A posteriori error analysis of a mixed finite element method for the coupled Brinkman–Forchheimer and double-diffusion equations
∗Sergio Caucao† Gabriel N. Gatica‡ Ricardo Oyarz´ua§ Paulo Z´u˜niga¶
Abstract
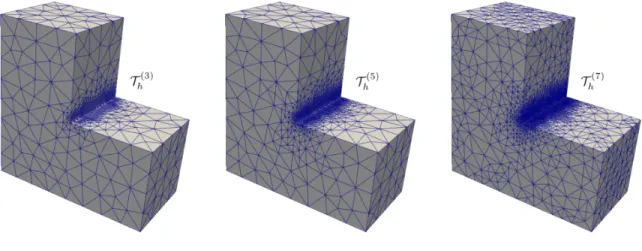
In this paper we consider a partially augmented fully-mixed variational formulation that has been recently proposed for the coupling of the stationary Brinkman–Forchheimer and double-diffusion equations, and develop an a posteriorierror analysis for the 2D and 3D versions of the associated mixed finite element scheme. Indeed, we derive two reliable and efficient residual-baseda posteriori error estimators for this problem on arbitrary (convex or non-convex) polygonal and polyhedral regions. The reliability of the proposed estimators draws mainly upon the uniform ellipticity and inf-sup condition of the forms involved, a suitable assumption on the data, stable Helmholtz decompositions in Hilbert and Banach frameworks, and the local approximation properties of the Cl´ement and Raviart–Thomas operators. In turn, inverse inequalities, the localization technique based on bubble functions, and known results from previous works, are the main tools yielding the efficiency estimate. Finally, several numerical examples confirming the theoretical properties of the estimators and illustrating the performance of the associated adaptive algorithms, are reported. In particular, the case of flow through a 3D porous media with channel networks is considered.
Key words: Brinkman–Forchheimer equations, double-diffusion equations, stress-velocity formula- tion, mixed finite element methods, a posteriorierror analysis
Mathematics subject classifications (2000): 65N30, 65N12, 65N15, 35Q79, 80A20, 76R05, 76D07
1 Introduction
We have recently introduced in [8] a partially augmented-mixed finite element method for the problem of steady double-diffusive convection in a fluid-saturated porous medium described by the coupling of the stationary Brinkman–Forchheimer and double-diffusion equations in Rd, d∈ {2,3}. In there, the fluid pseudostress tensor, and the pseudoheat and pseudodiffusive vectors are introduced as further unknowns of the system (besides the velocity, temperature and concentration fields), thus yielding a
∗This research was partially supported by ANID-Chile through the projects ACE 210010,Centro de Modelamiento Matem´atico(FB210005),Anillo of Computational Mathematics for Desalination Processes(ACT210087), and Fondecyt projects 1200666 and 11220393; by Centro de Investigaci´on en Ingenier´ıa Matem´atica (CI2MA), Universidad de Concepci´on; and by Universidad del B´ıo-B´ıo through VRIP-UBB project 2120173 GI/C.
†Departamento de Matem´atica y F´ısica Aplicadas, Universidad Cat´olica de la Sant´ısima Concepci´on, Casilla 297, Concepci´on, Chile, email: [email protected].
‡CI2MA and Departamento de Ingenier´ıa Matem´atica, Universidad de Concepci´on, Casilla 160-C, Concepci´on, Chile, email: [email protected].
§GIMNAP-Departamento de Matem´atica, Universidad del B´ıo-B´ıo, Casilla 5-C, Concepci´on, Chile, and CI2MA, Universidad de Concepci´on, Casilla 160-C, Concepci´on, Chile, email: [email protected].
¶Department of Applied Mathematics, University of Waterloo, Waterloo, ON N2L 3G1 Canada, email: paulo.
fully-mixed formulation. Furthermore, since the nonlinear term in the Brinkman–Forchheimer equa- tion requires the velocity to live in H1 instead of L2 as usual, the approach in [8] follows similarly to [13], [14] and [27], so that the variational formulation is augmented with suitable Galerkin type terms, which forces both the temperature and concentration scalar fields to live in L4. As a consequence, the aforementioned pseudoheat and pseudodiffusive vectors live in a suitable H(div)-type Banach space.
The resulting augmented scheme is written equivalently as a fixed point equation, and the well-known Schauder and Banach theorems, combined with the Lax–Milgram and Banach–Neˇcas–Babuˇska theo- rems, are utilized to address the solvability of the continuous problem. As for the associated Galerkin scheme, whose solvability is established similarly to the continuous case by using the Brouwer and Banach fixed-point theorems, we use Raviart–Thomas spaces of order k ≥ 0 to approximate the pseudostress tensor, and the pseudoheat and pseudodiffusive vectors, whereas continuous piecewise polynomials of degree≤k+ 1 are employed for the velocity, and piecewise polynomials of degree≤k for the temperature and concentration fields. Optimal a priori error estimates were also derived in [8].
On the other hand, it is well known that under the eventual presence of singularities or high gradients of some components of the solution, most of the standard Galerkin procedures such as finite element and mixed finite element methods inevitably lose accuracy, and hence one usually tries to recover it by applying an adaptive algorithm based ona posteriorierror estimates. In particular, this powerful tool has been applied to quasi-Newtonian fluid flows obeying the power law, which include the Brinkman–
Forchheimer model, and among the respective references we first mention [19], where the authors propose and analyze ana posteriorierror estimator, defined via a non-linear projection of the residues of the variational equations, for a three-field model of a generalized Stokes problem. In turn, a fully local residual-based a posteriorierror estimator for the mixed formulation of thep-Laplacian problem in a polygonal domain, is derived in [16]. In this case, the authors study the reliability of the estimator defining two residues and then bounding the norm of the errors in terms of the norms of these residues.
