Introducción
Estado del arte
A continuación se muestran algunos trabajos que utilizan técnicas de optimización basadas en algoritmos genéticos para optimizar diseños mecánicos. En 2011, Kittipichai [16] propuso un procedimiento de optimización para el diseño de la estructura de camas de hospital utilizando algoritmos genéticos.
Motivación
Objetivo general
Objetivos específicos
Contribución
Además, es un trabajo que forma parte de un proyecto más complejo y con objetivos de innovación, ya que se pretende explotar comercialmente CamaBot en beneficio de la sociedad mexicana y latinoamericana. En ese sentido, el aporte consiste también en promover y fortalecer esfuerzos en el marco del ejercicio de innovación vinculando proyectos con potencial de alto impacto social y grupos de investigación académica.
Organización de la tesis
Artículos generados
Mecanismo de elevación de la CamaBot
Primer modelo cinemático del mecanismo de elevación
Como primera aproximación, el mecanismo de elevación se definió como un mecanismo de 6 barras (M6B). La Figura 2.5 muestra la estructura cinemática del mecanismo en general. De la Figura 2.5 se puede establecer la ecuación vectorial 2.1, que se satisface para cada posición del mecanismo.
Problemática
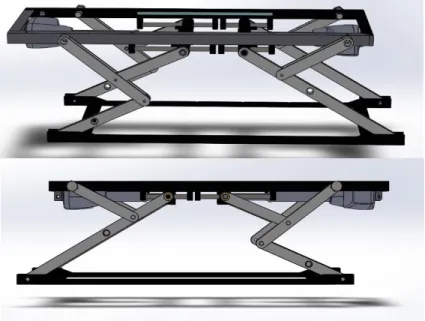
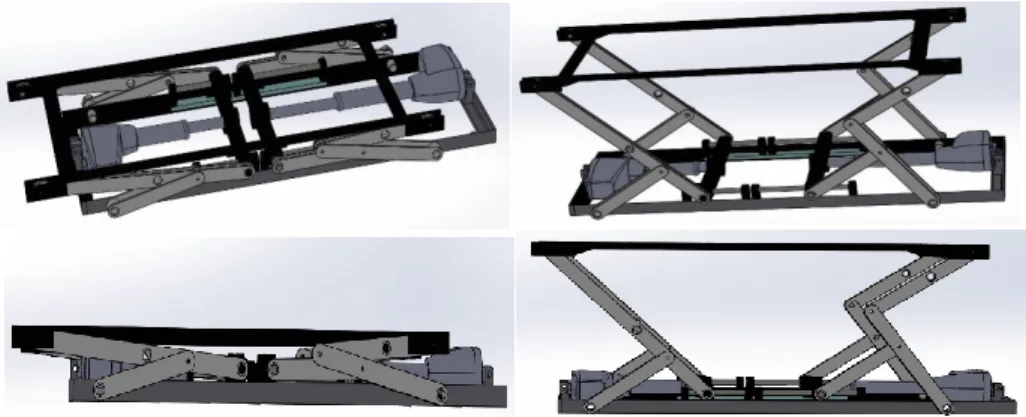
Por lo tanto, la altura del mecanismo se puede determinar por la posición del punto a o d, si la orientación del vector 𝑞6 es cero. La Figura 2.9 muestra el soporte del deslizador, esta parte está conectada a los actuadores; La Figura 2.10 muestra estos elementos como parte del montaje final del tramo de alzado. Este capítulo describe en detalle los 4 mecanismos básicos de CamaBot (soporte del colchón, panel, somier y mecanismo de elevación), proporciona una introducción a la parte de interés (mecanismo de elevación) y explica los problemas que se encontraron en dicha sección, en el así mismo como se presentan algunas imágenes del proceso de montaje del mecanismo y su resultado final.

