Aplicación de vídeo: estimación en tiempo real de la posición de un vehículo en la carretera. Comprobación de doble interpolación en caso de que no se pueda esperar un sobremuestreo de la señal.
Aportes de esta Tesis
Validación de señales sensoriales en sistemas de instrumentación para la toma de decisiones en procesos críticos”. Con base en el trabajo de investigación realizado durante esta tesis, se llevó a un grupo global a desarrollar el estándar "Práctica recomendada IEEE para el tratamiento de señales aplicadas a transductores inteligentes" en IEEE Std vol., no., pp.1-109, 20 de diciembre.
1 INTRODUCCION
RESUMEN
Redundancia
La redundancia presente en una fuente de información es lo que nos permite cometer errores y aprender nuevos conceptos. En otras palabras, la redundancia genera grados de libertad de interpretación y es necesaria para detectar errores en la extracción de características o patrones de la información de la señal.
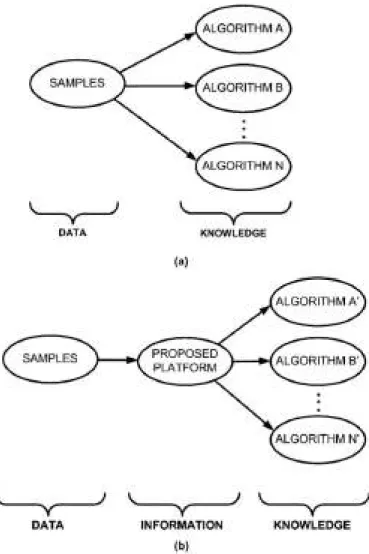
Datos, información y conocimiento
La gran diferencia con los métodos de compresión de datos existentes es que se conserva la estructura de la información de la señal. Esto expone el componente de información y facilita la adquisición de conocimientos como se describe a continuación.
SEÑAL
La información presente en una señal digital se puede derivar de la forma en que se relacionan las muestras. Este estándar representa la estructura de la información sensorial propuesta en esta tesis para el tratamiento de la señal sensorial en el punto de adquisición.

2 MUESTREO COMPLETO DE SEÑALES SENSORIALES UNIDIMENSIONALES
Introducción
Incluso con señales analógicas, no es necesario conocer el valor de la señal todo el tiempo. Otros tipos de cuantificación coinciden con la función de densidad de probabilidad de la señal esperada.

Descripción de los algoritmos
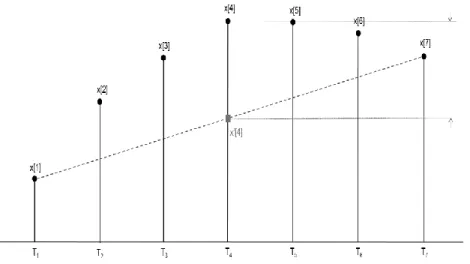
Las muestras centrales marcan los límites naturales de los segmentos de señal con un comportamiento uniforme. El algoritmo que se describe a continuación compara la ruta de la señal con la lineal.

Ejemplo del algoritmo aplicado a una señal empleando MatLab
El algoritmo requiere sólo unas pocas operaciones: suma, resta y división por dos (que podría implementarse fácilmente como un desplazamiento en un registro binario) en cada iteración. Representación simplificada de señales unidimensionales y bidimensionales para extracción de información en tiempo real Figura 2.11.

