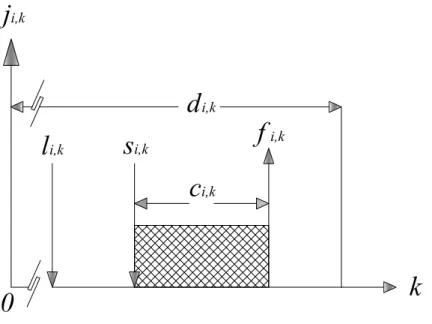
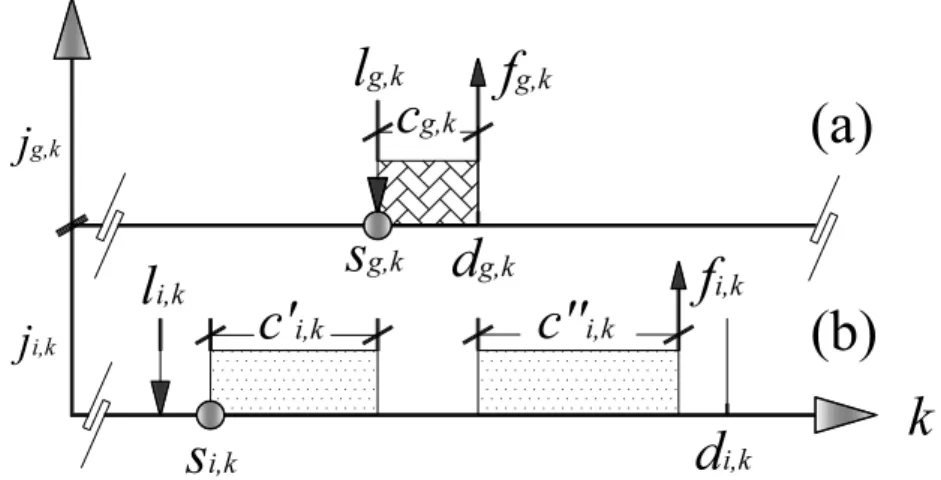
Section3 presents the real-time simulation of the quadrotor performed in ECS Raspberry Pi 2 model B+, so the real-time response analysis is also shown. Execution time ci,k: it is the time at which a real-time task's instance performs its operations without taking into account its offsets in the processor. The time constraints for an instance of a real-time task have the graphical interpretation that can be seen in Figure 3.
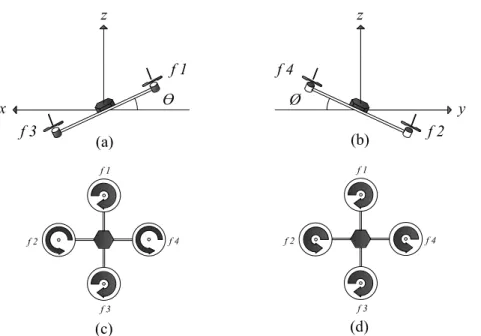
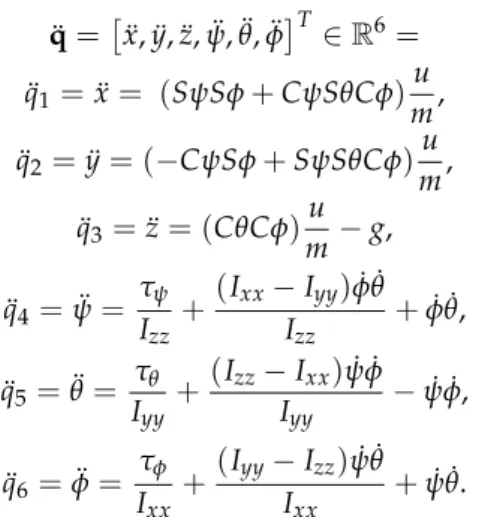
Therefore, for a real-time simulation of the mathematical model of the drone, the parameters shown in Table 1 are used. To perform the real-time simulation of the quadrature, the model described by (51) and (52) is reformulated in terms of the coordinates of generalized specified by (5), considering that (54) is an alternative representation of the dynamic drone model. . In Figure 5, the angular velocities φ,θ,ψ obtained in the real-time simulation of the quadrature can be seen.
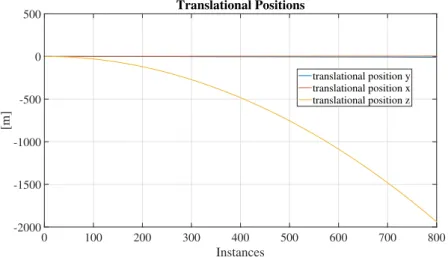
Figure 6 shows the angular positionsφ,θ,ψobtained in the real-time simulation of the quadrotor. Figure 9 shows the translational positions x and y obtained in the real-time simulation of the quadrotor. Consequently, for each of the instancesj1,k of the real-time task, the time constraint described by the following Expression (57) is considered.
