Job scheduling is a challenging problem that has attracted the interest of researchers in artificial intelligence and metaheuristics in recent decades. In this project, we face the workshop scheduling problem with an additional resource type (operators). First, we introduce a change to the schedule generation scheme to control the idle time of the machines.
To evaluate the proposed strategies, we have conducted an experimental study on a benchmark derived from a set of hard cases of the classic job shop problem.
INTRODUCTION
OBJECTIVES
THE JOB SHOP SCHEDULING PROBLEM WITH OPERATORS
P ROBLEM FORMULATION
A DISJUNCTIVE GRAPH MODEL
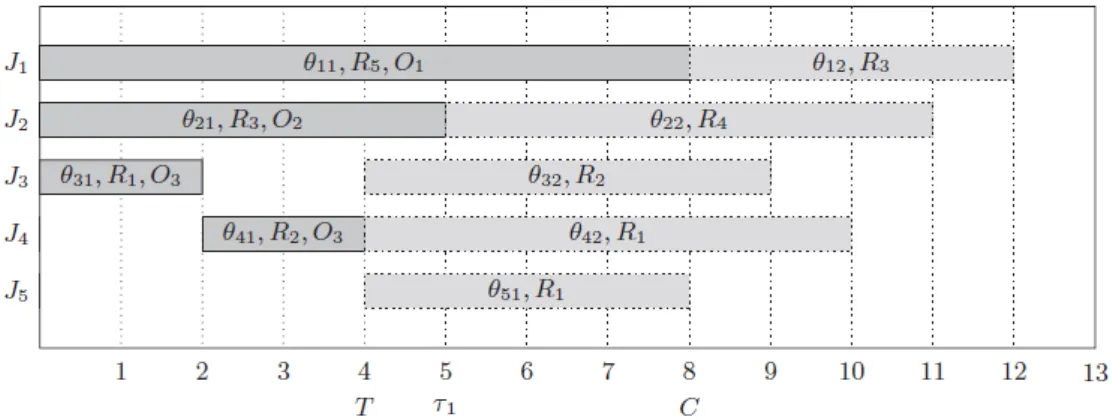
Analogously, the total flow time is calculated as the sum of the longest cost paths in To simplify the picture, only disjunctive and operator arcs between successive operations in a machine or an operator are shown, respectively. The tail L is defined such that the value L + is the cost of the longest path from to 7 8 .
A partial schema is given by a subgraph of ( where some disjunctive and operator arcs are not yet fixed.
GENETIC ALGORITHM FOR THE ( , )
HYBRID OG&T
E XTENDING THE & ALGORITHM
Active schemes are a subset of the feasible schemes that contain at least one optimal solution. Depending on the value of the delta parameter, the considered search space would therefore be different. If delta is 1, the interval of the release times of the considered operations does not change, which means that the search space is the same.
The largest reduction of the search space is achieved with delta = 0, where no idle times are allowed for the machines.
NEIGHBORHOOD STRUCTURES FOR THE JSO
N EIGHBORHOOD STRUCTURE FOR ( )
A DAPTATION OF FOR ( , )
- Types of arcs
- Important concepts
- Definition of neighborhood structures
- Makespan estimation
Note that machine critical block arcs are O or O type and operator critical block arcs are , O or . If ( , ?) is of type , it is not inside the critical block of the operator. If ( , ?) is of type O, it is not inside the critical block of the operator, but inside the critical block of the machine.
If ( , ?) is of type O, it is not in the interior of a machine-critical block. If ( , ?) is of type O , it is not in the interior of a machine's critical block, and it is in the interior of an operator's critical block. First, the neighboring structure ŒJ, it can be divided into one structure for the arcs of type , and the other for the arcs of type O that it contains.