Later on, a posteriori error analyses for the aforementioned Brinkman–Darcy–Forchheimer model in velocity-pressure formulation have been developed in [31]. In fact, two types of error indicators related to the discretization and to the linearization of the problem are established there. Furthermore, the firsta posteriorierror analysis of the primal-mixed finite element method for the Navier–Stokes/Darcy–
Forchheimer coupled problem was developed in [9]. More precisely, usual techniques employed within the Hilbertian framework are extended in [9] to the case of Banach spaces by deriving a reliable and efficienta posteriorierror estimator for the mixed finite element method introduced in [6]. The above includes corresponding local estimates and new Helmholtz decompositions for the reliability, as well as respective inverse inequalities and local estimates of bubble functions for the efficiency. We refer to [4]
for a recent a posteriori error analysis of a momentum conservative Banach space-based mixed finite element method for the Navier–Stokes problem. Standard arguments relying on duality techniques, a suitable Helmholtz decomposition in a Banach framework and classical approximation properties, are combined there with corresponding small data assumptions to derive the reliability of the estimators.
Finally, we also refer to some works devoted to thea posteriori error analysis of Hilbert spaces-based variational formulations of nonlinear and coupled problems, particularly Navier–Stokes, Boussinesq, Oldroyd–Stokes, and related flow-transport coupling models (see, e.g. [23], [25], [17], [28], [10], [14], [27], [15], and [7]).
According to the above discussion, and in order to complement the study started in [8] for the cou- pling of the Brinkman–Forchheimer and double-diffusion equations, in the present paper we combine the a posteriori error analysis techniques developed in [7], [14], [26], and [28] for augmented-mixed formulations in Hilbert spaces, with the ones recently obtained in [9], [4], [11], and [24] for Banach spaces-based mixed formulations, and develop two reliable and efficient residual-based a posteriori
error estimators in 2D and 3D for the partially augmented-mixed finite element method from [8].
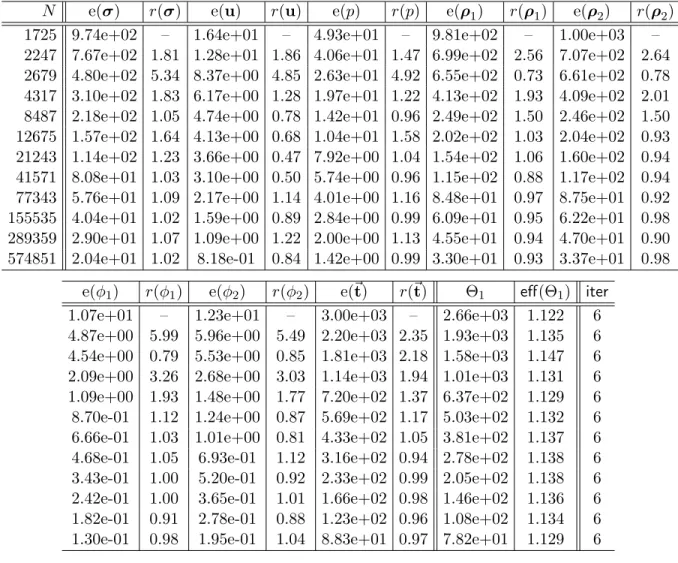
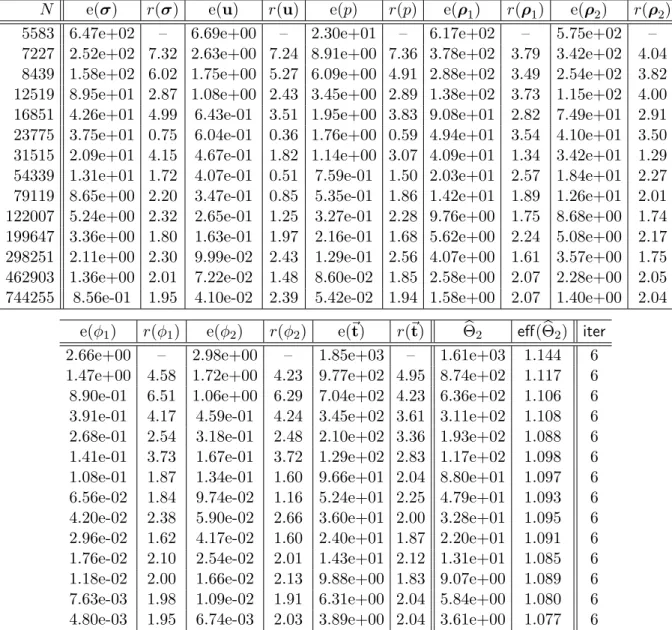
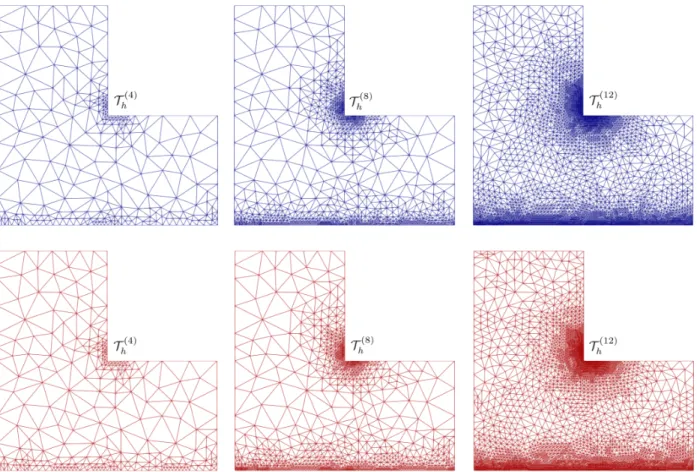
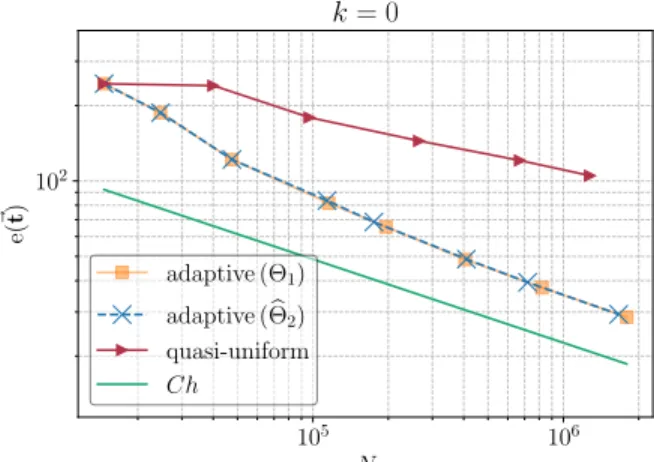
More precisely, in each case we derive a global quantity Θ that is expressed in terms of calculable local indicators ΘT defined on each element T of a given triangulation T. This information can be afterwards used to localize sources of error and construct an algorithm to efficiently adapt the mesh.