Extracción de características de la señal
Al analizar los valores de los máximos y mínimos, se detecta fácilmente el período de oscilación y si las oscilaciones son estables, decrecientes o crecientes. Un ejemplo de aplicación sería la eliminación del desplazamiento de la línea base provocado por la unión de los puntos de inflexión.
Patrones de comportamiento
- Supersegmentos
- Detección de ruido impulsivo
- Estimación de tendencia
- Estimación del ancho de banda para segmentos de la señal
- Estimación de frecuencia y fase de un patrón oscilatorio
Después de cada iteración, la señal resultante se analiza en busca de una señal periódica detectada por la varianza de la posición temporal del máximo tendiendo a cero. Evolución de la varianza de la posición de máximos para el caso de una señal aperiódica.
Análisis de los errores de interpolación
Representación formal de la señal sensorial
Al analizar los máximos y mínimos, se puede detectar fácilmente el período de oscilación y si las oscilaciones son estables, decrecientes o crecientes.
Reconstrucción de la señal a partir de las muestras esenciales
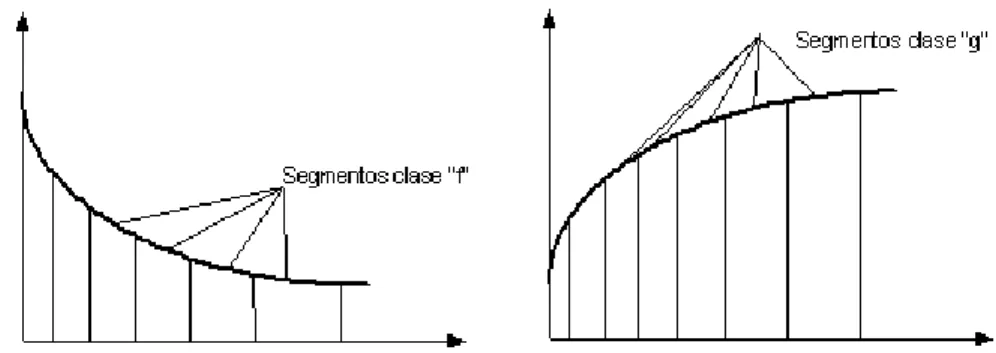
La señal reconstruida se puede describir como una combinación lineal de escala de tiempo y funciones elementales desplazadas. Dos formas básicas generan la señal, una para el subespacio inferior de la línea entre las muestras esenciales y otra para el superior, como se muestra en la Fig. Dependiendo de los valores de dos parámetros α y β, se forman los segmentos que conectan las muestras. generado esencial.
Si se utiliza la interpolación lineal para reconstituir la señal, las dos funciones convergen en una línea que conecta los patrones esenciales.
Estrategias de selección de muestras esenciales
- Condición de sobremuestreo
- Condición de no sobremuestreo
Si el error es menor que el prefijo del valor, significa que la muestra 2 no lleva información, ya que su valor se puede obtener de sus vecinos. La pregunta es: qué patrón se debe marcar como importante y cuál marcará el comienzo de un nuevo segmento. El algoritmo es más complicado porque la primera interpolación para el siguiente segmento incluye las muestras 4, 5 y 6; muestras que ya han sido adquiridas y deben almacenarse en la memoria.
Si no hay sobremuestreo, el valor de la muestra es más importante que cómo se compara con sus vecinos.

2. 10 Conclusiones
3 APLICACIONES EN SEÑALES UNIDIMENSIONALES
Filtrado de señales empleando representación MCT
Es posible analizar la señal en cada iteración ya que el triple MCT resultante está disponible. Los primeros segundos son importantes para estimar la magnitud del terremoto, ya que las ondas P viajan más rápido que las ondas S (secundarias). Estas ondas son las que generan el desplazamiento del suelo, provocando daños dependiendo de la magnitud del terremoto.
Una representación simplificada de señales multidimensionales y bidimensionales para la extracción de información en tiempo real Figura 3.4 Los primeros 10 segundos de la señal en la Figura 3.3.

Análisis de señales de vibraciones para detectar y clasificar fallas en rodamientos
La Figura 3.8 muestra una señal obtenida con un defecto de pista interna de 7 mil y la Figura 3.9 muestra un zoom de 50 ms de la señal. Cuando se aplica la estructura MCT a este tipo de señal, los máximos locales corresponden a los máximos locales de la señal circundante, lo que permite detectar y clasificar el tipo de modulación de la señal. La Figura 3.11 muestra la clasificación obtenida por falla de vía interna para 7, 14 y 21 mil.
Una representación simplificada de señales multidimensionales y bidimensionales para la extracción de información en tiempo real Figura 3.11.

Análisis de señales biológicas: Aplicación de la representación MCT a la detección de fibrilación
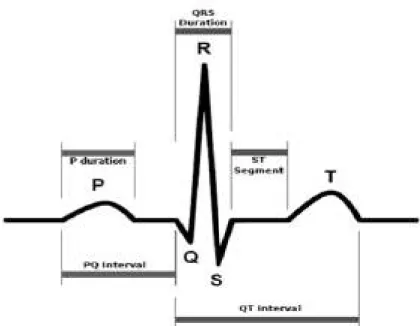
El vector de clase (n) de la estructura MCT contiene los máximos y mínimos de la señal segmentada. La Figura 3.17 muestra los resultados experimentales de la detección del complejo QRS para una señal de la base de datos. Durante el episodio de FV, la detección del complejo QRS sigue el comportamiento caótico de la señal.
El diagrama de bloques del algoritmo de detección de FV propuesto se muestra en la Figura 3.21.
Determinación de la velocidad de un móvil procesando el sonido pasante
Una representación simplificada de señales unidimensionales y bidimensionales para la extracción de información en tiempo real. Figura 3.24 Salida del algoritmo discriminador de audio móvil aplicado a la señal en la imagen. Los filtros lineales de paso bajo estropean la pendiente de la señal y, por tanto, destruyen la información útil. . El resto de la señal es ruido provocado por el viento y otro tipo de sonidos habituales en la ciudad.
El resto de la señal se compone de ruido provocado por el viento e interferencias propias de una ciudad.