Then the neighborhood structure ŒK can be split into one structure for the O-type arcs and another structure for the O-type arcs it contains. Note that type arcs can also be typed, but let's imagine that they are typed. Œ would generate 2 adjacent solutions by reversing the 2 arcs of type O. ŒJ would generate 2 adjacent solutions by reversing the arc of type O and the arc of type . ŒK would generate 2 adjacent solutions by reversing an O-type arc and an O-type arc. Œ] would generate 6 adjacent solutions by reversing 4 O-type arcs, 1 O-type arc, and 1 O-type arc.
Remember that the font arcs are represented as black continuous arrows, the font arcs. O is represented as blue discontinuous arrows and the type arcs are represented as red dotted arrows.
E XAMPLE
Based on a critical path of the plan, the proposed neighborhood structure first calculates the critical blocks. However, there is only one that contains more than one operation and thus is the only one interesting for neighbor generation. However, there is only one that contains more than one operation, so it is the only one of interest for neighbor generation.
As already explained, Œ generates contiguous turning arcs that are on the boundary of the machine's critical blocks and on the boundary of the operator's critical blocks (with the exception of the first arc of the first block and the last arc of the last block in the case that these blocks have more than 2 operations). ŒJ generates adjacent turning arcs that are on the boundary of the operator's critical block and are not on the boundary of the machine's critical block (with the exception of the first arc of the first block and the last arc of the last block in the case where these blocks have more than 2 operations). ŒK generates adjacent turning arcs that are on the boundary of the machine's critical block and are not on the boundary of the operator's critical block (with the exception of the first arc of the first block and the last arc of the last block in the case where these blocks have more than 2 operations).
The neighbor structure ŒJ would generate no neighbor because the arc it has is (J, JJ), but it is of type so it cannot be reversed. Therefore, to generate a neighbor schedule, we only need to exchange the order of the operations ( yJ is processed before J. If this value were greater than or equal to the actual make of the current solution, the neighbor would be discarded, since it is not an improve the schedule.
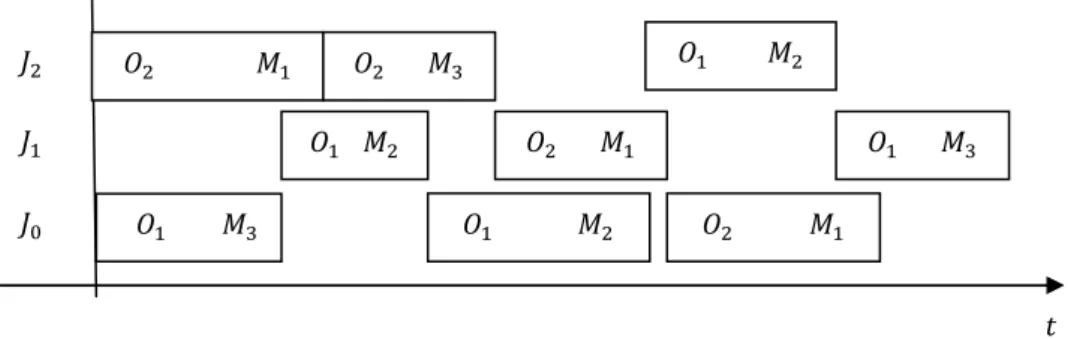
As before, the diagram shows only the operations that connect adjacent arcs and the critical path is marked with thick arcs. In this example, there is only one adjacent schedule with a makespan lower than that of the original schedule. The local search algorithm repeats the process from the new scheme until there are no improvements or another criterion is met.
MEMETIC ALGORITHM FOR THE JSO
EXPERIMENTAL STUDY
H YBRID OG&T ALGORITHM FOR TOTAL FLOW TIME MINIMIZATION
The Hybrid OG&T algorithm was used as the decoding method in the genetic algorithm presented in [Mencía et al. For the evaluation of the effect of the Hybrid OG&T algorithm on the performance of the genetic algorithm we considered 5 different values for the delta parameter and 1. Results from the genetic algorithm using the Hybrid OG&T with different delta values.