In this way, the estimator Θ is said to be efficient (resp. reliable) if there exists a positive constant Ceff (resp. Crel), independent of the meshsizes, such that
CeffΘ + h.o.t. ≤ kerrork ≤ CrelΘ + h.o.t. ,
where h.o.t. is a generic expression denoting one or several terms of higher order. We observe that, up to our knowledge, the present work provides the firsta posteriorierror analyses of mixed finite element methods for the coupling of the stationary Brinkman–Forchheimer and double-diffusion equations.
This paper is organized as follows. The remainder of this section introduces some standard notations and functional spaces. In Section 2 we recall from [8] the model problem and its continuous and discrete augmented fully-mixed variational formulations. Next, in Section 3 we provide some preliminary results to be employed in the derivation and analysis of our a posteriori error estimator. The core of the present work is given by Section 4, where we develop the a posteriori error analysis. In Section 4.1 we employ the uniform ellipticity and inf-sup condition of the bilinear forms involved, suitable Helmholtz decompositions in Hilbert and Banach frameworks, the local approximation properties of the Cl´ement and Raviart–Thomas operators, and known estimates from [4] and [26], to derive a reliable residual-based a posteriori error estimator. Then, inverse inequalities, and the localization technique based on element-bubble and edge-bubble functions are utilized in Section 4.2 to prove the efficiency of the estimator. A second (also reliable and efficient) residual-based a posteriori error estimator is introduced and studied in Section 5, where the Helmholtz decomposition in a Hilbert framework is not employed in the corresponding proof of reliability. Finally, numerical results confirming the reliability and efficiency of thea posteriorierror estimators, and showing the good performance of the associated adaptive algorithms, are presented in Section 6.
1.1 Preliminary notations
Let Ω ⊂Rd, d∈ {2,3}, denote a bounded domain with polyhedral boundary Γ, and denote by n the outward unit normal vector on Γ. Standard notation will be adopted for Lebesgue spaces Lp(Ω) and Sobolev spaces Ws,p(Ω), with s ∈ R and p > 1, whose corresponding norms, either for the scalar, vector, or tensor case, are denoted by k · k0,p;Ω and k · ks,p;Ω, respectively. In particular, when p= 2, Ws,2(Ω) is also denoted by Hs(Ω), and the writing of its norm and seminorm are simplified tok · ks,Ω and| · |s,Ω, respectively. ByMandMwe will denote the corresponding vector and tensor counterparts of the generic scalar functional space M, andk · k, with no subscripts, will stand for the natural norm of either an element or an operator in any product functional space. In turn, for any vector field v = (vi)i=1,d, we let ∇v and div(v) be its gradient and divergence, respectively. Furthermore, given tensor fields τ = (τij)i,j=1,d and ζ = (ζij)i,j=1,d, we let div(τ) be the divergence operator div acting along the rows ofτ, and define the transpose, the trace, and the deviatoric tensor of τ, as well as the tensor inner product between τ and ζ, respectively, as
τt:= (τji)i,j=1,d, tr(τ) :=
Xd i=1
τii, τd:=τ− 1
dtr(τ)I, and τ :ζ :=
Xd i,j=1
τijζij,
where Iis the identity matrix in Rd×d. In what follows, when no confusion arises, | · |will denote the Euclidean norm in Rd or Rd×d. Additionally, given p > 1, we define the following tensor and vector
functional spaces (see [8, Section 2.2] for details):
H0(div; Ω) := n
τ ∈H(div; Ω) : Z
Ω
tr(τ) = 0o
(1.1) and
H(divp; Ω) := n
η∈L2(Ω) : div(η)∈Lp(Ω)o
, (1.2)
endowed with the norms
kτk2div;Ω := kτk20,Ω+kdiv(τ)k20,Ω and kηkdivp;Ω := kηk0,Ω+kdiv(η)k0,p;Ω,
respectively. In addition, H1/2(Γ) is the space of traces of functions of H1(Ω) and H−1/2(Γ) denotes its dual. Also, by h·,·iΓ we will denote the corresponding product of duality between H−1/2(Γ) (resp.
H−1/2(Γ)) and H1/2(Γ) (resp. H1/2(Γ)).
2 The model problem and its variational formulation
In this section we recall from [8] the model problem of interest, its fully-mixed variational formulation, the associated Galerkin scheme, and the main results concerning the corresponding solvability analyses.