Modelo cinemático del mecanismo de elevación
Cálculo de fuerzas
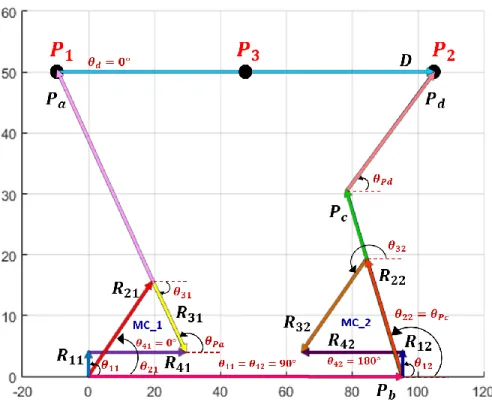
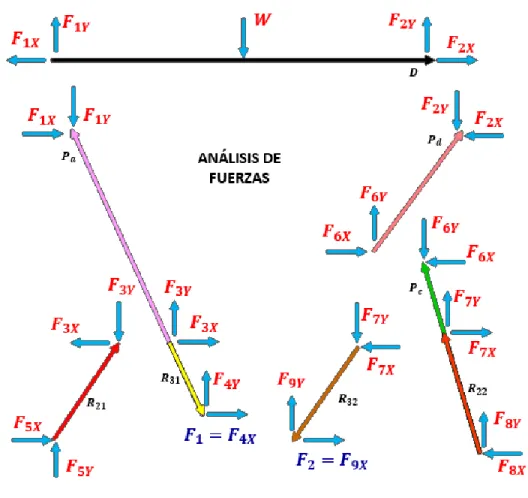
El objetivo de este trabajo es minimizar el error de seguimiento de la trayectoria y al mismo tiempo limitar las fuerzas ejercidas sobre los actuadores mediante la elección óptima de sus articulaciones, siguiendo una trayectoria deseada. A partir de la Figura 3.4, considerando como referencia un sistema inercial diestro, se pueden formular las ecuaciones para determinar las fuerzas internas del mecanismo. De las ecuaciones anteriores se pueden obtener las fuerzas internas del mecanismo, de las cuales se identifica claramente que la fuerza 𝐹4𝑋 corresponde a la fuerza del actuador 1 (𝐹1= 𝐹4𝑋) y que la fuerza 𝐹9𝑋 corresponde a la fuerza del actuador 2 ( 𝐹2= 𝐹9𝑋).
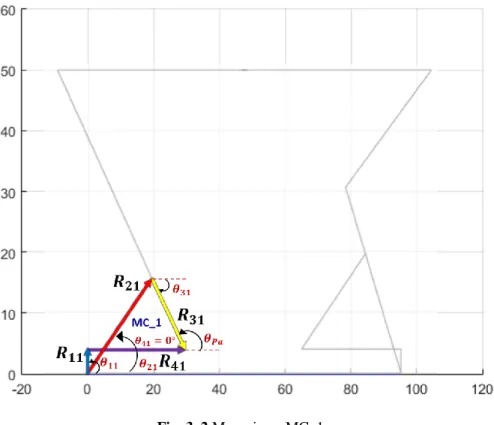
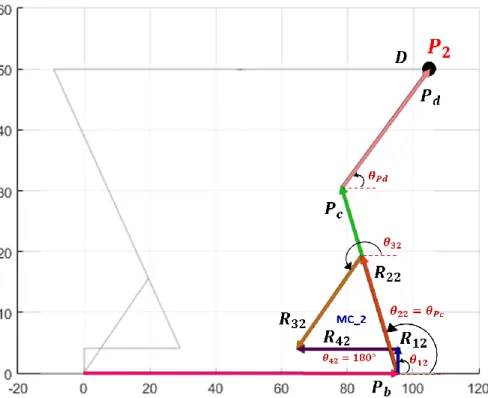
Se concluye entonces que la cinemática del mecanismo en general afecta el cálculo de las fuerzas de los actuadores 1 y 2, en los eslabones 𝑅41 y 𝑅42, respectivamente. Estas fuerzas se utilizan como restricciones en el problema de optimización planteado en este trabajo. En este capítulo se presenta el diseño del modelo cinemático del mecanismo de elevación, el mismo se divide en dos secciones, la primera se refiere a la formulación de la cinemática del mecanismo MC_1 y los eslabones involucrados en esa parte, la segunda sección involucra el mecanismo MC_2 y al resto de eslabones del mecanismo de elevación.