As we can see, as long as the problem instances become larger, a smaller value of delta, which achieves more search space reduction, is the best option. For small instances of size 20x5, the genetic algorithm achieves the best results with a delta value of 1, and we can see that the lower the delta, the worse the results the GA achieves. This is quite reasonable, since for small cases, a large reduction of the search space may miss good solutions and may cause the genetic algorithm to converge prematurely.
At the same time, for large cases, a large search space can be difficult to explore, so reducing it seems worthwhile. Another interesting result that we can observe from this experiment refers to the stability of the algorithm depending on the delta value. As we can see in Figure 34, which shows the average Pearson coefficient of variation for cases of the same size, the lower the delta, the more stable the algorithm.
Finally, with regard to the required calculation time, we did not observe any significant differences between the different values of the delta considered.

M EMETIC ALGORITHMS FOR MAKESPAN MINIMIZATION
- Evaluation of the Neighborhood Structures
- Comparison among GA and the different MAs
- MAs applying local search to all the population
- MAs applying local search with a probability of 0,2
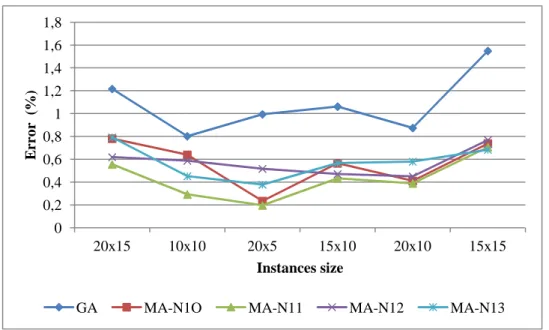
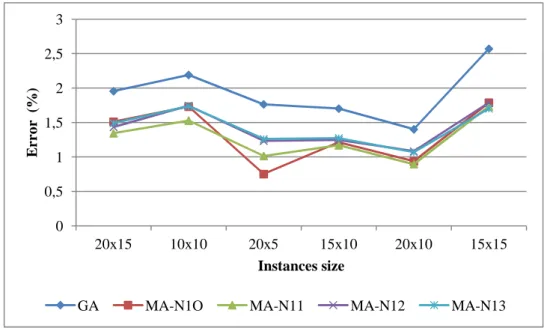
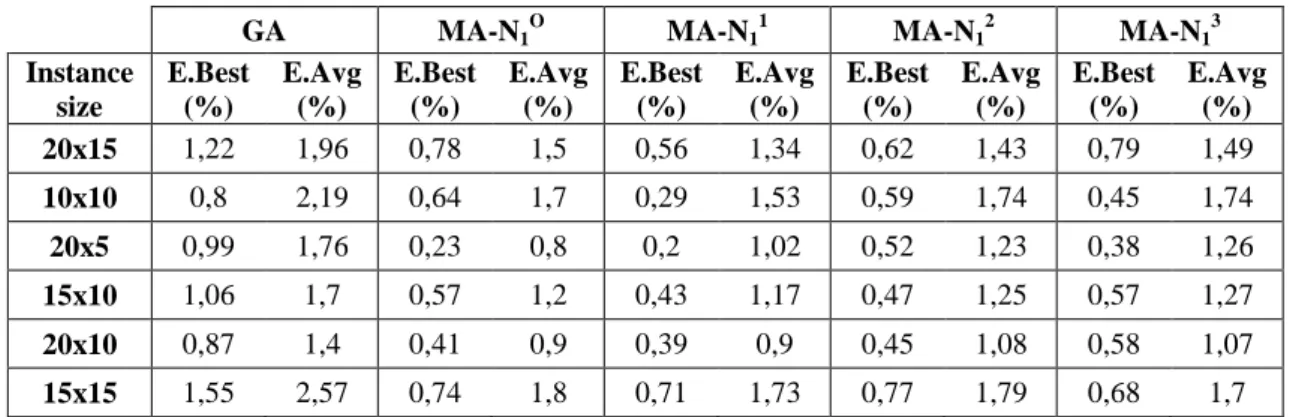
Aiming to evaluate the effectiveness of the methods proposed in this project for the JSO(n,p) makespan minimization problem, we did several experiments with the GA and the four MAs. Error in the best solution reached for GA and MAs (instances of the same size). Error in the average solution reached for GA and MAs (instances of the same size).