2.1 The coupling of the Brinkman–Forchheimer and double-diffusion equations In what follows we consider the model introduced in [29] (see also [8]), which is given by a steady double-diffusive convection system in a fluid saturated porous medium. More precisely, we focus on solving the coupling of the incompressible Brinkman–Forchheimer and double-diffusion equations, which reduces to finding a velocity fieldu, a pressure fieldp, a temperature fieldφ1and a concentration field φ2, the latter two defining a vectorφ:= (φ1, φ2), such that
−ν∆u+K−1u+F|u|u+∇p = f(φ) in Ω, div(u) = 0 in Ω,
−div(Q1∇φ1) +R1u· ∇φ1 = 0 in Ω,
−div(Q2∇φ2) +R2u· ∇φ2 = 0 in Ω, u=uD, φ1 =φ1,D, and φ2 = φ2,D on Γ,
Z
Ω
p = 0,
(2.1)
with parameters ν :=Daµ/µe and F:=ϑDaR1, whereDa stands for the Darcy number,µethe viscosity, µ the effective viscosity, R1 the thermal Rayleigh number, R2 the solute Rayleigh number, and ϑis a real number that can be calculated experimentally. In addition, the Dirichlet boundary data is given by uD∈H1/2(Γ),φ1,D∈H1/2(Γ) and φ2,D∈H1/2(Γ). Owing to the incompressibility of the fluid and the Dirichlet boundary condition for u, the datumuDmust satisfy the compatibility condition
Z
Γ
uD·n = 0. (2.2)
In turn, the external force f is defined by
f(φ) := −(φ1−φ1,r)g+ 1
%(φ2−φ2,r)g,
with g representing the potential type gravitational acceleration,φ1,r the reference temperature,φ2,r
the reference concentration of a solute, both of them in L4(Ω), and%is another parameter experimen- tally valued that can be assumed to be greater than 1 (see [29, Section 2] for details). In turn, the permeability, thermal diffusion and concentration diffusion tensors are denoted, respectively, byK,Q1
and Q2, all them lying inL∞(Ω). Moreover,Kand the inverses of Q1 andQ2, are uniformly positive definite tensors, which means that there exist positive constants CK,CQ1, and CQ2, such that
v·K(x)v ≥ CK|v|2 and v·Q−1j (x)v ≥ CQj|v|2 ∀v∈Rn,∀x∈Ω, j∈ {1,2}. (2.3) Next, in order to derive a fully-mixed formulation for (2.1), in which the Dirichlet boundary condi- tions become natural ones, we now proceed as in [8], and introduce the pseudostress tensor, and the pseudoheat and pseudodiffusive vectors as further unknowns, that is
σ := ν∇u−pI, ρ1:=Q1∇φ1−R1φ1u, ρ2:=Q2∇φ2−R2φ2u in Ω. (2.4) In this way, applying the trace operator to σ and utilizing the incompressibility condition div(u) = 0 in Ω, one arrives at
p=−1
dtr(σ) in Ω. (2.5)
Hence, replacing (2.5) back into the first equation of (2.4), we find that our model problem (2.1) can be rewritten, equivalently, as follows: Find (σ,u) and (ρj, φj), j ∈ {1,2}, in suitable spaces to be indicated below, such that
1
ν σd = ∇u in Ω,
−div(σ) +K−1u+F|u|u = f(φ) in Ω, Q−1j ρj+RjQ−1j φju = ∇φj in Ω,
−div(ρj) = 0 in Ω, u=uD and φ = φD on Γ,
Z
Ω
tr(σ) = 0,
(2.6)
where the Dirichlet datum for φ is certainly given by φD := (φ1,D, φ2,D). At this point we stress that, as suggested by (2.5), pis eliminated from the present formulation and computed afterwards in terms of σ by using that identity. This fact justifies the last equation in (2.6), which ensures that the resulting psatisfies R
Ωp= 0.
2.2 The fully-mixed variational formulation
We begin by recalling from [8, Section 2.2] the augmented fully-mixed variational formulation for the coupling of the Brinkman–Forchheimer and double-diffusion equations (cf. (2.6)), which reads: Find (σ,u)∈H0(div; Ω)×H1(Ω) and (ρj, φj)∈H(div4/3; Ω)×L4(Ω),j ∈ {1,2}, such that
A((σ,u),(τ,v)) +Bu((σ,u),(τ,v)) = FD(τ,v) +Fφ(τ,v), aj(ρj,ηj) +b(ηj, φj) +cj(u;φj,ηj) = Gj(ηj),
b(ρj, ψj) = 0,
(2.7)
for all (τ,v)∈H0(div; Ω)×H1(Ω) and for all (ηj, ψj)∈H(div4/3; Ω)×L4(Ω), where, givenw∈H1(Ω), A, Bw, aj, b, andcj(w;·,·) are the forms defined, respectively, as
A((σ,u),(τ,v)) := 1 ν
Z
Ω
σd :τd+ Z
Ω
Kdiv(σ)·div(τ) +κ1 Z
Ω
∇u−1 νσd
:∇v+κ2 Z
Γ
u·v, (2.8) Bw((σ,u),(τ,v)) := −F
Z
Ω
K|w|u·div(τ), (2.9) and
aj(ρj,ηj) :=
Z
Ω
Q−1j ρj·ηj, b(ηj, ψj) :=
Z
Ω
ψjdiv(ηj), (2.10) cj(w;ψj,ηj) := Rj
Z
Ω
Q−1j ψjw·ηj, (2.11)
for all (σ,u),(τ,v) ∈ H0(div; Ω)×H1(Ω) and for all (ρj, φj),(ηj, ψj) ∈ H(div4/3; Ω)×L4(Ω). In turn, given ϕ:= (ϕ1, ϕ2)∈L4(Ω),FD, Fϕ, and Gj are the bounded linear functionals defined by
FD(τ,v) := hτn,uDiΓ+κ2
Z
Γ
uD·v, Fϕ(τ,v) := − Z
Ω
K f(ϕ)·div(τ), (2.12) for all (τ,v)∈H0(div; Ω)×H1(Ω) and
Gj(ηj) :=
ηj·n, φj,D
Γ, (2.13)
for all ηj ∈H(div4/3; Ω). Notice thatκ1 andκ2 are positive parameters that can be taken as (see [8, Lemma 3.2 and eq. (3.36)] for details):
κ1=ν and κ2 = ν
2. (2.14)
These particular values will be used later on for the computational implementation of the Galerkin scheme associated with (2.7). Next, we recall from [8] that u ∈ Wr :=
w∈H1(Ω) : kwk1,Ω≤r , where r∈(0, r0), withr0:= min{r1, r2} and
r1 := αA
2FkKk∞ki4k2, r2:= min{r21, r22}, r2j := γj
2RjkQ−1j k∞ki4k, (2.15) where i4 is the injection ofH1(Ω) into L4(Ω), whereas αA and γj are positive constants establishing ellipticity and a global inf-sup condition, respectively, of A and the bilinear form Aj that arises after adding the left hand sides of the last two equations of (2.7), but excludingcj (cf. [8, eqns. (3.23) and (3.28)]). According to [8, eq. (3.25)], and using the fact that u∈Wr, we have that the bilinear form A+Bu is uniformly elliptic onHBF:=H0(div; Ω)×H1(Ω) with positive constantαA/2 independent of h. This implies that
sup
06=(τ,v)∈HBF
(A+Bu)((ζ,z),(τ,v))
k(τ,v)k ≥ αA
2 k(ζ,z)k, (2.16)
for all (ζ,z)∈HBF. In turn, we recall from [8, eq. (3.33)] the following inf-sup condition sup
06=(ηj,ψj)∈HD
aj(χj,ηj) +b(ηj, ϕj) +b(χj, ψj) +cj(u;ϕj,ηj) k(ηj, ψj)k ≥ γj
2 k(χj, ϕj)k, (2.17)
for all (χj, ϕj) ∈ HD := H(div4/3; Ω)×L4(Ω). Further details yielding the solvability of (2.7) were developed in [8, Theorem 3.9]. In particular, we recall for later use the following a prioriestimates
k(σ,u)k ≤ cT
n
kuDk0,Γ+kuDk1/2,Γ+kgk0,4;Ω kφDk1/2,Γ+kφrk0,4;Ωo
(2.18)
and X2
j=1
k(ρj, φj)k ≤ c
eSkφDk1/2,Γ, (2.19)
where cT := cS max
1, cSe , and cS and c
Se are positive constants defined in [8, eqns. (3.21) and (3.29)].