Optimización con algoritmos evolutivos
Algoritmos genéticos
- Codificación de problemas
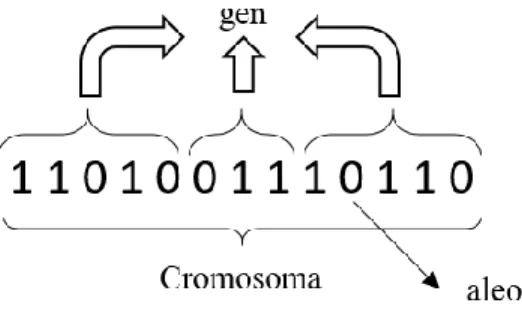
Para resolver un problema, partimos de un conjunto inicial de individuos, llamado población, generado aleatoriamente. El conjunto de parámetros representados por un cromosoma particular se llama genotipo. A cada parámetro se le asigna un número determinado de bits y se realiza una discretización de la variable representada por cada gen.
Aunque se acusa a estas representaciones de degradar el paralelismo implícito de las representaciones binarias, permiten el desarrollo de operadores genéticos más específicos del dominio de aplicación del Algoritmo Genético. Evaluación: después de inicializar la población o crear una nueva solución sucesora, es necesario calcular el valor de aptitud (función objetivo) de las soluciones candidatas [21]. Selección: A través de la selección se trata de dar prioridad en la evolución a aquellas soluciones con mayor valor objetivo, imponiendo así un mecanismo que permita la supervivencia de los individuos más aptos.
Hay muchas maneras de lograr esto y el desempeño competente del algoritmo depende de un mecanismo de recombinación bien diseñado. Idealmente, la solución de progenie obtenida por recombinación no será idéntica a ninguno de los padres, sino que contendrá información combinada de ambos [21]. La Tabla 4.2 muestra el pseudocódigo de un AG, que muestra, después de generar y evaluar la población inicial, los operadores genéticos (selección de padres, su recombinación, mutación de la(s) descendencia(s) y reemplazo del individuo actual por una descendencia) son se aplica a cada uno de los individuos en su entorno vecinal de forma iterativa hasta alcanzar la condición de terminación.
Problema de optimización
Si 𝑓(𝑥) no es lineal ni cuadrática y/o las restricciones no son lineales, tenemos un problema de programación no lineal. Cuando las ecuaciones 4.1 y 4.2 no se incluyen en un problema de optimización, decimos que tenemos un problema de optimización sin restricciones.

Planteamiento del problema de optimización del mecanismo de elevación
- Función objetivo
- Vector de variable de diseño
- Restricciones
- Problema de optimización del mecanismo de elevación
El vector de diseño 𝑥𝑐 es fijo, donde las variables de diseño 𝑟11, 𝑟21, 𝑟31, 𝑟12, 𝑟22, 𝑟32, 𝑃𝑎, 𝑃𝑐, 𝑃𝑐, 𝑃 son la longitud de los eslabones y 𝑃 𝑚 𝑖𝑛 es un valor arbitrario para la configuración de la distancia de enlace 𝑟41. Donde la ecuación 4.6 es una restricción para que no se supere la altura mínima del CamaBot, las ecuaciones 4.7 y 4.8 son las restricciones para el límite de las fuerzas de los eslabones 𝑟41 y 𝑟42, donde se establece que no debe exceder los 11000 N Ax no mencionado en capítulos anteriores, el objetivo de este trabajo es limitar las fuerzas que ejerce la bancada sobre los puntos de apoyo de los accionamientos mediante a.
Con base en lo descrito en la sección anterior, el problema de optimización para el mecanismo de elevación se describe en la ecuación 4.9, donde la función objetivo se minimiza (ecuación 4.4). En este capítulo se presenta una breve descripción de qué son los algoritmos evolutivos, las diferentes estrategias que se pueden encontrar, se describe su función y se presenta su pseudocódigo, de igual manera se hace una descripción de los algoritmos genéticos (tipo de algoritmo evolutivo elegido en este trabajo). ), se presenta el problema de optimización general y se describen las partes matemáticas que lo componen, finalmente se establece el planteamiento del problema de optimización para el mecanismo de elevación del Camabot.
