del motor se resuelve como: km = Va−Rwaia. Promediando los valores nominales de la tabla 4.3, se obtiene el siguiente valor nominal de la constante mecánica como k = 0,1708(W bAN m)1.
1 La constante mecánica km y la constante de fuerza contraelectromotriz ke del motor son iguales km=ke, debido a la ley de conservación de la energía [50].

Resultados
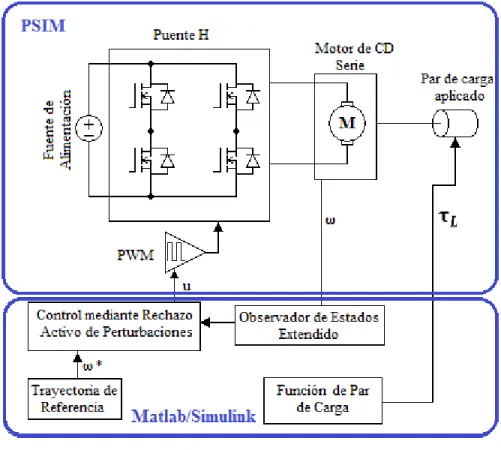
Diagrama a bloques del sistema de control
El circuito de la figura 4.5 consta de diversas partes que garantizan el correcto funcionamiento de la planta. El comportamiento del observador, el algoritmo de control y la trayectoria de referencia es lo que se diseñó en el capítulo 3. En el caso de la figura 4.7, podemos ver que se ha eliminado el bloque que representaba la planta en PSIM y se han eliminado bloques específicos de la tarjeta dSPACE. han sido colocados en su lugar.
Estos bloques son conversores ADC (Analog to Digital Converter, sus siglas en inglés) para los datos que recibirá el prototipo experimental, conversores DAC (Digital to Analog Converter, sus siglas en inglés) para enviar información a través de la tarjeta dSPACE y un PWM. Módulo para realizar la conmutación de los IGBT en el circuito que alimenta el motor.
Registro de los resultados
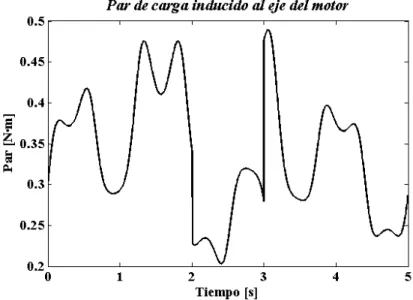
El par que se programó para aplicar al eje del motor se muestra en la Figura 4.11, aunque este no es el par que realmente experimenta el motor, esto se demuestra gracias al estimador de par. El momento de carga que realmente recibe el eje del motor tiene la forma del gráfico que se muestra en la figura 4.12. La Figura 4.13 muestra las perturbaciones estimadas con el observador de estado extendido, no se utilizan unidades para esta variable ya que lo que se estima son perturbaciones externas y variaciones paramétricas de la planta.
Por otro lado, para conocer el comportamiento del controlador, la entrada de control se muestra en la Figura 4.14. Alcanza su valor máximo en los primeros segundos de funcionamiento porque el motor debe alcanzar la velocidad deseada.
Conclusiones
La velocidad angular del motor sigue con precisión la trayectoria de velocidad deseada, incluso en presencia de perturbaciones, esto se logra gracias al monitor de condición extendido. La metodología que se siguió en el desarrollo de la tesis permitió verificar el correcto funcionamiento de cada etapa antes de proceder con el desarrollo de los siguientes pasos. No es necesario utilizar un puente H completo en la etapa de potencia, ya que sólo se controla la velocidad y no la dirección del motor.
Aunque existan corrientes negativas, el motor seguirá girando en el mismo sentido debido a su configuración; Si desea cambiar de dirección, debe realizar ajustes mecánicos en el sistema.
Trabajos futuros
Este artículo analiza la aplicación de la técnica ADRC para controlar la velocidad angular de un motor de CC conectado en serie. La sección 2 analiza cuestiones relacionadas con el modelo dinámico del motor de CC en serie y su propiedad estructural de planitud diferencial. Las estimaciones de la velocidad angular ω(t) y el par de carga τL(t) y el número finito de sus derivadas temporales, digamos mo, vistas como funciones del tiempo, están acotadas de manera absolutamente uniforme para cada trayectoria. ,ω(t), de un sistema que converge a una vecindad de una trayectoria de referencia dada, ω∗(t), mediante la operación apropiada de un controlador de retroalimentación específico.
El gráfico superior de la Figura 3 muestra tanto la trayectoria de velocidad angular deseada (línea discontinua) como la velocidad angular del eje del motor (línea continua) bajo la influencia del motor, un esquema de control propuesto mediante la supresión activa de perturbaciones. El gráfico inferior de la misma figura muestra la ley de control aplicada. La Figura 5 muestra el comportamiento de la corriente de campo del motor bajo la influencia del algoritmo de control propuesto.