2.3 The fully-mixed finite element method
We denote byTh a regular partition of Ω made up of trianglesT (whend= 2) or tetrahedralT (when d= 3) of diameter hT, and meshsize h := max
hT : T ∈ Th . In addition, for each T ∈ Th, we let RTk(T) be the local Raviart–Thomas space of orderk≥0, i.e.,
RTk(T) := Pk(T)⊕Pk(T)x,
where Pk(T) is the space of polynomials defined on T of degree ≤ k, Pk(T) stands for its vector version (as indicated in Section 1.1), and x:= (x1, . . . , xd)t is a generic vector of Rd. Next, we recall from [8, Section 4.3] the finite element spaces
Hσh := n
τh∈H0(div; Ω) : ctτh|T ∈RTk(T) ∀c∈Rd, ∀T ∈ Tho , Huh := n
vh ∈C(Ω) : vh|T ∈Pk+1(T) ∀T ∈ Tho , Hρh := n
ηh ∈H(div4/3; Ω) : ηh|T ∈RTk(T) ∀T ∈ Tho , Hφh := n
ψh∈L4(Ω) : ψh|T ∈Pk(T) ∀T ∈ Tho ,
(2.20)
and set φh := (φ1,h, φ2,h) ∈Hφh := Hφh×Hφh. Then the Galerkin scheme associated with (2.7) reads:
Find (σh,uh)∈Hσh ×Huh and (ρj,h, φj,h)∈Hρh×Hφh,j∈ {1,2}, such that
A((σh,uh),(τh,vh)) +Buh((σh,uh),(τh,vh)) = FD(τh,vh) +Fφh(τh,vh), aj(ρj,h,ηj,h) +b(ηj,h, φj,h) +cj(uh;φj,h,ηj,h) = Gj(ηj,h),
b(ρj,h, ψj,h) = 0,
(2.21)
for all (τh,vh) ∈ Hσh ×Huh and (ηj,h, ψj,h) ∈ Hρh ×Hφh. The solvability analysis and a priori error bounds for (2.21) are established in [8, Theorems 4.7, 5.4 and 5.6]. In particular, we recall thea priori estimates
k(σh,uh)k ≤ cTh n
kuDk0,Γ+kuDk1/2,Γ+kgk0,4;Ω kφDk1/2,Γ+kφrk0,4;Ωo
(2.22)
and X2
j=1
k(ρj,h, φj,h)k ≤ c
SehkφDk1/2,Γ, (2.23)
where cTh := cS max
1, cSeh and c
Seh is a positive constant, independent of h, defined in [8, eq.
(4.15)].
3 Preliminaries for the a posteriori error analysis
We start by introducing a few useful notations for describing local information on elements and edges or faces depending on wether d= 2 ord= 3, respectively. Let Eh be the set of edges or faces of Th, whose corresponding diameters are denoted byhe, and define
Eh(Ω) :=
e∈ Eh : e⊆Ω and Eh(Γ) :=
e∈ Eh : e⊆Γ . For each T ∈ Th,we let Eh,T be the set of edges or faces of T, and denote
Eh,T(Ω) =
e⊆∂T : e∈ Eh(Ω) and Eh,T(Γ) =
e⊆∂T : e∈ Eh(Γ) . We also define the unit normal vector ne on each edge or face by
ne := (n1, . . . , nd)t ∀e∈ Eh. Hence, when d= 2 we can define the tangential vector se by
se := (−n2, n1)t ∀e∈ Eh.
However, when no confusion arises, we will simply write n and s instead ofne and se, respectively.
The usual jump operator [[·]] across internal edges or faces is defined for piecewise continuous matrix, vector, or scalar-valued functions ζ, by
[[ζ]] = (ζ
T+)
e − (ζ
T−)
e with e = ∂T+∩∂T−,
where T+ and T− are the elements ofTh having e as a common edge or face. Finally, for sufficiently smooth scalar ψ, vectorv:= (v1, . . . , vd)t, and tensor fieldsτ := (τij)i,j=1,d, we let
curl(ψ) :=
− ∂ψ
∂x2 , ∂ψ
∂x1 t
, curl(v) :=
curl(v1)t curl(v2)t
ford= 2,
curl(v) :=
∂v2
∂x1 − ∂v1
∂x2 , ford= 2,
∇ ×v , ford= 3,
curl(τ) =
curl(τ1) curl(τ2)
, ford= 2,
curl(τ1) curl(τ2) curl(τ3)
, ford= 3,
γ∗(v) =
v·s , ford= 2, v×n , ford= 3,
and γ∗(τ) =
τs , ford= 2,
τ1×n τ2×n τ3×n
, ford= 3, where τi is the i-th row of τ and the derivatives involved are taken in the distributional sense.