Simulación
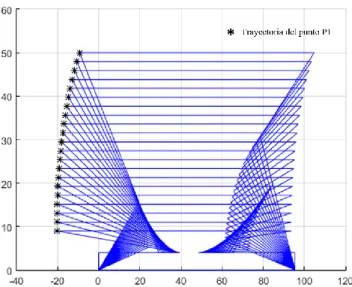
Usando los valores de la tabla 5.1 y las dimensiones de las conexiones actuales con las fuerzas de su mecanismo de elevación de la tabla 5.2, realizamos una simulación del mecanismo de elevación en el programa Matlab®, y el resultado es la figura 5.3. La Tabla 5.2 muestra los valores de las dimensiones actuales y las fuerzas que actúan sobre los puntos de apoyo de los actuadores del mecanismo de elevación utilizados en la simulación de la trayectoria como se muestra en la Figura 5.3. El resultado de 10 simulaciones se presenta en la Tabla 5.3, y el mejor resultado está marcado en rojo.De manera similar, la Figura 5.4 muestra la simulación del mejor resultado encontrado por GA para el diseño del mecanismo de elevación de los resultados de la Tabla 5.3.
La Figura 5.4 presenta la propuesta de diseño del mecanismo de elevación obtenido con el programa de optimización usando GA (los puntos verdes corresponden al recorrido original del mecanismo de elevación y los puntos rojos corresponden al recorrido realizado por el mecanismo obtenido con AG). en otras palabras, se presenta la mejor simulación de las primeras 10 simulaciones en la Tabla 5.3. Los valores de la trayectoria trazada por el mecanismo obtenidos por GA (puntos rojos en la Figura 5.4) se muestran en la Tabla 5.4. Los valores del vector de diseño y las fuerzas 𝐹1 y 𝐹2 obtenidos por GA para el mecanismo de la Figura 5.5 se muestran en la Tabla 5.6.
Los valores del vector de diseño y las fuerzas 𝐹1 y 𝐹2 obtenidos del GA del mecanismo de la Figura 5.7 se muestran en la Tabla 5.9. El resultado que se muestra en la Figura 5.7 muestra un mecanismo que es algo diferente del mecanismo CamaBot original en términos de dimensiones. Los valores del vector de diseño y las fuerzas 𝐹1 y 𝐹2 obtenidos del GA del mecanismo de la Figura 5.8 se muestran en la Tabla 5.12.
Análisis de resultados, conclusiones y trabajo futuro
54 comparación de potencia, altura mínima, similitud del mecanismo Camabot original con el diseño del mecanismo obtenido por el algoritmo genético. Como se mencionó anteriormente, el factor para determinar qué mecanismo obtuvo el mejor resultado es la altura mínima, en la Tabla 6.2 se presentan los resultados de las trayectorias de todos los mecanismos obtenidos por el GA, excepto el mecanismo #1, que corresponde a la trayectoria original del mecanismo de elevación. Al comparar la coordenada (𝑦) de cada mecanismo obtenida por el GA con la coordenada (𝑦) del mecanismo original, concluimos que el mecanismo n.° 5 es el más cercano a la altura máxima y mínima del mecanismo original.
56 resultados de las fuerzas y la trayectoria en las coordenadas (𝑦) para cada mecanismo, la simulación del resultado del mecanismo #5 se presenta en la Figura 6.1. La figura 6.2 muestra la comparación del mecanismo de elevación original y el mecanismo obtenido por AG, en la parte 6.2a se encuentra la posición más alta del mecanismo y en la parte 6.2b la posición mínima. 2 Comparación del mecanismo de elevación original vs. obtenido por AG (a: altura máxima, b: altura mínima).
57 Como se ve en la Figura 6.2, se muestra la comparación del mecanismo original (dibujo vectorial negro con estrella roja) y el diseño del mecanismo obtenido por GA (dibujo vectorial azul con estrella negra) desde la altura máxima hasta la altura mínima. fundada por diseñadores de Camabot. El valor de las coordenadas (𝑦) del mecanismo original está resaltado en rojo en la Tabla 6.3. 4 Comparación de las fuerzas del mecanismo original versus el mecanismo obtenido por GA a diferentes alturas.