4 APLICACIONES EN IMÁGENES Y VIDEO
Aplicación en video: Estimación en tiempo real de la posición de un vehículo en ruta
A través del procesamiento de imágenes se reconocen objetos, rostros, personas, gestos, movimientos, colores, texturas y todo lo que permita la riqueza de información presente en una imagen. Por otro lado, observando la evolución temporal de los píxeles esenciales en la representación MCT de la imagen, es posible estimar la velocidad del vehículo y obtener información sobre el tiempo de conducción del conductor sin detenerse. Esta información indica la irregularidad en la ruta que, junto con la información de velocidad, podría indicar una situación de peligro.
Finalmente, la suciedad del parabrisas se puede evaluar promediando a largo plazo una secuencia de imágenes basada en la persistencia de la mancha.
VIDEO
Aplicación en imágenes: Procesamiento de
Imágenes Térmicas aplicado a cámaras infrarrojas de Bajo Costo
Cantidad de pixeles esenciales. (Cpix)
Máximo de mayor valor. (MMax)
Se ejecutan dos procesos básicos: el crecimiento temporal de máximos y la evolución espacial de la energía térmica en cada región. Se busca el máximo absoluto de la imagen y se registra la evolución temporal de las regiones vecinas en fotogramas sucesivos, ver Fig. la imagen.
Representación simplificada de señales unidimensionales y bidimensionales para extracción de información en tiempo real Figura 4.19 Imagen térmica del refrigerante al inicio (arriba) y al final de la prueba (abajo).

5 CONCLUSIONES Y TRABAJO FUTURO
Conclusiones generales
Trabajo futuro y desarrollos en curso
- Señales sensoriales industriales
- Procesamiento de señales sísmicas
- Detección de humo en video
Se supone que el algoritmo ha aprendido la dinámica de la señal cuando los valores se estabilizan. La presencia de humo en el estado original deteriora los bordes de la imagen de fondo. Para la detección de color, se suelen utilizar modelos de color que distinguen la crominancia de la luminancia.
Esta representación simplificada contiene descriptores que capturan la esencia de la información necesaria para inferir regiones pertenecientes al humo o al fuego.

Paciello, "Smart Sensor Efficient Signal Processing for Earthquake Early Detection IEEE International Symposium on Measurements &. Liscovsky, "Smoke Detection Using Simplified Descriptions of Video Information IEEE International Conference on Industrial Technology (ICIT), Toronto, ON, 2017, pp . Adaptive Reference Levels in a Level-Crossing Analog-to-Digital Converter EURASIP Journal on Advances in Signal Processing Volume 2008, Article ID 513706.
Torabnezhad M, Ali Aghagolzadeh, HadiSeyedarabi, "Visible and IR image fusion algorithm for short-range smoke detection," IEEE International Conference on Robotics and Mechatronics, 2013.
ANEXO A
IEEE Recommended Practice for Signal Treatment Applied to Smart
Microsoft, Visual C++, Visual C#, Visual Studio, and Windows are registered trademarks of Microsoft Corporation in the United States and/or other countries.
Important Notices and Disclaimers
Concerning IEEE Standards Documents
Compliance with the terms of any IEEE standard document does not imply compliance with applicable legal requirements. For more information about the IEEE-SA or the IEEE standards development process, visit the IEEE-SA website at http://standards.ieee.org. Any errata for all IEEE standards can be accessed on the IEEE-SA website at the following URL: http://standards.ieee.org/findstds/errata/index.html.
By publication of this standard, no position is taken by the IEEE regarding the existence or validity of any patent rights in connection therewith.
Participants
Letters of assurance may state whether the applicant is willing or unwilling to grant a license under the patent rights without compensation or at reasonable prices, on reasonable terms and conditions that are demonstrably free of any unfair discrimination against applicants seeking to obtain such licenses. IEEE is not responsible for identifying the essential patent claims for which a license may be sought, for making inquiries as to the legal validity or scope of the patent claims, or for determining whether any license terms or conditions set forth in connection with the submission of the Assurance Letter, if any, or in any license agreements are reasonable or non-discriminatory. Users of this standard are expressly informed that the determination of the validity of any patent rights and the risk of infringement of such rights is entirely their responsibility.
Introduction
- Overview
- Scope
- Purpose
- Conformance
- Normative references
- Definitions, abbreviations, and units
- Definitions
- Abbreviations
- Need for the recommended practice
- Introduction
- A Simple example of application
- Outline of the recommended practice
- Smart transducer functional specification
- ISO/IEC/IEEE 21451 reference model
- User’s network
- NCAP network interface
- ISO/IEC/IEEE 21450 NCAP transducer services
- ISO/IEC/IEEE 21450/IEEE 1451.X NCAP module communication interface
- Physical interface between NCAP and TIM
- ISO/IEC/IEEE 21450/IEEE 1451.X TIM communication interface
- ISO/IEC/IEEE 21450 TIM transducer services
- IEEE 21451-001 TIM transducer signal treatment services
- Signal conditioner and data conversion
- Transducers
This clause provides a description of the functions to be included in ISO/IEC/IEEE 21451 intelligent transducers. The user network is beyond the scope of the ISO/IEC/IEEE 21451 family of standards. The physical interface between the NCAP and the Transducer Interface Module (TIM ) is defined in other documents of the IEEE 1451.X family of standards.
The ISO/IEC/IEEE 21450/ IEEE 1451.X TIM communication interface is defined in the corresponding documents of the IEEE.