Now, let Πkh :H1(Ω) → Hρh (cf. (2.20)) be the Raviart–Thomas interpolation operator, which is characterized by the following identities
Z
e
(Πkh(v)·n)q = Z
e
(v·n)q ∀edge/facee∈ Eh, ∀q ∈Pk(e) whenk≥0, (3.1)
and Z
T
Πkh(v)·q = Z
T
v·q ∀T ∈ Th, ∀q∈Pk−1(K) when k≥1, (3.2)
for all v∈H1(Ω). As a consequence of (3.1) and (3.2), it is easy to show that (see [20, Lemma 3.7]) div(Πkh(v)) =Phk(div(v)),
where Phk is the L2(Ω)-orthogonal projector onto the picewise polynomials of degree ≤ k on Ω. A tensor version of Πkh, say Πkh : H1(Ω) → Hσh, which is defined row-wise by Πkh, and a vector version of Phk, say Pkh, which is the L2(Ω)-orthogonal projector onto the piecewise polynomial vectors of degree ≤k, might also be required. The local approximation properties of Πkh (and hence of Πkh) are established in what follows. For the corresponding proofs we refer to [20, Lemma 3.16] and [4, Lemma 4.2] (see also [3]).
Lemma 3.1 Let p >1. Then, there exist positive constantsc1,c2, independent of h, such that for all v∈H1(Ω) there hold
kv−Πkh(v)k0,T ≤ c1hT kvk1,T ∀T ∈ Th, and
kv·n−Πkh(v)·nk0,p;e ≤ c2h1−1/pe kvk1,p;Te ∀e∈ Eh, where Te is a triangle of Th containing the edge eon its boundary.
In turn, letIh: H1(Ω)→H1h(Ω) be the Cl´ement interpolation operator, where H1h(Ω) :=n
v∈ C(Ω) : v|T ∈P1(T) ∀T ∈ Tho .
The local approximation properties of this operator are established in the following lemma (see [12]).
Lemma 3.2 There exist positive constants c3,c4, independent of h, such that for allv ∈H1(Ω)there holds
kv−Ih(v)k0,T ≤ c3hT kvk1,∆(T) ∀T ∈ Th, and
kv−Ih(v)k0,e ≤ c4h1/2e kvk1,∆(e) ∀e∈ Eh, where
∆(T) :=∪n
T0 ∈ Th : T0∩T 6=∅o
and ∆(e) :=∪n
T0 ∈ Th: T0∩e6=∅o .
In what follows, a vector version of Ih, say Ih :H1(Ω)→H1h(Ω), which is defined component-wise by Ih, will be needed as well. For the forthcoming analysis we will also utilize a couple of results providing stable Helmholtz decompositions for H0(div; Ω) and H(divp; Ω) (cf. (1.1), (1.2)). More precisely, we have the following lemmas.
Lemma 3.3 For each τ ∈H(div; Ω) there exist
a) z∈H2(Ω) and χ∈H1(Ω) such thatτ =∇z+curl(χ) when d= 2, b) z∈H2(Ω) and χ∈H1(Ω) such thatτ =∇z+curl(χ) when d= 3.
In addition, in both cases,
kzk2;Ω+kχk1,Ω ≤ CHelkτkdiv;Ω,
where CHel is a positive constant independent of all the foregoing variables.
Proof. For the proof ofa) andb) we refer to [28, Lemma 3.7] and [21, Theorem 3.1], respectively. We
omit further details.
Lemma 3.4 Let 1< p≤2 when d= 2 and 6/5≤p≤2 when d= 3. Then, for eachη∈H(divp; Ω) there exist
a) ξ ∈W1,p(Ω)and w∈H1(Ω)such that η=ξ+ curl(w) when d= 2, b) ξ ∈W1,p(Ω)and w∈H1(Ω)such that η=ξ+ curl(w) whend= 3.
In addition, we have that
kξk1,p;Ω+kwk1,Ω ≤ CHelkηkdivp;Ω and kξk1,p;Ω+kwk1,Ω ≤ CHelkηkdivp;Ω,
for d= 2 and d= 3, respectively, where CHel is a positive constant independent of all the foregoing variables.
Proof. See [4, Lemma 4.4].
4 First residual-based a posteriori error estimator
In this section we derive a reliable and efficient residual based a posteriori error estimator for the Galerkin scheme (2.21). To this end, in what follows we assume the hypotheses from [8, Theorems 3.9 and 4.7], which guarantee the existence of unique solutions (σ,u,ρj, φj) ∈H0(div; Ω)×H1(Ω)× H(div4/3; Ω)×L4(Ω) and (σh,uh,ρj,h, φj,h) ∈Hσh ×Huh×Hρh×Hφh,j∈ {1,2}of the continuous and discrete problems (2.7) and (2.21), respectively. Then, the first global a posteriori error estimator is defined by:
Θ1 :=
X
T∈Th
Θ2BF,T + X2 j=1
Θ2D,j,T
!
1/2
+
X
T∈Th
X2 j=1
kdiv(ρj,h)k4/30,4/3;T
3/4
, (4.1)
where, for each T ∈ Th, the local error indicators Θ2BF,T and Θ2D,j,T are defined as follows:
Θ2BF,T := f(φh) +div(σh)−K−1uh−F|uh|uh2
0,T + ∇uh− 1 ν σdh
2
0,T
+h2T curl
1 ν σdh
2
0,T
+ X
e∈Eh,T(Ω)
he
γ∗
1
ν σdh
2
0,e
+ X
e∈Eh,T(Γ)
kuD−uhk20,e + X
e∈Eh,T(Γ)
he
γ∗
1
νσdh− ∇uD
2
0,e
(4.2)
and
Θ2D,j,T :=h2−d/2T
∇φj,h−Q−1j ρj,h+Rjφj,huh2
0,T +h2T curl
Q−1j ρj,h+Rjφj,huh2
0,T
+ X
e∈Eh,T(Ω)
he hh
γ∗
Q−1j ρj,h+Rjφj,huhii2
0,e + X
e∈Eh,T(Γ)
h1/2e kφj,D−φj,hk20,4;e
+ X
e∈Eh,T(Γ)
he γ∗
Q−1j ρj,h+Rjφj,huh
− ∇φj,D2
0,e .
(4.3)
Notice that the last term of Θ2BF,T requires γ∗(∇uD)
e ∈ L2(e) for all e∈ Eh(Γ), which is overcome below (cf. Lemma 4.4) by simply assuming that uD∈H1(Γ). Similarly, the last two terms of Θ2D,j,T are well defined if we assume that φj,D∈H1(Γ)∩L4(Γ) for eachj∈ {1,2}.