This implies that all the execution timesci,k (and their first probability moments) are less than the deadline imposed for the execution of the real-time task.
Temporary Computational Complexity
In this sense, when a physical process is simulated using an algorithm programmed in an embedded digital computer, the analysis of the execution timesci and the fulfillment of the time constraint justifies that the process simulation works in real time. According to Figure 13, it is necessary to show that any algorithm whose temporal complexity is linear (T(n) =n), constant(T(n) =1) or polynomial(T(n) =nx∀x6= n ∧x∈R), is known as a (P)complexity or polynomial time algorithm. Unlike the previous algorithms, algorithms whose temporal complexity is of the non-polynomial (T(n) = nn) type, also known as non-polynomial (NP) or of non-polynomial time, are hardly implemented using a real-time system, because they require too many computer system processor resources and are therefore considered to have potentially exponential complexity (T(n) =2n).
Function g(n) represents the first probability moment of the random behavior of execution times ci,k. Function gDCI(n) is any lower bound for any function T(n) (and therefore also for execution times ci,k) and is defined by the following expression:. 70) Based on the analysis of (68) and (70), it is feasible to determine that they can be used to dimension the hardware characteristics of the embedded system on which the physical process simulation is performed. As shown in Figure 15, the use of the minimum priority in the execution of the algorithm that performs the quadrotor simulation has a direct influence on the measured execution times.
Based on the analysis of eGCS,T(n) in Figure 15 and considering the random behavior of T(n), it can be concluded that this difference will emphasize the non-deterministic effect of the temporary computational complexity. The magnitude of the difference reported in (72) (which can be seen in Figure 15) can be reduced when performing the quadrotor simulation by using alternative priorities when performing the RTT. As a result, the experimentation shown in Figures 16–19 indicates a possible dependency between the behavior of runtimes and priorities.
In this context, the fulfillment of the condition indicated by (68) also prevails for Figures 18 and 19. Then, as can be seen from this manuscript, one of the contributions presented is that the achievement of this temporal constraint can be studied in terms of the temporal computational complexity T(n) and its interaction with the functionsgD(n) engDCS(n). One of the direct applications of the theory developed in this study could be the categorization of real-time systems based on the computational complexity analysis of algorithms implemented using an RTS.
Classification of the computational temporal complexity of an algorithm based on the analysis of the behavior of T(n). This implies that the growth rate of the function T(n) increases, resulting in larger execution times cei,k leading to Table 2. Therefore, one of the advantages of determining the computational time complexity of an algorithm is that it can predict how the time requirement will increase when performed on the computer system.
Then, as can only be seen from Figures 15 and 17-19 and by realizing the Expression (68), it can be concluded that functionsgD(n) represent upper bounds for functionsT(n); this fact can confirm the expression (71). Moreover, based on the analysis of (75), it is also found that the complexityT(n) of the real-time simulations reported in this paper can be described by the asymptotic notation: bigO.
Discussion
Given the definition of the function g(n) denoted by (61) and on which the analysis presented in this article is based, it may be assumed that it is somewhat contradictory that computing these functions as n increases will, of course, have temporary computational complexity of linear type. This fact represents a discrepancy with the conclusion in which the temporal complexity of an algorithm performing a real-time simulation is of a constant type. However, it is important to emphasize that, as shown in Appendix B of this article, the function g(n) can be expressed recursively and iteratively, allowing such a function to be computed in any case of the real-time task performed by the quadrotor simulation. .
Finally, it is important to mention that the recursive expression of functiong(n) allows its easy implementation in any embedded system.
Conclusions
Medel, J. J., ken dagiti dadduma pay. Guevara, P., ken dagiti dadduma pay. Cruz, D.Napili nga Emner dagiti Sistema ti Real-Time; Nailian nga Instituto ti Politekniko: Siudad ti Mehiko, Mehiko, 2007. Carrillo, L.R.G.; Lopez, A.E.D., ken dagiti dadduma pay. Lozano, R., ken R.; Pégard, C.Quad a Panagtengngel ti Rotorcraft: Synsbaseret svævning og panaglayag; Springer Siensia ken Negosio a Media: Heidelberg, Tyskland; Londres, Storbritannien, 2012. Ti panagadal ti panagbiag ti tao.