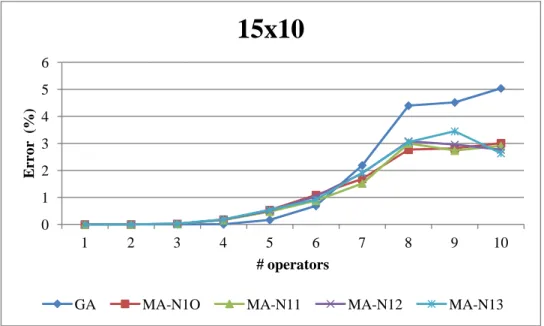
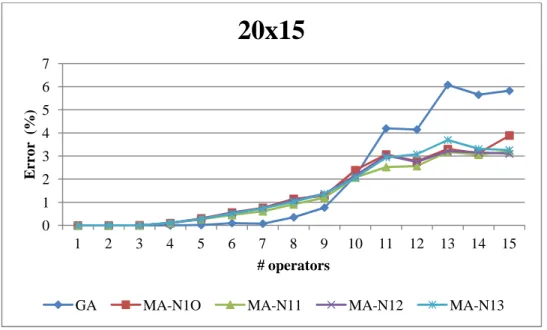
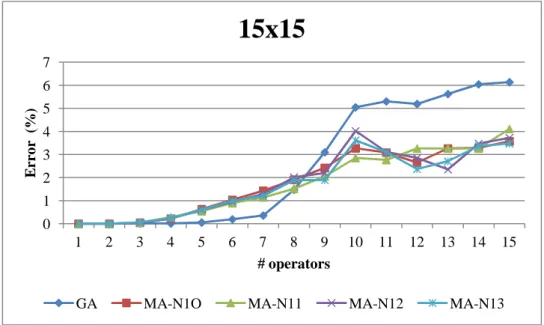
We can observe that the GA achieves the worst results, both for the best solutions and the averages returned, on all subsets of instances of the same size. Figures 38-43 show for each set of instances of the same size, the percentage error of the average cost of the solutions, averaged over the instances with the same number of operators available. On the other hand, for intermediate values of the number of operators, the GA outperforms the memetic algorithms, and when there are many operators available, the memetic algorithms give the best results, especially MA-N11 and MA-N1O.
The development of this part of the experimental study followed the same steps as in the previous part. Error of the best solution achieved for GA and MA (instances of the same size) 0. GA achieves the worst results on all subsets of instances of the same size.
Figures 46-51 show for each group of instances of the same size the error in percentage of the average cost of the solutions, averaged for instances with the same number of available operators. For the large instances with sizes 15x10, 20x10, 15x15 and 20x15, the GA is always worse than the MAs, except for the instances with few available operators, for which the same results are obtained.
CONCLUSIONS AND FUTURE WORK
C ONCLUSIONS
F UTURE WORK
Local search and genetic algorithm for the job shop scheduling problem with sequence-dependent setup time. In this appendix we first report, for each case, the cost of the best solution found throughout the experimental study, both for production duration and total flow time. Comparison between MAs and GAs with the same computation time and 20% Local Search.
Comparison between MA and GA with the same computation time and 20% local search (20x15). Comparison between MA and GA with the same computation time and 20% local search (10x10). Comparison between MA and GA with the same computation time and 20% local search (20x5).
Comparison between MAs and GAs with the same computation time and 20% Local Search (15x10). Comparison between MAs and GAs with the same computation time and 20% Local Search (20x10).