The main goal of the present section is to establish, under suitable assumptions, the existence of positive constants Ceff and Crel, independent of the meshsizes and the continuous and discrete solutions, such that
CeffΘ1+ h.o.t. ≤ k(σ,u)−(σh,uh)k+ X2 j=1
k(ρj, φj)−(ρj,h, φj,h)k ≤ CrelΘ1, (4.4) where h.o.t. is a generic expression denoting one or several terms of higher order. The upper and lower bounds in (4.4), which are known as the reliability and efficiency of Θ1, are derived below in Sections 4.1 and 4.2, respectively.
4.1 Reliability of the a posteriori error estimator The main result of this section is stated in the following theorem.
Theorem 4.1 Assume that the data uD,φD and φr satisfy cTh
r0 n
kuDk0,Γ+kuDk1/2,Γ+kgk0,4;Ω 2kφDk1/2,Γ+kφrk0,4;Ωo
≤ 1
2, (4.5)
with r0 := min{r1, r2}, and r1, r2 are defined in (2.15). Then, there exists a positive constant Crel, independent of h, such that
k(σ,u)−(σh,uh)k+ X2 j=1
k(ρj, φj)−(ρj,h, φj,h)k ≤ CrelΘ1. (4.6) We begin the derivation of (4.6) with a preliminary lemma, for which we first recall that
HBF:=H0(div; Ω)×H1(Ω) and HD :=H(div4/3; Ω)×L4(Ω).
Lemma 4.2 Assume that the datauD,φDandφr satisfy (4.5). Then, there exists a positive constant C, independent of h, such that
k(σ,u)−(σh,uh)k+ X2 j=1
k(ρj, φj)−(ρj,h, φj,h)k
≤ C sup
06=(τ,v)∈HBF
|RBF(τ,v)|
k(τ,v)k + X2 j=1
sup
06=(ηj,ψj)∈HD
|RDj(ηj, ψj)|
k(ηj, ψj)k
! ,
(4.7)
where RBF:HBF→R and RDj :HD →R are the residual functionals given by
RBF(τ,v) =FD(τ,v) +Fφh(τ,v)−A((σh,uh),(τ,v))−Buh((σh,uh),(τ,v)) for all (τ,v)∈HBF, and
RDj(ηj, ψj) =Gj(ηj)−aj(ρj,h,ηj)−b(ηj, φj,h)−b(ρj,h, ψj)−cj(uh;φj,h,ηj) for all (ηj, ψj)∈HD.
Proof. First, applying the inf-sup condition (2.16) to the error (ζ,z) = (σ−σh,u−uh), adding and substractingBuh((σh,uh),(τ,v)) andFφh(τ,v), and using the first equation of (2.7), we deduce that
αA
2 k(σ−σh,u−uh)k ≤ sup
06=(τ,v)∈HBF
RBF(τ,v) k(τ,v)k
+ sup
06=(τ,v)∈HBF
Bu−uh((σh,uh),(τ,v))
k(τ,v)k + sup
06=(τ,v)∈HBF
Fφ−φ
h(τ,v) k(τ,v)k .
(4.8)
In turn, the continuities of Bw (cf. (2.9)) and Fϕ (cf. (2.12)) establish (cf. [8, eqns. (3.4), (3.9)]) Bu−uh((σh,uh),(τ,v))≤FkKk∞ki4k2kuhk1,Ωku−uhk1,Ωkτkdiv;Ω,
Fφ−φ
h(τ,v)≤ kKk∞kgk0,4;Ωkφ−φhk0,4;Ωkτkdiv;Ω, which, replaced back into (4.8), yields
k(σ−σh,u−uh)k
≤ 2
αA sup
06=(τ,v)∈HBF
RBF(τ,v) k(τ,v)k + 1
r1kuhk1,Ωku−uhk1,Ω+CSkgk0,4;Ωkφ−φhk0,4;Ω,
(4.9)
whereCS := 2kKk∞/αA(cf. [8, eq. (3.40)]) andr1is defined in (2.15). Similarly, applying the inf-sup condition (2.17) to (χj, ϕj) = (ρj −ρj,h, φj−φj,h), making use of the second and third equations of (2.7), adding and substracting cj(uh;φj,h,ηj), and using the continuity of cj, which states that (cf.
[8, eq. (3.7)]) cj(w;ψ,η) ≤ RjkQ−1j k ki4k kwk1,Ωkψk0,4;Ωkηkdiv4/3;Ω, we deduce that
γj
2 k(ρj−ρj,h, φj−φj,h)k ≤ sup
06=(ηj,ψj)∈HD
RDj(ηj, ψj)
k(ηj, ψj)k + sup
06=(ηj,ψj)∈HD
cj(u−uh;φj,h,ηj) kηjkdiv4/3;Ω
≤ sup
06=(ηj,ψj)∈HD
RDj(ηj, ψj)
k(ηj, ψj)k +RjkQ−1j k ki4k kφj,hk0,4;Ωku−uhk1,Ω.
Thus, summing up over j ∈ {1,2}, recalling the definition of r2 in (2.15) and using (2.23) to bound kφhk0,4;Ω :=kφ1,hk0,4;Ω+kφ2,hk0,4;Ω, we obtain
X2 j=1
k(ρj −ρj,h, φj−φj,h)k ≤ X2 j=1
2
γj sup
06=(ηj,ψj)∈HD
RDj(ηj, ψj) k(ηj, ψj)k +ceS
h
r2 kφDk1/2,Γku−uhk1,Ω, (4.10) withc
eSh >0 defined in [8, eq. (4.15)]. Then, using the estimate (4.10) to bound the last term in (4.9), recalling the definition of r0 in (2.15), using (2.22) to bound kuhk1,Ω, and recalling thatCS and c
eSh, as well as 1/r1 and 1/r2, are bounded by cTh and 1/r0 (cf. [8, eq. (3.43)]), respectively, we deduce that
k(σ−σh,u−uh)k
≤ C1 sup
06=(τ,v)∈HBF
|RBF(τ,v)|
k(τ,v)k + C2
X2 j=1
sup
06=(ηj,ψj)∈HD
|RDj(ηj, ψj)|
k(ηj, ψj)k +cTh
r0 n
kuDk0,Γ+kuDk1/2,Γ+kgk0,4;Ω 2kφDk1/2,Γ+kφrk0,4;Ωo
ku−uhk1,Ω,
(4.11)
with C1, C2 >0, independent of h. Thus, according to the assumption (4.5), (4.11) yields k(σ−σh,u−uh)k ≤ Cb1 sup
06=(τ,v)∈HBF
|RBF(τ,v)|
k(τ,v)k + Cb2
X2 j=1
sup
06=(ηj,ψj)∈HD
|RDj(ηj, ψj)|
k(ηj, ψj)k , (4.12) withCb1,Cb2 >0, independent ofh. Next, using (4.12) to bound the last term in (4.10), we easily find that
X2 j=1
k(ρj −ρj,h, φj−φj,h)k ≤ Cb3 sup
06=(τ,v)∈HBF
|RBF(τ,v)|
k(τ,v)k + Cb4 X2 j=1
sup
06=(ηj,ψj)∈HD
|RDj(ηj, ψj)|
k(ηj, ψj)k , (4.13) with Cb3,Cb4 >0, independent of h. In this way, estimate (4.7) follows from (4.12) and (4.13).
We now aim to bound the suprema in (4.7). Indeed, in virtue of the definitions of the forms A, Bw, aj, b and cj (cf. (2.8)–(2.11)), we find that, for any (τ,v) ∈ H0(div; Ω) ×H1(Ω) and (ηj, ψj)∈H(div4/3; Ω)×L4(Ω),j ∈ {1,2}, there holds
RBF(τ,v) =RBF1 (τ) +RBF2 (v) and RDj(ηj, ψj) =RDj,1(ηj) +RDj,2(ψj), where
RBF1 (τ) = hτn,uDiΓ− 1 ν
Z
Ω
σdh:τd− Z
Ω
uh·div(τ)
− Z
Ω
K f(φh) +div(σh)−K−1uh−F|uh|uh
·div(τ),
(4.14)
RBF2 (v) = κ2
Z
Γ
(uD−uh)·v−κ1
Z
Ω
∇uh−1 νσdh
:∇v, (4.15)
RDj,1(ηj) =
ηj·n, φj,D
Γ− Z
Ω
Q−1j ρj,h+Rjφj,huh
·ηj − Z
Ω
φj,hdiv(ηj), (4.16) and
RDj,2(ψj) = − Z
Ω
ψjdiv(ρj,h). (4.17)
Notice that for convenience of the subsequent analysis we have added and subtracted the term given by R
Ωuh·div(τ) in (4.14). Then, the supremum in (4.7) can be bounded in terms of RBF1 ,RBF2 ,RDj,1, and RDj,2 as follows
k(σ,u)−(σh,uh)k+ X2 j=1
k(ρj, φj)−(ρj,h, φj,h)k
≤ C n
kRBF1 kH0(div;Ω)0 +kRBF2 kH1(Ω)0 + X2 j=1
kRDj,1kH(div
4/3;Ω)0+kRDj,2kL4(Ω)0
o ,
(4.18)
and hence our next purpose is to derive suitable upper bounds for each one of the terms on the right hand side of (4.18). We begin by establishing the corresponding estimates for RBF2 and RDj,2 (cf.
(4.15) and (4.17)), which follow from a straightforward application of the Cauchy–Schwarz and H¨older inequalities.
Lemma 4.3 There exist positive constants C1, C2, independent of h, such that
kRBF2 kH1(Ω)0 ≤ C1
X
T∈Th
∇uh− 1 νσdh
2
0,T + X
e∈Eh,T(Γ)
kuD−uhk20,e
!
1/2
and
X2 j=1
kRDj,2kL4(Ω)0 ≤ C2
X
T∈Th
X2 j=1
kdiv(ρj,h)k4/30,4/3;T
3/4
.
We now bound the termkRBF1 kH0(div;Ω)0. To this end, we first observe that integrating by parts the expression R
Ωuh·div(τ) in (4.14), the functional RBF1 can be rewritten as follows RBF1 (τ) =hτn,uD−uhiΓ+
Z
Ω
∇uh− 1 ν σdh
:τ
− Z
Ω
K f(φh) +div(σh)−K−1uh−F|uh|uh
·div(τ).
(4.19)
For simplicity, we prove the aforementioned result for the two-dimensional case. The three dimensional one proceeds analogously. Givenτ ∈H0(div; Ω), it follows from Lemma 3.3 that there existz∈H2(Ω) and χ∈H1(Ω), such that τ =∇z+curl(χ) in Ω, and
kzk2,Ω+kχk1,Ω ≤ CHelkτkdiv;Ω. (4.20) Then, we set τh := Πkh(∇z) +curl(Ih(χ)) +c0I, wherec0 ∈ R is chosen so that R
Ωtr(τh) = 0. In addition, bearing in mind the definition of RBF1 (cf. (4.14)), and employing the first equation of the Galerkin scheme (2.21) and the compatibility condition (2.2), we deduce that RBF1 (τh) = 0, whence
RBF1 (τ) = RBF1 (τ−τh) = RBF1 (∇z−Πkh(∇z)) +RBF1 (curl(χ−Ih(χ))). (4.21) The following lemma establishes the estimate for RBF1 .
Lemma 4.4 Assume that uD ∈H1(Γ). Then, there exists a positive constant C, independent of h, such that
kRBF1 kH0(div;Ω)0 ≤ C ( X
T∈Th
Θ2BF,T )1/2
, where
Θ2BF,T := f(φh) +div(σh)−K−1uh−F|uh|uh2
0,T + h2T
∇uh− 1 ν σdh
20,T +h2T
curl
1 ν σdh
2
0,T
+ X
e∈Eh,T(Ω)
he
γ∗
1
ν σdh
2
0,e
+ X
e∈Eh,T(Γ)
he
γ∗
1
ν σdh− ∇uD
2
0,e
+ X
e∈Eh,T(Γ)
hekuD−uhk20,e.
(4.22)